4. Ders
advertisement

ENTR0PĐ
Entropi kavramı, makroskopik görüş açısından (klasik termodinamik), mikroskopik görüş
açısından (istatistiksel termodinamik) ve informasyon görüş açısından (informasyon teorisi) olmak
üzere, üç şekilde ele alınabilir. Entropinin istatistiksel tanımlanması daha esaslıdır. Diğer
tanımlamalar ve entropi ile ilgili tüm özellikler ondan çıkartılabilmektedir. Entropi tanımına
geçmeden önce bazı hatırlatmalar yapalım.
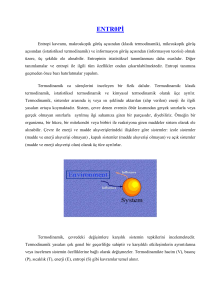
Termodinamik ısı süreçlerini inceleyen bir fizik dalıdır. Termodinamik: klasik
termodinamik, istatistiksel termodinamik ve kimyasal termodinamik olarak üçe ayrılır.
Termodinamik, sistemler arasında iş veya ısı şeklinde aktarılan (alıp verilen) enerji ile ilgili
yasaları ortaya koymaktadır. Sistem, çevre denen evrenin öbür kısmından gerçek sınırlarla veya
gerçek olmayan sınırlarla ayrılmış ilgi sahamıza giren bir parçasıdır, diyebiliriz. Örneğin bir
organizma, bir hücre, bir mitokondri veya birbiri ile reaksiyona giren maddeler sistem olarak ele
alınabilir. Çevre ile enerji ve madde alışverişlerindeki ilişkilere göre sistemler: izole sistemler
(madde ve enerji alışverişi olmayan) , kapalı sistemler (madde alışverişi olmayan) ve açık sistemler
(madde ve enerji alışverişi olan) olarak üç türe ayrılırlar.
Termodinamik, çevredeki değişimlere karşılık sistemin tepkilerini incelemektedir.
Termodinamik yasaları çok genel bir geçerliliğe sahiptir ve karşılıklı etkileşimlerin ayrıntılarına
veya incelenen sistemin özelliklerine bağlı olarak değişmezler. Termodinamikte hacim (V), basınç
(P), sıcaklık (T), enerji (E), entropi (S) gibi kavramlar temel alınır.
Termodinamiğin Yasaları:
•
Termodinamiğin sıfırıncı yasası: Đki termodinamik sistemin her biri üçüncü bir sistemle
termodinamik dengede ise aralarında da termodinamik dengededirler.
•
Termodinamiğin birinci yasası: Bir sistemin iç enerjisindeki artış, sisteme verilen ısı ile,
sistemin çevresine uyguladığı iş arasındaki farktır. Bu yasa "enerjinin korunumu" olarak
da bilinir.
•
Termodinamiğin ikinci yasası : “Entropi, bir termodinamik sistemden başka sistemlere iş
şeklinde aktarılması imkânsız enerji miktarı” olmak üzere, izole bir termodinamik sistemin
entropisi zamanla artmaktadır.
•
Termodinamiğin üçüncü yasası: Mutlak sıcaklıkta entropi sıfırdır. Bu yasa neden bir
maddeyi mutlak sıfıra kadar soğutmanın imkânsız olduğunu belirtir.
Termodinamiğin ikinci yasasında yer alan entropi, ısı enerjisinin tamamının mekanik işe
dönüştürülmesinin imkânsız olduğunu ifade eden termodinamik bir niceliktir. Sistemdeki
düzensizlik arttıkça, sistemin entropisi artar, yani sistemin faydalı iş verme kabiliyeti azalır. Bir su
damlası ısıtıldığında buharlaşır ve molekülleri daha düzensiz bir hal alır. T sıcaklığındaki bir cisme
∆Q kadarcık bir ısı verdildiğinde, entropisi ∆S=∆Q/T kadar artar. Entropi’ye, izole bir sistem
içindeki düzensizlik derecesi olarak da bakılabilir.
Termodinamiğin ikinci yasasına göre, izole sistemlerin entropisi artmaktadır. Entropinin
artması bir “geriye döndürülemez olay”dır. Kainatta her sistemin ve canlının entropisi devamlı
artmaktadır. Bu artış ilelebet devam etmeyecek, maksimuma erişince işe yarar enerji
kalmayacaktır. Đşe yarar enerjinin kalmaması demek, maddeler arasında ısı bakımından dengenin
sağlanması demektir.
Diğer yandan termodinamik aynı zamanda istatistiksel kavramlar kullanılarak da ifade
edilebilir. Mekanik (klasik veya kuantum) yasalarının istatistikle birleştirilerek kullanılması
sayesinde
geliştirilen
"istatistiksel
mekanik"
veya
"istatistiksel
termodinamik",
klasik
termodinamiğin tarif ettiği ancak açıklayamadığı bazı olgulara derin açıklamalar da getirmiştir.
