LİNEER OLMAYAN DENKLEM
SİSTEMLERİNİN SAYISAL ÇÖZÜM
YÖNTEMLERİ VE UYGULAMALARI
LİNEER OLMAYAN DENKLEMLERİN KÖKLERİNİN BULUNMASI
lineer olmayan denklem veya denklem sistemlerinin sayısal çözümleri için
geliştirilmiş yöntemlarden bazıları tek bir denklem için , bazıları denklem
sistemleri için geliştirildiği halde , bazıları da her iki durumda uygulanabilir. Bu nedenlerle bu
konudaki çözüm yöntemlerini lineer olmayan denklem için uygulananlar ve denklem
sistemleri için uygulananlar olmak üzere iki kısımda inceleyeceğiz.
Kök bulma işlemi , sürekli bir fonksiyon olan f(x) verildiğinde , f( x k ) = 0 eşitliğini
sağlayan x = x k değerlerini bulma işlemi olarak tanımlanmaktadır. Kök bulma işlemlerinde
genellikle kökün hangi iki değer arasında olduğu belirlenerek kök bulma işlemi
gerçekleştirilir.Bu aralığın belirlenmesi ise ya doğrudan verilir ya da bilgisayar programları
aracılığı ile belirlenir.
Eğer ( x a ) ve ( x b ) gibi farklı sayılarla belirlenen ( x a x k x b ) aralığında tanımlı f(x)
fonksiyonu bu aralıkta sürekli ve f( x a ) .f( x b ) 0 ise o taktirde öyle bir ( x k ) değeri vardır ki ;
x a x k xb
f( x k ) = 0
eşitliğini sağlar.
Bu ( x k ) değeri eşitliği sağlayan bir değer olup denklemin kökü olarak bilinmektedir.
Kök bulma işlemi , denklemleri sağlayan bu bağımsız değişkenlerin araştırılması şeklinde
düşünülebilir. Sayısal çözümlemeler geliştirilmeden önce denklemlerin köklerinin bulunması
için çeşitli yollar kullanılırdı. Bunların bazısı 2. dereceden denklem köklerinin bulunmasında
olduğu gibi doğrudan hesaplanabilen formüller kullanılmaktaydı. Ancak birçok denklemin
kökleri böyle basitçe bulunamamakta ya da deneme yanılma ile uzun denemeler sonunda kök
değerine ulaşılmaktaydı.. Bazı denklemlerde ise analitik çözüm yapılamamakta ancak
yaklaşık çözümler kullanılmaktaydı.
Köklerini araştıracağımız denklemlerin karşımıza nasıl çıkacağını bilemeyiz. Ancak
bir genelleme ile olaya yaklaşacak olursak , cebirsel , trigonometrik , üstel veya logaritmasal
eşitlikler şeklinde karşımıza çıkabileceği görülür. Köklerin bulunmasında açık yöntemler
olarak bilinen yöntemlerde kökü kapsayan bir aralık belirlenmesi gerekmez. Bu yöntemlerin
kullanımı oldukça kullanışlı olmasına karşın sonuca her zaman götürmeyebilir. Bunlar Basit
İterasyon , Newton - Raphson ve Sekant yöntemleri gibi yöntemlerdir. Açık yöntemlerin işe
yaramadığı durumlarda Grafik , Aralık Yarılama ve Regula Falsi yöntemleri kullanılmaktadır.
1) ARALIK YARILAMA YÖNTEMİ
Bu yöntem eşitliğin kökünün bulunduğu aralığın verilmesinden veya tespit edilmesinden
sonra bu aralığı sürekli azaltarak köke yaklaşma esasına dayanmaktadır. Verilen noktalardan
birisi eşitliği negatif diğeri ise pozitif değerli yapmaktadır. Bir başka deyişle fonksiyon bu iki
nokta arasında bir veya birden fazla noktada işaret değiştirmektedir. Amaç bu işaret değiştiren
noktalardan en az birini bulmaktır. Bu yöntemin temel kuralı farklı işarette değerler üreten
bağımsız değişken değerlerinin ortasını alarak bu yeni noktadaki fonksiyonun işaretini
kullanarak sonuca gitmeyi hedeflemektedir. Elde daima farklı işarette fonksiyon değeri üreten
iki değer bulunmaktadır. Bu iki değer arasındaki fark veya aralık istenilen hassasiyete
ulaşıncaya kadar yarılama işlemi sürdürülür. Aralık istenilen hassasiyete ulaşınca işlem
durdurulur.
Başlangıç noktalarını sırasıyla alt nokta olarak ( x a ) ve üst nokta olarak ( x u ) şeklinde
gösterecek olursak , bunlara karşılık gelen fonksiyon değerleri de sırasıyla f( x a ) ve f( x u )
şeklinde olacaktır. Bu başlangıç noktalarının doğru seçilip seçilmediği aşağıdaki eşitliğin
sağlanmasıyla anlaşılmış olur.
f( x a ).f( x u ) 0
Bu başlangıç şartı sağlanıyorsa bir sonraki adım bu iki başlangıç noktasının ortasında
yeni bir noktayı bularak bu noktaya karşılık gelen fonksiyon değerini hesaplamaktır.
