Uploaded by
common.user2487
Sistem Geçişleri Uğur Hasırcı

DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ
MM306 SİSTEM DİNAMİĞİ
Dr. Uğur HASIRCI
• Zaman Domeninde Modelleme
• Transfer Fonksiyonu – Durum Uzay Dönüşümü
• Durum Uzay – Transfer Fonksiyonu DönüşümÜ
1
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
MÜHENDİSLİK
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MAKİNE MÜHENDİSLİĞİ
MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
BÖLÜMÜ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
MM306
DİNAMİĞİ
Dr. Uğur HASIRCI
Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
modelinin ortaya konulması gerektiğini, tabiattaki tüm dinamik sistemlerin
Diferansiyel Denklemler ile modellendiğini, sonra bu diferansiyel denklem
modelinin, kontrolör tasarımı için çok daha kullanışlı bir forma
dönüştürüldüğünü söylemiştik. Bu dönüşüm için iki yaklaşım söz
konusuydu:
1. Frekans Domeni Yaklaşımı (Klasik Yaklaşım): Sistemi modelleyen
diferansiyel denklem, “Laplace Dönüşümü” yoluyla frekans domeninde
ifade edilir. Bu yaklaşım sadece doğrusal sistemlere uygulanabilir.
2. Zaman Domeni Yaklaşımı (Modern Yaklaşım): Sistemi modelleyen
diferansiyel denklem, “Durum-Uzay Dönüşümü” yoluyla zaman
domeninde ifade edilir. Bu yaklaşım hem doğrusal, hem de doğrusal
olmayan sistemlere uygulanabilir.
Bir önceki derste klasik yaklaşımdan bahsettik. Bugün ise modern
yaklaşım tanıtılacaktır.
2
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Klasik yaklaşım, sistemi modelleyen diferansiyel denklemi, Laplace dönüşümü
yoluyla cebirsel bir denkleme dönüştürür. Bu yaklaşımın temel dezavantajı, sadece
doğrusal zamanla değişmeyen sistemlere uygulanabilmesidir. Temel avantajı ise,
kararlılık ve geçici zaman cevabı gibi temel performans spesifikasyonları ile ilgili
olarak çok fazla matematiksel işleme gerek bırakmadan bilgi sağlamasıdır.
Soğuk savaş döneminde uzay araştırmalarının yoğunlaşması, hem kontrol
sistemlerine duyulan ihtiyacı artırmış, hem de doğrusal olmayan sistemlerin daha
yaygın bir biçimde ortaya çıkmasına sebep olmuştur. Bu nedenle yeni bir
modelleme ve kontrol yaklaşımına ihtiyaç duyulmuştur. Modern Yaklaşım, ya da
diğer isimleri ile “Zaman Domeni Yaklaşımı” ve “Durum-Uzay Yaklaşımı” bu
ihtiyacın sonucu olarak ortaya çıkmıştır. Modern yaklaşımın temel avantajı hem
doğrusal hem de doğrusal olmayan sistemlere uygulanabilir olmasıdır (bugünkü
derste sadece doğrusal sistemlere, son hafta ise doğrusal olmayan sistemlere
uygulanmasını inceleyeceğiz,). Temel dezavantajı ise sistem performansının
belirlenmesi için görece daha fazla matematiksel hesap gerektirmesidir. Ancak
günümüz bilgisayarları ve ticari paket programlar bu hesaplamaları çok kısa sürede
yapabilmektedir.
3
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Durum-Uzay Yaklaşımı ağırlıklı olarak matris cebrine dayalıdır. Bu nedenle temel
Lineer Cebir tanım ve aksiyomlarını gözden geçirmeniz önerilir.
Şimdi Durum-Uzay Yaklaşımında sıkça kullanacağımız bazı ek kavramların
tanımlarını verelim:
Lineer Kombinasyon: xi, {i=1,2,……,n} ile gösterilen n adet değişkenin lineer
kombinasyonu,
S Kn xn Kn 1xn 1 ....... K1x1
ile gösterilen toplamdır. Buradaki her bir Ki katsayısı birer sabittir.
Lineer Bağımsızlık: Bir değişken kümesi, eğer o kümedeki elemanların her biri
diğerlerinin lineer kombinasyonu şeklinde yazılamıyorsa lineer bağımsızdır.
