İçindekiler
BİRİNCİ BÖLÜM
Matrisler
Martislerde İşlemler
Bir Matrisin Transpozesi
Bir Matrisin Tersi
Elemanter Satır Operasyonları
Bir Matrisin Tersinin Bulunması
Bölüm Sonu Tekrar Testi (Matrisler)
İKİNCİ BÖLÜM
Determinant
Determinant
Determinantın Özellikleri
Kofaktör Yardımıyla Determinant Hesabı
Ek Matris
Bölüm Sonu Tekrar Testi (Determinant)
ÜÇÜNCÜ BÖLÜM
Lineer Denklem Sistemleri
Lineer Denklem Sistemleri
Lineer Homojen Denklem Sistemi
Matrisinin Tersi Kullanılarak Denklem Sistemlerinin Çözülmesi
Cramer Kuralı
Bölüm Sonu Tekrar Testi (Lineer Denklem Sistemleri)
DÖRDÜNCÜ BÖLÜM
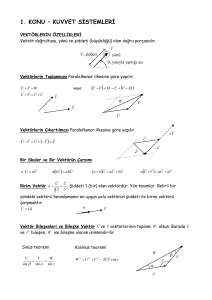
Vektörler
Vektörlerde İşlemler
Dik Koordinat Sistemi
Dik Koordinat Sisteminde İki Nokta Arasındaki Uzaklık
Vektörlerin Dik Koordinat Sisteminde Gösterilmesi
Birim Vektör
Vektörlerin Düzlem Geometride Uygulamaları
Lineer Bağımsızlık ve Taban
İç Çarpım
12
18
21
27
31
37
41
48
56
71
75
81
85
88
90
93
98
102
104
107
111
112
117
127
Öklid İç Çarpımının Geometrik Uygulamaları
Doğrultman Kosinüsleri
Vektörel Çarpım ve Geometrik Uygulamaları
Karma Çarpım ve Geometrik Uygulamaları
Rn Uzayında Vektörel Çarpım
Bölüm Sonu Tekrar Testi (Vektörler)
BEŞİNCİ BÖLÜM
Uzayda Doğru Denklemi
Bir Noktası ve Doğrultusu Verilen Doğrunun Denklemi
İki Noktası Verilen Doğrunun Denklemi
Bir Noktası Bilinen ve İki Vektöre Dik Olan Doğrunun Denklemi
R3 Uzayında İki Doğrunun Birbirine Göre Durumları
Bir Noktanın Bir Doğruya Uzaklığı
Aykırı İki Doğru Arasındaki Uzaklık
Bölüm Sonu Tekrar Testi (Uzayda Doğru Denklemi)
ALTINCI BÖLÜM
Uzayda Düzlem Denklemi
Düzlem Denklemi
Üç Noktası Verilen Düzlem Denklemi
İki Doğruya Paralel, Bir Noktası Bilinen Düzlemin Denklemi
İki Düzlemin Birbirine Göre Durumları
Bir Doğru ile Bir Düzlemin Birbirine Göre Durumları
İçindeki İki Doğrusu Bilinen Düzlemin Denklemi
Bir Doğrunun Bir Düzlem Üzerindeki Dik İzdüşümünün Denklemi
Bir Noktanın Bir Düzleme Uzaklığı
Paralel İki Düzlem Arasındaki Uzaklık
Eksenleri Kestiği Koordinatları Verilen Düzlem Denklemi
Düzlem Demeti
İzdüşüm Noktasının Bulunması
Simetri - Yansıma
Bölüm Sonu Tekrar Testi (Uzayda Düzlem Denklemi)
YEDİNCİ BÖLÜM
Kutupsal Koordinat Sistemi
Kutupsal ve Dik Koordinatların Birbirine Çevrilmesi
Kutupsal Koordinatlarda İki Nokta Arasındaki Uzaklık
Kutupsal Koordinatlarda Üçgenin Alanı
130
144
149
156
162
167
175
178
180
182
187
191
195
197
200
202
203
206
210
211
212
214
215
216
217
219
225
229
232
232
Kutupsal Koordinatlarda Bir Eğrinin Grafiğinin Çizilmesi
Bölüm Sonu Tekrar Testi (Kutupsal Koordinat Sistemi)
SEKİZİNCİ BÖLÜM
Konikler
Çemberin Analitik İncelemesi
Bir Doğru İle Bir Çemberin Birbirine Göre Durumları
Üç Noktası Bilinen Çember Denklemi
Bir Çember Üzerindeki Bir Noktadan Çizilen Teğetin Denklemi
Bir Çembere Dışındaki Bir Noktadan Çizilen Teğetlerin Denklemi
Değme Kirişinin Denkleminin Bulunması
Bir Noktanın Bir Çembere Göre Kuvveti
Çemberlerin Birbirine Göre Durumu
İki Çemberin Dik Kesişmesi
Kuvvet Ekseni
Çember Demeti
Elips
Merkezil Elips ile Bir Doğrunun Birbirine Göre Durumları
Elipsin Doğrultmanları
Hiperbol
Hiperbolün Asimptotları
Merkezil Hiperbol ile Bir Doğrunun Birbirine Göre Durumları
Hiperbolün Doğrultmanları
Parabol
Koniklerin Parametrik Denklemleri
Koniklerin Kutupsal Denklemleri
Bölüm Sonu Tekrar Testi (Konikler)
DOKUZUNCU BÖLÜM
Koordinat Dönüşümleri
Noktanın Ötelenmesi
Eksenlerin Ötelenmesi
Noktanın Döndürülmesi
Eksenlerin Döndürülmesi
Afin Dönüşüm
Bölüm Sonu Tekrar Testi (Koordinat dönüşümleri)
ONUNCU BÖLÜM
Koniklerin Genel Denklemi
233
239
244
247
249
251
253
255
256
258
260
261
263
265
270
273
278
280
283
285
288
290
292
295
301
303
307
313
316
319
Öteleme Yapılarak x ve y’li terimlerin yok edilmesi
Dönme Yapılarak xy ’li terimin yok edilmesi
Bölüm Sonu Tekrar Testi (Koniklerin Genel Denklemi)
ONBİRİNCİ BÖLÜM
Eğri ve Yüzey Denklemleri
Eğrilerin ve Yüzeylerin Denklemleri
Küre Yüzeyi
Kürenin Parametrik Denklemi
Küre ve Doğru
Küre ve Düzlem
Bir Kürenin Teğet Düzleminin Bulunması
Silindir Yüzeyi
Koni Yüzeyi
Kuadratik Yüzeyler
Elipsoid
Eliptik Silindir
Eliptik Dik Koni
Tek Kanatlı Hiperboloid
Çift Kanatlı Hiperboloid
Eliptik Paraboloid
Hiperbolik Paraboloid
Parabolik Silindir
Hiperbolik Silindir
Dönel Yüzeyler
Bölüm Sonu Tekrar Testi (Eğri ve Yüzey Denklemleri)
ONİKİNCİ BÖLÜM
Uzayda Farklı Koordinat Sistemleri
Silindirik Koordinatlar
Küresel Koordinatlar
Kutupsal Koordinatlar
Kaynaklar
322
326
333
335
338
341
342
344
348
352
354
356
356
357
358
359
361
362
364
365
366
367
371
379
380
381
382
130
Analitik Geometri - Mustafa Özdemir
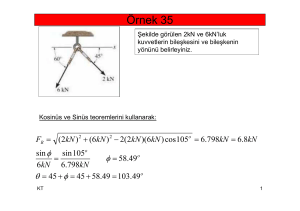
4.35 Alıştırma R4 uzayında verilen ~
x = (1, 2, 3, 4) , y
~ = (0, 3, 1, 2) ve ~
z = (1, 0, 2, −1)
vektörleri için aşağıdakileri hesaplayınız.
a) h~
x, y
~ i =? b) h~
x, ~
z i =? c) h~
x, y
~+~
z i =? d) h~
x + 3~
z, ~
x−y
~ i =?
Yanıt : a) 17 b) 3 c) 20 d) 19.
xi = h~
y, y
~ i = h~
z, ~
z i = 1 ise h~
x, y
~ i değerini
Örnek 4.40 ~
x+y
~+~
z = ~0, h~
x, ~
hesaplayınız.
Çözüm : ~
x+y
~+~
z = 0 eşitliğini sırasıyla ~
x, y
~ ve ~
z vektörleriyle çarpalım. Buna göre,
h~
x, ~
xi + h~
x, y
~ i + h~
x, ~
z i = 0 ⇒ h~
x, y
~ i + h~
x, ~
z i = −1
h~
y, ~
xi + h~
y, y
~ i + h~
y, ~
z i = 0 ⇒ h~
y, ~
xi + h~
y, ~
z i = −1
h~
z, ~
xi + h~
z, y
~ i + h~
z, ~
z i = 0 ⇒ h~
z, ~
xi + h~
z, y
~ i = −1
−1
elde edilir.
x, y
~i =
eşitliklerinden, üçüncüsü −1 ile çarpılıp taraf tarafa toplanırsa, h~
2
Öklid İç Çarpımının Geometrik Uygulamaları
Bu bölümde, Öklid İç çarpımının, geometride ne gibi kolaylıklar sağladığını, Öklid
iç çarpımını geometrik olarak nasıl yorumlayabileceğimizi göreceğiz. Öklid iç çarpımını
kullanarak, Rn uzayında açı ve uzunluğu içeren birçok problemi çözmemiz mümkündür.
Aşağıda, bunlardan örnekler vereceğiz.
Öklid İç çarpımı ile bir vektörün uzunluğu arasındaki ilişki.
~ = (u1 , u2 , ..., un ) vektörünün uzunluğunu
Daha önce Rn uzayında bir u
p
k~
uk = u21 + u22 + · · · + u2n
ile ifade etmiştik. Diğer taraftan, u
~ vektörünün kendisiyle iç çarpımı da,
h~
u, u
~ i = u21 + u22 + · · · + u2n
olduğundan,
p
k~
uk = h~
u, u
~i
sonucuna ulaşırız.
Örnek 4.41 ~
x = 2~
u+~
v ise k~
xk değerini, u
~ ve ~
v vektörlerinin normuna ve iç çarpımına bağlı olarak yazınız.
Çözüm : İç çarpımın özellikleri kullanılarak,
p
p
h~
x, ~
xi = h2~
u+~
v , 2~
u+~
vi
k~
xk =
p
4 h~
u, u
~ i + 2 h~
u, ~
v i + 2 h~
v, u
~ i + h~
v, ~
vi
=
q
4 k~
v k2 + 4 h~
u, ~
v i + k~
v k2
=
bulunur.
131
VEKTÖRLER
Örnek 4.42 k~
x+y
~ k = 5, k~
xk = 1 ve k~
x−y
~ k = 3 olduğuna göre, y
~ vektörünün
uzunluğunu bulunuz.
2
u, u
~ i bağıntısını ve iç çarpımın özelliklerini kullanacağız.
Çözüm : k~
uk = h~
k~
x+y
~ k2
= h~
x+y
~, ~
x+y
~ i = h~
x, ~
xi + h~
x, y
~ i + h~
y, ~
xi + h~
y, y
~i
2
2
x, y
~ i + k~
yk
= k~
xk + 2 h~
25 = 1 + 2 h~
x, y
~ i + k~
y k2
(*)
elde edilir. Diğer yandan,
k~
x−y
~ k2
= h~
x−y
~, ~
x−y
~ i = h~
x, ~
xi − h~
x, y
~ i − h~
y, ~
xi + h~
y, y
~i
2
2
x, y
~ i + k~
yk
= k~
xk − 2 h~
9 = 1 − 2 h~
x, y
~ i + k~
y k2
(**)
olduğundan, (∗) ve (∗∗) eşitlikleri taraf tarafa toplanırsa,
34 = 2 + 2 k~
y k2
eşitliğinden, k~
y k = 4 elde edilir. Yani, y
~ vektörünün uzunluğu 4 br’dir.
x+y
~ k = 6, k~
y k = 2 ve k~
x−y
~ k = 4 olduğuna göre, ~
x vektörünün
4.36 Alıştırma k~
uzunluğunu bulunuz.
√
Yanıt : 22.
2
2
k~
x+y
~ k − k~
x−y
~k
olduğunu kanıtlayınız.
4
4.37 Alıştırma h~
x, y
~i =
Öklid iç çarpımını kullanarak iki vektörün arasındaki açının bulunması.
4.7
Teorem
~
x ve y
~ , Rn uzayında iki vektör olsun. ~
x ve y
~ arasındaki açı θ ise,
cos θ =
h~
x, y
~i
k~
xk k~
yk
’dir.
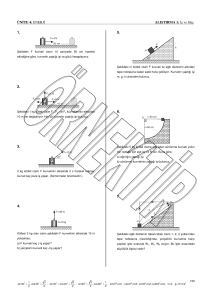
Kanıt : Rn uzayında, aralarındaki açı θ olan ~
x ve y
~ vektörlerini alalım. ~
x, y
~ ve ~
x−y
~ vektörleri şekildeki gibi
bir üçgen oluştururlar ve bu üçgenin kenarları k~
xk , k~
yk
ve k~
x−y
~ k uzunluğuna sahiptir. Şimdi, Kosinüs teoremini
uygulayacağız.
xk2 + k~
y k − 2 k~
xk k~
y k cos θ
k~
x−y
~ k2 = k~
G
y
θ
2
eşitliğinde, sol taraftaki k~
x−y
~ k normunu,
2
k~
x−y
~k
= h~
x−y
~, ~
x−y
~i
= h~
x, ~
xi − h~
x, y
~ i − h~
y, ~
xi + h~
y, y
~i
x, y
~ i + k~
y k2
= k~
xk2 − 2 h~
G G
x−y
G
x
132
Analitik Geometri - Mustafa Özdemir
şeklinde yazarsak,
2
2
2
x, y
~ i + k~
y k = k~
xk + k~
y k − 2 k~
xk k~
y k cos θ
k~
xk − 2 h~
eşitliğinde, sadeleştirmeler yapılarak,
elde edilir. Böylece,
h~
x, y
~ i = k~
xk k~
y k cos θ
cos θ =
h~
x, y
~i
k~
xk k~
yk
bulunur.
¥
Not : Öklid iç çarpımının en önemli geometrik yorumu, iki vektör arasındaki açıyı bulabilmemizi sağlamasıdır.
Örnek 4.43 Sıfırdan farklı iki vektörün dik olmasıyla, iç çarpımları arasında nasıl bir
bağıntı vardır?
x ve y
~ vektörlerini alalım. cos 90◦ = 0 olduğundan,
Çözüm : Aralarındaki açı 90◦ olan ~
h~
x, y
~i
=0
cos θ =
k~
xk k~
yk
eşitliğinden, h~
x, y
~ i = 0 elde edilir. Sonuç olarak, iki vektörün iç çarpımı 0 ise, bu iki
vektör birbirine dik olacaktır.
Örnek 4.44 ~
x = (1, 2, 3, 4, 5) vektörüyle y
~ = (2, −3, 5, 1, k) vektörü birbirine dik
ise k nedir?
Çözüm : ~
x⊥y
~ ise h~
x, y
~ i = 0 olmalıdır. Buna göre,
h~
x, y
~ i = 1 · 2 + 2 · (−3) + 3 · 5 + 4 · 1 + 5 · k = 5k + 15 = 0
eşitliğinden, k = −3 bulunur.
Örnek 4.45 ~
x = (1, 3, 0, 2) ve y
~ = (1, 0, 2, 3) vektörleri arasındaki açıyı bulunuz.
Çözüm : cos θ =
elde edilir.
1·1+3·0+0·4+2·3
h~
x, y
~i
1
√
= √
=
k~
xk k~
yk
2
1+9+4 1+4+9
olduğundan, θ = 60◦
4.38 Alıştırma ~
x = (1, 2, 3, 2, 1) ve y
~ = (3, 1, 2, 1, 2) vektörleri arasındaki açının
kosinüsünü bulunuz.
15
.
Yanıt : cos θ =
19
133
VEKTÖRLER
x = (1, 2, −3, 2, −1) ve y
~ = (3, k, 2, 1, 2) vektörleri birbirine dik ise
4.39 Alıştırma ~
k =?
Yanıt : k = 3/2.
4.40 Alıştırma R3 uzayında ~
x = (1, 2, 3) vektörüne dik olan 5 vektör yazınız.
4.41 Alıştırma R3 uzayında ~
x = (1, k, 2) , y
~ = (3, −1, m) ve ~
z = (n, 2, 2) vektörleri
ikişer olarak birbirlerine dik olduklarına göre, m, n ve k değerlerini bulunuz.
16
14
17
.
Yanıt : k = − , m = − , n =
5
5
5
4.42 Alıştırma R3 uzayında ~
x = (1, k, 2) , y
~ = (2, −1, m) ve ~
z = (n, 2, 1) vektörleri ikişer olarak birbirlerine dik olduklarına göre, m, n ve k değerlerini bulunuz.
det (~
x, y
~, ~
z ) =? Bu vektörler doğrultusundaki birim vektörlerin oluşturduğu matrisin bir
ortogonal matris olacağını gösteriniz.
Yanıt : k = −2, m = −2, n = 2.
Not ! Ortogonal bir matriste, tüm satır ve tüm sütun vektörleri birbirine diktir. Tüm
satır ve sütun vektörlerinin uzunluğu 1’dir.
⎡
⎤
−1 −1
1
1
1 ⎢ −1
1 −1
c ⎥
⎥ = matrisi bir ortogonal matris ise,
Örnek 4.46 A = ⎢
⎣
b
1 −1 ⎦
2 −1
−1 −1
a −1
a =?, b =?, c =?
Çözüm : hS1 , S2 i = 0 eşitliğinden, c = 1, hS1 , S3 i = 0 eşitliğinden, b = 1 ve son olarak,
hS1 , S4 i = 0 eşitliğinden, a = −1 elde edilir. Bu a, b, c değerleri için AAT = I olduğunu
görebilirsiniz.
⎡
⎤
1
4 a
1⎣
−4 b 4 ⎦ matrisi ortogonal olduğuna göre, a, b, c değer4.43 Alıştırma A =
9
8 −4 c
lerini bulunuz.
Yanıt : a = 8, b = −7, c = 1.
⎡
⎤
1 2 2
1
4.44 Alıştırma A = ⎣ 2 1 −2 ⎦ matrisi ortogonal olduğuna göre, a, b, c değer3
a b c
lerini bulunuz.
Yanıt : a = −2, b = 2, c = −1 veya a = 2, b = −2, c = 1.
134
Analitik Geometri - Mustafa Özdemir
Örnek 4.47 Eşkenar dörtgenin köşegenlerinin birbirine dik olduğunu vektörleri kullanarak kanıtlayınız.
Çözüm : Eşkenar dörtgenin aynı köşeden çıkan iki kenarını
~
x ve y
~ vektörleriyle gösterirsek, köşegenlerden biri ~
x−y
~,
diğeri ise ~
x+y
~ vektörü olacaktır. Buna göre, k~
xk = k~
yk
olduğuda göz önüne alınırsa,
x, y
~ i + h~
y, ~
xi − k~
y k2
h~
x+y
~, ~
x−y
~ i = k~
xk2 − h~
= 0
G G
x+ y
G
y
G G
x−y
G
x
elde edilir. Bu köşegenlerin birbirine dik olduğunu gösterir.
Örnek 4.48 ~
x = (1, 2, 3) vektörüyle aynı düzlemde bulunan birbirine dik iki vektör
bulunuz.
Çözüm : ~
x vektörünün bulunduğu düzlemde bulunan birbirine dik iki vektör y
~ ve ~
z
olsun. Buna göre, h~
y, ~
z i = 0 olmalı ve ~
x, y
~, ~
z aynı düzlemde olmalıdır. Aynı düzlemde
olan üç vektör lineer bağımlı olacağından, bu üç vektörün determinantı 0 olmalıdır. y
~
vektörünü rastgele bir vektör alabiliriz. y
~ = (1, 1, 1) olsun.
~
z = (a, b, c) diyelim. Buna göre,
1) h~
y, ~
z i = 0 ise a + b + c = 0 (∗) olmalıdır.
¯
¯
¯ 1 2 3 ¯
¯
¯
2) det (~
x, y
~, ~
z ) = 0 ise ¯¯ 1 1 1 ¯¯ = 2b − a − c = 0 (∗∗) olmalıdır.
¯ a b c ¯
Buna göre, (∗) ve (∗∗) eşitliklerinden, b = 0 ve a = −c bulunur. O halde, ~
z = (1, 0, −1)
alınabilir.