Başlangıç değerlerinin orta noktası aşağıdaki eşitlikle bulunmaktadır.
x a xu
2
Bu aşamada ( x y ) noktası için fonk değeri hesaplanarak bu yeni değer olan f( x y )
xy =
değerinin önceki değerler olan f( x a ) ve f( x u ) dan hangisi ile farklı işarette olduğu araştırılır.
Hangisi ile farklı işarette ise o değeri sağlayan nokta alınarak işlem ardışık olarak sürdürülür.
Bu yöntemin çalışma esası aşağıdaki algoritma ile özetlenebilir. Bu algoritmadan da
görüleceği üzere uygulamaya başlamadan önce elimizde başlangıç noktaları ( x a ) , ( x u ) ve
YAKINSAMA KRİTERİ MUTLAK HATA ( ) BÜYÜKLÜĞÜ BİLİNMELİDİR.
a) Başlangıç noktaları veya aralık ( x a ) , ( x u ) ve mutlak hata ( ) değeri bilindiğine
göre f( x a ) ve f( x u ) değerleri hesaplanır.
b) f( x a ).f( x u ) 0 olup olmadığı kontrol edilir.
c) Yeni yaklaşık kök ( x y ) bulunarak ve f( x y ) hesaplanır.
x a xu
f( x y ) = ?
2
d) Eğer f( x a ).f( x y ) 0 ise x u = x y değilse x a = x y alınır.
xy =
e) Eğer f ( xa ) f ( xu ) veya xa xu ise adım f ye değilse c ye gidilir.
f) Kök ( x y ) dir yazılır ve program durdurulur.
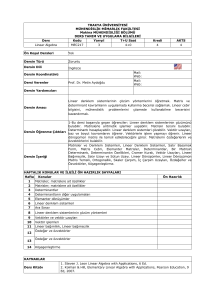
Aşağıdaki şekilden anlaşılacağı gibi birinci adımda ( x a ) ile ( x u ) nun ortalaması alınmışve
köke yakın bir noktaya gelinmiştir. İkinci adımda ise farklı işarette fonksiyon değeri üreten
( x a ) ile ( x y ) noktalarının ortalaması alınmış ve kök değerine daha da yaklaşılmıştır. Bu işlem
sürdürüldüğünde , asıl amaç olan fonksiyonun (x) eksenini kestiği noktaya git gide
yaklaşılmaktadır.
y
f(x)
2
1
xa
x
xy
xu
ÖRNEK : h(x) = xsin(x) fonksiyonunun çözümünü [0,1] aralığında h(x) = 1 olana
kadar iterasyonu yapınız.
f(x) = xsin(x)-1 olur. Ve a 0 = 0 , b0 = 2 dir.
f(0) = -1,000000
f(2) = 0,818595
ve [0,2] aralığında f(x) = 0 dır.
c0 1 orta noktada f(1) = -0,158529 bulunur.
Şimdi aralığımız [1,2] dir.
a1 c0 veb1 b0 alınır ve buradan c1 1,5vef (c1 ) 0,496242 dir.
f(1) = -0,158529 ve f(1,5) = 0,496242 buradan da yeni aralık [1 , 1.5 ] olur.
a2 a1veb2 c1 yazılır.
Bu şekilde devam edildiğinde r = 1,114157141 ‘ e ulaşılır.
2) REGULA FALSİ (KİRİŞ DEĞİŞTİRME ) YÖNTEMİ
Bu yöntem de aralık yarılama yöntemiyle aynı esasa dayanmaktadır. Ancak bu defa farklı
işarete sahip f( x 0 )ve f( x1 ) değerlerini veren x 0 ve x1 apsisleri arasındaki x 2 noktası f(x) in
f( x 0 ) ve f( x1 ) den geçen kirişinin x eksenini kestiği nokta olarak kabul edilmekte ve f( x 2 )
hesaplanarak bu değer f( x1 ) ve f( x 0 ) dan hangisi ile aynı işarette ise onun yerine konularak
istenilen hata düzeyine kadar işlem tekrar edilir.
Bu yöntemde gerçek köke yakınsama yavaştır , fakat daima yakınsama
olduğundan basit iterasyon ve Newton - Raphson yöntemlerine göre daha avantajlıdır
İterasyon için kökün hangi aralığa düştüğü bilinmesi gerekir. Kök ya ( x 0 , x 2 ) ya da
( x 2 , x1 ) aralığındadır. Bunu anlamak için . f( x M ) nin işaretine bakılır.
Eğer , f( x 0 ).. f( x 2 ) 0 ise kök ( x 2 , x1 ) aralığındadır.
