İTÜ Elektrik-Elektronik Fakültesi
Elektronik Mühendisliği
Devre ve Sistem Analizi Dersi
Proje Çalışması
Projenin Adı:
Bir Devrenin Durum Denklemlerinin Çözümü İle
Sürekli
Sinüzoidal
Haldeki
Çözümünün
Karşılaştırılması
Projenin Amacı:
Sürekli Sinüzoidal Hal’de elde edilen çözüm ile tam
çözümün arasındaki farkın belirlenmesi
Öğretim Görevlileri:
Yrd. Doç. Dr. Neslihan Serap Şengör
Müh. Özkan Karabacak
Hazırlayanlar:
Sadık Sayim
Oğuz Yelbey
Ali Pala
Mustafa Dursun
1
BİR DEVRENİN DURUM DENKLEMLERİNİN ÇÖZÜMÜ İLE SÜREKLİ
SİNÜZOİDAL HALDEKİ ÇÖZÜMÜNÜN KARŞILAŞTIRILMASI
Amaç: Sürekli Sinüzoidal Hal’de elde edilen çözüm ile tam çözümün arasındaki farkın
belirlenmesi
Giriş: Bir elektrik devresi için elde edilen durum denklemlerindeki durum
değişkenlerinin sayısına o devrenin karmaşıklık mertebesi adı verilir. Durum
değişkenleri ise seçilen ağaç yapısına göre dallardaki kondansatörlerin gerilimleri
ile kirişlerdeki endüktansların akımlarıdır. n. mertebeden bir devrenin durum
denklemlerinin genel yapısı, aşağıdaki diferansiyel denklem sistemi gibidir.
x1 (t )
d x2 (t )
dt
xn (t )
Burada
x1 (t )
x (t )
d
2
x(t ) Ax(t ) Bu(t )
A
Bu(t )
dt
xn (t )
(1.1)
x1 (t ) , x2 (t ) ….… xn (t ) terimleri dal kapasite gerilimleri ve kiriş endüktans
akımlarıdır. A ve B matrislerinin elemanları devredeki direnç, kapasite ve endüktans
gibi elemanların değerlerinin fonksiyonlarıdır. u(t ) vektörü ise kaynaklara ilişkin
değerleri içerir.
Durum denklemlerinin çözümleri incelenirken, çözüm ifadelerinde iki ayrı
terim bulunmaktadır. Bunlardan ilki, devrede kaynaklar yokken, kapasitelerin ilk
gerilimleri ve endüktansların ilk akımları nedeniyle ortaya çıkan, devrenin “öz
çözümü”dür. İkinci terim ise, devrede bulunan kaynaklar nedeniyle elde edilen,
devrenin “zorlanmış çözümü”dür. “Tam çözüm” öz ve zorlanmış çözümün
toplamıdır.
x tam (t ) x öz (t ) x zorlanmi ş (t )
(1.2)
Elde edilen diferansiyel denklem sisteminin çözümü şu şeklindedir.
x(t ) (t )x(0) [xö (t ) (t )xö (0)]
Bu çözümde
özel çözüm
(1.3)
t için (t ) 0 oluyorsa, öz çözüm sıfıra, zorlanmış çözüm de
x ö (t ) ’ye uzanmaktadır. Bu özelliğe sahip olan devrelere asimptotik
kararlı devreler adı verilir. Asimptotik olarak kararlı bir devrenin öz çözümü
xh (t ) geçici çözüm; özel çözümü x ö (t ) sürekli çözüm adını almaktadır.
Sürekli Sinüzoidal Hal: Lineer zamanla değişmeyen ve asimptotik kararlı olan
devreler, herhangi bir başlangıç durumu için bağımsız
2
frekanslı sinüzoidal
kaynaklar ile uyarıldıklarında, devredeki elemanların akım ve gerilimleri
üstel olarak
t için
frekanslı sinüzoidal dalga şeklini alırlar. Bu duruma sürekli sinüzoidal
hal denir. Sürekli sinüzoidal halde çalışan devredeki akım ve gerilimler başlangıç
koşullarından bağımsızdır.
Sürekli
Sinüzoidal
Hal’de
çözüm
yöntemi
mühendislikte
yaygın
olarak
kullanılmaktadır. Bunun nedenleri, birçok devrenin Sürekli Sinüzoidal Hal’de çalışması
ve yöntemin sadece elektrik devrelerinin çözümünde değil; kontrol sistemleri,
kuantum elektroniği ve elektromanyetik gibi diğer alanlarda da kullanılmasıdır.
