1. DĠFERENSĠYEL DENKLEM SĠSTEMLERĠNĠN LYAPUNOV KARARLILIĞI
1.1. Lineer Olmayan Parametreli Diferensiyel Denklemler
Bu bölümde F : R m xR R m olmak üzere
dx
F ( x, t ) diferensiyel denklem sistemlerini
dt
inceleyeceğiz.
1.1.1.Tanım
Eğer F fonksiyonu t bağımsız değişkenini içermiyorsa bu sistemlere otonom sistem denir.
Aksi takdirde sisteme otonom olmayan sistem denir.
1.1.2. Tanım
dx
F ( x, t ) denklem sisteminin bağımsız değişkenlerinin oluşturduğu uzaya faz uzayı
dt
denir.
1.1.3. Tanım
dx
F ( x, t ) denklem sisteminin t t 0 anında herhangi bir x 0 noktası için çözüm olan
dt
x(t , t 0 , x0 ) eğrisine çözüm eğrisi yada faz eğrisi denir.
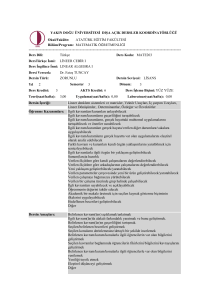
ġekil 1. Faz portresi ve yön alanı
1.1.4. Tanım
x(t , t 0 , x0 ) ın t üzerinde çizilen grafiğine integral eğrisi denir. I zaman aralığı olmak üzere
integral eğrisi;
x(t , t 0 , x0 ) ( x, t ) R n xR x x(t , t 0 , x0 ) , t I
şeklindedir.
1.1.5. Tanım
x 0 faz uzayında bir nokta olsun. x 0 noktası için bir yörünge Q( x 0 ) ile nitelendirilir. Q( x 0 ),
x 0 dan geçen çözüm eğrisi üzerinde faz uzayındaki noktaların kümesidir[2].
x 0 U R n için yörünge Q x R n x x(t , t 0 , x0 ), t I
şeklindedir.
Bir örnek üzerinde açıklayalım.
Örnek 1
dx
y
dt
dy
x
dt
(1)
0
( x, y) RxR denklemini çözelim. A
A I
0
dır. Özdeğer ve özvektörleri bulalım.
2 2 0 1 i, 2 i dir. Özvektörler ise
1 i 1T , 2 i 1T dir.
Buradan çözüm
x c1 cos t c2 sin t
y c3 cos t c4 sin t
olur. Bu değerleri denklem sisteminde yerine yazarsak c4 c1 , c2 c3 olur. x(0) 1, y(0) 0
başlangıç şartlarını uygularsak c1 1 ve c2 0 bulunur.
x cos t
y sin t
çözümdür. Bu noktadaki integral eğrisi
( x, y, t ) RxRxR x(t ), y(t ) (cos t, sin t ), t R
dır. Yörünge ise x 2 y 2 1 dir.
1.1.6. Tanım(Diferensiyel denklem sistemlerinin kritik noktası)
İki denklemli bir otonom sistemi ele alalım.
dx
dt F ( x, y )
dy
G ( x, y )
dt
(2)
Otonom sistemi için ( x0 , y 0 ) noktasına kritik nokta diyeceğiz. Eğer
F ( x0 , y 0 ) 0
G ( x0 , y 0 ) 0
Eğer ( x0 , y 0 ) bir denge nokta ise sistemimiz
x(t ) x0
y (t ) y 0
çözümüne sahiptir.
1.1.7. Tanım
Farz edelim ki ( x0 , y 0 ) noktası otonom sistemin denge noktası olsun. Sabit çözüm olan
( x(t ), y(t )) ( x0 , y0 ) çözümüne kritik çözüm yada denge çözüm denir.
