Fırat Üniversitesi-Elazığ
ZAMANLA DEĞİŞEN BAZI DOĞRUSAL SİSTEMLER İÇİN YENİ BİR ÇÖZÜM YÖNTEMİ
Hasan GÜNEYLĠ, Y. Doç. Dr. Nurdal WATSUJĠ ve Prof.Dr. Arif NACAROĞLU
Elektrik-Elektronik Mühendisliği Bölümü
Mühendislik Fakültesi
Gaziantep Üniversitesi, 27310, Gaziantep
[email protected]
[email protected]
[email protected]
A t A olduğunda A’nın kendi fonksiyonları
ÖZET
ile komütatif olma özelliği nedeniyle homojen
çözüm
Bu makalede, zamanla değişen doğrusal
sistemlerin çözülebilir olmasına ilişkin yeni bir
sınıflandırma tanımı yapılmış ve önerilen yeni
sınıf için çözüm yöntemi açıklanmıştır. Zamanla
değişen doğrusal sistemlerin genel bir analitik
çözüm yöntemi yoktur ve bu sistemlerin
çözülebilir olması, belli dönüşümler uygulanarak
sistemlerin zamanla değişmeyen sistemlere
dönüşebiliyor olması ile ilişkilidir. Bu güne kadar
yapılan çalışmalarda genel olarak iki grup
zamanla değişen doğrusal sistemlerin çözülebilir
olduğu gösterilmiş buna ek olarak bu iki gruptan
birine ait olmadığı halde, bu gruplara
dönüştürülebilen bazı özel sistemler tanıtılmıştır.
Sistemin çözülebilir olmasının belirlenmesi
sistemin öz değerlerinin yapısı ile doğrudan
ilişkilidir ve bu çalışmada da öz değerlerden yola
çıkılarak yeni bir çözülebilir grup tanımlanmıştır.
x(t ) (t , t0 ) x(t0 )
L1[ sI A]1 x(t0 )
e A(t t0 ) x(t0 )
olarak
tanımlanabilir.[1]
dx(t ) / dt A t x t
eşitliğinde
Ancak
tanımlanan
homojen zamanla değişen sistemlerde A(t)
zamanın fonksiyonu olduğunda bu sistemlerin
çözümü için genel bir yöntem henüz
tanımlanmamıştır.
Genel olarak zamanla değişen doğrusal sistemlerin
çözümü bu sistemin zamanla değişmeyen sisteme
dönüştürülebilmesi ile mümkündür. Ancak her
sistem için bu dönüşümü sağlayan dönüşüm
matrisinin var olduğu ispatlanamamıştır ve ancak
bazı sınırlı yapıdaki zamanla değişen doğrusal
sistemler
için
açık
dönüşüm
matrisleri
tanımlanabilmektedir.[2]
Anahtar Kelimeler: zamanla değişen doğrusal
sistemler, çözülebilir doğrusal sistemler.
1. GİRİŞ
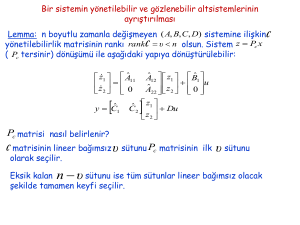
Zamanla değişen veya değişmeyen n boyutlu
doğrusal sistemler
dx(t )
A t x t B t u(t)
dt
(2)
Zamanla değişen sistemin bilinen
çözülebilir sınıflardan birine ait olup olmadığı
sistemin öz değerlerinin bazı özellikler taşıyıp
taşımadıkları ile ilgilidir. Eğer sistem matrisinin
öz değerleri sabit ise bu sistem A1 sınıfı olarak
tanımlanmakta ve
(1)
eşitliği ile tanımlanabilir. Burada, nx1 boyutlu x(t)
durum değişkenleri vektörünü, 1x1 boyutlu u(t)
giriş vektörünü, nxn boyutlu A(t) ve nx1 boyutlu
B(t) katsayı vektörlerini ifade etmektedir. A(t) ve
B(t) vektörlerinin elemanları devre elemanları ile
doğrudan ilişkilidir ve elemanların uç ilişkilerinin
zamana bağlı olup olmamaları tüm sistemin
zamana bağlı olup olmaması sonucunu ortaya
çıkartır.
