2. HAREKET DENKLEMLERİ
Sinkrotron hızlandırıcılarında, yüklü parçacıklar dipol ve doğrusal bölümlerin tanzimiyle
tanımlanan kapalı bir yörüngeyi takip etmeye zorlanırlar (Şekil 2.1). Bu kapalı yörünge,
sinkrotronların tasarımındaki ideal yörüngedir.
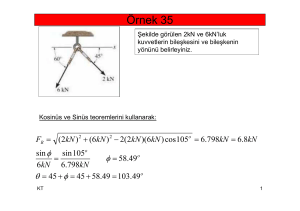
Şekil 2.1. Bir sinkrotron için referans çerçevesi ve ideal yörünge
Sinkrotron hızlandırıcıları parçacık demetlerini uzun bir süre boyunca hızlandırmak ve
saklamak için güvenilir makineler olmalıdırlar. Bu yüzden parçacıkların tüm zamanlarda ideal
yörüngeye en yakın olacağı başlangıç koşullarını tespit etmek esastır. Bu ideal yörüngenin
kararlılık problemidir. Sinkrotronlarda; magnetlerin, doğrusal bölgelerin ve RF boşluklarının
yerleştirilmesinde sağlam bir tasarım yapılmak zorundadır. Parçacıkların momentumunun
doğrultu ve büyüklüğündeki küçük hatalar, hızlandırma ve sınırlandırılmış alanlardaki
kusurlar demetlerin dinamiğine sezilebilir bir etki yapmamalıdırlar.
Sinkrotronun ideal yörüngesinin kararlılık ile güneş sisteminin kararlılık problemi yakın
benzerlik gösterir [Mos78]. Her ikiside küçük düzensizliklerin periyodik hareketi etkilemesi
ile ilgilidir. Bununla beraber, söz konusu gözlem süreleri tamamen farklıdır. Bir hızlandırıcı
demetinin 1010 devir mertebesinde olan dolanım sayısı, dünyanın yörüngesindeki dolanım
sayısı ile ile karşılaştırılırsa, 1010 devir için geçecek süre olan 1010 yıl, gerçekte dünayanın
yaşından 102 mertebe daha büyüktür.
Genellikle parçacık demetleri Gaussiyen bir şekle sahiptir ve herbiri ideal yörüngeye yakın bir
yörüngeyi takip etmek zorundadırlar. Demetlerin tutarlılık ve ömürlerini sürdürmeleri için,
parçacıklar ideal yörüngedeki kastedilen pozisyonda enine salınırlar. Bu enine salınımların
devamlılığı, magnet kafesi boyunca bulunan değişken gradyent kuadropol çiftleri ile sağlanır.
28
Makinedeki sekstupoller boyuna momentum hatalarını düzeltmek için ve RF boşlukları
parçacıkları hızlandırmak için yerleştirildiğinde, lineer olmayan etkiler ideal yörüngenin
kararlılığını etkileyerek, demetin dinamiğini bozarlar.
Eğer demetlerin yoğunluğu küçükse, ideal yörüngenin kararlılığını sağlamak zor değildir.
Demet içinde bulunan saçılma ve uzay-yükü etkileri ihmal edilebilir ve hızlandırıcıdaki
magnetik alanlar sadece dipoller ve kuadropollerdir. Burada, sinkrotronun ideal yörüngesinin
kararlılık problemi sinkrotron vakum odası boyunca yüklü parçacığın genel hareket
denklemeleri çıkartılarak formüle edilmiştir. Doğrusal bölgelerin, dipollerin, kuadropollerin,
RF
boşluklarının
bulunduğu
durumlardaki
ideal
yörüngenin
kararlılığının
analizi
yapılmaktadır. Sonuçlar bununla ilgili diğer lineer olmayan problemlerin analizi için temel
oluşturacaktır.
2.1. Enine Düzlemdeki Hareket Denklemleri
Sinkrotron ideal yörüngesi başlangıçtan beri dairesel şekle yakın olan bir kapalı yörüngedir.
İdeal yörüngenin yatay düzlemde olduğunu ve Z yönünde magnetik alan içeren dipolü göz
önüne alabiliriz. Laboratuar referans çerçevesi (X,Y,Z) ‘nin orijini ideal yörüngenin iç
bölgesinde bir noktadır (Şekil 2.1).
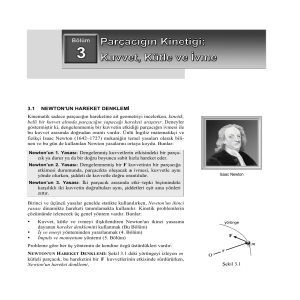
Şekil 2.2. Bir sinkrotronun, dipolleri, doğrusal bölgeleri, kuadropol ve
sekstupolleri içeren örgü parçası ve yerel ideal yörüngesi.
Tasarım aşamasında, demet hemen hemen ideal yörüngeyi takip eden eşzamanlı parçacık
tarafından tanımlanmıştır. İdealde, demetin kütle merkezi eş zamanlı parçacığın konumudur.
Sinkrotronun ideal yörüngesi, eş zamanlı parçacığın yörüngesidir. İdeal yörüngenin
kararlılığı, eş zamanlı parçacığa yakın başlangıç koşulları ile parçacığın yörüngesinin
sınırlanmaması problemine özdeştir. Demetin kararlılığını çalışmak için, orijini eş zamanlı
parçacıkta veya demetin kütle merkezinde olan bir hareketli referans çerçevesi tanımlıyoruz.
29
Bu referans çerçevesinde, parçacıkların yatay enine hareketi x-ekseni boyunca olan sapmaları
ve dikey enine harekette z-ekseni boyunca olan sapmaları ifade eder (Şekil 2.1). Boyuna
salınımlar eş zamanlı hızlandırma işlemi ile tanımlanır.
Pratik bir bakış açısıyla bakılırsa, ideal yörünge; sıraya dizilmiş dipoller, birbirine eklenmiş
doğrusal bölgeler, elektrik ve magnetik alanlardan bağımsız bölgelerle tanımlanır (Şekil 2.2).
