RİJİT CİSİMLERİN
DÜZLEMSEL KİNETİĞİ
Rijit cismin kinetiği, cisme etki eden kuvvetler ile cismin şekli,
kütlesi ve bu kuvvetlerin yarattığı hareket arasındaki
bağıntıları inceler.
Parçacığın
kinetiği
konusunda
cismi
yalnızca
kütle
merkezinden ibaret bir nokta gibi ele almıştık ve cisme
etkiyen tüm kuvvetler bu noktadan geçmek zorundaydı. Rijit
cisimde ise cismin gerçek boyutları ile birlikte, kuvvetlerin
cisme uygulandıkları noktaların yeri de göz önüne alınacaktır.
Cismin tamamının yaptığı hareketin yanı sıra, cismin kendi
kütle merkezi etrafındaki hareketi de incelenecektir.
Kütle-Kuvvet-İvme Bağıntıları
Genel Hareket Denklemleri
Statikte, cisme etkiyen kuvvet sistemi keyfi olarak alınan bir
noktaya bir bileşke kuvvet ve bir bileşke kupl momenti olarak
indirgenebiliyordu.
Yani
kuvvet
sistemi
sonsuz
sayıda
bileşkeyle
yer
değiştirebiliyordu. Eğer bu keyfi noktayı rijit cismin G kütle
merkezi olarak alır ve bileşkeyi bileşke kuvvetin doğrultusu bu
noktadan geçecek şekilde yerleştirirsek dış kuvvet sisteminin
etkisine cismin verdiği dinamik yanıtı (Dynamic Response)
aşağıdaki gibi canlandırabiliriz:
SCD
(a)
Eşdeğer Kuvvet-Kupl Diyagramı
(b)
Kinetik Diyagram
(c)
F ma
M G HG
1) Cisme etkiyen dış kuvvetlerin gösterildiği SCD
2) Bileşke kuvvetin G’ ye indirgendiği eşdeğer kuvvet-kupl diyagramı
3) Bunların sonucunda cismin bunlara verdiği dinamik yanıt (davranış)-Kinetik diyagram
RİJİT CİSMİN DÜZLEMSEL HAREKET DENKLEMLERİ
xy düzleminde genel hareket yapan cismin G kütle merkezi
a doğrusal
ivmesine ve cisim w açısal hızı ve a açısal ivmesine sahip olsun. Genel
hareket yapan bu cismin G kütle merkezine göre H G açısal momentumunun
neye eşit olduğunu çıkaralım ve daha sonra zaman türevini alalım.
Cismi oluşturan parçacıklardan herhangi birini temsilen mi parçacığını dikkate
alalım. Bu parçacığın G’ ye göre açısal momentumu:
i
H Gi i mi i
: mi parçacığının G’ye göre konum vektörü
m parçacığının hızı
i vi w i i
i i cosi sin j
w wk
H Gi i mi w i
Rijit cismin G’ ye göre açısal momentumu, onu oluşturan tüm parçacıkların G’ ye
göre açısal momentumlarının toplamına eşit olacaktır.
H Gi
HG
mi i2w cos 2 sin 2 k
i
i
1
H G Iwk
i
i cos i sin j mi wk i cos i sin j
miw i cosj miw i sin i
2
mi i wk
m w
HG
I
H G Iw
I katı cismin G’ ye göre (veya G’ den geçen ve şekil düzlemine dik olan z eksenine
göre) kütle eylemsizlik (atalet) momentidir.
n
n
I
mi i2
i 1
M
G
HG
I kgm2
2 dm
mi
M
G
HG d
dw
Iw I
Ia
dt
dt
dt
a
M
G
Ia
Analiz Yöntemi
Rijit cisimlerin hareketleri ile kuvvet-kütle-ivme problemleri çözülürken
aşağıdaki sıra izlenir:
1) Kinematik : Öncelikle ne tip bir hareket olduğu tanımlanmalı ve bilinmeyen
gerekli doğrusal-açısal ivme değerleri kinematik bağıntılar kullanılarak
belirlenmelidir.