Sürekli Sinüzoidal Hal’de çözüm, elektrik devrelerindeki değişken gerilim ve
akım değerlerinin; uygun genliği, frekansı ve fazı olan sinüzoidal bileşenlerin toplamı
olarak ifade edilmesi fikrine dayanır.
Durum Denklemleri’nin Analitik Olarak Çözümü
Lineer zamanla değişmeyen elektrik devrelerinin durum denklemlerinin elde
edilmesi zaman tanım bölgesinde yapılır. İçinde lineer elemanlar bulunan devrelerin
çözümünde, belirli yöntemlerin izlenmesiyle devre denklemleri birinci mertebeden
diferansiyel denklem sistemi biçiminde yazılabilir. Bu denklem sistemine devrenin
durum denklemleri ve içindeki bilinmeyen büyüklüklere durum değişkenleri denir.
Durum denklemlerinin elde edilmesinde en önemli husus denklem kurma ağacının
uygun seçilmesidir. Buna göre denklem kurma ağacı;
— Gerilim kaynaklarına ilişkin bütün graf elemanlarını içermeli,
— Kapasitelere ilişkin en çok sayıda graf elemanını içermeli,
— Endüktanslara ilişkin en az sayıda graf elemanını içermeli,
— Akım kaynaklarına ilişkin hiçbir graf elemanını içermemelidir.
Uygun olarak seçilen denklem kurma ağacı ile kurulan n. mertebeden devrelere
ilişkin durum denklemleri genel halde
d
x(t ) Ax(t ) Bu(t )
dt
biçimindedir. Burada
(1.4)
x(t ) vektörü içinde durum değişkenleri olarak kapasite
gerilimleri ve endüktans akımları vardır. Eğer devrede kaynak yoksa (1.4) denklemi
homojen denklem denilen
d
x(t ) Ax(t )
dt
şeklini alır. Homojen denklemin
(1.5)
[t 0 , t ) aralığındaki çözümü xh (t ) ile gösterilirse,
devrede kaynak olmadığından bu çözüm devredeki durum değişkenlerinin genel
olarak sıfırdan farklı olduğu varsayılan başlangıç anındaki değerlerin nedeniyle
3
ortaya çıkar. Daha açıkçası, homojen denklemin çözümü devrenin kendine özgü
davranışını belirler. (1.5) ifadesinde iki tarafında entegrali alınırsa denklemin
çözümünün
xh (t ) = e At C
(1.6)
biçiminde olduğu görülür. Burada C vektörü entegrasyon sabitlerinden oluşmaktadır.
Eğer çözüm [0,t) aralığında aranıyorsa, çözümün tek olarak belirlenebilmesi için
xh (t ) ’nin t 0 başlangıç anındaki xh (t ) x0 değerinin de verilmiş olması gerekir.
x0 değerine başlangıç değeri ya da ilk koşul denir. Çözümün bu ilk koşulu sağlaması
gerektiğinden,
x h (0) x 0 e A0C C
(1.7)
bağıntısından C= x0 olduğu görülür. Sonuçta (1.5) homojen denkleminin çözümü
x h (t ) e At x0
biçimini alır. Bulunan
(1.8)
xh (t ) fonksiyonuna devrenin öz çözümü denir. Bundan sonra
genel çözümün bulunabilmesi için parametrelerin değişimi yöntemi kullanılabilir. Bu
yöntemde (1.6) ile verilmiş çözüm ifadesindeki sabit katsayılardan oluştuğunu
varsaydığımız C vektörünün, zamana bağlı bir fonksiyon olduğu varsayılır. Bu
durumda
x h (t ) e At C (t ) fonksiyonu (1.4) denkleminde yerine konulursa
e At [
d
C (t )] Ae At C (t ) Ae At C (t ) Bu(t )
dt
d
C (t ) Be At u(t )
dt
t
C (t ) e A Bu( )d C (0)
(1.9)
0
ifadesi elde edilir. Bulunan (1.9) ve (1.7) ifadeleri denklemde yerine konulursa
diferansiyel denklemin ilk koşulu da sağlayan çözümü aşağıdaki biçimde elde edilir.
t
x(t ) e At x(0) e A(t ) Bu( )d ,
x(0) x 0
(1.10)
0
Bu ifadede ilk terim, homojen kısmın ilk koşulu da sağlayan çözümü (öz çözüm) olur.