Rn uzayında herhangi iki vektörle oluşturulan paralelkenarın alanını, iç çarpım yardımıyla
nasıl hesaplayabileceğimizi aşağıdaki teoremle verelim.
Öklid iç çarpımını kullanarak alan hesaplamalarının yapılabilmesi.
4.8
Teorem
~
x ve y
~ , Rn uzayında iki vektör olsun. ~
x ve y
~ arasındaki açı θ olmak
x ve y
~ ile oluşturulan paralelkenarın alanı
üzere, ~
q
2
Alan (~
x, y
~ ) = h~
x, ~
xi h~
y, y
~ i − h~
x, y
~i
’dir.
135
VEKTÖRLER
Kanıt : Aralarındaki açı θ olan, ~
x ve y
~ vektörleriyle oluşturulan paralelkenarın alanını
Alan (~
x, y
~ ) = k~
xk k~
y k sin θ
√
h~
x, y
~i
olduğunu
ile bulabiliriz. sin θ = 1 − cos2 θ yazalım. Diğer yandan, cos θ =
k~
xk k~
yk
da kullanırsak,
s
h~
x, y
~ i2
Alan (~
x, y
~ ) = k~
xk k~
yk 1 −
2
2
k~
xk k~
yk
q
=
k~
xk2 k~
y k2 − h~
x, y
~ i2
q
=
h~
x, ~
xi h~
y, y
~ i − h~
x, y
~ i2
elde edilir. Üçgenin alanı için bu değer 2’ye bölünür.
¥
Örnek 4.49 ~
x = (1, 1, 2, 3) ve y
~ = (2, 3, 1, 1) vektörleriyle oluşturulan paralelkenarın alanını bulunuz.
q
x, ~
xi h~
y, y
~ i − h~
x, y
~ i2 eşitliğinden,
Çözüm : Alan (~
x, y
~ ) = h~
√
√
Alan (~
x, y
~ ) = 15 · 15 − 102 = 5 5
elde edilir.
Örnek 4.50 Köşelerinin koordinatları A (1, 1, 1, 0, 1) , B (1, 2, 3, 4, 3) ve
C (1, 2, 1, 1, 1) olan üçgenin alanını bulunuz.
Çözüm : Önce noktadan vektöre geçelim.
−−
→
−→
~
x = AB = B − A = (0, 1, 2, 4, 2) ve y
~ = AC = C − A = (0, 1, 0, 1, 0)
denilirse, üçgenin alanı :
Alan (ABC) =
bulunur.
1
2
q
1√
5
h~
x, ~
xi h~
y, y
~ i − h~
x, y
~ i2 =
25 · 2 − 52 =
2
2
Örnek 4.51 ~
x = (1, 1) ve y
~ = (3, 4) vektörleriyle oluşturulan paralelkenarın alanını
bulunuz.
q
√
2
x, ~
xi h~
y, y
~ i − h~
x, y
~ i = 2 · 25 − 72 = 1’dir.
Çözüm : Alan (~
x, y
~ ) = h~
136
Analitik Geometri - Mustafa Özdemir
4.45 Alıştırma ~
x = (0, 1, 0, 2, 2) ve y
~ = (2, 0, 0, 2, 1) vektörleriyle oluşturulan paralelkenarın alanını bulunuz.
√
Yanıt : 3 5.
4.46 Alıştırma Köşelerinin koordinatları A(1,1,1,0,1), B(1,2,3,4,3) ve C(1,2,1,1,1)
olan üçgenin alanını bulunuz.
Yanıt : 5/2.
x = (1, 2) ve y
~ = (2, 1) vektörleriyle oluşturulan paralelkenarın
4.47 Alıştırma ~
alanını bulunuz.
Yanıt : 3.
4.9
Teorem
Düzlemde köşelerinin koordinatları A (x1 , y1 ) , B (x2 , y2 ) ve
C (x3 , y3 ) olan üçgenin alanı
¯
¯ 1 x1
1 ¯¯
Alan (ABC) = ¯ 1 x2
2¯
1 x3
değerinin mutlak değeridir.
y1
y2
y3
¯
¯
¯
¯
¯
¯
−
−→
A
1. Kanıt : BA = y
~ = (x1 − x2 , y1 − y2 ) ve
−−→
BC = ~
x = (x3 − x2 , y3 − y2 ) ile gösterelim ve
G
q
y
1
2
Alan (ABC) =
h~
x, ~
xi h~
y, y
~ i − h~
x, y
~i
2
formülünü uygulayalım. Buna göre, uzun ve sıkıcı işlemθ
C
G
B
ler sonucunda,
x
³
´³
´
2
2
2
2
2
h~
x, ~
xi h~
y, y
~ i − h~
x, y
~i =
(x1 − x2 ) + (y1 − y2 )
(x3 − x2 ) + (y3 − y2 )
− ((x1 − x2 ) (x3 − x2 ) + (y1 − y2 ) (y3 − y2 ))
bulunur. Buradan,
= (x1 y2 − x2 y1 − x1 y3 + x3 y1 + x2 y3 − x3 y2 )
Alan (ABC) =
=
elde edilir.
2
2
1
(x1 y2 − x2 y1 − x1 y3 + x3 y1 + x2 y3 − x3 y2 )
2¯
¯
¯ 1 x1 y1 ¯
¯
¯
1¯
1 x2 y2 ¯¯
¯
2¯ 1 x y ¯
3
3
¥
137
VEKTÖRLER
2. Kanıt (Klasik Yöntem)
Yamukların alanlarını kullanarak,
A (ABC) = A (BM N A) +A (AN KC)
−A (BM KC)
y1
A
eşitliğinden sonuca ulaşabiliriz.
¶
µ
y1 + y2
A (BM N A) = (x1 − x2 )
y3
C
2
¶
µ
y1 + y3
A (AN KC) = (x3 − x1 )
B
y2
2
¶
µ
x1
x3
x2
y3 + y2
M
A (BM KC) = (x3 − x2 )
N
K
2
olduğu kullanılırsa,
1
(x1 y2 − x2 y1 − x1 y3 + x3 y1 + x2 y3 − x3 y2 )
Alan (ABC) =
2¯
¯
¯ 1 x1 y1 ¯
¯
1 ¯¯
1 x2 y2 ¯¯
=
¯
2¯
1 x3 y3 ¯
elde edilir.
Örnek 4.52 Düzlemde köşelerinin koordinatları A, B ve C olan üçgenin alanının
−−→ −−→ ¯¯
1 ¯¯
¯det(AB,AC)¯
2
değerine eşit olduğunu gösteriniz.
Çözüm : Üçgenin köşelerinin koordinatları A (x1 , y1 ) , B (x2 , y2 ) ve C (x3 , y3 ) olsun.
−→
−−
→
AB = (x2 − x1 , y2 − y1 ) ve AC = (x3 − x1 , y3 − y1 )
olduğundan,
−
−
→ −→ ¯¯
1 ¯¯
¯det(AB,AC)¯ =
2
=
=
¯
¯
1 ¯¯ x2 − x1 y2 − y1 ¯¯
2 ¯ x3 − x1 y3 − y1 ¯
1
(x1 y2 − x2 y1 − x1 y3 + x3 y1 + x2 y3 − x3 y2 )
2¯
¯
¯ 1 x1 y1 ¯
¯
¯
1¯
1 x2 y2 ¯¯
¯
2¯
1 x3 y3 ¯
= Alan (ABC)
elde edilir.
¥
138
Analitik Geometri - Mustafa Özdemir
Örnek 4.53 Köşelerinin koordinatları A (1, 1) , B (2, 3) ve C (3, 6) olan üçgenin
alanını hesaplayınız.
Çözüm : 3 farklı şekilde çözelim.
q
1
2
1. Yol (Rn de geçerli genel formül) (Alan (ABC)=
h~
x, ~
xi h~
y, y
~ i − h~
x, y
~i )
2
−
−
→
−→
~
x = AB ve y
~ = AC alabiliriz. Buna göre, ~
x = (1, 2) ve y
~ = (2, 5) olduğundan,
√
1
1
5 · 29 − 122 =
Alan (ABC) =
2
2
elde edilir.
¯
¯
¯ 1 x1 y1 ¯
¯
¯
1
2. Yol (Klasik Yöntem) (Alan (ABC) = ¯¯ 1 x2 y2 ¯¯)
2¯
1 x3 y3 ¯
¯
¯
¯ 1 1 1 ¯
¯
¯ 1
1
Alan (ABC) = ¯¯ 1 2 3 ¯¯ =
2¯
2
1 3 6 ¯
bulunur.
−
−
→ −→ ¯¯
1 ¯¯
¯det(AB,AC)¯)
2
¯
¯
1 ¯ 1 2 ¯¯ 1
Alan (ABC) = ¯¯
=
2 2 5 ¯ 2
3. Yol (Determinant) (Alan (ABC) =
olduğu görülür.
4.48 Alıştırma Köşelerinin koordinatları A (1, 2) , B (2, 3) ve C (3, 1) olan üçgenin
alanını 3 farklı yöntemi kullanarak hesaplayınız.
Yanıt :
3
.
2
4.49 Alıştırma Köşelerinin koordinatları A (0, 1) , B (6, 3), C (7, 6) ve D (1, 4) olan
paralelkenarın alanını hesaplayınız.
Yanıt : 16.
139
VEKTÖRLER
Örnek 4.54 Köşelerinin koordinatları A (1, 1, 1) , B (2, 2, 1) ve C (1, 3, 3) olan üçgenin çevrel çemberinin alanını hesaplayınız.
Çözüm : Öncelikle,
sin B
sin C
1
sin A
=
=
=
a
b
c
2R
formülünü kullanarak, çevrel çemberin yarıçapını bulalım. Bunun için üçgenin açılarından
birinin sinüsünü bulmak yeterli olacaktır.
−−
→
−→
x = AB = (1, 1, 0) ve y
~
~ = AC = 0
olduğundan,
√
2
3
h~
x, y
~i
1
= √ √ = ⇒ sin A =
cos A =
k~
xk k~
yk
2
2
2 8
q
√
bulunur. Buradan, a = |BC| = (−1)2 + 12 + 22 = 6 olduğundan,
√
a
6 √
=√ = 2
R=
2 sin A
3
bulunur ki, çevrel çemberin alanı :
Alan = πR2 = 2π
elde edilir.
4.50 Alıştırma R4 uzayında köşelerinin koordinatları A (1, 0, 1, 2) , B (1, 2, 3, 4) ve
C (4, 2, 3, 1) olan üçgenin çevrel çemberinin alanını hesaplayınız.
Yanıt :
27
π.
5
4.10
Teorem (Schwarz Eşitsizliği) ~x, y~ ∈ Rn vektörleri için, k~xk k~yk ≥ |h~x, y~i|
eşitsizliği sağlanır.
Kanıt : h~
x, y
~ i = k~
xk k~
y k cos θ olduğunu biliyoruz. |cos θ| ≤ 1 olduğundan,
elde edilir.
k~
xk k~
y k ≥ |h~
x, y
~ i|
¥
140
Analitik Geometri - Mustafa Özdemir
Not : Teorem 4.10’un kanıtında, Öklid iç çarpımı söz konusu olduğu için, h~
x, y
~i =
k~
xk k~
y k cos θ eşitliğini kullanarak, Schwarz eşitsizliğinin doğruluğu hemen görülebilmektedir. Fakat, Öklid iç çarpımı dışındaki, herhangi bir iç çarpım için de, bu eşitsizlik daima
doğrudur. Herhangi bir iç çarpım için bu eşitsizliğin doğruluğunun kanıtını Lineer Cebir
derslerine bırakıyoruz.3
4.11
Teorem (Üçgen Eşitsizliği) Bir üçgende, herhangi bir kenar, diğer iki kenarın toplamından küçük, farkından büyüktür.
Çözüm : Yandaki şekile göre,
G
y
|k~
xk − k~
y k| < k~
x−y
~ k < k~
xk + k~
yk
θ
olduğunu göstereceğiz.
i) k~
x−y
~ k < k~
xk + k~
y k olduğunu görelim.
k~
x−y
~ k2
G G
x−y
G
x
= h~
x−y
~, ~
x−y
~ i = h~
x, ~
xi − h~
x, y
~ i − h~
y, ~
xi + h~
y, y
~i
2
2
x, y
~ i + k~
yk
= k~
xk − 2 h~
2
2
≤ k~
xk + 2 |h~
x, y
~ i| + k~
yk
2
(Schwarz Eşitsizliğinden)
2
xk k~
y k + k~
yk
< k~
xk + 2 k~
2
= (k~
xk + k~
y k)
eşitsizliğinden, k~
x−y
~ k < k~
xk + k~
y k olduğu görülür.
3 Genel İspat : x veya y vektörlerinin herhangi birinin sıfır olması durumunda eşitlik olur ve teorem
doğrudur. x ve y sıfırdan farklı herhangi iki vektör olsunlar. Şimdi,
~
z=~
x−
~
x·y
~
y
~
y
~·y
~
vektörünü gözönüne alalım. Bu vektör, y vektörüne dik sıfırdan farklı bir vektör belirtir. İç çarpımın pozitif
tanımlılık özelliğine göre,
~
z·~
z≥0
olmalıdır. Buna göre,
z·z =
x·x−
x·y
x·y
y · x−
y
x−
y·y
y·y
(x · y) (y · x)
(x · y)2
(x · y) (x · y)
−
+
y·y
y·y
y·y
(x · y) (y · x)
(x · x) −
y·y
(x · x) (y · y)
2
eşitsizliğinden istenen elde edilir.
2
kxk kyk
≥
0
≥
0
≥
0
≥
(x · y)2
≥
(x · y)2
141
VEKTÖRLER
ii) |k~
xk − k~
y k| < k~
x−y
~ k olduğunu görelim.
k~
x−y
~ k2
= h~
x−y
~, ~
x−y
~ i = h~
x, ~
xi − h~
x, y
~ i − h~
y, ~
xi + h~
y, y
~i
x, y
~ i + k~
y k2
= k~
xk2 − 2 h~
2
2
≥ k~
xk − 2 |h~
x, y
~ i| + k~
yk
> k~
xk2 − 2 k~
xk k~
y k + k~
y k2
= (k~
xk − k~
y k)2
¥
eşitsizliğinden istenen elde edilir.
Örnek 4.55 Herhangi bir üçgenin yüksekliklerinin bir noktada kesiştiğini kanıtlayınız.
Çözüm : Köşeleri A, B, C olan üçgeni alalım. B ve
−−→
−
−
→
−−→
−→
C köşelerinden, CD ⊥ BA ve BE ⊥ AC olacak
−−→ −−→
şekilde, BE ve CD vektörlerini alalım. Bu iki vektörün kesişme noktası K olsun. A ve K noktasından
−→
−−→
geçen AF vektörünün BC vektörüne dik olduğunu
−−→ −−→
gösterirsek kanıt biter. Ya da, KA ⊥ BC olduğunu
göstermek yeterlidir. Gösterimi basitleştirmek için,
−−→
−−→
−−→
KA = ~
x, KB = y
~ ve KC = ~
z
A
D
G
y
B
G
x
E
G
z
K
F
C
diyelim.
−
−→
−→
Verilenlere göre, AB = y
~−~
x ve AC = ~
z−~
x şeklinde yazılabilir. Ayrıca,
−
−
→
AB ⊥ ~
z olduğundan, h~
z, y
~−~
xi = 0 veya hz, yi − h~
z, ~
xi = 0 (∗)
−→
AC ⊥ y
~ olduğundan, h~
y, ~
z−~
xi = 0 veya hy, zi − h~
y, ~
xi = 0 (∗∗)
eşitlikleri vardır. (∗) ve (∗∗) eşitliklerini taraf tarafa çıkarırsak,
h~
y, ~
xi − h~
z, ~
xi = 0 veya h~
y−~
z, ~
xi = 0
−−→
elde edilir. y
~−~
z = BC olduğundan,
D−−→ E
BC, ~
x =0
−−→
−→
−−→
bulunur ki, bu BC ⊥ ~
x olması demektir. Böylece, AF ⊥ BC olduğunu buluruz ki, bu
tüm yüksekliklerin K noktasında kesiştiğini gösterir.
4.51 Alıştırma Herhangi bir üçgenin kenarlarının orta dikmelerinin bir noktada kesiştiğini kanıtlayınız.
142
Analitik Geometri - Mustafa Özdemir
Rn uzayında, verilen herhangi bir ~
x vektörünün, başka bir y
~ vektörü üzerindeki dik
izdüşüm vektörünü de, Öklid iç çarpımı yardımıyla bulabiliriz.
Öklid iç çarpımını kullanarak İzdüşüm Vektörünün bulunması
4.12
Teorem
n
G
x
x, y ∈ R sıfırdan farklı vektörleri veril-
G
x vektörünün, y
~ vektörü üzerindeki dik izdüşüm vektörü
sin. ~
y
θ
G
h~
x, y
~i
xizd
y
~
~
xizd =
h~
y, y
~i
ile bulunur.
Kanıt : ~
e, y
~ doğrultusundaki birim vektör olsun. Buna göre,
xizd
~
y
~
G
=
~
e=
x
k~
yk
k~
xizd k
θ
G
e
G
xizd
G
y
yazılabilir. Bu eşitlikten, ~
xizd =
yandan,
xk cos θ = k~
xk
k~
xizd k = k~
olduğu kullanılırsa,
~
xizd =
bulunur.
h~
x, y
~i
2
k~
yk
k~
xizd k
y
~ elde edilir. Diğer
k~
yk
h~
x, y
~i
h~
x, y
~i
=
k~
xk k~
yk
k~
yk
y
~=
h~
x, y
~i
y
~
h~
y, y
~i
¥
Örnek 4.56 ~
x = (1, 1, 3, 4) vektörünün y
~ = (2, 3, 1, 1) vektörü üzerindeki dik izdüşüm
vektörünü bulunuz.
Çözüm : Formül uygulanarak
12
4
h~
x, y
~i
y
~=
y
~ = (2, 3, 1, 1)
h~
y, y
~i
15
5
elde edilir. Siz, formül uygulamak yerine, kanıtta kullandığımız yöntemle bulmaya çalışınız.
~
xizd =
4.52 Alıştırma ~
x = (0, 1, 1, 0, 1) vektörünün y
~ = (1, 1, 1, 1, 1) vektörü üzerindeki dik
izdüşüm vektörünü bulunuz.
3
Yanıt : ~
xizd = (1, 1, 1, 1, 1) .
5
x = (2, 1, 1) vektörünün y
~ = (1, 1, 3) vektörü üzerindeki dik izdüşüm
4.53 Alıştırma ~
vektörünü bulunuz.
6
(1, 1, 3) .
Yanıt : ~
xizd =
11
143
VEKTÖRLER
Öklid İç Çarpımını Kullanarak R3 Uzayında Düzlemin Denkleminin İfade
Edilmesi
Bu konuyu daha sonra daha detaylı inceleyeG
ceğiz.
Fakat, bir düzlemin denklemini iç
N=( A, B, C )
çarpımı kullanarak nasıl ifade edebileceğimizi
kısaca görelim. Bunun için düzleme dik olan
X
bir vektörü kullanacağız. Düzleme dik olan bir
vektör, düzlem üzerindeki tüm vektörlere dikP(x0,y0,z0)
tir. Buna göre, düzlemin P gibi bir noktasını ve
→
−
düzlemin dik olduğu N gibi bir vektörü biliyorsak düzlem denklemini kolayca bulabiliriz. X (x, y, z) düzlemin değişken noktasını
→
−
−−→
göstermek üzere, P X vektörü daima, N vektörüne diktir. O halde,
→
−−→ −
< P X, N >= 0
→
−
eşitliği sağlanmalıdır. P (x0 , y0 , z0 ) ve N = (A, B, C) olmak üzere,
h(x − x0 , y − y0 , z − z0 ) , (A, B, C)i = 0
eşitliğinden,
A (x − x0 ) + B (y − y0 ) + C (z − z0 ) = 0
elde edilir.
Düzlem denklemi, 6’ncı bölümde detaylı incelenecektir.
Öklid İç Çarpımını Kullanarak Çemberin ve Kürenin İfade Edilmesi
R2 uzayında, yani düzlemde P (x, y) değişken nokta, M (a, b) ve yarıçap r olmak üzere,
çember denklemini, R3 uzayında P (x, y, z) değişken nokta, M (a, b, c) ve yarıçap r
olmak üzere, kürenin denklemini ve Rn uzayında P (x1 , x2 , ..., xn ) değişken nokta,
M (a1 , a2 , ..., an ) ve yarıçap r olmak üzere, hiperkürenin denklemini, iç çarpımı kullanarak,
°−−→°2 D−−→ −−→E
°
°
°M P ° = M P , M P = r2
biçiminde ifade edebiliriz.
r P(x,y)
r
P(x,y,z)
M(a,b,c)
Çember ve küre denklemi 11’inci bölümde detalı incelenecektir.
