BÖLÜM-3
3.1
FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI
Bu bölümde periyodik titreşim hareketi yapan fiziksel sistemler incelenecektir.
Periyodik titreşim hareketi, denge konumu etrafında eşit zaman aralıklarında
kendini tekrarlayan harekettir. Titreşim hareketlerinin fiziksel temellerinin iyi
anlaşılması gerekir. İleriki konularda ele alacağımız dalga olaylarının temelinde
titreşim hareketi yapan fiziksel nicelikler olduğunu göreceğiz.
3.2
BASİT HARMONİK HAREKET (BHH)
En basit salınım hareketi, geri çağırıcı kuvvetin (𝐹) yer değiştirme (x) ile doğru
orantılı olduğu durumda görülür. Serbest uzunluğundan itibaren bir yayı x kadar
uzatıp (veya sıkıştırdığımızda) yay uzama (veya sıkışma) miktarı ile orantılı bir
kuvvet uygular. Bu kuvvet her zaman yayın uzamasına (veya sıkışmasına) zıt
yöndedir. Kuvvet-yer değiştirme ilişkisi Robert Hooke tarafından basit bir
şekilde ifade edilmiştir:
𝐹 = −𝑘𝑥
(3.1)
Bu ilişki ideal bir yay için geçerlidir ve Hook Yasası olarak adlandırılır. Eksi
işareti yayın uyguladığı kuvvetin geri çağırıcı olduğunu temsil eder. Burada k
orantı sabitine yay sabiti (veya kuvvet sabiti) denir. Yay sabiti her zaman
pozitiftir ve birimi SI-birim sisteminde N/m ile tanımlıdır.
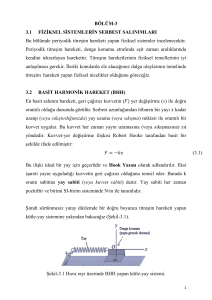
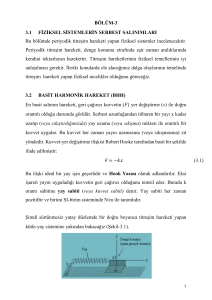
Şimdi sürtünmesiz yatay düzlemde bir doğru boyunca titreşim hareketi yapan
kütle-yay sistemine yakından bakacağız (Şekil-3.1).
Şekil-3.1 Hava rayı üzerinde BHH yapan kütle-yay sistemi.
1
3.2.1 Yatay doğrultuda kütle-yay sistemi
Şekil-3.2’deki kütle x kadar sağa doğru çekilip serbest bırakılısa, kütle denge
konumu etrafında salınım hareketi yapmaya başlar. Bu olayın sürtünmesiz hava
rayı üzerinde olduğunu kabul edelim.
Şekil-3.2.Yatay düzlemde kütle-yay sisteminin hareketi.
Şekildeki yayın Hook yasasına uyan bir yay olduğunu kabul edeceğiz. Bu
durumda geri çağırıcı kuvvet için için
𝐹 = −𝑘𝑥
(3.2a)
yazabiliriz. 2. Newton yasasından
𝐹 = 𝑚𝑎 = 𝑚
𝑑2𝑥
(3.2b)
𝑑𝑡 2
olacağını biliyoruz. Bu iki bağıntı kullanılarak
𝑚
veya
𝑑2𝑥
𝑑𝑡 2
𝑑2𝑥
𝑑𝑡 2
+ 𝑘𝑥 = 0
+
𝑘
𝑚
(3.3a)
𝑥=0
(3.3b)
𝑘
yazabiliriz. Burada ’nin değeri her zaman pozitif olduğu için 𝜔02 = 𝑘/𝑚
𝑚
olacak şekilde bir 0 niceliği tanımlayabiliriz. Bu durumda (3.3b) denklemi
𝑑2𝑥
+ 𝜔02 𝑥 = 0
olur. Bu, sürtünmesiz yatay düzlemde bir doğru boyunca titreşim hareketi yapan
𝑑𝑡 2
kütle-yay sisteminin hareket denklemidir.
2
(3.4)
3.2.2 Düşey doğrultuda kütle-yay sistemi
Şekil-3.3a’daki kuvvet sabiti k olan yayın ucuna kütlesi m olan bir cisim
bağlayalım.
Şekil-3.3 Düşey konumda kütle-yay sistemi.
Şekil-3.3b’de cisim denge konumundadır, bu konumda yay ∆𝑙 kadar uzamıştır.
Yayın cisim üzerinde yukarı doğru uyguladığı 𝑘∆𝑙 kuvveti, cismin ağırlığını
(𝑚𝑔) dengeleyecek kadardır yani
𝑘∆𝑙 = 𝑚𝑔
Denge noktasını 𝑥 = 0 ve pozitif x yönünü de yukarı doğru seçelim. Cisim
denge noktasının x kadar yukarısında olduğu zaman (Şekil-3.3c) yayın uzaması
∆𝑙 − 𝑥 kadardır. Yayın cisme uyguladığı yukarı doğru kuvvet 𝑘(∆𝑙 − 𝑥 )’dir.
Cisme etkiyen net (bileşke) kuvvet,
𝐹𝑛𝑒𝑡 = 𝑘(∆𝑙 − 𝑥 ) + (−𝑚𝑔) = −𝑘𝑥
olacaktır. 2.Newton yasasından
𝑑2𝑥
𝑚 2 + 𝑘𝑥 = 0
𝑑𝑡
yazabiliriz. Bu denklem, 𝜔02 = 𝑘/𝑚 seçilerek,
𝑑2𝑥
𝑑𝑡 2
+ 𝜔02 𝑥 = 0
(3.5)
formunda yazılabilir. Bu sonuç Eşitlik-3.4 ile aynıdır. Dolaysıyla sürtünmesiz
yatay doğrultudaki kütle-yay sistemi ile düşey doğrultudaki kütle-yay sisteminin
hareket denklemlerinin aynı olduğuna dikkat ediniz. Bu hareket denklemi sabit
katsayılı ikinci dereceden homojen bir diferansiyel denklemdir. Bu denklemin
3
çözümü için
𝑥 = 𝐶1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐶2 𝑠𝑖𝑛𝜔0 𝑡
(3.6a)
yazabiliriz. Burada 𝐶1 ve 𝐶2 sabitler olup, başlangıç koşullarından tayin edilir.
Bu denklemin çözümü için çoğu kez
𝑥 = 𝐴𝑐𝑜𝑠(𝜔0 𝑡 + )
(3.6b)
ifadesi kullanılır. Burada x uzanım, A genlik, 𝜔0 = √𝑘/𝑚 açısal frekans ve
faz sabitidir. Sonuç olarak her iki durumda da sistemin basit harmonik hareket
(BHH) yaptığı anlaşılır. Bu nedenle
𝑑2𝑥
+ 𝜔02 𝑥 = 0
2
𝑑𝑡
denklemi basit harmonik hareketi tanımlayan hareket denklemidir. İleride bu
denklem ve çözümü ile sık karşılaşacaksınız.
Şekil-3.4’de uzanımın (x), hızın (v) ve ivmenin (a) zamana bağlı değişimi
𝜑 = 0 özel durumu için verilmiştir.
