ÇUKUROVA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
YÜKSEK LİSANS TEZİ
ORAY OR
EN KÜÇÜK KARELER YAKLAŞIMI
MATEMATİK ANABİLİM DALI
ADANA, 2006
ÖZ
YÜKSEK LİSANS TEZİ
EN KÜÇÜK KARELER YAKLAŞIMI
ORAY OR
ÇUKUROVA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
MATEMATİK ANABİLİM DALI
Danışman : Öğr.Gör.Dr.Yusuf Karakuş
Yıl : 2006, Sayfa:98
Jüri : Öğr.Gör.Dr.Yusuf KARAKUŞ
Doç.Dr.Doğan Dönmez
Yrd.Doç.Dr.Mehmet KÜÇÜKASLAN
Bu çalışmada Yaklaşım Teorisi içinde önemli yeri olan ‘En Küçük Kare
Yaklaşımları incelenmiştir. Ayrıca, En Küçük Kare Yaklaşımları ile ‘Gram
Matrisleri ve Determinantları’ arasındaki ilişki de incelenmiştir.
Anahtar Kelimeler: İç Çarpım Uzayı , En Küçük Kareler yaklaşımı,
Normlu Uzaylar , Polinomlarla yaklaşım, Fourier Serileri.
I
ABSTRACT
MSc THESIS
LEAST SQUARES APPROXIMATION
ORAY OR
DEPARTMENT OF MATHEMATICS
INSTUTE OF NATURAL AND APPLIED SCIENCES
UNIVERSITY OF ÇUKUROVA
Supervisor : Öğr.Gör.Dr.Yusuf KARAKUŞ
Year : 2006, Pages:99
Jury : Öğr.Gör.Dr.Yusuf Karakuş
Assoc.Prof.Doğan DÖNMEZ
Yrd.Doç.Dr.Mehmet KÜÇÜKASLAN
In this thesis, Least Square Approximation, which as got an important part in
approximation theory, is studied in details. In addition, the relations between Least
Square Approximation and Gram Matrices and Determinants are studied.
Key Words : Inner Product Space , Least Squares Approximation,
Normed
Spaces , Approximation by Polynomials , Fourier Series.
II
TEŞEKKÜR
Bu çalışmanın hazırlanması sırasında bilgi ve tecrübeleriyle beni
aydınlatan, çalışmanın her aşamasında yardımlarını esirgemeyen ve çalışmanın
tamamlanmasını sağlayan , saygıdeğer hocam Sayın Öğr. Gör. Dr. Yusuf
KARAKUŞ’a teşekkürlerimi sunarım. Ayrıca , yardımlarından dolayı tüm
Matematik Bölümü akademik personeline ve manevi desteklerinden dolayı aileme
teşekkür ederim.
III
İÇİNDEKİLER
Sayfa No
ÖZ............................................................................................................................I
ABSTRACT.............................................................................................................II
TEŞEKKÜR.............................................................................................................III
1. GİRİŞ.................................................................................................................1
2. TEMEL TANIM VE TEOREMLER.................................................................2
2.1. İç Çarpım Uzayları.....................................................................................2
2.2. İç Çarpım Uzayları İçin Açı Geometri........................................................8
2.3. Ortonormal Sistemler..................................................................................11
2.4. Fourier (Ortogonal) Açılımları....................................................................21
2.5. Fourier Açılımlarının Minimum Özellikleri................................................24
3. EN KÜÇÜK KARELER YAKLAŞIMI.............................................................29
3.1. En Küçük Kareler Yaklaşımı.......................................................................29
3.2. Normal Denklemler.....................................................................................36
3.3. Gram Matrisi ve Determinantı.....................................................................39
3.4. Gram Determinantın Özellikleri..................................................................60
3.5. Kapalılık ve Sonuçları.................................................................................67
3.6. Tam İç Çarpım Uzayının Geometrik Özellikleri.........................................86
KAYNAKLAR.........................................................................................................94
ÖZGEÇMİŞ..............................................................................................................95
1.GİRİŞ
Oray OR
1.GİRİŞ
Yaklaşım Teorisi genel hatları ile Matematiksel Analiz içinde yer alır. Bu
Teori içinde önemli bir yeri olan ‘ En Küçük Kareler Yaklaşımı’ bu tezde
incelenmiştir.
Tezin birinci bölümünde iç çarpım uzaylarındaki en iyi yaklaşım yani En
Küçük Kareler Yaklaşımının yanında , en küçük kareler yaklaşımı ile Gram Matrisi
ve Determinantı arasındaki ilişki de incelenmiştir.
Tezin ikinci bölümünde çalışmamızın kaynağını oluşturan temel tanım ve
teoremlere yer verilmiştir.
Tezin üçüncü bölümünde ise bazı uzaylarda En Küçük Kareler yaklaşımı,
normal denklemler , Gram Matrisi ve Determinantı , kapalılık kavramı ve tam iç
çarpım uzayı konularına yer verilmiştir.
1
2.TEMEL TANIM VE TEOREMLER
Oray OR
2. TEMEL TANIM VE TEOREMLER
2.1 İç Çarpım Uzayları
En Küçük Kareler Yaklaşımı’nı tanımlamadan önce iç çarpım uzayları
tanımlanarak temel özellikleri verilecektir.
Tanım 2.1.1 : X bir reel vektör uzayı olsun. X x X kümesinden R reel
sayılar kümesine tanımlanan ve ∀ x, y, z ∈ X için ;
a)
( x + y , z ) = ( x, z ) + ( y , z )
b)
( x, y ) = ( y , x )
c)
(α x, y ) = α (x, y )
d)
( x, x ) ≥ 0
,
( x, x ) = 0
⎫
⎪
⎪
⎪
( Simetri)
⎪
⎬
( Homojenlik ) ⎪
⎪
⎪
⎪
( Pozitiflik )
⎭
( Lineerlik )
⇔ x=0
(2.1.1)
özelliklerini sağlayan ( . , . ) fonksiyonuna bir iç çarpım ve X vektör uzayına da bir
iç çarpım uzayı denir.
Benzer tanım C/ kompleks sayılar kümesi olmak üzere kompleks vektör
uzayları için de yapılabilir. Ancak bu durumda ( x, y ) iç çarpımı bir kompleks sayı
olur ve 2.1.1(b) eşitliği
b')
( x, y ) = ( y , x )
(Hermitiyen Simetri )
b' eşitliği ile yer değiştirir. Burada sağdaki üst çizgi kompleks eşleniği
göstermektedir.
2
(2.1.1)
2.TEMEL TANIM VE TEOREMLER
Oray OR
Örnek 2.1.1: X = R n , x = ( x1 , x2 , K , xn ) , y = ( y1 , y2 , K , yn ) ve
wi , i = 1, K , n pozitif sayıları olsun. R n ’de (x,y) iç çarpımı
n
( x, y ) = ∑ wi xi yi
i =1
şeklinde tanımlanır.
Örnek 2.1.2: X = C/ n kompleks Öklid uzayı , x , y ∈ C/ n ve wi , i = 1, K, n
pozitif sayılar olmak üzere , C/ n ’de (x,y) iç çarpımı
n
( x, y ) = ∑ wi xi yi
i =1
şeklinde tanımlanır.
Gerçekten ;
n
n
n
i =1
i =1
i =1
( x + y , z ) = ∑ wi ( xi + yi ) zi = ∑ wi ( xi zi + yi zi ) = ∑ wi ( xi zi ) + ∑ wi ( yi zi )
a)
= ( x, z ) + ( y , z )
n
n
n
i =1
i =1
i =1
b) ( x, y ) = ∑ wi ( xi yi ) = ∑ wi ( xi yi ) = ∑ wi ( yi xi ) = ( y, x)
n
n
i =1
i =1
c) (α x, y ) = ∑ wi (α xi ) yi = α ∑ wi xi yi =α ( x, y )
n
d) ( x, x) = ∑ wi xi xi = wi ( x1 x1 + ... + xn xn ) = wi ( x1 + ... + xn ) ≥ 0
2
2
(*)
i =1
olur.
(x,x) = 0 olsun. Bu durumda wi pozitif bir sayı olduğundan ( * ) eşitliğinde her
xi = 0 olur.Yani ;
x1 = 0, x2 = 0 , K, xn = 0 dır. O halde x = ( x1 , x2 , K , xn ) = 0 olur.
4 özellik sağlanır ve Öklid uzayının bir iç çarpım uzayı olduğu görülür.
3
2.TEMEL TANIM VE TEOREMLER
Oray OR
Örnek 2.1.3: X = C[a, b] olmak üzere eğer x = f (t ) ve y = g (t ) ise
(x, y ) iç çarpımı
b
( x, y ) = ( f , g ) = ∫ f (t ) g (t ) dt
a
şeklinde tanımlanır.
Örnek 2.1.4: X = L2 [a, b]
olmak üzere bu uzay üzerindeki iç çarpım;
b
( f , g ) = ∫ f ( x) g ( x)dx
a
şeklinde tanımlanır.
Teorem 2.1.1 ( Schwarz Eşitsizliği) :
Bir iç çarpım uzayında
( x, y )
2
≤ ( x, x ) ( y , y )
dır. Eşitlik hali ancak ve ancak x ve y lineer bağımlı ise mümkündür.
İspat : Eğer y = 0 ise (x,0) = 0 olup ispat açıktır.
λ keyfi bir kompleks sayı olsun. (1.1.1)(d) ’ den
( x + λy , x + λ y ) ≥ 0
dır. Bu ifade
( x, x) + λ ( x, y ) + λλ ( y, y ) ≥ 0
şeklinde yazılır. Bu eşitsizlik özellikle
λ=−
( x, y )
( y, y )
sayısı için doğrudur.Böylece
( x, x ) −
( x, y )( y, x) ( x, y )( y, x) ( x, y )( y, x)
−
+
( y, y ) ≥ 0
( y, y )
( y, y )
( y, y ) 2
dır.O zaman
4
2.TEMEL TANIM VE TEOREMLER
Oray OR
( x, x ) −
( x, y )( y, x)
≥0
( y, y )
olur. Buradan her iki taraf ( y, y ) ile çarpılırsa ;
( x, x)( y, y ) − ( x, y )( y, x) ≥ 0
( x, y )( y, x) ≤ ( x, x)( y, y )
olur. Şimdi (2.1.1)(b’) kullanılırsa ,
( x, y )( x, y ) ≤ ( x, x)( y, y )
2
( x, y ) ≤ ( x, x)( y, y )
bulunur. Farzedelim ki burada
2
( x, y ) = ( x, x ) ( y , y )
eşitlik hali sağlansın. Eğer y = 0 olursa eşitlik açıktır.
O halde y ≠ 0 alalım. Bu durumda
λ = − (x,y) ⁄ (y,y) olmak üzere
(x+ λy, x+ λy )= 0
olur. Böylece (2.1.1)(d) ’den
x + λy = 0 ⇒ x = −λ y ⇒ x =
( x, y )
y
( y, y )
bulunur. Sonuç olarak x = αy ise o zaman;
2
2
( x, y ) = α ( y, y ) 2 = ( x, x)( y, y )
dır.
Teorem 2.1.2: X bir iç çarpım uzay ise
x =
( x, x )
eşitliği X ’de bir norm tanımlar ve X bu norm ile bir normlu vektör uzayı olur.
5
2.TEMEL TANIM VE TEOREMLER
İspat :
niceliği norm şartlarını ;
( x, x )
i)
x ≥ 0
i)
x =0 ⇔
x=0
iii) α x = α x
iv) x + y
Oray OR
α skaler
,
≤ x + y
(Üçgen eşitsizliği)
sağlamalıdır. İlk 3 şart aşikardır.Üçgen eşitsizliğini sağladığını gösterelim.
x+ y
2
= ( x + y, x + y )
= ( x , x ) + ( x, y ) + ( y , x ) + ( y , y )
=
2
x
≤
x
≤
x
2
+ 2 R ( x, y ) + y
2
+ 2 ( x, y ) + y
2
2
+2 x
2
y + y
= ( x + y )2
dır ve böylece
x+ y
≤ x + y
olur.
Teoerem 2.1.3 (Paralelkenar Teoremi):
Bir X iç ve . Teorem2.1.2 ’deki gibi tanımlansın.Bu durumda;
x+ y
2
+ x− y
2
=2 x
2
+2 y
2
dır.
İspat:
x+ y
2
+ x− y
2
= ( x + y, x + y ) + ( x − y, x − y )
= ( x, x ) + ( x, y ) + ( y , x ) + ( y , y ) + ( x, x ) −
− ( x, y ) − ( y , x ) + ( y , y )
6
2.TEMEL TANIM VE TEOREMLER
Oray OR
2
= 2( x
= 2 x
2
+ y
+2 y
2
)
2
dir.
Bu teorem aynı zamanda X üzerindeki normun bir iç çarpım tarafından üretilip
üretilemediğini söyler.
7
2.TEMEL TANIM VE TEOREMLER
Oray OR
2.2. İç Çarpım Uzayları için Açı Geometri
Reel iç çarpım uzayındaki sıfırdan farklı iki eleman için 2.1.2 ’den
−1 ≤
( x, y )
x y
≤1
olur. Sonuç olarak
( x, y )
x y
cos θ =
değerini sağlayan tek bir θ ∈ [0, π ] değeri vardır.
Tanım 2.2.1: Reel bir iç çarpım uzayındaki x ve y elemanları arasında
kalan θ açısı
cos θ =
( x, y )
x y
, 0 ≤θ ≤π
(2.2.1)
şeklinde tanımlanır.
Kompleks iç çarpım olması durumunda bu tanım
cos θ =
( x, y )
x y
(2.2.2)
Burada özellikle iki durum dikkate değerdir.
A) θ = 0 ise; bu durumda cos θ = 1 ve buradan ⎟(x,y)⎟ = ⎟⎜x⎟⎜⎟⎜y⎟⎜ olur. Teorem
2.1.1’ e göre x ve y elemanları lineer bağımlıdır: α x = y β . Buradan da x ve y ’
nin paralel olduklarını söyleyebiliriz.
B) θ = π/2 ise ; x ve y elemanları dik (ortogonal) tir. Çünkü cos θ = 0 olup
cos θ =
( x, y )
x y
8
=0
2.TEMEL TANIM VE TEOREMLER
Oray OR
olur.Bu da gösterir ki ( x, y ) = 0 dır.
Tanım 2.2.2: x ⊥ y
( x, y ) = 0
ancak ve ancak
’ dır.
Tanıma dayalı olarak şunları söyleyebiliriz:
a) Kendisine ortogonal olan tek eleman 0’ dır.
b) x ⊥ y ⇒
y ⊥ x ’ dir.
c) y ⊥ x1 , x2 , K , xn ise a1 , K , an ∈ R olmak üzere , y ⊥ a1 x1 + a2 x2 + K + an xn
olur.
Örnek 2.2.1 (Kosinüs Teoremi): x ve y reel bir iç çarpım uzayının
elemanları olmak üzere ,
x+ y
2
=
x
2
+ y
2
+ 2 x y cos θ
dır.
Çözüm:
2
x + y = ( x + y , x + y ) = ( x, x ) + ( x, y ) + ( y , x ) + ( y , y )
= x
= x
2
2
+ 2( x, y ) + y
+2 x
2
y cos θ + y
2
olup ispat tamamlanır.
x1
x1 − λx2
λx2
x2
Şekil 2.2.1
x1 ve x2 sıfırdan farklı elemanlar olsunlar. λx2 , x1 ’ in
izdüşümü olacak şekilde λ skalerini seçelim. O zaman
9
x2 üzerine
2.TEMEL TANIM VE TEOREMLER
Oray OR
λx2 ⊥ x1 − λx2
dır.Bunun anlamı
(λx2 , x1 − λx2 ) = 0
olmasıdır. O halde
λ ( x2 , x1 ) − λ λ ( x2 , x2 ) = 0 ve λ =
( x1 , x2 )
x2
( x2 , x2 )
dır.Bunun anlamı x2 = 0 olmak üzere;
x1 ’in x2 üzerine izdüşümü =
( x1 , x2 )
x2
( x2 , x 2 )
(2.2.3)
dir. Bu eşitlik izdüşümü kısaca tanımlamamıza yardımcı olur.
x2 elemanı
x2 = ( x2 , x2 ) = 1 uzunluk değerine sahipse o zaman
x1 ’ in x2 üzerine izdüşümü = ( x1 , x2 ) x2
dir.
10
(2.2.4)
2.TEMEL TANIM VE TEOREMLER
Oray OR
2.3 Ortonormal Sistemler
Tanım 2.3.1: S , X iç çarpım uzayının elemanlarının bir kümesi
olsun.Eğer ∀x, y ∈S için
⎧0
⎪
( x, y ) = ⎨
⎪1
⎩
x≠ y
x, y ∈ S
(2.3.1)
x= y
ise , S kümesine ortonormaldir denir.
Ancak , eğer x ≠ y için ( x, y ) = 0 ise bu kümeye ortogonaldir denir.
n
Örnek 2.3.1: R
n
’ de ( x, y ) iç çarpımı
( x, y ) = ∑ xi yi
olmak üzere
i =1
(1,0,0,…,0), (0,1,0,…,0), … , (0,0,…,1)
birim vektörleri bir ortonormal küme oluştururlar.
Örnek 2.3.2: C[-π,π] veya L2 [-π,π] uzayında ( f , g ) =
1
∫ f ( x) g ( x)dx
−1
çarpımıyla birlikte
(2π )−1 2 , (π )−1 2 cos x, (π )−1 2 sin x, (π )−1 2 cos 2 x, (π )−1 2 sin 2 x, K,
fonksiyonları ortonormal bir küme oluştururlar.