1.1.8. Tanım
( x0 , y 0 ) denge noktası için lineer olmayan otonom sisteminin lineerleştirilmiş sistemi
dx
dt F ( x, y )
dy
G ( x, y )
dt
(3)
aşağıdaki sabit katsayılı lineer sistemdir.
dx1
dt b11 x1 b1 2 y1
dy
1 b21 x1 b2 2 y1
dt
Eğer denklem sistemi
parametreye bağlı
bi j ai j
ise
(i=1,2,j=1,2) olabilir
.Burada
x1 x x0 , y1 y y0 dır.
F
F
( x0 , y 0 ) b1 2
( x0 , y 0 )
x
y
G
G
b21
( x0 , y 0 ) b2 2
( x0 , y 0 )
x
y
b11
Her denge nokta için ayrı lineerleştirilmiş sistem oluşur. Bunların çözümleri birbirinden farklı
olabilir.
1.1.9. Tanım
Sadece ( x0 , y 0 ) kritik noktasını içeren bir R ( x, y) a x b, c y d
dikdörtgeni varsa
( x0 , y 0 ) kritik noktasına ayrık kritik nokta denir.
1.1.10. Tanım
Eğer
( x(0) x0 ) 2 ( y(0) y0 ) 2 iken lim ( x(t ), y(t )) ( x0 , y0 ) şartını sağlayan >0
t
varsa ( x0 , y 0 ) noktasına izole edilmiş denge nokta adı verilir. ( x0 , y 0 ) izole edilmiş denge
noktası kararlı ise asimptotik kararlıdır denilir.
1.1.11. Tanım
(3) Sisteminin ( x0 , y 0 ) izole edilmiş denge noktasına;
0, t 0 sayısı için ( x(0) x0 ) 2 ( y(0) y0 ) 2 iken ( x(t ) x0 ) 2 ( y(t ) y0 ) 2
olacak şekilde >0 sayısı varsa kararlıdır denir. İzole edilmiş denge nokta olan ( x0 , y 0 ) kararlı değil
ise kararsız noktadır denir.
1.1.12. Teorem
dx1
dt a11 x1 a1 2 x 2
dx
2 a 21 x1 a 2 2 x 2
dt
a11
lineer sistemini ele alalım. A
a 21
a1 2
matrisinin özdeğerleri sıfırdan küçük reel kısma sahip
a 2 2
olsun. Yani 1, 2 i , <0 olsun. O zaman (0,0) kritik noktası hem kararlı hem de asimptotik
kararlıdır. Eğer özdeğerler sadece sanal kısma sahipse yani 1, 2 i , 0 ise o zaman (0,0) noktası
sadece kararlıdır. Asimptotik kararlı değildir.
1.1.13. Ġspat
A matrisinin özdeğerleri 1 ve
x(t ) c11e
1t
2
olsun. Eğer 1 < 2 <0 ise sistemin çözümü
c2 2 e 2t
dir. i ler özvektörler ve c i ler sabitlerdir. e 1t ve e 2t t iken sıfıra yaklaşırlar. Dolayısıyla
lim x(t ) 0 dır.
t
Eğer özdeğerler sadece sanal kısma sahipse buradan (0,0) kararlı merkezdir. Buradan çözüm
ax 2 2bxy cy 2 C 0 kalıbında bir elips olur. Burada a,b ve c matris elemanları ile ilişkilidir. C
sabiti ise x(0) a bağlıdır. Verilen 0 sayısı için c yi uygun seçerek elipsi
yarıçaplı çember
içinde kalmasını sağlayabiliriz. Minimum prensibinden (0,0) noktası ile elipsin herhangi bir noktası
arasındaki mesafe sıfırdan farklıdır. Çözüm hiçbir zaman (0,0) noktasına yaklaşamaz. Bu yüzden
(0,0) noktası asimptotik kararlı değildir.