Şekil-3.4.Uzanımın (𝑥), hızın(𝑣 = 𝑥̇ ) ve ivmenin (𝑎 = 𝑥̈ ) zamana (𝑡) bağlı
değişimi.
4
3.2.3 Yayların bağlanması
Mekanik sistemlerde yaylar sisteme paralel ve seri bağlanabilmektedir veya
bunların karışımı bağlantılar da yapmak mümkündür. Burada sadece iki yayın
paralel ve seri bağlanması verilecektir.
3.2.3.1 Paralel bağlı yaylar
Şekil-3.5 Paralel bağlı yaylar.
Şekil-3.5’deki paralel bağlı yaylar F kuvvetinin etkisinde eşit miktarda uzarlar
yani 𝑥1 = 𝑥2 = 𝑥 olacaktır. Bu durumda F kuvveti için
𝐹 = 𝑘1 𝑥1 + 𝑘2 𝑥2 = (𝑘1 + 𝑘2 )𝑥
(3.7)
yazabiliriz. Aynı zamanda F kuvveti için
𝐹 = 𝑘𝑒ş 𝑥
yazılabileceğinden
𝑘𝑒ş 𝑥 = (𝑘1 + 𝑘2 )𝑥
yazabiliriz. Buradan
𝑘𝑒ş = (𝑘1 + 𝑘2 )
(3.8a)
sonucunu elde ederiz. Benzer şekilde n tane yay paralel bağlanırsa eşdeğer yay
için
𝑘𝑒ş = ∑𝑛𝑖=1 𝑘𝑖
(3.8b)
ifadesini yazabiliriz. Yaylar paralel bağlandığında eşdeğer yay sabiti, yayların
her birinin yay sabitinden büyük olacağı açıktır.
5
3.2.3.2 Seri bağlı yaylar
Şekil-3.6 Seri bağlı yaylar.
Yayları uç uca eklediğimizde seri bağlamış oluruz (Şekil-3.6). Seri bağlı
yaylardaki toplam uzama miktarı, yayların tek tek uzamalarının toplamına eşit
olacaktır. Bu durumda toplam uzama için
𝑥 = 𝑥1 + 𝑥2
(3.9)
yazabiliriz. Tüm yaylara aynı F kuvveti etkidiği için
𝐹 = 𝑘1 𝑥1 = 𝑘2 𝑥2
olacaktır. Buradan
𝑥1 =
𝐹
𝑘1
ve 𝑥2 =
𝐹
𝑘2
yazabiliriz. Eşdeğer yay için ise
𝐹
𝐹
𝑥
𝑘𝑒ş
𝑘𝑒ş = veya 𝑥 =
yazılabilir. Bu değerler Eşitlik-9’da kullanırsa
1⁄𝑘𝑒ş = 1⁄𝑘1 + 1⁄𝑘2
(3.10a)
Sonucunu elde ederiz. Eğer n tane yay seri bağlanırsa eşdeğer yay sabiti için
1⁄𝑘𝑒ş = ∑𝑛𝑖=1
1
(3.10b)
𝑘𝑖
ifadesinin yazılacağı açıktır.
Sonuç olarak yayların bağlanmasının analizi kondansatörlerin bağlanmasındaki
analize benzediğine dikkat ediniz.
3.2.4 Basit harmonik harekette enerji
BHH yapan bir kütle yay sisteminin potansiyel ve kinetik enerjisi için
1
1
2
2
U = 𝑘𝑥 2 = 𝑘𝐴2 𝑐𝑜𝑠 2 (0 𝑡 + )
1
1
1
2
2
2
(3.11a)
K = 𝑚𝑣 2 = 𝑚𝜔02 𝐴2 𝑠𝑖𝑛2 (0 𝑡 + ) = 𝑘𝐴2 𝑠𝑖𝑛2 (0 𝑡 + )
(3.11b)
6
yazabiliriz. Bu ifadeler kullanılarak BHH yapan bir kütle yay sisteminin toplam
enerjisi (mekanik enerji) için
1
1
2
2
𝐸 = 𝑈 + 𝐾 = 𝑘𝑥 2 + 𝑚𝑣 2
(3.11c)
1
1
1
2
2
2
𝐸 = 𝑘𝐴2 𝑐𝑜𝑠 2 (0 𝑡 + ) + 𝑘𝐴2 𝑠𝑖𝑛2 (0 𝑡 + ) = 𝑘𝐴2
(3.11d)
ifadesini elde ederiz. Mekanik enerjinin sabit olduğuna dikkat ediniz.
Eşitlik-3.11c ve 3.11d kullanılarak
1 2 1
1
𝑘𝑥 + 𝑚𝑣 2 = 𝑘𝐴2
2
2
2
yazılabilir. Buradan herhangi bir t anındaki hız için,
𝑣 = ∓0 √𝐴2 − 𝑥 2
(3.12)
yazabiliriz. Cisim denge durumundan geçerken (x=0) en büyük hıza, dolayısıyla
en büyük kinetik enerjiye sahip olur. Cisim dönme noktalarında geçerken (x max
= ± A) ise en büyük potansiyel enerjiye sahip olur. Kinetik enerjinin maksimum
değeri potansiyel enerjinin maksimum değerine eşittir ve bu değer herhangi bir
andaki toplam enerjiye eşittir.
Cisim denge durumundan geçerken x = 0 olacağından, 𝑣𝑚𝑎𝑥 = 0 𝐴 elde edilir.
Bu durumda kinetik enerji de en büyük olacağından,
1
1
1
2
2
2
2
𝐾𝑚𝑎𝑥 = 𝑚𝑣𝑚𝑎𝑥
= 𝑚𝜔02 𝐴2 = 𝑘𝐴2
(3.13)
yazabiliriz. Sonuç olarak
1
1
2
2
𝐾𝑚𝑎𝑥 = 𝑈𝑚𝑎𝑥 = 𝐸 = 𝑘𝐴2 = 𝑚𝜔02 𝐴2 = 2𝜋 2 𝑚𝑓 2 𝐴2
(3.14)
yazabiliriz. Burada f normal frekanstır.
Yukarıda anlatılanları özetlemesi bakımından Şekil-3.7’da BHH’in kinetik (K)
ve potansiyel (U) enerjilerinin zamana ve konuma bağlı değişimi ortak eksende
gösterilmiştir. Cismin herhangi bir andaki kinetik ve potansiyel enerjilerinin
toplamı, maksimum kinetik enerjiye ve aynı zamanda maksimum potansiyel
enerjiye eşit olacaktır.
7
Şekil-3.7 Kinetik (K) ve potansiyel (U) enerjinin (a) zamana ve (b) yer
değiştirmeye bağlı değişimi.
3.2.5 Basit sarkaç
Bir ucundan tespit edilmiş ℓ uzunluğundaki hafif iplikle taşınan m kütleli
noktasal bir cismin oluşturduğu düzeneğe basit sarkaç denir (Şekil-3.8).
Şekil-3.8 Basit sarkaç.
