")
ZORLANMIŞ TİTREŞİMLER
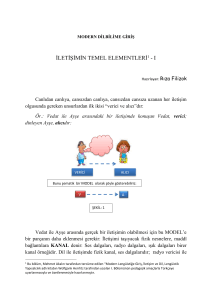
Mühendislik sistemlerine farklı formlarda kuvvetler etki etmektedir.
Bu farklı formlarda en sık rastlanan ise harmonik zorlama formudur.
Dönel makinalardaki kütle dengesizlikleri harmonik zorlamaların
temel nedenidir.
f ( t ) F0 sin t
F md e 2
15
md
X(t)
e θ
5
Genlik (N)
ω
10
m
0
-5
-10
k
c
t
-15
0
0.1
0.2
0.3
Zaman (sn)
0.4
0.5
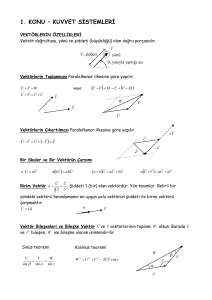
Bununla birlikte mühendislik sistemleri üzerinde sıklıkla etkili
olan diğer bir zorlama tipi de periyodik zorlamalardır. Fourier
serileri ve dönüşümleri kullanılarak, periyodik fonksiyonları bir
dizi harmonik fonksiyonun toplamı şeklinde ifade etmek mümkündür.
Zorlamanın bir dizi harmonik fonksiyonun toplamı olduğu bilgisi
kullanılarak, doğrusal (lineer) sistemlerin periyodik zorlamalara
verdiği cevabın, sistemin periyodik zorlamayı oluşturan her bir
harmonik zorlamaya verdiği cevapların toplamı olduğu söylenebilir.
10
Periyodik zorlama
0
-10
0
0.05
0.1
0.15
0.2
0.25
0.3
10
n
f (t ) a 0 a i sin it bi cos it
i1
0
-10
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.05
0.1
0.15
0.2
0.25
0.3
10
0
-10
10
0
-10
Zaman (sn)
Periyodik zorlamayı oluşturan
harmonik bileşenler
Sönümsüz Zorlanmış Titreşimler (Harmonik Zorlama):
Yandaki
tek
serbestlik
dereceli
sistem
üzerine
ω
zorlama frekansında harmonik
bir kuvvet etki etmektedir.
Newton’un
2.
yasası
kullanılarak hareket denklemi
aşağıdaki
gibi
ifade
edilebilir.
f(t)=F0sinωt
m
x(t)
k
kx F0 sin t mx
mx kx F0 sin t
x 2n x
F0
sin t
m
Yukarıdaki 2. mertebeden diferansiyel denklem için
genel çözüm homojen ve özel çözümlerin toplamı şeklinde
ifade edilebilir.
x(t ) x h (t ) x ö (t )
Homojen çözüm ilk şartlar etkisi ile elde edilen çözümdür
ve başlangıç şartlarına bağlı olarak
x h (t) A1 cos n t A2 sin n t
olarak ifade edilmişti. Özel çözümü elde
zorlama tipinde bir çözüm kabul edilebilir.
,
etmek
için
x ö (t ) X sin t
olduğu kabul edilerek, kabul edilen çözümün
diferansiyel denklemde yerine konulur ise
türevleri
x ( t ) X cos t
x(t ) 2X sin t
X sin t
2
2n X sin
F0
t sin t
m
denklemin her iki tarafı ile
1
2
n
2
2
2n
1
2n
2
n
F0
X
m
çarpılır ise
1
m
2n k
F0 1
X
2
m n
2
F
m
0
1
X
r
(Frekans Oranı)
2
n
m k
n
F0
X
1
k
2
X
F
0
1
r
2
1 r
k
Başlangıç şartları sıfırdan farklı bir sistem için harmonik
zorlama altındaki genel çözüm;
x ( t ) A1 cos n t A 2 sin n t
F0
k
2
1
n
sin t
Genel çözümdeki A1 ve A2 katsayıları başlangıç şartlarından
elde edilebilir.