Dipollerde ideal yörünge yarıçaplı (siklotron yarıçapı) bir daire parçasıdır. Doğrusal
bölgelerde ideal yörünge, vakum odasının simetri ekseni tarafından belirlenir. Kuadropoller
ve sextupoller gibi özel amaç magnetlerinin simetri eksenleri doğrusal bölgelerin simetri
eksenlerine denktir (Şekil 2.2).
Genelde, dipollerdeki eğriliğin merkezi laboratuar referans çerçevesinin merkezi ile uyuşmaz.
Böylece tüm hızlandırıcıdaki parçacıkların hareket denklemleri, her bir hızlandırıcı örgü
elemanı içindeki hareket denklemlerinin bir araya gelmesiyle ve ideal yörüngenin sürekliliği
sağlanacak şekilde belirlenir. Şekil 2.1’de verilen ideal yörüngeye dik enine hareket
düzlemlerindeki yüklü parçacıkların yörünge denklemlerini türetmek için iki farklı strateji
türetmek mümkündür. Birinci durumda, sinkrotronun her bir kısım veya elementindeki
hareket Lorentz denklemi ile tanımlanabilir. Bu kuvvetler ele alınan makinenin her bir
elemanı için özel forma sahiptir. Hareketin tam denklemi sinkrotronun her bir kısmındaki
hareket denklemlerinin, sürekliliğini sağlayarak bir araya getirilmesiyle bulunur. Bu koşullar
altında parçacıkların yörüngeleri makinenin (s) boyuna koordinatının sürekli fonksiyonlarıdır,
ama enine hızlar ve kuvvetler sürekli değildir.
İkinci
yaklaşım Hamiltoniyen dinamiğine dayanır. Laboratuar referans sisteminin
koordinatlarında , rölativistik Hamiltoniyen fonksiyonu
H qV W02 c 2 p qA2
şeklindedir. Burada V ve A sırasıyla elektromagnetik alanın skaler ve vektörel
potansiyelleridir. İdeal yörüngeye dik olan düzlemdeki hareket denklemlerini türetmek için,
değişkenlerin laboratuar referans çerçevesi koordinatlarından, harejet referansı çerçevesi
koordinatlarına bir kanonik dönüşümünü gerçekleştirmek mümkündür [CoS58]. Bununla
beraber, bu kabul edilen dönüşümlerin teorisi sinkrotron boyunca sürekli olmayan h
30
fonksiyonunun kanonikliğine sıkı bir şekilde bağlıdır.bu yaklaşım analitik ve Lie grup
perturbasyon (tedirgenme) tekniklerine dayanan gelişimlerin önünü açar [Fo86].
Bu iki yaklaşım farklı doğaya sahiptirler ancak sonuç ikisinde de aynıdır [EdS93]. Genel
olarak, fiziksel güçlüğü ve yaklaşımların doğasını kontrol altına alan ve sinkrotron
tasarımındaki geometrik anlayışa imkan veren ilk yaklaşım benimsenmiştir.
2.1.1. Doğrusal Kısımlardaki Enine Hareket
Sinkrotronların, dış kuvvetlerin bulunmadığı basit doğrusal bölmelerinde, eş zamanlı
parçacıkların hareket denklemleri açıkça elde edilmiştir. Hız sabittir ve eş zamanlı parçacığın
momentumu laboratuar referans çerçevesinde p s mv s e s dir. Burada es hareket doğrultusuna
teğet olan birim vektördür. es= es (ex, ey, ez) şeklinde gösterilir. Lorentz denklemi Lorentz
dönüşümleri altında değişmez olduğundan laboratuar çerçevesinde ve düzgün olarak hareket
eden enine çerçevede hissedilen kuvvetler sıfırdır. Yani enine hareket düzlemine dik
doğrultuda
dp s
= 0 dır. Burada tı eş zamanlı parçacığın onun çerçevesindeki uygun
dt
zamanıdır. Eş zamanlı olmayan parçacık için, Δs’i enine hareket düzleminden orijine olan ve
es doğrultusunda ölçülen uzaklık olarak tanımlarız.
dp s
=0, 1 / 1 v 2 / c 2 , tı=t/γ,
dt
Δpı=mγıdΔs/dtı olduğundan;
2
dp m d 2 s
2 d s
m
0
dt
dt 2
dt 2
2.1
bulunur. Burada t; γı=1 iken vı<<c yaklaşımında tanımlanan laboratuar referans
çerçevesindeki zamandır. 2.1. denklemi eş zamanlı parçacıktan küçük sapması olan eş
zamanlı olmayan parçacığın hareket denklemidir ve rölativistik olmayan sabit momentum
sapması, es boyunca Δpı dür. (s,x,z) koordinatlarındaki eş zamanlı parçacığın uygun referans
çerçevesinde dp / dt m dv / dt mdv / dt 0 denklemlerinden bulunan enine hızlardaki küçük
rölativistik olmayan düzensizliklere izin verilebilir, hareket denklemleri;
m
2
d 2x
dt 2
0 , m 2
d 2z
dt 2
0
2.2
dır. Burada t=γtı laboratuar referans çerçevesindeki uygun zamandır. Şimdi hızlandırıcının
ideal yörüngesi boyunca olan ark’ın uzunluğunun ölçümü olan s parametresini tanımlayalım.
s = vst
31
2.3
olsun, burada vs, eş zamanlı parçacığın boyuna hızıdır. s bağımsız bir koordinat olmak üzere
2.1. ve 2.2. denklemleri aşağıdaki denklere dönüştürülür.
m 2 v s 2
d 2x
ds
2
0 , m 2 v s 2
d 2z
ds
2
0 , m 2 v s 2
d 2 s
ds 2
0
2.4
mγ2vs2 sabit olduğundan üstteki denklemler aşağıdaki şekilde basitleştirilebilir.
d 2x
ds 2
=0,
d 2z
ds 2
=0,
d 2 s
ds 2
=0
2.5
Eş zamanlı parçacık için, başlangıç koşulları ve hızları sıfırdır ve 2.5’in çözümleri x(s) =0,
z(s)=0, Δs(s)=0 dır. Yani doğrusal bölümlerde laboratuar referans çerçevesindeki eş zamanlı
parçacığın boyuna konumu 2.3. denklemi ile tanımlanmıştır ve eş zamanlı olmayan parçacık
enine hareketli düzlem içerisinde düzgün bir harekete sahiptir.