1
2
Örnek 2.3.3: C[-1,1] veya L [-1,1] ’de ( f , g ) =
∫
1 − x 2 f ( x) g ( x)dx
−1
iç çarpımı ile birlikte ,
U m ( x) =
sin[(m + 1) arccos x]
1 − x2
11
, m = 0,1,. . . ,
iç
2.TEMEL TANIM VE TEOREMLER
Oray OR
fonksiyonları ortogonal bir küme oluşturur. Gerçekten ;
1
∫
−1
⎧0 , m ≠ n
⎪
1 − x 2 U m ( x) U n ( x)dx = ∫ sin( m + 1)θ sin( n + 1)θ dθ = ⎨
0
⎪π 2 , m = n
⎩
π
2
dir. O halde
π U m (x)
fonksiyonları ortogonaldir.
Teorem 2.3.1 ( Pisagor Teoremi):
Eğer x1 , x2 , K , xn ’ ler ortogonal ise o zaman
x1 + x2 + K + xn
2
2
= x1 + x2
2
+ K + xn
2
(2.3.2)
dir.
İspat : xi ’ ler ortogonal olduğundan j ≠k iken ( x j , xk ) = 0 dır. Dolayısıyla
n
2
∑ xj
j =1
n
n
n
⎛ n
⎞ n n
= ⎜⎜ ∑ xi , ∑ x j ⎟⎟ = ∑∑ ( xi , x j ) = ∑ ( x j , x j ) = ∑ x j
j =1
j =1
j =1
⎝ i=1
⎠ i=1 j =1
2
olup 2.3.2 sağlanır.
Sonuç 2.3.2 : x ⊥ y ise
x+ y
İspat : Teorem 2.3.1 ’ de ,
x+ y
2
= x
2
+ y
2
dir.
n = 2 için
2
= x
2
+ y
2
olur. Dolayısıyla ispat tamamlanmış olur.
Teorem 2.3.3: Sıfırdan farklı x1 , x2 , K , xn ortogonal elemanların kümesi
lineer bağımsızdır.
12
2.TEMEL TANIM VE TEOREMLER
Oray OR
a1 x1 + K + an xn = 0 , ai ≠ 0 olsun. Yani ai ‘lerin
İspat : Farz edelim ki
hepsi sıfır olmasın. O zaman
0 = (0, xk ) = (a1 x1 + K + an xn , xk ) = ak ( xk , xk )
olur. Bu ise xk
2
= 0 ⇒ xk = 0 olduğunu söyler. Bu ise hipotez ile çelişir.
Bu teoremin tersi önemlidir. Yani lineer bağımsız bir küme
ortonormalleştirilebilir.
Teorem 2.3.4: x1 , x2 ,K , xn ,K sonlu veya sonsuz elemnların bir dizisi öyle
ki her bir x1 , x2 ,K , xn lineer bağımsız olsun. O zaman ;
*
x1 = a11 x1
*
x2 = a21 x1 + a22 x2
*
x3 = a31 x1 + a32 x2 + a33 x3
M
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭
(2.3.3)
ve
( xi* , x *j ) = δ ij
i, j = 1,2, K
olacak şekilde
aij , 1 ≤ j ≤ i
sabitlerini bulabiliriz.
İspat: Ardışık olarak ,
13
(2.3.4)
2.TEMEL TANIM VE TEOREMLER
y1 = x1
*
*
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪⎭
*
x1 = y1 y1
ve
y2 = x2 − ( x2 , x1 ) x1
Oray OR
ve
*
x2 = y 2 y 2
M
n
yn+1 = xn+1 − ∑ ( xn+1 , xk ) xk
*
*
ve
i =1
*
xn+1 = yn+1 yn+1
(2.3.5)
kuralım. Bu yapının tekrar edilmesinden yn+1 ve böylece xn+1 ’in ,
x1 , x2 , K, xn+1
’in bir lineer kombinasyonu olduğu açıktır. Madem ki yi sıfır olamaz , o halde
yi
’de sıfır olamaz. Bu işlem yn ’i verir ve daha sonra yn ,
1
yn
ile
çarpılarak normu 1 olan bir vektör elde edilir. yn = 0 olsaydı son satır xn ’ in ,
{x , x ,K, x }
*
1
*
2
*
n
cümlesinin bir lineer kombinasyonu olduğunu gösterirdi. Dolayısıyla
xn , x1 , K , xn−1 ’in bir lineer kombinasyonu olurdu ki bu durum {x1 , x2 , K , xn } ’in
lineer bağımsız olmasıyla çelişir. xi* ’lar normaldir:
*
*
( xi , xi ) = ( yi yi , yi yi ) =
Şimdi de xn+1 (veya yn+1 ) ile
(y , x ) = 0 dır.
2
*
1
Farzedelim ki i ≤ n , j < i için ,
*
( yi , x j ) = 0 ,
olsun. O zaman j ≤ n
yi
2
( yi , yi ) = 1
xn* , xn*−1 , K , x1* ’ın ortogonal olduğunu
göstermeliyiz.
Basit bir hesapla
1
için ,
14
2.TEMEL TANIM VE TEOREMLER
Oray OR
n
( yn+1 , x j ) = ( xn+1 − ∑ ( xn+1 , xk ) xk , x j )
*
*
*
*
k =1
n
= ( xn+1 , x j ) − ∑ ( xn+1 , xk )( xk , x j )
*
*
*
k =1
*
*
= ( xn+1 , x j ) − ( xn+1 , x j )
=0
dır.
Sonuç 2.3.5 : aii başkatsayıları pozitiftir. aii = ( yii
)
−1
Sonuç 2.3.6 :
*
x1 = b11 x1
*
*
*
*
x2 = b21 x1 + b22 x2
M
*
xn = bn1 x1 + bn 2 x2 + K + bnn xn
olacak şekilde bii > 0 olmak üzere
bij
, 1≤ j ≤ i
sabitlerini bulabiliriz.
x1 =
İspat:
x2 =
1 *
x1
a11
öyle ki
b11 =
1
a11
− a21
1 *
x1 +
x2
a22
a22
=−
a21
1 *
*
x1 +
x2
a22 a11
a22
öyle ki
dır. Tümevarımla , aii > 0 için ;
15
b22 =
1
a22
dır.
2.TEMEL TANIM VE TEOREMLER
bii =
Oray OR
1
= yii > 0
aii
j = 1,2,...
dır.
*
*
*
xn ⊥ x1 , xn ⊥ x2 , K , xn ⊥ xn−1
Sonuç 2.3.7 :
*
*
İspat : xk = bk 1 x1 + bk 2 x2 + K + bkk xk
dır.
*
öyle ki k< n olmak üzere
n
⎛
⎞ n
( xn* , xk ) = ⎜ xn* , ∑ bki xi* ⎟ = ∑ bki ( xn* , xi* ) = 0
i =1
⎝
⎠ i =1
dır.
Eğer x1 , x2 , K , xn
ve
x1* , x2* , K , xn*
(2.3.3) tarafından bağlandırılmış ve
sonrakilerin ortonormal olması istenir ve akk > 0 , k= 1,2,...,n ise o zaman aij
sabitleri tek olarak belirlenirdi. Gram-Schmidt işlemi bunları belirlemek için yalnızca
bir yöntemdir.
Diğer taraftan , eğer
xk* = α k 1 x1 + α k 2 x2 + K + α kn xn ,
k = 1,2, K , n,
ise , o zaman α ij sabitlerinin seçiminde daha özgür oluruz.
Örnek 2.3.4: 1, x, x 2 , x 3 , K kuvvet fonksiyonları C[a,b] uzayında lineer
bağımsızdır. Eğer
a0 + a1 x + a2 x 2 + K + an x n ≡ 0 ,
ise o zaman ai = 0 , i = 1,2, K , n
a≤ x≤b
dır.
w(x) , [a,b] üzerinde tanımlanmış pozitif integrallenebilir bir fonksiyon olmak
üzere , C[a, b] ’de ağırlıklı iç çarpım
16
2.TEMEL TANIM VE TEOREMLER
Oray OR
b
( f , g ) = ∫ w( x) f ( x) g ( x)dx
a
şeklinde tanımlanır.
Kuvvet fonksiyonlarının bu iç çarpım ile ortonormalleştirilmesi ile
Pn ( x) = k n x n + K
n =0,1,2,. . . ve kn> 0
,
ortonormal polinomların kümesi elde edilir.
b
∫ w( x) P ( x) P ( x) dx = δ
*
m
*
n
mn
,
m,n = 0,1, . . .
a
Örnek 2.3.5: a = −1, b = 1 ve w( x) = 1 olmak üzere Legendre
polinomları teorem 2.3.3’teki yöntem ile hesplanır.
x1 = 1, x2 = x , x3 = x 2
olsun.
y1 = x1 = 1 olur. Buradan;
12
y1
⎛ +1 ⎞
= ⎜⎜ ∫ dx ⎟⎟
⎝ −1 ⎠
= 2
olur
ve
y2 = x2* − ( x2 , x1* ) x1* = x − ( x,
x1* =
1
y1
=
y1
2
1 1
)
2 2
Burada
( x,
1
1
)=
2
2
+1
∫ x.dx = 0
−1
olur. Buradan;
12
y2 = x
Böylece x2* =
3
x
2
ve böylece
y2
⎞
⎛ +1
= ⎜⎜ ∫ x 2 dx ⎟⎟
⎠
⎝ −1
olur.
y3 = x 2 −
17
1
3
=
2
3
olur.
2.TEMEL TANIM VE TEOREMLER
12
2
⎛ +1⎛
⎞
1⎞
y3 = ⎜ ∫ ⎜ x 2 − ⎟ dx ⎟
⎜ ⎝
⎟
3⎠
⎝ −1
⎠
Oray OR
⎛2⎞
= ⎜ ⎟ 10
⎝ 15 ⎠
*
x3 =
ve
3
1⎞
⎛
10 ⎜ x 2 − ⎟
4
3⎠
⎝
olur.
Örnek 2.3.6: a = −1 , b = 1 ve w( x) = (1 − x 2 ) −1 2 alarak
T0 ( x), T1 ( x), K , 1. tür Chebyschev polinomlarını hesaplayalım.
x0 = 1 , x1 = x , x2 = x 2 , x3 = x 3 , K
olsun.
y0
y0
*
y 0 = x0 = 1 ,
x0 =
olur.
y0 = [( y0 , y0 )]
12
⎛ 1 1 .1
⎞
= ⎜⎜ ∫
dx ⎟⎟
2
⎝ −1 1 − x
⎠
1
2
= π
ve
1
*
x0 =
π
= π −1 2 T0 ( x)
*
dır. Şimdi de x1 ’ı bulalım.
(
*
)
y1 = x1 − x1 , x0 x0
= x −π
−1
1
∫
−1
*
x.1
1 − x2
dx
Bu son kısımdaki integrale I dersek;
1
I=∫
−1
x
1 − x2
dx = 0
olur.
Burada x = sin t
, dx = cos tdt dönüşümü yapılmıştır ve π 2 ve − π 2 sınırları
elde edilmiştir. Dolayısıyla buradan ;
18
2.TEMEL TANIM VE TEOREMLER
Oray OR
y1 = x − 0 = x
elde edilir.
⎞
⎛1 x.x
y1 = ( y1 , y1 ) = ( x, x) = ⎜⎜ ∫
dx ⎟⎟
2
⎠
⎝ −1 1 − x
1
2
⎞
⎛ 1 x2
dx ⎟⎟
= ⎜⎜ ∫
2
⎠
⎝ −1 1 − x
1
2
12
⎛π ⎞
=⎜ ⎟
⎝2⎠
olur. Burada yine ;
x = sin t , dx = cos tdt
ve sin t = −1 ⇒ t = − π 2 , sin t = 1 ⇒ t = π 2 dönüşümleri
yapılmıştır.
Buradan;
( )
y
x
x = 1 =
= π
12
2
y1
⎛π ⎞
⎜ ⎟
⎝2⎠
*
1
−1 2
⎛π ⎞
x= ⎜ ⎟
⎝2⎠
−1 2
T1 ( x)
elde edilir.
*
*
*
y2 = x2 − ( x2 , x1 ) x1 − ( x2 , x0 ) x0
⎛π ⎞
= x −⎜ ⎟
⎝2⎠
2
−1
*
1
⎞
⎞
⎛ 1 x2 x
x2.1
−1 ⎛
⎟
⎜
⎟
⎜∫
(
)
π
dx
x
dx
−
⎟
⎜∫
⎟
⎜
2
2
⎠
⎝ −1 1 − x
⎠
⎝ −1 1 − x
Bu eşitlikteki ilk integrale I1 ve ikinci integrale I 2 dersek ;
I2 =
π
2
(daha önce gösterildi)
1
I1 =
∫
−1
bulunur. Çünkü burada ,
x3
1 − x2
x2 x
1 − x2
dx = 0
tek fonksiyondur. Buradan;
19
2.TEMEL TANIM VE TEOREMLER
Oray OR
−1
bulunur. Şimdi,
⎛π ⎞
⎛π ⎞
y2 = x 2 − ⎜ ⎟ .0 x − (π ) −1 ⎜ ⎟
⎝2⎠
⎝2⎠
1
= x2 −
2
1
y2 = ∫
−1
(x
2
−1 2
)
2
1 − x2
12
1 ⎛π ⎞
dx = ⎜ ⎟
2⎝ 2⎠
Böylece;
1
−1 2
−1 2
x2 −
y
2 = ⎛⎜ π ⎞⎟ 2 x 2 − 1 = ⎛⎜ π ⎞⎟ T ( x)
x2* = 2 =
2
12
y2
⎝2⎠
⎝2⎠
1 ⎛π ⎞
⎜ ⎟
2⎝ 2⎠
(
elde edilir.
20
)
2.TEMEL TANIM VE TEOREMLER
Oray OR
2.4 Fourier (Ortogonal) Açılımları
Tanım 2.4.1 : x1* , x2* , K ,
ortonormal elemanların sonlu veya sonsuz bir
dizisi olsun. y keyfi seçilmiş bir eleman olmak üzere
∑ (y, x ) x
∞
*
n
n =1
*
n
ifadesine y için bir Fourier serisi denir. (Eğer dizi sonlu ise sonlu toplam kullanılır.)
(
)
Burada ; y, xn* sabitleri y ’ nin Fourier katsayıları olarak adlandırılır.y
elemanının Fourier serisi
∞
(
)
y ~ ∑ y, xn* xn*
(2.4.1)
n =1
şeklinde gösterilir.
(2.2.4) göz önünde bulundurularak (2.4.1) ;
∞
y ~ ∑ ( y ’ nin xn* üzerine izdüşümü)
(2.4.2)
n =1
şeklinde yorumlanabilir ve böylece bir elemanın Fourier serisi yalnız ortonormal
elemanların bir sistemi üzerindeki elemanların izdüşümlerinin toplamıdır.
Eğer x1 , x2 , K , ≠ 0 ortogonal ise o zaman ,
xk* =
xk
xk
k = 1,2, K ,
(2.4.3)
şeklinde seçilebilir öyle ki (2.4.1)
∞ ⎛
x
y ~ ∑ ⎜⎜ y , k
xk
n =1 ⎝
∞
⎞ xk
( y , xk ) x
⎟
=
∑
k
⎟ x
k =1 ( xk , xk )
⎠ k
olur.
Yeniden , (2.2.3) ’ ten
21
(2.4.4)
2.TEMEL TANIM VE TEOREMLER
Oray OR
∞
y ~ ∑ ( y ’ nin xn üzerine izdüşümü )
(2.4.5)
n =1
anlamı çıkarılabilir.
3
Örnek 2.4.1 : R 3 ’ te ( x, y ) iç çarpımı ( x, y ) = ∑ xi yi olmak üzere ,
i =1
x1* = (1,0,0) ,
x2* = (0,1,0) ,
x3* = (0,0,1)
seçelim. Bir y = (a, b, c) ∈ R 3 için ;
( y, x1* ) = a , ( y, x2* ) = b , ( y, x3* ) = c
olduğundan ;
(a, b, c) = a(1,0,0) + b(0,1,0) + c(0,0,1)
toplamı y ’ nin Fourier açılımıdır.
Örnek 2.4.2 : C[−π , π ] veya L2 [−π , π ] uzaylarını ,
π
( f , g) =
∫ f ( x) g ( x)dx
iç çarpımıyla ele alalım.
−π
Ortonormal sistem : (2π ) −1 2 , (π ) −1 2 sin x , (π ) −1 2 cos x , (π ) −1 2 sin 2 x , K
ak =
1
π
π
∫ f ( x) cos kx dx
bk =
ve
−π
f ( x) ~
1
π
π
∫ f ( x) sin kx dx
olmak üzere;
−π
a0 ∞
+ ∑ ak cos kx + bk sin kx
2 k =1
(2.4.6)
dır. Buna Fourier Serisi denir.
1
Örnek 2.4.3 : C[−1,1] uzayında,
( f , g) = ∫
f ( x) g ( x) dx
−1
1− x2
Ortonormal sistem:
(π )
−1 2
⎛π ⎞
T0 ( x) , ⎜ ⎟
⎝2⎠
−1 2
⎛π ⎞
T1 ( x) , ⎜ ⎟
⎝2⎠
olmak üzere ;
22
−1 2
T2 ( x) , K ,
olsun.