Aksi halde f( x 0 ).. f( x 2 ) 0 ise kök ( x 0 , x 2 ) aralığındadır denir.
y
f(x)
y1
x0
x2
x
x1
y2
y0
1.kiriş
2.kiriş
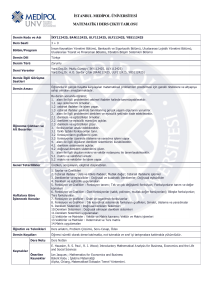
Yukarıdaki şekilde fonksiyon ( x 0 ) ve ( x1 ) noktalarından geçen 1. kiriş yatayda x 2
noktasını keser ve bu nokta bizim başlangıç değerimiz olur. Bu noktaya karşılık gelen f( x 2 )
değeri bulunarak yeni bir kiriş yani 2. kiriş çizilir. Bu işlem ardışık olarak sürdürüldüğünde
fonksiyonun yatay ekseni kestiği noktaya yaklaşıldığı görülür. Şekildeki 1. kirişin denklemi
aşağıdaki eşitlik şeklinde yazılabilir.
y0 y1
y- y 0 =
.(x- x 0 ) 1. kirişin x eksenini kestiği noktada y= 0 olduğu için eşitlik
x0 x1
aşağıdaki eşitliğe dönüşür .
y=0
x x0
x = x2 = x0 - 1
.( y 0 ) elde edilir.
y1 y0
x 2 için f( x 2 ) = y 2 belirlenir.Böylece ortaya çıkan yeni kirişin x eksenini kestiği nokta
araştırılır. Benzer adımlar sürdürüldüğünde aşağıdaki eşitlik bulunur:
x x0
x3 = x 0 - 2
( y 0 ) Bu art arda eşitlikler genel bir ifade şeklinde düzenlenecek
y2 y0
olursa aşağıdaki eşitlik yazılabilir. Bu eşitlik kiriş yönteminin uygulanmasında aşamalı olarak
kök değerini elde edebileceğimiz genel tanımlamadır:
xn1 x0
x n x0
.( y 0 )
y n y0
Bu işlemler esnasında kök değerine ulaşılıp ulaşılmadığı son iki kök değeri arasındaki
farktan yani mutlak hatadan anlaşılabilir.
xn1 xn y
xk xn1
ÖRNEK : Yine aynı örneği ele alırsak yani f(x) = xsin(x) -1 = 0 ‘ ı bunu regula falsi ile
çözelim :
Aralığımız [0,2] idi. a 0 = 0 , b0 = 2 dir.
f(0) = -1,000000
f(2) = 0,818595
0,81859485(2 0)
c0 2
1,09975017 ve f( c0 ) = -0,02001921
0,81859485 (1)
[ c0 ,b0 ]=[1,09975017 ;2 ] ve a1 c0 veb1 b0
0,81859485(2 1,09975017)
c1 2
1,12124074 ve f( c1 ) = 0,00983461
0,81859485 (0,02001921)
Şimdi f(x) [ a1 , c1 ] = [1,09975017 , 1.12124074]
a2 a1 , b2 c1 dir. Hesaplamalarımızın özeti aşağıdaki tabloda gösterilmiştir:
ck
ak
bk
ck
k
0
1
2
3
0
1,09975017
1,09975017
1,09975017
1,09975017
1,12124074
1,1141612
1,1415714
2
2
1,12124074
1,1141612
f( )
-0,02001921
0,00983461
0,00000563
0
3) BASİT İTERASYON YÖNTEMİ
Bu yöntemde kökü bulunacak f(x) = 0 denklemini uygun bir şekilde parçalayarak onun yerine
y1 = g(x) ve y 2 = h(x) şeklinde iki eşitlik kullanılarak oluşturulan sistem ardışık olarak
çözülür. Burada parçalanan denklemin parçaları olan g(x) ve h(x) için aşağıdaki eşitlik yazılır
:
f(x) = g(x) - h(x) = 0
Bunu yapmakla çözülecek denklem sayısı ikiye çıkarılmış ancak denklemler daha basit hale
indirgenmiştir.Hatta bunlardan birisi doğrudan x ' e eşit olabilir veya x ' e göre çözüllebilir.
Yöntemin uygulanmasında köke yakın bir başlangıç değeri ( x 0 ) ile iterasyona başlanır.
Birinci denklem ya x 0 a eşittir ya da x 0 yerine konularak x1 değeri bulunur. İkinci eşitlikte x1
kullanılarak x 2 hesaplanır ve bu işlem istenilen yaklaşık köke ulaşılıncaya kadar devam
ettirilir. Bu anlattıklarımızı basit bir algoritmayla özetlersek :
a) Başlangıç değerini ( x 0 ) seç.
b) F(x) fonksiyonunu g(x) = h(x) yani g(x)-h(x) = 0 şeklinde ifade et.
Bunlardan g(x) =x böylece g(x) = x 0 olacak şekilde tanımlanması uygun olur.
c) x1 = h( x 0 ) değerini hesapla
d) Hata = x1 x0 değeri hesapla
e) Hata istenilen hata değerinden büyükse x 0 = x1 al ve c adıma geri dön ,
değilse e. adıma git
f) x1 değerini yaz ve dur
Eşitliğin ikiye bölünmesi bu eşitliğin kök değeri olan x k gibi bir değerin de iki eğrinin
kesişmesi anlamına gelmektedir. Fonksiyonların g(x) ve h(x) , kesiştikleri bu nokta
fonklsiyonu sıfır yapan değerdir.
