BiR FAZLI MOTORLAR
Çok geniş kullanma sahası olan küçük motorlar bir fazlı olarak
yapılırlar. Bir fazlı motorlar genellikle bir beygir ve daha küçük güçte
olurlar. Evlerde kullanılan elektrikli cihazların motorları bir fazlıdır.
Birçok iş yerlerinde, çiftliklerde, bürolarda çok değişik tipte ve güçte bir
fazlı motorlar kullanılırlar.
Bir fazlı motor çeşitleri şunlardır:
1) Üniversal motor (Seri Motor)
2) Yardımcı Sargılı Motor
3) Yardımcı Kutuplu (gölge kutuplu) Motor
4) Relüktans Motor
5) Repülsiyon Motor
6) Küçük Senkron Motor
Bir fazlı motorları sıra ile incelerken, motorun yapısı, çalışması,
özellikleri ve kullanıldığı yerler anlatılacaktır.
1) ÜNÎVERSAL MOTOR (SERÎ MOTOR)
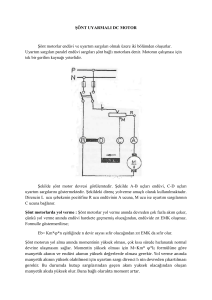
a) Yapısı : Üniversal motor doğru akım seri motoruna benzer. Statoru
saç paketlerinden çıkıntılı kutuplu olarak yapılmış, kutuplara kutup
bobinleri yerleştirilmiştir. Rotor doğru akım makinası endüvisi gibidir,
saç parçalarından yapılmıştır. Rotor oluklarına yerleştirilen sargılar D.A
endüvi sargılarının aynıdır. Şekil 11.1 de sökülmüş bir Üniversal motorun parçaları ve şekil 11.2 de Üniversal motorun stator ve rotor saçları,
paketlenmiş statora kutup bobinlerinin yerleştirilişi görülüyor. Şekil 11.2
Xc) de değişik tipte bir seri motor görülüyor.
Şekil 11.1 üniversal motorun parçalan.
(a) Stator ve rotor sacı
(b) Statora kutup bobinlerinin yerleştirilişi
(c) Seri motor
Sekil 11.2 üniversal motorun stator ve rotor saçları, stator saç paketine
kutup bobinlerinin yerleştirilişi, deği sik yapıda bir seri motor.
b) Çalışma Prensibi :
Üniversal motora bir fazlı alternatif emk uyguladığımızda statordaki
kutup bobinlerinden ve endüvi sargılarından alternatif akım geçer,
Kutup bobinlerinden geçen akım manyetik alan meydana getirir. Kutupların meydana getirdiği manyetik alanın içinde bulunan endüvi sargılarından akım geçince, "Manyetik alanın içinde bulunan bir iletkenden akım geçtiğinde, iletken manyetik alanın dışına doğru itilir." prensibine göre endüvi oluklarmdaki iletkenler itilir. Endüvi dönmeye başlar.
(a) Pozitif yarım peryotta endüvi ve enduktörden geçen akıma göre cnduvinin dönüşü.
(b) Negatif yarım peryotta geçen akıma göre pndüvinin dönüşü,
Şekil 11.3 Motorun alternatif akımda çalışması.
Alternatif akımın pozitif yarım peryodunda kutup bobinlerinden ve
endüviden bir yönde akım geçer. Negatif yarım peryotta ise, kutup bo
binlerinden ve endüviden ters yönde akım geçer. Şekil 11.3 de alterna
tif akımın pozitif ve negatif yarım peryotlarmda motordan geçen akım
lann yönlerine göre motorun dönüş yönü görülüyor. Endüv ide î
kutbunun altındaki iletkenlerden geçen akım bir yönde, 3 kutbunun a]
tındaki iletkenlerden geçen akım ters yöndedir. N kutbunun altındaV
iletkenler bir yöne itilirken, S kutbunun altındaki iletkenlerde ters ye
ne itilirler. Endüvinin iki tarafındaki bu kuvvet çiftinin meydana getirdiği döndürme momenti endüviyi döndürür. Alternatif akımın nega tif yarım peryodunda ise, kutuplardan geçen akımın yönü değiştiği için
kutuplar değişir. Aynı anda endüviden geçen akımın da yönü değiştiği
için N kutbunun altındaki endüvi iletkenlerindeki akım yönü gene aynı,
S kutbunun altındaki endüvi iletkenlerindeki akımların yönleri de aynıdır. Manyetik alan tarafından endüvi iletkenlerinin itilme yönü değişmediği için endüvi aynı yönde dönmeye devam eder. Kollektör dilimleri
ve fırçalar yardımı ile dönen endüviden, geçen akımlar, N kutbunun altındaki iletkenlerde bir yönde, S kutbunun altındaki endüvi iletkenle rinde de ters yönde olması sağlandığı için endüvi bir yöne doğru döner.
Endüvide meydana gelen döndürme momenti, endüviden geçen akıma ve kutupların manyetik akısına bağlıdır. Endüvi ve endüktör (kutup) sargıları seri bağlı olduğu için manyetik akının ve endüvi akımı nın artışı aynı anda olur. Bu yüzden üniversal motorların kalkınma ve
döndürme momentleri yüksektir.
c) Özellikleri :
Üniversal motorların devirleri D.A seri motorlarında olduğu gibi
yükle değişir. Boştaki devir sayılan çok yüksektir. Devirleri 15000 20000 d/d kadar çıkar. Boşta devir sayısını sınırlayan sürtünme ve rüzgâr (vantilasyon) yüküdür. Küçük güçlü motorların endüvi çaplarının
3 - 5 cm gibi küçük olması yüksek devir sayısının santrifüj etkisini azaltır.
Üniversal motor D.A. la çalıştığında 'devir sayısı - yük' karekteristik eğrisi, A.A. da çalıştığındaki 'devir sayısı-yük* karekteristik eğrisinden biraz düşük olur. Bazı motorlarda A.A ve D.A 'Devir-yük' eğrileri birbirini keser. Y/ikle devir sayısının değişmesi D.A. da, a) motor
yüklendikçe endüvi ve endüktör dirençlerinde düşen gerilimlerin art ması devir sayısını azaltır, b) motor yüklendikçe endüviden geçen yük
akımının sebep olduğu endüvi reaksiyonu hava arahğındaki manyetik
akıyı azaltır. Bu da devir sayısının yükselmesine sebep olur.
Seri motorlarda (üniversal motorlarda) devir sayısını veren for-
R» : Endüvi direnci,
R : seri endüktör direnti.
U : Motora* uygulanan gerilim.
î : motordan geçen akım,
mülü, doğru akım makinaları dersinden hatırlayarak yazalım.
k
: katsayı,
0 : manyetik akı.
n
: motorun devir sayısı.
Üniversal (seri) motor alternatif akım ile çalışırken motor yüklendikçe, yukarıda açıklanan iki etkiden başka üçüncü bir etkide devir sayısını değiştirir. Endüvi ve endüktör sargılarının R a ve R, omik dirençlerinden başka, alternatif akımda bu sargıların reaktif dirençlerinin etkileri görülür. Endüvi ve endüktörün reaktif dirençlerinin sebep olduğu
reaktif gerilim düşümleri endüviye uygulanan gerilimi düşürür. Böylece, alternatif akımla çalışan seri motor yüklendikçe devir sayısı, doğru
akımla çalışırkenki devir sayısmdanda daha düşük olur.