Devredeki kaynak fonksiyonu nedeniyle ortaya çıkan ikinci terim ise devrenin
zorlanmış çözümü adını alır.
4
Başka bir yöntemle bu diferansiyel denklem takımı şu şekilde de çözülebilir.
Homojen kısmın çözümü ile diferansiyel denklemin bir
xö (t ) özel çözümünün toplamı
tam çözümü vermektedir.
x tam (t ) xh (t ) xö (t ) x tam (0) xh (0) xö (0) ,
xh (0) C
ifadelerinden
C x0 xö (0) elde edilir. Bu durumda
x tam (t ) x h (t ) x ö (t ) Ce At x ö (t ) [x 0 x ö (0)]e At x ö (t )
x tam (t ) x 0 e At x ö (t ) x ö (0)e At
(1.11)
ifadesi elde edilir. Burada ilk terim öz çözüm; ikinci terim zorlanmış çözümdür. Lineer
zamanla değişmeyen devrelerde e
At
matrisi (t ) durum geçiş matrisine karşı düşer.
e At matrisinin özdeğerlerinin değerlerine göre devre kararlı, asimptotik kararlı veya
karasızdır.
t durumunda
xö (t )
xkalıcı (t ) xö (t ) K1cos( w1t ) K 2sin( w1t )
, i 0
devre asimptotik kararlı
, i 0
devre kararlı
, i 0
devre kararsız olur.
Durum Denklemlerinin Sürekli Sinüzoidal Haldeki Çözümü
Durum denklemleri (1.1) ifadesiyle verilmiş bulunan bir devrede bütün akım
ve gerilim kaynaklarının aynı frekanslı sinüzoidal fonksiyonlar olduklarını varsayalım.
Bu nedenle devredeki herhangi bir akım veya gerilim kaynağı zamanın fonksiyonu
olarak,
ik (t ) 2 I k cos( wt k )
v r (t ) 2Vr cos( wt r )
(1.12)
biçiminde değiştirilebilir. Bu ifadelerde
gerilim kaynağının efektif değerini
k
I k ve E r sırasıyla k. akım kaynağının ve r.
ve
r
de, sırasıyla yine bu kaynakların, belirli
bir referansa göre sahip oldukları faz açılarını göstermektedir. Durum denklemlerinin
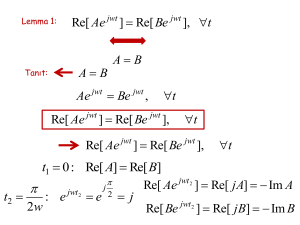
genel ifadesi (1.1)’deki gibidir. Sinüzoidal bir akım ya da gerilim fonksiyonunun genel
ifadesi,
r (t ) 2 R cos( wt ) olduğundan Euler formülleri yardımıyla bu fonksiyon,
r (t )
2
2
R[e j ( wt ) e j ( wt ) ] =
Re j
2
2
5
jwt 2
jw
e
2 Re
jwt
e
(1.13)
biçiminde
r(t)= e
jwt
yazılabilir.
Burada
2
Re j
2
yazılırsa
ifade
e jwt =f(t)+ f (t) şeklini alır. Bu ifadede f(t)=ρ.e jwt kompleks değerli ve
t’ye bağlı bir fonksiyondur.
u1 (t ) 2U 1 cos( wt 1 )
u (t )
2
U
cos(
wt
)
2
2
2
U (t )
u k (t ) 2U k cos( wt k )
(1.14)
şeklindeki U (t ) kaynak vektörü aşağıdaki şekilde yazılabilir.