2.TEMEL TANIM VE TEOREMLER
f ( x) ~
Oray OR
a0 ∞
+ ∑ ak Tk ( x)
2 k =1
ak =
,
2
π
+1
∫
−1
f ( x)Tk ( x) dx
1 − x2
(2.4.7)
dır. Buna Chebyschev-Fourier serisi adı verilir.
Sonlu boyutlu uzaylar olması durumunda, bir eleman ile onun Fourier açılımı
çakışıktır. Bunun için aşağıdaki teorem verilebilir.
Teorem 2.4.1 : x1 , x2 , K , xn lineer bağımsız ve xi* ’ lar xi ’lerin
ortonormalleştirilmişleri olsun. Eğer w = a1 x1 + K + an xn ise , o zaman ,
n
(
)
w = ∑ w, xk* xk*
(2.4.8)
k =1
dır.
İspat : Sonuç 2.3.6 ’ ten ,
w = a1 (b11 x1* ) + a2 (b21 x1* + b22 x2* ) + K + an (bn1 x1* + K + bnn xn* )
n
= c1 x1* + c2 x2* + K + cn xn* = ∑ ck xk*
k =1
yazabiliriz. Şimdi , 1 ≤ k ≤ n için ;
( w, xk* ) = (c1 x1* + K + cn xn* , xk* )
= c1 ( x1* , xk* ) + K + ck ( xk* , xk* ) + K + cn ( xn* , xk* )
= ck
olur. Buradan ;
n
n
w = ( w, x1* ) x1* + K + ( w, xn* ) xn* = ∑ (w, xk* ) xk* = ∑ ck xk*
k =1
(2.4.8) elde edilmiş olur.
23
2.TEMEL TANIM VE TEOREMLER
Oray OR
2.5 Fourier Açılımlarının Minimum Özellikleri
Fourier açılımları aşağıdaki minimum özelliğine sahiptir.
Teorem 2.5.1 : Bir X iç çarpım uzayında , x1* , x2* , K ortonormal bir sistem
ve y keyfi seçilmiş olsun. O zaman a1 , a2 , K , a N sabitlerinin her seçimi için ;
N
N
i =1
i =1
y − ∑ ( y, xi* ) xi* ≤ y − ∑ ai xi*
(2.5.1)
dır.
İspat:
N
y − ∑a x
i =1
*
i i
2
N
N
⎞
⎛
= ⎜ y − ∑ ai xi* , y −∑ ai xi* ⎟
i =1
i =1
⎠
⎝
(
N
)
N
(
)
(
N
= ( y, y ) − ∑ ai xi* , y − ∑ ai y, xi* + ∑ ai a j xi* , x *j
i =1
i =1
(
*
i
)
+ ∑ xi* , y y, xi* − ∑ xi* , y y, xi*
)
N
)
i , j =1
(
N
N
= ( y , y ) − ∑ ai x , y − ∑ ai y , x + ∑ ai
i =1
N
(
)(
*
i
i =1
)
N
i =1
(
)(
i =1
i =1
N
(
= ( y, y ) − ∑ y, x
*
i
i =1
2
) + ∑ a − (y, x )
N
i =1
i
*
i
2
dır. Son ifadenin ilk iki terimi a ’ lardan bağımsız olduğu için ;
N
y − ∑ ai xi*
i =1
24
2
2
)
2.TEMEL TANIM VE TEOREMLER
Oray OR
ifadesinin yalnız ve yalnız
(
)
ai = y, xi* , i = 1,2, K , N
(2.5.2)
olduğu zaman, yani a ’ lar y ’ nin katsayıları olduğu zaman, minimum değerinin
elde edileceği açıktır. Bir başka deyişle , bir iç çarpım uzayının sonlu boyutlu bir alt
uzayında, y ’ ye en yakın lineer kombinasyon, y için Fourier serisinin n. kısmi
toplamıdır.
Nümerik analizin en küçük kare problemi, uygun bir iç çarpım uzayında, ,
N
min y − ∑ ai xi
ai
’ nin terimlerini bulmak ile formüle edilebilir. Bir sonraki sonuç
i =1
bu tür problemlerin çözümünü verir.
Sonuç 2.5.2 : x1 , x2 , K , x N bir iç çarpım uzayında lineer bağımsız
N
elemanların bir kümesi olsun. y − ∑ ai xi ’e minimize edilmiş x1 , x2 , K , x N ‘nin
i =1
lineer kombinasyonunu bulma problemi ,
∑ ( y, x ) x
N
*
i
i =1
*
i
tarafından çözülür.
xi* ’ lar , x ’ lerin ortonormalleştirilmişleridir ve yukarıdaki problemin
çözümü tektir. Bu bize her en küçük kare probleminin , uygun bir Fourier serisi
tarafından çözüldüğünü söyler.
N
Sonuç 2.5.3 : min y − ∑ a x
ai
i =1
*
i i
2
= y
2
N
−∑
i =1
25
( y, x )
*
i
2
dır.
2.TEMEL TANIM VE TEOREMLER
Oray OR
(
)
İspat : Teorem 2.5.1 ’ in son eşitliğinde ai = y, xi* yazalım . Böylece
ifade etmiş olduğumuz eşitlik elde edilir.
Sonuç 2.5.4 ( Bessel Eşitsizliği ) : Eğer xi* ’ lar ortonormal ise , o zaman,
∑ (y, x )
N
i =1
*
i
2
≤ y
2
(2.5.3)
dır.
İspat : Sonuç 2.5.3 ’den ;
N
N
(
0 ≤ min y − ∑ ai xi* = y − ∑ y, xi*
ai
2
i =1
)
2
i =1
dır ve ispat aşikardır..
Sonuç 2.5.5 : Eğer xi* ’ lar ortonormal elemanların sonsuz bir dizisi ise, o
zaman ,
∑ ( y, x ) ≤
∞
i =1
*
i
y
2
(2.5.4)
dır.
İspat : Sonuç 2.5.4 ’ ten sonlu ortonormal elemanlar için Bessel
eşitsizliğinden her N > 0 için ;
∑ (y, x )
∞
*
i
i =1
26
2
2.TEMEL TANIM VE TEOREMLER
Oray OR
serinin kısmi toplamlar dizisi sınırlıdır ve dolayısıyla yakınsaktır. Böylece (2.5.3)
eşitsizliğinin her iki tarafının n → ∞ için limiti alınırsa (2.5.4) elde edilir.
Sonuç 2.5.6 : Eğer xi* ’ lar ortonormal elemanların sonsuz bir dizisi ise, o
zaman ,
(
)
lim y, xi* = 0
i →∞
(2.5.5)
dır. Yani, y ’nin Fourier katsayıları sıfıra yaklaşır.
İspat : (2.5.4) eşitsizliğinin solundaki ifade yakınsak olup genel terimi
(
n → ∞ için sıfıra yakınsar. Böylece lim y, xi*
i →∞
)
2
(
)
= 0 olur. Buradan lim y, xi* = 0
i →∞
olur.
Sonuç 2.5.7 ( Ortogonal Elemanların Minimum Özelliği ) : x1 , x2 , K , xn
lineer bağımsız olsun. x1* , x2* , K , xn* , xk ’ ların Teorem 2.3.3 ’ teki tasarıya göre
ortonormalleştirilmişleri olsun. O zaman, a1 , a2 , K , an−1 sabitlerinin tüm seçimleri
için ;
yn
xn*
=
ann
≤
a1 x1 + a2 x2 + K + an−1 xn−1 + xn
dır.
İspat :
a1 x1 + a2 x2 + K + an−1 xn−1 + xn = xn − (− a1 x1 − a2 x2 − K − an−1 xn−1 )
= xn − (b1 x1 + b2 x2 + K + bn−1 xn−1 )
yazılabilir. Sonuç 2.5.2 ’ den ;
min xn − (b1 x1 + K + bn−1 xn−1 )
bi
27
2.TEMEL TANIM VE TEOREMLER
Oray OR
probleminin çözümü
∑ (x , x ) x
n −1
*
k
n
k =1
*
k
dır. (2.5.1) ’ den ise ;
n −1
(
)
n −1
xn − ∑ xn , xk* xk*
≤ xn − ∑ bk xk* =
k =1
k =1
n −1
∑a x
k
k =1
*
k
+ xn
olur. (2.3.6) ’ dan ;
n −1
(
)
yn = xn − ∑ xn , xk* xk*
∑ (x , x ) x
n −1
⇒
k =1
k =1
*
k
n
*
k
= xn − y n
olduğundan ;
xn − ( xn − y n )
≤
yn
≤
n −1
∑a x
k =1
k
n −1
∑a x
k =1
k
*
k
+ xn
*
k
+ xn
olur. Sonuç 2.3.4 ve (2.3.6) ’ dan ;
x *i =
yi
yi
aii =
ve
olup,
yi =
xi*
aii
dır. Böylece ispat tamamlanmış olur.
28
1
yi
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3. EN KÜÇÜK KARELER YAKLAŞIMI
3.1. En Küçük Kareler Yaklaşımı
Bir y elemanının en küçük kareler yaklaşımı ( yani bir iç çarpım uzayındaki
y ’ye en yakın elemanın bulunması problemi ) verilen lineer bağımsız
x1 , x2 , K , xn elemanlarının bir kombinasyonu tarafından birkaç yoldan ifade
edilebilir :
(1) Verilen elemanların a1 x1 + a2 x2 + K + an xn şeklindeki bir lineer kombinasyon
olarak ,
(2) x ’ lerin ortonormalleştirilmişlerinin b1 x1* + b2 x2* + K + bn xn* şeklindeki lineer
kombinasyonu olarak.
Örnek 3.1.1 : Eğer f ∈ C[−π , π ] , o zaman,
π
lim
n→∞
∫
π
f ( x) sin nx dx = lim
n→∞
−π
∫ f ( x) cos nx dx = 0
−π
dır. Bu Riemann teoremidir ve Sonuç 2.5.5 ’ in bir sonucudur.
Çözüm :
Bu uzaylarda Bessel eşitsizliği ,
an =
bn =
1
π
1
π
π
∫π f ( x) cos nx dx
, n = 0,1,2, K ,
−
π
∫π f ( x) sin nx dx
, n = 1,2, K ,
−
olmak üzere ,
(
)
a0 ∞ 2
+ ∑ an + bn2 ≤ f
2 n=1
29
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
dır. (2.5.5) ’den
(
)
⇒ lim an2 = 0
lim an2 + bn2 = 0
n→∞
ve
n→∞
lim bn2 = 0
n→∞
olur ve böylece çözüm tamamlanır.
Örnek 3.1.2 : Pn* ( x) ’ ler Legendre polinomları olsunlar. Eğer f ∈C[−1,1]
ise , o zaman ,
1
lim ∫ f ( x) Pn* ( x) dx = 0
n→∞
−1
dır.
Çözüm : Legendre polinomları C [−1,1] ’ de 1, x , x 2 , K
şeklindeki
lineer bağımsız elemanların ortonormalleştirilmişleridirler. Yani , C [−1,1] ’ de bir
ortonormal sistem belirtirler. O halde Sonuç 2.5.6 ’ dan ;
1
∫ f ( x) P ( x) dx
*
n
lim
n→∞
= 0
−1
dır.
Örnek 3.1.3 : Eğer f ∈ L2 [a, b] ise ,
2
n
⎛
⎞
min ∫ ⎜ f ( x) − ∑ ai x i ⎟ dx
ai
i =0
⎠
a ⎝
b
problemi tek çözüme sahiptir.
Çözüm : Sonuç 2.5.3 ’ te y = f (x) ve xi = x i alınırsa ;
2
N
min y − ∑ ai x
ai
i =0
i
2
N
⎛
⎞
= min ∫ ⎜ f ( x) − ∑ ai x i ⎟ dx
ai
i =1
⎠
a⎝
b
= f
2
N
(
− ∑ f ( x), xi*
2
)
i =0
dır. Sağ taraf pozitif ve sabittir. Ve xi* ortonormal elemanları Gram-Schmidt
yöntemiyle tek olarak belirlendiğinden bu tek çözüme sahiptir.
30
3.EN KÜÇÜK KARELER YAKLAŞIMI
1
(
Oray OR
Örnek 3.1.4 : min ∫ e − a0 − a1 x − a2 x
ai
x
2
)
2
dx problemini çözelim.
−1
Çözüm : Burada y = e x olarak alıyoruz. Yani ;
ai
∑ (y, x ) x
N
N
min y − ∑ ai xi
probleminin çözümü
i =1
*
i
i =1
*
i
olduğundan ;
2
1
2
⎛
⎞
min ∫ ⎜ e x − ∑ ai x i ⎟ dx
ai
i =0
⎠
−1 ⎝
probleminin çözümü
∑ ( e , x )x
2
x
i =0
*
i
*
i
olur. Daha önceki bilgilerimizden 1, x, x 2 , K polinomlar sisteminin
ortonormaleştirilmesiyle ( a = 1 , b = −1 , w( x) = 1 olmak üzere ) Legendre
polinomları elde edileceğinden xi* ’ lar yerine Legendre polinomlarını
kullanabiliriz.Yani;
x1* =
1
2
,
3
x ,
2
x2* =
x3* =
3
1⎞
⎛
10 ⎜ x 2 − ⎟
4
3⎠
⎝
polinomlarını kullanalım.
e x ’ in Fourier katsayıları ;
1
b0 =
∫e
−1
1
b1 =
∫
−1
x
(
1
1
dx =
e − e −1
2
2
3 x
x e dx =
2
31
)
3
(2 e −1 )
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
1
b2 =
∫
−1
b1
Oray OR
3
1⎞
3 10 ⎛ 2e 14e −1 ⎞
⎛
⎜ −
⎟
10 ⎜ x 2 − ⎟ e x dx =
4
3⎠
4 ⎜⎝ 3
3 ⎟⎠
⎝
ve b2 değerleri hesaplanırken kısmi integrasyon yöntemi kullanılmıştır.
Böylece ;
P( x) = b1 x1* + b2 x2* + b3 x3*
=
1
90 ⎛ 2e − 14e −1 ⎞ ⎛ 2 1 ⎞
⎟⎟ ⎜ x − ⎟
e − e −1 + 3 e −1 x + ⎜⎜
2
16 ⎝
3
3⎠
⎠⎝
=
15
33
3
e − 7e −1 x 2 + 3 e −1 x + e −1 − e
4
4
4
(
)
(
)
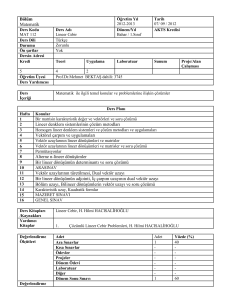
≈ 0,537 x 2 + 1,104 x + 0,996
_.08
e x − p (x)
-1
+1
|
|
_ -.08
Şekil 3.1.1 e x ’e Parabolle En Küçük Kare Yaklaşımındaki Hata
32
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Örnek 3.1.5 : Tn ( x) = 2 n−1 x n + K
Chebyschev polinomları olsun. O
zaman , a ’ ların tüm seçimleri için ;
1
2 2 n −2
(Tn ( x) )2 dx =
1
∫
1 − x2
−1
π
(x
1
2 2 n−1
∫
≤
n
+ a1 x n−1 + K + an
1 − x2
−1
) dx
2
(3.1.2)
dır. Burada n ≥ 1 ’dir.
1
Çözüm : ( f , g ) =
∫
f ( x) g ( x)dx
iç çarpımını ele alalım.
1 − x2
−1
(π )−1 2 T0 ,
⎛π ⎞
⎜ ⎟
⎝2⎠
−1 2
T1
⎛π ⎞
, ⎜ ⎟
⎝2⎠
−1 2
T2
,K,
ortonormal sistem olmak üzere ;
−1 2
⎛ ⎛ π ⎞ −1 2
⎞
⎜ ⎜ ⎟ Tn , ⎛⎜ π ⎞⎟ Tn ⎟ = 1
⎜⎝ 2 ⎠
⎟
⎝2⎠
⎝
⎠
−1
⎛π ⎞
⎜ ⎟ (Tn , Tn ) = 1
⎝2⎠
(Tn , Tn ) = π
2
olur. Dolayısıyla
1
2
2 n −2
1
∫
(Tn ( x) )2 dx =
−1
1− x
2
1
2
2 n−2
(Tn , Tn ) =
2
1
π
2 n−2
2
=
π
2 2 n−1
elde edilir. Bir önceki örnekteki gibi Sonuç 2.5.7 ’den (3.1.2) sağlanır.
Örnek 3.1.6 : Eğer
a0 ∞
+ ∑ ak Tk ( x) sürekli bir f (x) fonksiyonunun
2 k =1
33
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Chebyschev - Fourier serileri ise, o zaman,
2
+1
n
⎛
⎞
min ∫ ⎜ f ( x) − ∑ bk x k ⎟ 1 − x 2
bi
k =0
⎠
−1 ⎝
(
−1 2
)
dx
minimum bulma problemini
n
a0
+ ∑ ak Tk ( x)
2 k =1
kısmi toplamı çözer. Ancak bu kısmi toplam
n
min max f ( x) − ∑ bk x k
bi
−1≤ x≤1
k =0
probleminin çözümüne çok yakındır. Bunun için ;
f ( x) =
a0
+ a1T1 ( x) + K + anTn ( x) + an+1Tn+1 ( x)
2
artı ihmal ettiğimiz bir artan yazdığımızı varsayalım. O zaman ;
⎛a
⎞
f ( x) − ⎜ 0 + a1T1 ( x) + K + anTn ( x) ⎟ = an+1Tn+1 ( x)
⎝ 2
⎠
dır. an+1Tn+1 ( x) , sıralı bir dizide alterne olarak n + 2 tane eş maxima ve minima ’
ya sahip olduğundan ( DAVIS,P.J., ‘Interpolation and Approximation’, Dover
Publication, Inc.,New York (1975) ) Teorem 7.6.4 bize , parantez içinin Pn ’ den
f (x) ’e en iyi düzgün yaklaşım olduğunu söyler. Bunun için kısmi Chebyschev –
Fourier serileri, bazen en iyi düzgün yaklaşımları tanımlamaktaki başlangıç noktası
olarak kullanılır.