Yük altında çalışan bir Üniversal motorun devir sayısı, motora uygulanan gerilimi değiştirerek ayarlanır. Bir Üniversal motorun yalnız
endüvisinin uçlarını veya yalnız endüktörünün uçlarını değiştirerek, de vir yönü değiştirilir. Üniversal motorun devir yönünün değiştirili şi şekil 11.4 de görülüyor.
Üniversal motorlar 1/500 Hp ile 2/3 Hp arasında çok değişik güçte
yapılırlar.
<a) Normal bağlantı,
(b) Endüvinin uçlan
değiştirilir.
(c) Endüktör uçlan
değiştirilir.
Sekil 11.4 Üniversal motorun devir yönünün değiştirilmesi.
d) Kullanıldığı Yerler ı
Üniversal motorlar çok çeşitli yerlerde kullanılırlar. Yüksek devirleri sebebi ile elektrik süpürgelerinde tercih edilirler. Evlerde kullanı -
lan kahve değirmenlerinde, mikzer (karıştırıcı) lerde, vantilatörlerde
üniversal motorlar kullanılırlar.
Üniversal motorların yüksek devirleri dişli tertibatı (dişli kutusu)
ile düşürülerek kullanılmalarına örnek, elektrikli breyizler (matkaplar)
dır.
Dikiş makinalarmda, saç kurutma makinalarında, elektrikli traş makinalarında, sirenlerde, seyyar taşlama ve zımpara makinalarında üniversal motorlar kullanılırlar.
2. YARDIMCI SARGILI MOTORLAR
Bir fazlı endüksiyon motorları içinde en büyük güçte yapılan ve en
fazla kullanılan yardımcı sargılı asenkron motorlardır.
a)
YAPISI:
Yardımcı sargılı motorun statoru üç fazlı asenkron motorun statoru gibidir. Stator oluklarına 90° faz farklı olarak ana.sargı ve yardımcı
sargı yerleştirilmiştir. Ana sargı kalın telden fazla sarımlı olarak sarılmış ve stator oluklarının 2/3 ünü kaplar. Stator oluklarının geri kalan
1/3 ünü de daha ince telden az sarımlı olarak sarılmış olan yardımcı
sargı yerleştirilmiştir.
(a) Motorun iç görünüşü.
(b) Motorun bağlantı soması. Sekil 11.5
Yardımcı sargılı asenkron motor.
Ana sargı ile yardımcı sargı paralel bağlanır ve bir fazlı A.A uy.gulanır. Yardımcı sargının devresine seri olarak bir santrifüj anahtar
bağlanmıştır. Motor çalıştıktan sonra, devir sayısı belirli bir değere ulaştığında, santrifüj anahtar açılarak yardımcı sargıyı devreden çıkarır. Motor yalnız ana sargı ile çalışmasına devam eder.
Yardımcı sargılı motorun rotoru üç fazlı asenkron motorlarda olduğu gibi, kısa devre rotorlu (sincap kafesli rotor) dur. Şekil 11.5 de
yardım'cı sargılı motorun şeması ve motor görülüyor.
b)
ÇALIŞMA
PRENSİBİ:
Şekil 11.6 da görüMüğü gibi, stator oluklarına 90° faz farklı
olarak iki faz bobini yerleştirdiğimizde iki kutuplu iki fazlı en basit sargı elde edilmiş olur. (U — X) birinci faz sargısının, (W — Z) ikinci faz
sargısının uçları olsun. Şekil 11.6 (a) da iki fazlı sinüsoidal emk'lerin
değişim eğrileri görülüyor. Stator sargılarına iki fazlı alternatif akımı
uyguladığımızda, birinci faz sargısından A fazının akımı, ikinci faz sargısından da B fazının akımı (A dan 90° geride) geçecektir. Statorun iki
faz sargısından geçen 90° faz farklı A ve B faz akımlarının meydana
getirecekle?! manyetik alanların yönlerini, muhtelif anlardaki (çeşitli
anlardaki) A ve B faz akımlarının yönlerine göre bulalım.
Şekil 11.6 (a) da görüldüğü gibi, (1) anında A fazı pozitif, B fazı
ise negatiftir. (1) nolu şekilde, birinci faz bobininin U ucundan A fazı nın akımı giriyor X den de çıkıyor, ikinci faz bobininin W ucundan B
fazının akımı çıkıyor, Z ucundan giriyor. Faz bobinlerinden bu anda geçen akımların yönlerine göre, bobinlerin meydana getirdiği manyetik
alanın yönleri ve statordaki kutuplar şekilde görülüyor.
(a) iki fazlı alternatif akımın değişim eğrileri
(b) 1-2-3-4) iki faz bobininin meydana getirdiği manyetik alanlar.
Şekfl 11.6 iki fazlı asenkron motor ve döner alanın meydana gelişi.
2, 3, 4 anlarında stator sargılarından geçen akımların yönlerini işaretliyerek, bu anlarda statorda meydana gelen kutupların yerleri 2, 3,
4 nolu şekillerde gösterilmiştir. 4 anından sonra tekrar 3 anı gelir. Şu
halde, statorun iki faz bobininden geçen iki fazlı alternatif akımın bir
peryotluk değişmesinde (l, 2, 3, 4 anlarında) statorda meydana gelen
(N S) kutuplarının bir devir yaptığı Şekil 11.6 (b) de görülüyor.
iki fazlı stator sargılarından geçen iki fazlı alternatif akımlar düzgün bir döner alan meydana getirirler. Bu üç fazlı alternatif akımın üç
fazlı stator sargılarından geçince meydana getirdiği döner alana benzer.
Statorun ortasındaki sincap kafesli (kısa devreli) rotor döner ala nır etkisi ile dönmeye başlar. Döner alan rotorun kısa devre çubuklarını keserek çubuklarda emk'ler endükler. Kısa devre çubuklardan endüklem akımları geçer ve rotorda manyetik alan meydana gelir. Ro tor
kutupları, döner alanın kutuplan tarafından çekilir ve rotor döner alanın
yönünde dönmeye başlar. (Döner alanın kısa devreli rotoru döndürmesi üç
fazlı asenkron motorları incelerken detaylı olarak açıklanmıştır.)
Şu halde, yardımcı sargılı motorların kısa devreli rotorlarının dö-
nebilmesi iğin, stator sargılarından gecen akımların düzgün bir döner
alan meydana getirmesi gerekir.
Şekil 11.7 de yardımcı sargılı asenkron motorun bağlanışı görülüyor. Ana sargıdan geçen l a ve yardımcı sargıdan geçen 1> akımları arasında 90° ye yakın faz farkı meydana getirebilirsek, ana ve yardımcı
sargıdan geçen bu akımlar döner alan meydana getirebilir.
Şekil 11.7 Yardımcı sargılı motorun bağlantı şeması.
Ana sargı ile yardımcı sargıdan geçen akımlar arasında 90° ye ya kın faz farkı meydana getirebilmek için şunlar yapılır:
1) Ana sargının sarım sayısı fazla ve tel çapı kalın seçilir. Bu arada
yardımcı sargıda ince telden az sarımlı olarak sarılır. Ana sargının
R* etkin direnci küçük, Xa reaktif direnci de büyük olacağından, ana
sargıdan geçen akım (î a) gerilimden 90° ye yakın geri kalır (meselâ
80°).
Yardımcı sargının R y etkin direnci büyük, Xv reaktif direnci de küçük olacağından, yardım'cı sargıdan geçen akımın (t v) gerilimden geri
kalma açısı küçük olur (meselâ 30°). Şekil 11.8 de U gerilimi ve akımlar
vektör diyagramı görülüyor. Ana sargı ile yardımcı sargıdan geçen
akımlar arasındaki (6°) açı, 90° ye ne kadar yaklaşırsa döner alan o kadar düzgün olur.