2.1.2. Özel Amaç Magnetleri İçeren Doğrusal Bölmelerdeki Enine Hareket
Sinkrotron makinelerinde, kuadropol ve sextupol gibi özel amaçlı magnetleri 1.6.1. ve 1.6.3.
kesimlerinde tartışıldığı gibi demetlerin optik özelliklerini
kontrol eden statik magnetik
alanlar oluştururlar. Optik özellikler parçacıklar ideal yörünge boyunca enine yayılımları
tarafından belirlendiği için odaklayıcı ve toparlayıcı magnetik alanın ( B ) boyuna bileşeninin
değişimi mümkün olduğu kadar sıfıra yakın olmalıdır. Bu yaklaiım magnetlerin sınırlı
boyutlarına bağlı etkiler ihmal edildiğinde gerçekçi olur. Yani, özel amaç magnetleri
tarafından oluşturulan magnetik alanların sadece enine koordinatlar olan x ve z ‘nin
fonksiyonu olduklarını varsayabiliriz.
Hızlandırıcının vakum boşluğunda akımların ve yüklerin olmama durumda, rot B = 0
Maxwell denklemi tarafından, B = -gradV iken V (x,z) magnetostatik potansiyel fonksiyonu
oluşur. Vektör alan B (x,z) nin bir analitik fonksiyon tarafından tanımlanabildiği hipotez
altında, bunu daha kullanışlı çok kutup formda yazabiliriz [IsN88],
B( x, z ) B z ( x, z ) iBx ( x, z ) B0
n! (b
1
n
ian )( x iz) n
2.6
n 0
Bo dipol kılavuz alanının şiddetidir ve Bo >0 dır. bn/n! ve an/n! ise boyutları [bn]=[an] =m-n
olan n kutuplu magnetik gradiyentlerdir. Tablo 2.1’de n-kutuplu magnetostatik alanın
bileşenleri tanımlanmıştır.
32
B = -gradV olduğundan, magnetostatik skaler potansiyeli an
ve bn parametreleriyle
tanımlanan iki bileşene ayırabiliriz.
V(x,z)= Va(x,z)+Vb(x,z)
2.7
Burada Va ve Vb fonksiyonlarının her ikisi de Laplace denklemini sağlarlar. 2Va ( x, z) =0 ve
2Vb ( x, z) =0’dır (Couchy-Riemann bağıntılarından).
Tablo 2.1. Çokkutup açılımlarından türetilen magnetostatik n-kutup alanları
Çok-kutuplu Magnetik Alanların Bileşenleri
B x / B0
B z / B0 Normal
B x / B0 Skew
B z / B0 Skew
Normal
(bn 0)
(a n 0)
(a n 0)
(bn 0)
(a n 0)
(bn 0)
(bn 0)
(a n 0)
Dipol
n=0
0
a0
b0
0
Kuadropol
n=1
b1z
Sekstupol
b2 xz
b1x
n=2
Oktupol
n=3
3x 2 z z 3
b3
6
Dekapol
n=4
b4
x 3 z xz3
6
b2
a1 x
x2 z 2
2
a2
x 3 3xz 2
b3
6
b4
x2 z 2
2
x 3 3xz 2
a3
6
x 4 6x 2 z 2 z 4
24
a4
x 4 6x 2 z 2 z 4
24
a1 z
a2 xz
z 3 3x 2 z
a3
6
a4
xz3 x 3 z
6
Bu sebeple, Va ve Vb fonksiyonlarının ikisi de birbirleriyle ortogonal olan Va= sabit1 ve
Vb=sabit2 eğrileri ile magnetostatik alanları tanımlarlar [FeL64]. Bu katsayı normal çok
kutuplara ve an katsayısı da birbirne eğrisel olan çok kutuplar karşılık gelir. n-kutuplu
magnetostatik alanlardan magnetostatik potansiyelleri türetebiliriz. 2.6. daki her bir bileşenin
integralinden ve 2.7. ‘nin ayrıştırılmasından, Tablo 2.2’de gösterilen n-kutuplu magnetostatik
potansiyelleri elde edebiliriz. Diğer taraftan, magnetlerin demir gövdesinin iç yüzeyinin eş
potansiyel çizgileri oluşturmasıyla, n-kutuplu magnetlerin iç şekillerin tasarımında Tablo 2.2.’
33
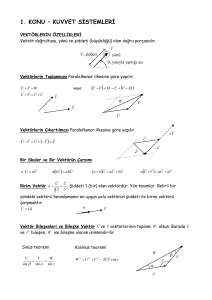
deki ifadeleri kullanabiliriz. Şekil 2.3’de magnetik n-kutupların eş potansiyel çizgileri
gösterilmiş ve karşı gelen magnetik alan bileşenlerin yönleri normal ve eğrisel magnetler için
belirtilmiştir.