Basit sarkaç denge konumundan küçük bir θ açısı kadar uzaklaştırılıp serbest
bırakılırsa düşey düzlemde periyodik salınımlar yapar. Kütleye etki eden geri
çağırıcı kuvvet
𝐹 = −𝑚𝑔𝑠𝑖𝑛𝜃
(3.15)
ifadesi ile verilir. Sinüs fonksiyonunun seriye açılımı
sinθ = θ −
θ3
3!
+
θ5
5!
−
θ7
7!
+⋯
(3.16)
dir. θ açısının küçük değerleri için sinθ ≅ θ alınabilir (Şekil-3.9).
8
Şekil-3.9 𝑦 = 𝑠𝑖𝑛𝜃 fonksiyonunun küçük 𝜃 değerlerinde 𝑦 = 𝜃’ye yaklaşımı.
Bu durumda F kuvveti için
𝐹 = −𝑚𝑔𝑠𝑖𝑛𝜃 ≅ −𝑚𝑔𝜃
(3.17a)
yazabiliriz. 2. Newton yasasından
𝐹 = 𝑚𝑎 = 𝑚
𝑑2𝑠
𝑑𝑡 2
=𝑚
𝑑2
𝑑2𝜃
𝑑𝑡
𝑑𝑡 2
(𝑙𝜃) = 𝑚𝑙
2
(3.17b)
ve buradan
𝑚𝑙
𝑑2𝜃
𝑑𝑡 2
= −𝑚𝑔𝜃
(3.17c)
veya
𝑑2𝜃
𝑑𝑡 2
yazabiliriz. Burada 𝜔02 =
𝑔
𝑙
𝑔
+ 𝜃=0
(3.17d)
+ 𝜔02 𝜃 = 0
(3.17e)
𝑙
alınarak,
𝑑2𝜃
𝑑𝑡 2
ifadesini elde ederiz. Bu ifade, matematiksel olarak, kütle-yay sistemi için elde
ettiğimiz BHH denklemi ile aynı formdadır. Bu denklemin çözümü için
𝜃 = 𝜃0 cos(𝜔0 𝑡 + )
(3.18a)
yazabiliriz. Burada açısal uzanım, 0 açısal genlik, faz sabiti ve 𝜔0 açısal
frekans’dır.
Hareketin periyodu ve frekansı için :
𝜔0 = √𝑔/𝑙 ,
𝑓=
1
2𝜋
√𝑔/𝑙
𝑣𝑒 𝑇 = 2𝜋√𝑙/𝑔
(3.18b)
ifadelerini yazabiliriz. Burada periyodun (veya frekans) kütleden bağımsız
olduğuna dikkat ediniz.
9
3.2.6 Basit Sarkacın Enerjisi
Şekil-3.10 Basit sarkaçta 𝜃 açısına karşı sarkaç kütlesinin yükselmesi.
Şekil-3.10’daki dik üçgenden
𝑥
𝑠𝑖𝑛𝜃 = veya, 𝑥 = 𝑙𝑠𝑖𝑛𝜃,
𝑙
θ açısının küçük olması halinde, Sinθ≈θ olup, 𝑥 ≅ 𝑙𝜃
𝑙 2 = (𝑙 − 𝑦)2 + 𝑥 2 = 𝑙 2 − 2𝑙𝑦 + 𝑦 2 + 𝑥 2
2𝑙𝑦 = 𝑦 2 + 𝑥 2
yazabiliriz. Küçük açılı salınımlar için 𝑦 ≪ 𝑙 olacağından 2𝑙𝑦 ≅ 𝑥 2 veya
𝑦=
𝑥2
2𝑙
alınabilir. Bu durumda:
Potansiyel enerji
𝑈 = 𝑚𝑔𝑦 = 𝑚𝑔
(3.19a)
2𝑙
1
𝐾 = 𝑚𝑣 2
Kinetik enerji
Mekanik enerji
𝑥2
(3.19b)
2
1
𝑥2
2
𝑙
𝐸 = 𝑈 + 𝐾 = 𝑚𝑔
1
+ 𝑚𝑣 2
(3.19c)
2
Mekanik enerjiyi maksimum potansiyel enerji cinsinden ifade edersek
1
𝐴2
2
𝑙
𝑈𝑚𝑎𝑥 = 𝑚𝑔
𝐸 = 𝑈𝑚𝑎𝑥 =
1
2
𝑚𝑔
𝐴2
𝑙
(3.19d)
1
𝑥2
2
𝑙
= 𝑚𝑔
1
+ 𝑚𝑣 2
(3.19e)
2
yazılabilir.
10
3.2.7 Burulma sarkacı
Şekil-3.11 Burulma sarkacı.
Küçük açılı burulmalarda geri çağırıcı tork için
𝜏 = −𝐾𝜃
(3.20a)
yazılabilir. Burada K, telin burulma sabitidir. Tork için 𝜏 = 𝐼𝛼 ifadesini
kullanırsak
𝜏 = 𝐼𝛼 = 𝐼
𝐼
𝑑2𝜃
𝑑𝑡 2
𝑑𝑡 2
= −𝐾𝜃
(3.20b)
+ 𝐾𝜃 = 0
(3.20c)
+ 𝜔02 𝜃 = 0
(3.20d)
𝑑𝑡 2
𝑑2𝜃
𝑑2𝜃
Burada 𝜔02 = 𝐾/𝐼 dir. Daha önce yaptığımız gibi bu denklemin çözümü için de
𝜃 = 𝜃𝑚 cos(0 𝑡 + 𝜑)
(3.21)
ifadesini yazabiliriz. Hareketin frekansı ve periyodu için
𝑓=
1
2𝜋
√𝐾/𝐼 ve 𝑇 = 2𝜋√𝐼/𝐾
(3.22)
ifadelerinin yazılacağı açıktır. Burada I, diskin eylemsizlik momentidir. Disk
düzlemine dik ve kütle merkezinden geçen eksene göre eylemsizlik momentinin
Ikm = (MR2)/2) ifadesi ile verildiğini biliyoruz. Burada M diskin kütlesi, R ise
yarıçapıdır.
11
3.2.8 Fiziksel sarkaç
Şekil-3.12 Fiziksel sarkaç.
Sarkaca etkiyen tork için
𝜏 = −(𝑚𝑔𝑠𝑖𝑛𝜃)𝑙/2
ifadesi yazılabilir. Aynı zamanda tork için
𝜏 = 𝐼𝛼 = 𝐼
𝑑2 𝜃
𝑑𝑡 2
yazabiliriz. Bu ikisinden
𝐼
𝑑2𝜃
+ (𝑚𝑔𝑙/2)𝑠𝑖𝑛𝜃 = 0
𝑑𝑡 2
ifadesi yazılır. Küçük açılı salınımlarda 𝑠𝑖𝑛𝜃 ≅ 𝜃 alınabileceği için sarkacın
hareket denklemi için
𝑑2𝜃
𝐼 2 + (𝑚𝑔𝑙/2)𝜃 = 0
𝑑𝑡
veya 𝜔02 = 𝑚𝑔𝑙/(2𝐼) alınarak
𝑑2𝜃
𝑑𝑡 2
+ 𝜔02 𝜃 = 0
(3.23)
elde edilir. Bu denklemin çözüm ise
𝜃 = 𝜃𝑚 cos(0 𝑡 + )
(3.24)
12
ifadesi ile verilebilir. Paralel eksen teoremini kullanarak sistemin eylemsizlik
momenti için
𝐼 = 𝐼𝑘𝑚 + 𝑚(𝑙 ⁄2
)2
𝑚𝑙 2
=
+ 𝑚(𝑙 ⁄2)2 = 𝑚𝑙 2 /3
12
ifadesini yazabiliriz. Bu değer 𝜔02 = 𝑚𝑔𝑙/(2𝐼) ifadesinde kullanılarak
sarkacın frekansı ve periyodu için
𝑓=
1
2𝜋
√
𝑚𝑔𝑙
2𝐼
, 𝑇 = 2𝜋√
2𝐼
𝑚𝑔𝑙
veya 𝑓 =
1
2𝜋
3𝑔
2𝑙
2𝑙
3𝑔
√ , 𝑇 = 2𝜋√
(3.25)
yazılır. Burada frekans ve periyodun kütleden bağımsız olduğuna dikkat ediniz.
