Bir sistemin yönetilebilir ve gözlenebilir altsistemlerinin
ayrıştırılması
Lemma: n boyutlu zamanla değişmeyen ( A, B, C, D) sistemine ilişkinC
yönetilebilirlik matrisinin rankı rankC υ n olsun. Sistem z Pc x
( Pc tersinir) dönüşümü ile aşağıdaki yapıya dönüştürülebilir:
ˆ
z1 A
11
z
2 0
y Cˆ1
ˆ z1 Bˆ
A
12
1 u
ˆ z2 0
A
22
z
Cˆ 2 1 Du
z2
Pc matrisi nasıl belirlenir?
C matrisinin lineer bağımsız υ sütunu Pc matrisinin ilk
olarak seçilir.
υ sütunu
Eksik kalan n υ sütunu ise tüm sütunlar lineer bağımsız olacak
şekilde tamamen keyfi seçilir.
Lemma: n boyutlu zamanla değişmeyen ( A, B, C, D) sistemine ilişkin O
gözlenebilirlik matrisinin rankı rankO n olsun. Sistem z Po x
( Po tersinir) dönüşümü ile aşağıdaki yapıya dönüştürülebilir:
ˆ
z1 A
0 z1 Bˆ1
11
ˆ u
z ˆ
ˆ
2 A21 A22 z 2 B2
z1
ˆ
y C1 0 Du
z2
Po matrisi nasıl belirlenir?
O matrisinin lineer bağımsız satırı Po matrisinin
seçilir.
ilk
satırı olarak
Eksik kalan n
satırı ise tüm satırlar lineer bağımsız olacak
şekilde tamamen keyfi seçilir.
Lemma: lineer zamanla değişmeyen ( A, B, C, D) sistemini aşağıdaki yapıya
dönüştüren z Px ( P tersinir) dönüşümü vardır.
ˆ
z1 A
11
z ˆ
2 A21
z3 0
z4 0
y Cˆ1
Öyle ki alt sistemler
0
0
ˆ
A
ˆ
A
13
ˆ
A
0
ˆ
A
33
ˆ
A
22
0
Cˆ 3
23
43
0 z1 Bˆ1
ˆ z 2 Bˆ
A
24
2 u
0 z3 0
ˆ
A44 z 4 0
z1
z
0 2 Du
z3
z4
Aˆ , Bˆ , Cˆ yönetilebilir ve gözlenebilir
Aˆ , Bˆ ,0 yönetilebilir, gözlenemez
Aˆ ,0, Cˆ yönetilemez, gözlenebilir
Aˆ ,0,0 yönetilemez, gözlenemez
11
22
33
44
1
1
2
3
Minimal Gerçekleme
( A, B, C, D) durum uzayı gösterimi verilen bir sistem için transfer
1
fonksiyonu matrisi G(s) C(sI A) B D tek olarak belirlenebilir.
Tersi söz konusuysa ne olur?
G(s) C(sI A)1 B D transfer fonksiyonu matrisi verildiğinde durum
uzayı gösterimi tek olarak belirlenebilir mi?
Farklı boyutlarda G (s ) ‘i sağlayan sonsuz tane durum uzayı gösterimi vardır.
Amaç: Durum uzayı gösteriminin boyutu ile sistemin yönetilebilirliği,
gözlenebilirliği arasındaki ilişkiyi incelemek.
Tanım: (minimal gerçekleme) G (s ) transfer fonksiyonu matrisine karşılık
düşen n boyutlu durum uzayı gösterimi ( A, B, C, D) ‘e, eğer G (s ) ‘in boyutu
n’den küçük bir gerçeklemesi yoksa minimal gerçekleme denir.
Dikkat!!!!! Minimal gerçekleme tek değildir.
ˆ
z1 A
11
z
ˆ
A
2
21
z3 0
z4 0
0
ˆ
A
ˆ
A
13
ˆ
A
0
ˆ
A
33
ˆ
A
22
0
23
43
0 z1 Bˆ1
ˆ
ˆ
A24 z 2 B2
u
0 z3
0
ˆ z4 0
A
44
z1
z
y Cˆ1 0 Cˆ 3 0 2 Du
z3
z4
Bu sistem için G(s) C(sI A) 1 B D transfer fonksiyonu matrisini
hesaplayalım.
G ( s ) Cˆ1
0
Cˆ 3
ˆ
sI A
11
ˆ
A
21
0
0
0
0
ˆ
sI A
22
0
0
ˆ
A
13
ˆ
A
23
ˆ
sI A
33
ˆ
A
43
0
ˆ
A
24
0
ˆ
sI A44
1
Bˆ1
ˆ
B2 D
0
0
ˆ ) 1 Bˆ D
G( s) Cˆ1 ( sI A
11
1
Teorem: G (s ) transfer fonksiyonu matrisinin ( A, B, C, D) gerçeklemesi
minimaldir ( A, B, C, D) gözlenebilir ve yönetilebilirdir.
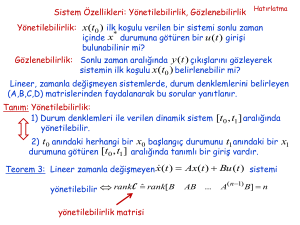
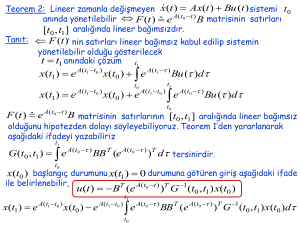
Kararlılık
x (t ) Ax (t ) Bu (t )
y (t ) Cx(t ) Du (t )
Sıfır giriş kararlılığı x (t ) Ax(t ), x(t0 ) x0
Tanım: (Denge noktası) x f (x) sisteminin x(t ) xd , t t0 sabit
çözümleri, sistemin denge noktalarıdır.
xd nasıl belirlenir?