34
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Eğer f bir polinom ise , onun Chebyschev- Fourier açılımları kuvvetlerin
, Chebyschev polinomlarının kombinasyonları olarak bulunabilir.
Örnek 3.1.7 : [−1, 1] aralığı üzerinde f ( x) = 1 +
x x 2 x3 x 4 x5
+
+
+
+
2 3
4
5
6
fonksiyonu için izin verilen hata payı ε = 0.05 dir. Gerçekten ;
1
1 1
1 1
1 1
f ( x) = T0 + T1 + ⋅ (T0 + T1 ) + ⋅ (3T1 + T3 ) + ⋅ (3T0 + 4T2 + T4 )
2
3 2
4 4
5 8
1 1
+ ⋅ (10T1 + 5T3 + T5 )
6 16
=
149
76
32
11
3
1
T0 + T1 +
T2 + T3 +
T4 + T5
20
90
120
96
120
96
dır.
Tn ( x)
=
cos (n arc cos x ) ≤ 1
olduğundan son iki terimi silebiliriz ve en fazla
3
1
−
< 0.05
120 96
hatasını yakalarız. Böylece
149
76
32
11
T0 + T1 +
T2 + T3
20
96
120
96
P3 ’ dedir ve [−1, 1] üzerinde f (x) ’ e 0.05 ’den daha az bir hata ile yaklaşır.
35
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3.2 Normal Denklemler
Teorem 3.2.1 : Bir X iç çarpım uzayında x1 , x2 , K , xn lineer bağımsız
elemanlar ve x1* , x2* , K , xn* ortonormal sistem olsun. O zaman , her y ∈ X elemanı
için ;
n
⎛
y
(y, xk* ) xk* ⎞⎟ ⊥ x*j
−
⎜
∑
k =1
⎠
⎝
dır.
İspat :
n
n
⎛
*
*
*⎞
*
(
)
(
)
(y, xk* )(xk* , x*j )
−
,
,
=
,
−
y
y
x
x
x
y
x
⎜
∑
∑
k
k
j⎟
j
k =1
k =1
⎝
⎠
= ( y, x*j ) − ( y, x*j )
=0
olup ispat tamamlanır.
Sonuç 3.2.2 : y ile onun , x1 , x2 , K , xn ’ler tarafından oluşturulan lineer
kombinasyonların en iyi yaklaşığının farkı her x j ’e ortogonaldir.
36
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
y - en iyi
y
yaklaşım
x1
en iyi yakl.
x2
Şekil 3.2.1
Geometrik dilde , a1 x1 + a2 x2 + K + an xn şeklindeki tüm mümkün olan
lineer kombinasyonların kümesinin bir lineer manifold olduğunu söyleriz. Bir lineer
manifold orjinden geçen bir düzlem kavramının genelleştirilmişidir. Ve bu sonuç
sabit bir elemandan, bir lineer manifoldun bir noktasına en kısa uzaklığın , manifolda
dik bir elemanının uzunluğu olduğunu ifade eder.
Teorem 3.2.3 : a1 x1 + a2 x2 + K + an xn , x1 , x2 , K , xn (lineer bağımsız
olduğu farzedilsin) lineer kombinasyonlarının içinden , y ’ ye en iyi yaklaşım
olsun. O zaman ai katsayıları aşağıdaki eşitlik sisteminin çözümleridir.
a1 ( x1 , x1 ) + a2 ( x2 , x1 ) + K + an ( xn , x1 ) = ( y, x1 )
.
.
.
an ( x1 , xn ) + a2 ( x2 , xn ) + K + an ( xn , xn ) = ( y, xn )
Bu eşitlikler normal denklemler olarak bilinirler.
37
⎫
⎪
⎪
⎪⎪
⎬
⎪
⎪
⎪
⎪⎭
(3.21)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
İspat : Sonuç 3.2.2 ’den
n
⎛
⎞
⎜ y − ∑ ak xk , x j ⎟ = 0
k =1
⎝
⎠
dır. Bu ifade açıldığında ;
(y, x ) − a (x , x ) − K − a (x , x ) = 0
j
1
1
j
n
n
j
(y, x ) = a (x , x ) + K + a (x , x )
j
1
1
j
n
elde edilir. Bu ise (2.6.1) sisteminin j. eşitliğidir.
38
n
j
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3.3 Gram Matrisi ve Determinantı
Tanım 3.3.1 : x1 , x2 , K , xn , bir iç çarpım uzayında verilen elemanların bir
dizisi olsun. n x n matrisi
⎡ ( x1 , x1 ) ( x1 , x2 ) K ( x1 , xn ) ⎤
⎢ .
. ⎥⎥
⎢
G = ( (xi , x j ) ) = ⎢ .
. ⎥
⎥
⎢
. ⎥
⎢ .
⎢⎣( xn , x1 ) ( xn , x2 ) K ( xn , xn )⎥⎦
(3.3.1)
x1 , x2 , K , xn ’ lerin Gram matrisi olarak bilinir. Determinantı ;
g = g ( x1 , K , xn ) = (xi , x j ) = (x j , xi )
(3.3.2)
elemanların Gram determinantı olarak bilinir.
Gram matris , normal eşitliklerin katsayıları matrisinin transpozudur. Bu aynı
zamanda
(a1 x1 + a2 x2 + K + an xn , b1 x1 + b2 x2 + K + bn xn ) = ∑ ai b j (xi , x j )
n
i , j =1
bilineer formun matrisidir. Burada gerçekten ;
⎡ a1 ⎤
⎢.⎥
⎢ ⎥
X = a1 x1 + K + an xn ⇔ X = ⎢ . ⎥
⎢ ⎥
⎢.⎥
⎢⎣an ⎥⎦
39
(3.3.3)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
⎡ b1 ⎤
⎢.⎥
⎢ ⎥
Y = b1 y1 + K + bn yn ⇔ Y = ⎢ . ⎥
⎢ ⎥
⎢.⎥
⎢⎣bn ⎥⎦
ve
⎡ ( x1 , x1 ) K ( x1 , xn ) ⎤
⎢
⎥
⎥
⎢
⎥ = ( (xi , x j ) )n x n
A=⎢
⎢
⎥
⎢
⎥
⎢⎣( xn , x1 ) K ( xn , xn )⎥⎦
olmak üzere K n üzerinde bilineer formu f : K n x K n şeklinde bir fonksiyon olup ;
f ( X , Y ) = (a1 x1 + K + an xn , b1 x1 + K + bn xn )
= X T . A.Y
⎡ b1 ⎤
⎢.⎥
⎢ ⎥
= (a1 , a2 ,K, an ). A . ⎢ . ⎥
⎢ ⎥
⎢.⎥
⎢⎣bn ⎥⎦
= ∑ ai b j (xi , x j )
n
i , j =1
(3.3.3) elde edilir. Buradaki bilineer formun A matrisi Gram matristir.
Burada g ( x1 , x2 , K , xn ) argümentlerinin simetrik fonksiyonudur. Bunun için
, g (x1 , x2 , K , xi , K , x j , K , xn ) ’i düşünelim ve xi ve x j ’nin yer değiştirdiğini
varsayalım. Yani , g (x1 , K , x j , K , xi , K , xn ) olsun. Bu , son ifadenin determinant
açılımında i. ve j. sütunlar yer değiştirdiğini , ilk ifade için ise i. ve j. satırların
yer değiştirdiğini gösterir.
40
3.EN KÜÇÜK KARELER YAKLAŞIMI
n
Lemma 3.3.1 : yi = ∑ aij x j
j =1
Oray OR
, i = 1,2, K , n olsun. A , (aij ) matrisini
~
göstersin ve A , onun konjuge transpozu
( a ) olsun. O zaman ;
ji
~
G ( y1 , y2 , K , yn ) = A G (x1 , x2 , K , xn ) A
(3.3.4)
g ( y1 , y2 , K , yn ) = det A
(3.3.5)
ve
2
g ( x1 , x2 , K , xn )
dır.
İspat :
y1 = a11 x1 + a12 x2 + K + a1n xn
y2 = a21 x1 + a22 x2 + K + a2 n xn
M
yn = an1 x1 + an 2 x2 + K + ann xn
olmak üzere,
⎡ ( x1 , y1 ) ( x1 , y 2 ) K ( x1 , y n ) ⎤ ⎡ ( x1 , a11 x1 + K + a1n xn ) K
⎢ .
. ⎥ ⎢
.
⎢
⎥ ⎢
. ⎥=⎢
.
⎢ .
⎢ .
⎥
⎢
.
.
⎢( x , y ) ( x , y ) K ( x , y ) ⎥ ⎢( x , a x + K + a x ) K
n
2
n
n ⎦
1n n
⎣ n 1
⎣ n 11 1
⎡ ( x1 , x1 ) ( x1 , x2 ) K ( x1 , xn ) ⎤
⎢ .
. ⎥
⎢
⎥
. ⎥
=⎢ .
⎢ .
. ⎥
⎢( x , x ) ( x , x ) K ( x , x ) ⎥
n
2
n
n ⎦
⎣ n 1
~
= G ( x1 , x 2 , K , xn ) A
dır. Hatta ;
41
( x1 , an1 x1 + K + ann xn ) ⎤
⎥
.
⎥
.
⎥
⎥
.
( xn , an1 x1 + K + ann xn )⎥⎦
⎡ a11
⎢ .
⎢
⎢ .
⎢ .
⎢
⎢⎣a1n
a21 K an1 ⎤
. ⎥
⎥
. ⎥
. ⎥
⎥
a2 n K ann ⎥⎦
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
⎡ a11 a12 K a1n ⎤ ⎡ ( x1 , y1 ) ( x1 , y2 ) K ( x1 , yn ) ⎤
⎢ .
. ⎥⎢ .
. ⎥
⎥⎢
⎥
~ ⎢
. ⎥⎢ .
. ⎥
A. G. A = ⎢ .
⎢ .
. ⎥⎢ .
. ⎥
⎢a
⎥
⎢
⎥
⎣ n1 an 2 K ann ⎦ ⎣( xn , y1 ) ( xn , y2 ) K ( xn , yn )⎦
⎡ a11 ( x1 , y1 ) + K + a1n ( xn , y1 ) K a11 ( x1 , yn ) + K + a1n ( xn , yn ) ⎤
⎢
⎥
.
.
⎢
⎥
=⎢
.
.
⎥
⎢
⎥
.
.
⎢a ( x , y ) + K + a ( x , y ) K a ( x , y ) + K + a ( x , y )⎥
1
nn
n
n1 1
n
nn
n
n ⎦
⎣ n1 1 1
⎡ (a11 x1 + a12 x2 + K + a1n xn , y1 ) K (a11 x1 + a12 x2 + K + a1n xn , yn ) ⎤
⎢
⎥
.
.
⎢
⎥
=⎢
.
.
⎥
⎢
⎥
.
.
⎢( a x + a x + K + a x , y ) K ( a x + a x + K + a x , y ) ⎥
nn n
n
n1 1
n2 2
nn n
n ⎦
⎣ n1 1 n 2 2
⎡ ( y1 , y1 ) K ( y1 , yn ) ⎤
⎢ .
. ⎥
⎢
⎥
=⎢ .
. ⎥
⎢ .
. ⎥
⎢( y , y ) K ( y , y ) ⎥
n
n ⎦
⎣ n 1
= G ( y1 , y2 , K , yn )
dir.
Bu iki eşitliği birleştirerek lemmanın ilk özdeşliğini elde ederiz. İkinci kısım
~
determinant almaktan gelir ve burada A = A dır.
Özel durum olarak;
g (σ 1 x1 , σ 2 x2 , K , σ n xn ) = σ 1 σ 2 K σ n g (x1 , x2 , K , xn )
2
2
dır.
42
2
(3.3.6)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Teorem 3.3.2 : x1 , x2 , K , xn ≠ 0 olsun. O zaman ;
0 ≤ g ( x1 , x2 , K , xn ) ≤ x1
i)
2
x2
2
K xn
2
(3.3.7)
dır.
ii)
Alt sınır g = 0 hali ancak ve ancak xi ’ler lineer bağımlı ise meydana
gelir. Üst sınır ancak ve ancak bu elemanlar ortogonal ise meydana gelir.
Eğer elemanlar normalleştirilmişler ise , yani xi = 1 ise, o zaman ,
0 ≤ g ≤ 1
(3.3.8)
dır.
İspat : i) Farzedelim ki x ’ler lineer bağımlı olsun. O zaman
a1 x1 + a2 x2 + K + an xn = 0 iken hepsi sıfır olmayan a1 , a2 , K , an sabitlerini
bulabiliriz. Farzedelim ki a j ≠ 0 olsun ve
y1 = x1
⎫
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎬ (3.3.9)
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎭
.
.
.
y j −1 =
x j −1
y j = a1 x1 + a2 x2 + K + an xn = 0
y j +1 =
x j +1
.
.
.
yn =
xn
dönüşümlerini düşünelim.
(y , y ) = (0, y ) = 0
j
i
i
olduğundan ,
g ( y1 , y2 , K , yn ) = 0
43
olur. Şimdi ;
3.EN KÜÇÜK KARELER YAKLAŞIMI
1
.
Oray OR
0
K
0
K
0
.
.
.
.
0
.
determinantı
1
K
0
K
.
0
.
.
A = .
.
a1
.
.
a2 K a j K a n
.
.
.
.
0
.
1
0
K
0
K
j. satırın minörüne göre açılırsa
A = 0 + 0 + K + a j .1 + 0 + K + 0 = a j ≠ 0
olur. Lemma 3.3.1 ’den ;
g ( x1 , x2 , K , xn ) = 0
olur. Çünkü ;
g ( y1 , y2 , K , yn ) = det A g ( x1 , x2 , K , xn )
1
424
3
2
≠0
dır.
Şimdi de x ’lerin lineer bağımsız olduğunu düşünelim. O zaman Teorem
2.3.3 ’ den ;
xk* = ak1 x1 + ak 2 x2 + K + akk xk
, akk > 0
olacak şekilde ortonormal olan aij sabitlerini bulabiliriz. Lemmamızdan ;
(
)
1 = δ ij = g x1* , x2* , K , xn* = g ( x1 , x2 , K , xn ) A
olup , burada
44
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
0 K
a22 K
a11
a21
.
A =
.
.
an1
0
0
.
= a11a22 K ann
.
.
K ann
an 2
dır. Böylece ,
g ( x1 , x2 , K , xn ) =
1
A
2
1 1
1
L 2 > 0
2
2
a11 a22
ann
=
(3.3.10)
dır. Böylece x ’ler ancak lineer bağımlı olduğu zaman g = 0 olur.
Bundan sonraki adımda
1
akk2
≤
xk
2
(3.3.11)
olduğunu göstereceğiz.
(2.3.5) ’dan ;
1
=
akk2
yk
2
k −1
(
)
= xk − ∑ xk , x x
j =1
*
j
2
*
j
≤
xk
2
dır. Çünkü teorem (2.5.1) ’den ve ai = 0 olmasından , yani ,
ai = ( y, xi* ) = ( xk , xi* ) = 0 , i = 1, K , k − 1
olmasından ;
k −1
xk − ∑ ai xi ≤ xk
i =1
dır.
ii) (⇒ ) Eğer xi ’ler ortogonal ise , o zaman G , köşegeni xi
diğer her taraf sıfır olan bir matris olur. Yani ;
45
2
olan ve
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
⎡ ( x1 , x1 ) ( x1 , x2 ) K ( x1 , xn ) ⎤ ⎡
⎢( x , x ) ( x , x ) K ( x , x ) ⎥ ⎢
⎢
n ⎥
2
2
2
⎢ 2 1
.
.
⎥=⎢
G = ⎢⎢
⎢
.
. ⎥ ⎢
⎢
⎥
. ⎥ ⎢
⎢ .
⎢⎣( xn , x1 ) ( xn , x2 ) K ( xn , xn )⎥⎦ ⎢
⎢⎣
2
x1
0
0
.
x2
2
K
K
.
.
0
0
K
0 ⎤
⎥
0 ⎥
⎥
⎥
⎥
⎥
2 ⎥
xn ⎥⎦
olur. Bu taktirde ;
g ( x1 , x2 , K , xn ) = x1
2
2
x2
K xn
2
olur. Böylece elemanların ortogonal olma halinde üst sınırda eşitlik vardır.