a1
a1
a
_
2 jwt a 2 jwt
U (t )
e
e
ae jwt a e jwt
a k
a k
(1.15)
Bu durumda özel çözüm;
x1 (t ) 2 X 1 cos( wt 1 )
x (t )
2 2 X 2 cos( wt 2 )
x(t )
x k (t ) 2 X k cos( wt k )
şeklinde alınabilir. Durum vektörünün ifadesi
(1.16)
cp
2X p
2
e
c1
c1
c
2 jwt c 2 jwt
x(t )
e
e
ce jwt ce jwt
c k
c k
biçiminde olur. Bu ifadenin zamana göre türevi alınarak
bağıntısı elde edilir. Yukarıdaki bağıntılardan faydalanarak;
6
j p
şeklinde yazılırsa;
(1.17)
d
x(t ) e jwt jwe jwt
dt
jwce jwt jwce jwt A(ce jwt ce jwt ) B(ae jwt ae jwt )
[( jwI A)c Ba]e jwt [( jwI A)c Ba]e jwt 0
(1.18)
şeklini alır. Bağıntıda bilinmeyen c vektörüdür ve bütün t değerlerinde geçerli olması
için gerek ve yeter koşul ( jwI A)c Ba 0 ve ( jwI A)c Ba 0 şartlarının
sağlanmasıdır.
Wq Wq e
j q
Böylece
c
vektörü,
c ( jwI A) 1 Ba
X p X pe
olur.
j p
ve
yerlerine konursa, elemanları fazör büyüklükleri olan,
X 1 X 1e j 1
X
j 2
2 X 2e
X
j n
X n X n e
U 1 U 1e j1
U
U 2 e j 2
2
U
j n
U k U k e
(1.19)
sütun matrisleri elde edilir. Sütun matrislerinin yerlerine konulmasıyla,
X ( jwI A) 1 BU
(1.20)
denklemi elde edilir. Bu ifadenin,
t tanım bölgesine geçildiğinde, özel çözüme eşit
olduğu görülür.
Asimptotik Kararlılık Koşulu ve Rezonans
Lineer zamanla değişmeyen bir elektrik devresinin herhangi bir elemanının
akım veya gerilim ifadesi, çeşitli yöntemlerle elde edilebilir. Durum değişkenleri dal
kapasitelerinin gerilimleri ve kiriş endüktanslarının akımlarıdır.
t tanım bölgesinde
izlenilecek olan diferansiyel denklem çözüm yönteminde, devrenin özdeğerlerine
bağlı olarak birden fazla genel çözüm ifadesi elde edileceğinden
s tanım bölgesine
geçilecektir. Bu ifadenin Laplace Dönüşümü alınıp x(s ) yerine (1.10) ifadesindeki
çözüm konulursa ve
L1 (t ) ( sI A) 1 alınırsa;
x(s ) ( sI A) 1[ Bu ( s) x(0)]
ifadesi elde edilir. Ayrıca
matrisinin
indirgenmiş
(1.21)
( sI A) 1 ’nın ifadesi
ek
matrisidir.
7
K (s)
şeklinde olup, K (s ) ; ( sI A)
M (s)
M (s )
ise
genel
halde
M (s) (s 1 ) k1 ( s 2 ) k 2 ( s m ) km
biçimindedir
ve
i
(i=1,2,….m)ler
A
matrisinin özdeğerleridir. Sonuçta (1.19) ifadesi
x( s )
K (s)
Bu (s) x(0)
M ( s)
(1.22)
olarak yazılabilir. Bu bağıntıda, parantez içindeki matrisin bütün elemanları s’nin
çokterimlileri biçimindedir. Demek ki, durum değişkenlerinin genel ifadesi
I ( s ) P( s )
P( s )
V ( s) Q( s) M ( s)U p ( s)
biçiminde
verilebilir.
Buradaki
U p (s )
(1.23)
çokterimlisi,
u( s )
kaynak
vektöründeki
elemanların paydaları nedeniyle ortaya çıkmaktadır. A, B, C, D katsayılar matrisleri
reel olduklarından,
P(s) Q(s) rasyonel fonksiyonu reel katsayılıdır. ( sI A) 1
matrisi kutuplarına ilişkin rezidü matrislerinin toplamı olarak yazılırsa, Ri , j (i=1, 2,
... , m; j=1, 2, ... k) matrisleri sağdan B matrisiyle çarpılarak ve ayrıca bu ifadeye D
sabit matrisini ekleyerek, denklemler aşağıdaki gibi elde edilir.