2) Diyagramların çizilmesi : SCD ve kinetik diyagram oluşturulup uygun
eksen takımı seçilmelidir.
3) Hareket denklemlerinin uygulanması
(
F ma ,
M
G
Ia
)
Kütle Atalet Momenti
dm kütleli sonsuz küçük bir elemanın OO eksenine göre kütle atalet momenti dI
O
r
dm
dI r 2 dm
O
m kütleli cismin toplam atalet momenti I ise
I dI r 2 dm
I her zaman pozitiftir, birimi kg.m2’ dir.
Paralel Eksenler Teoremi:
G
Kütle merkezinden geçen eksene göre atalet momenti biliniyorsa,
herhangi bir eksene göre kütle atalet momenti;
I O I md 2
d
O
Bazı Geometrik Şekillerin Kütle Atalet Momentleri
İnce Çubuk
İnce dairesel plaka
Jirasyon (Atalet) Yarıçapı
Bir doğruya göre kütle atalet momenti:
I k 2m
k
k : jirasyon yarıçapı
I
m
İnce dikdörtgen plaka
1) ÖTELENME
a) Doğrusal Ötelenme (Rectilinear Translation):
SCD
Kinetik Diyagram
w0 a0
F1
“m”
x
d
G
F2
A
P
Fn
x
“m”
G
A
d
P
ma x
F3
F
F
d .k .
ma
x d .k .
ma x
M
M
M
G dk
A dk
P dk
0
0
ma d
b) Eğrisel Ötelenme (Curvilinear Translation):
SCD
Kinetik Diyagram
w0 a0
t
“m”
F2
n d .k .
F
t dk
G’ nin
yörüngesi
Fn
B
A
dA
mat mar
dB
ma n
mat
G
G
man mw 2 r
n
F3
F
G
t
“m”
M
M
M
G dk
n
0
A dk
ma n d A +
B dk
mat d B
+
F1
Cismin G kütle merkezinin eğrisel bir yörünge izlemesi kendisinin
açısal bir hareket yaptığı anlamına gelmez.
2) SABİT EKSEN ETRAFINDA DÖNME
Sabit bir O noktası etrafında dönme hareketinde, cismin tüm noktaları dönme ekseni etrafında
daireler çizerler, cismin yine tek bir w ve a’ sı vardır. n-t koordinatlarda kütle merkezi G’ nin ivme
2
bileşenlerine an ve a t dersek at r a ve an r w olur. SCD ve kinetik diyagram da şekildeki
gibi elde edilir.
SCD
Hareket denklemleri;
F ma
M
G
Ia
Kinetik Diyagram
Kuvvet denkleminin skaler bileşenleri;
F mar ,
t
F mw 2 r
n
O noktasındaki mesnet tepkisi SCD’ nda unutulmamalıdır.
Sabit eksenli dönme hareketinde, moment denkleminin doğrudan O noktasına
uygulanması bazen kolaylık sağlar.
M O I a mr at
M I
O
O
Paralel eksenler teoreminden;
mr 2 a mr r a I Oa
M
O
Eğer dönme ekseni G’ den geçiyorsa a 0 ve
M
G
Ia
I I O mr 2
I oa
F 0
olur, sadece
kalır.
SCD
I O I mr 2
Kinetik Diyagram
3) GENEL DÜZLEMSEL HAREKET
Ötelenme ve dönmenin birlikte olması halidir.
SCD
Kinetik Diyagram
Hareket denklemleri;
F ma
M
G
Ia
Herhangi bir P noktasına göre yazılan alternatif moment denklemi de kullanılabilir:
M
P
Ia ma d
PROBLEMLER
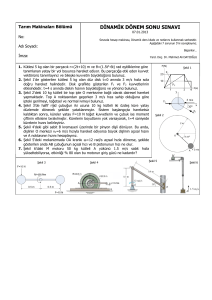
1. Düzgün 30 kg OB çubuğu O’daki mesnet ve A’daki tekerlek ile yatayla 30o
yapacak şekilde ivmelenen çerçeve üzerine monte edilmiştir. Çerçevenin
yatay ivmesi a=20 m/s2 ise tekerleğe uygulanan FA kuvveti ile O’daki pime
gelen kuvvetin x- ve y- bileşenlerini hesaplayınız.