(⇐) Varsayalım ki ,
g ( x1 , x2 , K , xn ) = x1
2
x2
2
K xn
2
olsun. (3.3.10) ’dan ;
g ( x1 , x2 , K , xn ) =
1 1
1
L 2
2
2
a11 a22
ann
dır. Şimdi de ,
1
≤
akk2
xk
2
olduğundan ;
yk
2
=
1
akk2
=
xk
olur. Ancak (2.3.5) ’dan ve Sonuç 2.5.3 ’ten ;
46
2
, k = 1,2, K , n
3.EN KÜÇÜK KARELER YAKLAŞIMI
2
yk
Oray OR
k −1
(
)
x k − ∑ xk , x x
=
*
j
j =1
2
*
j
k −1
= min xk − ∑ ai xi
ai
=
olur. Böylece ,
yk
2
2
= xk
k
i =1
i =1
2
k −1
(
− ∑ xk , xi*
)
2
i =1
olduğundan ;
∑ (x , x )
k −1
xk
2
*
i
2
= 0 ,
k = 1,2, K , n
dır. Bu ise x1 , x2 , K , x n vektörlerinin ortogonalliğini gösterir.
Sonuç 3.3.3 (Hadamard ’ın Determinant Eşitsizliği) : D = ( aij
)
kompleks
elemanlı n x n tipinde bir matris olsun. O zaman ,
D
2
≤
∏(a
n
2
k1
2
+ ak 2
k =1
+ K + akn
2
)
(3.3.12)
dır.
Eğer aij elemanları aij ≤ M , i, j = 1,2, K , n şartını sağlarsa o zaman ,
D ≤ M n nn 2
(3.3.13)
olur.
İspat : xi ,
(ai1 , ai 2 , K, ain )
vektörünü belirtsin. Cn ’de
(x , x ) = ∑ a
n
i
j
k =1
ik
a jk
~
Hermitian iç çarpımını kullanalım. Eğer D = a ji , D ’nin konjuge transpozunu
belirtirse o zaman,
47
3.EN KÜÇÜK KARELER YAKLAŞIMI
a11 a12 K a1n
a21 a 22 K a2 n
.
.
~
DD =
.
.
.
.
an1 an 2 K ann
D
2
Oray OR
a11
a12
.
.
.
a1n
a21 K an1
a22 K ann
.
.
.
a2 n K ann
a11 a11 + K + a1n a1n K a11 an1 + K + a1n ann
.
.
=
.
.
.
.
an1 a11 + K + ann an1 K an1 an1 + K + ann ann
( x1 , x1 ) ( x1 , x2 ) K ( x1 , xn )
.
.
=
.
.
.
.
( xn , x1 ) ( xn , x2 ) K ( xn , xn )
= (xi , x j )
=
g ( x1 , x2 , K, xn ) ≤
x1
2
x2
dır. Şimdi
xi
dır. Ve
~
D = D
2
n
n
k =1
k =1
= ( xi , xi ) = ∑ aik aik = ∑ aik
~
olduğundan D D = D
olur. Böylece ,
48
2
2
2
K xn
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
D
2
≤
≤
x1
∑
2
x2
n
k =1
≤
2
a1k
2
2
n
∑ a2k K ∑ ank
2
k =1
∏( a
n
n
2
k =1
2
2
)
2
2
)
2
+ a2 k + K + ank
2
+ ak 2 + K + akn
1k
∏( a
K xn
n
k =1
≤
Oray OR
k1
k =1
(*)
olur. Böylece (3.3.12) elde edilir.
Eğer aij ≤ M ise o zaman ;
2
aij
≤M2
dır. Buradan ;
2
ak 1 ≤ M 2
2
ak 2 ≤ M 2
.
.
.
2
a kn ≤ M 2
eşitsizlikleri taraf tarafa toplanırsa ,
2
2
2
ak 1 + ak 2 + K + akn ≤ n M 2
elde edilir. Şimdi her iki tarafın n. kuvveti alınırsa ;
(a
2
k1
2
+ ak 2 + K + akn
2
)
n
≤ n n M 2n
olur. ( * ) ’dan ;
2
(
2
2
D ≤ ak1 + ak 2 + K + akn
2
)
n
olduğundan ,
49
n
(
= ∏ ak 1 + ak 2 + K + akn
k =1
2
2
2
)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
2
D ≤ nn M 2n
olur. Buradan ,
D ≤ M n nn 2
dır.
Teorem 3.3.4 : Bir iç çarpım uzayında , x1 , x2 , K , xn lineer bağımsız olsun.
Eğer
δ = min y − (a1 x1 + a2 x2 + K + an xn )
ai
(3.3.14)
ise, o zaman ,
δ2 =
g ( x1 , x2 , K , xn , y )
g ( x1 , x2 , K , xn )
(3.3.15)
dır.
İspat : Minimize edilmiş a1 x1 + K + an xn elemanı s olsun. O zaman ,
δ2 = y−s
2
= ( y − s , y − s ) = ( y − s , y ) − ( y − s, s )
olup (3.2.1) ’den ( y − s, s ) = 0 ’dır. Buradan ;
δ 2 = ( y − s, y ) = ( y, y ) − (s, y )
ve
(s, y ) = ( y, y ) − δ 2
(3.3.16)
olur. Normal denklemleri aşağıdaki formda yazar ve (3.3.16) ’nın açılmış halini
bunlara eklersek ,
50
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
a1 ( x1 , x1 ) + a2 ( x2 , x1 ) + K + an ( xn , x1 ) − ( y, x1 ) = 0
.
.
.
a1 ( xn , x1 ) + a2 ( xn , x2 ) + K + an ( xn , xn ) − ( y, xn ) = 0
[
]
a1 ( x1 , y ) + a2 ( x2 , y ) + K + an ( xn , y ) + δ 2 − ( y, y ) = 0
⎫
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎭
(3.3.17)
elde edilir. Böylece bu sistem a1 , a2 , K , an , an+1 (= 1) gibi biri belli n+1 bilinmeyen,
n+1 denklemden oluşan homojen denklem sistemi olur. (a1 , K , an , an+1 ) n+1 ’lisi
(0,0, K ,0) ’dan farklı aşikar olmayan bir çözüme sahip olduğundan katsayılar
determinantı sıfır olmak zorundadır. (Aksi taktirde katsayıların hepsi sıfır olurdu.)
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) 0 − ( y, x1 )
.
.
=0
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) 0 − ( y, xn )
( x1 , y ) ( x2 , y ) K ( xn , y ) δ 2 − ( y, y )
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) 0
( x1 , x1 ) K ( xn , x1 ) − ( y, x1 )
.
.
.
.
.
.
.
.
+
=0
.
.
.
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) 0
( x1 , xn ) K ( xn , xn ) − ( y, xn )
2
( x1 , y ) ( x2 , y ) K ( xn , y ) δ
( x1 , y ) K ( xn , y ) − ( y, y )
51
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
( x1 , x1 ) K ( xn , x1 ) 0
( x1 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
.
.
.
.
.
.
+ (− 1)
=0
.
.
.
.
( x1 , xn ) K ( xn , xn ) 0
( x1 , xn ) K ( xn , xn ) ( y, xn )
2
( x1 , y ) K ( xn , y ) δ
( x1 , y ) K ( xn , y ) ( y, y )
Buradan ;
( x1 , x1 ) K ( xn , x1 ) 0
( x1 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
.
.
.
.
.
.
=
.
.
.
.
( x1 , xn ) K ( xn , xn ) 0
( x1 , xn ) K ( xn , xn ) ( y, xn )
2
( x1 , y ) K ( xn , y ) δ
( x1 , y ) K ( xn , y ) ( y, y )
ve dolayısıyla ;
δ 2 g (x1 , x2 , K , xn ) = g (x1 , x2 , K , xn , y )
δ2 =
g ( x1 , x2 , K , xn , y )
g ( x1 , x2 , K , xn )
elde edilir.
Teorem 3.3.5 : Bir iç çarpım uzayında , x1 , x2 , K , xn lineer bağımsız olsun.
min y − (a1 x1 + K + an xn )
ai
probleminin çözümü s ,
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
.
.
s=−
÷ g ( x1 , x2 , K , xn )
.
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) ( y, xn )
x1
x2
K
xn
y
52
(3.3.18)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
dır. y − s hatası ,
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
.
.
y−s=−
÷ g ( x1 , x2 , K , xn )
.
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) ( y, xn )
x1
x2
K
xn
y
(3.3.19)
ile verilir.
İspat : (3.2.1) normal denklemlerden ve Cramer Kuralı ’ndan, yani ; a1 için
⎡ ( x1 , x1 ) ⎤
⎢( x , x ) ⎥
⎢ 1 2 ⎥
⎢ . ⎥
⎢ . ⎥
⎢
⎥
⎢ . ⎥
⎢⎣( x1 , xn )⎥⎦
sütunu yerine
⎡ ( y, x1 ) ⎤
⎢( y , x ) ⎥
2 ⎥
⎢
.
⎢
⎥
⎢ . ⎥ yazılarak ;
⎥
⎢
⎢ . ⎥
⎢⎣( y, xn )⎥⎦
( y, x1 ) ( x2 , x1 ) K ( xn , x1 )
( y , x2 ) ( x2 , x2 ) K ( xn , x2 )
.
.
a1 =
÷ g ( x1 , x2 ,K, xn )
.
.
.
.
( y , xn ) ( x2 , xn ) K ( xn , xn )
( x1 , x1 ) ( y, x1 ) K ( xn , x1 )
( x1 , x2 ) ( y, x2 ) K ( xn , x2 )
.
.
a2 =
÷ g ( x1 , x2 , K , xn )
.
.
.
.
( x1 , xn ) ( y, xn ) K ( xn , xn )
53
(3.3.20)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
.
.
.
( x1 , x1 ) ( x2 , x1 ) K ( y, x1 )
( x1 , x2 ) ( x2 , x2 ) K ( y, x2 )
.
.
an =
÷ g ( x1 , x2 , K , xn )
.
.
.
.
( x1 , xn ) ( x2 , xn ) K ( y, xn )
olur. Eğer (3.3.18) determinantını son satırın minörüne göre açarsak ;
( x1 , x1 ) K ( xn , x1 )
.
s=−
.
.
( x1 , xn ) K ( xn , xn ) ( y, xn )
x1
K
xn
( x2 , x1 ) K ( xn , x1 )
.
x1
=
( y, x1 )
.
÷ g ( x1 , x2 , K , xn )
0
( y, x1 )
.
( x1 , x1 ) K
.
.
.
.
( x2 , x n ) K ( x n , xn ) ( y , x n )
g ( x1 , x2 ,K , xn )
xn
+ K +
= a1 x1 + a2 x2 + K + an xn
elde edilir.
54
( xn−1 , x1 )
.
( y, x1 )
.
.
.
.
( x1 , xn ) K ( xn−1 , xn−1 ) ( y, xn )
g ( x1 , x2 ,K , xn )
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) 0
.
.
.
.
y=
÷ g ( x1 , x2 , K , xn )
.
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) 0
x1
x2
K
xn
y
(3.3.21)
yazılabilir. Çünkü ; (3.3.21) n. sütuna göre açılırsa ;
y . g ( x1 , x2 , K , xn ) ÷ g ( x1 , x2 , K , xn ) = y
olur. Şimdi (3.3.21) ’e , (3.3.18) eklenerek ;
( x1 , x1 ) K ( xn , x1 ) 0
( x1 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
.
.
.
.
.
.
+
.
.
.
.
( x1 , xn ) K ( xn , xn ) ( y, xn )
( x1 , xn ) K ( xn , xn ) 0
0
x1
xn
y
x1
xn
K
K
y + (− s ) =
g ( x1 , x2 , K, xn )
( x1 , x1 ) ( x2 , x1 ) K ( xn , x1 ) ( y, x1 )
.
.
=
÷ g ( x1 , x2 , K, xn )
.
( x1 , xn ) ( x2 , xn ) K ( xn , xn ) ( y, xn )
x1
x2
xn
y
K
(3.3.19) elde edilir.
Sonuç 3.3.6 : x1 , x2 , K, lineer bağımsız ve x1* , x2* , K ’lar , x1 , x2 , K ’lerin
Gram-Schmidt ’e göre ortonormalleştirilmişleri olsunlar. O zaman ;
55
3.EN KÜÇÜK KARELER YAKLAŞIMI
xn* =
Oray OR
( x1 , x1 )
( x2 , x1 ) K ( xn , x1 )
.
.
.
.
.
.
( x1 , xn−1 ) ( x2 , xn−1 ) K ( xn , xn−1 )
x1
x2
K
xn
1
g (x1 , K, xn−1 ) g ( x1 , K, xn )
(3.3.22)
n >1 ,
x1
g ( x1 )
x1* =
dir.
xn* ’daki ann başkatsayısı
ann =
g ( x1 , K , xn−1 )
g ( x1 , K , xn )
n >1
,
(3.3.23)
şeklinde verilir.
min xn − (a1 x1 + K + an−1 xn−1 )
İspat :
ai
minimum problemini düşünelim. Sonuç 2.5.7 ’ye uygun olarak bu minimum
probleminin çözümü ;
xn*
= xn − (a1 x1 + K + an−1 xn−1 ) , ann > 0
ann
(3.3.24)
şeklinde verilir. Yani , a1 x1 + K + an−1 xn−1 kombinasyonu
∑ (x , x ) x
n −1
k =1
n
*
k
*
k
ifadesine eşit olduğu zaman , bu kombinasyon xn ’ye bir en iyi yaklaşıktır. (2.3.6) ’ya
göre ,
n −1
(
)
yn = xn − ∑ xn , xk* xk*
ve
k =1
56
yn =
xn*
ann
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
olur. Buradan ;
∑ (x , x ) x
n −1
k =1
n
*
k
*
k
= xn − y n = xn −
a1 x1 + K + an−1 xn−1 = xn −
xn*
ann
xn*
ann
(3.3.24) yazılabilir. (3.3.19) ’a göre ,
( x1 , x1 ) K ( xn−1 , x1 )
( xn , x1 )
.
.
xn − (a1 x1 + K + an−1 xn−1 ) =
÷ g ( x1 , K , xn−1 )
.
( x1 , xn−1 ) K ( xn−1 , xn−1 ) ( xn , xn−1 )
x1
xn−1
xn
K
(3.3.25)
dır. Sonuç 2.3.5 ’ten ;
yn =
1
ann
olup , (3.3.24) ’ün her iki tarafın normu ve minimumu alınır ve Sonuç 2.5.7’den ;
xn*
1
=
= min xn − (a1 x1 + K + an xn )
ai
ann
ann
elde edilir. Teorem 3.3.4 ’ten ;
δ2 =
g ( x1 ,K , xn , y )
g ( x1 ,K , xn )
olduğundan ,
bu minimum =
olur. Buradan
57
g ( x1 , K , xn )
g ( x1 , K , xn−1 )
3.EN KÜÇÜK KARELER YAKLAŞIMI
1
=
ann
g ( x1 , K , xn )
g ( x1 , K , xn−1 )
Oray OR
⇒
ann =
g ( x1 , K , xn−1 )
g ( x1 , K , xn )
olur ve böylece (3.3.23) elde edilir. Dolayısıyla ,
( x1 , x1 ) K ( xn−1 , x1 )
( xn , x1 )
.
*
.
xn
=
÷ g ( x1 , K , xn )
.
ann
( x1 , xn−1 ) K ( xn−1 , xn−1 ) ( xn , xn−1 )
x1
xn−1
xn
K
olur. Burada ann yerine yazılır ve gerekli düzenleme yapılırsa ,
xn* =
1
g (x1 , K , xn−1 ) g ( x1 , K , xn )
( x1 , x1 )
( x2 , x1 ) K ( xn , x1 )
.
.
.
.
.
.
( x1 , xn−1 ) ( x2 , xn−1 ) K ( xn , xn−1 )
x1
x2
K
xn
(3.3.22) elde edilir.
Örnek 3.3.1 : x1 = 1 , x2 = x , x3 = x 2 , K olmak üzere , Legendre polinomları
Sonuç 3.3.6 ’dan da elde edilebilir.
P0* ( x) =
x1
=
g ( x1 )
1
1
1
=
=
g (1)
(1,1)
2
58
3.EN KÜÇÜK KARELER YAKLAŞIMI
P1* ( x) =
=
=
Oray OR
( x1 , x1 ) ( x2 , x1 )
1
x1
x2
g ( x1 ) g ( x1 , x2 )
(1,1) ( x,1)
1
( x , x ) ( x1 , x2 ) 1
x
2 1 1
( x2 , x1 ) ( x2 , x2 )
3
x
2
( x1 , x1 ) ( x2 , x1 ) ( x3 , x1 )
1
( x1 , x2 ) ( x2 , x2 ) ( x3 , x2 )
g ( x1 , x2 ) g ( x1 , x2 , x3 )
x1
x2
x3
P2* ( x) =
1
=
4 32
3 135
=
2 0 23
0 23 0
1 x
x2
1⎞
3
⎛
10 ⎜ x 2 − ⎟
4
3⎠
⎝
M
şeklinde devam edilerek Legendre polinomları elde edilir.
59
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3.4 Gram Determinantın Özellikleri
Teorem 3.4.1 : Gram determinantı g ( x1 , x2 , K , xn ) aşağıdaki özelliklere
sahiptir.
(a)
(b)
(c )
(d )
( e)
g , arg ümentlerinin simetrik fonksiyonudur.
g (x1 , K, σx j , K, xn ) = σ g (x1 , x2 , K, xn )
2
g (x1 , K, x j + σxk , K, xn ) = g ( x1 , x2 , K, xn ) ,
j≠k
″
′
″
′
g 1 2 ⎛⎜ x1 + x1 , x2 , K, xn ⎞⎟ ≤ g 1 2 ⎛⎜ x1 , x2 , K, xn ⎞⎟ + g 1 2 ⎛⎜ x1 , x2 , K, xn ⎞⎟
⎝
⎠
⎝
⎠
⎝
⎠
g ( x1 , K, xn ) ≤ g (x1 , K, x p ) g (x p+1 , K, xn ) , 1 ≤ p < n
⎫
⎪
⎪
⎪
⎪
⎬ (3.4.1)
⎪
⎪
⎪
⎪
⎭
(e) ’deki eşitlik hali ancak ve ancak
(x , x ) = 0
i
j
, 1≤ i ≤ p ,
p +1 ≤ j ≤ n
olması durumunda sağlanır.