m k1
Ri, l
x( s )
l
i 1 l 1 ( s i )
[ Bu( s) x(0)]
(1.24)
Bu ifade şu şekilde tekrar düzenlenebilir. u (s ) kaynak vektörü nedeniyle ortaya çıkan
U p (s ) polinomunun özellikleri bellidir. Devreyi uyaran kaynaklara ilişkin fonksiyonlar
sınırlı türdendir. Bu nedenle bunların Laplace Dönüşümleri genellikle U z ( s ) U p ( s )
biçiminde olup
U z (s) ’nin derecesi U p (s) ’ninkinden küçüktür. Örneğin, kaynak
fonksiyonları arasında
bulunuyorsa, U p (s )
sırasıyla 0, a ve
u( t ) sabit , u( t ) e at , u( t) A cos( wt ) fonksiyonları
de
s , ( s a ) , ( s 2 w 2 ) çarpanları bulunacaktır. i ’lerin
jw ’dan farklı olmaları halinde, (1.22) ifadesi basit kesirlere
ayrılarak;
m k1
1
x( s)
(s )l
i 1l 1
i
haline getirilebilir. Burada
ve
Ri, l x(0)
U p ( s)
1, 2 ,, m ’ler, M (s )
(1.25)
minimum çokterimlisinin sıfırları
k1, k 2 ,, k m ’ler de bunların katlılıklarıdır. Devrede ilgilenilen akım ya da gerilimin
zaman tanım bölgesindeki ifadeleri Ters Laplace Dönüşümü alınarak bulunabilir.
8
m k1
m k 1 Ri, l
i( t )
x(0)
1
1
x(t )
L
L
i 1l 1 ( s i ) l U p ( s)
i 1l 1 ( s i ) l
v(t )
(1.26)
Burada ikinci terim kaynaklardan dolayı oluştuğundan, x(t ) ’ye kaynak fonksiyonları
cinsinden terimler getirir. İlk terim ise, devrenin yapısı nedeniyle ortaya çıktığından
bunun i (t ) ve v (t ) ’ye olan katkısı incelenmelidir. Dönüşümler yapılırsa ilk terim
aşağıdaki gibi olur.
m k1 Ri, l m k1 Ri, l
L
t l 1e i t
l
(
l
1
)!
i 1l 1 ( s i ) i 1l 1
1
Sonuçta
(1.27)
i (t ) ve v (t ) ’nin ifadelerinde t l 1ei t biçimindeki fonksiyonların lineer
kombinezonu yer alacaktır. Görüldüğü gibi,
fonksiyondur. e
i t
fonksiyonunun genliği de
l 1 ise, t l 1 zamanla artan bir
i ’ye
bağlıdır.
i i jwi
biçiminde
olduğundan,
e i t e i t e jw i t e i t (cos wi t j sin wi t )
yazılabilir. e
jw i t
(1.28)
t
’nin modülü 1'e eşit olduğundan zamanla değişmez. e i , reel ve
pozitif bir fonksiyon olduğundan, davranışı,
t için i 'nin değerine göre ortaya
çıkar.
a.
i 0
durumu
e i t ’nin modülü zamanla artacağından i (t ) ve v (t ) ’nin genlikleri zamanla
sınırsız olarak artacaktır. Bu fiziksel durumu belirlemek üzere, bu tür davranışı
gösteren devrelere kararsız devreler adı verilir.
çokterimlisinin
i
i 0
durumu, M (s ) minimum
sıfırının kompleks düzlemin sağ yarısında olduğunu ifade eder. Yani
M (s ) çokterimlisinin kompleks düzlemin sağ yarısında sıfırları varsa, ilgilenilen devre
kararsız bir devredir.
b.
i 0
i
durumu
sanal eksen üzerindedir. Bu durumda e
i t
’nin modülü t den bağımsız olup,
1'e eşittir. i (t ) ve v (t ) ’nin modüllerinin zamanla artıp artmaması artık
bağlıdır. Eğer
l tam sayısına
l 1 ise genlikler zamanla artar ve devrenin kararsız olduğu
söylenebilir. Devrenin kararlı olması için
0 l 1 koşulu sağlanmalıdır. Bunun
anlamı, ya sanal eksen üzerinde M (s ) ’nin sıfırı yoktur ya da varsa bu sıfır basit bir
9
sıfırdır. M (s ) ’nin sanal eksen üzerinde basit sıfırlarının olması halinde fonksiyonunun
genliği zamanla sıfıra gitmeyeceğinden,
devre kararlı olmakla birlikte artık
asimptotik olarak kararlı değildir. Çözümde kaynakların etkisinin yanı sıra başka
sinüzoidal bileşenler de gelecektir. Dolayısıyla
c.
i 0
t için öz çözüme ulaşılamaz.
durumu
i i
Bu durumda
kuvvet serisine açınımı göz önüne alınırsa, t
t l 1e i t
e i t 1 e
yazılabileceğinden,
l 1 i t
e
i t
olur.