PROBLEMLER
2. A bloğu ve ona bağlı çubuk toplam 60 kg kütleye sahiptir ve 800 N’luk
etkisi altında 60o’lik kılavuz boyunca hareket etmektedir. Düzgün yatay
çubuğun kütlesi 20 kg olup B noktasında bloğa kaynaklanmıştır. Kılavuzdaki
sürtünme ihmal edilebilir. B noktasında kaynaktan çubuğa etkiyen M
momentini hesaplayınız.
ÇÖZÜM
Kinetik Diyagram
SCD
mTax=60ax
x
x
N
60o
W=60(9.81) N
F
x
ma x
800 60 (9.81) sin 60 60 a x
a x 4.84 m / s 2
By
Çubuğun SCD
Çubuğun KD
m1ax=20ax
Bx
M
W1=20(9.81) N
M
B
ma x d
M 196 m / s 2
M 20 (9.81)0.7 (20 )( 4.94 )( 0.7 sin 60 )
PROBLEMLER
3. Paralelkenar mekanizma hem plaka hem de EF çubuğuna kaynaklanan bir pimle
E noktasında plakaya bağlanan düzgün 8 kg kütleli EF çubuğu ile birlikte düşey
düzlemde hareket etmektedir. Kolları hareket ettirmek üzere, saat yönünde bir
moment (şekilde görülmüyor) AB koluna uygulanmaktadır. q, 60o’ye ulaştığında
kolların açısal ivmesi ve hızı sırasıyla 6 rad/s2 ve 3 rad/s’dir. Bu an için E’deki
pime etkiyen F kuvveti ile M momentini hesaplayınız.
PROBLEMLER
4. 100 kg kütleli düzgün kütük iki kablo ile taşınmaktadır ve şahmerdan olarak
kullanılmaktadır. Eğer kütük görülen konumdan serbest bırakılıyorsa serbest
bırakıldıktan hemen sonra her bir kablodaki çekme kuvvet ile kabloların açısal
hızını hesaplayınız.
ÇÖZÜM
+n
SCD
Kinetik Diyagram
+n
TA
TB
ma n
+t
mat
+t
W=100(9.81) N
Harekete başladığı anda v=0, w=0 fakat a≠0
F
F
n d .k .
t d .k .
0
mat
at ar
a
an w 2 r 0
TA TB mg cos 30 0
TA TB 849 .57
mg sin 30 mat
at 4.905 m / s 2
4.905
2.45 rad / s 2
2
Kablo uzunluğu
Kütük eğrisel öteleme hareketi yapıyor.
M
G d .k .
0
TA 212 .39 N
TA sin 60 (1.5) TB sin 60 (0.5) 0
TB 637 .17 N
3TA TB
*
*
PROBLEMLER
5. 18 kg kütleli düzgün üçgen plaka AB ve CD kabloları ile taşınmaktadır. Plaka
görülen konumda iken kabloların açısal hızı s.i.t.y. 4 rad/s’dir. Bu anda, plakanın
kütle merkezinin ivmesi ile her bir kablodaki çekme kuvvetini hesaplayınız.
C
A
60°
24 cm
B
10 cm
60°
D
G
20 cm
20 cm
Cevap:
a 6.23 m / s 2
TAB 143 .11 N
TCD 78 .93 N
PROBLEMLER
6. 8 kg düzgün ince çubuk O’dan geçen yatay bir mile mafsallanmıştır ve yatay
konumdan serbest bırakılmaktadır. Başlangıç açısal ivmesinin 16 rad/s2 olması
için kütle merkezinden O’ya olan b mesafesi ile serbest bırakıldıktan hemen
sonra O’daki tepkileri hesaplayınız.