x 0 A1 cos n 0 A 2 sin n 0
F0
k sin 0 A =x
1
0
2
1 r
F0
x 0
F0 k
k
r
x 0 n A1 sin n 0 n A 2 cos 0
cos 0 A 2
2
n
1 r2
1 r
F0
x 0
F0 k
k sin t
x ( t ) x 0 cos n t
r
sin
t
n
2
1 r
1 r2
n
0.5
0
-0.5
x h (t )
0
0.5
1
1.5
2
2.5
3
0.3
0
-0.3
x ö (t)
0
0.5
1
1.5
2
2.5
3
1
x(t)
0
-1
m=20 kg
k=2000 N/m
ω=15 rad/sn
x0=0.05 m
v0=0.2 m/sn
0
0.5
1
1.5
Zaman (sn)
2
2.5
3
n
k
2000
100 10 rad / s
m
20
Başlangıç şartları sıfır ise çözüm xö(t) formunda harmonik
bir cevap olacaktır. Frekans oranına bağlı olarak yer
değiştirme genlikleri çizilir ise
X
1
F0
1 r2
k
10
5
X
F0 / k
1
0
-5
-10
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
10
X
F0 / k
5
1
0
n
Frekans oranına bağlı olarak aşağıdaki durumlar geçerlidir.
0
1
n
durumunda yer değiştirme zorlama ile aynı
yöndedir. (in-phase)
F(t) [N]
500
ω=5 rad/s
ωn=10 rad/s
0
-500
0
0.5
1
1.5
2
2.5
3
In-Phase cevap
0.4
x(t) [m]
0.2
0
-0.2
-0.4
0
0.5
1
1.5
Zaman (sn)
2
2.5
3
1
n
1
n
cevap sonsuza gider.
(REZONANS)
durumunda yer değiştirme zorlama ile zıt yöndedir. (anti-phase)
f(t) [N]
500
0
-500
0
0.5
1
1.5
2
0
0.5
1
Zaman (sn)
1.5
2
x(t) [m]
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
Anti-Phase cevap
Örnek:
Şekilde verilen kiriş üzerinde
dolayı kirişe etki eden kuvvet
f ( t ) 300 sin 40t
bulunan
elektrik
motorundan
(N) şeklindedir.
F0
t
m
bir
Çelik malzeme E=200 GPa
Motor kütlesi m=250 kg.
20 mm
3m
400 mm
Bu
kuvvet
etkisi
altında
motorun
bulunduğu
noktadaki
yer
değiştirme genliklerini hesaplayınız. Motor kirişin ortasındadır.
Kiriş kütlesi ihmal edilebilir değerdedir.
Kiriş orta noktasındaki direngenlik
192EI
k
L3
0.4 * 0.023
2.666x10 7 (m 4 )
Kiriş alan atalet momenti I
12
192 * 200x109 * 2.666x107
k
379259 ( N / m).
3
3
Motor kiriş
ediliyor)
sisteminin
doğal
frekansı
(kiriş
kütlesi
ihmal
k
379259
n
38.95 (rad / sn )
m
250
Zorlama frekansı 40 rad/sn’dir. Bu
değiştirme anti-phase durumundadır.
durumda
zorlama
ile
Yer değiştirme genliği
X
F0
300 379259
k
0.01446 (m) 14.46 (mm )
2
2
40
1
1
38
.
95
n
yer
Sönümlü Zorlanmış Titreşimler (Harmonik Zorlama):
f(t)=F0sinωt
Şekilde verilen tek serbestlik
dereceli
harmonik
zorlama
etkisindeki sönümlü bir sistem
için hareket denklemi aşağıdaki
gibi yazılabilir.
m
x(t)
k
mx cx kx F0 sin t
Sönüm oranı için
c
2mn
ifadesi kullanılarak
hareket denklemi şu şekilde de yazılabilir.
x 2n x
2n x
F0
sin t
m
x ö (t ) x(t ) X sin t
c
kabul edilerek,
konur ise.