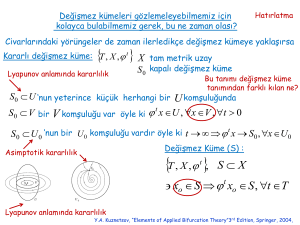
x Ax sisteminin çözümlerinin davranışının karakteri ve tekil noktalarının tipi, A lineer
operatörünün özdeğerleri ile belirlenebilir. Tekil noktalarının tipleri, bir eyer (a saddle), bir düğüm (a
node), bir odak (a focus) ve bir merkez (a center) noktası olabilir. A lineer operatörünün özdeğerleri
ise 1,2
1
iz ( A)
2
D , D iz ( A)2 4det( A) dır.
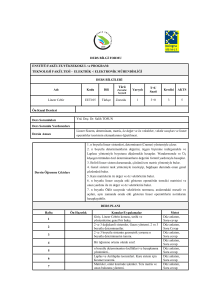
Tablo 1.Lineer diferensiyel denklem sistemlerinin çözüm eğrilerinin özdeğer ve özvektörlerine göre
sınıflandırılma tablosu
Özdeğerler
0 1 2
Şartlar
1 2 0
Noktası
1 0 2
0 1
Çözüm Eğrileri
İtici Özgün Düğüm Noktası
Çekici özgün Düğüm
Eyer Noktası
İtici Merkez Nokta
2
1 2 0
Çekici Merkez Nokta
İtici Dejenere Düğüm
1 2 0
İki Özvektör
1 2 0
İki Özvektör
1 2 0
Bir Özvektör
1 2 0
Bir Özvektör
1 2 0
Bir Özvektör
1, 2 i
>0,0
İtici Sarmal Nokta
1, 2 i
<0,0
Çekici Sarmal Nokta
1, 2 i
0
Kararlı Merkez Noktası
Noktası
Çekici Dejenere Düğüm
İtici Özgün Olmayan Düğüm
Noktası
Çekici Özgün Olmayan
Düğüm Noktası
Özgün Olmayan Merkez
Noktası
Tablo.2. Lineer sistem ile lineer olmayan sistem arasında kritik noktaların sınıflandırma ve kararlılık
karşılaştırılması tablosu
Özdeğerler
0 1
1 2 0
1 0 2
0 1
2
Lineer sistem
Lineer
OlmayanSistem
Kararsız
Kararsız
Asimptotik Kararlı
Asimptotik Kararlı
Eyer Noktası
Kararsız
Kararsız
İtici Merkez Nokta
Kararsız
Kararsız
Çözüm Eğrileri
İtici Özgün Düğüm
2
Noktası
Çekici özgün Düğüm
Noktası
1 2 0
1 2 0
Çekici Merkez Nokta
iki
iki
bir
özvektör
1 2 0
1, 2 i
>0,0
1, 2 i
<0,0
Kararsız
Asimptotik Kararlı
Asimptotik Kararlı
Kararsız
Kararsız
Asimptotik Kararlı
Asimptotik Kararlı
Kararsız
Belirsiz
İtici Sarmal Nokta
Kararsız
Kararsız
Çekici Sarmal Nokta
Asimptotik Kararlı
Asimptotik Kararlı
Kararlı
Belirsiz
Çekici Dejenere
İtici Özgün Olmayan
Düğüm Noktası
özvektör
1 2 0
Kararsız
İtici Dejenere
Düğüm
özvektör
1 2 0
Belirsiz
Düğüm Noktası
özvektör
1 2 0
Kararlı
bir
Çekici Özgün
Olmayan Düğüm
Noktası
Özgün Olmayan
Merkez Noktası
1, 2 i
Kararlı Merkez
0
Noktası
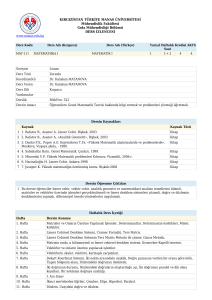
ġekil 2. İki boyutlu lineer otonom sistemlerin tekil noktalarının sınıflandırılması
1.1.14. Tanım(Lineer Olmayan Sistemin Kararlılığı)
Lineer olmayan sistemin kararlılığı her kritik nokta için oluşturulan lineerleştirilmiş X AX
sisteminde inceleyeceğiz.
dx
dt F ( x, y )
dy
G ( x, y )
dt
lineer olmayan sistemi ve ( x0 , y 0 ) kritik noktası için lineerleştirilmiş sistemimiz aşağıdaki matris ile
ifade edilir.