Tablo 2.2. Magnetostatik n-kutup potansiyeller
Çok-kutuplu Magnetik Potansiyeller
Vb / B0 Normal
Va / B0 Skew
(bn 0)
(a n 0)
(a n 0)
(bn 0)
Dipol
b0 z
a0 x
Kuadropol
b1 xz
Sekstupol
a1
z2 x2
2
b2
z 3 3x 2 z
6
a2
3xz 2 x 3
6
b3
xz3 x 3 z
6
a3
6x 2 z 2 x 4 z 4
24
b4
10 x 2 z 3 5x 4 z z 5
120
a4
10 x 3 z 2 5 xz 4 x 5
120
Oktupol
Dekapol
Hareketli referans çerçevesindeki parçacığın enine hareketi rölativistik değilse, γ ı=1 ile
Lorentz kuvvet kanunu tarafından hareketli enine eylemsizlik düzlemi içindeki hareket
denklemleri aşağıdaki gibidir;
m 2
d 2x
dt 2
q ( v B ) x
2.8
m 2
d 2z
dt 2
q(v B) z
Burada q ve m test parçacığının sırasıyla yükü ve kütlesidir, t ise laboratuar referans
çerçevesindeki zamandır. Boyuna değişken s=vst ile (2.3) ve (2.8)’de verilen denklemler
aşağıdaki gibi tekrar yazılabilir.
d 2x
ds 2
q
m 2 v s2
(v B) x ,
d 2z
ds 2
34
q
m 2 v s2
(v B) z
2.9
Şekil 2.3. Enine refernas çerçevesinde magnetik n-kutuplarının eşpotansiyel çizgileri. Okların
yönleri özel potansiyel ile ilgili enine magnetik alanın yönünü göstermektedir. Noktalar ise
magnetik potansiyel ve alanların simetri eksenlerini göstermektedir.
Bunlar ideal yörüngeye dik düzlemdeki test parçacığının hareket denklemleridir, ve bağımsız
değişken sinkrotronun ideal yörüngesinin arkının uzunluğudur (s). Şimdi n>0 iken 2.9
denklemini magnetik n-kutupların belirli çeşitleri için ayrı ayrı ele alalım. Dipollerin n=0
olma durumu 2.1.3. te anlatılacaktır.
Kuadropoller için, Tablo 2.1 den v B =Bo(-vsb1x + vsa1z)ex+Bo(vsa1x+vsb1z)ez+Bo(vxb1xvza1x-vxa1z-vzb1z)es’dır. v x v s ve v z v s
olduğundan Bo(vxb1x-vza1x-vxa1z-vzb1z)=0
yaklaşımını yapabiliriz ve kuadropollerin simetri eksenine yakın olan test parçacığının enine
hareket denklemleri aşağıdaki gibidir.
d 2x
ds
2
q b1
q a1
x
z
q
q
35
2.10
d 2z
ds 2
q b1
q a1
z
x
q
q
burada m vs/ q Bo= aldık.
Aynı şekilde, sekstupollerin simetri eksenlerine yakın olan test parçacığının hareket
denklemleri ise;
d 2x
ds
2
q b2
q a2
(x 2 z 2 )
xz
q 2
q
2.11
d 2z
ds
2
q b2
q a2
xz
(x 2 z 2 )
q
q 2
şeklindedir.
2.1.3. Dipoller İçindeki Enine Hareket
Şimdi dipollerin içindeki test parçacığının hareket denklemlerini çıkaralım. Bu durumda,
enine
hareket düzlemi artık laboratuar çerçevesine bağlı eylemsizlik çerçevesi değildir.
Dipollerin bölgesinin içinde ideal yörünge daireseldir ve eğriliğin merkezinin laboratuar
referans çerçevesinin orijininde olması önemli değildir. İdeal yörüngenin eğrilik merkezinde
orijini olan ( X , Y , Z) koordinatlarında yeni bir referans çerçevesi ele alınsın Şekil 2.4. Bu
yapıda, yeni referans çerçevesi laboratuar çerçevesine göre eylemsizdir. Bu yeni eylemsiz
çerçevede, Lorentz eşitlikleri
m
d 2r
dt
2
q ( v B )
Şekil 2.4. Bir sinkrotron düzlemi içerisinde, bir test parçacığının dipoller
içerisindeki hareket denklemlerini belirlemek için kullanılan referans çerçevesi
36
Silindirik koordinatların tanımı, X r Cos , Y r Sin , Z z ,
r (r r 2 )er (2r r )e ze z , şeklindedir. Buan göre Lorentz denklemleri
aşağıdaki gibi yazılabilir.
d r
2
m
dt 2
2
d
mr
q(vB) r
dt
2.12
d r
2
m
dt 2
2
d
mr
q(vB) z
dt
Yaklaşımlar; r d / dt v ve r x ( p s p) / q B0 x p / p s x , burada Δp boyuna
momentum sapması ve ρı ise hızı v olan parçacığın siklotron yarıçapıdır. (2.12.)’deki birinci
denklemaşağıdaki şekli alır.
d 2x
dt 2
2
vs
q
(vB) x
p
m
x
ps
Bağımsız değişken s= vst ile, 1 /( p / p s x) (1 x / p / p s ) / ve er, ex gibi iki
doğrultulu aynı zamanlı olduğundan, son denklem aşağıdaki şekilde basitleştirilir.
2
d x
ds
Tablo
2.1’deki
2
dipollerden,
p
p s
2.13
vB (v s B0 b0 )e x (v s B0 a 0 )e x B0 (v x b0 v z a0 )e s ’yi
elde
x
2
1
q
mv
2
(vB) x
ederiz. v x v s ve v z v s olduğundan B0(vxbo-vza0)=0 yaklaşımı yapılır. Denklem 2.13’e
magnetik kuvvetin değerleri eklendiğinde dipol içinde ve ideal yörüngeye dik düzlemde,
eşzamanlı olmayan test parçacığının hareket denklemleri;
2
d x
ds 2
q
q
p
p
p
1
x
x
1 bo 2 b0
2
q
p s p s
ps
q
2.14
2
d z
ds
2
q a0
q
olur. Burada ρ= m γv/(|q| B0), ps = mγvs dir. 2.6’daki magnetik alanın dipolar alan katsayısı
Bo ile çarpımından ve eş zamanlı parçacığın hareket doğrultusunun yük ve dipol alanın
işaretleri ile uygun olduğundan q bo/ |q| = 1 olduğunu kabul ettik. Bu kabulle bo= 1 olur.
37
B0>0 iken b0=1 saatin ters yönünde dolanan protonlar için ve b0=-1 ise saat yönünde dolanan
elektronlar içindir.