3.2.9 Yüzen cisimlerin basit harmonik hareketi
Sıvıya daldırılmış bir cisim serbest bırakıldığında titreşim hareketi yapar (Şekil3.13).
Şekil-3.13 Sıvıya daldırılmış cisim. (a) Cisim yüzüyor. (b) Yüzen cisim üsten
hafifçe y kadar bastırılıyor.
m: yüzen cismin kütlesi
A: kesit alanı
: sıvının yoğunluğu
Ws : g (A.y) (yer değiştiren sıvının ağırlığı)
𝐹 = −𝑔(𝐴. 𝑦)
𝑑2𝑦
𝐹 = 𝑚𝑎 = 𝑚 2 = −𝜌𝑔(𝐴𝑦)
𝑑𝑡
𝑑2𝑦
𝑚 2 + (𝜌𝑔𝐴)𝑦 = 0
𝑑𝑡
13
veya 𝜔02 =
𝜌𝑔𝐴
𝑚
yazarak hareket denklemi için
𝑑2𝑦
𝑑𝑡 2
+ 𝜔02 𝑦 = 0
(3.26)
elde ederiz. Buradan periyot ve frekans için
𝑇 = 2𝜋√
𝑚
𝜌𝑔𝐴
ve 𝑓 =
1
2𝜋
√
𝜌𝑔𝐴
𝑚
ifadelerini yazabiliriz. Şekil-3.13a’da batan kısım h olduğundan Archimed ilkesi
gereği gAh = mg veya m=Ah yazabiliriz. Bu değeri periyot (veya frekans)
ifadesinde yerine yazarak;
ℎ
𝑇 = 2𝜋√ ve 𝑓 =
𝑔
1
𝑔
√
2𝜋 ℎ
(3.27)
elde ederiz. Burada frekans ve periyodun yüzen cismin kütlesinden bağımsız
olduğuna dikkat ediniz.
3.2.10 Elektrik Devrelerinde Osilasyonlar
İndüktans (L) ve kapasitans (C) içeren bir devre BHH salınım özellikleri
gösterir (Şekil-3.14). Bu tür devreleri deneysel olarak laboratuvar derslerinde de
inceleyeceksiniz.
Şekil-3.14 LC-devresi.
Bu kapalı devreye Kirchoff’un ilmek kuralını uygulayarak devre denklemi için
𝑞
𝐶
yazabiliriz.Akım için 𝑖 =
𝑑𝑞
𝑑𝑡
+𝐿
𝑑𝑖
𝑑𝑡
=0
(3.28)
yazarak devre denklemini
14
𝑑2𝑞
𝑑𝑡 2
şeklinde veya 𝜔02 =
1
𝐿𝐶
+
1
𝑞=0
(3.29)
+ 𝜔02 𝑞 = 0
(3.30)
𝐿𝐶
alınarak
𝑑2𝑞
𝑑𝑡 2
şeklinde yazabiliriz.
Bu denklem ile kütle-yay sisteminin hareket denkleminin matematik olarak aynı
olduğuna dikkat ediniz. Bu benzerlikten faydalanarak (3.30) denkleminin
çözümü için
𝑞 = 𝑞0 𝐶𝑜𝑠(0 𝑡 + )
(3.31)
ifadesini yazabiliriz. Bu çözüm kondansatör üzerindeki q yükünün periyodik
olarak salındığını söyler. Salınımın frekansı ve periyodu için ise
0 =
1
√𝐿𝐶
𝑓=
1
1
2𝜋 √𝐿𝐶
ve 𝑇 = 2𝜋√𝐿𝐶
(3.32)
ifadelerinin yazılabileceği açıktır.
3.2.11 LC devresi ile kütle-yay sistemi arasındaki benzerlikler
Yukarıdaki eşitliklerden hareketle elektriksel LC devresi ile kütle-yay
sisteminin
benzerlikleri
aşağıda
özetlenmiştir.
Bu
benzerlikleri
Fizik
Laboratuvarı-IV dersinde çok kullanacaksınız. Bu nedenle buradaki analizlerin
iyi anlaşılması gerekir.
xq
k
1
𝐶
mL
𝑘
1
𝑚
√𝐿𝐶
0 = √ 0 =
1
1
2
2
𝐸 = 𝑚𝑣 2 +
1
1 𝑞2
2
2 𝐶
𝑘𝑥 2 𝐸 = 𝐿𝑖 2 +
15
3.3. SÖNÜMLÜ HARMONİK HAREKET
Harmonik hareket yapan bir sistemin üzerine bir sürtünme kuvveti etki ederse
salınım genliği, sürtünme nedeniyle, küçülerek sıfır olur. Bu cins salınımlara
sönümlü harmonik hareket denir.
Şimdi sürtünme kuvveti gibi korunumsuz kuvvetlerin işe girmesiyle serbest
titreşim ifadelerinin nasıl değişikliğe uğradığını tartışacağız. Genellikle
sürtünme hava direncinden veya iç kuvvetlerden kaynaklanır. Salınan
sistemlerde sürtünme kuvveti çoğu kez hız ile orantılı olup, harekete zıt olarak
yönelmiştir.
Kütle-yay sistemini yeniden ele alalım. Şekil-3.15’de görüldüğü gibi yaya asılı
olan bir kütlenin salınım yaparken sıvı dolu bir kap içine batırıldığını
düşünelim. Bu kütle viskoz sıvı içinde hareket ederken enerjisini kaybetmeye
başlayacaktır, başka bir deyişle kütle sönümlü harmonik hareket yapacaktır.
Şekil-3.15 Viskoz ortamda kütle-yay sistemi.
Kabullenmelerimiz:
Potansiyel enerjinin tümünün, kütlesiz ve hiçbir sürtünme kuvvetinin
etkimediği ideal yayda toplandığı,
Kinetik enerjinin tümünün salınan m kütlesinde toplandığı,
Tüm ısı şeklindeki iç enerjinin, kabı dolduran viskoz sıvıda ortaya çıktığı
kabul edilecektir.
16
Sönümlü hareketin denklemi 2. Newton yasasından ( 𝑭 = 𝑚𝒂 ) elde edilir.