Örneğin 3 elemanlı, x1, x2 ve x3 değişkenlerinden oluşan kümeyi ele alalım. Eğer bu
kümede x2=5x1+6x3 şeklinde ise, bu küme lineer bağımsız değildir! Çünkü
değişkenlerden biri, diğer ikisinin lineer kombinasyonu şeklinde yazılabiliyordur. Bir
elektrik devresinde direncin uçlarındaki gerilim ile direnç üzerinden akan akımdan,
yani vr ve ir değişkenlerinden oluşan bir küme düşünelim. vr=Rir olduğu için, yani
bu iki değişken birbirinin lineer kombinasyonu şeklinde yazılabildiği için, bu küme
de lineer bağımsız değildir. Bir kümede, ancak tüm Ki=0 ve xi≠0 olduğu zaman S
4
toplamı sıfır oluyorsa o küme bağımsızdır.
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Sistem Değişkeni: Bir sistemde, herhangi bir girişe (etkiye) tepki üreten tüm
değişkenler, o sistem için birer sistem değişkenidir. Örneğin bir elektrik
devresine gerilim uygulanırsa, devreden bir akım geçmeye başlar ve bu
nedenle akım bir sistem değişkenidir. Ya da dönen bir mekanik sisteme tork
uygulanırsa açısal konum değişeceğinden, açısal konum (yerdeğiştirme) bir
sistem değişkenidir.
Durum Değişkeni: Sistem değişkenlerinin birbirinden lineer bağımsız olanların
en küçük kümesine durum değişkenleri denir. Durum değişkenlerinin seçimi,
“Durum-Uzay Yöntemi” için kritik öneme sahiptir.
Durum Vektörü: Elemanları durum değişkenleri olan vektördür.
Durum Uzayı: Eksenleri durum değişkenleri olan n-boyutlu uzaydır.
5
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
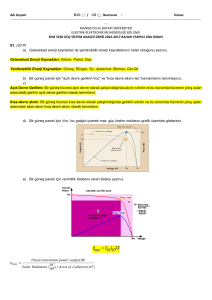
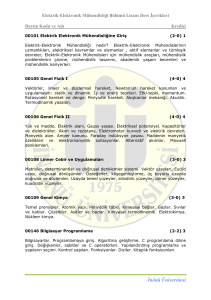
Durum Uzayı kavramını görselleştirmek için aşağıdaki şekli göz önünde
bulunduralım. Bu örnek şekilde, bir elektrik devresine ait iki adet durum değişkeni
vardır: Direncin uçlarındaki gerilim vR ve kondansatörün uçlarındaki gerilim vC. Bu
iki değişken şekildeki gibi 2 boyutlu bir uzay oluşturur. Durum vektörü x(t), bu iki
değişkeni içeren bir vektördür. Yani;
v
x (t ) R
vC
şeklindedir. Yörünge (trajectory),
zaman geçtikçe bu vektörün uzayda
aldığı değerleri gösterir. Örneğin t=4
anında durum vektörü, yörünge
üzerinde
şekilde
gösterilen
konumdadır.
6
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Durum Denklemleri: n tane durum değişkeni içeren bir sistemin, n adet birinci
mertebeden diferansiyel denklem kümesidir. Yani, sistemi modelleyen
diferansiyel denklem kullanılarak, sistemin her bir durum değişkeni için bir adet
birinci mertebeden diferansiyel denklem yazılır.
Çıkış Denklemi: Çıkış değişkeni olarak seçilen değişkene ilişkin denklemdir. Bu
denklem, durum değişkenleri ve giriş değişkenlerinin bir kombinasyonudur.
Bu kadar göz korkutucu tanımdan sonra, bir sistemin durum-uzay modelinin
genel formunu verip, daha sonra örnekler üzerinden, diferansiyel denklem
modeli bilinen bir sistemin durum-uzay modelinin nasıl oluşturulacağını
açıklayalım.
