Mühendislik Mimarlık Fakültesi
Prof. Dr. Zeynep (Hiçşaşmaz) Katnaş
Gıda Mühendisliği Bölümü
09.04.2015
GIDA MÜHENDİSLİĞİNDE GEÇİŞİM OLGULARI
ÖDEV VI
1.
2.
3.
4.
Tabakalı akış ve kargaşalı akış problemlerinin çözüm yollarını karşılaştırarak
faklarını irdeleyiniz.
Sizce akışta kargaşalılık neden incelenmesi zor bir konudur?
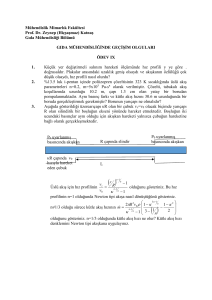
3
yv
yv
Çeperdeki kargaşa özlülüğünü veren
0 5 denkleminin
14.5
3
vx
yv 1 yv 1 yv
yv
... 0 5 denkleminin
1
v
2 v B 4 14.5
dğrudan Taylor dizini açılımından elde edildiğini irdeleyiniz.
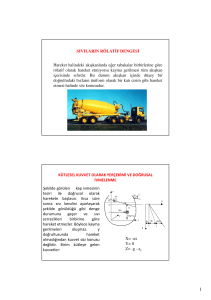
Aşağıda gösterildiği üzere bir disk sabit açısal hız Ω ile dönmektedir. Diskin
merkezinin tam üstüne küresel bir cisim kütlesi göz ardı edilebilir düzeyde L
uzunluğunda bir çubuk kullanılarak asılmıştır. Diskin dönmesi nedeniyle küresel
cisim merkezkaç kuvvetinden etkilenmekte ve bağlı olduğu çubuk dikey düzlemle
θ kadar bir açı yapmaktadır. Küresel cismin üzerinde kuvvet denkliği kurarak
g
cos 2 olduğunu gösteriniz. Ω=0 olduğunda cosθ ne olur?
L
t
Ω nın θ yı sıfırlayan bir sınır değeri Ωsınır olduğunu gösteriniz. Sınır değerinin
üstüne çıkıldığında θ nın olası iki tane değeri olduğunu gösteriniz. θ ya karşı Ω yı
çizerek bu olguyu açıklayınız. Oluşan eğrileri kararlı ve kararsız olarak
işaretleyiniz.
Bu işlemlerin yatışkın koşullarda gerçekleştiğini göz önüne alınız. Aslında kütlesi
m
olan
küresel
cisim
için
hareket
denkleminin
2
d
mL 2 m 2 L sin cos mg sin olduğunu gösteriniz. Sonra bu denklemin
dt
g
yatışkın koşullarda cos 2 denklemine dönüştüğünü gösteriniz. Sonra bu
L
denklemi kararlılık analizi yapmak için kullanınız. Şöyle ki; 0 1 olsun ve
θ0 yatışkın koşullara (süreden bağımsız) θ1 ise yatışkın olamayan (sürenin
fonksiyonu) karşılık gelsin.
Daha önce çizdiğiniz θ ya karşı Ω grafiğinin θ0=0 olan alt dalını göz önüne alınız.
Bu durumda sin sin 1 1 ve cos cos 1 1 olur ve hareket denklemi
d 21 2 g
1 denklemine dönüşür. Şimdi 1 A e it olduğunda
L
dt 2
g
i 2 olarak bulunuz. Şimdi 2 g L olduğunda hem ω+ hem de ωL
nin gerçek sayı olduğunda θ1 in salınacağını ve bu durumda sistemin kararlı
olduğunu gösteriniz. Sonra 2 g
olduğunda hem ω+ pozitif karmaşık sayı
L
olduğundan e it nin süreye göre sürekli artacağını ve sistemin çok küçük açısal
hızlarda bile kararsızlaşacağını gösteriniz.
Sonra daha önce çizdiğiniz θ ya karşı Ω grafiğinin üst dalını göz önüne alınız.
Aynı analizi üst dalda gerçekleştiriniz. θ1 için denklemi kurduktan sonra
doğrusallaştırmak için kareli terimleri göz önüne almayınız. Yine 1 A e it
çözümünü deneyiniz. Üst dal çözümlerinin “”””””””””””kararlı olduğunu
gösteriniz.