Đstatistiksel mekanik; herbir atom ve molekülün mikroskopik özellikleriyle, günlük hayatta
karşılaşılan maddelerin makroskopik özellikleri arasında ilişki kurar. Bunu nesnelerin
termodinamik özelliklerini, moleküllerin spektroskopik (tayfölçüm) yöntemlerle alınmış verileri
kullanarak yapar. Đstatistiksel mekanikte bir sistemin dengede olması, onun bir makrodurumda
olduğunu (S) ifade etmekte olup, mikroskopik düzeyde ise olabilen tüm mikroskopik durumlar
arasında (sayıları Ω tane) geçişler yapmakta olduğunu ifade etmektedir. Böyle bir sistemin
entropisi, Boltzmann tarafından önerilen,
S = k log Ω
formülü ile hesaplanmaktadır. Entropi (S) bir sistemin girebileceği mikroskopik durumların
sayısına ( Ω ) bağlı olarak tanımlanmıştır. Burada k = 1.3806505 × 10−23 J K-1 Boltzmann sabiti’dir.
Sözü edilen mikroskopik durumların tanımı ve sayılması ise, sistemi oluşturan atomları tarif eden
temel mekanik yasalar kullanılarak yapılır.
Termodinamiğin çoğu uygulamasında, bir ya da daha çok değişken sabit tutulurken,
diğer değişkenlerin bunlara göre nasıl değiştiği incelenir ve bu da sistemin matematiksel
olarak (n sabit tutulmayan değişkenlerin sayısı olmak üzere) n boyutlu bir uzay olarak tarif
edilebileceği anlamına gelir. Đstatistiksel mekaniği fizik yasalarıyla birleştirerek, bu
değişkenleri birbirleri cinsinden ifade edecek "durum denklemleri" yazılabilir. Bunların en
basit ve en önemli olanlarından biri ise ideal gaz yasasıdır.
Bu denklemde R evrensel gaz sabiti'dir. Ayrıca istatistiksel mekanik terimleriyle bu denklem
şöyle yazılır:
Bu denklemde de k Boltzmann sabiti'dir.
Termodinamik değişkenler vasıtasıyla dört tane termodinamik potansiyel tanımlanabilir:
Sistemin Đç Enerjisi
Helmholtz Serbest Enerjisi
Gibbs Serbest Enerjisi
Entalpi
U : dU = T .dS + V .dP
Entalpi,özel bir fonksiyondur.Basınç sabit olduğu zaman bize ısıyı verir. Bu dört potansiyelin
diferansiyel denklemlerini ve zincirleme türev kuralını kullanarak bu dört potansiyel,
değişkenler ve birbirleri cinsinden yazılabilir:
E = U − P.V = A + T .S
A = E − T .S = G − P.V
G = A + P.V = U − T .S
U = G + T .S = E + P.V
Bu derste entropi kavramını enformasyon (informasyon, information) kavramı ile birlikte
kullanacağız. Enformasyon Teorisinin (Bilgi Kuramının) amacı bilginin elde edilmesi (haberin
alınması), aktarılması, işlenmesi ve saklanmasına ilişkin nicel kanunları incelemektir. Bilgi
kavramının tanımından önce, olasılık dağılımları üzerinde çeşitlilik ölçüsü olarak tanımlanan ve
istatistik entropi de denen entropi kavramının tanımını hatırlatmaya çalışacağız.
Entropi kavramı, kapalı bir kaptaki ideal bir gazın düzensizliğinin bir ölçüsü olarak 19.
yüzyılın sonlarında Boltzman tarafından ortaya atılan bir kavramdır. Bilgi kuramı 1940 ‘lı yıllarda
telekomünikasyona bağlı problemlerin çözümü sırasında ortaya çıkmıştır. Bilgi kuramının amacı
bilginin elde edilmesi, aktarılması, işlenmesi ve saklanmasına ilişkin kuralları incelemektir.
Bilginin aktarılması sürecindeki rasgelelik olgusu bu süreçlerin incelenmesinde istatistik
yöntemlerin kullanılmasını kaçınılmaz kılmaktadır.
Bilginin aktarılması için uygun biçimde kodlanmış olması gerekir. Bilgi minimum sayıda
sembol yardımıyla aktarılmalıdır. Bir maddesel sistemin durumu kesinkes biliniyorsa, bunun
hakkında aktarılan bilgi çokta değerli değildir. Buna göre, gelişigüzel olarak herhangi bir durumda
bulunan bir sisteme ilişkin alınan bir bilginin ne kadar değerli olduğunu ölçmeye yarayan bir kriter
olmalıdır. Buna sistemin “kararsızlık derecesi” denir. Bir sistemin kararsızlık derecesi sadece
mümkün olan durum sayısı ile değil; o durumda bulunma olasılıkları ile bağlantılıdır.
Gelişigüzellik (rasgelelik) içeren bir sistemin (X) bulunabileceği durumlar x1 , x2 ,..., xn olsun. Her
bir durumun olasılığı pi = P ( X = xi ) olmak üzere, sistem
x1 , x2 ,..., xn
X ≡
p1 , p2 ,..., pn
olarak gösterilsin. Sistem,
x1 , x2 ,..., xn ,...