7
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Bir sistemin durum-uzay modelinin genel formu aşağıdaki gibidir:
x Ax Bu
y Cx Du
Bu dersin geri kalan kısmında artık sıkça göreceğiniz bu iki denklemden ilki
“Durum Denklemi”, ikincisi ise “Çıkış Denklemi” olarak adlandırılır. (Bu
denklemlerdeki değişkenler birer vektör/matris olduğu için, matematiksel notasyon gereği kalın
yazılırlar). Bu değişkenlerden her biri aşağıdaki gibi isimlendirilir:
x : Durum vektörü (Elemanları durum değişkenleri olan vektör)
x : Durum değişkenlerinin zamana göre türevi
y : Çıkış vektörü (Elemanları çıkış değişkenleri olan vektör)
u : Giriş vektörü (Elemanları giriş değişkenleri olan vektör)
A : Sistem matrisi
B : Giriş matrisi
C : Çıkış matrisi
D: İleribesleme matrisi
8
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
x Ax Bu
y Cx Du
Diferansiyel denklem modeli bilinen bir sistemin, bu diferansiyel denklem
modelinin yukarıdaki durum-uzay formuna sokulmasına ilişkin aşamalar şu
şekildedir:
1. Durum değişkenlerinin seçilmesi
2. Diferansiyel denklem modelinin, cebirsel işlemlere her biri durum
değişkenlerinden birinin birinci mertebeden diferansiyel denklemi olacak
şekilde yeniden yazılarak Durum Denkleminin oluşturulması
3. Çıkış Denkleminin oluşturulması
Buradaki ikinci ve üçüncü aşama basit matematiksel işlemlerden oluşmaktadır.
Ancak ilk aşama, yani durum değişkenlerinin seçimi üzerine birkaç önemli
noktayı vurgulayalım.
9
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
• Her şeyden önce durum değişkenleri lineer bağımsız olmalıdır.
• Genellikle durum değişkenlerinin sayısı, sistemi modelleyen diferansiyel
denklemin mertebesine eşittir.
• Durum değişkenlerinin seçimine ilişkin pratik bir yaklaşım, sistemde enerji
depolayan elemanlara ilişkin değişkenlerin, durum değişkeni olarak seçilmesidir.
Örneğin bir elektrik devresinde enerji depolayan elamanlar indüktör ve
kapasitördür. İndüktör, enerjiyi manyetik alanda depolar. Manyetik alan, akımın bir
fonksiyonu olduğu için indüktör akımı durum değişkeni olarak seçilir. Kapasitör ise
enerjiyi elektrik alanda depolar. Elektrik alan, gerilimin bir fonksiyonudur ve bu
nedenle kapasitör uçlarındaki gerilim durum değişkeni olarak seçilir. Mekanik
sistemlerde ise (genellikle) kütlenin pozisyonu ve hızı durum değişkeni olarak
seçilir.
• Tüm bu bilgilere ek olarak, durum değişkenlerinin seçimi genellikle mühendislik
tecrübesi yoluyla edinilen bir yetidir.
Tüm bu sıkıcı tanım ve açıklamaları örneklerle somutlaştıralım:
10
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Ör: İlk önce basit bir diferansiyel denklem modelini Durum-Uzay formuna
dönüştürmekle başlayalım. Daha sonra diğer örneklerde fiziksel sistemlere ve bu
fiziksel sistemlerde durum değişkenlerinin nasıl seçileceğine geçelim. Aşağıdaki
ikinci mertebeden diferansiyel denklemi göz önünde bulunduralım:
z 2z 7 z 3u
İkinci mertebeden bu doğrusal diferansiyel denklemde bağımsız değişken her ne
kadar doğrudan görünmese de, ● (dot) operatörü genellikle zamana göre türevi
sembolize eder. Şimdi durum-uzay denklemlerinin genel formunu hatırlayalım:
x Ax Bu
Durum Denklemi
y Cx Du
Çıkış Denklemi
Yapmamız gerekenler sırasıyla; (1) durum değişkenlerini (x) seçmek, (2) durum
değişkenlerinin türevini, yine durum değişkenleri (x) ve giriş değişkeni (u) cinsinden
birinci mertebeden denklemler şeklinde yazarak durum denklemini oluşturmak, (3)
çıkış değişkenini (y) seçmek ve çıkış değişkenini durum değişkenleri ve giriş
11
değişkeni cinsinden yazmak.