F
x ( x0 , y 0 )
A
G ( x0 , y 0 )
x
F
( x0 , y 0 )
y
G
( x0 , y 0 )
y
(4)
1.1.15. Teorem
Kabul edelim ki ( x0 , y 0 ) lineer olmayan sistemin izole edilmiş denge noktası olsun. ( x0 , y 0 )
ile lineerleştirilmiş sistemin matrisinin özdeğerleri negatif reel kısma sahipse ( x0 , y 0 ) izole edilmiş
kritik noktası lineer olmayan sistemin asimptotik kararlı noktasıdır.
Ġspat
Diferensiyel denklem sistemi
dx
F ( x) x R n
dt
olsun. Kabul edelim ki x=x0 kritik noktası olsun. O zaman F(x0)=0 dır. Vektör alanını orijine taşımak
için y=x- x0 alınmalıdır. O zaman denklem sistemi
dy
f ( y x0 )
dt
y Rn
şekline dönüşür. x0 noktası civarında taylor açılımı yapıldığında
dy
2
Df ( x0 ) y H ( y ) dir. H ( y) O y
dt
olur.
y u ,
0 1
u yeterince küçük alındığında y de buna bağlı olarak küçük olur. Denklemde yerine yazıldığında
du
Df ( x0 )u H (u ) olur. H (u ) H ( u) / dur.
dt
açıkça görülüyor ki H (u,0) 0 olur. Çünkü
V (u )
1 2
u Lyapunov fonksiyonunu alalım.
2
dir.
H ( y) O y
2
dV
du
(u ) V (u )
dt
dt
= u.Df ( x0 )u u.H (u, )
lineer cebirden de bilineceği üzere eğer Df(x0) matrisinin bütün özdeğerleri negatif reel kısma sahipse
u.Df ( x0 )u k u 2 0
olacak şekilde her u değeri için bir k reel sayısı vardır. Buradan u yeterince küçük almakla
u.Df ( x0 )u u.H (u, )
ifadesi kesin sıfırdan küçüktür. Buda x=x0 kritik noktasının asimptotik
kararlı olduğunu gösterir.
1.2. Lyapunov Yöntemi
1.2.1. Tanım(Lyapunov Fonksiyonu)
dx1
dt F1 ( x1 , x 2 ,.., x n )
.
.
.
.
.
.
dx
n
Fn ( x1 , x 2 ,..., x n )
dt
(5)
sistemi verilmiş olsun. Lyapunov fonksiyonları hareket uzayının orijine olan uzaklığı olarak da
tanımlanabilir.
Aşağıdaki koşulları sağlayan ( x1 , x2 ,..., xn ) fonksiyonuna, (5) sisteminin ( x10 , x20 ,.., xn0 ) izole edilmiş
denge noktasına göre Lyapunov fonksiyonu denir.
1.
( x10 , x20 ,.., xn0 ) noktasını içeren bir R dikdörtgeninde,
( x1 , x2 ,..., xn ) fonksiyonu sürekliyse
2.
( x10 , x20 ,.., xn0 ) kritik noktasında ( x10 , x20 ,.., xn0 ) =0
3.