’nin
(1.29)
1
1
2
l
1 i t i t2 i tl
2!
l!
l 1
ile bölünür ve
alınırsa, bu limitin sıfır olduğu görülür. Demek ki
fonksiyonlarının modülleri sonlu olup,
i t
fonksiyonu,
t l 1e jw i t
biçiminde yazılabilir. Bu ifadenin payı ve paydası t
e
i 0
t için limiti
halinde i (t ) ve v (t )
t için sıfır değerine erişirler. Dolayısıyla,
devredeki akım ve gerilimlerin genlikleri sonludur ve
t için hepsi sıfıra
yaklaşırlar. Bu davranışı gösteren devrelere asimptotik olarak kararlı devreler adı
verilir. Asimptotik kararlı devrelerde geçici ve sürekli çözüm bulunur. Başka bir
deyişle, M (s ) çokterimlisinin sıfırlarının tümü, katlılıkları ne olursa olsun, kompleks
s-düzleminin sol yarısında bulunuyorsa, buna ilişkin devre asimptotik olarak kararlı
bir devredir.
Özetlemek
gerekirse
i (t )
veya
v (t ) ’nin
sonlu
genlikte
olmaları,
Q( s ) M ( s )U p ( s ) çokterimlisinin sıfırlarının kompleks düzlemdeki konumlarına
bağlıdır. Yukarıda değinildiği üzere, kaynak fonksiyonları genellikle sonlu değişimler
gösteren
sinüzoidal,
basamak
fonksiyonu,
üstel
fonksiyonlar
v.b.
türünden
olduklarında U p (s ) ’nin sağ yarı-düzlemde sıfırları söz konusu olmaz ve devrenin
kararlılığını
M (s ) çokterimlisi belirler. Bu nedenle, M (s ) ’nin sıfırları olan i
kompleks sayılarına, M (s ) ’nin ilişkin olduğu devrenin öz frekansları adı verilir.
Devrede kaynaklar yokken u ( s ) 0 olacağından
x( s) ( sI A) 1 x(0)
K ( s)
x(0)
M ( s)
(1.30)
ifadesi elde edilir. Bu ifade de herhangi bir akım veya gerilimin, bir reel rasyonel
fonksiyonla belirlenebileceğini gösterir. Görüldüğü gibi içinde kaynaklar bulunmayan,
10
ancak ilk koşullar nedeniyle davranış gösteren bir devredeki akım ve gerilimlerin
biçimleri, sadece M (s ) çokterimlisinin sıfırlarına bağlıdır. Bu nedenle, M (s ) ’nin
i
ile
gösterilen sıfırlarına devrenin öz frekansları denilmektedir. Öte yandan, yukarda
görüldüğü üzere, M (s ) çokterimlisi,
çarpanı olup,
i ’ler
D(s) sI A karakteristik çokterimlisinin bir
A matrisinin öz değerleridir. Bazı durumlarda kaynaklara ilişkin
U p (s ) çokterimlisinin sıfırları, devreye ilişkin
(devrenin öz frekansıyla) çakışabilir.
i
M (s )
çokterimlisinin
sol yarı-düzlemde olduğunda,
katlılığından bağımsız olarak, devre asimptotik kararlıdır. Ancak
üzerinde ise, M (s ) ’nin
i
i
sıfırlarıyla
i
i ’nin
sanal eksen
de basit bir sıfırı olmasına rağmen, Q( s ) M ( s )U p ( s ) ’nin
de iki katlı bir sıfırı olur ve devre kararsız duruma girer. Bu özel halde, daha
açıkçası, sanal eksen üzerinde öz frekansı bulunan bir devrede kaynaklardan
bazılarının bu öz frekansa sahip sinüzoidal fonksiyonlar olmaları halinde, devredeki
bazı akım ve gerilimlerin genlikleri zamanla sınırsız olarak artacaktır. Bu olay,
devrenin rezonans durumuna gelmiş olması biçiminde yorumlanır.