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
z 2z 7 z 3u
Bu diferansiyel denklem ikinci mertebeden olduğu için iki adet durum değişkeni
olacaktır. Bu durum değişkenlerini
x1 z
x2 z
olarak seçelim. Bu durum değişkenlerinin türevini aldığımızda;
x1 z x2
x2 z 2 x2 7 x1 3u
Böylece durum değişkenlerinin türevini, yine durum değişkenleri ve giriş değişkeni
cinsinden ifade etmiş olduk. Yani artık durum denklemini yazabiliriz:
x Ax Bu
x1 0 1 x1 0
x 7 2 x 3 u
2
2
A
B
12
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Çıkış değişkenini de y=z olarak seçelim. Bu durumda çıkış denklemi vektör-matris
formunda aşağıdaki gibi olacaktır:
x1
y 1 0
x2
C
Bu örnekte çıkışın (y), giriş (u) ile doğrudan bir bağıntısı olmadığı için D matrisi
sıfıra eşittir. Sonuç olarak bu diferansiyel denklemin durum-uzay gösterimi
aşağıdaki gibi olacaktır:
x Ax Bu
y Cx Du
x1 0 1 x1 0
x 7 2 x 3 u
2
2
x1
y 1 0
x2
13
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Sistem n boyutluysa, yani sistemi modelleyen diferansiyel denklem n’inci
mertebeden bir denklemse, A matrisi n×n boyutlu bir kare matristir. Bu örnekte iki
durum değişkeni olduğu için, A matrisi 2×2 bir matristir.
Sistemdeki diğer matris ve vektörlerin boyutu aşağıdaki gibidir: (Bu örnekte sistem Tek
Giriş – Tek Çıkış bir sistemdir. Birçok sistem Çok Giriş – Çok Çıkış (Multi Input – Multi Output)
olabilir. Yani birden fazla giriş ve/veya çıkış değişkenine sahip olabilir. Bu nedenle aşağıda
matris boyutlarının en genel hali verilmiştir. p giriş değişkeni sayısını, r ise çıkış değişkeni
sayısını göstermektedir.)
x : n×1
x : n×1
y : r×1
u : p×1
A : n×n
B : n×p
C : r×n
D: r×p
14
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
x Ax Bu
y Cx Du
Sistemi modelleyen diferansiyel denklemi neden yukarıdaki formda yazmaya
zorladığımız sorusu haklı olarak akla gelebilir. Hatırlanacağı üzere klasik yaklaşımda
sistemi modelleyen diferansiyel denklemi Laplace Dönüşümü yoluyla frekans
domeninde ifade edip, daha sonra transfer fonksiyonunu yazıyorduk. Bunun
nedeni, transfer fonksiyonunun sistemin davranışı hakkında bize kullanışlı bilgiler
sağlamasıydı. Örneğin sistem kararlılığı, geçici hal cevabı gibi önemli performans
kriterlerini transfer fonksiyonu yoluyla belirleyebiliriz. Aynı neden, modern
yaklaşım için de geçerlidir. Yani sistemi modelleyen diferansiyel denklemi DurumUzay Dönüşümü yoluyla yukarıdaki formda yazmamızın nedeni, buradaki A, B, C
ve D matrislerinin sistem performansı hakkında kullanışlı bilgi sağlamasıdır.
Örneğin sistemin kararlı olup olmadığı A matrisinin özdeğerleri bulunarak
belirlenebilir. Aynı diferansiyel denklemi hem transfer fonksiyonu formunda hem
de durum-uzay formunda ifade edersek, A matrisinin özdeğerleri ile transfer
15
fonksiyonunun kutuplarının tamamen aynı değerde olduğunu görürüz.
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
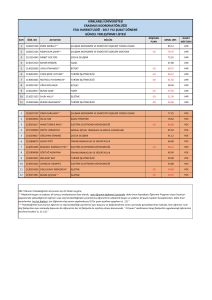
Ör: Şimdi de daha önce transfer fonksiyonunu türettiğimiz aşağıdaki mekanik
sistemin durum-uzay denklemlerini türetelim. Cisme etki eden kuvvetler şekilde
gösterildiği gibidir. Newton yasasına göre;
F ma
dx(t )
d 2 x(t )
f (t ) f v
Kx(t ) m
dt
dt 2
Sistemin giriş değişkeninin f(t) olduğunu biliyoruz.
Çıkış değişkeni olarak, yani değişimini gözlemek
istediğimiz değişken olarak x(t)’yi seçelim.
Yukarıdaki diferansiyel denklem ikinci mertebeden
olduğu için iki adet durum değişkeni olmalıdır. Bu
değişkenlerin bu tür mekanik sistemlerde
genellikle kütlenin konumu x(t) ve hızı v(t) olarak
seçildiğini daha önce vurgulamıştık.