X ≡
p1 , p2 ,..., pn ,...
biçiminde de olabilir. Kesikli durumlarda bulunabilen bir sistem (X) için durumlar x1 , x2 ,..., xn
olarak sayısallaştırılmış ise sistem bir X rasgele değişken olarak da ele alınabilir. X rasgele
değişkeninin olasılık fonksiyonu,
f X ( xi ) = P ( X = xi ) = pi , i = 1, 2,..., n
olsun. W = − log( f X ( X )) olarak tanımlanan W rasgele değişkeninin olasılık tablosu,
wi = − log( f X ( xi ))
− log( f X ( x1 ))
− log( f X ( x2 ))
⋯
− log( f X ( xn ))
− log p1
− log p2
⋯
− log pn
p1
p2
⋯
pn
wi = − log pi
fW ( wi ) = P (Wi = wi )
olmak üzere,
n
n
i =1
i =1
E (W ) = E (− log f X ( X )) = −∑ pi log f X ( xi ) = −∑ pi log pi
dır.
x1 , x2 ,..., xn
Kesikli durumlarda bulunabilen bir X ≡
sisteminin entropisi,
p1 , p2 ,..., pn
n
H ( X ) = −∑ pi log pi
i =1
olarak tanımlanır. Bu sistemi bir X rasgele değişkeni (rasgele değişkenin aldığı değerler
sistemin bulunabileceği durumlar) olarak da ele alabiliriz.
Entropi tanımındaki logaritmanın tabanı genellikle 2 olarak alınır. Bu durumda,
Durumlar
pi = P ( X = xi )
x1
p1 =
x2
1
2
p2 =
1
2
gibi bir sistemin entropisi,
2
1
1 1
1
H ( X ) = −∑ pi log 2 pi = −( log 2 + log 2 )
2
2 2
2
i =1
1
1
= −(− log 2 2 − log 2 2) = 1
2
2
olur. Entropinin tanımında logaritmanın tabanı 2 olarak seçildiğinde, eşit olasılıklı iki durumlu bir
sistemin entropisi, entropi ölçü birimidir. Birim entropiye “bit” denir. Örneğin, düzgün bir paranın
üç kez atılışındaki olasılıklara sahip, 8 durumlu bir sistemin entropisi,
YYY
YYT
YTY
TYY
YTT
TYT
TTY
TTT
1/8
1/8
1/8
1/8
1/8
1/8
1/8
1/8
1
1
H = − ( log 2 )8 = 3 (bit)
8
8
dır. N tane eşit olasılıklı durum gösteren bir sistemin entropisi log 2 N bit’tir. Sadece bir durumda
bulunan bir sistemin entropisi sıfırdır.
Örnek 1 Bir X sistemi (rasgele değişkeni) ile ilgili durumlar ve bu durumlarda bulunma
olasılıkları aşağıdaki gibi olsun.
1, 2 , 3, 4
X ≡1 1 1 1
, , ,
4 4 4 4
Bu sitemin entropisi,
4
1
1 1
1 1
1 1
1
H ( X ) = −∑ pi log 2 pi = − log 2 − log 2 − log 2 − log 2 =2 (bit)
4
4 4
4 4
4 4
4
i =1
dir. Entropi hesabında sadece durumların olasılıkları önemlidir. Sistem gösteriminde durumları
yazmasak da olur.
1 3 3 1
X ≡ , , ,
8 8 8 8
sisteminin entropisi
4
1
1 3
3 3
3 1
1
H ( X ) = − ∑ pi log 2 pi = − log 2 − log 2 − log 2 − log 2 =1.8 (bit)
8
8 8
8 8
8 8
8
i =1
dir.
Dört durumlu başka bir
1
1 97 1
X ≡
,
,
,
100 100 100 100
sisteminin entropisi,
4
H ( X ) = −∑ pi log 2 pi = −
i =1
1
1
97
97
1
1
1
1
log 2
−
log 2
−
log 2
−
log 2
100
100 100
100 100
100 100
100
=0.24 (bit)
dir. Düzgün dağılım durumunda entropinin en fazla olduğuna dikkat edin.
Entropi tanımında iki tabanlı logaritma yerine e tabanlı logaritma da kullanılmaktadır.
n
n
i =1
i =1
−∑ pi ln pi = −∑ pi ln(2
log 2 pi
n
n
i =1
i =1
) = −∑ pi log 2 pi ln(2) = − ln(2)∑ pi log 2 pi
Entropi ölçü birimi bit olmak üzere, entropi tanımında iki tabanlı logaritma yerine e tabanlı
logaritma kullanılırsa ln(2) katsayısını göz önünde tutmak gerekir. Doğal logaritma ve e tabanlı
üslü ifadelerin türev ve integral hesaplamaları daha kolay olmaktadır. Bundan sonraki kısımda bir
x1 , x2 ,..., xn
X ≡
sisteminin entropisi,
p1 , p2 ,..., pn
n
H ( X ) = −∑ pi ln pi
i =1
olarak tanımlanacaktır.
Khinchin Teoremi: Sonlu sayıda durum gösteren bir sistemin entropisinin maksimum değeri
durum sayısının logaritmasına eşittir ve durum olasılıklarının eşit olduğu halde ortaya
çıkmaktadır.
Đspat: Sistemin n tane durumu olsun.
x1 , x2 ,..., xn
X ≡
,
p1 , p2 ,..., pn
i = 1, 2,..., n için pi > 0 ve
n
∑p
i =1
i
=1
sisteminin,
n
H ( X ) = H ( p1 , p2 ,..., pn ) = −∑ pi ln pi
i =1
entropisini maksimum değerini bulmak için,
n
Amaç :
max H ( p1 , p2 ,..., pn ) = − ∑ pi ln pi
i =1
n
Kısıtlar :
∑p
i =1
i
=1
pi > 0 , i = 1, 2,..., n
optimizasyon problemini ele alalım.