144
Analitik Geometri - Mustafa Özdemir
Vektörlerin Doğrultu Açıları ve Doğrultman Kosinüsleri
Tanım : Rn uzayında herhangi bir vektörün doğrultusu, koordinat eksenlerinin pozitif
yönde yağtığı açıların kosinüsleri verilerek belirlenebilir. Bir u
~ vektörünün koordinat
eksenleriyle yaptıkları açılara doğrultu açıları, bu açıların kosinüslerine de doğrultman
kosinüsleri denir.
Örneğin, R3 uzayında, u
~ = (u1 , u2 , u3 ) koordinat eksenleriyle pozitif yönde yaptığı
açılar sırasıyla α, β,γ olsun. u
~ vektörünün doğrultman kosinüslerini aşağıdaki gibi belirleyebiliriz. x, y ve z koordinatlarının doğrultu vektörlerini sırasıyla ~
e1 = (1, 0, 0) ,
e3 = (0, 0, 1) ile veririz. Buna göre,
~
e2 = (0, 1, 0) ve ~
u1
uk k~
e1 k cos α ⇒ u1 = k~
uk cos α ⇒ cos α =
<u
~, ~
e1 >= k~
k~
uk
u2
<u
~, ~
e2 >= k~
uk k~
e2 k cos β ⇒ u2 = k~
uk cos β ⇒ cos β =
k~
uk
u3
<u
~, ~
e3 >= k~
uk k~
e2 k cos γ ⇒ u3 = k~
uk cos γ ⇒ cos γ =
k~
uk
elde edilir.
4.13
~ = (u1 , u2 , ..., un ) vektörünün, Rn ’in dik
Teorem Rn uzayında verilen bir u
koordinat sistemindeki koordinat eksenleriyle yaptıkları açılar sırasıyla θ1 , θ2 , ..., θn
olsun. Buna göre,
eşitliği sağlanır.
cos2 θ1 + cos2 θ2 + cos2 θ3 + · · · + cos2 θn = 1
Kanıt : Rn uzayında koordinat eksenlerinin doğrultu vektörleri olarak,
~
e1 = (1, 0, 0, ..., 0) , ~
e2 = (0, 1, 0, ..., 0), ..., ~
en = (0, 0, 0..., 1)
alınabilir. Buna göre,
cos θi =
elde edilir.
ui
h~
u, ~
ei i
=
k~
uk k~
ei k
k~
uk
145
VEKTÖRLER
Buradan,
cos2 θ1 + cos2 θ2 + · · · + cos2 θn
=
u21
2
+
u22
2
+ ··· +
=
k~
uk
k~
uk
2
2
u1 + u2 + · · · + u2n
=
k~
uk
2
k~
uk2
u2n
2
k~
uk
k~
uk2
=1
bulunur.
¥
n
Teorem 4.13. kullanılarak, R boyutta, bir vektörün koordinat eksenleriyle yaptığı n
açıdan, n − 1 tanesi verilirse, n’inci açı hakkında yorum yapılabilir.
Örnek 4.57 R3 uzayında bir u
~ vektörünün x ekseniyle 60◦ , y ekseniyle 150◦ yaptığı
biliniyor. Buna göre, z ekseniyle kaç derecelik açı yapabilir?
Çözüm : cos2 60◦ + cos2 (150◦ ) + cos2 (θ3 ) = 1 olduğunu kullanacağız. Buna göre,
1 3
cos2 (θ3 ) = 1 − − = 0
4 4
olduğundan, cos θ3 = 0 olabilir. Yani, θ3 = 90◦ veya 270◦ olabilir.
~ vektörünün x ekseniyle 60◦ , y ekseniyle 60◦ yaptığı
4.54 Alıştırma R3 uzayında bir u
biliniyor. Buna göre, z ekseniyle kaç derecelik açı yapabilir?
Yanıt : 45◦ veya 135◦ .
Örnek 4.58 R3 uzayında bir doğru z ekseniye 45◦ ’lik, x ekseniyle 60◦ ’lik açı yapmaktadır. Buna göre, bu doğrunun y ekseniyle yaptığı açının tanjantını bulunuz. Bu
doğrunun birim doğrultu vektörü ne olabilir?
Çözüm : cos2 60◦ + cos2 θ2 + cos2 (45◦ ) = 1 eşitliğinden,
1
cos2 θ2 =
4
1
−1
⇒ θ = 120◦ , 240◦ olur.
olur. Buradan, cos θ = ⇒ θ = 60◦ , 300◦ veya cos θ =
2
2
uk = 1 olduğundan,
Doğrunun doğrultu vektörü u
~ = (u1 , u2 , u3 ) olsun. k~
u
1
u
1
1
1
⇒
= ⇒ u1 = ,
cos 60◦ =
k~
uk
k~
uk
2
2
u2
+1
⇒ u2 =
cos θ2 =
k~
uk
2
√
u3
2
⇒ u3 =
cos 45◦ =
k~
uk
2
√
2
1 1
) bulunur.
olacağından, u
~ = ( ,± ,
2 2 2
146
Analitik Geometri - Mustafa Özdemir
Sonuç : Rn uzayında, bir u
~ vektörünün doğrultu kosinüsleri cos θ1 , cos θ2 , ..., cos θn
ise,
u
~ = k~
uk (cos θ1 , cos θ2 , ..., cos θn )
ile belirlidir.
Örnek 4.59 R4 uzayında, u
~ = (1, 4, 2, 3) vektörünün doğrultman kosinüslerini bulunuz.
Çözüm : u
~ vektörünün eksenlerle yaptığı açılar θ1 , θ2 , θ3 ve θ4 olmak üzere,
ui
h~
u, ~
ei i
=
cos θi =
k~
uk k~
ei k
k~
uk
olduğu kullanılırsa,
1
4
2
3
cos θ1 = √ , cos θ2 = √ , cos θ3 = √ , cos θ4 = √
30
30
30
30
bulunur.
Örnek 4.60 cos (θ − α) = cos α cos θ + sin θ sin α olduğunu vektörleri kullanarak
kanıtlayınız.
Çözüm : ~
x ve y
~ birim vektörlerinin x ekseniyle yaptıkları açılar sırasıyla θ ve α olsun. Bu durumda bu
vektörleri ³
´´
³π
− θ = (cos θ, sin θ)
x = cos θ, cos
~
³
³ π2
´´
y
~ = cos α, cos
− α = (cos α, sin α)
2
biçiminde yazabiliriz. Diğer yandan ~
x ve y
~ vektörleri birim ve aralarındaki açı θ − α olduğundan,
cos (θ − α) = hx, yi yazılabilir. Buradan,
θ
O
α
G
y
B
Not : cos (θ + α) = cos α cos θ − sin θ sin α olduğunu da, yandaki şekili kullanarak elde edebiliriz. Burada,
x = (cos θ, sin θ) ve y
~
~ = (cos α, − sin α)
olduğu kullanılır.
A
G
x
θ
G
x
cos (θ − α) = h(cos θ, sin θ) , (cos α, sin α)i
cos (θ − α) = cos α cos θ + sin θ sin α
elde edilir.
O
A
αG
y
B
147
VEKTÖRLER
A
G
x
θ
α
O
B
G
y
Not : sin (θ − α) = sin θ cos α − sin α cos θ olduğunu da,
yandaki şekili kullanarak elde edebiliriz. Burada,
x = (sin θ, cos θ) ve y
~
~ = (cos α, − sin α)
olduğu kullanılır.
A
G
x
θ
O
α
Not : sin (θ + α) = sin θ cos α + sin α cos θ olduğunu da,
yandaki şekili kullanarak elde edebiliriz. Burada,
x = (sin θ, cos θ) ve y
~
~ = (cos α, sin α)
olduğu kullanılır.
G
y
B
Örnek 4.61 Saat 04.10’da, uzunluğu 1 br olan akrep ile uzunluğu 2 br olan yelkovanın uçları arasındaki uzaklık kaç br olur?
b) Saatin merkezi orjin kabul edilirse, 4.10’da akrep (~
u) ve yelkovanı (~
n) vektörel
olarak nasıl ifade edebiliriz. ~
n−u
~ vektörünü bulunuz ve uzunluğunu hesaplayınız.
Çözüm : Saat 04.00’da akrep ile yelkovan arasındaki açı 120◦ ’dir. Buna göre,
10
akrebin ve yelkovanın 10 dakikada kaçar
2 br derece hareket ettiğini bulmalıyız. Yelkovan, 60 dakikada 360◦ hareket ettiğinden,
1 br 10 dakikada 60◦ hareket eder. Akrep ise,
4 4 60 dakikada 30◦ hareket ettiğinden, 10
dakikada 5◦ hareket edecektir. Buna göre,
04.00 04.10 04.10’da akrep ile yelkovan arasındaki açı,
120 + 5 − 60 = 65◦ olur.
Böylece, Kosinüs teoreminden, akrep ve yelkovanın uçları arasındaki uzaklık :
12 x=
√
4 + 1 − 2 · 2 · 1 · cos 65◦
eşitliğinden, x = 1, 8192 olarak bulunur.
b) Şimdi vektörel olarak çözelim. 04.10’da yelkovan ile y ekseni arasındaki açı 60◦
olduğundan, yelkovanı vektörel olarak,
~
n = (2 sin 60◦ , 2 cos 60◦ )
şeklinde, akrep ile x ekseni arasındaki açı ise, 30◦ + 5◦ = 35◦ olduğundan, akrebi de
148
Analitik Geometri - Mustafa Özdemir
u
~ = (1 cos 35◦ , −1 sin 35◦ )
şeklinde ifade edebiliriz. Böylece,
~
n−u
~ = (2 sin 60◦ , 2 cos 60◦ ) − (1 cos 35◦ , −1 sin 35◦ )
= (2 sin 60◦ − cos 35, 2 cos 60◦ + sin 35◦ )
olacaktır. Buradan da,
q
2
2
k~
n−u
~ k = (2 sin 60◦ − cos 35◦ ) + (2 cos 60◦ + sin 35◦ ) = 1, 8192
olduğu bulunabilir.
4.55 Alıştırma Saat 05.10’da uzunluğu k olan akrep ile, uzunluğu m olan yelkovanın
uçları arasındaki uzaklığı vektörel yöntemle hesaplayınız.
Örnek 4.62 Bir ABC üçgeninin [BC] kenarı, |CD| = |BC| olacak biçimde C
noktasının ötesindeki bir D noktasına uzatılıyor. [CA] kenarı ise,
|AE| = 2|CA|
olacak biçimde A noktasının ötesindeki bir E noktasına uzatılıyor. |AD|=|BE| ise,
ABC’nin bir dik üçgen olduğunu kanıtlayınız. (European Girls’ Mathematical Olympiad 2013)
−→
−−→
Çözüm : CA = ~
x ve CB = y
~ diyelim. Bu
−→
−−→
durumda, AE = 2~
x ve DC = y
~ olur.
Buna göre,
−−→
−−→
BE = 3~
x−y
~ ve DA = ~
x+y
~
E
olacaktır. Buradan, |DA|=|BE| eşitliğine
göre,
−−→ −−→
−−→ −−→
< DA, DA > = < BE, BE >
h~
x+y
~, ~
x+y
~ i = h3~
x−y
~ , 3~
x−y
~i
G
2x
A
B
G
y
G
x
C
G
y
olmalıdır. İç çarpımın lineerliğinden,
h~
x, ~
xi − 2 h~
x, y
~ i + h~
y, y
~ i = 9 h~
x, ~
xi + 6 h~
x, y
~ i + h~
y, y
~i
yazılarak düzenlenirse,
h~
x, ~
xi − h~
x, y
~ i = 0 ⇒ h~
x, ~
x−y
~i = 0 ⇒
⇒
−→ −
−→
elde edilir ki, bu ise AC ⊥ AB olduğunu gösterir.
−→ −→ −−→
< CA, CA − CB >= 0
−→ −−
→
< CA, BA >= 0
D
149
VEKTÖRLER
Vektörel Çarpım ve Geometrik Uygulamaları
Skaler çarpımın sonucu bir skaler değerdir. İki vektörün vektörel çarpımı ise bir vek~ = (y1 , y2 , y3 ) gibi iki vektörün vektörel çarpımı;
tördür. Uzayda ~
x = (x1 , x2 , x3 ) ve y
¯
¯
¯ ~i ~j ~
k ¯¯
¯
~
x×y
~ = ¯¯ x1 x2 x3 ¯¯
¯ y1 y2 y3 ¯
~
x×y
~
= (x2 y3 − x3 y2 , −x1 y3 + x3 y1 , x1 y2 − x2 y1 )
şeklinde tanımlanır. Bu tanıma göre, iki vektörün vektörel çarpımının sonucunda yeni
bir vektör elde edilir.
Örnek 4.63 ~
x = (1, 2, 3) ve y
~ = (0, 2, 1) olduğuna göre, ~
x×y
~ vektörünü bulunuz.
⎡
⎤
~i ~j ~
k
Çözüm : ~
x×y
~ = det ⎣ 1 2 3 ⎦ = (−4, −1, 2) olur. Bu vektörün hem ~
x hem de
0 2 1
y
~ vektörüyle iç çarpımının sıfır olduğunu ve dolayısıyla ~
x ve y
~ vektörlerine dik olduğunu
görünüz.
¯
¯
¯ ~i ~j ~
¯
¯
¯ ¯
¯¶
µ¯
k ¯¯
¯
¯ 2 3 ¯
¯ 1 3 ¯ ¯ 2 3 ¯
¯
¯
¯
¯
¯
¯
¯
¯ şeklinde hesapNot : ~
x×y
~ = ¯ 1 2 3 ¯ = ¯
,−¯
,
2 1 ¯
0 1 ¯ ¯ 2 1 ¯
¯ 0 2 1 ¯
lanabilir.
+ ‐
+
4.56 Alıştırma ~
x = (1, 1, 2) ve y
~ = (1, 2, 1) olduğuna göre, ~
x×y
~ vektörünü bulunuz.
Yanıt : (−3, 1, 1) .
x = (−1, 2, 3) ve y
~ = (3, −2, 1) olduğuna göre, ~
x×y
~ vektörünü
4.57 Alıştırma ~
bulunuz.
Yanıt : (8, 10, −4) .
150
Analitik Geometri - Mustafa Özdemir
Vektörel Çarpımın Bazı Özellikleri
~
x×y
~ vektörel çarpımını, determinant yardımıyla tanımlamıştık. Determinantın özelliklerini kullanarak, vektörel çarpımın aşağıdaki özelliklerini kolayca yazabiliriz.
1. ~
x×y
~ = −~
y×~
x (Vektörel çarpımın değişme özelliği yok)
Kanıt : Vektörel çarpımın determinantlı tanımının doğrudan sonucudur. Determinantta
iki satırın yeri değişirse, determinant işaret değiştirir.
2. ~
x×~
x = ~0 (Bir vektörün kendisiyle vektörel çarpımı 0 vektörüdür.)
Kanıt : Herhangi iki satırı aynı olan matrisin determinantının 0 olmasının sonucudur.
3. λ ∈ R için, (λ~
x) × y
~ = λ (~
x×y
~)
4. ~0 × ~
x=~
x ×~
0 = ~0
5. ~
x×y
~ = ~0 ⇔ λ ∈ R için ~
x = λ~
y . (Yani, ~
x k~
y ise vektörel çarpım 0 vektörüdür.)
x×~
z) .
6. ~
x × (~
y+~
z ) = (~
x×y
~ ) + (~
Örnek 4.64 ~
x = (1, −2, 3) ve y
~ = (−2, 4, −6) ise ~
x×y
~ =?
Çözüm : y
~ = −2~
x olduğundan, ~
x k~
y olur ki, ~
x×y
~ = ~0 olur.
4.58 Alıştırma Vektörel çarpımı 0 olan iki vektör yazınız.
k standart vektörleri için, ~i × ~j = ~
k, ~j × ~
k = ~i,
Örnek 4.65 R3 uzayının ~i, ~j, ~
~j × ~i = −~
k olduğunu gösteriniz.
Çözüm : ~i = (1, 0, 0) , ~j = (0, 1, 0) ve ~
k = (0, 0, 1) olduğunu kullanacağız.
¯
¯
¯
¯
¯
¯ ~i ~j ~
¯
¯
¯ ~i ~j
~ ~ ~ ¯
k ¯
¯
¯ i j k ¯
¯
~
¯
¯
¯
~i × ~j = ¯ 1 0 0 ¯ = ~
~
~
~
~
¯
¯ k, j × k = ¯ 0 1 0 ¯ = i, j × i = ¯ 0 1
¯ 0 1 0 ¯
¯ 0 0 1 ¯
¯ 1 0
biçiminde kolayca görülebilir.
i
_ j
+
k
~
k
0
0
¯
¯
¯
¯ = −~
k
¯
¯
Not : Standart birim vektörlerin vektörel çarpımında yandaki
şekil kullanılabilir.
~i × ~j = ~
~j × ~i = −~
k
k
~j × ~
~
~
k=i
k × ~j = −i
~
~i × ~
k × ~i = ~j
k = −~j
Örnek 4.66 Vektörel çarpım işleminin birleşme özelliği var mıdır?
Çözüm : Vektörel çarpım işleminin birleşme özelliğinin olmadığını bir ters örnekle gösterebiliriz. ~
x = (1, 0, 1) , y
~ = (0, 1, 1) ve ~
z = (1, 1, 0) vektörlerini alalım ve (~
x×y
~) × ~
z 6=
~
x × (~
y×~
z ) olduğunu görelim.
151
VEKTÖRLER
¯
¯
¯
~
x×y
~ = ¯¯
¯
olduğundan,
¯
¯
¯
~i ~j ~
k ¯¯
¯
¯
~×z
~ = ¯¯
1 0 1 ¯ = (−1, −1, 1) ve y
¯
0 1 1 ¯
¯
¯
¯
(~
x×y
~) × ~
z = ¯¯
¯
¯
¯
¯
x × (~
~
y×~
z ) = ¯¯
¯
¯
~i ~j ~
k ¯¯
0 1 1 ¯¯ = (−1, 1, −1)
1 1 0 ¯
¯
~i
~j ~
k ¯¯
−1 −1 1 ¯¯ = (−1, 1, 0)
1
1 0 ¯
¯
~i ~j ~
k ¯¯
1 0 1 ¯¯ = (−1, 0, 1)
−1 1 −1 ¯
x×y
~ )×~
z 6= ~
x ×(~
y×~
z ) olduğundan, vektörel çarpımda birleşme özelliği
elde edilir ki, (~
yoktur.
Vektörel Çarpımın En Önemli Geometrik Yorumu
4.14
Teorem Uzayda verilen iki vektörün vektörel çarpımı, çarpılan her iki vektöre de dik olan yeni bir vektör verir.
Kanıt : ~
x×y
~⊥~
x ve ~
x×y
~⊥y
~ olduğunu göstermek için,
h~
x×y
~, ~
xi = h~
x×y
~, y
~i = 0
~ = (y1 , y2 , y3 ) vektörleri için,
olduğunu göstermek yeterlidir. ~
x = (x1 , x2 , x3 ) ve y
~
x×y
~ = (x2 y3 − x3 y2 , −x1 y3 + x3 y1 , x1 y2 − x2 y1 )
olduğundan,
h~
x×y
~, ~
xi = x2 y3 x1 − x3 y2 x1 − x1 y3 x2 + x3 y1 x2 + x1 y2 x3 − x2 y1 x3 = 0
h~
x×y
~, y
~ i = x2 y3 y1 − x3 y2 y1 − x1 y3 y2 + x3 y1 y2 + x1 y2 y3 − x2 y1 y3 = 0
olduğu görülebilir.
G G
x× y
G
y
¥
G
x
Örnek 4.67 R3 uzayında ~
x = (2, 3, 11) ve y
~ = (−2, 7, 5) vektörlerinin her ikisine
de dik olan bir vektör bulunuz.
Çözüm : Bu iki vektörün vektörel çarpımları, her ikisine de dik olan istenen vektörü
verecektir.
¯
¯
¯ ~i ~j ~
k ¯¯
¯
~
x×y
~ = ¯¯ 2 3 11 ¯¯ = −62i − 32j + 20k
¯ −2 7 5 ¯
olduğundan, ~
z = (−62, −32, 20) vektörü, hem ~
x hem de y
~ vektörüne dik bir vektördür.