( x10 , x20 ,.., xn0 ) noktasını içeren bir R dikdörtgeninde
0<r< iken ( x1 , x2 ,..., xn ) (r)
olacak şekilde pozitif artan sürekli bir fonksiyonsa
xi
(1 i n ) kısmi türevleri ve
r 2 ( x1 x10 ) 2 ... ( xn xn0 ) 2
4
( x10 , x20 ,.., xn0 ) noktasını içeren bir R dikdörtgeninde
F1
F2
... Fn
0
x1
x2
xn
(6)
eşitsizliği sağlanıyorsa
Burada en önemli koşul 4. koşuldur. Bu koşul bize fonksiyonunun lineer olmayan sistemin
çözüm eğrisi boyunca artmadığını gösteriyor. Kısmi türevlerin kombinasyonu olan bu 4.koşul
t ( x1 (t ), x2 (t ),..., xn (t )) çözüm eğrisi boyunca fonksiyonunun
d
( ( x1 (t ), x2 (t ),..., xn (t ))) toplam
dt
türevidir. Geometrik olarak 4. şartı in gradyant vektörü ve ( F1 , F2 ,..., Fn ) vektör alanının arasındaki
açının kosinüsünün sıfırdan küçük yada eşit olduğunu gösterir. Gradyantın geometrik tanımından
fonksiyonu ( F1 , F2 ,..., Fn ) vektör alanı yönünde artmadığını ifade eder.
1.2.2. Teorem (Lyapunov Teoremi)
( x10 , x20 ,.., xn0 ) kritik noktası için ( x1 , x2 ,..., xn ) fonksiyonu Lyapunov fonksiyonu ise bu
kritik nokta kararlıdır. Eğer F1
F2
... Fn
0 ise kritik nokta asimptotik kararlıdır.
x1
x2
xn
ispat:
fonksiyonu Lyapunov fonksiyonu olduğundan
r 2 ( x1 x10 ) 2 ... ( xn xn0 ) 2
olacak şekilde bir
( x1 , x2 ,..., xn ) (r)
fonksiyonumuz var. Şimdi hipotezden
dx1 dx2
dxn
d
...
( ( x1 (t ), x2 (t ),..., xn (t )))
x1 dt x2 dt
xn dt
dt
=
dır. Analizdeki teoremleri kullanarak
F1
F2 ...
Fn 0
x1
x2
xn
t
d
( x1 ( s), x2 ( s),..., xn ( s))ds
ds
0
( x1 (t ), x2 (t ),.., xn (t )) ( x1 (0), x2 (0),.., xn (0))
= ( x1 (0), x2 (0),.., xn (0))
fonksiyonu artan ve sürkli bir fonksiyondur. O zaman -1 ters fonksiyonu mevcuttur. Ve sonuçta
r (t ) ( x1 (t ) x10 ) 2 ( x2 t ) x20 ) 2 ... ( xn (t ) xn0 ) 2 iken
r (t ) 1 ( ( x1 (0), x2 (0),.., xn (0)))
olur. Şimdi verilen >0 sayısı için 0<1 iken -1()< olacak şekilde bir 1>0 sayısı seçebilir. Bu
1 değeri için
( x1 x10 ) 2 ( x2 x20 ) 2 ... ( xn xn0 ) 2 2 iken ( x1 , x2 ,..., xn ) <1
olacak şekilde bir 1>0 sayısı seçebiliriz. nin sürekli olmasından
( x10 , x20 ,.., xn0 ) =0
olduğundan bu mümkündür.
r (t ) 1 ( ( x1 (0), x2 (0),.., xn (0)))
dan
x (0) x
1
0 2
1
( x2 (0) x20 ) 2 ... ( xn (0) xn0 ) 2 2
eşitsizliğini sağlayan ( x1 (0), x2 (0),.., xn (0)) başlangıç şartı ve t için r(t)< olacak şekilde bir
vardır. Kararlılığın ispatı yapılmış oldu. Şimdi asimptotik kararlılığın ispatını verelim.
Hipotezden
d
( ( x1 (t ), x2 (t ),..., xn (t ))) <0
dt
dır. Bu yüzden
t ( x1 (t ), x2 (t ),..., xn (t ))
fonksiyonu azalan ve alttan sıfırla sınırlanan bir fonksiyondur. Buradan
L= lim ( x1 (t ), x2 (t ),..., xn (t ))
t
dir. Buradan
r (t ) 1 ( ( x1 (0), x2 (0),.., xn (0))) 0
t iken ispat tamamlanmış olur. Yada
L>0 dır ve ( x1 (t ), x2 (t ),..., xn (t )) orijinden pozitif bir uzaklığa sahiptir. Buradan
d
( ( x1 (t ), x2 (t ),..., xn (t ))) A2 t verir. Bu sonuç >0 ifadesi ile çakışır. O
dt
zaman L=0 olmalıdır.