16
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
d 2 x(t )
dx(t )
m
fv
Kx(t ) f (t )
2
dt
dt
Durum değişkenlerini
x1 x
dx
x2
dt
olarak seçelim. Bu durum değişkenlerinin zaman göre türevini aldığımızda
x1 x2
fv
k
1
x2 x2 x1 f (t )
m
m
m
elde ederiz. Çıkış denklemi ise şu şekildedir:
y x1
17
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
x1 x2
fv
k
1
x2 x2 x1 f (t )
m
m
m
y x1
Durum Denklemi
Çıkış Denklemi
Bu denklemler, vektör-matris formunda aşağıdaki gibi yazılır:
x Ax Bu
y Cx Du
0
x1
x k
2
m
1
0
x1
f v 1 f (t )
x2
m
m
x1
y 1 0
18
x2
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Alıştırma: Aşağıdaki sistemin durum-uzay denklemlerini türetiniz. Çıkış değişkeni
olarak x2(t) değişkenini seçiniz.
İpucu: Bu sistemde hareket eden iki adet kütle olduğu için, her birine ilişkin birer
tane ikinci mertebeden diferansiyel denklem olacaktır. Dolayısıyla her bir kütleye
ilişkin ikişer tane de durum değişkeni, yani toplamda dört durum değişkeni
olacaktır. Bu durum değişkenleri x1, v1, x2 ve v2 dir.
19
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
1
0
x1 0
v K / M D / M
K / M1
1
1
1
x2 0
0
0
0
K / M 2
v2 K / M 2
Çıkış denklemi?
0 x1 0
0 v1 0
f (t )
1 x2 0
0 v2 1 / M 2
20
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
• Zaman Domeninde Modelleme
• Transfer Fonksiyonu – Durum Uzay Dönüşümü
• Durum Uzay – Transfer Fonksiyonu Dönüşümü
21
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Daha önce bir sistemin transfer fonksiyonu modeli ile durum-uzay modelinin
birbirinin duali olduğunu, sistemin dinamik davranışı hakkında aynı bilgileri
verdiklerini, örneğin transfer fonksiyonunun kutupları ile sistem matrisi A’nın
özdeğerlerinin aynı olduğunu söylemiştik. Bu durumda bu iki modelin birbirine
dönüştürülmesi mümkündür. Her iki modelleme yaklaşımının da birbirlerine göre
avantajlı yönleri vardır. Dolayısıyla bu dönüşümlerde amaç, dönüşüm yapılan
modelleme yaklaşımının avantajlarından faydalanmaktır. Bir sistemin transfer
fonksiyonu modelinin, durum-uzay modeline nasıl dönüştürüleceğinden
başlayalım. Bunun için önce o transfer fonksiyonuna ilişkin diferansiyel denklem
yazılır, daha sonra bu dif. denklem durum-uzay formuna dönüştürülür. Önce n’inci
mertebeden bir diferansiyel denklemin durum-uzay formunda yazılmasını aşama
aşama anlatıp, daha sonra bunun transfer fonksiyonlarına nasıl uygulanacağını
gösterelim. n’inci mertebeden sabit katsayılı lineer bir diferansiyel denklemin
genel formu
dny
d n 1 y
d n2 y
dy
an 1 n 1 an 2 n 2 ............ a1 a0 y b0u
n
dt
dt
dt
dt
şeklindedir.
22
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
dny
d n 1 y
d n2 y
dy
an 1 n 1 an 2 n 2 ............ a1 a0 y b0u
n
dt
dt
dt
dt
şeklindedir. Bu diferansiyel denklemi durum-uzay formunda ifade etmek için,
durum değişkenlerini birbirinin ardışık türevi olacak şekilde aşağıdaki gibi seçelim:
dy
x
x2
1
x1 y
dt
2
dy
d
y
x2
x2 2 x3
dt
dt
3
d 2 y Denklemlerin her iki
d
y
x3 2
x
x4
dt tarafının türevi alınırsa: 3 dt 3
.
.
.
.
.
d n 1 y
xn n 1
dt
.
dny
xn n a0 x1 a1 x2 ........ an 1 xn b230u
dt
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Bu durumda bu diferansiyel denklemin durum-uzay formu aşağıdaki gibi olacaktır.
x1 0
x 0
2
x3 0
. .
. .
. .
x 0
n 1
xn a0
1
0
0
1
0
0
.
.
.
.
.
.
0
0
1
.
.
.
0
0
0
.
.
.
a3
.
.
.
a1 a2
0 x1 0
0 x2 0
0 x3 0
. . .
u
.