152
Analitik Geometri - Mustafa Özdemir
Not ! Bir V vektör uzayının tabanındaki tüm vektörler birbirine dik ise, bu tabana V
uzayının ortogonal tabanı denir. Bu vektörlerin herbiri ayrıca birim vektör ise bu tabana
ortonormal taban denir.
Örneğin,
~ 2 = (2, 1, −2) , u
~ 3 = (2, −2, 1)}
{~
u1 = (2, 1, 2) , u
tabanı bir ortogonal taban,
¾
½
1
1
1
~ 2 = (2, 1, −2) , u
~ 3 = (2, −2, 1)
u
~ 1 = (2, 1, 2) , u
3
3
3
tabanı ise bir ortonormal tabandır.
Örnek 4.68 R3 uzayının ~
x = (1, 2, 3) vektörünü içeren bir ortogonal tabanını bulunuz.
Çözüm : Önce, ~
x = (1, 2, 3) vektörüne dik herhangi bir vektör alalım. h~
x, y
~ i = 0 olacak
şekilde, y
~ = (3, −3, 1) vektörü alınabilir. Şimdi, ise, hem ~
x hem de y
~ vektörüne dik bir
vektör bulalım. Bu kez, ~
x×y
~=~
z alınabilir. Buradan,
¯
¯
¯ ~i ~j ~
k ¯¯
¯
z = ¯¯ 1 2 3 ¯¯ = (11, 8, −9)
~
¯ 3 −3 1 ¯
olur. Böylece,
{~
x = (1, 2, 3) , y
~ = (3, 3, −1) , ~
z = (11, 8, −9)}
R3 ün ortogonal bir tabanı olur. Ayrıca, ortonormal tabanını da her vektörü normuna
bölerek elde edebiliriz. Buna göre,
¾
½
1
1
1
√ (1, 2, 3) , √ (3, −3, 1) , √
(11, 8, −9)
14
19
266
ise ortonormal tabandır. Siz de, kendi belirleyeceğiniz bir y
~ vektörüyle başka bir ortogonal
taban bulunuz.
Örnek 4.69 ~
x = (1, 1, 2) olmak üzere, ~
x vektörüne dik ve birbirine dik olan, 2 br
uzunluğunda iki vektör bulunuz.
Çözüm : ~
x⊥y
~ olacak şekilde, y
~ = (1, 1, −1) alınabilir. Hem ~
x hem de y
~ vektörüne
¯
¯
dik vektörü de,
¯ ~i ~j ~
k ¯¯
¯
¯
z = ¯ 1 1 2 ¯¯ = (−3, 0, 3)
~
¯ 1 1 −1 ¯
alınabilir. Fakat, uzunluklarının 2 br olmasını istiyoruz. Buna göre,
→
−
→0
−
2
2
2~
y
2~
z
= √ (1, 1, −1) ve z 0 =
= √ (−1, 0, 1)
y =
k~
yk
k~
z
k
3
2
alınabilir.
153
VEKTÖRLER
x = (1, 2, −2) olmak üzere, R3 uzayının ~
x vektörünü içeren bir ortog4.59 Alıştırma ~
onal tabanını bulunuz.
1
4.60 Alıştırma ~
x = √ (1, 0, 1) olmak üzere, R3 uzayının ~
x vektörünü içeren bir
2
ortonormal tabanını bulunuz.
4.15
Teorem ~x, y~, ~z ∈ R3 vektörleri için (~x × y~) × ~z = h~x, ~zi y~ − h~y, ~zi ~x
eşitliği sağlanır.
Kanıt : ~
x = (x1 , x2 , x3 ), y
~ = (y1 , y2 , y3 ) ve ~
z = (z1 , z2 , z3 ) olsun.
~
x×y
~ = (x2 y3 − x3 y2 , −x1 y3 + x3 y1 , x1 y2 − x2 y1 ) olduğunu biliyoruz.
¯
¯
¯
¯
~i
~j
~
k
¯
¯
¯
(~
x×y
~) × ~
z = ¯ x2 y3 − x3 y2 −x1 y3 + x3 y1 x1 y2 − x2 y1 ¯¯
¯
¯
z1
z2
z3
=
(x2 y1 z2 − x1 y2 z2 − x1 y3 z3 + x3 y1 z3 + x1 y1 z1 − x1 y1 z1 ,
x1 y2 z1 − x2 y1 z1 − x2 y3 z3 + x3 y2 z3 + x2 y2 z2 − x2 y2 z2 ,
x1 y3 z1 − x3 y1 z1 + x2 y3 z2 − x3 y2 z2 + x3 y3 z3 − x3 y3 z3 )
şeklinde yazabiliriz (Burada altı çizili olan terimler ekleyip çıkardığımız terimlerdir.) Buradan,
(y1 (x1 z1 + x2 z2 + x3 z3 ) − x1 (y1 z1 + y2 z2 + y3 z3 ) ,
y2 (x1 z1 + x2 z2 + x3 z3 ) − x2 (y1 z1 + y2 z2 + y3 z3 ) ,
(~
x×y
~) × ~
z =
y3 (x1 z1 + x2 z2 + x3 z3 ) − x3 (y1 z1 + y2 z2 + y3 z3 ))
elde edilir.
x, ~
z i − (x1 , x2 , x3 ) h~
y, ~
zi
= ((y1 , y2 , y3 ) h~
= h~
x, z
~i y
~ − h~
y, ~
zi ~
x
¥
4.61 Alıştırma ~
x = (1, 3, 4) , y
~ = (2, 1, 3) ve ~
z = (1, 1, 1) vektörleri için,
(~
x×y
~) × ~
z = h~
x, ~
z i y − h~
y, ~
zi ~
x
eşitliğinin sağlandığını görünüz.
4.16
Teorem
R3 uzayında h~
x×y
~, ~
z i = det (~
x, y
~, ~
z ) şeklindedir.
Kanıt : ~
x = (x1 , x2 , x3 ), y
~ = (y1 , y2 , y3 ) ve ~
z = (z1 , z2 , z3 ) olsun. Buna göre,
h~
x×y
~, ~
z i = h(x2 y3 − x3 y2 , −x1 y3 + x3 y1 , x1 y2 − x2 y1 ) , (z1 , z2 , z3 )i
= x2 y3 z1 + x3 y1 z2 + x1 y2 z3 − x3 y2 z1 − x1 y3 z2 − x2 y1 z3
¯
¯
¯ x1 x2 x3 ¯
¯
¯
= ¯¯ y1 y2 y3 ¯¯
¯ z1 z2 z3 ¯
eşitliğinden, h~
x×y
~, ~
z i = det (x, y
~, ~
z ) elde edilir.
¥
154
Analitik Geometri - Mustafa Özdemir
4.62 Alıştırma ~
x = (1, 3, 4) , y
~ = (2, 1, 3) ve ~
z = (1, 1, 1) vektörleri için h~
x×y
~, ~
zi =
det (~
x, y
~, ~
z ) eşitliğinin sağlandığını görünüz.
4.17
Teorem
R3 uzayında h~
x×y
~, ~
z i = h~
x, y
~×~
z i eşitliği sağlanır.
Kanıt : Önceki teoremden, h~
x×y
~, ~
z i = det (~
x, y
~, ~
z ) olduğunu görmüştük. Determinant
özelliklerini kullanarak,
h~
x×y
~, ~
z i = det (~
x, y
~, ~
z ) = − det (~
y, ~
x, ~
z)
= det (~
y, ~
z, ~
x)
= h~
y×~
z, ~
xi = h~
x, y
~×~
zi
¥
olduğu görülür.
x×y
~, ~
z i = h~
z×~
x, y
~ i olduğunu kanıtlayınız.
Örnek 4.70 R3 uzayında, h~
Çözüm :
olduğu görülür.
4.18
Teorem
h~
x×y
~, ~
z i = det (~
x, y
~, ~
z ) = − det (~
z, y
~, ~
x)
= det (~
z, ~
x, y
~)
= h~
z×~
x, y
~i
R3 uzayında, h~
x×y
~, ~
z × wi
~
sağlanır. (Lagrange Özdeşliği)
Kanıt : Bir önceki teoremi kullanırsak,
=
¯
¯ h~
z i h~
x, wi
~
¯ x, ~
¯ h~
y, ~
z i h~
y , wi
~
¯
¯
¯ eşitliği
¯
h~
x×y
~, ~
z × wi
~ = h(~
x×y
~) × ~
z , wi
~
yazılabilir. Şimdi de, (~
x×y
~) × ~
z = h~
x, ~
zi y
~ − h~
y, ~
zi ~
x eşitliğini kullanıp, iç çarpımın
lineerliğini kulanırsak,
h~
x×y
~, ~
z × wi
~
= h(~
x×y
~) × ~
z , wi
~ = hh~
x, ~
zi y
~ − h~
y, ~
zi ~
x, wi
~
= h~
x, ~
z i h~
y , wi
~ − h~
y, ~
z i h~
x, wi
~
¯
¯
¯ h~
¯
x
,
z
~
i
h~
x
,
wi
~
¯
= ¯¯
h~
y, ~
z i h~
y , wi
~ ¯
elde edilir.
¥
4.63 Alıştırma R3 uzayında Lagrange özdeşliğini kullanarak k~
x×y
~ k ifadesini iç
çarpıma bağlı olarak bulunuz.
2
155
VEKTÖRLER
Vektörel Çarpımın Normunun Geometrik Anlamı
4.19
Teorem
R3 uzayında verilen ~
x ve y
~ vektörleri arasındaki açı θ olmak üzere,
~
x ve y
~ vektörleriyle oluşturulan paralelkenarın alanı Alan (~
x, y
~ ) ise,
k~
x×y
~ k = k~
xk k~
y k sin θ = Alan (~
x, y
~)
eşitliği sağlanır.
2
Kanıt : k~
x×y
~ k =h~
x×y
~, ~
x×y
~ i şeklinde yazıp, Lagrange özdeşliği kullanılırsa,
¯
¯
¯
h~
x, ~
xi h~
x, y
~ i ¯¯
2
2
k~
x×y
~ k = ¯¯
= h~
x, ~
xi h~
y, y
~ i − h~
x, y
~i
h~
y, ~
xi h~
y, y
~i ¯
2
2
2
2
2
2
= k~
xk k~
y k − k~
xk k~
y k cos θ
¢
2
2¡
2
y k 1 − cos θ
= k~
xk k~
elde edilir.
G
y
y k sin2 θ
= k~
xk k~
Diğer yandan, ~
x ve y
~ vektörleriyle oluşturulan paralelkenarın alanı :
Alan (~
x, y
~ ) = k~
xk k~
y k sin θ olduğundan,
k~
x×y
~ k = k~
xk k~
y k sin θ = Alan (~
x, y
~)
G
3
bulunur. Sonuç olarak, R uzayında verilen iki vektörün
x
vektörel çarpımının normu, bu iki vektörler oluşturulan paralelkenarın alanını verir.
¥
(Bunun sadece R3 de geçerli olduğunu unutmayınız!)
θ
x = (1, 2, 3) ve y
~ = (3, 2, 1) vektörleriyle oluşturulan
Örnek 4.71 R3 de verilen ~
paralelkenarın alanını bulunuz.
Çözüm : Yukarıdaki özellik kullanılarak,
°
°
° ~i ~j ~
k °
√
°
°
°
Alan (~
x, y
~ ) = k~
x×y
~k = °
° 1 2 3 ° = k(−4, 8, −4)k = 4 6
° 3 2 1 °
bulunur.
x = (0, 1, 2, 3) ve y
~ = (3, 2, 1, 0) vektörleriyle oluşturuÖrnek 4.72 R4 de verilen ~
lan paralelkenarın alanını bulunuz.
Çözüm : Uzayımız R4 olduğu için, vektörel çarpımlı alan formülü kullanılamaz. Bu kez,
q
Alan (~
x, y
~ ) = h~
x, ~
xi h~
y, y
~ i − h~
x, y
~ i2
olduğunu kullanacağız. Buna göre,
√
√
Alan (~
x, y
~ ) = 14 · 14 − 16 = 6 5
bulunur.
156
Analitik Geometri - Mustafa Özdemir
Örnek 4.73 Verilen iki ~
x ve y
~ vektörü için, u
~ ×~
x=y
~ ve h~
u, ~
xi = k~
xk eşitlikleri
sağlandığına göre, k~
uk değerini, k~
xk ve k~
y k cinsinden belirleyiniz.
Çözüm : u
~ ×~
x=y
~ eşitliği, y
~ vektörünün ~
x vektörüne dik olduğunu gösterir. ~
x ve y
~
birbirine dik değilse, u
~ vektörü için bir çözüm yoktur. O halde, ~
x ⊥ y
~ için denklemin
çözümünü yapalım. ~
x ile u
~ arasındaki açı θ olsun. Buna göre,
k~
u×~
xk = k~
uk k~
xk sin θ ⇒ k~
y k = k~
uk k~
xk sin θ
h~
u, ~
xi = k~
uk k~
xk cos θ ⇒ k~
xk = k~
uk k~
xk cos θ
eşitliklerinin kareleri toplamından,
¡
¢
y k2 = k~
uk2 k~
xk2 sin2 θ + cos2 θ
k~
xk2 + k~
s
k~
y k2
olur. Buradan, k~
uk = 1 +
2 elde edilir.
k~
xk
Karma Çarpım ve Geometrik Uygulamaları
Tanım : R3 uzayında, ~
x×y
~ vektörel çarpımıyla, ~
z vektörünün iç çarpımına, ~
x, y
~, ~
z
vektörlerinin karma çarpımı denir. Yani, h~
x×y
~, ~
z i değerine ~
x, y
~, ~
z vektörlerinin
karma çarpımı denir ve [~
x, y
~, ~
z ] ile gösterilir. Yukarıda,
h~
x×y
~, ~
z i = det (~
x, y
~, ~
z)
olduğu göstermiştik. O halde, ~
x, y
~, ~
z vektörlerinin karma çarpımı,
x, y
~, ~
z)
[~
x, y
~, ~
z ] = det (~
şeklinde tanımlanır. Ayrıca, h~
x×y
~, ~
z i = h~
x, y
~×~
z i eşitliğine göre, bir karma
çarpımda önemli olan vektörlerin sırasıdır. Vektörel çarpım işlemi, ilk iki veya son iki
vektör arasında olabilir ve her iki değer de bu üç vektörün karma çarpımını verir.
Örnek 4.74 ~
x = (1, 2, 3) , y
~ = (3, 2, 4) ve ~
z = (1, 1, 0) olduğuna göre [~
x, y
~, ~
z ] =?
Çözüm : [~
x, y
~, ~
z ] = det (~
x, y
~, ~
z ) tanımı kullanılarak
¯
¯
¯ 1 2 3 ¯
¯
¯
[~
x, y
~, ~
z ] = ¯¯ 3 2 4 ¯¯ = 7
¯ 1 1 0 ¯
elde edilir.
x = (1, 0, 3) , y
~ = (0, 2, 1) ve ~
z = (1, 2, 0) olduğuna göre [~
x, y
~, ~
z ] =?
4.64 Alıştırma ~
Yanıt : −8.
x = (1, k, 3) , y
~ = (3, 2, 1) ve ~
z = (1, 2, 0) vektörlerinin karma
4.65 Alıştırma ~
çarpımı 0 ise k =?
Yanıt : k = −10.
157
VEKTÖRLER
Karma Çarpımın Özellikleri
Aşağıdaki özellikler determinantın özelliklerinden kolayca görülebilir.
1. Vektörlerden ikisi eşit olan üç vektörün karma çarpımı 0’dır.
[~
x, y
~, ~
x] = 0, [~
x, ~
x, y
~ ] = 0, [~
x, y
~, y
~] = 0
2. λ, k, m ∈ R için, [λ~
x, k~
y , m~
z ] = λkm [~
x, y
~, ~
z]
3. λ ∈ R için, [~
x, y
~, ~
z + λw]
~ = [~
x, y
~, ~
z ] + λ [~
x, y
~ , w]
~
Örnek 4.75 [~
x, y
~, ~
z ] = 3 olduğuna göre, [~
x + 2~
y, ~
z+y
~ , 3~
x + 4~
z ] karma çarpımını
hesaplayınız.
Çözüm : Karma çarpımın özellikleri kullanılarak,
[~
x + 2~
y, ~
z+y
~ , 3~
x + 4~
z ] = 3 [~
x + 2~
y, ~
z+y
~, ~
x] + 4 [~
x + 2~
y, ~
z+y
~, ~
z]
= 3 ([~
x + 2~
y, ~
z, ~
x] + [~
x + 2~
y, y
~, ~
x])
x + 2~
y, ~
z, ~
z ] + [~
x + 2~
y, y
~, ~
z] )
+4( [~
{z
}
|
=0
= 3([~
x, ~
z, ~
x] + 2 [~
y, ~
z, ~
x] + [~
x, y
~, ~
x] + 2[~
y, y
~, ~
x] )
| {z }
| {z }
| {z }
=0
=0
=0
+4( [~
x, y
~, ~
z ] + 2[~
y, y
~, ~
z] )
| {z }
=0
= 6 [~
y, ~
z, ~
x] + 4 [~
x, y
~, ~
z]
= 6 [~
x, y
~, ~
z ] + 4 [~
x, y
~, ~
z]
= 10 [~
x, y
~, ~
z]
eşitliğinden, [~
x + 2~
y, ~
z+y
~ , 3~
x + 4~
z ] = 10 · 3 = 30 bulunur.
4.66 Alıştırma [~
x, y
~, ~
z ] = 3 olduğuna göre, [3~
x+~
z, ~
z−y
~, ~
x + 3~
z ] =?
Yanıt : −24.
Karma Çarpımın Geometrik Anlamı
4.20
Teorem R3 uzayında, ~x, y~, ~z vektörlerinin karma çarpımı, ~x, y~ ve ~z vektörleriyle oluşturulan paralelyüzlünün hacmini verir.
Kanıt : ~
x, y
~ ve ~
z vektörleriyle oluşturulan paralelyüzlüyü şekildeki gibi çizelim. Kanıtımızda vektörlerdeki üç önemli özelliğini kullanacağız.
i) ~
x×y
~ , hem ~
x hem y
~ ’ye diktir. O halde, ~
x×y
~ paralelyüzlünün yüksekliği doğrultusundadır.
ii) ~
x ve y
~ ile oluşturulan taban alanı k~
x×y
~ k’dir.
iii) ~
x×y
~ ile ~
z arasındaki açı θ ise, h~
x×y
~ , zi = k~
x×y
~ k k~
z k cos θ ’dır.
158
Analitik Geometri - Mustafa Özdemir
Buna göre, V hacimi göstermek üzere,
kanıtımızı
V
= T aban Alanı · Y ükseklik
= k~
x×y
~ k · h = k~
x×y
~ k k~
z k cos θ
= |h~
x×y
~, ~
z i| = |[~
x, y
~, ~
z ]|
biçiminde yapabiliriz.
¥
G G
x× y
θ
θ
G h
y
G
x
G G
x× y
Örnek 4.76 ~
x = (1, 2, 1) , y
~ = (1, 3, 4) ve ~
z = (2, 3, 1) vektörleriyle oluşturulan
paralelyüzlünün hacmini bulunuz.
Çözüm : Karma çarpımın geometrik yorumu kullanılırsa,
¯
¯
¯ 1 2 1 ¯
¯
¯
Hacim(~
x, y
~, ~
z ) = |[~
x, y
~, ~
z ]| = ¯¯ 1 3 4 ¯¯ = 2
¯ 2 3 1 ¯
olur.
x = (0, 2, 1) , y
~ = (5, 3, 4) ve ~
z = (1, 3, 1) vektörleriyle oluşturulan
4.67 Alıştırma ~
paralelyüzlünün hacmini bulunuz.
Yanıt : 10.
Karma Çarpımın Geometrik Yorumunun Bazı Sonuçları
1. Üç vektörün karma çarpımının sıfır olması demek, hacim oluşmaması demektir. Yani,
üç vektörün aynı düzlemde olması demektir.
2. Üç vektörün karma çarpımının sıfır olması demek, bu üç vektörün lineer bağımlı
olması demektir.
3. Üç vektörün karma çarpımı sıfır ise, bu üç vektörün gerdiği uzayın boyutu 3’den
kesinlikle küçüktür.
4. Üç vektörün karma çarpımı sıfır ise, bu üç vektörün oluşturduğu matrisin rankı 3’den
kesinlikle küçüktür.
5. Üç vektörün karma çarpımı sıfırdan farklı ise, bu vektörler lineer bağımsızdır.