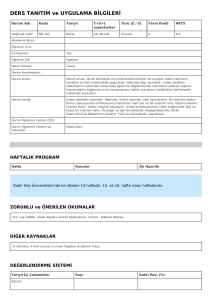
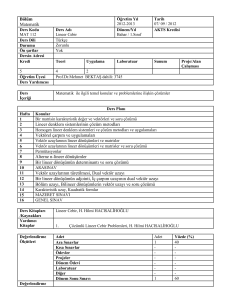
ġekil 3. Kararlı ve kararsız denge noktaları için faz portreleri
Örnek 2
dx1
x2 x22 x1
dt
dx2
x1
dt
(7)
Lineer olmayan denklem sistemini ele alalım. Sistemimin kritik noktalarını bulalım. (0,0)
noktası kritik noktadır. Sistemi lineerliştermek için Jacobian’ı alınır ise (8) ile verilen denklem elde
edilir.
F1
f x1
x F2
x
1
F1
x2 x22
F2 1
x2
1 2 x2 x1
0
Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
(8)
f
A
x
(0,0)
x22
1
1 2 x2 x1
0 1
0
(0,0) 1 0
(9)
dır. A matrisinin özdeğerleri 1, 2 i olduğu görülür. Burada (0,0) noktası lineer sistem için kararlı
merkez noktadır. Buradan lineer olmayan sistem için herhangi bir şey söylemeyiz. O zaman uygun
bir Lyapunov fonksiyonu bulalım. Ve Lyapunov teorilerini kullanarak kararlılığını inceleyelim.
x12 x22
2
fonksiyonunu alalım.
F1
F2
x1 x2 x12 x22 x1 x2 x12 x22
x1
x2
(10)
dir. <0 alınırsa fonksiyonu Lyapunov fonksiyonudur. Teorem 1.2.2’den (0,0) noktası kararlıdır.
Vektör alanı ve çözüm eğrisini Şekil 4 ve Şekil 5’de gösterilmiştir.
Şekil 4. (7) Sisteminin =-2 için vektör alanı ve çözüm eğrisi
ġekil 1’in Maple Kodu:
alfa:=-2;
phaseportrait([D(x)(t)=-y(t)+alfa*(yt)^2)*x(t),D(y)(t)=x(t)],[x(t),y(t)],t=-2..2,{[0,0,1],[1,0,0],[0,0,1],[-1,0,0],[1,0,1],[2,0,0],[0,0,2],[-2,0,2],[2,2,-1],[1,2,2],[2,3,2],[3,0,-2],[2,3,1]},x=-3..3,y=3..3,arrows=slim,linecolour=black,stepsize=0.005);
ġekil 4’den de görüleceği gibi <0 için (0,0) noktası kararlı noktadır.
ġekil 5. (7) Sisteminin =2 için vektör alanı ve çözüm eğrisi
ġekil 17’nin Maple Kodu:
alfa:=2;
phaseportrait([D(x)(t)=-y(t)+alfa*(y(t)^2)*x(t),D(y)(t)=x(t)],[x(t),y(t)],t=2..2,{[0,0,1],[1,0,0],[0,0,-1],[-1,0,0],[1,0,1],[2,0,0],[0,0,2],[-2,0,2],[2,2,-1],[1,2,2],[2,3,2],[3,0,2],[2,3,1]},x=-3..3,y=-3..3,arrows=slim,linecolour=black,stepsize=0.005);
Şekil 5’den de görüldüğü gibi >0 için (0,0) noktası kararsız noktadır.