İspat : (a) ve (b) durumları daha önce gösterildi.
(c) ( 3.4.1)(c ) şıkkında verilen eşitsizliğin sol tarafındaki determinanta (1) , sağ
tarafındaki determinanta (2) diyelim.
( x1 , x1 ) K ( x1 , xk ) K ( x1 , x j ) K ( x1 , xn )
M
(1) g (x1 , K , xk , K , x j , K , xn ) =
M
( xk , x1 ) K ( xk , xk ) K ( xk , x j ) K ( xk , xn )
M
M
( x j , x1 ) K ( x j , xk ) K ( x j , x j ) K ( x j , xn )
M
M
( xn , x1 ) K ( xn , xk ) K ( xn , x j ) K ( xn , xn )
60
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
(2)
( x1 , x1 )
K
( x1 , x j + σxk )
K
( x1 , xn )
M
M
g (x1 ,K , xk ,K , x j + σxk ,K , xn ) = ( x j + σxk , x1 ) K ( x j + σxk , x j + σxk ) K ( x j +σxk , xn )
M
M
( xn , x1 )
K
( xn , x j + σxk )
K
( xn , xn )
Önce j. sütun elemanları , örneğin ;
( xi , x j + σxk ) = ( xi , x j ) + σ ( xi , xk )
olduğundan , (2) aşağıdaki gibi yazılabilir.
( x1 , x1 ) K ( x1 , xk ) K
M
( xk , x1 ) K ( xk , xk ) K
M
( x j , x1 ) K ( x j , xk )
M
( xn , x1 ) K ( xn , xk ) K
( x1 , x j + σxk )
K ( x1 , xn )
( xk , x j + σ x k )
K ( xk , x n )
( x j + σ xk , x j + σ x k ) K ( x j , xn )
( xn , x j + σxk )
K ( xn , xn )
dır. j. satır elemanları da ,
( x j + σxk , xi ) = ( x j , xi ) + σ ( xk , xi )
olmak üzere , yukarıda j. sütun için yapılanlar j. satır için yapılırsa ve sağ taraf
yeniden yazılırsa (1) determinantı elde edilir. Böylece (c) sağlanmış olur.
(d) Burada x2 , x3 , K , xn ’in lineer bağımsız olduğunu varsayabiliriz. Aksi taktirde
(3.4.1)(d) ’nin elemanları sıfır olur ve hem de eşitsizlik aşikar olur. Şimdi ,
x2 , x3 , K , xn ’leri ortonormalleştirelim ve x2* , x3* , K , xn* ortonormal vektörleri adını
verelim. O zaman Teorem 2.5.1 ve (3.3.15) ’den ,
n
δ = min x1′ + x1″ − (a2 x2 + K + an xn ) = x1′ + x1″ − ∑ ⎛⎜ x1′ + x1″ , xi* ⎞⎟ xi*
ai
i =1
61
⎝
⎠
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
ve
′
″
g ⎛⎜ x1 , K , xn , x1 + x1 ⎞⎟
⎠
δ2 = ⎝
g ( x2 , K , xn )
⇒
′
″
g 1 2 ⎛⎜ x1 + x1 , x2 , K , xn ⎞⎟
⎠
⎝
δ=
g 1 2 ( x2 , K , xn )
olur. Dolayısıyla buradan ;
′
″
g 1 2 ⎛⎜ x1 + x1 , x2 , K , xn ⎞⎟
⎝
⎠ = min x ′ + x ″ − (a x + K + a x )
n n
1
1
2 2
12
ai
g ( x 2 , K , xn )
′
″ n
′
″
= x1 + x1 − ∑ ⎛⎜ x1 + x1 , xk* ⎞⎟ xk*
⎠
k =2 ⎝
n
′
″ n
′
″
= x1 + x1 − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk* − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk*
⎝
⎠
⎝
⎠
k =2
k =2
″ n
″
′ n
′
= x1 − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk* + x1 − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk*
⎠
⎠
k =2 ⎝
k =2 ⎝
′ n
′
′ n
″
≤ x1 − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk* + x1 − ∑ ⎛⎜ x1 , xk* ⎞⎟ xk*
⎠
⎠
k =2 ⎝
k =2 ⎝
′
″
g 1 2 ⎛⎜ x1 , x2 , K, xn ⎞⎟ g 1 2 ⎛⎜ x1 , x2 , K , xn ⎞⎟
⎝
⎠+
⎝
⎠
≤
g 1 2 ( x2 , K , xn )
g 1 2 ( x 2 , K , xn )
olur. Buradan ;
′
″
′
″
g 1 2 ⎛⎜ x1 + x1 , x2 , K , xn ⎞⎟ ≤ g 1 2 ⎛⎜ x1 , x2 , K , xn ⎞⎟ + g 1 2 ⎛⎜ x1 , x2 , K , xn ⎞⎟
⎠
⎝
⎝
⎠
⎝
⎠
elde edilir ve böylece (d) sağlanır.
(e) k
, 1 ≤ k < p şartını sağlasın. O zaman sol tarafta daha fazla terim
olduğundan ,
62
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
min xk − (ak +1 xk +1 + K + a p x p + an xn )
a1
2
≤ min xk − (bk +1 xk +1 + K + b p x p )
2
bj
olur. Benzer şekilde ,
min x p − (c p+1 x p+1 + K + cn xn )
cj
2
≤ xp
2
olur. Teorem 2.7.4 ’ten ,
g ( xk , xk +1 , K , xn ) g (xk , xk +1 , K , x p )
≤
g ( xk +1 , K , xn )
g (xk +1 , K , x p )
ve
g (x p , x p+1 , K , xn )
g (x p +1 , K , xn )
≤ g (x p )
k = 1 , k = 2 , K , k = p −1
olur. Özellikle (2.8.2) ’de
g ( x1 , K , xn ) g (x1 , K , x p )
≤
g ( x2 , K , xn ) g (x2 , K , x p )
g ( x2 , K , xn ) g (x2 , K , x p )
≤
g ( x3 , K , xn ) g (x3 , K , x p )
.
.
.
g (x p , K , xn )
g (x p +1 , K , xn )
≤ g (x p )
elde edilir. Bu eşitsizlikleri taraf tarafa çarparsak ;
g ( x1 , K , xn )
≤ g (x1 , K , x p )
g (x p +1 , K , xn )
63
(3.4.2)
(3.4.3)
için ;
⎫
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎭
(3.4.4)
3.EN KÜÇÜK KARELER YAKLAŞIMI
veya
Oray OR
g ( x1 , K , xn ) ≤ g (x1 , K , x p ) g (x p+1 , K , xn )
(3.4.5)
elde edilir. Şimdi ;
(3.4.5) ’deki eşitlik hali sağlanabilir ⇔ (3.4.4) ’deki her bir bağıntı
sağlanmalıdır. Yani , ancak ve ancak
min x p − (c p +1 x p +1 + K + cn xn )
2
cj
= xp
2
(3.4.6)
ve
min xk − (ak +1 xk +1 + K + an xn ) = min xk − (bk +1 xk +1 + K + b p x p )
aj
bj
2
, k = 1,2, K , p − 1
(3.4.7)
olmalıdır. Sonuç 2.5.3 ’ten
N
min y − ∑ ai xi
ai
2
N
(
= y − ∑ y, xi*
2
i =1
)
2
i =1
ifadesi ancak ai = ( y, xi* ) ise sağlanırdı. Dolayısıyla , (3.4.6) ancak ve ancak
(xp , x j ) = 0 ,
j = p + 1, K , n
ise sağlanır. Çünkü ; Teorem 2.5.3 ’ten;
min x p − (c p+1 x p+1 + K + cn xn )
cj
dır. Şimdi de k = p − 1 için (3.4.7)
64
2
= xp
2
−
∑ (x
n
j = p +1
*
p, xj
)
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
min x p−1 − (a p x p + K + an xn )
2
aj
(
n
x p−1 − ∑ x p−1 , xi*
2
)
2
i= p
∑ (x
n
i= p
(x
p −1
p −1
, xi*
)
)
+ x p−1 , x*p
, x*p
∑ (x
n
i = p +1
p −1
2
, xi*
)
2
2
= min x p−1 − b p x p
bp
(
2
= x p−1 − x p −1 , x*p
(
2
)
2
= x p−1 , x*p
)
(
+ K + x p−1 , xn* = x p−1 , x*p
)
2
2
(
) (
)
2
=0
olur. Buradan ;
(x
p −1
, xi*
)
2
=0 ⇒
(x
p −1
)
(x
, xi* = 0 ⇒
p −1
)
, xi* = 0 ,
j = p + 1, p + 2, K , n
olur. Böylece ;
x p −1 ⊥ x p+1 , x p + 2 , K , xn
olur. k = p − 2, p − 3, K ,1 alınarak benzer sonuçla elde edilir ve ortogonallik
durumları sağlanır.
Gram determinantı çok dikkat çekici bir geometrik yoruma sahiptir. R n ’de
xi = (xi1 , xi 2 , K , xin ) şeklinde n vektör verilsin. Bu vektörler , hacmi
V = V ( x1 , x2 , K , xn ) tarafından belirlenmiş olan belirli n boyutlu bir paralelyüzün
köşeleridir. V ,
x11
x21
.
V=
.
.
xn1
x12 K x1n
x22 K x2 n
.
.
.
xn 2 K xnn
determinantının açık değeri
şeklinde gösterilebilir.
65
(3.4.8)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
x3
x2
x1
Şekil 3.4.1 R 3 ’te paralelyüz
(3.4.8) ’deki determinantı transpozu ile çarparsak ;
( x1 , x1 ) ( x1 , x2 ) K ( x1 , xn )
.
.
= g ( x1 , K , xn )
V2 =
.
.
.
.
( xn , x1 ) ( xn , x2 ) K ( xn , xn )
(3.4.9)
determinantını elde ederiz. Böylece ,
V ( x1 , K , xn ) = g ( x1 , K , xn )
olur.
66
(3.4.10)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3.5 Kapalılık ve Sonuçları
Tanım 3.5.1 : X normlu bir vektör uzayı ve X ’de elemanların sonlu veya
sonsuz bir sistemi x1 , x2 , K , olsun. Her x ∈ X elemanına xi ’lerin sonlu lineer
kombinasyonu ile keyfi olacak şekilde yaklaşabiliyorsa bu sonlu veya sonsuz sisteme
kapalıdır denir. Yani, x ∈ X ve ε > 0 için ;
x − (a1 x1 + a2 x2 + K + an xn ) ≤ ε
(3.5.1)
olacak şekilde a1 , a2 , K , an sabitlerini bulabiliriz.
Örnek 3.5.1 : R n veya C n ’de n bağımsız vektörün her kümesi kapalıdır.
xi ’ler lineer bağımsız olduğundan ;
g ( x1 , x2 , K , xn ) > 0
dır. Eğer
xi = (xi1 , xi 2 , K , xin )
ise , o zaman ,
g ( x1 , K , xn ) =
dır ve buradan
xij ≠ 0
x11 K x1n
.
.
x11 K xn1
.
.
.
.
.
.
xn1 K xnn
.
.
.
.
x1n K xnn
dır. Verilen her y ,
y = a1 x1 + a2 x2 + K + an xn
sistemi ai ’ler için çözülmüştür.
67
> 0
3.EN KÜÇÜK KARELER YAKLAŞIMI
Örnek 3.5.2 : X = C[a, b] ,
Oray OR
f = max f ( x)
a ≤ x ≤b
normu ile tanımlanmış
olsun. 1, x, x 2 , K , sistemi C[a, b] ’de kapalıdır.
Çözüm : f sürekli olduğundan , Weierstrass Teoreminden ( Teorem 6.1.1
DAVIS,P.J., ‘Interpolation and Approximation’, Dover Publication, Inc.,New York
(1975) ) ∀ ε > 0 için
f ( x) − Pn ( x) = max f ( x) − Pn ( x) ≤ ε
a ≤ x ≤b
olacak şekilde
Pn ( x) = a0 + a1 x + K + an x n vardır. Dolayısıyla
{1, x, x ,K, x ,K }
2
n
kapalıdır.
b
Örnek 3.5.3 : X = L[a, b] ,
f = ∫ f ( x) dx
normuyla tanımlanmış
a
olsun. 1, x, x 2 , K , sistemi X ’de kapalıdır.
Lp [a, b] ( mutlak değeri p. dereceden integrallenebilir fonksiyonlar uzayı )
bir vektör uzayı olmak üzere , (DAVIS,P.J., ‘Interpolation and Approximation’,
Dover Publication, Inc.,New York (1975) ) Teorem 1.4.0 (e) yani ;
Eğer p ≥ 1 olmak üzere f ∈ Lp [a, b] , p ≥ 1 , ise , o zaman , her ε > 0 için
b
∫
f ( x) − g ( x) dx ≤
a
ε
2
olacak şekilde sürekli bir g (x) fonksiyonu bulabiliriz.
g sürekli olduğundan , ∀
ε
2(b − a)
için ∃ p polinomu öyle ki ∀ a ≤ x ≤ b
için
68
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
g ( x) − p ( x) ≤
ε
2(b − a)
dir. Son ifadede her iki tarafın integrali alınırsa ,
b
∫
a
ε
b
g ( x) − p( x) ≤ ∫
a
2(b − a )
dx =
ε
2
dır. Böylece ; integraller için (7.2.17) Minkowski eşitsizliğinden ( DAVIS,P.J.,
‘Interpolation and Approximation’, Dover Publication, Inc.,New York (1975) ) ;
b
∫
a
b
f ( x) − p ( x) dx = ∫ f ( x) − g ( x) + g ( x) − p ( x)
a
⎞
⎞ ⎛b
⎛b
≤ ⎜⎜ ∫ f ( x) − g ( x) dx ⎟⎟ + ⎜⎜ ∫ g ( x) − p ( x) dx ⎟⎟
⎠
⎠ ⎝a
⎝a
≤
ε
2
+
ε
2
=ε
olur.
Örnek 3.5.4 : X ,
z ≤ 1 ’de olan analitik fonksiyonların kümesi olsun.
f = max f ( z )
z ≤1
olmak üzere , z , z 2 , z 3 , K ,
X ’de kapalı değildirler . Eğer kapalı olsalardı , her
ε > 0 için ;
(
)
max 1 − a1 z + a2 z 2 + K + an z n ≤ ε
z ≤1
olacak şekilde a1 , a2 , K , an sabitleri bulunabilirdi. Eşitsizlikte , özellikle z = 0
konulursa
1≤ ε
69
3.EN KÜÇÜK KARELER YAKLAŞIMI
olur. Bu ise ε =
Oray OR
1
seçilirse bir çelişkidir.
2
Kapanışın anlamına bakmadan önce , bazı genel topolojik kavramları
hatırlatmak yararlı olacak.
X , d ( x, y ) uzaklık fonksiyonu ile tanımlı bir metrik uzay olsun . Eğer
x0 ∈ X ise , d (x, x0 ) < r şartını sağlayan x ∈ X elemanlarının tümünü içeren
U ( x, x0 ) kümesine bir açık yuvar adı verilir.
S bir metrik uzay ve x ∈ S olsun. Eğer U ( x, r ) ⊆ S olacak şekilde bir
r > 0 sayısı varsa , x ∈ S ’ye S ’nin bir iç elemanı denir.
Bir metrik uzayda ve dolayısıyla normlu bir vektör uzayında yakınsaklık şu
şekilde tanımlanabilir.
Tanım 3.5.2 : X bir metrik uzay ve {xn } , X ’de elemanların bir dizisi
olsun. Eğer x ∈ X için ,
lim d ( x, xn ) = 0
(3.5.2)
n →∞
ise ,
{xn }
dizisine x elemanına yakınsaktır denir.
Normlu bir uzayda (3.5.2) ,
(3.5. 2′ )
lim x − xn = 0
n →∞
ifadesine eşit olur.
Yakınsak bir dizinin limiti tektir. Kabul edelim ki xn dizisinin iki limiti
olsun. Yani ;
lim d ( x, xn ) = 0
ve
n →∞
lim d ( y, xn ) = 0
n→∞
olsun. Metrik uzay olma eşitsizliklerinden olan üçgen eşitsizliğinden ;
0 ≤ d ( x, y ) ≤ d ( x, x n ) + d ( y , x n )
dır. n → ∞ için d (x, y ) = 0 elde ederiz ve böylece
70
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
x= y
olur.
Sonuç olarak lim x − x n = 0 ise , {xn } dizisinin limiti x ’dir denir ve
n →∞
lim xn = x
n→∞
(3.5.3)
şeklinde gösterilir.
(3.5. 2′ ) normda yakınsaklık olarak adlandırılır. Eğer norm bir integral ile
tanımlanmış ise yakınsaklık ortalama yakınsaklık olarak adlandırılır.
Fonksiyonların normlu vektör uzayları olması halinde , yakınsaklık türleri
(noktasal,düzgün) diğer yakınsaklık türlerinden farklıdır. Normlu uzayda
fonksiyonların bir dizisi noktasal yakınsak olmadan yakınsak olabilir. Bu nedenle ,
bu ayırım her zaman yapılmalıdır.