çözümün
türevleri
diferansiyel
denklemde
yerine
x (t ) X cost
x(t ) 2X sin t
2X sin t 2n X cost 2n X sin t
F0
sin t
m
Trigonometrik açılımlardan yararlanılarak
sin t sin t cos sin cos t
cost cos t cos sin t sin
2 X sin t cos 2 X sin cos t 2n X cos t cos 2n X sin t sin 2n X sin t cos
2n X sin cos t
F0
sin t
m
cos 2 sin
2
n
2n
F0
cos X sin t sin t
m
sin 2 cos sin X cos t 0
2
2
n
n
1
F0
2 2n sin cos X m
n
2
n
2
1
2
n
2 cos
2
n
2
F0
sin 1 2 cos X
2
k
n
n
2 cos
n
2
n
2
n
sin X 0
2 sin X 0
1
1
2
2
2n cos n sin X 0 2
2
n
n
2
2
cos 1 2 sin
n
n
2r
tan
2
1 r
2 r 2 1 r 2
2
2 r
1 r 2
sin
2r
2r
2
1 r
2 2
cos
1 r2
2r
2
1 r
2 2
2r
2r
2r
2
1 r
2 2
1 r2
2r 1 r
X
F0
2
2
2
r
1
r
k
2
2 2
2
1 r
X F0
k
2
2 2
2r 1 r
2
1
2r
2 r
tan
2
1 r
1
2
1 r
2 2
Rezonans durumu incelenir ise;
Rezonans durumunda genlik en büyük değere sahiptir. En
büyük genliğin elde edildiği frekans değerine REZONANS
FREKANSI adı verilir. Bu frekans değerinde cevap genliği
eğrisinin türevi sıfıra eşittir.
X
d
F0
k
dr
0*
2r 2 1 r
r 2 1 0
2
2
R n 1 2 2
2 2
0.5
2r
2
2r 2 1 r
r
8 2 r 4r 4r 3
2 2
1 r
2 2
0
1 2 2
n
0.707
ve
daha
sonrası
için
rezonans tepesi gözlenmez.
Rezonansdaki genlik değerini hesaplamak için
genlik oranı ifadesinde yerine konulur ise
X
F
0
k
bulunan
1
2 1 2
R
elde edilir. Küçük sonüm oranları için Rezonans Genliği
X
F
0
k
1
2
R
olarak elde edilir.
r
değeri
Tek serbestlik dereceli bir sistemin frekansa bağlı cevap genliklerini hesaplamak için aşağıdaki program notepad programında
yazılarak txt formatında kaydedilir. ANSYS’de çalıştırılır. Farklı model parametreleri için (kütle, direngenlik, sönüm) cevap
genlikleri incelebilir.
/prep7
et,1,mass21
et,2,combin14
r,1,0,40
r,2,200000,200
n,1,0,0,0
n,2,0,1,0
type,1
real,1
e,2
type,2
real,2
e,1,2
eplot
/solu
antype,3
d,all,ux,0
d,all,uz,0
d,1,uy,0
f,2,fy,-100
harfrq,0,60
nsubst,60
kbc,1
solve
/post26
nsol,2,2,uy
plvar,2
f(t)=F0sinωt
dof1_harm.txt
m
x(t)
k
c
Kütle Dengesizliğinden Kaynaklanan Kuvvetler İle Oluşan Titreşimler:
Kütle
dengesizliği
hemen
hemen
tüm
dönel
makinalarda
karşılaşılan temel bir problemdir. Şekilde kütle dengesizliği
ile uyarılan tek serbestlik dereceli bir sistem görülmektedir.
mx cx kx m d e2 sin t F0 sin t
x(t) X sin t
x (t ) X cost x(t ) 2X sin t
c
k
md e2
x x x
sin t
m
m
m
2
m
e
x 2n x 2n x d
sin t
m
2
m
e
2 X sin t 2n X cost 2n X sin t d
sin t
m
Trigonometrik eşitlikler kullanılarak
2 X sin t cos 2 X sin cos t 2n X cos t cos 2n X sin t sin 2n X sin t cos
2n X sin cos t
md e 2
sin t
m
sinωt ve cosωt terimlerinin katsayıları oluşturularak
md e2
cos 2n sin cos X sin t
sin t
m
2
2
n
sin 2 cos sin X cos t 0
2
2
n
n
1
2n
2
m
e
2n sin 2n 2 cos X d
m
2
m d e 2
2 sin 1 2 cos X
2
m
n
n
n
1
2n
1
2n
2 cos
2n
n
1
sin X 0
2
2n
2
2 cos 1 2 sin
n
n
2 r
tan
1 r2
sin
sin
cos
ve
2r
2r
2
1 r
için değerler yerine konur ise
cos
2 2
2r
2
2 2
2r 1 r
1 r2
2r
2
2
1 r
1 r
2r 1 r
2 2
2
2
2 2
X md e r 2
2
m
X
md e
m
r
2
2r 1 r
2
2 2
2r 1 r
2
2 2
r2
2r
2
1 r
2 2
Rezonans durumundaki r oranını bulmak için genlik ifadesinin r’ye
göre türevi alınıp sonuç sıfıra eşitlenir ise,
X
d
md e m 2
dr
r
2r
2
1 r
2 2
İşlemler yapılır ise REZONANS durumu için r oranı
r rez
1
1 2 2
n rez
R
n
1 2 2
Bu frekans genlik ifadesinde yerine konulur ise REZONANS genliği için
X
1
2
md e m rez 2 1
1 r 2 8 2 r 4r 4r 3
0
2
2 3 2r 2 1 r 2
Küçük sönüm oranları için
X
1
md e m rez 2
Zemine İletilen Kuvvet
Harmonik kuvvet etkisi altındaki bir mekanik sistem, hareket
sırasında yay ve amortisörde oluşan reaksiyon kuvvetlerini
bağlantı noktalarından zemine iletir. Zorlama kuvveti genliği
ve zemine iletilen kuvvet arasındaki ilişki aşağıdaki şekilde
elde edilebilir.
