11.04.2015
OTOMATİK KONTROL VİZE SINAVI
S-1
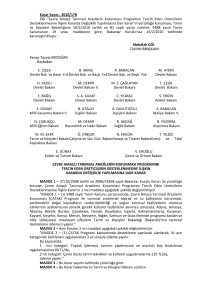
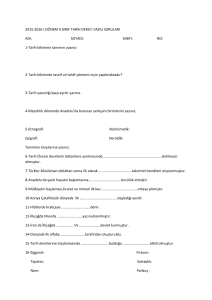
Şekilde verilen sıvı seviye kontrol sisteminde Qi (t ) debisi alan kontrollü DC makinede (viskoz sürtünme, B=0)
θ (t) açısı ile kontrol edilmektedir. Sıvı seviye sisteminde qo (t) = DH(t) ile değişmektedir.
(
Kh
θ (s)
=
, y(t) = K p H(t); ,
Qi (s) τ s + 1
H(t) =
1
(Qi (t) − qo (t) ) dt , A : Havuz taban alanı)
A∫
a) Şekilde verilen sistemin t-domeni ve s-domenine ait dinamik denklemlerini yazınız.
y r (t) referans giriş, D(z) ayrık zaman kontrolcü, T örnekleme zamanı olmak üzere sisteme ait ayrık
b)
zaman kapalı çevrim kontrol blok diyagramını çiziniz. Her blok için transfer fonksiyonlarını yazınız.
S-2
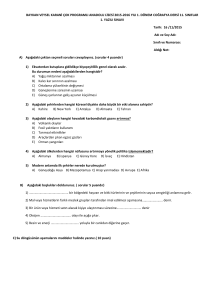
Yanda verilen sistem için, = basamak giriş için;
r (t)
2e −3t
y (t) i) ifadesiniyazınız.
ii) t = kT olmak üzere ifadesini t domeninden doğrudan elde ediniz.
iii) Kompleks değişkenler teorisinden rezidü yöntemini kullanarak elde ediniz.
iv) Ters Z dönüşümü = =? elde ediniz.
g(t)
S-3 Bir sistemi tanımlayan diferansiyel denklem
d 2θ (t) k dθ (t) g
+
+ sin θ (t) = u (t)θ (t) ile
dt 2
m dt
l
verilmektedir.
dx (t )
= f ( x (t )) + g ( x (t ))u (t ) formunda yazınız.
dt
a)
Sisteme ait durum denklemlerini
b)
x (t ) = x0 , u (t ) = u0 çalışma noktası için sisteme ait durum denklemlerini
∆x(t )
= A*∆x (t ) + B*∆r (t ) yazınız.
∆t
c)
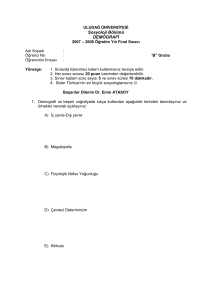
S-4
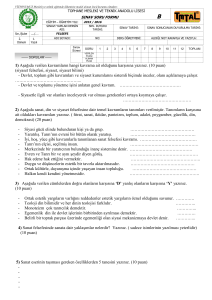
Yanda kapalı çevrim kontrol blok diyagramında;
Td(s)
R(s)
C(s)
E(s)
G1(s)
G2(s)
G3(s)
a)
C(s) çıkışını elde ediniz.
b)
= , = 10
5
,
= 0.1;
0.1 + 1
= 2 olmak üzere ∞ =? Hesaplayınız.
=
Başarılar, Süre 90 dk
Prof. Dr. Ayhan ÖZDEMİR, Yrd. Doç. Dr. Zekiye ERDEM
1
C-1:
a.
t-domein
1.
e f (t ) = u (t ) K
2.
e f (t ) = Ri f (t ) + L
3. Te
1.
dt
Te = Tm
5.
Tm = J
dw(t )
dt
dθ (t )
dt
Kh
7. θ (t ) =
Q (t )
τ s +1 i
8. qo (t ) = DH (t )
dH (t )
9. Qi (t ) − qo (t ) = A
dt
6.
w(t ) =
E f ( s) = U (s) K
E f ( s ) = RI f ( s ) + L s I f ( s )
di f (t )
= K i i f (t )
4.
s-domein
2.
I f (s) =
E f ( s)
R + Ls
3. Te = K i I f ( s )
4.
Te = Tm
5.
Tm = J s Ω(s) → Ω(s) =
6.
Ω(s) = θ ( s )s → θ ( s ) =
Ω(s)
s
Kh
Q (s)
τ s +1 i
qo ( s ) = DH ( s )
7. θ ( s )
8.
=
9.
Qi ( s ) − qo ( s ) = A s H ( s )
Qi ( s ) = H (s) ( A s + D ) →
10.
y (t ) = K p H (t )
Tm
Js
10.