A1A t – A t A1
dA(t )
dt
(3)
ilişkisini sağlayan A1 matrisi [3] ile oluşan
T (t ) e A1t
(4)
dönüşüm matrisi
x(t ) T (t ) z(t )
Zamanla değişmeyen doğrusal sistemlerin
kolay ve genel bir çözümü mevcuttur ve
168
(5)
Elektrik-Elektronik ve Bilgisayar Sempozyumu 2011
bağıntısı ile zamanla değişen dx(t ) / dt A t x t
çözümü, ters dönüşüm uygulanarak da verilen
sistemin genel çözümü elde edilir.
sistemini zamanla değişmeyen
dz (t )
Az (t )
dt
Eğer zamanla değişen doğrusal sistemin öz
değerleri bu iki özelliği de (sabit veya belli bir
fonksiyonun katı) taşımıyorsa, o sistemin
çözümünü sağlayacak dönüşüm matrisinin
bulunmasını sağlayan genel bir yöntem
olmadığından, en iyimser yaklaşımla, şanslı bir
deneme yanılma girişiminin
(6)
sistemine dönüştürür. Burada,
z (t ) (t , t0 ) z (t0 )
(7)
L1[ sI A]1 z (t0 )
A T 1 (t ) A(t )T (t ) T 1 (t )
Olduğundan [4], bulunan z(t) çözümü aynı
dönüşüm matrisi (T(t)) ile x(t) sistemine geri
dönüştürülür ve sistemin çözümü
olarak elde edilir [ 5].
Eğer dx(t ) / dt A t x t
(8)
sisteminin
2. YENİ
BİR
ÇÖZÜLEBİLİR
ZAMANLA DEĞİŞEN DOĞRUSAL
SİSTEM SINIFI (HG SINIFI)
öz
değerleri sabit değil ise, öz değerler arasında var
olabilecek başka ilişkiler dönüşüm matrisinin
bulunmasına yardımcı olabilir. Örneğin eğer
A(t)’nin öz değerleri herhangi bir zaman
fonksiyonunun katları ise bu sistemler için [Ah
sınıfı]
A1 A(t ) A(t ) A1
[ A(t )]' [h(t )]'
2
A(t )
h(t )
h (t )
Zamanla değişen sistemlerin matematiksel
modellemesinde kullanılan yaklaşım
dx(t )
At x t
dt
1 c1h(t ), 2 c2h(t ),...., n cn h(t )
şeklindedir. Bu sınıfa giren sistemlerin dönüşüm
matrisi
T (t ) e
t k 1 1 ve t k 1 1
(10)
(14)
şeklinde olduğunu varsayalım. Burada öz
değerlerin daha önce analitik çözümü tanımlanmış
A1 ve Ah sınıfı sistemler için gereken sabit olma ya
da bir fonksiyonun katı olma özelliğini taşımadığı
görülmektedir. Bu öz değerlerle tanımlanan ikinci
derece sistemin durum-uzay denklemi
olarak tanımlanır. Burada
t
g (t ) h( )d
(13)
eşitliğindeki A(t) matrisinin yapısını değiştirebilir
ancak sistemin karakteristik denklemini ve öz
değerlerini
değiştirmez.
A(t)’nin
yapısını
değiştiren kanonik gerçekleştirme yöntemleri ile
aynı öz değerler için A(t) değişik şekillerde
yazılabilir.
Zamanla değişen doğrusal sistemimizin ikinci
derece olduğunu ve öz değerlerinin
(9)
ilişkisini sağlayan sabit girdili bir A1 matrisi
bulmak mümkündür [6]. Bu ilişkide h(t) öz
değerlerin taban fonksiyonudur ve öz değerler
A1g ( t )
(12)
denklemini sağlaması beklenir. Burada, T(t) nxn
boyutlu dönüşüm matrisidir ve A(t) sistemini sabit
A sistemine taşımaktadır.[2]
x(t ) T (t ) z (t )
T (t ) (t , t0 ) z (t0 ) e A1t e At e A1t0 x(t0 )
dT (t )
dt
(11)
t0
olarak hesaplanmıştır ve bu dönüşümle zamanla
değişmeyen sisteme dönüştürülen sistemin
169
Fırat Üniversitesi-Elazığ
dx(t )
A(t ) x(t )
dt
t k 1 t
1
2
x(t )
k 1
(t 1) t t
dx1 (t ) / dt
dx (t ) / dt A(t ) x(t )
2
(15)
şeklinde yazılabilir. Bu sistemdeki A(t) matrisinin
girdileri
k’nıncı
dereceden
polinomlar
içermektedir. Ancak öz değerleri (14) eşitliğinde
verildiği gibidir. Bu sistemi (5) ilişkisi ile zamanla
değişmeyen doğrusal sisteme dönüştüren matrisi
olarak gerçekleştirildiğini
sistemin öz değerleri
varsayalım. Burada
2 2t 2 (t 4 1) 0
(22)
denklemini
sağlayan
t 1 ve t 1 olarak bulunur ve bu
sistem
karakteristik
tk
k
1 0
T (t ) e
t 1
2
(16)
olarak önerilmektedir. Bu dönüşüm A(t) sistemini,
her k için A sabit sistemine dönüştürmektedir ve
her k için
2
t3
3
1 0
T (t ) e
t 1
(23)
dönüşüm matrisi ile
0 1
A
0 0
(17)
olarak elde edilmektedir.