Kütleye etki eden F kuvveti, geri çağırıcı – 𝑘𝑥 şeklindeki kuvvet ile −𝑏
𝑑𝑥
𝑑𝑡
şeklindeki sürtünme kuvvetlerinin toplamıdır (Hareket tek boyutlu olduğundan
vektör gösterimi kullanılmadı). Burada b bir sabit olup sönüm kuvvetinin
büyüklüğünün bir ölçüsüdür.
Bu durumda hareket denklemini
𝑚𝑎 = −𝑘𝑥 − 𝑏
𝑑𝑥
(3.33)
𝑑𝑡
veya
𝑚
𝑑2𝑥
𝑑𝑥
𝑑𝑡
𝑑𝑡
+𝑏
2
+ 𝑘𝑥 = 0
(3.34)
şeklinde yazabiliriz. Bu denklem yeniden
𝑑2𝑥
𝑑𝑡 2
+
𝑏 𝑑𝑥
𝑚 𝑑𝑡
+
𝑘
𝑚
𝑥=0
(3.35)
şeklinde düzenlenebilir. Bu denklem çoğu kez
=
𝑏
𝑚
ve 20 =
𝑘
(3.36)
𝑚
kısaltmaları yapılarak
𝑑2𝑥
𝑑𝑡 2
+
𝑑𝑥
𝑑𝑡
+ 20 𝑥 = 0
(3.37)
şeklinde verilmektedir. Buradaki ve 20 nicelikleri gerçek ve pozitif sabit
sayılardır. Bu denklem sabit katsayılı, ikinci dereceden, homojen bir
diferansiyel denklemdir. Bu denklemin çözümü için
𝑥 = 𝑒 𝑟𝑡
(3.38)
formunda bir çözüm arayabiliriz (Bu türden denklemlerin çözümü için Calculus
and analytic geometry; George B. Thomas, Jr.” kitabına bakabilirsiniz.).
Burada r bir sabittir. Bu fonksiyonun t’ye göre birinci ve ikici türevleri alınarak
Eşitlik-3.37’de yerine yazılırsa
𝑑𝑥
𝑑𝑡
= 𝑟𝑒 𝑟𝑡 ve
𝑑2𝑥
𝑑𝑡 2
= 𝑟 2 𝑒 𝑟𝑡
17
(𝑟 2 + 𝑟 + 20 )𝑒 𝑟𝑡 = 0
(3.39)
elde edilir. 𝑒 𝑟𝑡 ≠ 0 olduğu için,
(𝑟 2 + 𝑟 + 20 ) = 0
(3.40)
olmak zorundadır. Bu denkleme karakteristik (veya yardımcı) denklem adı
verilir.
Bu karakteristik denklemin iki kökü vardır. Bu kökler,
1
𝑟1 = (− + √2 − 420 )
2
(3.41)
1
𝑟2 = (− − √2 − 420 )
2
dir. Burada = 2 − 420 değerine diskriminant dendiğini
(3.42)
biliyoruz.
Diskriminantın değerine göre bu denklemin çözümünde üç farklı durum söz
konusudur:
1. = 2 − 420 > 0
(3.43a)
2. = 2 − 420 = 0
(3.43b)
3. = 2 − 420 < 0
(3.43c)
Şimdi bu üç duruma daha yakından bakalım.
1. Durum : = 2 − 420 > 0,
Bu özel durum kritik üstü sönüm (over-damped) olarak adlandırılır. Bu
durumda 𝑟1 ve 𝑟2 gibi iki gerçek (reel) kök vardır. Bu nedenle (3.37)
denkleminin
𝑥1 = 𝐶1 𝑒 𝑟 1𝑡 ve 𝑥2 = 𝐶2 𝑒 𝑟 2𝑡
(3.44)
gibi iki farklı çözümü olacaktır. Çizgisel denklemlerin iki kökünün toplamı da
bir çözüm olduğundan
𝑥 = 𝐶1 𝑒 𝑟 1𝑡 + 𝐶2 𝑒 𝑟 2𝑡
(3.45)
şeklindeki kombinasyonun da bir çözüm olacağı açıktır. Burada √2 − 420 =
18
diyelim. Bu durumda 𝑟1 ve 𝑟2 kökleri için
1
1
1
1
2
2
2
2
𝑟1 = − 𝛾 + ve 𝑟2 = − 𝛾 −
(3.46)
yazabiliriz. Bu durumda (3.45) ile verilen çözüm
1
1
1
𝑥 = 𝑒 − 2𝛾𝑡 [𝐶1 𝑒 2𝑡 + 𝐶2 𝑒 − 2𝑡 ]
(3.47)
şeklini alır. Buradaki 𝐶1 ve 𝐶2 katsayıları hareketin başlangıç koşullarından
belirlenebilir. Bu koşulda ( 2 − 420 > 0 𝑣𝑒𝑦𝑎 𝑏2 > 4𝑘𝑚) hareket zamanla
üstel olarak söner ve cisim denge konumunda durur. Bu durumda hareketin
salınımlı olmadığına dikkat ediniz.
2. Durum : = 2 − 420 = 0
Bu özel durum kritik sönüm (critical-damped) olarak adlandırılır. Bu durumda
gerçek (reel) eşit iki kök vardır:
1
𝑟1 = 𝑟2 = 𝑟 = − 𝛾
(3.48)
2
Köklerin eşit olması durumunda (3.37) denkleminin çözümü için
𝑥 = 𝐶1 𝑒 𝑟𝑡 + 𝐶2 𝑡𝑒 𝑟𝑡 = (𝐶1 + 𝐶2 𝑡)𝑒 𝑟𝑡
𝛾
𝑥 = (𝐶1 + 𝐶2 𝑡)𝑒 − 2𝑡
(3.49)
yazabiliriz. Buradaki 𝐶1 ve 𝐶2 sabitleri başlangıç koşullarından elde edilir.
Zaman ilerledikçe 𝑥 ’in değeri sıfıra yaklaşır. Bu özel durumda da hareket
salınımlı değildir. En çabuk sönüm bu durumda elde edilir.