NOT : h(x) fonksiyonunun eğiminin mutlak değerinin g(x) fonksiyonunun eğiminden küçük
olması halinde yakınsama olmaktadır. Basit iterayon yöntemi doğrusal yakınsama özelliğine
sahiptir.
g ' ( x) 1 olmalı ki yakınsama olabilsin.....
ÖRNEK : x 0 = 0,5 ve x n 1 = e ( xn ) n= 0,1,……..
için çözünüz.
x2 e ( 0,606531) = 0,545239
x4 e ( 0,579703) = 0,560065
.
.
.
.
x1 = e (0,50000) = 0,606531
x3 e ( 0,545239) = 0,579703
.
.
.
.
.
.
x9 e ( 0,566409) = 0,567560
.
x10 e ( 0,567560) = 0,566907
lim x n = 0,567143…
x
0,567143….= e
(0 , 567143...)
4) NEWTON - RAPHSON YÖNTEMİ
Eşitlik köklerinin bulunmasında en yaygın kullanılan yöntemlerden birisi de
Newton - Raphson yöntemidir. Yöntemin temeli aşağıdaki şekilde gösterildiği gibi başlangıç
değerinin fonksiyonu kestiği noktada çizilen teğetin yatay ekseni kestiği yeni nokta başlangıç
değeri ile değiştirilerek köke yaklaşmaya çalışmaktır. Bu yeni nokta çoğu zaman başlangıç
değerine göre daha yaklaşık bir köktür. Taylor serisi açılımından hareketle Newton - Raphson
yöntemi yakınsama ifadesi aşağıdaki şekilde elde edilebilir.
f( x 0 + h) = f( x 0 ) + f '( x 0 ).
f(x) = 0
x = x0 + h
h
1!
h = ( x - x0 )
Burada yukarıdaki eşitlikler kullanılarak ilk eşitlik aşağıdaki şekilde yeniden düzenlenebilir.
f(x) = f( x 0 ) + (x- x 0 ).f ' ( x 0 ) = 0.0
f ( x0 )
f ' ( x0 )
f ( x0 )
x = x0 f ' ( x0 )
Son bulunan eşitlik başlangıç değeri , fonksiyon değeri , ve fonksiyonun başlangıç değeri ile
elde edilen türevi kullanılarak elde edilen yeni yaklaşık kök değeridir. Bu ifadeyi
genelleştirerek bir iterasyon ifadesi şeklinde aşağıdaki eşitlik şeklinde yazılabilir.
h = x - x0 = -
xn1 xn
f ( xn )
f ' ( xn )
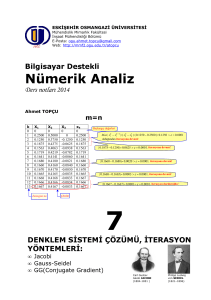
Bir başka yaklaşımla (f( x 0 ) , x 0 ) noktasındaki teğetin eğimi aşağıdaki eşitlik şeklinde olduğu
bilinmektedir. Bu eğim fonksiyon değerinin , başlangıç değeri ( x 0 ) ile yeni yaklaşık değer
( x1 ) farkına oranı şeklinde yazılabilir.
Tan ( 1 ) =
f ( x0 )
= f ' ( x0 )
( x0 x1 )
y= f(x)
x
x2
x1
x0
x
Bu eşitlik düzenlenirse daha önceden yazılmış olan Newton - Raphson eşitliği ile aynı
ifadedir.
x1 = x 0 x1 = x 0 -
f ( x0 )
f ' ( x0 )
f ( x0 )
f ' ( x0 )
g( x 0 )
Buradan da hatırlanacağı üzere g ' ( x0 ) 1 olmalıydı. Bu yüzden de
g ( x 0 ) ' ın türevini alalım. Yani :
f ( x0 )
f ' ' ( x 0 ). f ( x 0 )
)' =
f ' ( x0 )
f ' ( x 0 ) 2
Newton Raphson yakınsaklık koşulu elde edilir.
g' ( x 0 ) = ( x 0 -
1
den
ÖRNEK : f(x) = x 2 -4x-5 fonksiyonunun kökünün -1 olduğu bilinmektedir. Bu kökün elde
edilmesi için Newton - Raphson yöntemini kullanarak hesaplayınız.
ÇÖZÜM :
Öncelikle yakınsama kuralını incelemeliyiz :
f ' ' ( x 0 ). f ( x 0 )
f ' ( x 0 ) 2
1 olmalıydı.
f(x)= x 2 -4x-5
f ' (x) = 2x-4
f '' (x) = 2
x 0 = 0 başlangıç değeri aldığımızda üstteki formülde yerine yazılırsa 1 den
küçük çıktığı görünmektedir. Bu yüzden de x 0 = 0 a göre işlem yapmaya başlayabiliriz :
f ( x0 )
f ' ( x0 )
x1 = 0 - (-5/-4)
x1 = -1,25
x1 = x 0 -
f ( x1 )
f ' ( x1 )
x 2 = (-1,25) - (1,56/(-6,5))
x 2 = -1,01
x 2 = x1 -
f ( x2 )
f ' ( x2 )
x3 = (-1,01) - (0,0601/(-6,02))
x3 = -1,009
x3 x 2
f ( x3 )
f ' ( x3 )
x 4 = (-1,009) - (0,054081/(-6,018))
x 4 = -1,00001346 ˜ -1 yani kök bulunmuş olur.