H (s)
1
=
Qi ( s ) A s + D
Y ( s) = K p H ( s)
b) yr (t) referans giriş, D(z) ayrık zaman kontrolcü, T örnekleme zamanı olmak üzere sisteme ait ayrık
zaman kapalı çevrim kontrol blok diyagramını çiziniz. Her blok için transfer fonksiyonlarını yazınız.
veya
2
C-2
y * (t) = r * (t) g* (t) → Y(z) = R(z) G(z)
i)
∞
ii)
z-dönüşüm ifadesinden,
F ( z ) = ∑ f (kT )z − k
k =0
∞
∞
∞
k =0
k =0
k =0
G ( z ) = ∑ 2 e−3kT z − k = 2∑ e −3kT z − k = 2∑ (e −3T z −1 )k
∞
G (z) = 2∑ (e −3T z −1 ) k =
k =0
2z
z − e −3T
=
T = 0.2
2z
olarak hesap edilir.
z − 0.5488
∞
Aşağıdaki işlemler isteğe bağlıdır: z-dönüşüm ifadesinden, R ( z ) =
∑ u (kT ) z
−k
yazılır.
k =0
Burada örneklenmiş u (t ) birim basamak fonksiyonunun her k = 0,1, 2,3........ için değerinin “1”
olduğu
görülür.
Genel terim olarak f (kT ) = 1k yazılabilir. F ( z ) te yerine yazılır ise,
k
f(kT)
0
1
1
1
∞
∞
k =0
k =0
R ( z ) = ∑1k z − k = ∑ z − k
olarak elde edilir. Geometrik dizilere ait 2.
özellikten
2
1
3
1
…
1
∞
R ( z ) = ∑ ( z −1 ) = 1 + z −1 + z −2 + ...... =
k
k =0
R( z ) = Ζ {u (t )} =
Y ( z ) = R (z) G(z) =
1
z
=
−1
1− z
z −1
olarak hesaplanır.
z
olarak elde edilir. DOĞRUDAN YAZILABİLİR.
z −1
z
2z
2z2
olarak hesap edilir.
=
z − 1 z − 0.5488 ( z − 1)( z − 0.5488)
3
iii)
G( s) = L {2 e − t } → G( s) =
2
s+3
R ( s ) = L {u (t )} → R(s) =
1
yazılır.
s
Rezidü teoreminden;
n
d m −1
z
1
X ( z) = ∑
( s − si )m X ( s )
m −1
z − e sT s=si
i =1
(m − 1)! ds
Rezidü teoremi kullanılarak G ( z ) elde edilir.
1
1 d 1−1
2
z
G( z) = ∑
(
s
−
(
−
3))
1−1
s + 3 z − e( −3)T
i =1 (1 − 1)! ds
G ( z ) = ( s + 3)
2z
z − e −3T
G(z) =
2
z
s + 3 z − e −3T
=
T = 0.2
düzenlenir ise,
2z
z − 0.5488
olarak elde edilir.
Aşağıdaki işlemler isteğe bağlıdır: Yine Rezidü teoreminden R( z ) aşağıda verildiği gibi yazılır.
1
1 d 1−1 1
z
G( z) = ∑
(s)
1−1
(0)T
s z − e
i =1 (1 − 1)! ds
R( z ) = s
R( z ) =
1
z
s z − e0T
z
z −1
düzenlenir ise,
olarak elde edilir.
DOĞRUDAN YAZILABİLİR.
Buradan Y ( z ) aşağıdaki gibi hesaplanabilir;
z
2z
2z2
Y ( z ) = R (z) G(z) =
=
z − 1 z − 0.5488 ( z − 1)( z − 0.5488)
iv)
Y (z) =
Ters Z dönüşümü = =?
2z2
( z − 1)( z − 0.5488)
rezidü yöntemini kullanarak ters z-dönüşümü y (k ) elde edilişi
aşağıda verilmiştir.
y (kT ) = ( z − 1)
2z2
z k −1
( z − 1) ( z − 0.5488)
2 z zk
y(k ) =
( z − 0.5488)
2 z zk
+
→
( z − 1) z =0.5488
z =1
+ ( z − 0.5488)
z =1
2z2
z k −1
( z − 1) ( z − 0.5488)
y(k ) = 4.43 − 2.43 ⋅ (0.5488) k
4
z = 0.5488
d 2θ (t) k dθ (t) g
+
+ sin θ (t) = u (t)θ (t) olarak
dt 2
m dt
l
verilmiştir. önce durum değişkenleri tanımlanır sonra durum denklemleri elde edilir;
C-3 Sistemi tanımlayan diferansiyel denklem
i)
Durum değişkenleri tanımlanır.
x1 (t ) = θ (t )
x2 (t ) =
: konum
dx1 (t ) dθ (t )
=
dt
dt
d 2θ (t ) dx2 (t )
=
dt 2
dt
: hız
dir.
tanımlanan durum değişkenleri
d 2θ (t )
k dθ (t ) g
= u (t)θ (t) −
− sin θ (t )
2
dt
m dt
l
ifadesinde yazılır
ise,
dx1 (t )
= x 2 (t )
dt
1. Durum denklemi
dx2 (t )
k
g
= u (t) x1 (t ) − x2 (t ) − sin x1 (t )
dt
m
l
2. Durum denklemi olarak elde edilir.
İki durum denklemi
dx(t )
= f ( x(t )) + g ( x(t ))u (t ) formunda aşağıda verildiği gibi yazılır.
dt
dx1 (t )
x2 (t )
dt
0
+
u (t) olarak yazılabilir.