(2.5), (2.10), (2.11) ve (2.14) denklemleri ideal yörüngeye yakın test parçacığının enine
hareketini veren, sinkrotron içindeki enine hareketin kararlılığını analiz eden temel
denklemlerdir. Aşağıdaki kabullerle,
K x ( s) 1 /
( 0)
2
, K x(1) (s) qb1 ( s) / q ,
K x ( s ) qb2 ( s) / q
( 2)
2.15
K z(1) ( s ) qb1 ( s ) / q
K z(0) (s) 0 ,
,
K z( 2) ( s ) qb2 ( s ) / q
bu denklemler aşağıdaki şekilde yazılabilir.
2
d x
ds 2
( 2)
K ( s) 2
p
( 0)
(1)
2
K x ( s) x K x ( s) x x
( x z ) .....
( s) p s
2
2.16
2
d z
ds
2
K z(1) ( s ) z K z( 2) ( s ) xz ....
burada an ≡ 0 (n>0) ile basitleştirdik ve noktalar yüksek magnetik n-kutup terimlerini ifade
etmektedir. n-kutup magnetlerin dağılımı K x( n, z) ( s ) katsayılarının boyuna bağımsız değişken s’e
bağımlılığına dayanır. K x( n, z) ( s ) fonksiyonları s’e göre periyodik adım fonksiyonlarıdır. En
büyük periyod s=Ls dir. Burada Ls sinkrotronun ideal yörüngesinin ark uzunluğudur. Şekil
2.5’de CERN Antiproton akümülatöründeki dipollerin ve kuadropollerin K x(0) ( s) , K x(1) ( s) ve
(1)
K z ( s)
fonksiyonları ile verilen dağılımları gösterilmektedir.
Sinkrotronun tasarım aşamasında analiz denklem 2.16’da sadece dipolar ve kuadropolar
terimler varsayılarak basitleştirilebilinir ve enine hareket denklemleri lineer hale gelir. Bu
analiz ve tasarımı basitleştirir.
38
Şekil 2.5. CERN’deki antiproton akümülatörünün ilk çeyrek ideal yörüngesi
boyunca
dipol
ve
kuadropollerin
dağılımı.
Kx,y(s)
fonksiyonları
Kx(s)=Kx(0)(s)+Kx(1)(s) (yatay dağılım) ve Kz(s)=Kz(1)(s) (dikey dağılım)
şeklinde tanınlanmıştır.
İdeal yörüngenin kararlılığı sonradan lineer otonom olmayan denklem sisteminin kaynağının
kararlılığını özdeştir. Daha yoğun ve daha yüksek enerjili demetlerin, veya sekstupol ile ilgili
terimlerin, lineer olmayan etkilerin varlığı, ideal yörüngenin kararlılığı ile yakından ilgilidir.
Sekstupollerin momentum odaklamasını sağlayan en basit mekanizmalar oldukları gibi, ideal
yörüngenin lineer olmayan kararlılık analizi ise, sinkrotronların performansı için asıl
problemlerden birisidir.
2.2. İdeal Yörünge ve Kararlılığı
Sinkrotronun tasarımındaki ilk adım ideal yörüngeyi tasarlamaktır. Bu yörünge dipollerin ve
doğrusal bölgelerin düzenlenmesiyle tanımlanır. Kuadropoller, sekstupoller, RF boşlukları,
vakum pompaları, çıkarma, deneysel ve enjekte bölgeleri doğrusal bölgelerde yer alırlar.
Burada gelişen bakış açısıyla, buradaki hedef genel koşullar altında ideal yörüngenin
kararlılığını tanımlamaktır, tasarım parametreleri demet tarafından oluşan maksimum enerji
ile toplam sayı, sinkrotron ve doğrusal bölgelerin uzunluğunu oluşturmada kullanılan dipol ve
kuadropollerin güçleri ile tanımlanır. Doğrusal bölgelerin uzunluğu, donanımların boyutlarına
bağlı olarak seçilmelidir. Tasarımın uygulanabilir olması, RF boşlukların magnetlerin
yapılarında seçilen teknoloji ve malzemelere bağlıdır.
Denklem 2.16. ile ideal yörüngenin düzensizliklerinin nasıl hesaplanacağına basit bir örnek
üzerinde bakılırsa, dört dipolü ve dört doğrusal bölgesiyle uzunluğu ds= 2,0 m olan basit bir
39
sinrotron düşünelim. Birimleri normalize etmek için, eş zamanlı parçacığın boyuna hızını
vs=1 şeklinde seçelim, bükülme yarıçapı ρ=1 ve dipol katsayısı b0 = 1 olsun. Şimdilik
momentum sapmasını Δp= 0 alalım. Bu durumda, ideal yörüngeden yatay sapan test parçacık
için, dipollerdeki enine yatay hareket denklemleri xd xd (Denklem 2.14) ve doğrusal
bölgelerdeki xss 0 (Denklem 2.15) dir. Bu denklemlerin çözümleri
x d (s) x d 0 cos(s s 0 ) x d 0 sin(s s 0 )
2.17
x ss (s) x ss0 (s s 0 ) x ss0
burada x d 0 , x ss0 , x d 0 ve x ss0 ideal yörüngenin normali doğrultusundaki enine yatay başlangıç
pozisyonları ve hızlarıdır. Noktalar ideal yörüngenin boyuna parametresi s’e göre türevi
belirtir.