x 4 = x3 -
MÜLLER YÖNTEMİ
Bir f(x) fonksiyonun gösterdiği eğri üzerindeki üç noktadan bir parabol geçer. Noktalardan
ikisi verildiğinde üçüncü noktayı ya kendimiz seçeriz ya da bu noktada verilebilir. Bu üç
noktadan geçen parabolün iki kökü vardır. Eğer üçüncü noktayı verilen iki noktanın orta
noktası olarak seçmişsek, bu parabolün köklerinden hangisi bu noktaya yakınsa o yaklaşık
kök olarak alınır veya verilen iki nokta ile birlikte üçüncü nokta olarak alınıp yeni parabol ve
bunun kökleri bulunmak suretiyle işleme devam edilir. Bu işlem istenen yakınsama
sağlanıncaya kadar sürer. Müller yöntemi polinomların köklerinin bulunması için kullanılan
popüler bir yöntemdir.
ÖRNEK:
f(x) = x3 – 3x2+ 5x – 4= 0 denkleminin Müller yöntemi ile x=1 ve x=2 arasındaki kökünü
bulunuz.
x=(1+2)/2=1.5
Verilen aralığın orta noktası x=1.5’dir. Üç nokta aşağıdaki gibi alınır:
(1,-1), (1.5,-0.125), (2,2)
Noktalardaki y değerleri fonksiyonda x’lerin yerine konulmasıyla elde ediliyor.
f(x)=y=1-3+5-4= -1
Bu üç noktayı bir ikinci derece parabole benzetirsek;
y =ax2 +bx+ c
Yukarıdaki üç noktayı bu parabole uygularsak aşağıdaki gibi üç bilinmeyenli üç denklem elde
ederiz.
a+b+c= -1
2.25a +1.5b+ c = 0.125
4a + 2b + c =2
a= -0.5
b=3.5
c=-4 bulunur.
Bu sistem çözüldüğünde parabol ;
y = -0.5x2 +3.5x -4 olur ve ikinci dereceden parabolün kökleri
x1=- 1.439 ve x2= -5.561 çıkar.
Yaklaşık olarak x1=1.5 gerçek köke çok yakın bir değerdir. Ancak x1=1 , x2= 1.5 ve x3=2
alınarak yukarıdaki işlemler tekrarladığında gerçek kökte bulunabilir.
BERNOULLİ YÖNTEMİ
Bu yöntem bir tek dominant kökünün mevcut olduğu bilinen
a0xn +a1xn-1 +…….+an =0
şeklindeki polinomal denklemin kökünü verir. Basit bir değişiklik ile aynı yöntem eşlenik
kompleks kök çiftlerinin bulunmasında da uygulanabilir.
n. mertebeden farklı denklemin hesabı için ;
a0xk + a1xk-1 +…….+anxk-n = 0
r1 = lim( xk+1/xk)
kullanılır. Eğer dominant kök r1 ise,
olarak belirlenir.
Genellikle başlangıç değerleri
x-n+1 =x-n+2 =……….=x-1 =0 , x0= 1 olarak alınır.
ÖRNEK:
x4 -4x3 +x2-2x +2 =0 denklemine Bernoulli yöntemini uygulayınız.
Birleştiriliş fark denklemi
xk -4xk-1 +xk-2 -2xk-3 +2xk-4 =0
Başlangıç değerleri x-3=x-2=x-1= 0 ve x0= 1 alınır. Sonra ard arda gelen x4 aşağıda verilir.
xk+1/x k oranı da verilmiştir. Bernoulli yöntemi çok yavaş olarak gerçek köke yakınsar. Bu
yöntem genellikle Newton-Raphson yöntemi için bir başlangıç yaklaşımı olarak kullanılır.
k
xk
xk+1/xk
1
4
4.75
2
19
4.15
3
79
.
.
.
.
.
.
-
.
.
Burada xk -4xk-1 +xk-2 -2xk-3 +2xk-4 =0 denkleminde k yerine sırasıyla 1,2,3…. Konularak
işlemler yapılır ve gerçek köke yakınsama sağlanır. Örnekte de görüldüğü gibi daha ikinci
iterasyonda 4.75’ten 4.15’e yakınsama olmuştur.
Yukarıdaki tablodaki işlemler şu şekilde yapılır:
k=1 için
x 1-4x0+x-1-2x-2 +2x-3=0
x-3=x-2=x-1= 0 ve x0= 1 alınır ve x 1 =5 bulunur.
k=2 için aynı işlem x 1 =5 yerine konularak yapılır ve sonuç bulunur.
GRAEFFE KÖK-KARE YÖNTEMİ
xn +a.xn-1 +……..+an =0 denklemini göz önüne alalım. Basitleştirmek amacıyla bütün
köklerin reel ve birbirinden farklı olduğunu varsayalım. Bütün çift üslü terimleri eşitliğin bir
tarafına, tek üslü terimleri de diğer tarafa alalım. Sonra her iki tarafın karesini hesaplayalım.