Problemi Lagrange çarpanları yöntemi ile çözmeye çalışalım. Lagrange fonksiyonu,
n
n
i =1
i =1
L = −∑ pi ln pi + λ (∑ pi − 1)
ve
∂L
= − ln pi − 1 + λ , i = 1, 2,..., n
∂pi
n
∂L
= ∑ pi − 1
∂λ i =1
olmak üzere, türevlerin sıfıra eşitlenmesiyle elde edilen denklem sistemi,
− ln p = 1 − λ
1
− ln p2 = 1 − λ
⋮
− ln p = 1 − λ
n
n
∑ pi = 1
i =1
olup, denklem sisteminin çözümü
p1 = p2 = ... = pn =
λ = 1 + ln
1
n
1
n
ve
n
1 1
1
max H ( p1 , p2 ,..., pn ) = −∑ ln = − ln = ln n
n
n
i =1 n
dır. Sonlu sayıda duruma sahip sistemlerde maksimum entropi, durum olasılıklarının eşit
olduğunda ortaya çıkmaktadır ve n durumlu bir sistemin maksimum entropisi ln n dir.
x1 , x2 ,..., xn
X =
sisteminin her durumu için belli bir enerji düzeyi (değeri) söz konusu
p1 , p2 ,..., pn
olsun. Sistem kendi durumlarında p1 , p2 ,..., pn olasılıkları ile bulunmaktadır. Sistemin enerji
düzeyleri ve bu düzeylerde bulunması olasılıkları,
E
E1
E2
...
En
f E ( Ei ) = P( E = Ei )
p1
p2
...
pn
olmak üzere enerji ortalaması, yani enerjinin beklenen değeri
n
µ E = ∑ Ei pi
i =1
dır.
Sonlu durumlu ve enerji düzeyleri E1 , E2 ,..., En olan sistemin ortalama enerjisi belli bir
n
değere eşit
∑E p
i =1
i
i
= µ E* olacak şekilde maksimum entropili sistem hangisidir ve entropisi nedir?
Başka bir ifade ile,
n
Amaç :
max H ( p1 , p2 ,..., pn ) = − ∑ pi ln pi
i =1
n
Kısıtlar :
∑p
i =1
i
=1
n
∑E p
i =1
i
i
= µ E*
pi > 0 , i = 1, 2,..., n
probleminin çözümü nedir?
Lagrange fonksiyonu,
n
n
n
i =1
i =1
i =1
L = −∑ pi ln pi + λ1 (∑ Ei pi − µ E* ) + λ2 (∑ pi − 1)
ve
∂L
= − ln pi − 1 + λ1 E1 + λ2 , i = 1, 2,..., n
∂pi
n
∂L
= ∑ Ei pi − µ E*
∂λ1 i =1
n
∂L
= ∑ pi − 1
∂λ2 i =1
olmak üzere, türevlerin sıfıra eşitlenmesiyle elde edilen denklem sistemi,
− ln p1 = 1 − λ1 E1 − λ2
− ln p = 1 − λ E − λ
2
1 2
2
⋮
− ln pn = 1 − λ1 En − λ2
n
E p = µ*
i i
E
∑
i =1
n
p =1
i
∑
i =1
veya
p = e1−λ1E1 −λ2
1
p = e1−λ1E2 −λ2
2
⋮
p = e1−λ1En −λ2
n
n
Ei pi = µ E*
i =1
n
pi = 1
i =1
∑
∑
olup, ilk n denklemin toplamından
1=
e
n
e1−λ −λ E
∑
i =1
1 i
2
λ2 −1
=
n
e− λ E
∑
i =1
1 i
n
λ2 − 1 = ln(∑ e
− λ1Ei
)
i =1
elde edilir.
n
µ E* = ∑ Ei pi =
e
λ2 −1
i =1
n
n
Ei pi ∑ e
∑
i =1
i =1
eλ2 −1
=
λ2 −1
n
pi Ei
eλ2 −1
=
e
∑
i =1
− λ1Ei
eλ2 −1
n
Ei
e−λ E Ei
∑
i =1
1
=
i
n
∑ e−λ1E
=−
i
∂ n − λ1Ei
ln e
∂λ1 i =1
∑
i =1
olmak üzere,
1−λ1Ei −λ2
pi = e
1−λ2 −λ1Ei
=e
−λ E
e−λ1Ei
e 1 i
= λ −1 = n
, i=1,2,...,n
− λ1Ei
e2
∑e
i =1
elde edilir. Buna göre,
H max = −
n
∑ pi ln pi
i =1
= λ2 − 1 + λ1µ E*
dır.
−λ1Ei
e
= − pi ln n
−λ1Ei
i =1
∑e
j =1
n
∑
n
=−
i =1
n
n
i =1
i =1
∑ pi ( ln e−λ1Ei − (λ2 −1) ) = (λ2 −1)∑ pi + λ1 ∑ pi Ei
x1 , x2 ,..., xn
Sonlu durumlu X ≡
gibi bir sistemin enerji düzeyleri E1 , E2 ,..., En olduğunda,
p1 , p2 ,..., pn
n
sistemin ortalama enerjisi belli bir
∑E p
i =1
i
i
= µ E* değerine eşit olacak şekilde maksimum
entropili sistemin durum olasılıkları
pi =
e
− λ1Ei
n
∑e
− λ1Ei
, i=1,2,...,n
i =1
dır. Gazların Kinetik teorisinden,
pi =
e
n
Ei
− kT
∑e
−
Ei
kT
, i=1,2,...,n
i =1
dir (T mutlak sıcaklığı ve k Boltzmann sabitini göstermektedir). Buna göre, sistemin
n
ortalama enerjisi belli bir
∑E p
i
i =1
i
= µ E* değerine eşit olacak şekilde maksimum entropili
sistemde enerji düzeylerinin olasılık dağılımı,
E
E1
f E ( Ei ) = P( E = Ei )
e
p1 =
...