.
.
. . .
1 xn 1 0
an 1 xn b0
Yukarıdaki forma “faz-değişkeni formu” denir. Bu form, sistem matrisindeki ve 1 ve
0’ların deseninden kolayca tanınabilir.
24
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Çıkış değişkeni, diferansiyel denklemin çözümü olan y(t) dir. Bu değişken x1 olarak
seçildiği için, çıkış denklemi ise şu şekilde olacaktır:
x1
x
2
x3
.
y 1 0 0 0 . . . 0
.
.
x
n 1
xn
Özet olarak, transfer fonksiyonunu durum-uzay formuna dönüştürmek için, önce o
transfer fonksiyonunun içler-dışlar çarpımı yoluyla ve tüm başlangıç koşulları sıfır
kabul edilerek Ters Laplace Dönüşümü ile diferansiyel denklemi yazılır, daha sonra
bu diferansiyel denklem yukarıda anlatıldığı gibi “faz-değişkeni formu”nda durum25
uzay denklemlerine dönüştürülür. Örneklerle somutlaştıralım:
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Ör: Aşağıdaki transfer fonksiyonunun durum-uzay gösterimini türetiniz.
C ( s)
24
3
R( s) s 9s 2 26s 24
C: Bu dönüşüm, aşağıda adım adım gösterilmiştir:
Adım 1: Transfer fonksiyonunu diferansiyel denkleme dönüştür:
İçler-dışlar çarpımı yapılırsa: s3 9s 2 26s 24 C (s) 24R(s)
Ters Laplace Dönüşümü alınırsa:
(Tüm başlangıç koşulları = 0)
c 9c 26c 24c 24r
Adım 2: Durum değişkenlerini seç:
Durum değişkenleri, çıkış değişkeninin ardışık türevleri olarak seçilirse:
x1 c
x2 c
x3 c
Denklemlerin her iki
tarafının türevi alınırsa:
x1 x2
x2 x3
x3 24 x1 26 x2 9 x3 24r
26
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Çıkış denklemi de y=c=x1 olduğu için, verilen transfer fonksiyonunun durum-uzay
formu aşağıdaki gibi olur:
1
0 x1 0
x1 0
x 0
x 0 r
0
1
2
2
x3 24 26 9 x3 1
x1
y 1 0 0 x2
x3
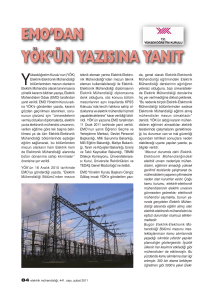
Sağdaki şekil ise, bu sistemin blok diyagramıdır.
27
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Bu örnekte, verilen transfer fonksiyonunun pay kısmında sadece bir sabit sayı (24)
vardı. Peki pay kısmında bir polinom olması durumunda dönüşümün nasıl bir form
alır? Genel formu Şekil (a)’da görülen bu tür bir transfer fonksiyonunun durumuzay formunun hesaplanması için en pratik yöntem, Şekil (b)’de görüldüğü gibi
transfer fonksiyonunu iki ayrı blok diyagramın kaskat bağlı hali gibi düşünmektir.
Böylece ilk önce R(s) ile X1(s) arasındaki transfer fonksiyonunun durum-uzay
formu, az önceki örnekte anlatıldığı gibi elde edilir.
28
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Bu durumda çıkışın ifadesi: C (s) b2 s 2 b1s b0 X1 (s)
d 2 x1
dx1
b0 x1
Ters Laplace Dönüşümü alınırsa: y(t ) c(t ) b2 2 b1
dt
dt
Durum değişkenleri, çıkış değişkeninin ardışık türevleri olarak seçildiği için, bu
denklem aynı zamana şuna eşittir: y(t ) c(t ) b2 x3 b1x2 b0 x1 . Yani pay kısmındaki
polinom, sadece çıkış denklemini etkiler. Buna ilişkin bir örnek yapalım.
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
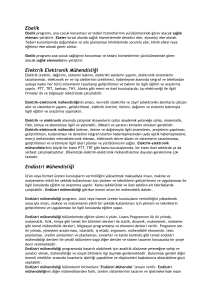
Ör: Aşağıdaki transfer fonksiyonunun durum-uzay gösterimini türetiniz.