(xn +a2 xn-2 +a4 xn-4+…)2 = (a1 xn-1+a3 xn-3+a5 xn-5+….)2
Bu işlemin sonunda x2 = y koyarsak ;
yn +b1yn-1 +b2yn-2 +….+bn= 0
şeklinde yeni bir denklem buluruz.
Burada;
b1= - a12 + 2a2
b2 = a22 – 2a1a3 +2a4
b3 = - a32 +2a2a4 -2a1a5 +2a6
…….
…….
…….
bn =(-1)n an2
veya,
(-1)k bk =ak 2 -2ak-1ak+1 +2ak-2 ak+2….. kullanılır.
Bu şekildeki işlemler ardışık olarak tekrarlanır ve m kez kare alındıktan sonra , kökleri
q1,q2,…..,,q n olan bir An+An-1x+…..+A1xn-1+xn =0 denklemi bulunsun. Asıl denklemin
kökleri p1,p2,…..,pn olsun. O zaman;
q1 = pi2m , i = 1,2,…,n
olur. Ayrıca
│p1│ >│p2 │>….>│p n│
│q1│>>│q2│>>q3>>……>>qn*
varsayılırsa,
olur. Böylece,
A1 = -Ʃqk= -q
A2= Ʃqiq=q1q2
A3= - Ʃ q i q k q l =-q1q2q3
ve sırasıyla,
q1= - A1
q2= -A2/A1
q3 = -A3/A2
Sonuçta q i ’lerin 2m’ci kuvvetten kökü ile p i ’ler bulunur. Köklerin işaretleri denklemde
yerine konularak saptanır.
ÖRNEK:
x3 – 2x2 - x +3 =0 denkleminin yaklaşık köklerinin bulunması.
Tek üsler ve çiftler üsler farklı tarafta toplanıp kareleri alınır.
(x3 - x)2 = (2x2 -3)2
x6 - 2x4 +x2 = 4 x4 - 12x2 +9
x2 =y alıp yeniden düzenlersek;
y3+2y2 -11y -9 =0
(y3 -11y)2 = (-2y2 +9)2
y2 =z yazarsak;
z3 -26z2 - 139z -81=0
(z3-139z)2 =(26z2+81)2
Bir kez daha tanıma göre düzenleyip z2 = u aldığımızda;
u3 +954u2 - 15109u – 6561 =0
Böylece;
olduğundan,
m=3 , 2m =8
│p1│= (- 954)⅛ = 2.3574
│p2│= (15109/954) ⅛ =1.4123
│p3│ = - (6561/15109) ⅛ = -0.9009
Bu denklemin gerçek kökleri ;
x1 = 2, x2 = 1.5, x3 = - 1 bulunmuş olur.
NEWTON YÖNTEMİ
Lineer olmayan denklem sistemlerinin Newton Raphson yöntemiyle sayısal çözümlerinin
bulunması problemine geçmeden önce
f 1 (x 1 ,x 2 )=0
f 2 (x 1 ,x 2 )=0
iki değişkenli lineer olmayan denklem sistemini göz önüne alalım.yaklaşık çözümün
(x 1 ,x 2 ) olduğu varsayılsın.daha iyi çözümde (x 1 +h 1 ,x 2 +h 2 ) ‘de olsun .
f 1 ve f 2 fonksiyonlarını (x 1 +h 1 ,x 2 +h 2 )civarında Taylor serisine açalım;
f 1
x
1
f 2
x1
f 1
x
j= 1
f 2
x1
f 1
x 2
f 2
x 2
h1
f1
h = - f
2
2
f 1
x 2
jakobien matris
f 2
x 2
x1 k 1 x1 k
1
k 2 = k - j
x2 x2
f1
f
2
Newton yönteminde yakınsama koşullarını çok iyi olmasına ragmen başlangıç degerleri iyi
seçilmezse sonuç alınamaz.Newton yönteminin algoritması basittir .Yöntem teorik olarak
kusursuzdur. Pek çok problem için gerçek çözüme yakınsar.
ÖRNEK:
Aşagıda verilen denklem sisteminin yaklaşık çözümünü Newton yöntemiyle bulunuz.
Başlangıç degerini x 0 =(0.1 , 0.1 , 0.19) t olarak alınız.