E2
− E1
n
kT
∑e
−
Ei
kT
p2 =
i =1
e
n
− E2
kT
∑e
−
En
...
pn =
Ei
kT
e
n
En
− kT
∑e
−
Ei
kT
i =1
i =1
dır. Bu olasılık dağılımına Boltzmann Dağılımı denir.
Metropolis-Hastings Algoritmasında olduğu gibi uygulamalarda k sabiti göz ardı
edilip,
E
E1
E
f E ( Ei ) = P( E = Ei )
p1 =
e
n
− T1
∑e
i =1
...
E2
−
Ei
T
E
p2 =
e
n
− T2
∑e
−
Ei
T
i =1
dağılımı kullanılmaktadır. Bu dağılıma Gibbs dağılımı denir.
En
...
pn =
e
n
− En
∑e
i =1
T
−
Ei
T
Đki ya da daha çok sistemin bileşkesi olan sistemlerde entropi kavaramını ele alalım.
x1 , x2 ,..., xn
X ≡
p1 , p2 ,..., pn
ve
y1 , y2 ,..., ym
Y ≡
r1 , r2 ,..., rm
gibi iki sistem söz konusu olsun. Bu iki sistemin bileşkesi dendiğinde,
{( xi , y j ) : i = 1, 2,..., n , j = 1, 2,..., m}
kümesindeki durumlarda bulunabilen sistem anlaşılmaktadır. X ve Y gibi iki sistemin bileşkesi olan
sistemi ( X , Y ) biçiminde gösterelim. Bu sistemin ( xi , y j ) , i = 1, 2,..., n , j = 1, 2,..., m
durumlarında bulunması olasılıkları P ( X = xi , Y = y j ), i = 1, 2,..., n , j = 1, 2,..., m olsun. Bileşke
sistemin entropisi,
n
H ( X , Y ) = −∑
i =1
m
∑ P( X = x , Y = y ) ln P( X = x , Y = y )
j =1
i
j
i
j
olarak tanımlanmaktadır. Đki sistem birbirinden bağımsız, yani
P ( X = xi , Y = y j ) = P ( X = xi ) P (Y = y j )
olduğunda,
ln P ( X = xi , Y = y j ) = ln P ( X = xi ) + ln P (Y = y j )
olmak üzere,
H ( X , Y ) = H ( X ) + H (Y )
dır. Bağımsız iki sistemin bileşkesinin entropisi, sistemlerin entropi toplamlarına eşittir.
( X , Y ) gibi bileşik bir sistemde, X sisteminin xi durumunda olduğu bilinsin. X sisteminin
xi durumunda olduğu bilindiğinde Y sisteminin koşullu entropisi
m
Y = y j
Y = y j
H (Y / X = xi ) = −∑ P
ln P
X
=
x
X
=
x
i
i
j =1
olarak tanımlanır.
( X , Y ) gibi bileşik bir sistemde, Y sisteminin X sistemine koşullu toplam entropisi
n
H (Y / X ) = ∑ pi H (Y / X = xi )
i =1
olarak tanımlanmaktadır.
( X , Y ) bileşke sisteminde Y sistemi ile X sistemi bağımsız ise
n
n
m
Y = y j
Y = y j
H (Y / X ) = ∑ pi H (Y / X = xi ) = −∑ pi ∑ P
ln P
X
=
x
X
=
x
i
i
i =1
i =1
j =1
= −∑ pi ∑ P (Y = y j ) ln P (Y = y j ) = −∑ P (Y = y j ) ln P (Y = y j )
n
m
m
i =1
j =1
j =1
= H (Y )
dır.
( X , Y ) bileşke sisteminin entropisi için
H ( X , Y ) = H ( X ) + H (Y / X ) = H (Y ) + H ( X / Y )
Y = y j
yazılabilir ( P ( X = xi , Y = y j ) = P ( X = xi ) P
den kolayca elde edilir). Ayrıca,
X = xi
H ( X , Y ) ≤ H ( X ) + H (Y )
dır.
Dikkat edilirse iki bileşenli bir sistem, iki değişkenli bir rasgele vektör olarak ele alınabilir.
Bundan sonra, ( X , Y ) bileşke sistemi ile ( X , Y ) rasgele vektörü kavramlarını birbirinin yerine
kullanacağız. ( X , Y ) nin olasılık fonksiyonu
f X ,Y ( xi , y j ) = pij = P ( X = xi , Y = y j ) , i = 1, 2,..., n , j = 1, 2,..., m
olmak üzere ( X , Y ) sistemi, entropi açısından pij , i = 1, 2,..., n , j = 1, 2,..., m
olasılıkları ile
anlatılabilir, yani ( X , Y ) ≡ ( pij )n×m diyebiliriz. Buna göre; X , Y rasgele değişkenlerinin ortak
dağılımının entropisi ( X ve Y sistemlerinin bileşkesinin entropisi)
n
H ( X , Y ) = −∑
i =1
m
∑p
j =1
ij
ln pij
dır.