X bir metrik uzay ve S ⊆ X olsun. S ile S ’nin kapanışını göstermek
üzere S , S ’nin yakınsak dizilerinin bütün limitlerinin kümesi olarak tanımlanır.
S ⊆ S olduğu açıktır. ( Çünkü ; s ∈ S olmak üzere sn = s ( sabit ) alırsak
lim sn = s ∈ S olup S ⊆ S dir.)
n →∞
Eğer S = S ise S ’ye kapalıdır denir. S = X ise S kümesine X ’de
yoğundur denir. X sayılabilir yoğun bir alt kümeye sahip ise X ’e ayrılabilirdir
denir.
Eğer
lim xn = x
n→∞
ise , o zaman ,
d ( x m , x n ) ≤ d ( x , x m ) + d ( x, x n )
olduğundan bütün m , n > N (ε ) için
d ( xm , xn ) ≤ ε
yazabiliriz. Ancak rasyonel sayıların metrik uzayı olarak alındığı taktirde
( d ( x, y ) = x − y
ile ) bunun tersi doğru değildir. Önemli olan bunun doğru
olduğu uzaylarda tartışmaktır.
71
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Tanım 3.5.3 : X bir metrik uzay ve {xn } , X ’in elemanlarının bir dizisi
olsun. Her ε > 0 ve tüm m, n ≥ N (ε ) için
d ( xm , xn ) ≤ ε
olacak şekilde bir N (ε ) sayısı varsa {xn } ’e bir Cauchy dizisi denir. Eğer her
Cauchy dizisi X ’de bir limite sahipse X uzayına tamdır denir.
Eğer X tam normlu bir vektör uzayı ise ve her ε > 0 için ,
xm − x n ≤ ε
,
m, n ≥ N (ε )
(3.5.4)
olacak şekilde N (ε ) sayısı bulunabiliyorsa o zaman ,
lim x − xn = 0
(3.5.5)
n→∞
olacak şekilde bir x ∈ X vardır.
Tam normlu bir vektör uzayı Banach uzayı olarak adlandırılır.
Örnek 3.5.5 : X = C[−1,1] uzayı
f
2
1
=
∫ ( f ( x)) dx
2
normu ile verislsin.
−1
⎡ n ⎤
f n ( x) = ⎢
4 2
⎣1 + n x ⎥⎦
12
olsun. O zaman ,
0 − fn
2
1
=
1
(
( ))
n
n
2
∫−11 + n 4 x 2 dx = −∫11 + n 2 x 2 dx = n Arc tan n x
( )
72
1
=
−1
2
Arc tan n 2 → 0
n
3.EN KÜÇÜK KARELER YAKLAŞIMI
dır. Çünkü x ∈ R için
Arc tan x ≤
Oray OR
π
2
dir.
Noktasal yakınsak ise x ∈ [−1,1] için f n ( x) → f ( x) dir. O halde
f n (0) → f (0) = 0 olmalıdır. Ancak , f n (0) → ∞ ’dur.
Örnek 3.5.6 : C n kompleks Öklid uzayı tamdır ve böylece bir Banach
uzayıdır.
x = y + iz , C n ’de bir Cauchy dizisi olsun. R ’nin tamlığı bilindiğinden y ve z
gerçel sayı dizileri Cauchy dizisidirler ve yakınsaktırlar.
y→a ⎫
⎬ x → a + ib
z →b ⎭
dir. Dolayısıyla C n tamdır.
Örnek 3.5.7 : C[a, b] uzayı üzerinde
f = max f ( x) normu tanımlansın.
a ≤ x ≤b
Bu uzay tamdır.
Eğer ;
max f m ( x) − f n ( x) ≤ ε
a ≤ x ≤b
, m, n > N (ε )
(*)
ise , o zaman , f m ( x) dizisi [a, b] üzerinde düzgün yakınsaktır. Herhangi bir
t ∈ [a, b] için de ,
f m (t ) − f n (t ) ≤ ε
dır. Bu ise f m (t ) ’nin bir Cauchy dizisi olduğunu gösterir. Hatta
( f1 (t ), f 2 (t ),K ,)
dizisi reel terimli bir Cauchy dizisidir. R tam olduğundan bu dizi yakınsaktır.
m → ∞ için f m (t ) → f (t ) olur. Bu şekilde her t ∈ [a, b] noktasıyla bir tek reel
f ( x) sayısı eşleyebiliriz. Bu ise [a, b] üzerinde bir f ( x) fonksiyonu tanımlar. ( * )
’da n → ∞ için ,
max f ( x) − f n ( x) ≤ ε
a ≤ x ≤b
, a ≤ x ≤ b , n ≥ N ′(ε )
olacak şekilde f ( x) fonksiyonu vardır ve bu
f n ’nin f ’e bu normda
yakınsadığını gösterir. f n ’lerin sürekli ve yakınsaklığın düzgün olması nedeniyle,
73
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
limit fonksiyonu olan f ( x) ’de [a, b] üzerinde süreklidir. O halde f ( x) ∈ C[a, b]
’dir. O halde C[a, b] tamdır.
Örnek 3.5.8 : X = C[a, b] uzayı ,
2
f
b
= ∫ f ( x) dx normu ile
2
a
tanımlanmış ise X tam değildir. Bu, X ’de bir elemana yakınsak olmayan bir
Cauchy dizisi bularak gösterilebilir.
Çözüm : Kolaylaştırmak için a = −1 , b = 1 alalım ve f n ( x) sürekli
fonksiyonu
⎧
⎪− 1
⎪
⎪
⎪⎪
f n ( x) = ⎨nx
⎪
⎪
⎪
⎪1
⎪⎩
−1 ≤ x ≤
−
−1
n
1
1
≤x≤
n
n
1
≤ x ≤1
n
olsun. f ( x) ,
⎧− 1
⎪
f ( x) = ⎨
⎪1
⎩
−1 ≤ x ≤ 0
0 < x ≤1
sürekli olmayan fonksiyon olsun. Şimdi
f ( x) − f n ( x)
2
=
0
1n
−1 n
0
2
2
∫ (− 1 − nx ) dx + ∫ (1 − nx ) dx =
olur. Bundan dolayı
lim f − f n
n →∞
2
=0
olur. f n (normda) f ’e yakınsaktır ve üstelik ,
74
2
3n
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
fn − fm = fn − f + f − fm ≤ fn − f + fm − f
≤
olduğundan
ε
2
+
ε
2
=ε
f n bir Cauchy dizisidir . Yakınsadığı f ise bu uzayın bir elemanı
olmadığından , X uzayı tam değildir.
Teorem 3.5.1 : x1* , x2* , K ,
’ler bir X iç çarpım uzayında ortonormal
elemanların bir dizisi olsun. Bu dizi yalnızca sonlu sayıda elemanlardan da oluşmuş
olabilir. Aşağıdaki yedi ifadeyi göz önüne alalım.
(A) xi* ’lar X ’de kapalıdır.
(B) Her y ∈ X elemanının Fourier serisi normda y ’ye yakınsar ; yani ,
n
(
)
lim y − ∑ y, xk* xk* = 0
n→∞
(3.5.6)
k =1
dır.
(C) Parseval özdeşliği sağlanır. Yani , her y ∈ X için ,
y
2
∞
= ( y, y ) = ∑
n =1
( y, x )
*
n
2
(3.5.7)
( C ′) Genişletilmiş Parseval özdeşliği sağlanır. Yani , her x, y ∈ X için ,
(x, y ) = ∑ (x, xn* )(xn* , y )
∞
n =1
dır.
(D) x1* , x2* , K , ’ı içeren daha büyük ortonormal sistem yoktur.
75
(3.5.8)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
(E) x1* , x2* , K , elemanları tamlık özelliğine sahiptir. Yani y ∈ X ve
(y, x ) = 0
*
k
, k = 1,2, K
ise y = 0 ’dır.
(F) X ’in bir elemanı , onun Fourier katsayıları tarafından tek olarak
belirlenir. Yani ,
(
) (
eğer w, xk* = y, xk*
)
ise , o zaman w = y
, k = 1,2, K ,
dir.
O halde
A ⇔ B ⇔ C ⇔ C′ ⇒ D ⇔ E ⇔ F
(3.5.9)
olur. Eğer X tam bir iç çarpım uzayı ise D ⇒ C olur ve böylece tüm bu yedi
durum denktirler. Yani ,
A ⇔ B ⇔ C ⇔ C′ ⇔ D ⇔ E ⇔ F
(3.5.10)
olur.
İspat : A ⇔ B olduğunu gösterelim.
(⇒ )
A doğru olsun. (2.5.1) ’den ;
n
(
)
n
y − ∑ y, xk* xk* ≤ y − ∑ ak xk*
k =1
k =1
dır. A ’dan dolayı ve (3.5.1) gereğince son ifade
n
y − ∑ ak xk* ≤ ε
k =1
şeklinde yazılabilir. Bu da B ’nin yani (3.5.6) ’nın sağlanması demektir. Çünkü , her
ε > 0 ve n ≥ n0 için
(
n
y − ∑ y, xk* xk*
)
≤ε
k =1
olacak şekilde bir n0 ∈ N vardır. O halde
n
(
)
lim y − ∑ y, xk* xk* = 0
n→∞
k =1
dır. A ⇒ B sağlanır.
76
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
(⇐) B doğru olsun. O halde ,
bir y elemanına onun Fourier serileriyle
yaklaşabiliriz. Böylece B ⇒ A sağlanır.
O halde A ⇔ B dir.
B ⇒ C ′ olduğunu gösterelim.
B sağlansın. Ortogonallikten ;
n
n
n
n
⎛
⎞
⎜ x − ∑ x, xk* xk* , y − ∑ y, xk* xk* ⎟ = ( x, y ) − ∑ y, xk* x, xk* − ∑ x, xk* xk* , y +
k =1
k =1
k =1
k =1
⎝
⎠
(
)
(
)
(
n
(
)(
)(
)(
(
)(
)
+ ∑ x, xk* y, xk* xk* , xk*
(
)(
(
)
)
)
k =1
n
= ( x, y ) − ∑ x, xk* xk* , y
)
k =1
Schwarz eşitsizliğinden ;
n
n
n
⎛
⎞
⎜ x − ∑ x, xk* xk* , y − ∑ y, xk* xk* ⎟ = (x, y ) − ∑ x, xk* xk* , y
k =1
k =1
k =1
⎝
⎠
(
)
(
)
(
n
(
)(
)
≤ x − ∑ x, xk* xk*
k =1
)
n
y − ∑ y, xk* xk*
k =1
dır. B sağlandığından sağ tarfataki her iki ifade de n → ∞ için sıfıra yaklaşır.
Buradan
(x, y ) − ∑ (x, xk* )(xk* , y )
n
=0
k =1
olur. Böylece ,
(x, y ) = ∑ (x, xn* )(xn* , y )
∞
n =1
77
3.EN KÜÇÜK KARELER YAKLAŞIMI
olur. Dolayısıyla
Oray OR
B ⇒ C ′ dir.
Her y ∈ X için sağlandığından , C ′ ’nde x = y seçilerek son ifade
( y, y ) = ∑ (y, xn* )(xn* , y )
∞
n =1
şeklinde yazılır. Bu ise
(
∞
y = ( y, y ) = ∑ y, xn*
)
2
n =1
demektir. Buradan C ′ ⇒ C sağlanır.
Şimdi
C ⇒ B olduğunu gösterelim.
C sağlansın. Sonuç 2.5.3 ’ten
n
(
)
0 ≤ y − ∑ y, x x
*
k
k =1
2
2
= y
*
k
(
n
− ∑ y, xk*
)
2
k =1
olup, n → ∞ için her iki tarafın limiti alınırsa ;
0 ≤ lim
n→∞
y − ∑ ( y, x )x
n
*
k
k =1
2
*
k
⎛
= lim ⎜ y
n →∞
⎝
2
(
n
− lim ∑ y, xk*
n →∞
)
k =1
olur. (3.5.7) ’den bu
n
(
)
0 ≤ lim y − ∑ y, x x
n →∞
k =1
*
k
2
2
= y
*
k
∞
k =1
olur. Buradan ;
n
(
)
lim y − ∑ y, x x
n→∞
k =1
*
k
2
*
k
olur. O halde C ⇒ B sağlanır. Böylece
A ⇔ B ⇔ C ⇔ C′
sağlanmış olur.
Şimdi de A ⇒ D olduğunu gösterelim.
A ⇔ B olduğunu biliyoruz. ( (B ⇒ C ′ ) ’deki gibi )
78
(
− ∑ y, x
=0
*
k
)
2
=0
2
⎞
⎟
⎠
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
⎛
⎡n
⎤ ⎞⎛
⎡n
⎤⎞
⎜⎜ x − ⎢∑ x, xk* xk* + ( x, w)w⎥ ⎟⎟⎜⎜ y − ⎢∑ y, xk* xk* + ( y, w)w⎥ ⎟⎟
⎣ k =1
⎦ ⎠⎝
⎣ k =1
⎦⎠
⎝
(
)
(
)
⎡n
⎤
= ( x, y ) − ⎢∑ x, xk* xk* , y + ( x, w)(w, y )⎥
⎣ k =1
⎦
(
)(
)
olup , n → ∞ limit alınırsa ( ( B ⇒ C ′ ) ’deki gibi )
(x, y ) = ∑ (x, xk* )(xk* , y ) + (x, w)(w, y )
∞
k =1
olur. x = y ve y = w alınırsa
w
2
(
∞
= (w, w) = ∑ w, xk*
)
2
+ (w, w)
2
(1)
k =1
olur. (2.9.8) ’den
2
w
∞
(
= (w, w) = ∑ w, xk*
)
2
(2)
k =1
olur. (1) ve (2) den
(w, w)
olur.
=0 ⇒
(w, w) = 0
w = 1 olduğundan bu bir çelişkidir. O halde A ⇒ D sağlanır.
Şimdi D ⇔ E olduğunu gösterelim.
( ⇒ ) Burada D ⇒ E yerine
(
E ′ ⇒ D′ olduğunu göstereceğiz.
)
Varsayalım ki y ∈ X ve y, xk* = 0 olacak şekilde y ≠ 0 var olsun. O halde
x1* , x2* , K ,
y
y
sistemi , x1* , x2* , K ,
sisteminden daha geniş bir ortonormal
sistem olmuş olur. Bu ise D′ ’ünü verir. O halde E ′ ⇒ D′ olur.
Olmayana ergi metodundan D ⇒ E sağlanır.
79
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
(y, x ) = 0
( ⇐ ) E doğru olsun. Yani y ∈ X ve
halde x1* , x2* , K ,
y
y
;
x1* , x2* , K ,
*
k
⇒
y = 0 olsun. O
’dan daha geniş bir ortonormal sistem
olamaz. Çünkü ;
y = 0 ’dır. Dolayısıyla
y
y
şeklinde bir vektör bulamayız. O halde E ⇒ D
sağlanır.
Böylece D ⇔ E sağlanmış olur.
Şimdi de E ⇔ F olduğunu gösterelim.
(
) (
( ⇒ ) E doğru olsun. Farzedelim ki w, xk* = y, xk*
)
, k = 1,2, K ,
olsun. O zaman
(w − y, x ) = 0
, k = 1,2, K ,
*
k
olur. E ’den dolayı
w− y = 0 ⇒
w= y
dir. Böylece E ⇒ F sağlanır.
( ⇐ ) Burada yine olmayana ergi metodunu kullanarak , F ⇒ E yerine
E ' ⇒ F ' olduğunu gösterceğiz.
E yanlış olsun. Yani ,
(z, x ) = 0
*
k
, k = 1,2, K ,
olacak şekilde bir z ≠ 0 bulabiliriz. Her y için ,
(y, x ) = (y + z, x )
*
k
*
k
80
, k = 1,2, K ,
3.EN KÜÇÜK KARELER YAKLAŞIMI
(
) (
) (
dır. Çünkü , y, xk* = y, xk* + z , xk*
Oray OR
)
(
)
olup , kabulden z , xk* = 0 dır. Böylece y ve
y + z aynı Fourier katsayılı iki farklı eleman olur. Bu ise F ' ’ünü verir. Dolayısıyla
F ⇒ E sağlanmış olur.
Böylece (3.5.9) zinciri tamamlanmış olur.
Şimdi F ⇒ B olduğunu göstereceğiz ve böylece (3.5.10) ’daki zinciri
kurmuş olacağız.
Farzedelim ki X tam ve F doğru olsun. w ∈ X olsun ve
n
(
)
sn = ∑ w, xk* xk*
(3.5.11)
k =1
elemanlarını düşünelim. n > m için ,
s n − sm =
∑ (w, x )x
n
*
k
k =m +1
*
k
yazabiliriz öyle ki
sn − sm
2
=
∑ (w, x )
n
*
k
k =m +1
2
(3.5.12)
dır. Gerçekten ;
sn − sm
2
n
⎛ n
⎞
= (sn − sm , sn − sm ) = ⎜ ∑ w, xk* xk* , ∑ w, xk* xk* ⎟
k = m +1
⎝ k =m+1
⎠
(
=
(
*
k
*
k
∑ (w, x )
n
k = m +1
*
k
2
dır.
