Sistem Özellikleri: Yönetilebilirlik, Gözlenebilirlik
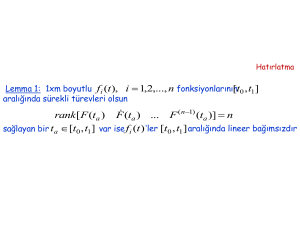
Hatırlatma
Yönetilebilirlik: x(t0 ) ilk koşulu verilen bir sistemi sonlu zaman
*
içinde x durumuna götüren bir u (t ) girişi
bulunabilinir mi?
Gözlenebilirlik: Sonlu zaman aralığında y (t ) çıkışlarını gözleyerek
sistemin ilk koşulu x(t0 ) belirlenebilir mi?
Lineer, zamanla değişmeyen sistemlerde, durum denklemlerini belirleyen
(A,B,C,D) matrislerinden faydalanarak bu sorular yanıtlanır.
Tanım: Yönetilebilirlik:
1) Durum denklemleri ile verilen dinamik sistem [t0 , t1 ] aralığında
yönetilebilir.
2) t0 anındaki herhangi bir x0 başlangıç durumunu t1 anındaki bir x1
durumuna götüren [t0 , t1 ] aralığında tanımlı bir giriş vardır.
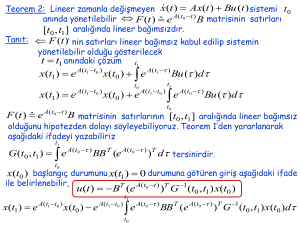
Teorem 3: Lineer zamanla değişmeyen x (t ) Ax(t ) Bu (t ) sistemi
ˆ rank[ B
yönetilebilir rankC
yönetilebilirlik matrisi
AB
...
A( n1) B] n
Hatırlatma
Tanım: Gözlenebilirlik
[t0 , t1 ] aralığındaki giriş-çıkış çiftinden x(t0 ) tek olarak belirlenebiliyorsa
sistem [t0 , t1 ] aralığında gözlenebilirdir.
Teorem 3: Lineer zamanla değişmeyen x (t ) Ax(t ) Bu (t ) sistemi
y (t ) Cx(t ) Du (t )
gözlenebilir
C
CA
n
rankO
ˆ rank
n 1
CA
gözlenebilirlik matrisi
0 0 p0
x 1 0 p1 x, y 0 0 1x
0 1 p2
ile verilen sistem hangi pi i=0,1,2 değerleri
için gözlenebilirdir?
1
0 0
0
x 0
0
1 x 0u ile verilen sistem hangi ai i=0,1,2 değerleri
için yönetilebilirdir?
a3 a2 a1 1
Frekans Tanım Bölgesinde Yönetilebilirlik ve Gözlenebilirlik
Varsayım: A’nın özdeğerleri lineer katsız 1, 2 ,..., n
D0
0
0 ... 0
1
b1
0
b
0
...
0
2
2
x 0
0 3 ... 0 x u
...
0
bn
0 n
y c1 c2 ... cn x
xi ’ler birbirinden .......
bi 0 ise xi .................................dolayısıyla sistem...........
ci 0 ise xi .................................dolayısıyla sistem...........
(*)
(*) sistemine ilişkin transfer fonksiyonu:
G ( s ) C ( sI A) 1 B
c1
c2
n
...
1
s
1
0
cn
0
0
0
...
1
s 2
0
...
0
1
s 3
...
...
0
b1
0 b
2
0
0 b
1 n
s n
0
ci bi
G( s)
s i
i 1
b j 0 ve/veya c j 0 ise sistem yönetilemez ve/veya gözlenemez
n
ci bi
G( s)
s i
i 1
i j
Lemma: ( A, B, C ) sisteminin özdeğerleri katsız ise, sistemin yönetilebilir
olması için gerek ve yeter koşul G( s) C ( sI A) 1 Btransfer fonksiyonunda
sıfır kutup sadeleşmesi olmamasıdır.
Gözlenebilirliği ve yönetilebilirliği ayrı ayrı incelemek istiyorsak:
Gc ( s) ( sI A) 1 B
Go ( s) C ( sI A) 1
F (t )
ˆ e A ( t 0 t ) B
~
Gözlenebilirlik için F (t )
ˆ Ce A(t0 t )
Yönetilebilirlik için
0 0 0
1 0
x 0 2 0 x 1 1u ,
0
1 3 1 0
1 1 0
y
x
1 0 0
t-tanım bölgesinde yönetebilirlik
ve gözlenebilirlik için baktığımız
matrisler
ile verilen sistemin yönetilebilirliğini ve
gözlenebilirliğini inceleyiniz?
3 0.5 0.5
1 1
x 2 2.5 0.5 x 2 4u ,
6 2.5 0.5
0
2
9 3 .5 1 .5
y
x
5
2
1
ile verilen sistemin yönetilebilirliğini ve
gözlenebilirliğini inceleyiniz?