PROBLEMLER
7. Yay, düzgün çubuk düşey konumda iken serbest konumundadır. Çubuk görülen
konumdan siy’de 30o döndürüldüğü konumdan serbest bırakıldığında çubuğun a
başlangıç açısal ivmesini hesaplayınız. Yaydaki çökmeyi ve yayın kütlesini ihmal
ediniz.
ÇÖZÜM
Yayın serbest uzunluğu: lo
(2l / 4) 2 l 2
q=30o iken yay uzunluğu:
q=30o iken yay kuvveti:
3
l
2
5
5
3
3
(Bası)
k
l
l kl
2
2
2
2
l yay
Fyay
M
+t
60o
O
G
60o
l
l
1
l
Fyay ml 2 m at
4
4
2 12
a
lyay
30o
l
On
I a mat
Fyay
.
Ot +n
O
mg cos 60
30o
W
5
l
2
+t
mat
+n
G
a 0.864
Ia
man mw 2
l
0
4
k
g
0.857
m
l
l
4
PROBLEMLER
8. Şekildeki mekanizmada volanın kütlesi 50 kg ve merkezine göre atalet (jirasyon)
yarıçapı 160 mm’ dir. 10 kg kütleli AB piston kolu üniformdur. Pistonun kütlesi is 15
kg’ dır. T kuplu volanı 50 rad/s sabit açısal hız ile s.i.t.y. ‘nde döndürmektedir. q=53o
konumunda AB piston kolunun açısal hız ve açısal ivmesini, piston koluna A ve B
pimlerinden etkiyen kuvvetleri hesaplayınız. Sürtünmeyi ihmal ediniz.
sin 53=0.8, cos 53=0.6 alınız.
PROBLEMLER
9. AB elemanı bir tork tarafından (şekilde görülmüyor) sabit w=10 rad/s açısal hızı
ile döndürülmektedir. AB elemanı, 3 kg kütleli D dişli çarkını döndüren 6 kg kütleli
BC elemanını hareket ettirmektedir. Dişli çarkın C’ye göre jirasyon yarıçapı 200
mm’dir. Dişli çarkın yarıçapı r=250 mm olarak verilmektedir. Görülen anda, C ve B
pimlerine gelen kuvvetleri hesaplayınız.
PROBLEMS
10. 20 kg kütleli dengelenmemiş volanın kütle merkezine göre atalet (jirasyon)
yarıçapı
202
mm’dir.
20o’lik
eğik
düzlemden
aşağı
doğru
kaymadan
yuvarlanmaktadır. Görülen konumda volanın açısal hızı 3 rad/s’dir. bu anda
volana etkiyen sürtünme kuvvetini hesaplayınız.
ÇÖZÜM
“Genel Hareket”
SCD
KD
2
I mk 20(0.202) 2 0.816 kgm2
y
mg
x
ao ar 0.25a
=
x
ao ar 0.25a
Ia
ma
Fs
N
ax
F
x dk
ma x
y dk
ma y
N mg cos 20 20 0.075a
N 184 .367 1.5a
M
G dk
Ia
ay
mg sin 20 F 20 0.25a 0.675
F 5a 80 .604
F
aG aO aG / O 0.25ai ak 0.075 i 3k 3k 0.075 i
0
aG
0.25
0.
675
.075
j
a
i
a 15 .597 rad / s 2
F 2.617 N
N 160 .971 N
N (0.075) F (0.25) 0.816a
PROBLEMLER
11. Üniform 15 kg çubuk kütlesi ihmal edilen küçük bir tekerlek ile yatay
yüzeyde A noktasına dayanmaktadır. B ucu ve düşey yüzey arasındaki kinetik
sürtünme katsayısı 0.3 ise
görülen konumdan serbest bırakıldığı andaki A
ucunun başlangıç ivmesini hesaplayınız.