C: Bu dönüşüm, aşağıda adım adım gösterilmiştir:
Adım 1: Transfer fonksiyonunu aşağıdaki gibi iki blok halinde ayır:
Adım 2: R(s) ile X1(s) arasındaki transfer fonksiyonunu bul:
Payda polinomunun katsayıları bir önceki örnekle aynıdır (sadece pay kısmında 24 yok)
1
0 x1 0
x1 0
x 0
x 0 r
0
1
2
2
x3 24 26 9 x3 1
30
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Adım 3: Çıkış denklemini elde et:
C (s) s 2 7 s 2 X 1 (s)
y(t ) c(t ) x1 7 x1 2 x1
y(t ) c(t ) x3 7 x2 2 x1
x1
y 2 7 1 x2
x3
31
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Alıştırma: Aşağıda verilen transfer fonksiyonunun durum-uzay formunu elde ediniz.
2s 1
G( s) 2
s 7s 9
0 1
0
x
x r (t )
9 7
1
y 1 2 x
32
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
• Zaman Domeninde Modelleme
• Transfer Fonksiyonu – Durum Uzay Dönüşümü
• Durum Uzay – Transfer Fonksiyonu Dönüşümü
33
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Şimdi de dinamik modeli durum-uzay formunda verilmiş bir sistemin transfer
fonksiyonunun nasıl bulunacağını inceleyelim.
Durum denkleminin ve çıkış denklemlerinin genel formu: x Ax Bu
y Cx Du
Denklemlerin her iki tarafının Laplace Dönüşümü alınırsa:
sX ( s) AX ( s) BU ( s)
Y ( s) CX ( s) DU ( s)
Durum denklemi X(s) için çözülürse:
(I: Birim matris)
sI A X (s) BU (s)
1
X ( s) sI A BU ( s)
X(s) için elde edilen bu ifade çıkış denkleminde yerine yazılırsa:
Y ( s) C sI A BU ( s) DU ( s)
1
1
Y ( s) C sI A B D U ( s)
Dikkat edilirse bu denklem, sistem çıkışı Y(s) ile sistem girişi U(s)’i doğrudan birbiriyle
34
ilişkilendirir. Eğer giriş ve çıkış skaler ise, bu denklem kullanılarak transfer fonksiyonu yazılır.
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
1
Y (s) C sI A B D U (s)
Y ( s)
1
T (s)
C sI A B D
U ( s)
Bu denklem kullanılarak transfer fonksiyonunun nasıl
hesaplanacağına ilişkin bir örnek yapalım.
35
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Ör: Aşağıda durum-uzay modeli verilen sistemin transfer fonksiyonunu türetiniz.
0 1 0
10
x 0 0 1 x 0 u
1 2 3
0
y 1 0 0 x
C: Dönüşüm,
T (s)
Y ( s)
1
C sI A B D denklemi kullanılarak yapılır.
U ( s)
Bu denklemin en çok hesap yükü gerektiren kısmı (sI-A)-1 matrisidir. Bu matrisin
hesaplanması için öncelikle (sI-A) matrisi hesaplanıp, daha sonra bu matrisin tersi bulunur.
0
s 0 0 0 1 0 s 1
sI A 0 s 0 0 0 1 0 s 1
0 0 s 1 2 3 1 2 s 3
36
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
s 2 3s 2
s3
1
1
s ( s 3) s
2
s
(2
s
1)
s
adj
s
I
A
1
sI A
det sI A
s 3 3s 2 2s 1
T (s)
Y ( s)
1
C sI A B D
U ( s)
s 2 3s 2
s3
1
1
s( s 3) s
2 10
s
(2s 1) s
T ( s) 1 0 0
00
3
2
s 3s 2s 1
0
C
(sI-A)-1
B
D
T ( s)
10 s 2 3s 2
s 3 3s 2 2s 1
37
MÜHENDİSLİK
FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ
BÖLÜMÜ BÖLÜMÜ
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ
FAKÜLTESİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
ELEKTRİK-ELEKTRONİK
MÜHENDİSLİĞİ
BÖLÜMÜ
MM306
DİNAMİĞİ
EEM304
KONTROL
SİSTEMLERİNE
EET305 SİSTEM
OTOMATİK
KONTROL I GİRİŞ
Dr. Uğur HASIRCI
Alıştırma: Aşağıda durum-uzay modeli verilen sistemin transfer fonksiyonunu türetiniz.
4 1.5
2
x
x u
0
4
0
y 1.5 0.625 x
3s 5
G( s) 2
s 4s 6
38