= g
k
x1 (t )
dx2 (t ) − sin x1 (t ) − x2 (t ) 12
3
m
l
424444
3 g ( x (t ))
dt 1444
1
424
3
f ( x ( t ))
dx ( t )
dt
b)
∆ x (t )
= A*∆x (t ) + B*∆r (t ) formunda yazabilmek için A* ve B* matrisleri hesap edilmelidir.
∆t
f1 =
dx1 (t )
= x 2 (t )
dt
f2 =
dx2 (t )
k
g
= u (t) x1 (t ) − x2 (t ) − sin x1 (t )
dt
m
l
olmak üzere,
5
∂f1
∂x
1
*
A =
∂f 2
∂x
1
∂f1
∂f1
∂x2
∂u
ve bir adet giriş olduğundan r1 (t ) = u (t) dir. B* =
matrisleri
∂f 2
∂
f
2
∂u x 0,u 0
∂x2 x ,u
0
0
hesaplanır.
∂f1
∂x
1
A* =
∂f 2
∂x
1
∂f1
0
∂x2
=
u0 − g cos x01
∂f 2
l
∂x2 x ,u
0
1
k
−
m
0
∂f1
∂u
0
B* =
=
x01
∂f 2
∂u x 0,u 0
∆x1 (t )
0
∆t
=
g
∆x2 (t ) u0 − cos x01
l
∆t
Elde edilen matrisler yerlerine yazılır.
1
∆x1 (t ) 0
k
+ ∆u (t )
−
∆x2 (t ) x01
m
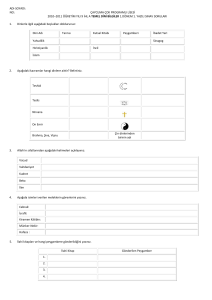
C-4: a)
Soruda verilen sistem iki giriş tek
çıkışlıdır. C(s) çıkışını elde etmek için
lineer sistemlerde toplamsallık
özelliği kullanılacaktır
C ( s ) = CR ( s ) + CT ( s ) .
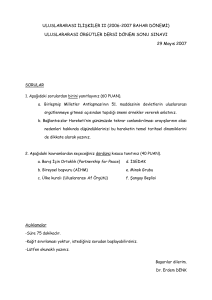
Önce Td ( s ) = 0 ve R ( s ) ≠ 0 için C R ( s ) elde edilir. Eş değer blok diyagram aşağıda verilmiştir.
Blok diyagramdan C R ( s ) ifadesi
doğrudan yazılır.
CR ( s ) =
G1 ( s )G2 ( s ) G3 ( s )
R(s)
1 + G1 ( s )G2 ( s ) G3 ( s )
Sonra ise, Td ( s ) ≠ 0 ve R ( s ) = 0 için CT ( s ) elde edilir. Eş değer blok diyagram aşağıda verilmiştir.
6
Blok diyagramdan CT ( s ) ifadesi doğrudan yazılır.
CT ( s ) = −
C ( s ) = CR ( s ) + CT ( s )
C (s) =
G3 ( s )
Td ( s )
1 + G1 ( s )G2 ( s ) G3 ( s )
olmak üzere elde edilen sonuçlar yerlerine yazılır,
G1 ( s )G2 ( s ) G3 ( s )
G3 ( s )
R(s) −
Td ( s ) elde edilir.
1 + G1 ( s )G2 ( s ) G3 ( s )
1 + G1 ( s )G2 ( s ) G3 ( s )
!
= , = 10, = ". , = 0.1; = 2 ile verilen
ifadeler yerlerine yazılır
2
5
5
10
0.1s + 1
C ( s ) = 3s + 1 0.1s + 1 R ( s ) −
Td ( s ) ve düzenlenir ise,
2
5
2
5
1+
10
1+
10
3s + 1
0.1s + 1
3s + 1 0.1s + 1
C (s) =
5 ( 3s + 1)
100
R( s) −
T ( s)
( 3s + 1)( 0.1s + 1) + 100
( 3s + 1)( 0.1s + 1) + 100 d
= 2 ise R ( s ) =
C (s) =
ifadesi elde edilir.
2
0.1
ve = 0.1 ise Td ( s ) =
girişler yerlerine koyulur.
s
s
5 ( 3s + 1)
100
2
0.1
−
ve ∞ hesabı için son değer
( 3s + 1)( 0.1s + 1) + 100 s ( 3s + 1)( 0.1s + 1) + 100 s
teoremi kullanılır.
100
2
C ( ∞ ) = lim s C ( s ) = lim s
s →0
s →0
( 3s + 1)( 0.1s + 1) + 100 s
C (∞) =
200 0.5 199.5
−
=
101 101 101
→
−
0.1
( 3s + 1)( 0.1s + 1) + 100 s
5 ( 3s + 1)
C (∞ ) = 1.975 değeri hesap edilir.
7