3. Durum : = 2 − 420 < 0
Bu durum kritik altı sönümlü harmonik hareket olarak adlandırılır. Bu
2
2
1
durumda sanal iki kök vardır. Bu kökler, 𝜆 = √420 − = √20 − olmak
2
4
üzere
1
𝑟1 = − + 𝑖𝜆
(3.50)
2
1
𝑟2 = − − 𝑖𝜆
(3.51)
2
19
şeklinde ifade edilebilir. Burada 𝑟1 ve 𝑟2 birbirinin kompleks eşleniği olduğuna
dikkat ediniz. Bu durumda (3.37) denkleminin çözümü için
1
𝑥 = 𝑒 − 2𝛾𝑡 [𝑐1 𝑒 iλ𝑡 + 𝑐2 𝑒 − iλ𝑡 ]
yazılabilir. Burada
𝑒 iλ𝑡 = 𝑐𝑜𝑠λ𝑡 + 𝑖𝑠𝑖𝑛λ𝑡
𝑒 −iλ𝑡 = 𝑐𝑜𝑠λ𝑡 − 𝑖𝑠𝑖𝑛λ𝑡
olduğu hatırlanırsa
1
𝑥 = 𝑒 − 2𝛾𝑡 [(𝑐1 + 𝑐2 ) 𝑐𝑜𝑠λ𝑡 + i(𝑐1 − 𝑐2 )𝑠𝑖𝑛λ𝑡]
yazılabilir. Son olarak
𝐶1 = (𝑐1 + 𝑐2 ) ve 𝐶2 = 𝑖(𝑐1 − 𝑐2 )
alırsak çözüm için
𝑥=𝑒
2
− 𝑡
(𝐶1 𝑐𝑜𝑠𝜆𝑡 + 𝐶2 𝑠𝑖𝑛𝜆𝑡)
(3.52)
yazabiliriz. Buradaki 𝐶1 ve 𝐶2 sabitleri 𝑐1 ve 𝑐2 sabitlerinin
1
1
𝑐1 = 2(𝐶1 − 𝑖𝐶2 ) ve 𝑐2 = 2(𝐶1 + 𝑖 𝐶2 )
şeklinde
birbirlerinin
kompleks
(karmaşık)
eşleniği
olması
koşuluyla
gerçeldirler (Burada küçük harf c’ler ile Büyük harf C’lerin farklı olduğuna
dikkat ediniz). Sonuç olarak (3.52) ile verilen çözümü, karakteristik denklemin
köklerinin birbirinin karmaşık eşleniği olduğu problemleri çözmek için
kullanabiliriz.
Bu ifadeyi sadece kosinüs veya sinüs fonksiyonu şeklinde yazmak sonuçları
daha kolay yorumlamamızı sağlayacaktır. Bunun için,
𝐶1 = 𝐴0 𝑠𝑖𝑛 ve 𝐶2 = 𝐴0 𝑐𝑜𝑠
(3.53)
şeklinde bir seçim yapabiliriz. Buradaki 𝐴0 ve de birer sabittir. Buradan
𝐶12 + 𝐶22 = 𝐴20 𝑠𝑖𝑛2 + 𝐴20 𝑐𝑜𝑠 2 = 𝐴20 (𝑠𝑖𝑛2 + 𝑐𝑜𝑠 2 ) = 𝐴20
(3.54)
ve aynı zamanda
𝐶1
𝐶2
=
𝐴0 𝑠𝑖𝑛
𝐴0 𝑐𝑜𝑠
= 𝑡𝑎𝑛
(3.55)
20
yazabiliriz. Bu durumda (3.52) eşitliği ile verilen çözümdeki 𝐶1 ve 𝐶2
sabitlerinden 𝐴0 ve sabitlerine geçebiliriz:
𝑥 = 𝑒 − 2𝑡 (𝐶1 𝑠𝑖𝑛𝜆𝑡 + 𝐶2 𝑐𝑜𝑠𝜆𝑡) = 𝐴0 𝑒 − 2𝑡 (𝑠𝑖𝑛𝑠𝑖𝑛𝜆𝑡 + 𝑐𝑜𝑠𝑐𝑜𝑠𝜆𝑡)
𝑥 = 𝐴0 𝑒 − 2𝑡 cos(𝜆𝑡 − )
Elde edilir. Burada 𝜆 = √20 −
2
4
(3.56)
değeri kullanılarak
𝑥 = 𝐴0 𝑒 − 2𝑡 cos(√20 −
2
4
𝑡 − )
(3.57)
sonucunu yazabiliriz. Bu çözümden, cismin harmonik titreşim hareketi yaptığı,
fakat genliğin zaman içinde üstel olarak azaldığı görülür. Başka bir deyişle
yitirici kuvvetler nedeniyle hareketin enerjisi korunmaz.
Bu çözümden hareketin periyodu (T) ve frekansı (f) için
𝑇=
4𝑚
√4𝑘𝑚−𝑏2
ve 𝑓 =
√4𝑘𝑚−𝑏2
(3.58a)
4𝑚
ifadelerini yazmak zor değildir. Eğer b=0 olursa (sönüm kuvveti yoksa) (3.58a)
ifadesi ile verilen periyot ve frekans değerleri
𝑚
1
𝑘
2𝜋
𝑇 = 2𝜋√ ve 𝑓 =
√
𝑘
(3.58b)
𝑚
olur. Bu özel durumun daha önce incelediğimiz BHH örneğine denk geldiğine
dikkat ediniz.
Bu tartışmaların ışığında aşağıdaki özetlemeyi yapabiliriz:
𝛾=
𝑏
𝑚
niceliği salınım genliğinin zamanla ne kadar çabuk sönüme
gittiğinin bir ölçüsüdür.
𝑡𝐿 =
2𝑚
𝑏
niceliği salınımın başlangıç genliğinin 1/𝑒 ’sine düşmesi için
geçen süredir. Bu 𝑡𝐿 süresi salınımların ortalama ömrü olarak
adlandırılır.
21
Eşitlik-3.57’de
verilen 𝑥 = 𝐴0 𝑒 − 2𝑡 cos(√20 −
2
4
𝑡 − ) fonksiyonun
grafiği aşağıda verilmiştir (Şekil-3.16)
Şekil-3.16 Sönümlü harmonik hareket (Grafik = 0 seçilerek çizilmiştir.).
Bu şekilde 𝐴𝑛 ve 𝐴𝑛+1 ardışık iki genliği göstermektedir. Buralarda çözüm
fonksiyonundaki kosinüs çarpanı 1’e eşit olur. Bu durumda ardışık iki genliğin
oranı
𝐴𝑛
𝐴𝑛+1
=
𝛾
𝑡
2 𝑛
𝛾
− 𝑡
𝐴0 𝑒 2 𝑛+1
𝐴0 𝑒
−
𝛾
𝛾𝑇
= 𝑒 2(𝑡𝑛+1−𝑡𝑛) = 𝑒 2
(3.59a)
olur. Her iki tarafın doğal logaritmasını alalınarak
𝐿𝑛(
𝐴𝑛
𝐴𝑛+1
) =
γT
(3.59b)
2
yazılabilir. Bu değere logaritmik azalma (decrement) denir ve genellikle 𝛿
sembolü ile gösterilir. Logaritmik azalma, genliğin azalmasının bir ölçüsüdür.
𝛿 = 𝐿𝑛(
𝐴𝑛
𝐴𝑛+1
) =
𝛾𝑇
2
=
𝑏𝑇
(3.60)
2𝑚
Yukarıda tanımlanan üç farklı sönümlü hareket aşağıdaki grafikte (Şekil-3.17)
bir arada gösterilmiştir.
22
Şekil-3.17 Kiritik, kritik üstü ve kritik altı sönümlü hareket.
Eşitlik-3.57 ile verilen çözüme tekrar dönelim ve
√20 −
𝑏2
4𝑚2
=
(3.61a)
diyelim. Bu durumda çözüm için
𝑏𝑡
𝑥(𝑡) = 𝐴0 𝑒 − 2𝑚 𝑐𝑜𝑠√20 −
𝑏2
4𝑚
𝑏𝑡
𝑡 = 𝐴0 𝑒 − 2𝑚 𝑐𝑜𝑠𝑡
2
(3.61b)
ifadesini yazabiliriz (Burada işlemlerin basitliği açısından = 0 seçilmiştir).
Sönüm sabiti b arttıkça değeri azalır, dolayısıyla hareketin periyodu artar.