1
3 x 1 -cos(x 2 x 3 )- =0
2
2
x 1 -81( x 2 +0.1) 2 +sin x 3 +1.06=0
e x1x2 +20 x 3 +
10 3
=0
3
ÇÖZÜM:
Verilen denklem sistemi için jacobien matrisi;
3
x3 sin x2 x3
x2 sin x 2 x3
J( x1 , x 2 , x3 )= 2 x1
162( x2 0.1)
cos x3
x2 e x1x2
x1e x1x2
20
şeklindedir.Newton algoritmasına göre istenen iterasyon :
x1 k x1 k 1
k k 1
x2 = x2 +
x k x k 1
3 3
y1 k 1
k 1
y2
y k 1
3
Olur.Burada
y1 k 1
k 1
k 1
k 1
k 1
k 1
k 1
1
k 1
y 2 =-(j(x 1 ,x 2 ,x 3 )) F(x 1 ,x 2 ,x 3 )
y k 1
3
Şeklindedir.Böylece verilen sistem için k. İterasyon
j(x k 1 )y k 1 =-F(x k 1 )
şeklinde yazılabilir.Burada
j(x
k 1
=
)
3
k 1
2 x1
x k 1e x1k 1x2 k 1
2
x3
k 1
sin x 2
162( x 2
k 1
k 1
x3
k 1
0.1)
k 1 x1k 1 x2 k 1
x1 e
x 2 sin x 2 x3
k 1
cos x3
20
y1 k 1
k 1
y k 1 = y 2
y k 1
3
1
k 1
k 1
k 1
3 x1 cos( x 2 x3 )
2
k
1
k
1
k
1
F(x k 1 )= ( x1 ) 2 81( x 2 0.1) 2 sin x3 1.6
k 1
10 3
k 1
k 1
e x1 x 2 20 x3
3
Sistemleri çözülür ve elde edilen değerler aşağıdadır.
K
x 1k
x 2k
x3
k
x k x k 1
0
0.10000000
0.1000000
-0.10000000
1
0.50003702
0.01946686
-0.52152047
0.422
2
0.50004593
0.00158859
-0.52355711
1.79*10 2
3
0.50000034
0.00001244
-0.52359845
-
1.58*10 3
Tablodan görüldüğü gibi Newton yöntemi verilen denklem sisteminin çözümüne hızlı bir
şekilde yakınsar.
STEEPEST DESCENT YÖNTEMİ
Bu yöntem lineer olmayan denklem sistemlerinin sayısal çözümleri için sıks sık kullanılan bir
minimizasyon yöntemidir.yçntemin uygulanabilmesi için ;
f 1 (x 1 ,x 2 ,…x n )=0
f 2 (x 1 ,x 2 ,….x n )=0
f n (x 1 ,x 2 ,….x n )=0
şeklinde verilen denklem sistemi
S(x 1 ,x 2 ,…x n ) = f 1 f 2 .... f n
2
2
2
Şeklinde bir S fonksiyonuna dönüştürülür.Bu bir ikinci derece fonksiyondur. x 1 ,x 2 ,…x n
değerleri S ile tanımlanmış fonksiyonu minimum yaparlar.Bunun terside doğrudur.
Bir F fonksiyonunun F ile gösterilen gradyenti;
F
x1
F
gibi tanımlanır ve F fonksiyonunun en büyük değişme hızının
F =
x
2
F
x
n
doğrultusunda bir vektördür.
Problem S ‘nin değişme hızının en küçük olduğubir yeri bulmaktır .Bu nedenle gradyent
doğrultusuna ters yöndekibir doğrultu üzerinde hareket edilir. x 0 vektörü ile tanımlanmış p 0
noktasından başlanarak P 0 noktasında ,
Vd V ( x 0 ) S ( x 0 )
Gibi bir
V 0 vektörü boyunca devam edilir.
V 0 vektörünün L 0 uzunluğu,
L0= V
S
S
= ( ) 2 ......( ) 2
xn
x1
İle hesaplanır ve buradan bir U birim vektörü,
V (x0 )
U(x 0 )=
L0
Olarak tanımlanır.P 1 noktasıda yine V vektörü üzerinde alınsın. Bunun U (x 0 ) birim
vektör ve t uzunluk parametresi cinsinden yeri;
tU (x 0 )
P 1 noktasını belirleyecek şekilde tanımlanır.
P0
P1
noktaları arasındaki vektör aşağıdaki gibi tanımlanır.
x11 x1 0
1
0
x2 x2
.
1 . 1
x n x n
Eşitlikler saglanıpvektör notasyonunda yazıldığında,
t
X 1 X 0 ( ).S ( x 0 )
L0
Veya;
X k 1 = X k - (
t
).S ( x 0 )
L0
Burada t parametsesi 1 olarak alınabilir .Eger P min dogrultuda degılse ozaman,t=
işlem tekrarlanır.
ÖRNEK:
Aşağıda verilen
f 1 =x 1 2 +x 2 2 = 0
f 2 =x 1 2 -x 2 2 =0
0
sistemini x 1 0 =1.2 ve x 2 =0.7 olarak çözünüz?
Çözüm;
2
S= f 1 2 + f 2 =2 x 1 4 +2 x 2
L0 1.9102
4
t
).S ( x 0 )
L0
t
X 1 X 0 ( ).S ( x 0 )
L0
X k 1 = X k - (
1.2
1 13.824 0.6765
X1 =
=
0.7 1.9102 2.744 0.7364
t
alınarak
2
….. ıterasyon saglanana kadar devam edilir.
EŞLENİK GRADYENT YÖNTEMİ
Lineer olmayan denklem sistemlerinin çözümü için kullanılan minimizasyon yöntemlerinden
biride eşlenik gradyent yöntemidir.
Çok az farkla steepest descent yöntemi ile aynıdır.
Burada S fonksiyonu yerine H ile gösterilen Hessian matrisi vardır.