Harmonik zorlama etksindeki düzenli rejim titreşimleri dikkate
alınarak harmonik yer değiştirme ve buna ait hız ifadesi ile;
x(t) X sin t
x (t ) X cost
Ftr kX sin t cX cost
Aşağıdaki trigonometrik ilişki kullanılarak
z(t ) A sin t B cos t A B sin t
2
2
B
tan
A
1
Dolayısı ile zemine iletilen kuvvet aşağıdaki şekilde ifade edilebilir.
Ftr ( t ) FTR sin t '
Zemine iletilen kuvvet genliği üzerinde durulduğu için FTR genliği
c22X 2
FTR kX cX kX 1 2 2
kX
2
FTR kX 1
2
2
c22
(k
2 2
n
m
2
2
mn )
2
2
2
c r
2 r
FTR kX 1 2 kX 1 2n 2
n
m n
FTR kX 1 2r
2
X
Fk
2r
2
1 r
2 2
FTR
F
1 2r
2
2r 2 1 r 2 2
T
(Kuvvet iletim Oranı, Transmissibility)
Kütle Dengesizliğinden Kaynaklanan Kuvvetlerin Zemine İletimi
Harmonik bir kuvvet zorlaması durumu için zemine iletilen kuvvet
ifadesi
FTR kX 1 2r
2
formülü ile ifade edilmişti.
Kütle dengesizliğinden kaynaklanan kuvvetler ile zorlanan tek
serbestlik dereceli bir sistem için kütleye ait yer değiştirme
genliği X
mde 2
r
m
X
2r
2
1 r
idi.
2 2
Bu yer değiştirme genliği yukarıda verilen zemine iletilen kuvvet
ifadesinde yerine konur ise
FTR
k
mde 2
2
2
r 1 2r
2
2
m
e
r
1
2
r
n
d
m
2
2
2r 1 r 2
2r 2 1 r 2 2
FTR
2
m d e n
r 2 1 2r
2
2r 2 1 r 2 2
Kütle dengesizliğinden kaynaklanan kuvvetlerin zemine iletilmesi,
frekans oranı ve sönüm oranına bağlı olarak aşağıdaki şekilde
değişmektedir.
Harmonik Zemin Zorlaması
x1ö ( t )
2n Y
2
n
2 2
2 n 2
sin t
x ö2 ( t )
2 n Y
2
n
2 2
2 n 2
cost
tan
x ö (t ) n Y
2 n
1
2n
2
tan
1
1 r2
2n 22
2
n
2 2
2r
2 n 2
X
sin t Y
1
1 2r 2
1 r
2 2
2r 2
tan
2
2
1 4 1 r
X
Y
2r 3
1 2r 2
1 r
2 2
2r 2
(Hareket iletim oranı)
sin t
Hareket iletim oranı ile Kuvvet iletim oranı ifadelerinin aynı olduğu görülebilir. Hareket iletim
oranının frekans oranı ve sönüm oranına bağlı değişimi aynen Kuvvet iletim oranı için
bahsedilen şekildedir.
Harmonik formdaki zemin yer değiştirmesi dolayısı ile ile m
kütlesine etki eden kuvvet frekans oranı ve sönüm oranına bağlı
olarak aşağıdaki şekilde değişmektedir.
")