Sekil 11.8 Vektör diyagramı.
Ana ve yardımcı sargılardan geçen faz farklı akımların meydana
getireceği döner alan kısa devreli rotorun dönmesine sebep olur.
2) Yardımcı sargıya, şekil 11.9 (a) da görüldüğü gibi, bir kondansatör seri olarak bağlanırsa, yardımcı sargıdan geçen akım kondansatörün etkisi ile gerilimden ilerde olur. Şekil 11.9 '(b) deki vektör diyagramında görüldüğü gibi, ana ^sargının akımı ile yardımcı sargının akımı
arasında 90° lik faz farkı meydana gelir. Statora 90° faz farklı olarak
yerleştirilmiş olan ana ve yardımcı sargılardan geçen 90° faz farklı î a ve
İy akımları düzgün bir döner alanın, şekil 11.6 da olduğu gibi, meydana
gelmesine sebep olur. Statorun ortasındaki kısa devreli rotor da döner
alanın etkisi ile aynı yönde dönmeye başlar.
ı
(a) Kondansatörlü yardımcı sargılı
(b) Vektör diyagramı,
motor.
Şekil 11.9 Yardımcı sargılı motor ve vektör diyagramı
Motorun Yalnız Ana Sargı ile Çalışması :
Şekil 11.10 da görüldüğü gibi, yalnız ana sargısı olan bir motora bir
fazlı emk uygulandığında ana sargıdan geçen akım düzgün bir döner alan
meydana getirmez. Manyetik alanın değişmesi bir hat üzerinde olur. Pozitif yarım peryotta N ve S kutupları meydana gelir, kutupların alan
şiddeti artarak maksimum, sonra azalarak sıfır olur. Negatif yarım peryotta kutuplar değişir (S N) kutupları meydana gelir. Bu kutupların da
.şiddeti artarak maksimum ve sonra azalarak sıfır olur.
<a) Ana sargılı motor.
(b) Ana sargının meydana getirdiği
manyetik alan.
(c) Ana sargıdan geçen bir fazlı alternatif
akımın meydana getirdiği döner alanlar
Şekil 11.10 Bir fazlı asenkron motorun ana sargı ile çalışması.
Burada manyetik alan bir hat (doğru) üzerinde çoğalır, azalır ve
yön değiştirir. Bu alanın etkisindeki kısa devreli rotor dönmez.
Kısa devreli rotoru saat ibresi yönünde elle hızla çevirirsek, roto run dönmeye başladığını görürüz. Rotorun muindeki kasnağa bir yük v
versek, motorun yükü taşıdığını görürüz. Akımı kesip motoru durdura-
lım. Tekrar şalteri kapatarak ana sargıya bir fazlı şebeke gerilimini uygulayalım. Motoru elle saat ibresinin ters yönünde hızla döndürdüğümüzde, rotorun hızlanarak normal devrine yükseldiğini ve dönmesine devam ettiğini ve mil'e binen yükü taşıdığını görürüz.
Şu halde, yalnız ana sargısı olan bir fazlı asenkron motoru elle ve ya mekanik bir tertibatla herhangi bir yöne döndürdüğümüzde, motor
çalışmaya başlar.
Yalnız ana sargı ile motorun çalışmasını şu şekilde açıklayabiliriz:
Ana sargıdan geçen alternatif akımın meydana getirdiği manyetik
alanın bir çizgi üzerinde değişimini, birbirine zıt yönde C<o) omega açısal hızı ile dönen iki eşit vektörün meydana getirdiği bileşke alan olarak
kabul edebiliriz. Şekil 11.10 c de görüldüğü gibi, Fl ve F2 eşit şid-detdeki
alan vektörleri (o>) açısal hızı ile zıt yönde döndüklerinde, meydana
getirdikleri bileşke manyetik akı yatay eksen (x ekseni) doğrultusunda
değişen bir manyetik alan olur.
Şekil 11.10 c de F! ve F2 eşit manyetik alanların (o>) açısal hızı ile zıt
yönde döndüklerinde meydana getirdikleri bileşke manyetik akı x ekse*
ni doğrultusunda değişir.
Kısa devreli rotoru saat ibresi yönünde döndürdüğümüzde, saat ibresi yönünde dönen Fl manyetik alanına uyarak dönmesine devam eder.
Rotoru saat ibresine ters yönde elle döndürdüğümüzde, saat ibresine zıt
yönde dönen F2 manyetik alanının etkisi ile rotor dönmesine devam eder.
Rotor dönmediği zaman, saat ibresi yönünde dönen .F x ve saat ibresine zıt yönde dönen F0 döner alanlarının etkisinde kalır. Döner alanlardan birinin rotor üzerinde meydana getirdiği döndürme momentini,
diğer alanın ters yönde meydana getirdiği döndürme momenti yok eder.
Dolayısıyla rotor da dönmez.
Yardımcı sargılı asenkron (endüksiyon) motoruna bir fazlı A. A. uygulandığında, meydana gelen döner alanın etkisi ile rotor belirli bir kayma ile döner alanın yönünde dönmeye başlar. Yardımcı sargı bu sırada
devreden çıkarılsa, motor dönmesine devam eder. Şu halde, yardımcı
sargının ödevi rotora ilk hareketi vermektir. Rotor miline konan santrifüj
anahtar yardımı ile rotor belirli bir devir sayısına ulaştığında yardımcı
sargı devreden çıkarılır. Motor yalnız ana sargı ile çalışmasına devam eder,
ve üzerindeki yükü taşır. Böylece, yardım'cı sargı devrede kaldığında bu
sargıda meydana gelecek olan ısı kayıplarından, sargıyı dev-, reden
çıkarmakla kurtulmuş oluruz.
Yardımcı sargı çok kısa bir zaman devrede kalacak şekilde yapılmıştır. Herhangi bir sebeple santrifüj (merkezkaç) anahtarın arızalanması ile yardımcı sargı devrede kalacak olursa, kısa bir zamanda yanar.
Yanan yardımcı sargının meydana getireceği ısı, ana sargının da kavrulmasına veya yanmasına sebep olur.
Motor ilk hareketinden sonra devir sayısı normal devrinin % 75 ine
ulaştığında, ana sargının tek başına meydana getireceği döndürme momenti, yardımcı sargı ile birlikte meydana getirecekleri döndürme momentinden büyük olur. Bu sebepten motorun devri, normal devrinin % 75
ine ulaştığında, santrifüj anahtar veya elektromanyetik bir röle ile yardımcı sargı devreden çıkarılır. Şekil 11.11 Rotor muindeki santrifüj
anahtar ve klemens tablosundaki kontak görülüyor.
(a) Klemens tablosu
(b) Rotor milindekl santrifüj anahtar
Yardıma Sargılı Motorlann Stator Sargılan :
Stator oluklarına yerleştirilen ana sargı ve yardımcı sargı bobinleri,
§ekil 11.12 de görüldüğü gibi, EL SARGI (sipiral sargı) şeklinde sarılır.
Motor iki kutuplu ise, ana sargı ve yardımcı sargı ikişer bobinden meydana gelir. Motor 4 kutuplu ise, ana sargıda 4 bobin, yardım'cı sargıda
da 4 bobin vardır.
24 oluklu (ankoşlu), 4 kutuplu yardımcı sargılı motorun sarım şemasını nasıl çizeceğimizi araştıralım.