Örnek 2 a) ( X , Y ) gibi bileşik bir sistem (iki boyutlu rasgele vektör) ile ilgili durumlar ve bu
durumlarda bulunması olasılıkları aşağıdaki gibi olsun.
Y
X
x1
x2
y1
1/4
1/4
y2
1/4
1/4
Bu bileşke sistemin entropisi,
1 1 1 1 1 1 1 1
H ( X , Y ) = − ln − ln − ln − ln = ln 4 = 2 ln 2 = 2(bit )
4 4 4 4 4 4 4 4
olup, X sisteminin (X rasgele değişkeninin) entropisi,
1 1 1 1
H ( X ) = − ln − ln = ln 2 = 1(bit )
2 2 2 2
Y sisteminin (Y rasgele değişkeninin) entropisi
1 1 1 1
H (Y ) = − ln − ln = ln 2 = 1(bit )
2 2 2 2
olmak üzere,
H ( X , Y ) = H ( X ) + H (Y )
dır.
b) ( X , Y ) gibi bileşik bir sistem (iki boyutlu rasgele vektör) ile ilgili durumlar ve bu durumlarda
bulunması olasılıkları aşağıdaki gibi olsun.
Y
X
x1
x2
y1
1/8
3/8
y2
3/8
1/8
Bu bileşke sistemin entropisi,
1 1 3 3 3 3 1 1
1.2555
(bit) = 1.8113 (bit)
H ( X , Y ) = − ln − ln − ln − ln = 1.2555 =
8 8 8 8 8 8 8 8
ln 2
olup, X sisteminin (X rasgele değişkeninin) entropisi,
1 1 1 1
H ( X ) = − ln − ln = ln 2 = 1(bit )
2 2 2 2
Y sisteminin (Y rasgele değişkeninin) entropisi
1 1 1 1
H (Y ) = − ln − ln = ln 2 = 1(bit )
2 2 2 2
olmak üzere,
H ( X , Y ) ≤ H ( X ) + H (Y )
dır.
X sisteminin (rasgele değişkeninin) x1 durumunda olduğu bilindiğinde Y sisteminin (rasgele
değişkeninin) koşullu dağılımı
yj
y1
y2
Y = y j
P
X
=
x
1
1/4
3/4
ve koşullu entropisi,
2
1 1 3 3
Y = y j
Y = y j
H (Y / X = x1 ) = −∑ P
ln P
= − ln − ln = 0.562=0.811 (bit)
X
=
x
X
=
x
1
1
4 4 4 4
j =1
dır. Benzer şekilde X sisteminin (rasgele değişkeninin) x2 durumunda olduğu bilindiğinde Y
sisteminin (rasgele değişkeninin) koşullu entropisi,
2
3 3 1 1
Y = y j
Y = y j
H (Y / X = x2 ) = −∑ P
ln P
= − ln − ln = 0.562=0.811 (bit)
X = x2
X = x2
4 4 4 4
j =1
dır.
Y sisteminin X sistemine koşullu toplam entropisi,
2
1
1
H (Y / X ) = ∑ pi H (Y / X = xi ) = × 0.811 + × 0.811 = 0.811(bit )
2
2
i =1
dır.
Durum Uzayı Sürekli Olan Sistemlerin Entropisi
x1 , x2 ,..., xn
Kesikli durumlarda bulunabilen bir X ≡
sisteminin entropisi,
p
p
p
,
,...,
n
1
2
n
H ( X ) = −∑ pi ln pi
i =1
olarak tanımlandı. Bu sistemi bir X rasgele değişkeni (rasgele değişkenin aldığı değerler sistemin
bulunabileceği durumlar) olarak da ele alabileceğimizi söyledik. Uygulamada sürekli rasgele
değişkene benzeyen maddesel sistemler de söz konusu olmaktadır. Bu tür sistemlerin durumları
sayılamaz çokluktadır. Durumların birinden diğerine sürekli tarzda geçilir, ancak sistemin herhangi
bir durumda bulunma olasılığı sıfırdır, sürekli rasgele değişkenlerde olduğu gibi. Durumlarının
kümesi reel sayılar ile eşlenebilen sürekli bir X sisteminin (sürekli bir rasgele değişkenin) bir
aralıkta bulunması olasılığı, bir olasılık yoğunluk fonksiyonu yardımıyla,
P ( x1 < X < x2 ) = P ( x1 ≤ X ≤ x2 ) = P ( x1 < X ≤ x2 ) = P ( x1 ≤ X < x2 ) =
x2
∫ f ( x)dx
x1
olarak ifade edilebilir. Sürekli sistem kavramı, tıpkı sürekli rasgele değişken kavramı gibi bir
idealleştirmedir. Bir insanın boy uzunluğu sürekli bir rasgele değişkendir deriz, ama bu teorik
olarak doğrudur. Gerçekte bir insanın boyu 1 cm den daha küçük bir kesimle ölçülmez ve boy
ölçüleri hiçbir zaman 1 mm farkla ifade edilmez. Olsa olsa boylar 1 cm farkla birbirinden ayrılır.