6. Karma çarpımı sıfırdan farklı olan üç vektör, R3 uzayını gererler.
7. Karma çarpımı sıfırdan farklı olan üç vektör, R3 uzayı için bir tabandır.
Örnek 4.77 ~
x = (1, 1, 2) , y
~ = (1, 2, 3) ve ~
z = (2, 3, k) vektörleri lineer bağımlı
ise k =?
Çözüm : ~
x, y
~, ~
z vektörleri lineer bağımlı ise, [~
x, y
~, ~
z ] = 0 olmalıdır.
¯
¯
¯ 1 1 2 ¯
¯
¯
¯ 1 2 3 ¯=k−5=0
¯
¯
¯ 2 3 k ¯
eşitliğinden, k = 5 bulunur.
VEKTÖRLER
159
Örnek 4.78 ~
x = (1, 1, 2) , y
~ = (0, 1, 3) ve ~
z = (2, 1, 3) vektörlerinin lineer bağımsız olduğunu gösteriniz.
Çözüm : [~
x, y
~, ~
z ] 6= 0 ise ~
x, y
~, ~
z lineer bağımsız olur.
¯
¯
¯ 1 1 2 ¯
¯
¯
¯ 0 1 3 ¯ = 2 6= 0
¯
¯
¯ 2 1 3 ¯
olduğundan, ~
x, y
~, ~
z vektörleri lineer bağımsızdırlar.
x = (k, 1, 2) , y
~ = (1, 0, 3) ve z
~ = (2, 1, k) vektörleri lineer bağımlı
4.68 Alıştırma ~
ise k =?
Yanıt : k = 2.
Örnek 4.79 ~
x = (1, 2, k) , y
~ = (2, 3, 1) ve ~
z = (2, 1, 3) vektörleri aynı düzlemde
ise k =?
Çözüm : ~
x, y
~, ~
z aynı düzlemde ise, [~
x, y
~, ~
z ] = 0 olmalıdır.
¯
¯
¯ 1 2 k ¯
¯
¯
¯ 2 3 1 ¯ = −4k = 0
¯
¯
¯ 2 1 3 ¯
eşitliğinden, k = 0 olur.
Örnek 4.80 A (1, 1, 1) , B (1, 2, 3) , C (2, 3, 4) , D (1, 4, k) noktaları aynı düzlemde
ise k =?
−
−→
−→
−−→
x = AB, y
~ = AC, ~
z = AD denilirse, ~
x=
Çözüm : Önce noktadan vektöre geçelim. ~
(0, 1, 2) , y
~ = (1, 2, 3) ve ~
z = (0, 3, k − 1) olur. ~
x, y
~, ~
z aynı düzlemde ise, [~
x, y
~, ~
z] = 0
olmalıdır.
¯
¯
¯ 0 1
2 ¯¯
¯
¯ 1 2
3 ¯¯ = 7 − k = 0
¯
¯ 0 3 k−1 ¯
eşitliğinden, k = 7 bulunur.
x = (1, 1, k) , y
~ = (1, 3, 1) ve ~
z = (k, 1, 3) vektörleri aynı düzlemde
4.69 Alıştırma ~
ise k =?
Yanıt : k ∈ {−1, 3/5} .
4.70 Alıştırma A (k, 1, 2) , B (1, 0, 3), C (2, 1, k) ve D (1, 1, 1) noktaları aynı düzlemde ise k =?
Yanıt : k ∈ {0, 2} .
160
Analitik Geometri - Mustafa Özdemir
Örnek 4.81 ~
x = (1, 1, 2) , y
~ = (0, k, 3) ve ~
z = (2, 1, 3) vektörleri R3 uzayının bir
tabanı ise k =?
Çözüm : [~
x, y
~, ~
z ] = 0 ise, ~
x, y
~, ~
z lineer bağımlı olur.
¯
¯
¯ 1 1 2 ¯
¯
¯
¯ 0 k 3 ¯=3−k =0
¯
¯
¯ 2 1 3 ¯
olursa, ~
x, y
~, ~
z lineer bağımlı olur ve R3 için taban olamazlar. Yani, k 6= 3 için taban
olurlar.
Karma Çarpımla Üçgensel Piramidin Hacminin Bulunması
−−
→ −→
−−→
Bir ABCD piramidinin hacmi, AB, AC ve AD vektörleriyle oluşturulan paralelyüzlünün hacminin 1/6’sıdır. Bunu şekilden de görebilirsiniz.
ABCD’nin hacmi V ise, ADC ∼
= F CB olduğundan, ECDB’nin ve
= ECD ve ABC ∼
F CBE’nin hacmi de V ’dir. Böylece, ABF CDE’nin hacmi 3V olur. ABF CDE’nin
hacmi ise, tüm paralelyüzlünün hacminin yarısı olduğundan, tüm paralelyüzlünün hacmi
6V olur. Buna göre,
−→ −→ −−→i
1 h−
V = Hacim (ABCD) =
AB, AC, AD
6
karma çarpımıyla hesaplanabilir.
E
D
F D
C
A G C
B A
F B Örnek 4.82 Köşelerinin koordinatları A (1, 1, 1),B (1, 2, 3),C (2, 3, 4),D (1, 4, 2)
olan üçgensel piramidin hacmini bulunuz.
−−
→
−→
−−→
Çözüm : AB = (0, 1, 2) , AC = (1, 2, 3) , AD = (0, 3, 1) olduğundan,
¯
¯
¯ 0 1 2 ¯
¯
¯ 5
1
V = Hacim (ABCD) = ¯¯ 1 2 3 ¯¯ =
6¯
6
0 3 1 ¯
elde edilir.
4.71 Alıştırma Köşelerinin koordinatları A (0, 0, 0) , B (1, 2, 3) , C (3, 0, 0) , D (0, 0, 5)
olan üçgensel piramidin hacmini bulunuz.
Yanıt : 5.
161
VEKTÖRLER
Karma Çarpımla Dörtgensel Piramidin Hacminin Bulunması
Tabanının koordinatları A, B, C, D konveks dörtgeni ve tepe noktası E olan ABCDE
piramidinin hacmini bulalım. Bunun için, dörtgensel piramitin hacmini, iki üçgensel
piramidin hacminin toplamı olarak yazıp sonuca ulaşacağız. Buna göre,
V (ABCDE) = V (ABDE) + V (BCDE)
−
→ −−→ −→i 1 h−−→ −−→ −−→i
1 h−
AB, AD, AE +
BC, BD, BE
=
6
6
³
−
−
→ −−→ −→
−−→ −−→ −−→ ´
1
=
det(AB, AD, AE) + det(BC, BD, BE)
6
değeri bize istenen hacmi vecektir.
E
D
C
B
A
Eğer özel olarak, piramidimiz düzgün piramit ise, iki üçgensel piramidin hacimleri aynı
olacağından,
−
−
→ −−→ −→ ´
1³
det(AB, AD, AE)
V (ABCDE) =
3
olur.
Örnek 4.83 Tepe noktası E (3, 4, 5) olan ve tabanının koordinatları A (1, 1, 1) ,
B (1, 2, 3) , C (2, 4, 1) , D (3, 2, k) olan dörtgensel piramidin hacmini bulunuz.
Çözüm : Öncelikle, A, B, C ve D noktalarının aynı düzlemde olması için k’nın değerini
bulalım. Bunun için,
−
−→ −→ −−→
det(AB, AC, AD) = 0
olması gerektiğini kullanabiliriz.
¯
¯ 0
¯
¯ 1
¯
¯ 2
Buradan,
1
2
3
0
1 k−1
¯
¯
¯
¯ = −k − 9 = 0
¯
¯
eşitliğinden, k = −9 olur. Buna göre, dörtgensel piramidin hacmi:
−−
→ −−→ −→
−−→ −−→ −−→ ´
1³
V =
det(AB, AD, AE) + det(BC, BD, BE)
6 ⎛¯
¯ ¯
¯⎞
¯ 0 1 2 ¯ ¯ 1 2 −2 ¯
¯ ¯
¯
1 ⎝¯¯
0 2 14 ¯¯ + ¯¯ 2 0 −12 ¯¯⎠
=
¯
6 ¯
2 3 4 ¯ ¯ 2 2
2 ¯
1
eşitliğinden, V = (20 + 40) = 10 elde edilir.
6
162
Analitik Geometri - Mustafa Özdemir
Rn Uzayında Vektörel Çarpım
Rn uzayında, vektörel çarpımı n × n türünden bir determinant yardımıyla, R3 de
k yazıldığı gibi, Rn
olduğu gibi tanımlayabiliriz. R3 de determinantın ilk satırına ~i, ~j, ~
uzayında da determinantın ilk satırına Rn ’in standart birim vektörleri yazılır. Geriye n − 1
satır kalır. O halde, Rn uzayında sadece n−1 tane vektörün vektörel çarpımını tanımlamak
mümkündür. Ayrıca, bu n−1 vektörün vektörel çarpım işlemini ifade ederken herhangi bir
parantez kullanmayacağız. Örneğin, R4 uzayında 3 vektörün, R5 uzayında ise 4 vektörün
vektörel çarpımı tanımlıdır. Bunları da, sırasıyla ~
x×y
~×~
z ve ~
x×y
~×~
z×w
~ gibi hiçbir
parantez kullanmadan ifade edeceğiz.
Tanım : Rn uzayında verilen n − 1 tane
~
x1 = (x11 , x12 , ...,
x2 = (x21 , x22 , ..., x¢2n ) , ...,
¡ x1n ) , ~
~
xn−1 = x(n−1)1 , x(n−1)2 , ..., x(n−1)n
vektörü için,
~
e1 = (1, 0, 0, ..., 0) , ~
e2 = (0, 1, 0, ..., 0) ve ~
en = (0, 0, 0, ..., 1)
n boyutlu standart birim vektörler ve
Vn : Rn × Rn × Rn × · · · × Rn → Rn
olmak üzere,
¯
¯
¯
¯
~
e2
···
~
en
~
e1
¯
¯
¯
¯ x11
x
·
·
·
x
12
1n
¯
¯
x1 , ~
x2 , ..., ~
xn−1 ) = ¯
Vn (~
¯
..
..
..
¯
¯
.
.
.
¯
¯
¯ x(n−1)1 x(n−1)2 · · · x(n−1)n ¯
n×n
şeklinde tanımlanan determinant, bize n boyutlu yeni bir vektör verir. Bu vekx2 , ..., ~
xn−1 vektörlerinin vektörel çarpımı denir. Vn (~
x1 , ~
x2 , ..., ~
xn−1 ) ,
töre, ~
x1 , ~
x1 × ~
x2 × · · · × ~
xn−1 ) veya kısaca ~
x1 × ~
x2 × · · · × ~
xn−1 ile gösterilir.
Vn (~
Not ! Rn Uzayında Vektörel Çarpımın Geometrik Yorumu
R3 uzayında olduğu gibi, vektörel çarpım sonucunda elde edilen yeni vektör, çarpılan
tüm vektörlere dik bir vektördür. Bu özelliği kullanarak, R4 uzayında verilen herhangi
3 vektöre dik bir vektörü, R4 uzayındaki vektörel çarpımı kullanarak kolayca bulabiliriz.
Bu kullanışlı özelliği daha büyük boyutlarda da kullanabiliriz.
4.21
Teorem
Rn uzayındaki, ~
x1 , ~
x2 , ..., ~
xn−1 vektörlerinin vektörel çarpımıyla
x1 , ~
x2 , ..., ~
xn ) vektörü, ~
x1 , ~
x2 , ..., ~
xn−1 vektörlerinin herbirine dik olan
elde edilen Vn (~
bir vektördür.
163
VEKTÖRLER
x = (1, 0, 1, 1), y
~ = (2, 3, 0, 0) ve ~
z =(0, 1, 1, 2) vektörÖrnek 4.84 R4 uzayında, ~
lerine dik bir vektör bulunuz.
x×y
~×~
z vektörel çarpımı bize istenen dik vektörü
Çözüm : R4 uzayında tanımlanan ~
verir. Buna göre,
¯
¯
¯
¯
~
x×y
~×~
z = ¯¯
¯
¯
~
e1
1
2
0
~
e2
0
3
1
~
e3
1
0
1
~
e4
1
0
2
¯
¯
¯
¯
¯
¯
¯
¯
determinantını bulmalıyız. Üçüncü satıra göre açalım.
¯
¯
¯
¯ ~
¯ ~
e3 ~
e4 ¯¯
e2 ~
¯
¯ e1
1+3 ¯
¯ + 3 · (−1)3+2 ¯ 1
0
1
1
x×y
~
~×~
z = 2 · (−1)
¯
¯
¯
¯ 1 1 2 ¯
¯ 0
~
e3
1
1
~
e4
1
2
e3 − ~
e4 ) − 3 (~
e1 − 2~
e3 + ~
e4 )
= 2 (~
e2 + ~
= −3~
e1 + 2~
e2 + 8~
e3 − 5~
e4
= (−3, 2, 8, −5)
¯
¯
¯
¯
¯
¯
elde edilir. Bu vektörün ~
x, y
~ ve ~
z vektörlerine dik olduğunu görünüz.
x= (0, 1, 2, 1, 1), y
~ = (2, 3, 0, 0, 0), ~
z = (0, 1, 0, 1, 2) ve
Örnek 4.85 R5 uzayında, ~
w=
~ (1, 1, 0, 1, 1) vektörlerine dik bir vektör bulunuz.
Çözüm : ~
x×y
~×~
z×w
~ vektörü istenen vektördür.
¯
¯
¯
¯
¯
~
x×y
~×~
z×w
~ = ¯¯
¯
¯
¯
determinantını üçüncü satıra göre açarsak,
¯
¯ ~
e3
¯ e2 ~
¯ 1 2
x×y
~
~×~
z×w
~ = 2 ¯¯
¯ 1 0
¯ 1 0
~
e1
0
2
0
1
~
e2
1
3
1
1
~
e4
1
1
1
~
e5
1
2
1
~
e3
2
0
0
0
~
e4
1
0
1
1
¯
¯
¯
¯
¯
¯
¯
¯
¯ − 3¯
¯
¯
¯
¯
¯
¯
~
e1
0
0
1
~
e5
1
0
2
1
¯
¯
¯
¯
¯
¯
¯
¯
¯
¯
~
e3
2
0
0
~
e4
1
1
1
~
e5
1
2
1
¯
¯
¯
¯
¯
¯
¯
¯
olur. Burada, İlk determinantta, son satırı 2. ve 3. satırlardan çıkarırsak determinant
değişmez.
164
Analitik Geometri - Mustafa Özdemir
İkinci determinantı ise 3. satıra göre açalım.
¯
¯
¯
¯ ~
¯
⎛¯
e3 ~
e4 ~
e5 ¯¯
¯ e2 ~
¯ ~
¯ ~
e3 ~
e5 ¯¯
e3 ~
e4
¯ 0 2 0 0 ¯
¯ e1 ~
¯ e1 ~
¯
¯
¯ 0 2 1
¯
¯
⎝
0
2
1
~
x×~
y ×~
z ×w
=
~
2¯
−2
−3
¯
¯
¯
¯
¯ 0 0 0 1 ¯
¯ 1 0 1
¯ 1 0 1 ¯
¯ 1 0 1 1 ¯
¯
¯
¯ ~
e3 ~
e4 ¯¯
¯ e2 ~
e3 − 2~
e5 ) −2 (2~
e1 +~
e3 − 2~
e4 ))
= −2 ¯¯ 0 2 0 ¯¯ −3 ((2~
e1 +~
¯ 1 0 1 ¯
bulunur.
¯⎞
¯
¯
¯⎠
¯
¯
e2 + 6~
e1 + 3~
e3 − 12~
e4 + 6~
e5
= 4~
e4 − 4~
= 6~
e1 − 4~
e2 + 3~
e3 − 8~
e4 + 6~
e5
= (6, −4, 3, −8, 6)
x = (1, 2, 1, 1), y
~ = (2, 1, 0, 0) ve ~
z = (0, 2, 1, 0)
4.72 Alıştırma R4 uzayında, ~
vektörlerine dik bir vektör bulunuz.
Yanıt : w
~ =~
x×y
~×~
z = (1, −2, 4, −1) .
x = (1, 1, 1, 1), y
~ = (−1, −1, 1, 1) ve
4.73 Alıştırma R4 uzayında, ~
~
z = (1, −1, −1, 1) vektörleri birbirine dik bir vektördür. Bu vektörlere, dik olan dördüncü
bir vektörü bularak, R4 uzayının bir ortogonal tabanını bulunuz.
Yanıt : w
~ =~
x×y
~×~
z = (1, −1, 1, −1) alınırsa, {~
x, y
~, ~
z , w}
~ bir ortogonal taban olur..
x = (1, 0, 2, 1, 0), y
~ = (2, 1, 0, 0, 0),
4.74 Alıştırma R5 uzayında, ~
~
z = (0, 1, 0, 1, 2) ve w
~ = (1, 1, 0, 1, 1) vektörlerine dik bir vektör bulunuz.
Yanıt : ~
s=~
x×y
~×~
z×w
~ = (2, −4, −1, 0, 2) .
4.22
Teorem Rn deki vektörel çarpımda herhangi iki vektörün yeri değişirse,
sonuç işaret değiştirir.
x1 ×x2 ×· · ·×~
xr ×· · ·×~
xk ×· · ·×xn−1 = −x1 ×x2 ×· · ·×~
xk ×· · ·×~
xr ×· · ·×xn−1
Örnek 4.86 R4 uzayında ~
x×y
~×~
z=y
~×~
z×~
x olduğunu gösteriniz.
Çözüm : Yukarıdaki özellik kullanılırsa,
olduğu görülür
x×y
~
~×~
z = −~
z×y
~×~
x=y
~×~
z×~
x
168
Analitik Geometri - Mustafa Özdemir
7.
Köşelerinin koordinatları A (1, 1, 3, 4) , B (2, 4, 1, 2) ve C (1, 1, 2, 3) olan üçgenin
ağırlık merkezinin koordinatları nedir?
¶
µ
¶
µ
3
9
3
1
, 2, 2,
D)
, 3, 3,
E) (0, 2, 0, 3)
A) (1, 2, 1, 1) B) (1, 2, 2, 3) C)
2
2
2
2
8.
Köşelerinin koordinatları A (3, 4, 5, 6) , B (3, 4, 1, 2) ve C (0, 1, 2, 3) olan üçgenin,
[AB] kenarı üzerinde, |AD| = 3 |DC| olacak şekilde, bir D noktası alınıyor. [CD]
noktasının orta noktasının koordinatları aşağıdakilerden hangisidir?
A) (2, 3, 3, 3) B) (1, 2, 1, 1) C) (1, 2, 2, 1) D) (1, 3, 3, 1) E) (1, 2, 0, 3)
9.
Aşağıdakilerden hangisi birim
µ vektördür?
¶
µ
¶
1
1
1
1
A) (1, 1) B) (1, 0, 1) C) 0, , 0, 0
D) (1, 0, 2, 2) E)
, 0,
2
3
2
2
1
1
~ = (1, k, 0, 1, 0) olmak üzere, ~
x−y
~ vektörü birim vektör
10. ~
x = (1, 3, 0, 2, 2) ve y
3
3
ise, k’nın olabileceği değerlerin toplamı kaçtır?
A) 4
B) −2
C) 6
D) 5
E) 1
11. R3 ’de A (1, 1, 1) ve B (4, 3, 2) noktalarından geçen doğrunun denklemini bulunuz.
y−1
x
y
x−1
y−1
z−1
x−1
=
=z−1
B) = = z
C)
=
=
A)
3
2
3
2
4
3
2
y−3
x−4
=
=z−1
E) x − 4 = y − 3 = z − 2
D)
3
2
12. u
~ = (3, 2, 5) vektörünüm ~
a = (1, 1, 3) , ~b = (1, 2, 4) , ~
c = (0, 1, k) vektörlerinin
lineer bileşimi olarak yazılabilmesi için k ile ilgili aşağıdaki ifadelerden hangisi
doğrudur?
A) k = 1 olursa, u
~ vektörü, ~
a, ~b, ~
c vektörleri cinsinden yazılamaz.
B) k = 0 olursa, u
~ vektörü, ~
a, ~b, ~
c vektörleri cinsinden yazılamaz.
a, ~b, ~
c vektörleri cinsinden yazılabilir.
C) u vektörü, k ne olursa olsun, ~
D) k 6= 1 durumunda, ~
a, ~b, ~
c vektörleri lineer bağımlıdır.
E) k = 1 olursa, ~
a, ~b, ~
c vektörleri R3 ün tabanı olurlar.