1) Ana sargı 2/3 oluğu kaplıyacağına göre, 24 oluğun üçte ikisi 16
oluk eder. Ana sargı 16 oluğa, geri kalan 8 oluğa da yardımcı sargı yerleşecek demektir.
!2) Motor 4 kutuplu sarilacağına göre, ana ve yardımcı sargılar dörder bobin gurubundan meydana gelecektir. Ana sargı 4 tane bobin gurubundan meydana geleceğine göre, bir bobin gurubuna düşen oluk sayısı 16/4 = 4 dür. Bir bobin gurubu 4 oluğa yerleştirileceğine göre, bir
bobin gurubu iç içe iki bobinden meydana gelecektir.
Sekil 11.12 Spiral bobin.
Yardımcı sargıya ait olan 8 oluk, ana sargının 4 bobin gurubunun tam ortasında ikişer oluk boş olarak bırakılır. Şekil 11.13 de 4 kutuplu
24 oluklu motorun sarım şeması görülüyor.
örnek l: 24 oluklu, 2 kutuplu bir fazlı asenkron motorun sarım şe; masını çizelim.
c) YARDIMCI SARGILI MOTORLARIN ÖZELLiKLERi
Yardım'cı sargılı motorların, kondansatörsüz, startta kondansatörlü,.
devamlı çalışmada ve yol vermede kondansatörlü, çift kondansatörlü olmak üzere çeşitli tipleri vardır.
1) Kondansatörsüz Motor (Standart motor) :
Yardımcı sargılı kondansatörsüz bir motorun imalatı iyi yapılmışsa, ilk kalkınma momenti (start momenti) en az normal yük döndürme
momentine eşittir, iyi bir motorun ilk kalkınma momenti en çok nor mal yük döndürme momentinin 1,5 katı kadar olabilir. Standart mo torlar (kondansatörsüz motorlar), düşük kalkınma momentli ve yol al ma zamanı küçük olan yüklerde kullanılırlar. Yol alma zamanı uzun olan
bir yük standart motor ile çalıştırılırsa, uzun zaman devrede kalacak
olan yardımcı sargı yanar. Çünkü yardımcı sargılar kısa bir zaman çalışacakları göz önünde tutularak yapılmışlardır.
172
2) Kondansatör Startlı Motor :
Kondansatör startlı yardımcı sargılı motorlarda ilk kalkınma momenti, normal yük döndürme momentinin 3,5 ile 4,5 katına kadar çıkabilir. Kondansatör startlı motorların diğer bir üstünlüğü, yardımcı sargıya konan kondansatör dolayısıyle motorun ilk kalkınmada şebekeden
çektiği akım da biraz düşük olur. Yalnız kalkınma akımındaki bu düşüklük, hiçbir zaman kalkınma momentindeki artış oranında değildir.
Yardımcı sargılı standart motoru (kondansatörsüz motor) kondansatör startlı motor haline çevirebilmek için, seçilecek uygun bir kondansatörü yardımcı sargı devresine bağlamak gerekir. Tablo I de motorların güçlerine göre gerekli kondansatör değerleri verilmiştir.
Tablo I : Yardımcı sargılı motorlann güçleri, devirleri, gerilimleri,
akımları ve yaklaşık kondansatör değerleri verilmiştir.
Tablo I:
Tam Kapalı,
Pervane
Soğutmalı, ayaklı bir fazlı Asenkron Motorların
(Yardımcı Sargılı Motorlann) Karakteristik Değerleri
Kondansatörler genellikle motorlar üzerine monte edilirler. Yalnız,
yolvermede kısa bir zaman için devrede kalacak olan kondansatörler genellikle 'Elektrolitik' kondansatörlerdir. Elektrolitik kondansatörler uzun
zaman devrede kalırlarsa patlarlar.
3) Çift Kondansatörlü Motor :
Çift kondansatörlü bir fazlı asenkron motorun bağlantı şeması şekil 11.16 da görülüyor, ilk kalkınmada daha büyük kapasitede kondansatöre ihtiyaç vardır. Motor normal devrine ulaştığında daha küçük kapasiteli kondansatör yeterlidir. Startta kısa bir zaman için kullanılan
elektrolitik kondansatörleri daimi çalışmada kullanamayız. Bunun için
şekil 11.16 da görüldüğü gibi, daimi olarak devrede kalacak olan yağlı
kağıt kondansatör C lf yardımcı sargıya direk bağlıdır. Santrifüj anahtarla elektrolitik kondansatör (C 2) birinci kondansatöre paralel bağlıdır..
Sekil 11.16 Çift kondansatörlü yardımcı sargılı motor.
ilk yolvermede santrifüj anahtar kapalı olduğu için Cj ve C 2 kondansatörleri paralel bağlı olarak yardımcı sargı devresine seri olarak girerler. Böylece yardımcı sargı devresindeki kondansatörün kapasitesi ilk
kalkınmada (C1 + C2> olur. Motor normal devrine yaklaşınca santrifüj
anahtar açılır. Elektrolitik kondansatör devreden çıkar. Yardımcı sargı
Cl kondansatörü ile birlikte devrede kalır ve motor çalışmasına devam
eder.
Şekil 11.17 de bir kağıt kondansatör ve oto trafo kullanarak çift.
kondansatör etkisinin elde edilişi görülüyor.
Sekil 11.17 Yardımcı sargılı motorda çift kondansatör etkisinin oto trafo
ile elde edilişi.
4) Daimi Kondansatörlü Motor :
Bu motorda yardımcı sargı ve ona serî bağlı olan kondansatör s tart* ta
ye çalışmada devamlı devrede kalır. Kondansatör devamlı devrede kalacak tipte yapılmış, yağlı kâğıt kondansatördür. Şekil 11.18 de daimi kondansatörlü yardımcı sargılı motorun bağlantı şeması görülüyor.
Bu motorlarda santrifüj anahtar yoktur, ilk kalkınma momenti biraz düşük, % 50 - % 100 tam yük momenti civarındadır. Daimi kondansatörü) motor çok düzgün ve sessiz çalışır; santrifüj anahtarın olmamasından dolayı daha az bakıma ihtiyaç gösterirler. Genellikle vantilatör,
aspiratör, bürlörlerde ve sessiz çalışmanın arzu edildiği yerlerde bu motorlar kullanılırlar.
Şekil 11.18 Daimi Kondansatörlü motor,
S. Devir Ayan :
Üç fazlı asenkron motorlarda olduğu gibi, yardımcı sargılı motor-
nr: Rotorun devir sayısı, d/d.
f : şebeke frekansı, Hz.
P : Çift kutup sayısı,
S : % kayma.
ların da devir sayıları, kutup sayılarına ve şebeke frenkansına bağlıdır.
Yardımcı sargılı motorların boştaki devirleri ile tam yük altındaki
devirleri % 2,5 ile % 5 arasında değişir. Bunun için üç fazlı asenkron
motorlarda olduğu gibi, bu motorların da devirleri sabittir.
iki devirli yardımcı sargılı motor elde edebilmek için iki ayrı ana
sargıya ve iki ayrı yardımcı sargıya ihtiyaç vardır, örneğin, statora 4
kutuplu ana ve yardımcı sargılar yerleştirildikten sonra, 2 kutuplu ana
ve yardımcı sargılar yerleştirilir. Böylece iki değişik devir elde edilir.
Yük altında çalışan bir yardımcı sargılı motora uygulanan gerilim
düşürülürse, motorun döndürme momenti uygulanan gerilimin karesine
bağlı olarak azalacaktır. Döndürme momentinin azalması motorun devrinin düşmesine, kaymanın büyümesine neden olur. Kaymanın artması
rotordaki bakır kayıplarının artmasına sebep olduğu halde, küçük motorlarda bu kayıp ihmâl edilebilir, (rotor bakır kaybı önemsenmeyecek
bir değerdedir).