Buna benzer biçimde, ölçmelerde bir duyarlılık sınırı kabul ederek, yani bir △ x değeri belirlenerek
sürekli sistem (sürekli rasgele değişken) kesikli sisteme (kesikli rasgele değişkene) indirgenebilir.
Örneğin sürekli sistemin durumları (sürekli rasgele değişkenin aldığı değerler) bir ( a, b ) ⊂ R
aralığında ise bu aralık, a = x1 < x2 < x3 < ... < xn = b , xi +1 = xi +△ x , i = 1, 2,3,..., n − 1 noktaları ile
olacak
( a, b ) = ( x1 , x2 ] ∪ ( x2 , x3 ] ∪ ( x3 , x4 ] ∪ ... ∪ ( xn −1 , xn ] ∪ ( xn , xn +1 )
şekilde ( x1 , x2 ] , ( x2 , x3 ] , ( x3 , x4 ] ,...., ( xn −1 , xn ] , ( xn , xn +1 )
aralıklarına
ayrılabilir. Bu
aralıkların kendileri sistem durumu olarak alınırsa karşımıza n durumlu kesikli bir sistem çıkar. ∆x
değeri yeterince küçük tutulduğunda,
P( xi < X ≤ xi +1 ) = P( xi < X ≤ xi + ∆x) =
xi + △ x
∫
x
f ( xi )dx ≈ f ( xi )∆x
i
olmak üzere,
entropsi,
( x1 , x2 ] , ( x2 , x3 ] , ( x3 , x4 ] ,...., ( xn −1 , xn ] , ( xn , xn +1 )
n
n
i =1
i =1
n
durumlarında bulunabilen sistemin
n
n
i =1
i =1
−∑ pi ln pi = − ∑ f ( xi )△ x ln ( f ( xi )△ x ) = − ∑ f ( xi )△ x ln f ( xi ) − ∑ f ( xi )△ x ln△ x
n
= −∑ f ( xi )△ x ln f ( xi ) − ln△ x∑ f ( xi )△ x
i =1
i =1
dır.
n
b
f ( xi )△ x ln f ( xi ) → ∫ f ( x) ln f ( x)dx
∑
i =1
△ x →0
a
n
b
i =1
a
△ x →0
→ ∫ f ( x)dx = 1
∑ f ( xi )△x
olmak üzere, yeterince küçük ∆x için
n
n
n
b
i =1
i =1
i =1
a
−∑ pi ln pi = − ∑ f ( xi )∆x ln f ( xi ) − ln ∆x∑ f ( xi )∆x ≈ −∫ f ( x)ln f ( x)dx − ln ∆x
dır.
Sürekli bir X sisteminin (sürekli bir rasgele X değişkeninin) entropisi, ölçme duyarlılığını
ifade eden ∆x değeri göz önünde tutularak,
H ∆x ( X ) = −
∫
D
f ( x)ln f ( x)dx − ln ∆x
X
olarak tanımlanmaktadır. DX kümesi X rasgele değişkeninin aldığı değerlrin kümesidir.
Sürekli bir sistemin,
H ∆x ( X ) = −
∫
D
f ( x)ln f ( x)dx − ln ∆x
X
entropi formülündeki birinci terim ∆x ‘den bağımsızdır. ∆x değeri sistem durumunun
belirlenmesindeki (ölçülmesindeki, gözlenmesindeki) yaklaşıklığı ifade eder.
Sürekli sistemler için entropi formülü daha basit bir biçimde,
H ∆x ( X ) = −
∫
f ( x)ln f ( x)dx − ln ∆x = − ∫ f ( x) ln[ f ( x)∆x]dx = E [ − ln[ f ( X )∆x]]
DX
DX
olarak da yazılabilir.
Örnek 3 a) X ∼ U (a, b) olduğunda,
H ∆x ( X ) = −
∫
b
1
1
b−a
ln
dx − ln ∆x = ln
b−a b−a
∆x
a
f ( x)ln f ( x)dx − ln ∆x = − ∫
DX
b) X ∼ N (0, σ X2 ) olduğunda,
H ∆x ( X ) = −
∫
∞
f ( x)ln f ( x)dx − ln ∆x = − ∫
−∞
DX
∞
1
x2
1 − 2σX2 x 2
dx + ln
e
2σ X2
2π
=
∫
−∞
=
1
+ ln
2
(
(
2πσ X
−
e
x2
2σX2
x
1
− 2
2σ X
ln
e
2πσ X
2
dx − ln ∆x
)
2πσ X − ln ∆x
)
2πσ X − ln ∆x
dır.
Örnek 4 Sürekli bir sistemin (rasgele değişkenin) olasılık yoğunluk fonksiyonu f X olduğunda
sistemin entropisi,
H ∆x ( X ) = −
∞
∫
f X ( x)ln f X ( x)dx − ln ∆x
−∞
dır.