13. u
~ = (1, 0, 3) vektörü ~
a = (1, 1, 3) ve ~b = (1, 2, k) vektörlerinin lineer bileşimi
olarak yazılabilmesi için k kaç olmalıdır?
A) 4
B) −2
C) 3
D) 5
E) 1
VEKTÖRLER
169
14. Aşağıdaki vektörlerden hangisi, ~
a = (1, 1, 3) ve ~b = (1, 2, 1) vektörlerinin lineer
bileşimi olarak yazılamaz?
A) (2, 3, 4) B) (0, 2, −2) C) (1, 0, 5) D) (1, 0, 2) E) (1, 3, −1)
15. ~
x = (1, 1, 3) , y
~ = (2, 1, k) ve ~
z = (1, −2, 3) vektörleri lineer bağımlı ise k nedir?
A) 4
B) 6
C) −2
D) 5
E) 1
z = (k, 2, 1, 1), w
~ = (0, 1, 2, 1) vektörlerinin
~ = (2, 1, k, 1), ~
16. ~
x = (1, 1, 3, 1) , y
lineer bağımlı olması için k =?
A) 4
B) 6
C) −2
D) 5
E) 1
~ = (1, 1, 1) , ~
x = (1, 1, 2) , y
~ = (2, 2, 3) ve ~
z = (1, 2, 1)
17. R3 uzayında verilen u
vektörleri için aşağıdakilerden hangisi yanlıştır?
A) u
~, ~
x ve y
~ vektörleri lineer bağımlıdırlar.
B) u
~, ~
x ve ~
z vektörleri R3 ün bir tabanıdır.
C) u
~ ve ~
x vektörleri lineer bağımsızdırlar.
D) u
~, ~
x, y
~ ve z vektörleri R3 ü germezler.
E) u
~, ~
x, y
~ ve z vektörleri R3 ün tabanı değildirler.
18. Aşağıdakilerden hangisi lineer bağımsızlığın taban olma koşulu için tek başına
yeterli olmadığına bir örnektir?
A) R2 , {(1, 2) ; (2, 1)} B) R3 , {(1, 2, 1) ; (2, 1, 1)} C) R2 , {(1, 2) ; (0, 0)}
E) R3 , {(1, 0, 0) , (2, 0, 0)}
D) R2 ,{(1, 2) ; (2, 1) ; (1, 1)}
19. Aşağıdakilerden hangisi germe aksiyomunun taban olma koşulu için tek başına
yeterli olmadığına bir örnektir?
A) R2 ; {(1, 2) ; (2, 1)} B) R3 ; {(1, 2, 1) ; (2, 1, 1)} C) R2 de {(1, 2) ; (0, 0)}
E) R3 ; {(1, 0, 0) , (2, 0, 0)}
D) R2 ; {(1, 2) ; (2, 1) ; (1, 1)}
20. Aşağıdaki vektörlerden hangisi ~
x = (1, 2, 3) ve y
~ = (3, 3, 4) vektörleri tarafından
gerilen uzaydadır?
A) (2, 1, 1)
B) (1, 1, 1)
C) (2, 5, 1)
D) (2, 5, 4)
E) (1, 3, 1)
21. Aşağıdakilerden hangisi R3 ün bir tabanıdır?
A) {x, y, x + y} B) {(1, 1, 1) ; (1, −1, 2) ; (2, 0, 3)} C) {(1, 0, 0) ; (0, 1, 0) ; (1, 1, 0)}
D) {(1, 1, 0) ; (0, 1, 1)}
E) {(1, 1, 1) ; (1, 2, 1) ; (2, 1, 1)}
170
Analitik Geometri - Mustafa Özdemir
22. Aşağıdakilerden hangisi R2 nin bir ortogonal tabanıdır?
A) {(1, 1) ; (−1, 1)}
B) {(1, 1) ; (1, 2)}
C) {(1, 0) ; (1, 1)}
D) {(1, 1) ; (0, 1)}
E) {(1, 1) ; (2, 2)}
23. Aşağıdakilerden
R2 nin bir ortonormal tabanıdır?
½µ
¶ hangisi
µ
¶¾
5 12
3 4
A)
,
;
,
B) {(1, 1) ; (1, −1)}
C) {(1, 0) ; (1, 1)}
13
13
½µ
¶ µ 5 5¶¾
3 4
4 −3
D)
,
;
,
E) {(1, 1) ; (2, 2)}
5 5
5 5
24. R3 uzayında verilen ~
x, y
~ ve ~
z vektörleri için, c1 , c2 , c3 ∈ R olmak üzere,
x + c2 y
~ + c3 ~
z =~
0 eşitliği ancak ve ancak, c1 = c2 = c3 = 0 durumunda
c1 ~
sağlanıyorsa aşağıdakilerden hangisi yanlıştır?
A) ~
x, y
~, ~
z lineer bağımsız vektörlerdir.
B) det (~
x, y
~, ~
z ) 6= 0’dır.
D) ~
x, y
~, ~
z vektörleri R3 uzayını
C) {~
x, y
~, ~
z } kümesi R3 için bir tabandır.
gererler.
E) ~
x, y
~, ~
z vektörleri aynı düzlemdedir.
25. u
~ = (1, 2, 3) ve ~
v = (2, 3, 1) vektörleri tarafından gerilen düzlemin denklemi
hangisidir?
A) 2y − x = z
B) z = 5y − 7x
C) x + y = z
D) z = 4y − 5y
E) x + y + z = 6
26. ~
x = (1, 2, 1) , y
~ = (0, 1, 1), ~
z = (1, 1, 0) ve u
~ = (2, 3, 2) vektörleri tarafından
gerilen uzayın boyutu kaçtır?
A) 2
B) 1
C) 3
D) 0
E) 4
27. ~
x = (1, 2, 3, 1, 4) , y
~ = (1, 0, 3, 1, 2) vektörleri için, h~
x, y
~ i =?
A) 14
B) 16
C) 12
D) 19
E) 11
28. ~
x = (1, 2, 4, 2, −1) ve y
~ = (3, k, 2, k − 1, 5) vektörleri birbirine dik ise k =?
A) 4
B) 6
C) −2
D) 5
E) −1
29. ~
x = (1, 2, 3, 0, 1) ve y
~ = (3, 1, 2, 1, 0) vektörleri arasındaki açının kosinüsünü
bulunuz.
11
13
11
−11
14
B)
C)
D)
E)
A)
15
15
15
5
13
VEKTÖRLER
171
30. Aşağıdakilerden hangisi ~
x = (2, 1, 4) vektörüne dik değildir?
A) (2, 0, −1) B) (3, 2, −2) C) (−3, 2, 1) D) (1, 1, −2) E) (1, 2, −1)
x = (1, 1, k) , y
~ = (m, −1, 3) ve ~
z = (3, n, 1) vektörleri ikişer olarak
31. R3 uzayında ~
birbirlerine dik olduklarına göre, k kaçtır?
9
7
−7
−5
5
B)
C)
D)
E)
A)
8
8
8
8
8
32. k~
x+y
~ k = 7, k~
y k = 2 ve k~
x−y
~ k = 3 olduğuna göre, ~
x vektörünün uzunluğunu
bulunuz.
A) 4
B) 3
C) 2
D) 5
E) 1
33. k~
x+y
~ k = 5 ve k~
x−y
~ k = 3 olduğuna göre, h~
x, y
~ i değeri kaçtır?
A) 4
B) 3
C) 2
D) 5
E) 1
34. ~
x = (0, 1, 2, 2, 2) ve y
~ = (2, 2, 0, 2, 1) vektörleriyle oluşturulan paralelkenarın
alanını
bulunuz.
√
√
√
√
B) 5 10
C) 3 10
D) 105
E) 10
A) 101
35. Köşelerinin koordinatları A (1, 1, 1, 1) , B (1, 2, 3, 3) ve C (1, 2, 1, 3) olan üçgenin
alanını
√
√
√
√ bulunuz.
B) 5
C) 2 10
D) 10
E) 5
A) 2 5
36. ~
x =√(1, 3) ve y
~ = (3,√
1) vektörleriyle √
oluşturulan paralelkenarın
alanını bulunuz.
√
B) 2 2
C) 10
D) 63
E) 8
A) 2 5
37. Köşeleri A (3, 4, 4), B (1, 2, 3) ve C (2, 1, 4) olan üçgenin B açısının kosinüsünü
bulunuz.
√
√
√
√
√
2
3
3
3
2
B)
C)
D)
E)
A)
3
9
3
6
9
38. Köşelerinin koordinatları A (1, 1, 1, 1) , B (1, 2, 3, 3) ve C (3, 2, 1, 3) olan üçgenin
çevrel çemberinin alanını bulunuz.
81
27
81
27
81
B) π
C) π
D)
π
E) π
A) π
28
14
28
112
14
172
Analitik Geometri - Mustafa Özdemir
39. ~
x = (1, 2, 3, 4) vektörünün y
~ = (0, 1, 1, 1) vektörü üzerindeki dik izdüşüm vektörü
hangisidir?
5
3
9
3
~
C) y
~
D) y
~
E) y
~
A) 3~
y
B) y
2
2
10
11
40. ~
x = (1, 4, 2), y
~ = (2, 3, −1) olmak üzere, aşağıdaki vektörlerden hangisi ~
x×y
~
vektörüne paraleldir?
A) (2, 3, 1) B) (2, −1, 1) C) (1, 0, 5) D) (2, 1, −1) E) (2, −1, 1)
41. ~
x=
~ =√(2, 3, −1) ise√
k~
x×y
~ k kaçtır?
√
√ (1, 3, 2), y
B) 3 17
C) 3 19
D) 119
A) 115
E)
√
117
42. ~
x =√(1, 2, 3) ve y
~√
= (2, 3, 1) vektörleriyle
alanı kaçtır?
√
√oluşturulan paralelkenarın
√
B) 5 3
C) 3 5
D) 19
E) 2 17
A) 2 19
43. Aşağıdakilerden hangisi ~
x = (1, 2, 3) ve y
~ = (2, 3, 1) vektörlerinin her ikisine de
diktir?
A) (−5, 1, 1) B) (7, −5, 1) C) (3, 0, −1) D) (7, 5, −1) E) (7, 5, 1)
44. Aşağıdaki vektör ikililerinden hangisi ~
x = (3, −1, 4) vektörüyle aynı düzlemdedir
ve birbirine diktir?
A) (−5, 1, 1) , (1, 2, 3) B) (1, 2, 3) , (−3, 0, 1) C) (1, 1, 1) , (1, −3, 2)
D) (1, 2, 3) , (1, −2, 1) E) (1, 2, 3) , (0, −3, 2)
z = (2, 0, 3) vektörleriyle oluşturulan paralelyüzlünün
~ = (2, 3, 1) ve ~
45. ~
x = (1, 2, 3), y
hacmini bulunuz.
A) 19
B) 17
C) 18
D) 16
E) 9
46. [~
x, y
~, ~
z ], ~
x, y
~ ve ~
z vektörlerinin karma çarpımını göstermek üzere, [~
x, y
~, ~
z ] = 2 ise
[3~
x + 2~
y , 3~
y + 2~
z , 2~
z+~
x] =?
A) 24
B) 28
C) 14
D) 44
E) 22
e3 , y
~=~
e1 + 2~
e2 − 3~
e3 ve ~
z = 2~
e1 + ~
e3 vektörleriyle oluşturulan
47. ~
x = 3~
e2 + ~
paralelyüzlünün hacmi kaçtır?
A) 20
B) 30
C) 25
D) 15
E) 40
VEKTÖRLER
173
48. [~
x, y
~, ~
z ], ~
x, y
~ ve ~
z vektörlerinin karma çarpımını göstermek üzere, [~
x, y
~, ~
z ] = 0 ise
aşağıdakilerden hangisi ya da hangileri kesinlikle doğrudur?
I. ~
x, y
~ ve ~
z lineer bağımsızdırlar.
II. ~
x, y
~ ve ~
z aynı düzlemdedirler.
III. ~
x, y
~ ve ~
z hacim oluşturmazlar.
IV. ~
z vektörü ~
x ve y
~ vektörlerinin lineer bileşimi olarak yazılabilir.
V. ~
z vektörü, ~
x veya y
~ vektörlerinden birine paraleldir.
A) II,III ve IV B) Hepsi C) II,III,IV ve V D) II ve III E) II, III ve V
49. A (1, 0, 1) , B (1, 2, 3) , C (2, 1, 3) ve D (k, 1, 4) noktaları aynı düzlemde olduğuna
göre k kaçtır?
A) 2
B) 3
C) 4
D) 1
E) 0
50. ~
x = (−1, 2, 3), y
~ = (2, 3, 1) ve ~
z = (k, 1, −3) vektörleri aynı düzlemde ise, k =?
A) 3
B) 1
C) 4
D) 5
E) −2
51. Aşağıdakilerden hangisi ya da hangileri yanlıştır?
I. h~
u, ~
v × wi
~ = h~
u×~
v , wi
~
II. h~
u×~
v, ~
vi = 0
III. u
~ ×~
v⊥u
~
IV. u
~ //~
v ise u
~ ×~
v=0
V. h~
u×~
v , wi
~ = det (~
u, ~
v , w)
~
u
~
daima birim vektördür.
VI. u
~ 6= 0 iken
k~
uk
A) Yalnız IV
B) Yalnız II
C) II ve IV
D) II ve V
E) Hiçbiri
52. ~
x = (1, k, 3), y
~ = (1, 3, k) ve ~
z = (2, 0, 3) vektörleri lineer bağımlı ise k’nın
olabileceği değerlerin toplamı kaçtır?
−3
3
B) −3
C) 3
D) −
E) −2
A)
2
2
⎡
⎤
3 −2 −6
1
53. R = ⎣ −6 −3 b ⎦ matrisi ortogonal matris olduğuna göre, a + b + c =?
7
−2 a
c
A) 1
B) −5
C) −2
D) 3
E) −11
54. A (1, 1, 1) , B (1, 3, 2), C (2, 1, 2) ve D (2, 3, 6) noktalarının oluşturduğu
dörtyüzlünün hacmini bulunuz.
A) 6
B) 5
C) 2
D) 3
E) 1
KOORDİNAT DÖNÜŞÜMLERİ
Düzlemde bir koordinat sistemine göre verilen bir noktanın koordinatları, farklı bir
koordinat sistemine göre değişebilir. Verilen noktanın, her iki koordinat sisteminin koordinatları arasındaki geçiş bağıntılarını bulabilmek için, koordinat sisteminin eksenlerinin
nasıl değiştiğini bilmek gerekir. Yeni koordinat sistemi, eski koordinat sisteminin ötelenmesiyle döndürülmesiyle veya hem ötelenip hem de döndürülmesiyle elde edilebilir. Bu
bölümdeki amacımız, bir koordinat sistemine göre verilmiş bir noktanın, eksenlerin ötelenmesi veya döndürülmesi durumunda nasıl değişeceğini, ve yeni koordinat sistemindeki
koordinatının nasıl belirleneceğini incelemektir. Eksenlerin ötelenmesi ve dönmesinden
önce, noktanın ötelenmesi ve dönmesinden kısaca bahsedelim.
Noktanın Ötelenmesi
Düzlemde verilen herhangi bir noktanın, başka bir noktaya taşınmasına, noktanın
ötelenmesi denir. Düzlemde bir P (x, y) noktasını, P 0 (x + a, y + b) noktasına taşımak,
P noktasını x ekseninde a birim, y ekseninde de b birim ötelemek demektir. Bu hareketi,
n
(x, y) = (x + a, y + b)
T(a,b) : R2 → R2 , T(a,b)
dönüşümüyle tanımlayabiliriz. Bu dönüşümü vektörel olarak, P = (x, y) ve u
~ = (a, b)
olmak üzere,
~
Tun (P ) = P + u
biçiminde de yazmak mümkündür. Buradaki u
~ vektörüne öteleme vektörü denir.
Pı(x+a,y+b)
y+b
y
x+a
G
u =(a,b)
y
P(x,y)
x
Pı(x+a,y+b)
y+b
x
P(x,y)
x
x+a
x
Örnek 9.1 Düzlemde, P (2, 3) noktası veriliyor.
a) P noktasını, x ekseninde 3 birim, y ekseninde −2 birim öteleyen dönüşümü yazınız,
yeni noktanın koordinatlarını bulunuz.
b) P noktasını, u
~ = (3, 5) vektörü kadar öteleyiniz.
n
(x, y) = (x + a, y + b) öteleme dönüşümüdür. Buna göre,
Çözüm : a) T(3,−2)
n
T(3,−2)
(2, 3) = (2 + 3, 3 − 2) = (5, 1) ’dir.
b) Tun (P ) = P + u
~ = (x, y) + (3, 5) = (x + 3, y + 5) biçiminde yazabiliriz. Buna göre,
Tun (2, 3) = (5, 8) olur.
302
Analitik Geometri - Mustafa Özdemir
Örnek 9.2 y = 2x + 3 doğrusu, x ekseninde 3 birim, y ekseninde −2 birim ötelenirse denklemi ne olur?
Çözüm : 1. Yol. Doğru üzerinde iki nokta alarak
bunların
ötelemeden sonraki koordinatlarıyla, bu
y 6
iki noktadan geçen doğruyu bulalım. Koordinatlar
x0 = x + 3 ve y 0 = y − 2 şeklinde değişecek4
tir. Doğru üzerinde A (0, 3) ve B (1, 5) noktalarını
2
alalım. Ötelemeden sonra, bu iki noktanın koordinatları A0 (3, 1) ve B 0 (4, 3) olacaktır. A0 ve B 0
noktalarından geçen doğru ise,
-4
-2
2
4
6
x
x−3
y−1
-2
=
⇒ y = 2x − 5
3−1
4−3
bulunur. Bu ötelenmiş doğrunun denklemidir.
2. Yol. Koordinatlar x0 = x + 3 ve y 0 = y − 2 şeklinde değişeceği için, x = x0 − 3 ve
y = y 0 + 2 eşitliklerini doğru denkleminde yerine yazarsak,
y 0 + 2 = 2 (x0 − 3) + 3 ⇒ y 0 = 2x0 − 5
doğrusu elde edilir. Yani, doğrunun denklemi y = 2x − 5 olacaktır.
Örnek 9.3 (x − 1)2 +4(y − 2)2 = 4 elipsinin odaklarının koordinatlarını bulunuz.
y
3
Çözüm : x − 1 = x0 ve y − 2 = y 0 koordinat
dönüşümü uygularsak, elipsin denklemi :
2
(x0 )
2
+ (y 0 ) = 1
4
√
1
olur. √
Bu ötelenmiş elipsin odakları F10 ( 3, 0) ve
F10 (− 3, 0) olur. Şimdi, geri öteleyerek, orjinal
-2
-1
1
2
3
bulalım. Buna göre,
x elipsin odaklarını
-1
n
√
√
F10 ( 3, 0) ⇒ x = 3 + 1, y = 0 + 2
√
√
için F1 ( 3 + 1, 2) ve benzer şekilde, F2 (− 3 + 1, 2) elde edilir.
2
9.1 Alıştırma P (2, −4) noktası x ekseninde −3 br, y ekseninden 5 br ötelenirse koordinatları ne olur?
Yanıt : P 0 (−1, 1) .
9.2 Alıştırma y = 3x − 2 doğrusu, x ekseninde −2 birim, y ekseninde 3 birim ötelenirse denklemi ne olur?
Yanıt : y = 3x + 7.
303
KOORDİNAT DÖNÜŞÜMLERİ
9.3 Alıştırma (x + 1)2 − 4 (y − 2)2 = 4 hiperbolünün odaklarının koordinatlarını
bulunuz.
√
Yanıt : (± 5 − 1, 2).
Eksenlerin Ötelenmesi
y
y'
xoy dik koordinat sisteminde verilmiş
P = (x, y) koordinatlarını göz önüne alalım.
P = ( x1′, y1′ ) = ( x1 , y1 )
x eksenini h kadar, y eksenini de, k kadar
y1
ötelememiz durumunda, elde edilen koordinat
y1-k
sistemini x0 o0 y 0 ile gösterelim. Yani, ötelenx'
O ' x1-h
miş koordinat sisteminin orjini, eski koordinat
k
x
sistemine göre (h, k) olacaktır. Bu hareket
x1
O h
biraz önce gördüğümüz noktanın ötelenmesi
hareketinin tamamen tersi hareketidir. Eksenlerin bir yönde hareketi, noktanın koordinatının bu yönün tam aksi yönünde değişmesi demektir. P noktasının yeni koordinat sistemine göre koordinatları ne olacaktır? P noktasının xoy koordinat sistemindeki koordinatları (x1 , y1 ) ve x0 o0 y 0 koordinat sistemindeki koordinatları da (x01 , y10 ) olsun. Şekilden
de izlenirse,
½ 0
x1 = x1 − h
y10 = y1 − h
.
olacaktır. Tersine düşünürsek,
½
x1 = x01 + h
y1 = y10 + h
olur. Buna göre, öteleme dönüşümünü
T(h,k) : R2 → R2
T(h,k) (x, y) = (x − h, y − k)
biçiminde ifade edebiliriz. Bu dönüşüm 1-1 ve örten bir dönüşümdür.