(2.5.3) Bessel eşitsizliğinde n → ∞ limit alınırsa ;
n
(
lim ∑ w, xi*
n→∞
i =1
)
2
∞
(
)
= ∑ w, xn* ≤ w
n =1
81
)
∑ (w, x )(w, x )(x , x )
n
k = m +1
=
)
2
<∞
*
k
*
k
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
olur. Bu serinin kısmi toplamlar dizisi sınırlı ve dolayısıyla yakınsak olacağından
∀ ε > 0 ve ∀ m, n ≥ N (ε ) için ,
sn − sm
2
=
∑ (w, x )
n
*
k
k =m +1
2
≤ε
olacak şekilde bir N (ε ) bulabiliriz. Böylece {sn } bir Cauchy dizisidir ve X ’in
tamlığının varsayımından bir s ∈ X elemanına yakınsar. Yani ,
lim s − sn = 0
(3.5.13)
n→∞
dır. v sabit ve n ≥ v olsun. O zaman ,
(s − s , x ) = (s, x ) − (s , x ) = (s, x ) − (w, x )
*
v
n
*
v
n
*
v
*
v
*
v
dır. Çünkü ;
(
n
)
sn = ∑ w, xk* xk*
k =1
olduğundan
(s , x ) = ∑ (w, x )(x , x ) = (w, x )
n
*
v
n
*
k
k =1
*
k
*
v
*
k
dır. Schwarz eşitsizliğinden ,
(s − s , x ) = (s, x ) − (w, x ) ≤
n
*
v
*
v
*
v
s − sn
xv* = s − sn
dır. Bu ifadede n → ∞ limit alınır ve (3.5.13) göz önünde bulundurulursa ;
(
) (
)
0 ≤ s, xv* − w, xv* ≤ lim s − sn = 0
n→∞
olup
(s, x ) = (w, x )
*
v
*
v
, v = 1,2, K ,
elde edilir. F ’den bu s = w olduğunu gösterir ve (3.5.13)
82
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
n
(
)
lim w − ∑ w, xk* xk* = 0
n→∞
k =1
şeklinde yazılır. Bu ise kesinlikle B ’dir. O halde F ⇒ B sağlanır.
Böylece (3.5.10) zinciri tamamlanır.
Tanım 3.5.4 : X bir iç çarpım uzayı ve S ⊂ X olsun.
Eğer ∀ x ∈ S için ;
( y, x ) = 0
(3.5.14)
iken y = 0 ise S ’ye tamdır denir.
Gördüğümüz gibi, tam bir iç çarpım uzayında tamlık ve kapalılık denk kavramlardır.
b
Örnek 3.5.9 : X = C[a, b] , ( f , g ) = ∫ f ( x) g ( x)dx şeklinde tanımlanmış
a
olsun. Bir f ∈ C[a, b] ve ε > 0 için, f sürekli olduğundan Teorem 6.1.1
Weierstrass Yaklaşım Teoremi ’nden (DAVIS,P.J., ‘Interpolation and
Approximation’, Dover Publication, Inc.,New York (1975) ) ;
(
)
f ( x) − a0 + a1 x + K + an x n ≤ ε
, a≤ x≤b
olacak şekilde ak sabitlerini bulabiliriz.
Son ifadede her iki tarafın integrali alınırsa ;
∫ ( f ( x) − (a
b
0
+ a1 x + K + an x n
) ) dx ≤ ε (b − a )
2
2
a
olur. Bu ifade ise ,
n
n
⎞
⎛
⎜ f − ∑ ai x i , f − ∑ ai x i ⎟ = f − Pn ≤ ε b − a
i =0
i =0
⎠
⎝
83
3.EN KÜÇÜK KARELER YAKLAŞIMI
olup , buradan 1, x, x 2 , K ,
Oray OR
X ’de kapalıdır.
xk* elemanlarını Legendre polinomları ile değiştirerek tüm Teorem 3.5.1 A-F
durumları izlenir. Özellikle , eğer f ∈ C[a, b] ve eğer
( f , x ) = ∫ f ( x) x dx = 0
b
n
n
, n = 0,1, K ,
a
ise , o zaman , Teorem 3.5.1 (E) ’den f ( x) ≡ 0 dır.
Teorem 3.5.2 ( Riesz ) : X bir tam iç çarpım uzayı ve {ak }k =1 dizisi
∞
∞
∑
ak
k =1
koşulunu sağlayan bir dizi ve
{x }
* ∞
k k =0
(y, x ) = a
*
k
2
<∞
ortonormal sistem olsun. Bu durumda
k
,
k = 1,2, K ,
(3.5.15)
olacak şekilde bir y ∈ X vardır.
n
İspat : sn = ∑ ak xk* elemanlarını göz önüne alalım.
k =1
s n − sm
2
n
n
⎞
⎛ n
= (sn − sm , sn − sm ) = ⎜ ∑ ak xk* , ∑ ak xk* ⎟ = ∑ ak
k = m +1
⎠ k =m+1
⎝ k =m+1
∞
dır.
∑
k =1
ak
2
serisi hipotezden yakınsak olduğundan ,
ve
lim y − sn = 0
n→∞
84
{ sn }
2
(x , x ) = ∑
*
k
*
k
n
k = m +1
ak
2
bir Cauchy dizisidir
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
olacak şekilde bir y vardır. ( Çünkü ;
n
U n = ∑ ak
2
olan U n kısmi toplamlar dizisi yakınsaktır. Dolayısıyla bir
k =1
Cauchy dizisidir. Yani , m, n ≥ N (ε ) için , U n − U m < ε olacak şekilde bir N (ε )
bulunabilir. Buradan ,
Un −Um =
olduğundan
{ sn }
n
∑
k = m +1
2
ak
= sn − s m
2
<ε
bir Cauchy dizisidir. )
k sabit ve n ≥ k ile
Schwarz ’dan ;
y − sn = y − sn
xk*
(
) (
)
≥ y − sn , xk* = y, xk* − ak
dır. Son ifadede n → ∞ için limit alınırsa
lim y − sn = 0
n→∞
olur. Dolayısıyla ,
(y, x ) − a
*
k
k
=0 ⇒
olup (3.5.15) sağlanır.
85
(y, x ) = a
*
k
k
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
3.6 Tam İç Çarpım Uzaylarının Geometrik Özellikleri
Teorem 2.5.1 ’de verilen bir elemandan bir lineer manifolda minimum bir
uzaklığın var olduğunu gördük. Bu kısımda bunu daha genel alt kümelere nasıl
genişletebileceğimizi inceleyeceğiz. Teorem 3.6.1 bunun için büyük önemde
yeterli bir durum sağlar.
Teorem 3.6.1 : X tam bir iç çarpım uzayı olsun. M , X ’in kapalı (
topolojik olarak ) , konveks ve boş olmayan bir alt kümesi olsun. y ∈ X ve
d = inf y − x
(3.6.1)
x∈M
şeklinde kuralım. O zaman M ’de ;
y − x0 = d
(3.6.2)
olacak şekilde tek bir x0 vardır.
M
d
x0
y
Şekil 3.6.1
İspat : (3.6.1) ’den M ’de
lim y − xn = d
n→∞
86
(3.6.3)
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
olacak şekilde xn elemanlarının bir dizisini bulabiliriz. Teorem 2.1.3
Paralelkenar teoreminden ;
xm − xn
2
= x m − y + y − xn
2
2
= xm − y − ( xn − y )
2
2
= 2 xm − y + 2 xn − y − 2 y − xm − xn
2
= 2 xm − y
+ 2 xn − y
2
−4 y−
2
1
( x m + xn )
2
1
(xm + xn ) ∈ M ’dir.Böylece
2
olur. M konveks olduğundan
y−
1
( xm + xn )
2
2
≥ d2
elde edilir. Çünkü ;
d = inf y − x
x∈M
x ile y arasındaki uzaklığın en küçüğü d ise, herhangi bir eleman için bu uzaklık
d ’den büyük veya en fazla eşit olur.
Dolayısıyla ,
xm − xn
2
≤ 2 y − xm
2
+ 2 y − xn
2
− 4d 2
dir. (3.6.3) ile m, n → ∞ için ,
xm − xn
dır. Bunun anlamı
{ xn }
2
→0
dizisinin bir Cauchy dizisi olmasıdır. X tam olduğundan
(her Cauchy dizisi yakınsaktır )
x m − x0 → 0
olacak şekilde x0 ∈ X vardır. M kapalı olduğundan x0 , M ’dedir.
Şimdi ,
87
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
y − x0 = y − xn + xn − x0 ≤ y − xn + xn − x0 → d + 0 = d
(1)
dır. Diğer taraftan , (3.6.1) ’den
y − x0 ≥ d
(2)
dir. Öyleyse (1) ve (2) ’den
y − x0 = d
dir.
Şimdi de x0 ’ın tek olduğunu gösterelim.
Farzedelim ki ,
y − x0 = y − x1 = d
1
(x0 + x1 ) ,
2
olacak şekilde x0 ve x1 ’ e sahip olalım. M konveks olduğundan
M ’dedir. Böylece
d ≤ y−
≤
1
(x0 + x1 ) = 1 y + 1 x0 + 1 y − 1 x1
2
2
2
2
2
d d
1
1
y − x0 +
y − x1 = + = d
2
2
2 2
olur. Buradan
y−
1
(x0 + x1 ) = d
2
dir. Paralelkenar teoreminden
x0 − x1
2
= 2 y − x0
2
+ 2 y − x1
2
−4 y−
1
(x0 + x1 )
2
2
= 2 d 2 + 2d 2 − 4d 2
=0
olur. Öyleyse
x0 = x1 dir.
Teorem 3.6.2 : X tam bir iç çarpım uzayı ve M , X ’den farklı kapalı bir alt
vektör uzayı olsun. Bu durumda sıfırdan farklı bir z ⊥ M elemanı vardır. Yani ,
y ∈ M için
88
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
(z, y ) = 0
dır.
İspat : w ∉ M olsun. d ,
d = inf w − y
y∈M
şeklinde tanımlansın. Teorem 3.6.1 ’den , M ’de
w − y0 = d
olacak şekilde bir y0 ∈ M elemanı vardır . w − y0 = z diyelim. z ≠ 0 ’dır. Aksi
taktirde w = y0 ∈ M olup kabulümüzle çelişir.
M vektör uzayı olduğundan , tüm y ∈ M ve tüm c ’ler için , y0 + cy ∈ M
’ dir. Böylece
d ≤ w − ( y0 + cy ) = w − y0 − cy = z − cy
olur. O zaman ,
z = w − y0 = d
2
⇒ z
= d2
ve
z − cy
2
≥ d2 = z
z − cy
2
− z
2
2
≥0
dır. Bu ,
z − cy
2
= ( z − cy, z − cy ) = z
2
− ( z , cy ) − (cy, z ) + c
= z
olduğundan ;
89
2
2
2
y
− c( z , y ) − c( y, z ) + c
2
y
2
3.EN KÜÇÜK KARELER YAKLAŞIMI
c
2
y
Oray OR
2
− c( y, z ) − c( z , y ) ≥ 0
anlamına gelir. Özel olarak , burada σ gerçel sayı olmak üzere
c = σ (z, y )
seçilirse, o zaman tüm σ ’lar için ,
(z, y ) 2 {σ 2
y
2
}
− 2σ ≥ 0
dır. Ancak σ > 0 ve yeterince küçükler için ,
σ2 y
negatiftir. Böylece ,
(z, y ) 2
2
− 2σ
negatif olamayacağından ,
(z, y ) 2 = 0
olur.
Dolayısıyla ,
(z, y ) = 0
dır.
Sonuç 3.6.3 : X tam bir iç çarpım uzayı ve M , X ’den farklı kapalı bir
alt vektör uzayı olsun. X ’in , M dışındaki bir elemanını M ’nin elemanlarına
birleştiren vektörler arasında minimal uzunluğa sahip olan , M ’ye diktir.
Teorem 3.6.4 : M ,
[a, b] üzerinde konveks olan , derecesi ≤ n olan
polinomların kümesini belirtsin. f ( x) ∈ L2 [a, b] olsun. O zaman ,
min f − p
p∈M
(3.6.4)
problemi tek bir çözüme sahiptir.
İspat : Teorem 3.2.1 ( DAVIS,P.J., ‘Interpolation and Approximation’,
Dover Publication, Inc.,New York (1975) ) ’den ;
Bir p( x) polinomu [a, b] üzerinde konvekstir ancak ve ancak [a, b] üzerinde
p′′( x) ≥ 0 dır.
90
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
Eğer p ve q , [a, b] üzerinde konveks iseler , o zaman
r = t p ( x) + (1 − t )q ( x)
r de 0 ≤ t ≤ 1 için [a, b] üzerinde konvekstir. Hatta
r ′′ = t p′′ + (1 − t )q′′ ≥ 0
olup buradan r konvekstir. M böylece konvekstir.
Şimdi de M ’nin , L2 [a, b] nin kapalı bir alt kümesi olduğunu
göstereceğiz.
pk ( x ) ∈ M ,
f ( x) ∈ L2 [a, b]
ye yakınsak olsun, yani ,
b
lim ∫ f ( x) − pk ( x) dx = 0
k →∞
2
a
olsun. q( x) , f ( x) ’e Pn ’de en iyi yaklaşan eleman olsun.( Sonuç 2.5.2 ’deki gibi
)
O zaman ,
b
b
0 ≤ ∫ f ( x) − q ( x) dx ≤ ∫ f ( x) − pk ( x) dx
2
a
a
k → ∞ için
b
∫
2
f ( x ) − q ( x) dx = 0
a
olur , öyle ki Pn ’de
f ( x) = q( x) olur. O halde M ⊂ Pn dir.
Şimdi de ;
P0* ( x), P1* ( x), K , Pn* ( x) polinomları [a, b] aralığındaki dereceleri ≤ n olacak
şekilde ortonormal polinomlar olsun. O zaman , bazı aik sabitleri için
91
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
f ( x) − pk ( x) ≡ a0 k P0* + K + ank Pn* ( x) , k = 1,2, K ,
yazılabilir ve böylece ,
b
∫
f ( x) − pk ( x) dx = ( f − pk , f − pk )
2
a
(
= a0 k P0* ( x) + K + ank Pn* , a0 k P0* + K + ank Pn*
2
2
= a0 k + a1k + K + ank
n
= ∑ aik
2
)
2
→0
i =0
dır. Böylece ;
lim aik = 0 , i = 0,1, K , n
k →∞
olur. Şimdi ,
n
f ( z ) − pk ( z ) ≤ ∑ aik pi* ( z )
i =0
dır. Çünkü ;
f ( z ) , z ≤ R çemberinde analitik olsun. O zaman
n
f ( z ) = ∑ ak z k
k =0
z ≤ R ’de düzgün olarak yakınsar. Böylece verilen bir ε > 0 için, bu kuvvet
serisinin yeterince elemanlarını alabilir ve z ≤ R için
f ( z ) − pn ( z ) ≤ ε
olacak şekilde
92
3.EN KÜÇÜK KARELER YAKLAŞIMI
Oray OR
n
p n ( z ) = ∑ ak z k
k =0
polinomuna varırız. Keyfi bir − R ≤ x ≤ R gerçel aralığı üzerinde
f ( x ) − pn ( x ) ≤ ε
dir. Ancak analitik olmayan fonksiyonlar için kuvvet serilerinde böyle bir genişleme
söz konusu değildir.
Böylece kompleks düzlemdeki her sınırlı bölge üzerinde pk ( z ) → f ( z )
düzgün olarak yakınsar. Buradan ;
″
pk ( z ) → f ′′( z )
″
o bölge üzerinde düzgün olarak yakınsar ve [a, b] üzerinde pk ( x ) ≥ 0
olduğundan o bölge üzerinde
f ′′( x ) ≥ 0 olur. Yakınsadığı fonksiyon polinom
olduğundan limiti de M içinde olur. O halde M kapalıdır. Böylece , (3.6.1)
teoreminden
M konveks , kapalı ve L2 [a, b] ’nin boştan farklı bir alt kümesi
olduğundan
min f − p
p∈M
probleminin tek bir çözümü vardır.
93
KAYNAKLAR
CHENEY,E.W., 1966 . ‘Introduction to Approximation Theory’, McGraw-Hill
Book Company, New York.
DAVIS,P.J., 1975 . ‘Interpolation and Approximation’, Dover Publication, Inc.,
New York .
HAASER,N.B. ; SULLIVAN,J.A., 1971. ‘Real Analysis’ Van Nostrand Reinhold
Company , New York .
RIVLIN,T.J., 1966. ‘An Introduction to The Approximation of Functions’,
Blaisdell Publishing Company,Printed in the U.S.A .
________ , 1974 . ‘The Chebyschev Polynomials’, John Wiley and Sons Inc. ,
Printed in United States of America .
SMARZEWSKI,R., 1987 . ‘On Best Approximation in L p Spaces’, Journal of
Approximation Theory ,49: 93-98.
UBHAYA,V.A., 1990 . ‘Best Piecewise Monotone Uniform
Approximation’,Journal of Approximation Theory, 63:375-383.
94
ÖZGEÇMİŞ
1981 yılında Mersin’de doğdum. Öğrenimimi sırasıyla Cumhuriyet
İlkokulu , Mobil Ortaokulu , Hacı Sabancı Lisesi ’nde tamamladım. 1999
yılında Süleyman Demirel Üniversitesi Fen-Edebiyat Fakültesi Matematik
Bölümüne girdim. 2003 yılında mezun olup Çukurova Üniversitesi FenEdebiyat Fakültesi Matematik Bölümünde yüksek lisans yapmaya başladım.
95