Rezonans: Elektrik biliminde 19. yüzyılın son çeyreğinde Nikola Tesla; AC akımı
pratikte anlamlı kılmasından sonra yaptığı deneylerde, çalıştığı devrelerin farklı
frekans değerlerinde farklı direnç gösterdiğini ve bir frekans değerinde direncin
minimum olduğunu görmüştür. Daha sonra elektromanyetik enerji yayınımını
toprağın minimum direnç gösterdiği frekans değerinde oluşturduğunda, çok güçlü
yerel depremler meydana getirmeyi başarmıştır. Rezonans temel anlamda devrenin
sanal direncinin sıfır olduğu frekans değeridir. Bunu pratikte bir salıncak örneği ile
açıklayabiliriz. Bir salıncağın itildiğini düşünelim. Eğer salıncağın ve iten kişinin
frekansı ve fazı aynı olursa, malzemenin direnci durumunda bir direnç kalmayacak ve
iten
kişinin
bu
direnci
aşan
sağlayacaktır. Örneğin Boğaz
her
kuvveti,
Köprüsü’nün
salıncağın
rezonans
daha
da
yükselmesini
frekansında, bir titreşim
yayarsak, malzemenin sabit iç direncinin dışında, kuvvet tamamen köprünün
malzemesini
bozulmaya
zorlayacak,
bu
biriktikçe
bir
noktadan
sonra
köprü
çökecektir. Tesla’nın Tesla Makinesi ile yaptığı depremlerin teorisi de bundan
ibarettir.
Dolayısı ile rezonans frekansı malzeme kavramının olduğu her bilim ve
uygulamada karşımıza çıkmaktadır.
11
Örnek Alınan Devrenin Analitik Olarak Çözülmesi
Devrede e(t ) E cos( wt ) olarak verilmiştir.
İlk olarak uygun ağaç yapısı seçilmelidir. Bu durumda uygun ağaç gerilim kaynağını
ve kondansatörü içerecek biçimde seçilebilir. Buradan durum denklemleri aşağıdaki
gibi elde edilir.
1
d vC (t ) RC
dt iL (t ) 1
L
1
1
C vC (t ) E cos( wt )
R
0 iL (t ) 0
Devre üzerindeki değerler yerlerine konulursa;
d
dt
vC (t ) 2 1 vC (t ) 2
E cos( wt ) elde edilir.
i (t ) 1
0 iL (t ) 0
L
Devrenin Öz Çözümü
Karakteristik denklem
I A
2 1
2 2 1 ( 1) 2 0
1
olarak bulunur. Buradan özdeğerler çözülürse
1 2 1
bulunur. Özdeğerler
sıfırdan küçük olduğuna göre devre asimptotik kararlıdır. Homojen kısmın çözümü
vC (t ) ( A1 B1t )e t
x h (t )
t
i L (t ) ( A2 B2 t )e
biçimindedir. Bu çözüm homojen denklemi sağlayacağından
B2 A2 ( A1 B1 )
olmalıdır. Buna göre,
vC (t )
vC (0)
xh (t )
M (t )
i L (t )
i L (0)
elde edilir. Burada
1 t t
1
M (t )
’dir. Ayrıca M (0) I M (0) olduğundan,
t
1
t
(t ) durum geçiş matrisine eşittir. Bu yüzden öz çözüm
12
vC (t )
1 t t vC (0)
x h (t )
e t
i L (t )
t 1 t i L (0)
olur.
t için (t ) 0 olduğundan, devre asimptotik olarak kararlıdır ve öz
çözüm devrenin geçici çözümüdür.
Devrenin Özel ve Zorlanmış Çözümleri
Gerilim kaynağına ilişkin fonksiyon
e(t ) E cos( wt ) olarak verildiğinden
kapasite geriliminin ve endüktans akımının özel çözümleri de genlikleri ve faz açıları
farklı sinüzoidal fonksiyonlar biçimindedir. Demek ki;
vC (t ) V1 cos wt V2 sin wt
xö (t )
iL (t ) I1 cos wt I 2 sin wt
olarak yazılabilir. Bu ifade ilk başta elde edilen durum denklemini sağlayacağından
V1
16
E
25
V2
12
E
25
I1
6
E
25
I2
8
E
25
olarak bulunurlar. Buna göre devrenin zorlanmış çözümü
xzor (t ) xö (t ) (t ) xö (0)
E 16 cos wt 12 sin wt (10t 16)et
25 6 cos wt 8 sin wt (10t 6)et
ve tam çözümü
t 1 t
xtam (t ) e
t
olarak bulunur.