sisteminin çözümü
1 t
(t , t0 ) e A(t t )
0 1
0
(21)
t2 t
1 x1 (t )
2
2
(t 1) t t x2 (t )
dz (t )
Az (t )
dt
0 1
z (t )
0 0
dz (t ) / dt Az (t )
(18)
sabit katsayılı sisteme
sisteminin çözümü
olarak bulunur. Bu çözüme ters dönüşüm
uygulandığında başlangıç değerleri de hesaba
katılarak
x(t ) T (t ) (t , t0 )T 1 (t0 ) x(t0 )
dönüştürülebilir.
z (t ) e A(t t0 ) z (t0 )
A
(25)
olur ve ters dönüşüm uygulandığında A(t) sistemi
için çözüm
(19)
sonucu elde edilmektedir.
x(t ) T (t ) z (t )
2.1 Örnek
t3
3
ve z (t0 ) T 1 (t0 ) x(t0 )
t 1
1
x(t ) e
T (t0 ) x(t0 )
2
t t 1
İkinci derece zamanla değişen doğrusal sistemin
matematiksel denkleminin
d 2 y(t )
dy(t )
(2t 2 )
(t 4 1) y(t ) f (t )
2
dt
dt
(24)
(26)
olarak elde edilir.
(20)
3.
olduğunu ve sistemin durum-uzay tanımının
homojen karşılığının [f(t) = 0]
SONUÇ
Zamanla değişmeyen doğrusal sistemlerin
tümü için geçerli olan analitik çözüm yöntemi
mevcuttur. Ancak zamanla değişen doğrusal
sistemlerin tümü için geçerli olan genel bir analitik
çözüm tanımlanmamıştır. Bu nedenle, modellenen
170
Elektrik-Elektronik ve Bilgisayar Sempozyumu 2011
her zamanla değişen doğrusal sistem için farklı ve
o sisteme özel bir dönüşüm matrisinin bulunması
zorunluluğu vardır. Bulunan dönüşüm matrisi
sistemi zamanla değişmeyen bir sisteme
dönüştürebileceği gibi, analitik çözümü bilinen
sınıflardan birine de dönüştürebilir. Ancak ideal
olan bu dönüşüm ile sistemin kolay çözülebilen
sabit katsayılı bir sisteme dönüşebilmesidir.
Bu çalışma ile öz değerleri belli polinom
yapılarında olan sistemler için de uygun bir
dönüşüm matrisi ve analitik bir çözüm yöntemi
önerilmiştir. Dönüşüm matrisi sistemi zamanla
değişmeyen
doğrusal
bir
sisteme
dönüştürdüğünden, çözümün kolaylıkla elde
edilmesini sağlamaktadır.
4. KAYNAKLAR
[1] Bernard Kolman, David R. Hill “Elementary
Linear Algebra”, Pearson Prentice Hall, pp213-225, 2004
[2] MIN-YEN WU “Solution of certain classes of
linear time-varying systems”, International
Journal of Contro,Vol. 31, No.1, 11-20, 1980
[3] MIN-YEN WU “Solution of certain classes of
linear time-varying systems”, International
Journal of Contro,Vol. 31, No.1, 11-20, 1980
[4] C. Ray Wylie, Louis C. Barrett “Advanced
Engineering Mathematics”, McGrawhill, pp857-914, 1995
[5] MIN-YEN WU “Solution of certain classes of
linear time-varying systems”, International
Journal of Contro,Vol. 31, No.1, 11-20, 1980
[6] MIN-YEN WU “Solution of certain classes of
linear time-varying systems”, International
Journal of Contro,Vol. 31, No.1, 11-20, 1980
171