Daimi kondansatörlü yardımcı sargılı motora uygulanan gerilim oto
trafo ile değiştirilmek suretiyle devir ayan yapılır. Motorların yük altında devirlerinin ayarı için kullanılan, şekil 11.19 da üç değişik bağlantı
(b) Devir ayan
şeması görülüyor*
(c) Devir ayan
Şekil 11.19 Daimi kondansatörü! motorun devir sayısının oto trafo ile üç değişik
sistemde kontrol edilişi.
Şekil 11.19 (a) da yardıfncı sargı ve ana sargı paralel bağlandıktan
sonra gerilim uygulanmıştır. Oto trafo ile kademe kademe motora uygulanan gerilim düşürülerek devir kontrol ediliyor. Motordaki her iki
sargıya uygulanan gerilim aynı ve birlikte düşürülüyor. Bu yöntemde
düşük devir kademesinde motorun kalkınma momenti zayıf olur.
Şekil 11.19 (b) deki yöntemde, yardımcı sargıya uygulanan gerilim
sabit tutularak, ana sargıya uygulanan gerilim düşürülmek suretiyle devir ayarlanmaktadır. Bu yöntemde, bütün kademelerde iyi bir kalkın ma momenti elde edilir. Dolayısıyle, çok sık kullanılır.
Şekil 11.19 (c) incelendiğinde, ana sargıya uygulanan gerilim dü~
sürülürken, yardımcı sargıya uygulanan gerilimin artırıldığı görülür.
Kalkınma momenti her kademede de iyidir.
Daimi kondansatörlü yardımcı sargılı motorlarda yapılan bu devir
kontrolü aspiratör ve vantilatör gibi yüklerde iyi netice verir. Bu yön temle küçük vantilatörlerde devir % 70 e kadar, normal vantilatörlerde
devir % 60'a kadar, büyük vantilatörlerde % 50'e kadar düşürülebilir.
Yardımcı sargılı motorların devir yönlerini değiştirmek için ans
sargının veya yardımcı sargının uçları değiştirilir. Şekil 11.20 de motorların devir yönünün nasıl değiştirildiği görülüyor.
d) Yardımcı Sargılı Motorlann Kullanıldığı Yerler :
Yardımcı sargılı motorların çok geniş bir kullanma alanı vardır. Bir
fazlı motorlar içinde en büyük güçlü bu motorlar yapılırlar. En büyük,
yardımcı sargılı motor 1,5 — 2 Hp gücündedir.
•(a) Normal çalışma
(b) Yardımcı sargının
(c) Ana sargının uçları deuçları değiştirilir.
ğiştirilir.
Şekil 11.20 Yardımcı sargılı motorun devir yönünün değiştirilişi,
Buz dolabı ve çamaşır makinası motorları yardımcı sargılı motorlardır. Matkap, vantilatör, aspiratör, küçük su türbini, küçük seyyar taşlama motorları yardımcı sargılı motorlardır.
3. YARDIMCI KUTUPLU (GÖLGE KUTUPLU) MOTORLAR
Yapımı en ucuz ve en basit olan motorlardan biride yardımcı ku tuplu (gölge kutuplu) motorlardır. Bu motorlar çok küçük güçten 0,15
Hp ye kadar yapılırlar.
a) Motorun Yapısı :
Stator : Şekil 11.21 de yardımcı kutuplu motorların iki tipi görülüyor. Bu motorlarda statorlar çıkıntılı kutuplu olarak sa<J paketlerinden
yapılırlar. Kutupların birer kenarlarına yarık açılmış ve buraya bakır
halkalar takılmıştır. Çıkıntılı kutuplara bobinler yerleştirilir.
(a) Yardımcı kutuplu motor
(b) Yardımcı kutuplu motor
(c) Stator ve rotor saç paketleri Şekil 11.21 Yardımcı
kutuplu motor tipleri ile stator ve rotor saç paketleri
Rotor : Yardımcı kutuplu motorların rotorları kısa devreli rotorlardır. Üç fazlı asenkron motorun kısa devreli rotorundan hiçbir farkı
yoktur. Şekil 11.21 de kısa devreli rotorlarda görülüyor.
b) Motorun Çalışma Prensibi :
Yardımcı kutuplu motorun stator sargılarına l fazlı alternatif emk
uyguladığımızda sargılardan sinüsoidal akım geçer. Bu akım dalgalı bir
manyetik akı meydana getirir. Stator sargılarından geçen akım yön değiştirince, manyetik akı da akıma bağlı olarak yön değiştirir.
Şekil 11.22 Kutup bobininden geçen akıma göre meydana gelen manyetik
akının değişimi.
•
•
Yardımcı kutuplu motorun bir kutbunu ele alarak, akımın yarım
peryotluk değişmesinde kutbun manyetik akısındaki değişiklikleri ince-
•
•
üyelim. Kutbun meydana getirdiği manyetik akının değişimi şekil 11.22
<ie görülüyor.
1) Kutup bobininden geçen akım, O dan pozitif maksimuma yakın
(a) değerine doğru artarken, kutbun manyetik akısıda artacaktır. Ar
tan manyetik akı, bakır halka üzerinde bir emk endükler, bu da bakır
.halkadan eııdüklem akımının geçmesine sebep olur. Lenz Kanununa gö
re, bakır halkadan geçen endüklem akımı kendisini meydana getiren
manyetik akının artışına mani olacak şekilde (yani zıt yönde) manye
tik alan meydana getirir. Yardımcı kutbu meydana getiren bakır hal
kanın bulunduğu kutup parçasmdaki manyetik akı zayıflamış olur. Ku
tup yüzeyinde manyetik akının düzgün dağılışı bozulduğu için manyetik
akı ekseni kutbun bir tarafına doğru kaymış olur, şekil 11.22 A.
2) Kutup bobininden geçen akım a ve b arasında maksimuma çok
yakındır. Bu kısımda akımdaki değişme çok küçüktür. Kutbun meyda- *
ııa getireceği manyetik akıda çok az değişecek yani akı sabit olacaktır.
Sabit manyetik alan içindeki bakır halkada hiçbir emk endüklenmez ve
bakır halkadan geçen akım sıfır olur. Bakır halkanın etkisi olmayınca,
manyetik akı kutup yüzeyine düzgün olarak yayılır. Manyetik akının ek
seni kutbun ortasına doğru kayar. Şekil 11.22 (B) de bu durum görü
lüyor.
3) Ş'ekil 11.22 (C) de görüldüğü gibi, maksimum değeri geçmiş olan
akım azalarak sıfıra düşer. Kutbun manyetik akısı da azalmaya başlar.
Manyetik akının azalması bakır halkada bir emk endükler ve bakır hal
fadan endüklem akımı geçer. Bakır halkadan geçen endüklem akımının
meydana getireceği manyetik akının yönü, azalan kutup akısının azalmasını önlemek için kutup alanı ile aynı yöndedir. Bu durumda bakır
halkanın bulunduğu kutup yüzeyinde manyetik alanın yoğunluğu artar.
Böylece, manyetik akının ekseni bakır halka (yardım'cı kutup) tarafına
doğru kayar.