Şekil 2.6.a’da ideal yörüngenin parameterizasyonu gösterilmiştir. İdeal yörüngenin uzunluğu
Ls= (2π+8) m. dir. diğer yandan dipollerin yerleşimi ise s [1,1+π/2], s [3+π/2,3+π],
s [5+π,5+3π/2], s [7+3π/2,7+2π] ve sıfır için K x0 (s) 1 fonksiyonunca belirlenir. Bundan
dolayı enine hareketin kararlılığı için denklem;
x K x(0) (s) x
2.18
Denklem 2.18, x için lineerdir fakat değişken katsayı K x(0) ( s) katsayısına sahiptir. Denklem
2.18’in çözümü, 2.17 çözümlerinin dipolar ve doğrusal bölgeler arasındaki geçiş noktalarında
birleştirilmesiyle elde edilir. İdeal yörüngeden enine olarak sapan parçacığın dinamik
davranışını analiz etmek için ideal yörünge boyunca olan 2.17’nin parametrik çizimine
bakılmalıdır. Şekil 2.6.b’de s=0 ‘da enine yatay doğrultu boyunca başlangıç koşulları
x d 0 0,01 ve x d 0 0 olan parçacığın yörüngesi verilmiştir. Yörüngeden görüldüğü gibi test
parçacığı ideal yörüngeden sapar.
40
Şekil 2.6. Dört dipollü ve dört doğrusal bölgeli basit bir sinkrotron içindeki a)
ideal yörünge, b) düzensiz yörünge. Bu örnekte, doğrusal bölgelerin uzunluğu
ds 2 m, ρ=1 m’dir ve ideal yörünge kararsızdır.
Parçacık paketçikleri için ve parçacıklar arası etkileşme olmadığı durumda paketçiğin enine
boyutları bağımsız değişken s boyunca artan bir genlikle salınır. Eğer sinkrotronun içindeki
süreklilik zamanı büyükse, parçacıklar dipollerin içindeki vakum odasının içine çarparlar ve
demet kaybolur. Bu örnekte, parçacık yörüngesinin ideal yörünge dışındaki başlangıç
koşulları kararlı değilse, görülmelidir ki eğici magnetler arasındaki düz kısımların keyfi
belirlenmesi demette kararsızlığa yol açar.
Genel çözümler (2.17.) matris formunda yazılabilir.
x d ( s) cos(s s 0 )
x d ( s) sin(s s 0 )
sin(s s 0 ) x d 0
x
A( s s 0 ) d 0
cos(s s 0 ) x d 0
x d 0
2.19
ve
x ss ( s) 1
x ss ( s) 0
( s s 0 ) x ss0
x
B( s s 0 ) ss0
1 x ss0
x ss0
2.20
Burada A(s-so) ve B(s-so), hızlandırıcıdaki parçacığın s’deki hızı ve pozisyonu ile s=so’daki
hızı ve pozisyonu ile bağdaştıran transfer matrisleridir. Dipollerin ve doğrusal bölgelerin
uzunlukları sırasıyla π/2 m. ve 2 m. olduğundan makinenin bir turu sonunda, s0=0 ‘da
başlangıç pozisyonu ve hızı x0 ve x 0 olan bir parçacık aşağıdaki şekilde pozisyona ve hıza
sahip olur.
x( L)
= B (1)
x ( L)
x0 1
=
x 0 4
A(π/2) B(2) A(π/2) B(2) A(π/2) B(2) A(π/2) B(1)
41
0 x 0
1 x 0
2.21
n tur sonunda, x(nL) x(( n 1) L) ve x(nL) 4 x(( n 1) L) x(( n 1) L) olur. Fark denklemlerinin
çözümleri x(nL) x0 ve x(nL) 4nx0 x 0 dır. Büyük n için, enine hız artar ve ilk dipol içinde
dairesel yörünge sürüklenir ve parçacık vakum odasına çarpar. Böylece, bu durumda, ds = 2
olduğunda ideal yörünge kararsızdır.
Şimdi doğrusal bölgelerin boyuna ds değişkeni olarak alalım ve dipollerin boyunu π/2’ye
sabitleyelim. 2.19 ve 2.20 denklemlerinden 2.21 denklemi
aşağıdaki şekilde yeniden
yazılabilir.
x( L) 1 2ds 2 ds 4 / 2
3
x ( L) 2ds ds
3
5
2ds 3ds / 2 ds / 4 x0
1 2ds 2 ds 4 / 2 x0
2.22
Kesikli fark denklemi 2.22. ‘nin çözümleri x(nL) c11n c 2 n2 ve x(nL) c3 1n c 4 n2 dir. Burada
λ1,2 (2.22.) ‘deki matrisin öz değerleridir ve ci katsayılar da başlangıç koşulları ile tanımlanır.
[Ar74] Özdeğerler 1,2 1 2ds 2 ds 4 / 2 ds( ds 2 2 ) ds 2 4 / 2 olduğundan |λ1,2|=1
şekline dönüşür ve ds< 2,0 için |Gerçel (λ1,2)| 1,0 olur. Bundan dolayı eğer doğrusal
bölgelerin uzunluğu ds<2,0 olursa, ideal yörünge karalı olur (Şekil 2.7). Bu basit örnek, ideal
yörünge kararlılığının doğrusal bölgelerin uzunluğuna bağlı olduğunu gösterir.
Şekil 2.7. Dört doğrusal bölgeden ve dört dipolden oluşan bir sinkrotron içinde
doğrusal bölgenin uzunluğu ds’nin bir fonksiyonu olarak ideal yörüngenin
kararlılığı. ds<2.0 ise ideal yörünge kararlıdır.