Örnek 9.4 xoy koordinat sisteminde P (2, 3) olan koordinatın, x ekseninin 2 birim,
y ekseninin −1 birim ötelenmesiyle elde edilen yeni koordinat sistemindeki koordinatlarını bulunuz.
Çözüm : Yeni sistem x0 o0 y 0 olmak üzere, x0 = x − h = x − 2 ve y 0 = y − k = y + 1
biçiminde olacaktır. Buna göre,
x0 = 2 − 2 = 0 ve y 0 = 3 + 1 = 4
olacağından P = (0, 4) olacaktır.
304
Analitik Geometri - Mustafa Özdemir
Örnek 9.5 xoy koordinat sisteminde verilen y = 2x − 3 doğrusunun x ekseninin
2 birim, y ekseninin −1 birim ötelenmesiyle elde edilen yeni koordinat sistemindeki
denklemini bulunuz.
Çözüm : 1. Yol. y = 2x − 3 doğrusunun yeni
y 2
eksenleri kestiği noktaları bulalım. Yeni y eksenimiz
x = 2 doğrusu olacağından, x = 2 ve y = 2x − 3
doğrusu y = 2 · 2 − 3 = 1 noktasında kesişirler. Bu
-2
-1
1
2
3
4
nokta y = −1 noktasından 2 br uzaklıktadır. Diğer
x
yandan, yeni x eksenimiz olan y = −1 doğrusu da,
-2
doğruyu −1 = 2x − 3 ⇒ x = 1 noktasında keser
ve bu noktanın x = 2 ekseninden uzaklığı 1 br’dir.
-4
Doğrumuz yeni eksenleri, yeni orjine göre x0 = −1
ve y 0 = 2 noktalarında kestiğinden, doğrunun yeni
x0
y0
eksenlere göre denklemi :
+
= 1 yani, y 0 = 2x0 + 2 bulunur.
−1
2
2. Yol. x0 = x − 2, y 0 = y + 1 olduğundan, doğru denkleminde x = x0 + 2 ve y = y 0 − 1
yazılırsa, y 0 − 1 = 2 (x0 + 2) − 3 ⇒ y 0 = 2x0 + 2 elde edilir.
Örnek 9.6 x2 −2x + y 2 −6y = 0 denklemini eksenleri öteleyerek basitleştiriniz.
Çözüm : Denklemi öncelikle (x − 1)2 + (y − 3)2 = 10 formunda yazalım. Buna göre,
x0 = x − 1 ve y 0 = y − 3 yazılırsa, yani x ekseni 1 birim, y ekseni 3 birim ötelenirse,
x02 + y 02 = 10 haline gelir.
Örnek 9.7 x2 −2x + 2y 2 +4y − 1 = 0 koniğinin odaklarını bulunuz.
Çözüm : Denklemi (x − 1)2 +2 (y + 1)2 =4
formunda yazabiliriz. Buna göre, x0 = x − 1
ve y 0 = y + 1 ötelemesi yapılmalıdır. Bu
durumda denklem,
2
2
(y 0 )
(x0 )
+
=1
4
2
y
-2
1
-1
1
-1
2
3
-2
olur ki,
a2 = 4 ve b2 = 2 ve c2 = a2 − b2 = 2
-3
√
√
olacağından, x0 o0 y 0 eksenine göre odaklar F1 = (− 2, 0) ve F2 = ( 2, 0) bulunur.
O halde, xoy sisteminde odaklar, x = x0 + 1 ve y = y 0 − 1 eşitliklerinden,
√
√
F1 = (− 2 + 1, −1) ve F2 = ( 2 + 1, −1)
elde edilir.
4
x
305
KOORDİNAT DÖNÜŞÜMLERİ
Örnek 9.8 Odakları (1, 4) ve (1, 6) olan ve (3, 5) noktasından geçen elips denklemini
bulunuz.
Çözüm : Merkez odakların orta noktası olduğundan, (1, 5) olur. xoy sistemini x eksenini
1 br, y eksenini 5 br öteleyerek, x0 o0 y 0 sisteminde merkezil elips denklemini yazabiliriz.
Bu eksende odakların koordinatları F1 = (0, 1) ve F2 = (0, −1), yani c = 1 ve elips
denklemi de
2
2
(y 0 )
(x0 )
+ 2 =1
2
a
b
0 0 0
olacaktır. (3, 5) noktası da x o y sisteminde (2, 0) olur ki, bunu elips denkleminde yerine
yazarsak, a2 = 4 ve b2 = a2 + c2 = 5 olacaktır. O halde, elips denklemi
(y 0 )2
(x0 )2
+
=1
4
5
(x − 1)2 (y − 5)2
+
= 1 biçiminde yazarız.
4
5
√
Örnek 9.9 Odakları (1, 4) ve (3, 4) olan ve (2 + 1/ 2, 4) noktasından geçen hiperbol denklemini bulunuz.
Çözüm : Merkez odakların orta noktası olduğundan, (2, 4)’dür. xoy sistemini x eksenini
2 br, y eksenini 4 br öteleyerek, x0 o0 y 0 sisteminde merkezil hiperbol denklemini elde
edebiliriz. x0 = x − 2 ve y 0 = y − 4 koordinat dönüşümleriyle merkezil hiperbolün
odaklarını dolayısıyla da c’yi bulabiliriz. Buna göre, F1 = (0, 1) ve F2 = (0, −1) , yani
c = 1’dir. c2 = a2 + b2 olduğundan, istenen hiperbol denklemi
bulunur. xoy sisteminde ise bu denklemi
(x − 2)2 (y − 4)2
+
=1
a2
1 − a2
√ ¢
¡
formundadır. 2 + 1/ 2, 4 noktasını yerine yazarsak, a2 = 1/2 ve b2 = 1/2 elde ederiz.
O halde, hiperbol,
2 (x − 2)2 + 2 (y − 4)2 = 1
bulunur.
9.4 Alıştırma x2 − 2x − 4y 2 + 16y − 19 = 0 koniğinin odaklarını bulunuz.
√
Yanıt : (± 5 + 1, 2).
9.5 Alıştırma x2 + 4y 2 − 2x − 16y + 13 = 0 koniğinin odaklarını bulunuz.
√
Yanıt : (± 3 + 1, 2).
√ ¢
¡
9.6 Alıştırma Odakları (1, 3) ve (3, 3) olan ve 2, 3 + 2 noktasından geçen elips
denklemini bulunuz.
2
2
(y − 3)
(x − 2)
+
= 1.
Yanıt :
3
2
306
9.1
Analitik Geometri - Mustafa Özdemir
Teorem
Öteleme dönüşümü, uzunlukları, açıları ve alanları değiştirmez.
Kanıt : T(h,k) (x, y) = (x0 , y 0 ) = (x − h, y − k) öteleme dönüşümümünün uzunlukları
değiştirmediğini gösterelim. xoy koordinat sisteminde (x1 , y1 ) ve (x2 , y2 ) noktalarını
alalım. Bu iki nokta arasındaki uzunluğun
q
2
2
(x2 − x1 ) + (y2 − y1 )
olduğunu biliyoruz. Şimdi, bu noktaların, eksenlerin ötelenmesiyle elde edilen (x01 , y10 ) ve
(x02 , y20 ) koordinatları arasındaki uzunluğunu hesaplayalım.
q
q
(x02 − x01 )2 + (y20 − y10 )2 =
(x2 − h − x1 + h)2 + (y2 − k − y1 + k)2
q
=
(x2 − x1 )2 + (y2 − y1 )2
olduğu görülür. Yani, uzunluklar değişmez.
İkinci olarak açıların değişmediğini gösterelim. Bunun için xoy sisteminde iki doğru alıp
bunların arasındaki açının, doğruların x0 o0 y 0 sistemindeki denklemleri için de değişmediğini göstermeliyiz. xoy sisteminde
½
d1 : y = m1 x + n1
d2 : y = m2 x + n2
m1 − m2
bağıntısına sahip olduğunu
1 + m1 m2
biliyoruz. Doğruların ötelemeden sonraki denklemleri
½
d1 : y 0 + k = m1 (x0 + h) + n1
d2 : y 0 + k = m2 (x0 + h) + n2
doğrularını alalım. Aralarındaki açının tan θ =
olacaktır. Yani eğimler değişmeyecektir. Eğimler değişmediğinden
m1 − m2
tan θ =
1 + m1 m2
açısı da değişmez. O halde açılar da korunur.
Son olarak alanların değişmediğini gösterelim. Bunun için, bir üçgenin alanının değişmediğini göstermek yeterli olacaktır. (x1 , y1 ), (x2 , y2 ) ve (x3 , y3 ) noktalarını alalım. Bu
noktalarla oluşturulan üçgenin alanının
⎤
⎡
x1 y1 1
1
Alan = det ⎣ x2 y2 1 ⎦
2
x3 y3 1
olduğunu biliyoruz. Ötelemeden sonra alan:
⎡
x − h y1 − k
1⎣ 1
x2 − h y2 − k
Alan =
2 x −h y −k
3
3
⎤
1
1 ⎦
1
olacaktır. Determinat özellikleri gereği, üçüncü sütunun h katı birinci sütuna, k katı da
ikinci sütuna eklenirse, determinant değişmez ve bu baştaki determinanttır.
¥
307
KOORDİNAT DÖNÜŞÜMLERİ
Noktanın Döndürülmesi
Düzlemde verilen bir P (x, y) noktasının, orjin etrafında saat yönünün tersine θ açısı
kadar döndürülmesine, P noktasının dönme hareketi (dönüşümü) denir. Örneğin, P (2, 0)
noktasını, saat yönünün tersine 90◦ döndürürsek, P 0 (0, 2) noktası elde edilir. Dönme
dönüşümünde, noktanın orjine uzaklığı değişmez. Herhangi bir P (x, y) noktasını orjin
etrafında, θ açısı kadar döndüren dönüşümü:
Rθn : R2 → R2
ile göstereceğiz. Şimdi, θ ve P (x, y)’ye bağlı olarak Rθn dönüşümünü bulalım.
9.2
Teorem Düzlemde verilen bir P (x, y) noktasını, orjin etrafında θ açısı kadar,
saat yönünün tersine döndürüren dönme dönüşümü
ile ifade edilir.
Rθn (x, y) = (x cos θ − y sin θ, x sin θ + y cos θ)
Kanıt. P (x, y), noktasının orjine uzaklığı r
−−→
ve OP vektörünün x ekseniyle yaptığı açı α
olsun. Bu durumda,
y
x = r cos α, y = r sin α
yazılabilir. Noktanın döndürüldükten sonraki
koordinatları P 0 (x0 ,y 0 ) olmak üzere, P 0 (x0 ,y 0 )
−−→
noktasının da orjine uzaklığı r’dir. OP 0 vektörünün x ekseniyle yaptığı açı β ise,
Pı(xı, yı)
yı
r P(x,y) y β
θ r α xı
x x x0 = r cos β, y 0 = r sin β
yazılabilir. P ’den P 0 noktasına θ = (β − α) açısı kadar dönme hareketi yapılmıştır. Buna
göre, β = θ + α olacaktır.
ve
x0 = r cos β = r cos (θ + α) = (r cos α) cos θ − (r sin α) sin θ
= x cos θ − y sin θ
y0 = r sin β = r sin (θ + α) = (r cos α) sin θ + (r sin α) cos θ
= x sin θ + y cos θ
olduğundan,
elde edilir. Böylece,
bulunur.
½
x0 = x cos θ − y sin θ
y 0 = x sin θ + y cos θ
Rθn (x, y) = (x cos θ − y sin θ, x sin θ + y cos θ)
¥
308
Analitik Geometri - Mustafa Özdemir
Bu eşitliği matrislerle,
∙
¸ ∙
∙ 0 ¸
x
cos θ
x
n
= Rθ
=
y
sin θ
y0
− sin θ
cos θ
biçiminde yazabiliriz. Buradaki,
Rθn
=
∙
cos θ
sin θ
− sin θ
cos θ
¸∙
x
y
¸
¸
matrisine noktanın dönmesini gösteren, dönme matrisi denir. Bu matris bir ortogonal
matristir. Bu matrisin tersi
∙
¸
cos θ sin θ
n −1
(Rθ ) =
− sin θ cos θ
−1
matrisidir. (Rθn ) matrisi de, −θ açısı kadar dönmeyi ifade eder. Yani, bu matris düzlemde bir noktayı, orjin etrafında saat yönüne θ açısı kadar döndürür.
Sonuç : Noktanın döndürülmesini ifade eden bir dönme dönüşümünde, dönme yönü
belirtilmemişse, saat yönünün tersine dönme işlemi yapılır. Bu durumda, Rθn dönüşümü,
Rθn (x, y) = (x cos θ − y sin θ, x sin θ + y cos θ)
¸∙
¸
∙ 0 ¸ ∙
cos θ − sin θ
x
x
n
=
Rθ (x, y) =
sin θ cos θ
y
y0
şeklinde ifade edilir. Eğer, dönme saat yönünde olursa,
n
(x, y) = (x cos θ + y sin θ, −x sin θ + y cos θ)
R−θ
¸∙
¸
∙ 0 ¸ ∙
cos θ sin θ
x
x
n
=
(x, y) =
R−θ
− sin θ cos θ
y
y0
biçiminde ifade edilir.
√
Örnek 9.10 P (3, 3) noktası 60◦ döndürülürse yeni koordinatları ne olur?
Çözüm : Dönme yönü belirtilmediğinden, dönmeyi saat yönünün tersine yapacağız.
¸ ∙
¸
¸∙
∙
√
0
3
cos 60◦ − sin 60◦
√
√
=
Rθn (3, 3) =
sin 60◦
cos 60◦
3
2 3
√
¡
¢
elde edilir. O halde, dönme sonrasında yeni koordinatlar P 0 0, 2 3 olur.
Örnek 9.11 P (1,3) noktası 90◦ saat yönüne döndürülürse, koordinatları ne olur?
Çözüm : Dönme yönü saat yönüne olduğundan,
¸∙ ¸ ∙
¸∙ ¸ ∙
¸
∙
1
0 1
1
3
cos 90◦
sin 90◦
n
=
=
R−90◦ (1, 3)=
3
−1 0
3
−1
− sin 90◦ cos 90◦
elde edilir.
309
KOORDİNAT DÖNÜŞÜMLERİ
3
Örnek 9.12 P (2,3) noktası θ=arccos açısı kadar saat yönüne döndürülürse yeni
5
koordinatları ne olur?
Çözüm : Dönme saat yönünde olduğundan,
∙
cos θ
n
R−θ (x, y) =
− sin θ
sin θ
cos θ
¸∙
x
y
¸
3
4
3
eşitliğini kullanacağız. θ = arccos ise cos θ = ve sin θ = olacağından,
5
5
5
∙
¸∙ ¸ ∙
¸
3/5
4/5
2
18/5
n
Rθ (2, 3) =
=
−4/5 3/5
3
1/5
bulunur. O halde, P 0 (18/5, 1/5) bulunur.
√
Örnek 9.13 Bir P noktası 150◦ döndürüldükten sonraki koordinatları P 0 (-4, 2 3)
olduğuna göre, P noktasının koordinatlarını bulunuz.
Çözüm : Dönme yönü belirtilmediğinden, dönmeyi saat yönünün tersine düşüneceğiz.
Bu kez,
¸∙
¸
∙ 0 ¸ ∙
cos θ − sin θ
x
x
=
sin θ cos θ
y
y0
eşitliğinde, x0 , y 0 değerlerini biliyoruz ve x, y değerlerini bulacağız.
∙
¸
∙
¸∙
¸
12
cos 150◦ − sin 150◦
x
√
=
y
sin 150◦
cos 150◦
6 3
∙
¸
∙
¸ ∙ √ ¸
¸∙
◦
◦
−4
x
cos 150
sin 150
3 3
√
=
=
y
− sin 150◦ cos 150◦
2 3
−1
√
olduğundan, P (3 3, −1) bulunur.
Örnek 9.14 y = 2x doğrusu, saat yönüne 45◦ döndürülürse denklemi ne olur?
Çözüm : Dönme saat yönüne olduğu için,
∙ 0 ¸ ∙
¸∙
¸
x
cos 45◦
x
sin 45◦
=
y
y0
− sin 45◦ cos 45◦
y
4
2
y=2x
y=x/3
-4
-2
2
4
eşitliğini kullanacağız. Bu eşitliğe göre, x ve y’yi bu-2
x
lalım.
√ ∙
¸
∙
¸
¸
∙
¸ ∙
-4
2 x0 − y 0
x0
x
cos 45◦ – sin 45◦
=
=
◦
◦
0
sin 45
cos 45
y
x0 + y 0
y
2
√
√
2 0
2 0
(x + y 0 ) = 2
(x − y 0 ) eşitliğinden, y 0 = x0 /3 doğrusu
olduğundan, y = 2x ⇒
2
2
elde edilir.
310
Analitik Geometri - Mustafa Özdemir
Örnek 9.15 y = 2x − 1 doğrusu 45◦ döndürülürse denklemi ne olur?
Çözüm : Dönme açısı, saat yönünün tersine olduğundan,
¸∙
¸
∙ 0 ¸ ∙
cos 45◦ − sin 45◦
x
x
=
y
y0
sin 45◦
cos 45◦
yazılabilir. Fakat, bize x ve y değerleri gereklidir. O halde,
¸∙ 0 ¸ √ ∙
¸
∙
¸ ∙
2
(x0 + y 0 )
x
sin 45◦
x
cos 45◦
=
=
− sin 45◦ cos 45◦
y0
(−x0 + y 0 )
y
2
olacağından, y = 2x − 1 denkleminde yerine yazılırsa,
√
√
2
2 0
0
0
(−x + y ) = 2 ·
(x + y 0 ) − 1
2
2
√
eşitliğinden, y 0 = −3x0 + 2 doğrusu elde edilir.
Örnek 9.16 x2 −y 2 = 4 hiperbolü 45◦ döndürülürse denklemi ne olur?
Çözüm : Bir önceki örnekteki gibi, x ve y yerine,
∙
¸
∙
¸∙ 0 ¸
x
cos 45◦
x
sin 45◦
=
y
− sin 45◦ cos 45◦
y0
√ ∙
¸
2
(x0 + y 0 )
=
(−x0 + y 0 )
2
eşitlikliklerini yazacağız. Buna göre,
y
4
xy=-2
2
-4
-2
-2
2
x²-y²=4
4
x
-4
1
1 0
2
2
(x + y 0 ) − (−x0 + y 0 ) = 4
2
2
denklemi düzenlenirse, x0 y 0 = 2 denklemi elde edilir. O halde, x2 − y 2 = 4 hiperbolünün
45◦ döndürüldükten sonraki denklemi x0 y 0 = 2 denklemidir.
Örnek 9.17 x2 −3xy + y 2 = 1/2 eğrisi 45◦ döndürülürse denklemi ne olur? Bu
hangi koniktir? Bu koniğin döndürülmeden önceki odaklarının koordinatlarını bulunuz.
Çözüm : x ve y yerine,
∙
¸ ∙
x
cos 45◦
=
− sin 45◦
y
sin 45◦
cos 45◦
¸∙
x0
y0
¸
√ ∙
¸
2
(x0 + y 0 )
=
(−x0 + y 0 )
2
eşitlikliklerini yazacağız. Buna göre, yerine yazılıp düzenlenirse,
1
1
5
1
1
1 0
(x + y 0 )2 − 3 · (x0 + y 0 ) (−x0 + y 0 ) + (−x0 + y 0 )2 = (x0 )2 − (y 0 )2 =
2
2
2
2
2
2
eşitliğinden,
311
KOORDİNAT DÖNÜŞÜMLERİ
(x0 )2
− (y 0 )2 = 1
1/5
hiperbolü bulunur. Bu hiperbolün odakları, x0 oy 0 ne göre c2 = a2 + b2 = 1/5 + 1 = 6/5
eşitliğinden,
¡√ √ ¢
¡ √ √ ¢
6/ 5, 0 ve F20 − 6/ 5, 0
F10
elde edilir.