Kutup bobininden pozitif yanm peryotluk akım geçince, N kutbu
meydana geldi ve manyetik akı kutup yüzeyinde bakır halkaya doğru
Tcaydı. Bobinden akımın negatif yarım peryodu geçerse, S kutbu meydana gelir ve manyetik akı gene kutup yüzeyinde kutbun bir tarafın dan bakır halkaya doğru kayar. Şu halde, akım yön değiştirdikçe kutup değişiyor (N ise S kutbu oluyor), yanlız, manyetik akının kutup
yüzeyinde kayması hep aynı yönde bakır halkaya (yardımcı kutba) doğru olur.
Şekil 11.21 (b) deki yardımcı kutuplu motora l fazlı alternatif emk
uyguladığımızı kabul edelim. Bobinden sinüsoidal bir akım geçer. Akımın pozitif yarım peryodu geçerke-n N ve S kutuplan meydana gelir, ve
manyetik akılar kutup yüzeyinde bakır halkaya doğru kayarlar. Akım
yön değiştirdikten sonra, negatif yarım peryot geçerken kutuplar de ğişir, (N kutbu S, S kutbu da N olur). Manyetik akının kutup yüzeyinde
kayması gene bakır halkaya doğru olur. iki kutbun ortasındaki kısa
devreli rotor çubukları üzerinde değişen manyetik akı emk'ler endük ler ve kısa devreli rotor çubuklarından da indüklem akımları geçer. Rotor
manyetik alan meydana getirir. Kutup yüzeyinde manyetik akının
kayması rotorun bir tarafındaki kutupda bir yöne ise, rotorun diğer tarafındaki kutupda ise ters »yöne doğrudur. Manyetik akının kutup yüzeyinde kayması sanki kutup ctânüyormuş gibi rotor üzerinde bir etki
yapar. Meydana gelen döndürme momentinin etkisi ile rotor manyetik
akının kayma yönünde, yani yardımcı kutuplara doğru, dönmeye başlar.
c) Yardımcı Kutuplu Motorların özellikleri :
Yardımcı kutuplu motorlar, yapılarının basitliği sebebi ile ucuza
mâl olurlar. Bu motorların en önemli özelliklerinden biri de çok sessiz
çalışmalarıdır.
Bu motorların istenilmeyen özellikleri (mahzurları) şunlardır:
1) Yardımcı kutuplu motorların kalkınma (start) momentleri dü
şüktür.
2) Yardımcı kutuplu motorların aşırı yük kapasiteleri çok düşüktür.
3) Yardımcı kutuplu motorların verimleri düşüktür.
Yardımcı kutuplu motorlar, en büyük, yaklaşık olarak, (1/6) Hp
gücünde, en küçük de (1/250) Hp gücünde olmak üzere çok değişik güçte
yapılırlar.
Yardımcı kutuplu motorların tam yük momentleri genellikle % 10 % 25 gibi oldukça yüksek kaymalarda meydana gelir. Bu motorların
maksimum momentleri tam yük momentinin 1,25 katı kadardır.
Çok küçük güçlü yardımcı kutuplu motorların verimleri % 5 gibi
küçük bir değerdir. Büyük güçlü motorlarda verim % 35'e kadar çıkabilir.
Yardımcı kutuplu motorlar aspiratör ve vantilatörlerde kullanıldıkların da motoru soğutmak için ayrıca motorun rotoruna pervane koy-
»maya gerek yoktur; vantilatörün, motorun etrafında meydana getirdiği
llıava akımı aynı zamanda motoru soğutur.
Yardımcı kutuplu (gölge kutuplu) motorların devir sayıları uygulanan gerilimle değişir. Yük altında çalışan yardımcı kutuplu motora uygulanan gerilim düşürülerek devir kontrol edilebilir. Motora uygulanan
gerilim üç şekilde değiştirilir.
a. Kademeli oto trafo ile motora değişik gerilimler uygulanır.
b. Kademeli bir reaktans bobini (şok bobini) veya direnç motora
.seri bağlanır. Reaktans bobini ve direnç kademeli olarak motor devre
sine sokularak bunlarda düşen gerilim artırılmak suretiyle motorun uç
larındaki gerilim değiştirilir.
c. Motorun stator bobinlerinden uçlar çıkarılır, şebeke gerilimi sta
tor sargısının tamamına, veya bir kısmına uygulanır.
Şekil 11.23 de üç çeşit devir kontrol yönteminin bağlantı şemaları
görülüyor.
(a) Oto trafo ile devir sayısının kontrolü.
(b) Seri reaktans bobini ile devir kontrolü.
(c) Bobinden kademeli uçlar çıkarıp şebeke geriliminin uygulanışı ile
devir kontrolü.
Şekil 11.23 Yardımcı kutuplu motorlarda devir sayısı kontrol yöntemleri.
Yardımcı kutuplu motorlarda devir yönü sabittir değiştirilemez. Bakır halkalar yerine şekil 11.23 (d) de görüldüğü gibi yardımcı kutuplar sargılı yapılır ve bir anahtarla çapraz olarak kısa devre edilirse, devir yönü değişir.
Sekil 11.23 (d) Devir yönünü değiştirme yöntemi.
d) Kullanıldığı yerler :
Sessiz çalıştıkları için bu motorlar pikap ve teyplerde çok kullanılırlar. Küçük vantilatör ve aspiratörlerde de yardımcı kutuplu motorlar
kullanılır.
4. RELÜKTANS MOTOR :
a) Yapısı :
Relüktans motorlar yapılışları bakımından yardımcı kutuplu motorlara benzerler. Statorları şekil 11.24 (a) ve (b) de görüldüğü gibi,
saç parçalarından paketlenerek yapılmışlardır. Yardımcı kutuplu (gölge
kutuplu) motordaki çıkıntılı kutuplardaki bakır halkalar yerine, kutup
yüzeylerinin bir kısmı hava aralığı fazla olacak şekilde oyulmuştur. Ortadaki rotor ile kutuplar arasında kutbun bir kısmında hava aralığı çok
küçük, diğer kısmında ise hava aralığı büyüktür. Hava aralığv büyük
olan kısım manyetik akının geçişine büyük direne gösterir. Çok küçük
olan hava aralığı ise manyetik akının geçişine daha küçük manyetik direnç (relüktans) gösterir.
Şekil 11.24 Rclüktans Motor çeşitleri.
Kutupların ortasındaki rotor kısa devreli rotordur. Rotor üç fazh
asenkron motorun kısadevreli rotoru gibidir.
b) Çalışma Prensibi:
Relüktans motorun çalışması yardımcı kutuplu motorun çalışmasına benzer. Stator sargısına bir alternatif emk uygulayınca bobinden si*
nüsoidal bir akım geçer, değişen bir manyetik akı meydaua gelir. Statorun N kutbundan S kutbuna doğru giden kuvvet çizgileri, büyük hava
aralığından geçerken büyük bir manyetik dirençle (relüktansla),"küçük
hava aralığından geçerken de daha küçük bir manyetik dirençle (relüktansla) karşılaşırlar. Dolayısıyle, kutupların manyetik akıları, kutup
yüzeylerinde daha küçük manyetik direnç (relüktans) gösteren kısma
doğru kayarlar. Şu halde, kutupların manyetik akıları her yarım peryotta yön değiştirirler, aynı zamanda manyetik akı kutup yüzeyinde geniş hava aralıklı kısımdan küçük hava aralıklı kısma doğru kayar. Kutupların meydana getirdiği manyetik akının bu kayması, yardımcı kıı -
tüplü motorların kutuplarındaki akı kaymasına benzetilebilir, kutupların
ortasındaki kısa devreli rotor, manyetik akının kutup yüzeyindeki hareketine uyarak döner.