Aşağıdaki,
f ( x) ≥ 0 , x ∈ R
∞
∫−∞ f ( x)dx = 1
∞
∫ xf ( x)dx = a
(a ∈ R ve a bir sabit sayı)
−∞
∞
∫ ( x − a)
−∞
2
f ( x)dx = b (b > 0 ve b bir sabit sayı)
özelliklerini sağlayan f fonksiyonları birer olasılık yoğunluk fonksiyonu olup, belirledikleri
dağılımların beklenen değer ve varyansları aynıdır. Beklenen değeri ve varyansı aynı olan sürekli
dağılımlar arasında entropisi en büyük olan dağılım hangisidir. Başka bir ifade ile,
∞
max(−
f
∫
f ( x)ln f ( x)dx − ln ∆x)
−∞
Kısıtlar: f ( x) ≥ 0 , x ∈ R
∞
∫
f ( x)dx = 1
−∞
∞
∫ xf ( x)dx = a
(a ∈ R ve a bir sabit sayı)
−∞
∞
∫ ( x − a)
−∞
2
f ( x)dx = b (b > 0 ve b bir sabit sayı)
optimizasyon probleminin çözümü nedir? Bu problem çözüldüğünde, ilginç bir şekilde karşımıza
beklenen değeri µ = a ve varyansı σ 2 = b olan N ( µ , σ 2 ) normal dağılımı çıkmaktadır.
X ve Y iki sürekli sistem (rasgele değişken) olsun. (X,Y) bileşik sisteminin, başka bir ifade
ile (X,Y) rasgele vektörünün olasılık yoğunluk fonksiyonu f X ,Y olsun. Ayrıca X ile Y bileşenlerinin
olasılık yoğunluk fonksiyonları f X , fY ve koşullu dağılımların olasılık yoğunluk fonksiyonları
f X / y , fY / x olsun. X ve Y ‘nin ölçme duyarlılıkları sırasıyla ∆x , ∆y olsun.
( X , Y ) bileşik sisteminin entropisi,
H ∆x∆y ( X , Y ) = E[− ln{ f ( X , Y )∆x∆y}]
olarak tanımlanmaktadır.
X ‘in x durumunda bulunduğu bilinirken Y ‘nin H (Y | x) kısmi koşullu entropisi
H ∆y (Y | x) = − ∫
∞
−∞
fY / x ( y ) ln fY / x ( y )dy − ln ∆y
ve H (Y | X ) ortalama koşullu entropi
H ∆y (Y | X ) = − ∫
∞
∫
∞
−∞ −∞
olarak tanımlanmaktadır.
f X ( x) fY / x ( y ) ln fY / x ( y )dxdy − ln ∆y
f X ,Y ( x, y ) = f X ( x). fY / x ( y )
eşitliğini dikkate alarak,
H ∆y (Y | X ) = − ∫
∞
∫
∞
−∞ −∞
= −∫
∞
∫
∞
−∞ −∞
f X ,Y ( x, y ) ln fY / x ( y )dxdy − ln ∆y
f X ,Y ( x, y ) ln{ fY / x ( y )∆y}dxdy
formülü elde edilir.
H ∆y (Y | X ) = E[− ln f (Y | X ) − ln ∆y ]
veya
H ∆y (Y | X ) = E[− ln{ f (Y | X )∆y}]
olarak yazılabilir.
( X , Y ) bileşik sisteminin entropisi,
H ∆x∆y ( X , Y ) = E[− ln{ f ( x, y )∆x∆y}]
olmak üzere,
f X ,Y ( x, y ) = f X ( x). fY / x ( y )
ifadesinden,
H ∆x∆y ( X , Y ) = E[− ln{ f ( x, y )∆x∆y}] = − ∫
∞
∫
∞
−∞ −∞
= −∫
∞
f X ,Y ( x, y ) ln{ f X ,Y ( x, y )∆x∆y}dxdy
∞
∫ f ( x, y ) ln{ f ( x) f ( y)∆x∆y}dxdy
= − ∫ ∫ f ( x, y ) ln{ f ( x)∆x}dxdy − ∫ ∫ f ( x, y ) ln{ f ( y )∆y}dxdy
= − ∫ f ( x) ln{ f ( x)∆x}dx − ∫ ∫ f ( x) f ( y ) ln{ f ( y )∆y}dxdy
= H ( X ) − ∫ f ( x) ∫ f ( y ) ln{ f ( y )∆y}dydx
−∞ −∞
∞
X ,Y
X
X ,Y
X
∞
−∞ −∞
∞
∞
−∞
X
X
−∞
∞
−∞ −∞
∞
∞
∆x
Y/x
X ,Y
Y/x
∞
−∞ −∞
X
Y /x
Y/x
∞
X
−∞
Y/x
Y /x
= H ∆x ( X ) + H ∆y (Y / X )
elde edilir. ( X , Y ) bileşik sistemin bileşenleri bağımsız olduğunda,
H ∆x∆y ( X , Y ) = H ∆x ( X ) + H ∆y (Y )
dır.
X1
X
2
Bileşen sayısı k ≥ 2 olmak üzere, k bileşenli bir X = sistemi (k boyutlu rasgele
⋮
Xk
vektörü) için entropi,
H ( X ) = − E f X ( X 1 , X 2 ,..., X k ) ln f X ( X 1 , X 2 ,..., X k )
larak tanımlanır. Bileşenler bağımsız olduğunda,
H ( X ) = H ( X 1 ) + H ( X 2 ) + ... + H ( X k )
dır. Genelde,
H ( X ) = H ( X 1 ) + H ( X 2 / X 1 ) + H ( X 3 / X 1 , X 2 ) + ... + H ( X k / X 1 , X 2 ,..., X k −1 )
dır. Sürekli durumda da yukarıdakilere benze tanımlamalar yapılabilir.