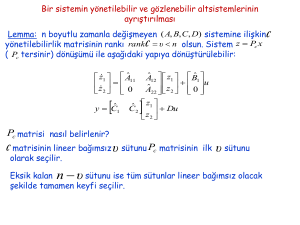
Bir sistemin yönetilebilir ve gözlenebilir altsistemlerinin
ayrıştırılması
Lemma: n boyutlu zamanla değişmeyen ( A, B, C, D) sistemine ilişkinC
yönetilebilirlik matrisinin rankı rankC υ n olsun. Sistem z Pc x
( Pc tersinir) dönüşümü ile aşağıdaki yapıya dönüştürülebilir:
ˆ
z1 A
11
z
2 0
y Cˆ1
ˆ z1 Bˆ
A
12
1 u
ˆ z2 0
A
22
z
Cˆ 2 1 Du
z2
Pc matrisi nasıl belirlenir?
C matrisinin lineer bağımsız υ sütunu Pc matrisinin ilk
olarak seçilir.
υ sütunu
Eksik kalan n υ sütunu ise tüm sütunlar lineer bağımsız olacak
şekilde tamamen keyfi seçilir.
Lemma: n boyutlu zamanla değişmeyen ( A, B, C, D) sistemine ilişkin O
gözlenebilirlik matrisinin rankı rankO n olsun. Sistem z Po x
( Po tersinir) dönüşümü ile aşağıdaki yapıya dönüştürülebilir:
ˆ
z1 A
0 z1 Bˆ1
11
ˆ u
z ˆ
ˆ
2 A21 A22 z 2 B2
z1
ˆ
y C1 0 Du
z2
Po matrisi nasıl belirlenir?
O matrisinin lineer bağımsız satırı Po matrisinin
seçilir.
ilk
satırı olarak
Eksik kalan n
satırı ise tüm satırlar lineer bağımsız olacak
şekilde tamamen keyfi seçilir.
Lemma: lineer zamanla değişmeyen ( A, B, C, D) sistemini aşağıdaki yapıya
dönüştüren z Px ( P tersinir) dönüşümü vardır.
ˆ
z1 A
11
z ˆ
2 A21
z3 0
z4 0
y Cˆ1
Öyle ki alt sistemler
0
0
ˆ
A
ˆ
A
13
ˆ
A
0
ˆ
A
33
ˆ
A
22
0
Cˆ 3
23
43
0 z1 Bˆ1
ˆ z 2 Bˆ
A
24
2 u
0 z3 0
ˆ
A44 z 4 0
z1
z
0 2 Du
z3
z4
Aˆ , Bˆ , Cˆ yönetilebilir ve gözlenebilir
Aˆ , Bˆ ,0 yönetilebilir, gözlenemez
Aˆ ,0, Cˆ yönetilemez, gözlenebilir
Aˆ ,0,0 yönetilemez, gözlenemez
11
22
33
44
1
1
2
3
Minimal Gerçekleme
( A, B, C, D) durum uzayı gösterimi verilen bir sistem için transfer
1
fonksiyonu matrisi G(s) C(sI A) B D tek olarak belirlenebilir.
Tersi söz konusuysa ne olur?
G(s) C(sI A)1 B D transfer fonksiyonu matrisi verildiğinde durum
uzayı gösterimi tek olarak belirlenebilir mi?
Farklı boyutlarda G (s ) ‘i sağlayan sonsuz tane durum uzayı gösterimi vardır.
Amaç: Durum uzayı gösteriminin boyutu ile sistemin yönetilebilirliği,
gözlenebilirliği arasındaki ilişkiyi incelemek.
Tanım: (minimal gerçekleme) G (s ) transfer fonksiyonu matrisine karşılık
düşen n boyutlu durum uzayı gösterimi ( A, B, C, D) ‘e, eğer G (s ) ‘in boyutu
n’den küçük bir gerçeklemesi yoksa minimal gerçekleme denir.
Dikkat!!!!! Minimal gerçekleme tek değildir.
ˆ
z1 A
11
z
ˆ
A
2
21
z3 0
z4 0
0
ˆ
A
ˆ
A
13
ˆ
A
0
ˆ
A
33
ˆ
A
22
0
23
43
0 z1 Bˆ1
ˆ
ˆ
A24 z 2 B2
u
0 z3
0
ˆ z4 0
A
44
z1
z
y Cˆ1 0 Cˆ 3 0 2 Du
z3
z4
Bu sistem için G(s) C(sI A) 1 B D transfer fonksiyonu matrisini
hesaplayalım.
G ( s ) Cˆ1
0
Cˆ 3
ˆ
sI A
11
ˆ
A
21
0
0
0
0
ˆ
sI A
22
0
0
ˆ
A
13
ˆ
A
23
ˆ
sI A
33
ˆ
A
43
0
ˆ
A
24
0
ˆ
sI A44
1
Bˆ1
ˆ
B2 D
0
0
ˆ ) 1 Bˆ D
G( s) Cˆ1 ( sI A
11
1
Teorem 4: G (s ) transfer fonksiyonu matrisinin ( A, B, C, D) gerçeklemesi
minimaldir ( A, B, C, D) gözlenebilir ve yönetilebilirdir.