Manyetik akının kayması, büyük hava aralığı olan kısımdan küçük
hava aralığı olan kısma doğru olduğu için rotorda bu yöne doğru döner.
c) Relüktans Motorlann özellikleri :
Relüktans motorda endüksiyon motoru (asenkron motor gibi,) dur.
J Çünkü, rotora enerji endüksiyon yolu ile iletilir.
Relüktans motorların kalkınma (start) momentleri yardımcı kutuplu
motorlardan daha düşüktür. Bu motorların aşırı yük kapasiteleri ve
verimleri, yardımcı kutuplu motorlar gibi, çok düşüktür.
Relüktans motorların devir yönleri daima geniş hava aralıklı kısımdan dar hava aralıklı kısma doğrudur. Bu motorların devir yönü
değiştirilemez. Motorun devir yönünü değiştirmek gerektiğinde rotor,
statora ters sokularak montaj edilir.
Relüktans motorun devir sayısı, oto trafo ve seri reaktans bobini
yardımı ile motora uygulanan gerilim değiştirilerek ayarlanır. Şekil 11.25
de devir sayısının değiştirilişi görülüyor.
(a) Oto trafo ile devir ayarı.
(b) Seri reaktansla devir ayan. Sekil
11.25 Relüktans motorun devir ayar bağlantıları.
d)
Kullanıldığı Yerler :
Relüktans motorlar, yardımcı kutuplu motorlar kadar fazla kullanılmazlar. Bu motorlar küçük ebatta yapılırlar Start ve aşırı yük momentlerinin düşük olması gerekli olan yerlerde kullanılırlar.
5. REPÜLSÎYON MOTOR
Yardımcı sargılı kondansatörlü motorlardan önce, yüksek kalkınma
momentinin gerekli olduğu yerlerde hep repulsıyon motorlar kullanılıyordu.
a) Repülsiyon Motorların Yapısı :
Repülsiyoo motorların statorları yardımcı sargılı motorların veya
üç fazlı asenkron motorların statorlarına benzer. Yalnız ana sargısı olan
bir yardımcı sargılı motorun statoru, repulsıyon motorun statorundan
hiçbir farkı yoktur. Repülsiyon motorların statoruna yerleştirilen bir
fazlı sargı yardımcı sargılı motorlarda olduğu gibidir. Bobinler sipıral
(el sargı) şeklindedir. Şekil 11.26 (a) da repulsıyon motorun statoru
görülüyor.
(a) Stator
(b) Rotor Fırçalar
kısadcvrc edilmiş
(c) Ropülsüyon motor Şekil 11.26 Repülsiyon
motor, motorun statoru ve rotoru (endüvisi)
Repülsiyon motorun rotoru, doğru akım dinamo ve motor en düvisinin aynıdır. Yalnız repülsiyon motorlarda fırçalar kısa devre edilmiştir. Şekil 11.26 (b) de repülsiyon motorun rotoru görülüyor. Şekil
11.26 (c) de de repülsiyon motorun bağlanışı gösterilmiştir.
b)
Repülsiyon Motorun Çalışma Prensibi :
Statordaki bir fazlı sargıya alternatif emk uygulandığında geçen
akım, sargının kutup sayısına göre kutuplar meydana getirir, îki kutuplu stator sargısından geçen her hangi bir andaki alternatif akımın
şekil 11.27 (a) da görüldüğü gibi, N ve S kutuplarını meydana getirdi ğini kabul edelim. N kutbundan çıkan manyetik kuvvet çizgileri orta daki endüviden geçerek S kutbuna gelirler, buradan da gövdeden N kutbuna dönerler. Kutupların meydana getirdiği değişen manyetik akı, endüvi sargılarında emk'ler endükler. Kollektör dilimine sürtünen fırçala -
nn kutup ekseninde kısa devre edildiklerim kabul edelim. Endüvide endüklenen emk'lerin etkisi ile kısa devre fırçalardan emdüklem akımı geçer. Şekilde görüldüğü gibi, endüvi bobinlerinden geçen akımlar kutup
ekseninin bir tarafında bir yönde, diğer tarafında da ters yöndedir.
Kısaca ifade edersek, değişen* manyetik alan içinde bulunan endüvi
sargılarında emk'ler endüklenir. Fırçalar kısa d^vre edilmiş olduğundan
endüvi iletkenlerinden endüklem akımları geçer. Kutup ekseninin bir tarafındaki endüvi iletkenlerinden geçen akımlar bir yönde ise, diğer ta raftaki iletkenlerden geçen akımlar ters yöndedir. Endüvi iletkenlerinden
geçen bu akımlar endüvide şekil 11.27 (a) da görüldüğü gibi, N ve S ku tuplarım meydana getirirler. Statorun N kutbunun karşısında endüvinin
N kutbu, statorun S kutbunun karşısında da endüvinin S kutbu vardır.
Karşılıklı olan aynı adlı bu N-N-ve S-S kutupları birbirini iterler. Kutupların itme kuvvetleri kutup ekseni doğrultusunda ve aynı zamanda
birbirine zıt olduğu için endüvide bir döndürme momenti meydana ge tirmezler. Bu durumda endüvi dönmez.
(a) Fırçalar kutup ekseninde
(b) Fırçalar kutup ekseninden kaydırıl mış.
(c) Fırçalar kutup ekseninden kaydırılmış.
Şekil 11.27 Repülsiyon Motorun Çalışması.
Şekil 11.27 (b) de görüldüğü gibi, fırçaları kutup ekseninin sağına
doğru kaydıralım. Kısa devreli fırçalardan geçen akım endüvi sargılarından da geçer. Endüvinin meydana getirdiği N ve S kutupları da fırçalarla birlikte kaymıştır. Statorun N kutbu endüvinin N kutbunu, statorun S kutbuda endüvinin S kutbunu iter. Bu itme kuvvetleri endüv
üzerinde bir döndürme momenti meydana getirirler. Endüvi bu döndür
me momentinin etkisi ile saat ibresi yönünde dönmeye başlar.
Fırçalan şekil 11.27 (c) de görüldüğü gibi, saat ibresinin ters ye
nüncle kaydırdığımızda, endüvi kutuplarıda bu yöne fırçalar kadar k£
yar. Statorun N kutbu endüvinin N kutbunu, statorun S kutbuda endi
vinin S kutbunu saat ibresinin ters yönün de iterler. Meydana gelen döı
durma momenti endüviyi saat ibresinin ters yönünde döndürür.
Fırçalan kutup ekseninden 90° kaydırdığımızda, endüvide endükl
nen emk'ler birbirini-yok ettikleri için, fırçalar ar&sındaiki emle sıfır olu
Kısa devre edilen fırçalardan akım geçmez. Endüvi sargılarından akım
geçmeyince, endüvide kutuplar meydana gelmez. Stator kutuplarının etkileyeceği endüvi kutupları olmayınca döndürme momenti meydana gelmez ve endüvide dönmez.
Statora uygulanan alternatif akım yön değiştirdiğinde statorun kutupları değişirken, endüvinin de kutupları değiştiği için endüvi fırçaları
kaydırdığımız yönde dönmesine devam eder. Dönen endüvide meydana
gelen kutuplar, fırça ve kollektör dilimleri yardımı ile daima aynı yerde, yani fırçaların hizasında bulunurlar. Endüvi döndüğü halde endüvinin kutupları dönmez. Statorun kutupları endüvinin kutuplarını itmeye
devam ederek endüvinin dönmesini sağlarlar.