t vC (0) E 16 cos wt 12 sin wt (10t 16)et
1 t iL (0) 25 6 cos wt 8 sin wt (10t 6)et
t için x zor (t ) xö (t ) ve xh (t ) 0 olacaktır. Sonuçta
xtam (t ) xö (t ) olarak bulunur. Sürekli durumda vC (t ) ve i L (t ) aralarında faz farkı
bulunan sinüs fonksiyonları olacaklardır. Devredeki öteki bütün akım ve gerilim
büyüklükleri
durum
değişkenlerinin
ve
kaynak
fonksiyonlarının
doğrusal
kombinezonları olarak yazılabildiklerinden, bunlar da ya sinüs fonksiyonları ya da bir
sabit eklenmiş sinüs fonksiyonları şeklinde olacaklardır.
Örnek Alınan Devrenin Sürekli Sinüzoidal Hal’de Çözülmesi
Verilen devre asimptotik kararlı olduğundan, sürekli halde devrenin zorlanmış
çözümü, özel çözümüne eşit olur. Bu çözüm ise
2 cos( wt )
E 16 cos wt 12 sin wt 2 E
xö (t )
’dir.
25 6 cos wt 8 sin wt
5 cos( wt )
2
13
E katsayısı devredeki sinüzoidal gerilim kaynağının maksimum değerini
göstermektedir. Eğer bu sonuç fazör büyüklükleriyle elde edilmek istenirse w=2
olmak üzere,
V e j c
j 2 e j
I l e l
2 1 Ve e j c
0 I l e j l
1
Ve (t ) E cos wt 2
2 E j 0
e
0 2
yazılabilir. Eğer
E
cos wt 2Ve cos wt ve Ve Ve e j 0
2
Vc Vc e j c 2 j 2
I
j
l I l e l 1
1
j 2
1
2
2Ve 2(4 j3) 2Ve
0Ve 25 (3 j 4) 5
alınırsa
2e j
j ( 2 )
e
bulunur. Bu ifadeyi yeniden t tanım bölgesinde yazarsak;
vc (t ) E 16 cos wt 12 sin wt
i (t ) 25 6 cos wt 8 sin wt
L
ifadesi elde edilir. Bu ise devrenin özel çözümüdür. Buradan da görüldüğü gibi
Sürekli Sinüzoidal Halde elde edilen çözüm devrenin özel çözümüne eşittir.
Devrenin parametrelerini
i L (0) 2 A , vC (0) 2V , R 0.5 , L 1H ,
C 1F , w 0.2Hz , E 0.5 olarak alındığında çözümler aşağıdaki şekillerdeki
gibi olmaktadır.
14
Tam Çözüm
0.5
Endüktans Ak m
0
-0.5
-1
-1.5
-2
0
50
100
150
Zaman
200
250
300
200
250
300
Tam Çözüm
2
Kapasite Gerilimi
1.5
1
0.5
0
-0.5
0
50
100
150
Zaman
15
Zorlanmis Çözüm
0.5
0.4
0.3
Kapasite Gerilimi
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
0
50
100
150
Zaman
200
250
300
200
250
300
Zorlanmis Çözüm
0.3
0.2
Endüktans Ak m
0.1
0
-0.1
-0.2
-0.3
-0.4
0
50
100
150
Zaman
16
Öz Çözüm
2
1.8
1.6
Kapasite Gerilimi
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
100
200
300
Zaman
400
500
600
400
500
600
Öz Çözüm
0
-0.2
-0.4
Endüktans Ak m
-0.6
-0.8
-1
-1.2
-1.4
-1.6
-1.8
-2
0
100
200
300
Zaman
17
Kaynaklar:
1. Devre Analizi Dersleri – Kısım 1, Y. Tokad, İTÜ Yayınları, 1977
2. Devre Analizi Dersleri – Kısım 2, Y. Tokad, Çağlayan Kitabevi, 1987
3. Devre Analizi Dersleri – Kısım 4, Y. Tokad, Çağlayan Kitabevi, 1987
4. Linear and Non-linear Circuits, L.O. Chua, C.A. Desoer, S.E. Kuh, McGraw-Hill,
1987
18