Örnek 3 (Basit sarkaç)
m
o
ġekil 6. Basit sarkaç
Şekil 6 da görüldüğü gibi, L uzunluğundaki bir çubuğun ucuna bağlı, ileri geri sallanan bir
m kütlesinden oluşan basit sarkacı ele alalım. Çubuğun
t
zamanına bağlı saat yönünün zıt yönünde
dikey yönde yaptığı t açısı ile m kütlesinin konumunu belirleyebiliriz. Mekanik enerjinin
korunumu yasasına göre, m kütlesinin potansiyel ve kinetik enerjilerinin toplamı sabit olduğu
gerçeğinden yola çıkarak, yay uzunluğu(O’dan m ’ye kadar olan dairesel yay boyunca uzaklık)
s L , kütlenin hızı v
ds
d
ve
L
dt
dt
kinetik enerji
1 2 1 ds 1 2 d
mv m mL
.
2
2 dt
2
dt
2
T
2
(11)
Kütlenin ulaşacağı en alt nokta O’dur. h uzaklığı ise h L L cos L(1 cos ) dir. Bu durumda
kütlenin V potansiyel enerjisi, kütlenin ağırlığı mg ile O’dan daha yukarıda olan kütlenin dikey
yüksekliğinin çarpımıdır.
Potansiyel enerji,
V mgh mgL(1 cos ) .
(12)
Kinetik Enerji+Potansiyel Enerji=C(sabit olması gerektiğinden)
1 2 d
mL
mgL(1 cos ) C olur. Bu eşitliğin her iki tarafının t’ye göre türevi alınır ise
2
dt
2
mL2
d
dt
d 2 g
2 d
ile bölünür ise
dt 2 L sin 0 ve eşitliğin her iki tarafı mL
dt
d 2 g
dt 2 L sin 0
(13)
sönümsüz salınım denklemi elde edilir. (13) denklemine ortamın sürtünme direnci( sönüm terimi)
ilave edilir ise,
d 2 k d g
dt 2 m dt L sin 0
(14)
Sönümlü alınım denklemi elde edilir. (14) denkleminde, x1 , x2 seçilerek diferensiyel denklem
sistemine dönüştürülür ise (15) denklem elde edilir.
dx1
x2
dt
dx2
g
k
sin x1 x2
dt
L
m
(15)
Lineer olmayan denklem sistemini ele alalım. Sistemimin kritik noktalarını bulalım. (0,0) ve , 0
noktaları kritik noktalardır. Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
F1
f x1
x F2
x
1
F1
0
x2
g
F2 cos x1
L
x2
1
k
m
(16)
Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
f
A
x
(0,0)
0
1
0
g
g
cos x1 k
L
m (0,0) L
dır. A matrisinin özdeğerleri A I 0 2
dır. Tüm g , L, m, k 0 için Re i
1
k
m
k
g
k
0, 1,2
m
L
2m
(17)
2
1 k 4g
2 m
L
k
0 olur. Bu yüzden (0,0) noktasında lineer sistem
2m
asimptotik kararlıdır. O zaman uygun bir Lyapunov fonksiyonu bulalım. Lyapunov fonksiyonunu
enerji
yaklaşımından,
kinetik
ve
potansiyel
enerjileri
toplamından
KE PE
1 2
mv mgh
2
1 2 d
mL
mgL(1 cos ), x1 , x2
2
dt
1
mL2 x22 mgL 1 cos x1
2
2
(18)
alabiliriz. Lyapunov teorilerini kullanarak kararlılığını inceleyelim.
F ( x )
T
x1
T
F1 ( x) F2 ( x)
x2
mgL sin x1
mL x2 x2
2
g
k
sin x1 x2
L
m
T
(19)
kL2 x22
dir. k , L 0 alınırsa fonksiyonu Lyapunov fonksiyonudur. Teorem 1.2.2’den (0,0) noktası
kararlıdır. Aynı zamanda asimptotik kararlıdır. Buradan, orjinin bir enerji Lyapunov fonksiyonu ile
kararlı denge noktası olduğu gösterilmiş oldu.