Eğer 𝑏 2 = 4𝑚𝑘 = 4𝑚2 20 olursa, = 0 olur. Bu durumda sönüm sabiti bk
ile gösterilir. 𝑏𝑘 = √4𝑚𝑘 olduğunda sistem kritik sönümlüdür.
b>bk olduğunda ise sönümün şiddeti, herhangi bir salınım olmaksızın sistemi
denge durumuna döndürecek kadar büyüktür. İlk yer değiştirmenin ardından
kütle denge noktasından en fazla bir kez geçer.
b<bk olduğunda genlik azalmakla birlikte, sistem salınım hareketi yapar.
Buna kritik altı sönüm denir.
Birçok sistemdeki salınım hareketi dikkate alındığında (saatlerde olduğu gibi),
sönümün çok küçük hale getirilmesine ihtiyaç vardır. Araba yaylarında olduğu
gibi yeterli miktarda bir sönüm (kritik sönüm) tercih edilir. Amerika’da ve bazı
diğer ülkelerde yeni yapılan büyük binalar, deprem hasarını azaltmak için,
devasa boyutlu sönüm sistemlerinin üzerine yapılmaya başlanılmıştır.
23
3.3.1. Sönümlü harmonik harekette enerji kayıp oranı
Sönümlü harmonik hareketin enerjisi sürtünme gibi yitirici kuvvetler nedeniyle
azalır. Enerjinin azalması genliğin azalmasına neden olur. Sistemin toplam
mekanik enerjisi E,
1
1
2
2
𝐸 = 𝐾 + 𝑈 = 𝑚𝑣 2 + 𝑘𝑥 2
(3.63)
dir. Kritik altı sönümlü sönümlü harmonik hareketin uzanımının
𝑥(𝑡) = 𝐴0 𝑒
−
𝑏𝑡
2𝑚
𝑐𝑜𝑠√20
−
2 ⁄4 𝑡
= 𝐴0 𝑒
−
𝑡
2
𝑐𝑜𝑠𝑡
ifadesi ile verildiğini hatırlayınız.
Burada 2 ≪ 420 özel durumunu ele alalım. Bu durumda
2 = 20 −
2
4
eşitliğinden yaklaşık ≅ 0 yazılabilir. Bu durumda 𝑥(𝑡) için
𝑡
𝑥(𝑡) = 𝐴0 𝑒 − 2 𝑐𝑜𝑠0 𝑡
(3.64)
yazabiliriz. Buradan 𝑣 hızı için
𝑣(𝑡) =
𝑑𝑥
𝑑𝑡
𝑡
𝑡
= −𝐴0 𝑒 − 2 𝑐𝑜𝑠 0 𝑡 − 𝐴0 0 𝑒 − 2 𝑠𝑖𝑛 0 𝑡
(3.65)
2
elde ederiz. ≪ 0 olduğu kabul edildiğine göre, hız ifadesindeki ilk terim
ihmal edilerek,
𝑡
𝑣(𝑡) = −𝐴0 0 𝑒 − 2 sin 0 𝑡
(3.66)
yazılabilir. Bu hız değeri toplam enerji ifadesinde (Eşitlik-3.63) yerine
konulursa,
𝑡
1
2
1
t
2
𝐸 = 𝑚 (−𝐴0 0 𝑒 − 2 sin 0 𝑡) + 𝑘 (𝐴0 e− 2 cos0 𝑡)
2
2
1
1
2
2
= 𝑚𝐴20 20 𝑒 −𝑡 sin2 0 𝑡 + 𝑘𝐴20 𝑒 −𝑡 cos 2 0 𝑡
1
= 𝐴20 𝑒 −𝑡 [𝑚20 sin2 0 𝑡 + 𝑘 cos 2 0 𝑡]
2
24
elde edilir. 0 =
𝑘
𝑚
olduğuna göre, mekanik enerji için
1
𝑘
𝐸 = 𝐴20 𝑒 −𝑡 [𝑚 sin2 (0 𝑡) + 𝑘 cos 2 (0 𝑡)] =
2
𝑚
1 2 −𝑡
1
𝑘𝐴0 𝑒 [sin2 (0 𝑡) + cos 2 (0 𝑡)] = 𝑘𝐴20 𝑒 −𝑡
2
2
veya
𝐸 = 𝐸0 𝑒 −𝑡
(3.67)
1
sonucunu elde ederiz. Burada E0 =2 𝑘𝐴20 , t = 0 anındaki mekanik enerjidir.
Enerjinin ilk değerinin 1/e değerine düşmesi için geçen zamana sönüm zamanı
(decay time) veya zaman sabiti (time constant) denir ve ile gösterilir:
1
1
𝑏/𝑚
= =
=
𝑚
(3.68)
𝑏
Bu durumda enerji ifadesi
𝐸 = 𝐸0 𝑒 − 𝑡/
(3.69)
şeklinde yazılabilir. Mekanik enerjinin zamanla değişimi Şekil-3.19’de verilen
grafikte verilmiştir.
Şekil-3.19 Sönümlü harekette enerjinin zamana bağlı değişimi.
Sönümü
𝑄=
0
(3.62)
𝛾
ifadesiyle tanımlı Q parametresi ile de yorumlayabiliriz. Q’nin büyük değerleri
yavaş sönümlere karşı gelir. Q’ye kalite faktörü denmektedir. Q>1 olduğunda
kritik altı sönümlü harmonik hareket koşulu geçerlidir. Çeşitli Q değerleri için
uzanımın (x) zamanla (t) değişimi Şekil-3.18’de verilmiştir.
25
Şekil-3.18 Sönümlü harmonik hareketin Q kalite faktörüne bağlı değişimi.
Aşağıdaki çizelgede çeşitli sönümlü salınıcı sistemlere ait Q değerlerinin
yaklaşık değerleri verilmiştir.
Sönümlü salınıcı sistem
Saat sarkacı
Elektriksel RLC devreleri
Titreşen piyano teli
Mikrodalga kavite osilatörü
Kuartz kristali
Q değeri
75
200
103
104
106
3.3.2 Enerjinin değişim hızı
Enerjinin değişim hızı, enerjinin zamana göre türevi ile tanımlanır. Mekanik
enerjin zamana türevi alınarak
𝑑𝐸
𝑑𝑡
=
𝑑
1
1
𝑑𝑣
𝑑𝑥
𝑑𝑣
( 𝑚𝑣 2 + 2 𝑘𝑥 2 ) = 𝑚𝑣 𝑑𝑡 + 𝑘𝑥 𝑑𝑡 = 𝑚𝑣 𝑑𝑡 + 𝑘𝑥𝑣 = (𝑚𝑎 + 𝑘𝑥)𝑣
𝑑𝑡 2
(3.70)
yazılabilir. Hareket denkleminin
𝑚𝑎 + 𝑏𝑣 + 𝑘𝑥 = 0
ifadesi ile verildiğini hatırlarsak
𝑚𝑎 + 𝑘𝑥 = −𝑏𝑣
yazabiliriz. Bu ifade (3.70) eşitliğinde kullanılırsa
𝑑𝐸(𝑡)
𝑑𝑡
elde edilir. Bu bağıntı da,
= (𝑚𝑎 + 𝑘𝑥)𝑣 = −𝑏𝑣 2 < 0
𝑑𝐸(𝑡)
𝑑𝑡
(3.71)
< 0 olduğundan, enerjin sürekli azaldığını
26
gösterir. Eşitlik-3.69 ile verilen
𝐸(𝑡) = 𝐸0 𝑒 −𝑡
ifadesini yeniden ele alalım. Bu enerjinin 𝑡1 ve t2=t1+T anındaki (yani bir
periyot sonra) değerleri için
𝐸1 = 𝐸0 𝑒 −𝑡1
(3.72a)
𝐸2 = 𝐸0 𝑒 −(𝑡1+𝑇)
(3.72b)
ifadelerini yazabiliriz. Burada
𝑥2 𝑥3
𝑒 =1+𝑥+ + +⋯
2! 3!