Daha genel bir durumda, dipol bükme açısı =2π/n ve doğrusal bölgelerin uzunluğu ds
olduğunda, makinedeki doğrusal bölge sayısını “n” alırız. M test parçacığının enine yatay
pozisyonu ve hızı ile sinkrotronun önceki turdaki pozisyon ve hızı arasında bağıntı kuran
matris olsun. Bu yapıda
42
M= B(ds/2)(A()B(ds))n-1A ()B(ds/2)
Denklem 2.20 tarafından detB=1, B(ds/2)-1 M B(ds/2)=(A()B(ds))n olduğundan M matrisleri
ve B(ds/2)-1 M B(ds/2) çiftlenimli (konjuge) ve öz değerleri aynıdır. Diğer taraftan eğer {λi}
C matrisinin öz değerlerinin grubu ise, Cn ‘nin özdeğerleri {λin} dir. Yani eğer λ1 ve λ2 A()
B (ds) matrisinin özdeğerleri ise M’nin özdeğerleri λ1n ve λ2n dir. Bu yüzden ideal yörüngenin
kararlılığı A() B(ds) matrisinin özdeğerleri tarafından tanımlanır. Bu koşullar altında ve
dipollerin xd x / 2 eşitliği ile genel çözüm
x d (s) x d 0 cos((s s 0 ) / ) x d 0 sin((s s 0 ) / )
2.23
ve
cos
A( ) B(ds) sin
ds cos sin
ds
cos sin
burada =(s-s0)/ρ dur. A()B(ds) ‘nin özdeğerleri;
1,2 cos
ds
sin
sin
2
2
ds sin 4ds cos 4 sin
2
2
2.24
Daha önce gördüğümüz gibi sinkrotronun ideal yörüngesi eğer |Gerçel λ1,2| < 1 ise yatay
olarak kararlıdır. Böylece 2.24’den
ds
2
2
tan sin
2.25
ve dipolerden ve doğrusal bölgelerden yapılmış basit sikrotronun ideal yörüngesini kararlı
hale sokmak için, 2.25 koşulu sağlanmalıdır (Şekil 2.8).
Boyuna momentum sapması ile durumu analiz etmek için Δp/ps 0 (2.14.) dipoller için olan
denkleme bakarız.
xd x d / 2 p / p s ,
x d s
bunun çözümü ;
p
p
cos x d 0 sin
x d 0
ps
p s
43
2.26
Şekil 2.8.Sinkrotronun kapalı yörüngesinin yatay kararlılığı için doğrusal
kısımların α eğme açısına bağımlılığı.
ve genel hareket denklemi
x K x(0) ( s) x X ( s)
p
p s
2.27
Burada dipol içindeki parçacık için X (s) 1 , diğer durumda X (s) 0 olur. Hareket denklem
çözümlerinin matris formları ise dipoler içinde,
x d ( s) p / p s cos
x d ( s)
sin /
p
/
p
0
s
sin
cos
0
0 x d 0 p / p s
x d 0 p / p s
0
xd 0
x d 0
A
1
p / p s
p
/
p
s
2.28
0 x ss0 p / p s
x ss0 ( s) p / p s
0
x ss0
x ss0
B
1
p / p s
p
/
p
s
2.29
ve doğrusal bölgelerde,
x ss ( s) p / p s 1
x ss ( s)
0
0
p
/
p
s
(s s 0 )
1
0
şeklini alır.
44
Şekil 2.9. Parçacıkların boyuna momentumundaki küçük hatalardan
kaynaklanan ideal yörüngenin dağınımı.
Momentum sapması olduğunda ideal yörüngenin kararlılık analizi için aynı tekniği takip
ederiz. Yukarıda gibi (2.28.) ve (2.29.)’dan,
cos
A( ) B(ds) sin /
0
ds cos sin
cos ds sin /
0
0
0
1
A() B(ds) matrisinin özdeğerleri (2.24.) ile verilen λ1,2 dir ve λ3 =1 dir. böylece eğer
momentum sapması dahil edilirse, ideal yörüngenin kararlılık özellikleri değişmez ve 2.25.
şartı doğruluğunu sürdürür. Bununla beraber, bu durumda eğer Δp/ps 0 ise kapalı yörünge
yeni yatay koordinat x*=ρΔp/ps ile yeniden tanımlanmalıdır ve eski kapalı yörünge etrafındaki
salınımlar daha büyük olabilir ve parçacıklar hızlandırıcının vakum odasına çarparlar.
Şekil 2.9’da ideal yörünge üzerinde başlangıç koşullarında olan parçacığın yörüngesini
Δp/ps=0,02 ve Δp/ps=0,05 olan momentum hataları ile verilmektedir. Açıka görüldüğü gibi
eğer parçacık paketçiğindeki Δp/ps çok fazla artarsa, paketçik kararlı kalır ama salınımların
genliği büyür ve parçacıklar sinkrotronun bakım odasının duvarları karşısında kaybolur.
45
Parçacık paketçiğindeki maksimum momentum hataları üzerine olan bu sınırlama
sinkrotronların tasarımı ile ilgili olarak diğer sınırlamaları ortaya koyar.
2.3. Kuadropol Çiftlerinin Odaklama Özellikleri
Önceki bölümde, parçacıkların ideal yörüngeden küçük yatay sapmalarından dolayı ideal
yörüngenin kararlılık özellikleri analiz edildi. Dikey enine doğrultu boyunca sapmalar için
demet kararsızdır. Bu yüzden demetteki parçacıkları her iki enine doğrultuda karalı hale
sokabilmek için bir odaklama mekanizması tanımlamaya ihtiyaç duyulur.
Hızlandırıcıda, ikisi de normal ama zıt işaretli gradiyentleri olan bir çift kuadropole sahip bir
doğrusal bölgeyi göz önüne alalım. (Şekil 2.10.) birinci kuadropol için qb1/(|q| γρ)=b ve a1=0 ,
ikinci kuadropol için qb1/(|q| γρ)=-b ve a1=0 iken, 2.10 denklemi ile her iki
Şekil 2.10. Bir sinkrotronun doğrusal bölgesindeki
değişken gradyent kuadropol çifti.
kuadropol için hareket denklemleri sırasıyla
d 2 x1
ds
2
bx1
d 2 x2
ds
2
bx2
2.30
d 2 z1
ds
2
bz1
d 2 z2
ds
2
bz 2
denklem 2.30’un çözümleri
x1 ( s) x 01 cos( b ( s s 0 ))
x 01
46
b
sin b ( s s 0 )
z 01
z1 ( s) z 01 cosh( b ( s s 0 ))
x 2 ( s) x 02 cosh( b ( s s 0 ))
z 2 ( s) z 02 cos( b ( s s 0 ))
x 02
b
sinh b ( s s 0 )
b
z 02
sinh b ( s s 0 )
b
sin b ( s s 0 )
2.31
Bir test parçacığının doğrusal bölgenin başlangıç ve bitişi arasındaki enine pozisyon ve
hızlarının (Şekil 2.10.) matris şeklinde ifadesi 2.20 ve 2.31 denklemlerinden kolayca
oluşturulur.