Şimdi de lineerleştirilmiş sistemin
, 0 noktasındaki
kararlılığını inceleyelim, lineerleştirilmiş
sistemin , 0 noktasındaki değeri
f
B
x
( ,0)
0
1
0
g
g
cos x1 k
m ( ,0) L
L
dır. B matrisinin özdeğerleri A I 0 2
1
k
m
k
g
k
0, 1,2
m
L
2m
(20)
2
1 k 4g
2 m
L
dır. Tüm g , l , m 0 ve k 0 için açık sağ yarı düzlemde bir özdeğer vardır. Bu yüzden
noktasında lineer sistem kararsız olur.
Örnek 4
dx1
x2 ax1 x22
dt
dx2
x1 bx12 x2
dt
(21)
, 0
Lineer olmayan denklem sistemini ele alalım. Sistemimin kritik noktalarını bulalım. (0,0) noktası
kritik noktadır. Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
F1
f x1
x F2
x
1
F1
x2 ax22
F2 1 2bx1 x2
x2
1 2ax1 x2
bx12
(22)
Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
A
f
x
(0,0)
ax22
1 2bx1 x2
1 2ax1 x2
0 1
2
bx1
(0,0) 1 0
(23)
dır. A matrisinin özdeğerleri A I 0 2 1 0, 1,2 i dır. Bu yüzden (0,0) noktasında
lineer sistemin kararlı merkez noktasıdır, fakat nonlineer sistemin kararlılığı hakkında bir şey
söyleyemeyiz.. O zaman uygun bir Lyapunov fonksiyonu bulalım. Lyapunov fonksiyonunu enerji
yaklaşımından, kinetik ve potansiyel enerjileri toplamından
1 2
x1 x22
2
(24)
alabiliriz. Lyapunov teorilerini kullanarak kararlılığını inceleyelim.
F ( x )
T
x1
x1
T
F1 ( x) F2 ( x)
x2
x2 x2 ax1 x22
x1 bx12 x2
T
(25)
(a b) x12 x22
dir. Eğer a b alınırsa, 0 olur, fonksiyonu Lyapunov fonksiyonudur. Teorem 1.2.2’den (0,0)
noktası kararlıdır. Aynı zamanda asimptotik kararlıdır. Buradan, orjinin bir enerji Lyapunov
fonksiyonu ile kararlı denge noktası olduğu gösterilmiş oldu.
Eğer a b alınırsa, 0 olur, (0,0) noktası kararsız olur.
Örnek 5
dx1
x1 x2 x1 x12 x22
dt
dx2
x1 x2 x1 x12 x22
dt
(26)
Lineer olmayan denklem sistemini ele alalım. Sistemimin kritik noktalarını bulalım. (0,0) noktası
kritik noktadır. Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
F1
f x1
x F2
x
1
F1
x2 1 3x12 x22
F2 1 2 x1 x2
x2
1 2 x1 x2
1 3x22 x12
(27)
Lineerleştirilmiş sistemin (0,0) noktasındaki değeri
A
dır.
A
f
x
(0,0)
1 3x12 x22
1 2 x1 x2
matrisinin
özdeğerleri
1 3x x
1 2 x1 x2
2
2
2
1 (0,0)
1 1
1 1
A I 0 2 2 2 0, 1,2 1 i
(28)
dır.
Kompleks
özdeğerlerin reel kısmı negatif olduğundan, (0,0) noktasında lineer sistem ve nonlineer sistem
kararlıdır, aynı zamanda asimptotik kararlıdırlar.
KAYNAKLAR
1. Drazin, P. G., Nonlinear Systems, Cambridge University Pres, USA, 1992
2. Wiggins, S.,Introduction to Applied Nonlinear Dynamical Systems and Chaos,
Springer-Verlag, USA, 1990
3. Merdan, M.,İki Boyutlu Diferensiyel Denklem Sistemleri İçin Dallanma Analizi, Yüksek
Lisans Tezi, K.T.Ü., Fen Bilimleri Enstitüsü, Trabzon, 2003.