Şimdi, odakların gerçek koordinatlarını bulalım.
∙
¸ √ ∙
¸∙ 0 ¸
2
x
1 1
x
=
y
−1 1
y0
2
eşitliğinde, yerine yazarsak,
√ ∙
¸∙ √ √ ¸ ∙ √
¸
2
1 1
6/ 5
√15/5
F1 =
=
−1 1
0
− 15/5
2
√
¡ √
¢
ve benzer şekilde, F2 − 15/5, 15/5 elde edilir.
x2 − 3xy + y 2 = 1/2 hiperbolünün grafiği ve odakları
şekilde gösterilmiştir.
y
4
2
-4
-2
-2
2
4
x
-4
√
9.7 Alıştırma P (2 3, 6) noktası 30◦ döndürülürse yeni koordinatları ne olur?
√
Yanıt :(0, 4 3).
3
9.8 Alıştırma P (3, 5) noktası θ = arcsin açısı kadar saat yönüne döndürülürse yeni
5
koordinatları ne olur?
Yanıt : (27/5, 11/5).
√
9.9 Alıştırma y = 4x − 3 2 doğrusu 45◦ döndürülürse denklemi ne olur?
Yanıt : y0 = x0 + 2.
√
9.10 Alıştırma Bir P noktası 120◦ döndürüldükten sonraki koordinatları P 0 (4 3, 6)
olduğuna göre, P noktasının koordinatlarını bulunuz.
√
Yanıt : ( 3, −9).
9.11 Alıştırma x2 + y 2 + xy = 2 eğrisi 45◦ döndürülürse denklemi ne olur?
Bu hangi koniktir? Bu koniğin döndürülmeden önceki odaklarının koordinatlarını bulunuz.
√
√
√
√
(y 0 )2
(x0 )2
+
= 1, Elips, F1 (2 3/3, −2 3/3) ve F1 (−2 3/3, 2 3/3).
Yanıt :
4
4/3
9.12 Alıştırma xy = 3 eğrisi 45◦ döndürülürse denklemi ne olur?
Yanıt : y2 − x2 = 6.
312
9.3
Analitik Geometri - Mustafa Özdemir
Teorem
Dönme dönüşümü, uzunluğu, açıyı ve alanı korur.
Kanıt : P (x1 , y1 ) ve Q (x2 , y2 ) noktaları arasındaki uzunluğun
q
2
2
|P Q| = (x2 − x1 ) + (y2 − y1 )
olduğunu biliyoruz. Rθ , θ açısı kadar dönmeyi ifade etmek üzere,
P 0 = Rθ (P ) = ((cos θ) x1 − (sin θ) y1 , (cos θ) y1 + (sin θ) x1 )
Q0 = Rθ (Q) = ((cos θ) x2 − (sin θ) y2 , (cos θ) y2 + (sin θ) x2 )
noktaları arasındaki uzaklığı hesaplayalım.
q
2
2
0 0
|P Q | =
(cos θ (x2 −x1 ) − sin θ (y2 −y1 )) + (cos θ (y2 −y1 ) + sin θ (x2 −x1 ))
q
2
2
|P 0 Q0 | =
(x2 − x1 ) + (y2 − y1 )
|P 0 Q0 | = |P Q|
elde edilir. O halde, dönme dönüşümü uzaklığı değiştirmez.
ii) Şimdi de, dönme dönüşümünün açıları değiştirmediğini
görelim. y = m1 x+n1 ve y = m2 x+n2 doğrularını göz
önüne alalım. Bunlar arasındaki açı,
m1 − m2
tan θ =
1 + m1 m2
bağıntısıyla bulunabilir. Şimdi, bu doğruların θ açısı kadar
döndürülmesi durumunda, doğrular arasındaki açıyı bulalım. Doğruların, θ açısı kadar döndürülmesi durumunda
(x = (cos θ) x0 + (sin θ) y 0 ve y = (cos θ) y 0 − (sin θ) x0 )
dönüşümü yapılarak, doğru denklemleri sırasıyla,
y = m1 x + n1 ise, (cos θ) y 0 − (sin θ) x0 = m1 ((cos θ) x0 + (sin θ) y 0 ) + n1 ;
y = m2 x + n2 ise, (cos θ) y 0 − (sin θ) x0 = m2 ((cos θ) x0 + (sin θ) y 0 ) + n2
olur. Bu doğruların eğimleri de sırasıyla,
m2 cos θ + sin θ
m1 cos θ + sin θ
ve
cos θ − m1 sin θ
cos θ − m2 sin θ
bulunur. Buna göre,
m1 cos θ + sin θ m2 cos θ + sin θ
−
m1 − m2
cos θ − m1 sin θ cos θ − m2 sin θ
tan θ =
=
m1 cos θ + sin θ m2 cos θ + sin θ
1 + m1 m2
1+
cos θ − m1 sin θ cos θ − m2 sin θ
elde edilir. Böylece, dönme dönüşümünün, açıyı da değiştirmediği görülür.
313
KOORDİNAT DÖNÜŞÜMLERİ
iii) Son olarak, alanın da değişmeyeceğini görelim. P ve
Q noktaları ile doğrusal olmayacak şekilde bir T (x3 , y3 )
noktası verilsin. Bu durumda P, Q, T ile oluşturulan üçgenin alanı.
¯
¯
¯ x1 y1 1 ¯
¯
¯
1
Alan (P QT ) = ¯¯ x2 y2 1 ¯¯
2¯
x3 y3 1 ¯
ile bulunur. P, Q, T ’nin θ açısı kadar döndürüldükten sonraki koordinatları, P 0 , Q0 ve T 0 olsun.
olduğundan,
Rθ (x0i , yi0 ) = ((cos θ) xi − (sin θ) yi , (cos θ) yi + (sin θ) xi )
Alan (P 0 Q0 T 0 ) =
=
¯
¯
1 ¯¯
2 ¯¯
¯
¯
1 ¯¯
2 ¯¯
x01
x02
x03
y10
y20
y30
1
1
1
¯
¯
¯
¯
¯
¯
(cos θ) x1 − (sin θ) y1
(cos θ) x2 − (sin θ) y2
(cos θ) x3 − (sin θ) y3
eşitliğinde determinant özellikleri kullanılırsa,
¯
¯ x1 y1
¯
1
0 0 0
¯ x2 y2
Alan (P Q T ) =
2 ¯¯
x3 y3
¯
¯ x1 y1
1 ¯¯
x2 y2
=
2 ¯¯ x y
3
3
olduğu görülür.
(cos θ) y1 + (sin θ) x1
(cos θ) y2 + (sin θ) x2
(cos θ) y3 + (sin θ) x3
¯¯
¯ ¯ cos θ sin θ
¯¯
¯ ¯ − sin θ cos θ
¯¯
¯¯
0
0
¯
¯
1 ¯
1 ¯¯ = Alan (P QT )
1 ¯
1
1
1
0
0
1
¯
¯
¯
¯
¯
¯
1
1
1
¯
¯
¯
¯
¯
¯
¥
Eksenlerin Döndürülmesi
Şimdi verilen bir koordinat sisteminin, eksenlerinin başlangıç noktası etrafında saat
yönünün tersine θ açısı kadar döndürülmesi durumunda, eski ve yeni koordinat sisteminde
bir noktanın koordinatları arasındaki bağıntıları bulacağız. xoy dik koordinat sistemi verilsin. Bu koordinat sisteminin, saat yönünün tersine, başlangıç noktası etrafında θ açısı
kadar eksenleri döndürülmesiyle elde edilen koordinat sistemi x0 oy 0 olsun. Bu durumda,
herhangi bir noktanın koordinatları nasıl değişir, ya da bir eğrinin denklemi yeni koordinat
sisteminde nasıl ifade edilir. Bu kısımda bunların yanıtlarını arayacağız.
314
Analitik Geometri - Mustafa Özdemir
9.4
Teorem xoy dik koordinat sisteminde bir P (x1 , y1 ) noktası verilsin. Eksenlerin başlangıç noktası etrafında θ açısı kadar, saat yönünün tersine döndürürülmesi
durumunda, P (x1 , y1 ) noktasının, yeni koordinat sistemindeki koordinatlarını veren
dönme dönüşümü,
ile ifade edilir.
Rθ (x1 , y1 ) = (x1 cos θ + y1 sin θ, −x1 sin θ + y1 cos θ)
y
Kanıt.
Bir P noktasının koordinatlarını,
xoy sisteminde P (x1 , y1 ) ile döndürülerek
elde edilen x0 oy 0 koordinat sisteminde ise
P (x01 , y10 ) ile gösterelim. Eksenlerin döndürülmesi durumunda P noktasının orjine uzaklığı
değişmeyecektir. Bu uzaklığı r ile gösterelim.
P noktasının koordinatlarını xoy ve x0 oy 0 sisteminde sırasıyla,
x1
x01
P = ( x1′, y1′ ) = ( x1 , y1 )
y1
y1′
x1′
r
α
θ
θ
x'
x
x1
O
= r cos (α + θ) ve y1 = r sin (α + θ) ,
= r cos α ve y10 = r sin α
ile gösterebiliriz. İlk eşitliklerde trigonometrik açılımları kullanırsak,
½
x1 = r cos α cos θ − r sin α sin θ
y1 = r sin α cos θ + r cos α sin θ
olur. Burada, ikinci eşitlikler kullanılırsa,
½
x1 = x01 cos θ − y10 sin θ
veya
y1 = y10 cos θ + x01 sin θ
∙
x1
y1
eşitliği elde edilir. Son matris eşitliğinden de,
∙ 0 ¸ ∙
x1
cos θ
=
− sin θ
y10
¸
=
sin θ
cos θ
∙
cos θ
sin θ
¸∙
x1
y1
− sin θ
cos θ
¸∙
x01
y10
¸
¸
yazılabilir. Eksen dönüşümü sonrası, noktanın koordinatlarını veren dönme dönüşümü
Rθ (x1 , y1 ) = (x1 cos θ + y1 sin θ, −x1 sin θ + y1 cos θ)
biçiminde bulunur. Buna göre, koordinat eksenlerinin θ açısı kadar saat yönünün tersine
döndürülmesi durumunda, yeni nokta ile eski noktanın koordinatları arasındaki bağıntıları,
Rθ : R2 → R2
Rθ (x, y) = (x0 , y 0 ) = (x cos θ + y sin θ, −x sin θ + y cos θ)
¸∙
¸
∙ 0 ¸ ∙
cos θ sin θ
x
x
=
Rθ (x, y) =
− sin θ cos θ
y
y0
dönme dönüşümü ile elde edebiliriz. Eksen dönmesinin θ açısı kadar saat yönüne doğru
yapılması demek, eksenlerin saat yönünün tersine −θ açısı kadar dönme anlamına gelecektir. Döndürme yönü belirtilmemiş ise, yön saat yönünün tersine anlaşılacaktır.
¥
KOORDİNAT DÖNÜŞÜMLERİ
315
Not ! Eksenlerin döndürülmesi hareketi, noktanın döndürülme işleminin tam tersi
bir harekettir. Yani, eksenler θ açısı kadar dönerken, nokta, sanki geriye doğru θ açısı
kadar dönüyormuş gibi davranır. Bu tıpkı, hareketsiz bir arabanın içinde bulunan bir
kişinin, yan tarafında ileri doğru hareket eden arabayı görünce, geriye doğru hareket
ettiğini zannetmesi gibidir. Bu nedenle, noktaya göre dönmeyi ifade eden dönme matrisiyle, koordinat eksenlerinin dönmesini ifade eden dönme matrisi birbirlerinin tersidir.
Örnek 9.18 P (0, 2) noktasının, eksenlerin 60◦ döndürülmesi durumunda koordinatları ne olur?
√
Çözüm : Bu noktanın koordinatlarının ( 3, 1) olduğu, çizilerek görülebilir. Bunun
yanında,
√
¸∙ ¸
¸∙
¸
∙ 0 ¸ ∙
∙ 0 ¸ ∙
0
cos 60◦
x
x
1/2
x
sin 60◦
3/2
√
=
⇒
=
2
y
y0
− sin 60◦ cos 60◦
y0
− 3/2 1/2
√
eşitliğinden de, R60◦ (0, 2) = ( 3, 1) olarak bulunabilir.
Örnek 9.19 xoy dik koordinat sisteminde verilen P (x, y) noktasının, eksenlerin
1
θ = arctan kadar saat yönünün tersine döndürülmesi durumundaki koordinatları
¡ √ √ ¢3
2 10, 10 olduğuna göre, P noktasının koordinatlarını bulunuz.
√
√
Çözüm : θ = arctan 1/3 ise tan θ = 1/3, sin θ = 1/ 10 ve cos θ = 3/ 10 olacaktır.
Eksen dönmesi söz konusu olduğundan,
√
√ ¸∙
∙ 0 ¸ ∙
¸
¸∙
¸
∙ √ ¸ ∙
x
3/ √10 1/√10
x
cos θ sin θ
x
2√ 10
=
=
⇒
y
− sin θ cos θ
y
y0
10
−1/ 10 3/ 10
eşitliğini kullanacağız. Buna göre, P (x, y) noktası,
√ ¸∙ √ ¸ ∙ ¸
∙
¸ ∙ √
x
3/√10 −1/√ 10
2√ 10
5
=
=
y
5
10
1/ 10 3/ 10
elde edilir.
Örnek 9.20 x2 −y 2 = 4 hiperbolünün eksenlerin 45◦ döndürülmesi durumundaki
denklemi ne olur?
Çözüm : Denklemde
∙
¸ ∙
¸
¸ ∙ √
x
(cos 45◦ ) x0 − (sin 45◦ ) y 0
2 (x0 − y 0 ) /2
√
=
=
y
(cos 45◦ ) y 0 + (sin 45◦ ) x0
2 (x0 + y 0 ) /2
yazılırsa,
¡√
¢2 ¡√
¢2
2 (x0 − y 0 ) /2 −
2 (x0 + y 0 ) /2 = 4
eşitliğinden, x0 y 0 = −2 elde edilir.
316
Analitik Geometri - Mustafa Özdemir
Örnek 9.21 xy = 3 hiperbolünün eksenlerin 45◦ döndürülmesi durumundaki denklemi ne olur?
Çözüm : Denklemde
¸
¸ ∙ √
∙
¸ ∙
2 (x0 − y 0 ) /2
x
(cos 45◦ ) x0 − (sin 45◦ ) y 0
√
=
=
(cos 45◦ ) y 0 + (sin 45◦ ) x0
y
2 (x0 + y 0 ) /2
√
√
2 0
2 0
(x − y 0 )
(x + y 0 ) = 3 eşitliğinden x02 − y 02 = 6 bulunur.
yazılırsa,
2
2
3
9.13 Alıştırma P (5, 10) noktasının, eksenlerin θ = arccos kadar döndürülmesi du5
rumunda, yeni koordinat sisteminde koordinatları ne olur?
Yanıt : (11, 2) .
9.14 Alıştırma x2 + y 2 + xy = 2 eğrisinin eksenlerin 45◦ döndürülmesi durumunda,
yeni koordinatlara göre denklemi ne olur?
Yanıt : 3(x0 )2 + (y 0 )2 = 4.
√
9.15 Alıştırma y = x + 2 3 doğrusunun eksenlerin 60◦ döndürülmesi durumunda
eğimi ne olur?
√
1− 3
√ .
Yanıt : m =
1+ 3
Afin Dönüşüm
A tersinir bir kare matris olmak üzere, f (~
x) = A~
x + ~b formundaki dönüşümlere
Afin dönüşüm denir. Düzlemde bir afin dönüşüm, A = [aij ]2×2 tersinir bir matris ve
~b = (b1 , b2 ) olmak üzere, ~
x = (x1 , x2 ) için,
¸∙
¸ ∙
¸
∙
x1
b1
a11 a12
~
+
f (~
x) = A~
x+b=
a21 a22
x2
b2
şeklinde tanımlanır. f (~
x) = y
~ ise, A−1 tanımlı olduğundan
y − ~b)
A~
x + ~b = y
~ ⇒ A~
x=y
~ − ~b ⇒ ~
x = A−1 (~
eşitliğinden, y
~ vektörü verilmiş ise, ~
x vektörü de bulunabilir. Yani, f −1 de tanımlıdır ve
bir afin dönüşümün tersi de bir afin dönüşümdür. Öteleme ve dönme dönüşümleri birer
özel afin dönüşümlerdir. Gerçekten,
x) = I~
x + ũ
Tu (~
öteleme dönüşümünde, A = I birim matrisi tersinir∙ bir matristir ve ~b¸ = u
~ öteleme
cos θ − sin θ
vektörüdür. Rθ (~
x) = Rx dönme dönüşümünde, R =
matrisi tersinir
sin θ cos θ
bir matristir ve dönme dönüşümü de bir afin dönüşümdür.
317
KOORDİNAT DÖNÜŞÜMLERİ
Teorem
9.5
Afin dönüşümlerin bileşkesi de afin dönüşümdür.
Kanıt : f (~
x) = A~
x +~
a ve g (~
x) = B~
x + ~b iki afin dönüşüm olsun. Buna göre,
(g ◦ f ) (x) = g (f (x)) = B (A~
x+~
a) + ~b = (BA) ~
x + (B~
a + ~b)
olacaktır. A ve B matrisleri tersinir olduğundan, BA matrisi de tersinirdir. O halde, g ◦ f
dönüşümü de bir afin dönüşümdür.
¥
Afin dönüşümler, genel olarak uzaklığı korumazlar. Fakat, aşağıdaki teoremde ifade ettiğimiz gibi, doğru parçaların uzunlukları arasındaki oranı korurlar.
9.6
Teorem f (~x) = A~x + ~b bir afin dönüşüm olsun. f dönüşümü,
a) doğruları doğrulara götürür.
b) paralel doğruları paralel doğrulara götürür.
c) İki paralel doğru parçası arasındaki oranı korur.
→
→
Kanıt : a) P noktasından geçen ve doğrultusu −
u olan : P + t−
u doğrusunu alalım.
→
−
→
−
→
−
→
f (P + t u ) = A(P + t u )+ ~b = (AP + ~b) + t(A u ) = (P ) + t−
u
1
1
olur. Yani, f afin dönüşümü, doğrusunu, P1 = AP +~b noktasından geçen ve doğrultusu
→
(A−
u ) olan bir doğruya dönüştürür.
→
→
u doğrusu ile bu doğruya paralel
b) P noktasından geçen ve doğrultusu −
u olan 1 : P + t−
→
−
olan Q noktasından geçen 1 : Q + t u doğrusunu alalım. a)’dan,
→
→
→
→
f (P + t−
u ) = (AP + ~b) + t(A−
u ) ve f (Q + t−
u ) = (AQ + ~b) + t(A−
u)
→
−
elde edilir. Yani, elde edilen doğruların doğrultmanları A u vektörüdür. Böylece, afin
dönüşümlerin, paralel doğruları yine paralel doğrulara dönüştürdüğü görülür.
→
→
c) D1 ve D2 paralel iki doğru parçası olsun. Buna göre, λ ∈ R, −
u 2 = λ−
u 1 olmak üzere,
→
−
→
−
:
P
+t
u
ve
D
:
P
+t
u
biçiminde
yazılabilir.
D
t ∈ [0, 1] için,
D
1
1
1
2
2
2
1
°→doğru
° parçasının
°→ °
°→ °
u 1 ° olduğundan,
u 2 ° = |λ| °−
uzunluğu °−
u 1 ° ve D2 doğru parçasının uzunluğu ise °−
D1 ve D2 doğru parçalarının uzunlukları oranı λ’dır. Şimdi, f afin dönüşümü altında, bu
doğru parçalarının uzunluklarını bulalım.
→
→
u 1 ) = (AP1 + ~b) + t(A−
u 1 ), t ∈ [0, 1],
f (D1 ) = f (P1 + t−
→
−
→
−
→
~
u ), t ∈ [0, 1],
f (D ) = f (P + t u ) = (AP + b) + t(A u ) = (AP + ~b) + tλ(A−
2
2
2
2
2
2
olduğundan, f (D1 ) ve f (D2 ) doğru parçalarının uzunluğu sırasıyla,
° ° → ° ° −
°
° −
° → °
°A→
u 1 ° ve °A−
u 2 ° = °λA→
u 1 ° = |λ| °A−
u 1°
1
olur. Doğru parçalarının uzunlukları oranı yine λ olduğundan, afin dönüşümün, doğru
parçalarının uzunlukları arasındaki oranı değiştirmediği görülür.
¥