2.31. denkleminden, her kuadropol için transfer matrisleri srasıyla;
cos b dQ
b sin b dQ
A1
0
0
sin b dQ / b
0
cos b dQ
0
0
sinh b dQ / b
cosh b dQ
0
0
cosh b dQ
0
b sinh b dQ
2.32
cosh b dQ
b sinh b dQ
A2
0
0
sinh b dQ / b
0
cosh b dQ
0
0
cos b dQ
0
b sin b dQ
0
sin b dQ / b
cos b dQ
0
Burada dQ=s-s0 kuadropollerin uzunluklarıdır.
Eğer x0 , z 0 , x 0 ve z 0 test parçacığının ilk doğrusal bölgenin başlangıcındaki pozisyonları ve
hızlarıysa, ikinci doğrusal bölgenin sonunda (Şekil 2.10),
x1
x1 B(ds)
z 0
1
z
1
0 B(dl )
A2
B(ds) 0
0 B(ds)
A1
B(dl ) 0
x0
0 x 0
B(ds) z o
z
0
2.33
B(ds)C 2 B(dl )C1 B(ds)
0
x0
x 0
B(ds)C1 B(dl )C 2 B(ds) z 0
z
0
0
Buradaki B matrisi Denklem 2.20’de tanımlanmıştır ve
47
cos b dQ
C1
b sin b dQ
sin b dQ
b
cos b dQ
cosh b dQ
C2
b sinh b dQ
sinh b dQ
b
cosh b dQ
2.34
B(ds)C2B(dl)C1B(ds) ve B(ds)C1B(dl)C2B(ds) matrislerinin özdeğerleri aynıdır ve böylece
değişken gradiyentli kuadropol çiftlerinin dinamik özellikleri yatay ve dikey doğrultuların her
ikisinde de aynıdır. Bundan dolayı bir doğrultuda kararlılığı belirleyen sistemin dinamik
davranışına bakmak yeterlidir.
x
x1
B(ds)C 2 B(dl )C1 B(ds) 0
x1
x 0
2.35
Şekil 2.11. x1 b dQ , x2 dl / dQ , x3 ds / dQ parametrelerinin
fonksiyonu olarak doğrusal bölgedeki değişken gradyent kuadropollerinin
çifti için kararlılık koşulu
|Gerçel(λ1,2)| < 1,0 kararlılık koşuluyla, sistemin fark denklemleri eğer aşağıdaki koşul
sağlanırsa kararlıdır.
|Gerçel(λ1,2)|= |cosh( bdQ ) (cos( bdQ )- (dl/2+ds) b sin( bdQ )
+ sinh ( bdQ ) ((dl/2+ds) b cos( bdQ )-b dl ds sin ( bdQ )) | <1
2.36
Yeni değişkenler x1= bdQ , x2=dl/dQ ve x3= ds/dQ ile, 2.36. koşulu aşağıdaki gibi yazılabilir.
48
|cosh(x1)(cos(x1)-(x1x2/2+x3) sin (x1))
+ sinh(x1) ((x1x2/2+x3) cos (x1)-x12 x2 x3 sin (x1)) | <1
2.37
x1=0 etrafındaki Taylor serilerinde 2.37. ‘yi geliştirirken |1-2x13 x3/3- ...| <1 ‘i elde ederiz ve
küçük x1 =
b dQ için, (2.36.) dQ, b, ds, ve dl gibi bütün parametreler için çözüme sahiptir.
Bu koşullar altında, enine doğrultular boyunca sapan parçacıkları kararlı hale sokan değişken
gradiyentli kuadropol çiftleri için parametre değerlerini seçmek mümkündür. Şekil 2.11. ‘de
2.37. kararlılık koşulu (x1, x2, x3) uzayında gösterilmiştir.
Değişken gradiyent kuadropllerini geçen parçacık demetlerinin dinamik davranışlarının
analizi için, dQ=1, ds=1,0, b=0,5 ve dl=1,0 parametreleri alınır. 2.36’dan |Gerçel (λ1,2)|
=0,39<1 dir.
Şekil 2.12. Değişken gradyent kuadropol çiftinin kuvvetli odaklama özellikleri.
Kuadropollerin konumları referansa göre seçilmiş ve (2.32)’deki A1 ve A2
transfer matrislerine karşı gelmektedir. A1 kuadropolü yatay olarak odaklar ve
dikey olarak ayırır. A2 kuadropolü ise yatay olarak ayırır ve dikey olarak
odaklar.
Şekil 2.12’de ideal yörüngede merkezlenmiş bir daire boyunca dağılmış ve başlangıç hızları
x 0 z 0 0 olan bir grup eş zamanlı olmayan parçacığın yörüngeleri gösterilmiştir. Birinci
yatay odaklama kuadropolünü geçişten sonra (Şekil 2.10’daki A1) parçacıklar dikey olarak
dağılırlar. İkinci kuadropolde (A2), dikey olarak odaklanıp, yatay olarak dağılırlar.
49
Kesim 1.6.3’de gösterildiği gibi, kuadropolleri olmayan ideal sinkrotronlarda, test
parçacığının dikey hareketi daima kararsızdır. Yani değişken gradiyent kuadropol çiftlerinin
tanımlanmasının bir etkiside demette dikey salınımlardan kaynaklanan dikey hareketi kararlı
hale getirmektir. Diğer taraftan değişken kuadropol çiftleri, örneğin deney alanlarının
bulunduğu uzun doğrusal bölgelerindeki yatay düzlem yer değiştirmelerinin kararlılığını
sağlamak için kullanılır. Sinkrotron tasarım terminolojisinde bu bölgelere “magnet ekleme
yerleri” denir [Bri87].
50