Endüvideki doğru akım sargılarının altına sincap kafes (kısa devreli rotor sargısı) sargısı yerleştirilerek yapılan motora Repülsiyon
Startlı Asenkron Motor' (Repülsiyon yol vermeli • asenkron motor) de nir. Bu tip motorlara bir fazlı A.A uygulandığında repülsiyon motor
olarak çalışır (repülsiyon motor olarak yol alır), devir sayısı yükselince santrifüj kuvvetle çalışan endüvi milindeki mekanik tertibat çalışarak fırçalan kollektör dilimlerinden kaldırır. Bu durumda, yardımcı
sargılı motorlarda olduğu gibi, kısa devreli rotor dönmesine devam
eder.' Şekil 11.28 sincap kafesli endüvi görülüyor.
Bazı repülsiyon startlı asenkron motorlarda, motor ilk hareketi re j
pülsiyon prensibi ite alır. Hızı belirli bir yüksekliğe ulaşınca, santrifüj -lü
mekanik tertibat çalışarak fırçalan kollektör dilimlerinden kald'nr -ken
kollektör dilimleri metal bir halka ite kısa devre edilir. Bu durum-
da, endüvi kısa devreli rotor haline dönüştürülmüş olur. Endüvi kısa
devreli rotor olarak dönmesine devam eder. Şekil 11.29 da endüvinin miiindeki santrifüj kuvvetle çalışan mekanik düzenek görülüyor.
Repülsiyon Motorun RotoruntUki Kollektörün ve Santrifüj Fır«» Kaldırma V» Kollefclor
Dilimlerini Kısa Devre Etme Tertibatının Görünüşii.
(a)
Repüiılyon Yolvermeü Encfölcıiyen Motorunda Kus Dovre Editi T*r»;baSın GSrSnCfO.
(b)
5eMl 11.29 Repülsiyon startlı ascnkron motorun endüvisi ve santrifüj
kuvvetle çalışan mekanik düzenek.
c)
Repülsîyon Motorların özellikleri :
Normal repülsiyon motorların ve repülsiyon starth asenkron motorların ilk kalkınma momentleri, kondansatörlü yardımcı sargılı motorların ilk kalkınma momentleri kadardır. Bu motorların ilk kalkınma
momentleri % 300 ile % 350 tam yük döndünne momenti civarındadır.
Repülsiyon motorların ilk kalkınma akımları, kondansatörlü yardımcı
sargılı motorların ilk kalkınma akımlarından ortalama % 30 - % 40»
daha küçüktür. Dolayısiyle, repülsiyon motorların uçlarındaki, kalkınmadaki gerilim dalgalanması daha küçüktür.
Repülsiyon starth asenkron motorlann tam yük altındaki devir sa-yıları, boş çalışmadaki devir sayılarından % 2,5 - % 5 kadar düşük olur.
Bu motorlar sabit devirli motorlar sınıfına girerler.
Normal repülsiyon motorlann endüvisinde (rotorunda) santrifüj
kuvvetle fırçalan kaldırma ve kollektör dilimlerini kısa devre etme düzeneği yoktur. Normal repülsiyon motorlann devirleri, seri motorlarda*
(üniversal motorlarda) olduğu gibi, yükle değişir. Devir sayısı şebeke
frekansına ve statorun kutup sayısına bağlı değildir.
Normal repülsiyon motorun* ve repülsiyon startlı asenkron motorun «devir yönü, fırçalan kutup ekseninin sağ ve sol tarafına kaydırmak,
suretiyle değiştirilir.
Normal repülsiyon motorlann devir sayılan, fırçalan kaydırarak'
ayarlanır.
Repülsiyon startlı asenkron motorun devir sayısı şebeke frenkan sına ve motorun kutup sayısına bağlıdır.
d) Kullanıldığı Yerler :
Repülsiyon startlı asenkron motorlar yüksek kalkınma momenti istenen yerlerde, kondansatörlü yardımcı sargılı motorlar gibi kullanılır lar. Yardımcı sargılı motorlardan önce repülsiyon motorlar bir fazlı motorların içinde endüstride en fazla kullanılan motorlar idi. Pahalı oluşları sebebi ile daha ucuz olan yardımcı sargılı motorlar repülsiyon motorların yerlerinde kullanılmaya başlanmıştır.
Repülsiyon starth asenkron motorlar 1,5 Hp ve daha küçük güçteyapılırlar. Santrifüj tulumbalannda (su türbinlerinde), matkaplarda, çamaşır makinasında, aspiratörlerde kullanılırlar.
6. KÜÇÜK SENKRON MOTORLAR
Çok küçük güçte olan (1/100 Hp den küçük) bu motorlar iki tipte
yapılırlar.
1) Relüktans Senkron Motor
2) Histerezis Senkron Motor
Bu iki motoru inceleyelim :
l) Relüktans Senkron Motor :
Yapısı: Stator iki üç milimetre kalınlığında demir saçtan şekil 11.30
da görüldüğü gibi yapılmıştır. Bir bobinden geçen akımın meydana getirdiği N ve S kutuplarından 20 - 30 kutup meydana getirilir. Rotor 3-4
milimetre kalınlığında çelik saçtan çıkıntılı kutuplu olarak yapılmıştır.
.Bu kutuplar daimi mıknatıstır. Şekil 11.30 (b) de görüldüğü gibi çıkıntılı kutuplar, değişik hava aralıkları meydana gelecek şekilde yapılmıştır.
Şekil 11.30 Relüktans Senkron Motor.
Çalışması : Bobine alternatif emk uygulayınca bobinden geçen akım
N ve S kutuplarını meydana getirir. Bobinden geçen akımın yönü değiştikçe N ve S kutupları değişir. Bu 20-25 adet küçük kutupların da
d2gişmesine sebep olur. Böylece döner alan meydana gelir. Daimi mıknatıslı çıkıntılı kutuplu rotorda, değişik hava aralığı sebebi ile relüktans
döndürme momenti meydana gelir ve rotor döner. Dönen rotorun çıkıntılı kutupları statorun döner alanına uyarak senkron hızla dönmeye başlar.
2) Histerezis Senkron Motor :
Yapısı: Bu motorun yapısı şekil 11.31 de görülüyor. Stator yardımcı kutuplu motorların statoru gibi, saç paketlerinden yapılmış ve kutuplara bakır halkalar yerleştirilmiştir.
Rotor, histerezis kaybı büyük olan 2-3 mm kalınlığında çelik saçlardan, şekildeki gibi, yapılmıştır.
Şekil 11.31 Histerezis Senkron Motor
Çalışması :
Bobine alternatif emk uygulanınca yardımcı kutupların etkisi ile rotor döner. Rotorun bu yapısı sebebi ile, histerezis kaybı büyük olan rotor çelik sacından statorun manyetik akısı geçince, rotorda N ve S kutupları meydana gelir. Rotorun kutupları statorun değişen kutuplarına
uyarak senkron hızla dönmeye başlar.
Senkron Motorların özellikleri :
Bu iki tip senkron motorda çok küçük güçte yapılırlar, avuç içine
sığabilir. Güçleri 3-5 veya 10 vat civarındadır.
Bu motorların devir sayıları sabittir. Devir sayısı şebeke frekansına bağlıdır.
Bu motorlar çok sessiz çalışırlar.
Motorların Kullanma Yerleri :
Zaman rölelerinde senkron motorlar kullanılır. Bir fazlı alternatif
akımla çalışan zaman saatlarındaki motorlar histerezis senkron motorlardır. Otomatik kumanda sistemlerinde belirli zamanda belirli hareketleri yaptıran mekanik düzenler hareketlerini senkron motorlardan alır lar.