F( x1 , x2 ,...xn ) fonksiyonunun hessian matrisi
2F
2
x1
H= .
2F
x x
n 1
2F
x1 x n
.
.
2
F
.
x n x n
.
Şeklinde bulunur.
WEGSTAIN YÖNTEMİ
Bu yöntem x=g(x) şekline getirilebilen denklemlere uygulanan ardışık tekrar işlemleri
ıraksadığında , işlemi yakınsama haline dönüştürmek için kullanılır. Bilindiği gibi x=g(x)
şeklindeki bir iterasyon ӏg’(x)ӏ<1 ise yakınsar. Bunun dışında genellikle ıraksar. X=g(x)
şekline getirilebilen tek değişkenli bir fonksiyon için wegstaın yönteminin geliştirilmesinde
-1<g’(x)<0 olduğu varsayılır. O zaman ,
Olsun. Burada q= a÷(a-1) ve a=g(xn)- g(xn-1)/ xn-xn-1
Şeklinde alınmıştır. Bu bütün düzgün eğriler için geçerlidir. Q’nun önemi olmadığı hallerde,
xˉn+1 = (xn+1.xn-1 – xn.xn)/(xn+xn-1-xn-xn)
Kullanılabilir. Wegstain yönteminde yakınsama Newton Raphson yöntemindeki yakınsamaya
göre 1.618 mertebesindedir. Yöntemin kullanılış biçimi aşağıdaki gibidir.
10 , x=g(x) şekline getirme işlemini yap ve
X1= g(x0), x2=g(x2)’i bul. Sonra x2’yi bulmak için
a=(g(x1)-g(x0))/(x1-x0) = (x2-x1)/(x1-x0) ,
q.a/(a-1) ‘i hesapla ve
x2¯=qx1+(1-q)x2 ‘ yi kullan.
20 , x3=g(x2ˉ) kullanarak x3 ü bul ve
a=(g(x2ˉ)-g(x1))/(x2ˉ-x1) , q.a/(a-1)
x3ˉ=q.x2ˉ+(1-q).x3
30, x4=g(x3ˉ) , a=(x4-x3)/(x3-x2) , g=a/(a-1)
X4ˉ=q.x3ˉ+(1-q)x4 şeklinde işleme devam et
Xˉn+1’yi bulurken, n>=3 olması halinde
a=(xn+1+xn)/(xn’-xn-1’)
ve
xˉn+1=q.xˉn+(1-q)xn+1 olur.
ÖRNEK: f(x) = x2-4=0 denklemini g’(x)>=1 olması halinde yaklaşık olarak çözelim.
X=x+x2-4 ve x0=6 kullanalım. X1, 6+36-4=38
Xˉ2=1478 , a=(1478-38)/(38-6)= 45,
Q=45/44= 1.0227273
xˉ2= (45/44)(38)+(1-(45/44)(1478)= 5.272688s
xˉ2 = (g(xˉ2)- g(x))/(xˉ2-x1)=44.312
q=a/(a-1)= 1.0231
xˉ3=4.7226580
x4= 23.026157
x5=7.251968
x6=3.6954468
x7=2.2756761
x8=2.0198933
x9=2.0002670
x10=2.000005
bulunur. Görüldüğü gibi yakınsama yavaştır. Ancak iterasyon işlemi köke yakınsar.
MATRİS YÖNTEMİ
F(X)= xn + a1xn-1 + … +an-2x2 + an-1x + an
Şeklinde verilen bir polinomun ilişki matrisi (companion matrix)
Şeklinde yazılır, bu matrisin öz değerleri verilen polinomun kökleridir.
Lineer olmayan denklem sistemlerinin çözülmesi
Lineer olmayan bir denklemin kökünü ya da köklerini bulmak için kullanılan sayısal
yöntemler bazı değişiklikler ile lineer olmayan denklem sistyemleri için kullanılır.
Leneer olmayan denklem sistemi ;
Şeklinde, n bilinmeyene bağlı n tane fonksiyondan oluşur.
Lineer olmayan denklem sistemlerinin çözümü için basit iterasyon yöntemi
Lineer olmayan bir denklem sistemi yukarıdaki fonksiyonlar gibi verilmiş olsun.
Şeklinde yazalım. Bu denklem, vektör notasyonu ile,
X=G(x)
Gibi yazılır.
Lineer olmayan denklem sistemleri için yakınsama koşulları tek bir lineer denklemin kökünün
bulunmasında olduğu gibi belirlenir. Bu koşulları aşağıdaki şekilde genelleştirebiliriz:
ÖRNEK : Aşağıdaki denklem sistemini x10=3.4 , x20 =2.2 civarındaki kökleri
basit iterasyon yöntemi ile araştırınız.
F1= x1+3logx1-x22=0
F2=2x12-x1x2-5x1+1=0
x1= x22-3logx1
x2=2x1+(1/x1)-5
bu form kullanıldığında iterasyon köklere yakınsaması,
x11=3.25
x21=1.81
x12=1.74
x22=0.195
şeklinde devam eder.
x1=3.48 ve x2=2.26 gerçek çözüm olduğuna göre yukarıdaki çözüm görüldüğü
gibi açık ıraksar.