𝑥
serisinden faydalanarak 𝑥 ≪ 1 durumunda 𝑒 𝑥 değeri için
𝑒𝑥 ≅ 1 + 𝑥
yazabiliriz. Buradan hareketle t2 ve t1 anındaki enerjilerin oranı için
𝐸2
𝐸1
=
𝑒 −(𝑡1+𝑇)
𝑒 −𝑡1
= 𝑒 −𝑇 ≅ 1 − 𝑇
(𝑇 ≪ 1)
(3.73)
sonucunu elde ederiz. Buradan enerji farkları için
𝐸1 − 𝐸2 = 𝐸1 − 𝐸1 (1 − 𝑇) = 𝑇 𝐸1
(3.74)
ifadesini yazabiliriz. Enerji değişiminin ilk enerjiye oranı için ise
𝐸1 −𝐸2
𝐸1
= 𝑇 =
2𝜋
0
=
2𝜋
0 ⁄
=
2𝜋
0 ⁄(𝑏/𝑚)
=
2𝜋
𝑚0 ⁄𝑏
=
2𝜋
𝑄
ifadesi yazılabilir (𝑄 = 𝑚0 ⁄𝑏). Buradan Q kalite faktörü için
𝑄=
𝐸1
(𝐸1 −𝐸2 )/(2𝜋)
=
𝑜𝑠𝑖𝑙𝑎𝑡ö𝑟𝑑𝑒 𝑑𝑒𝑝𝑜𝑙𝑎𝑛𝑎𝑛 𝑒𝑛𝑒𝑟𝑗𝑖
(3.75)
𝑟𝑎𝑑𝑦𝑎𝑛 𝑏𝑎ş𝚤𝑛𝑎 𝑒𝑛𝑒𝑟𝑗𝑖𝑑𝑒𝑘𝑖 𝑘𝑎𝑦𝚤𝑝
ifadesini yazılabilir. Bu ifadenin Q kalite faktörü için yeni bir tanımlama verir.
Şimdi
2 = 20 −
2
4
ifadesini yeniden
2 = 20 −
2
4
= 20 −
(𝑏⁄𝑚)2
4
1
2
1
= 20 − ( 0 ) = 20 (1 − 2)
4 𝑄
4𝑄
27
= 0 (1 −
1
1/2
)
4𝑄2
(3.76)
şeklinde ifade edebiliriz. Bu ifade Q’nun büyük değerlerinde ≅ 0 almamızı
haklı kılar. Örneğin,
Q=2 için,
= 0 (1 −
1
1/2
)
4×22
= 0 (1 −
1 1/2
)
16
= 0 (1 − 0.01)1/2 ≅ 0.9680
Q=10 için,
= 0 (1 −
1
1/2
)
4×102
= 0 (1 −
1
1/2
)
400
≅ 0.9990
dir. Q büyüdükçe değeri 0 değerine yaklaşmaktadır. Başka bir deyişle b
sönüm faktörü azaldıkça Q’nin değeri artar ve sönümlü harmonik hareketin
frekansı BHH’in 0 frekansına yaklaşır (Şekil-3.20).
Şekil-3.20 Sönümlü harmonik hareketin frekansının Q kalite faktörüne bağlı
değişimi.
3.4
SÖNÜMLÜ ELEKTRİKSEL OSİLASYONLAR
Daha önce bir LC devresindeki osilasyonları incelemiştik. Bu devrenin BHH
salınımı yaptığını görmüştük. Şimdi devreye bir R direnci ekleyeceğiz (Şekil3.21).
28
Şekil-3.21 LRC devresi.
Devredeki C kondansatörü VC voltajı ile yüklendiğinde, kondansatör üzerinde q
yükü depolanacaktır. Kondansatörün levhaları arasındaki potasiyel fark için
𝑉𝐶 =
𝑞
(3.77)
𝐶
yazılacağını biliyorsunuz. Daha sonra S anahtarı kapatılırsa, devreden i akımı
geçmeye başlayacaktır. Kirchoff’un ilmek kuralını kullanarak devre denklemi
için
𝐿
𝑑𝑖
𝑑𝑡
𝑞
+ 𝑅𝑖 + = 0
(3.78)
𝐶
ifadesini yazabiliriz. Burada
𝑖=
𝑑𝑞
𝑑𝑡
𝑣𝑒
𝑑𝑖
𝑑𝑡
=
𝑑2𝑞
(3.79)
𝑑𝑡 2
eşitlikleri yerine konulursa,
𝐿
𝑑2𝑞
𝑑𝑡 2
+𝑅
𝑑𝑞
𝑑𝑡
𝑞
+ =0
(3.80)
𝐶
denklemi elde edilir. Bu denklem sönümlü harmonik hareketin
𝑚
𝑑2𝑥
𝑑𝑡 2
+𝑏
𝑑𝑥
𝑑𝑡
+ 𝑘𝑥 = 0
denklemi ile aynıdır. Bu iki denklem karşılaştırıldığında, mekanik sistemdeki
büyüklükler ile RLC elektrik devresindeki büyüklükler arasında benzerlikler
aşağıda verilmiştir.
29
Mekanik Elektrik
sistemi
Sistemi
x
Q
m
L
k
1/C
b
R
= b/m
= R/L
Bu benzetişimden yararlanarak devre denkleminin çözümü için
𝑞 = 𝑞0 𝑒 − 𝑅𝑡/2𝐿 𝑐𝑜𝑠 [(
1
𝐿𝐶
−
𝑅 2 1/2
) 𝑡]
4𝐿2
(3.81)
yazabiliriz. Burada q0, kondansatörün başlangıçtaki yüküdür. Elektrik
devresinde kritik altı çözüm koşulunun 𝑅 2 <
4𝐿
𝐶
ile verileceği açıktır. Bu durum
kütle-yay sisteminde sönümlü harmonik hareketi incelerken yazdığımız
𝑏 2 < 4𝑘𝑚 koşuluna karşı gelmektedir. 𝑉𝐶 = 𝑞/𝐶 olduğu için
𝑉𝐶 =
𝑞0
𝐶
𝑒
−
𝑅
𝑡
2𝐿
cos [(
1
𝐿𝐶
1
−
𝑅
𝑅2 2
1
1/2
𝑅2
) 𝑡] = 𝑉0 𝑒 − 2𝐿𝑡 cos [(𝐿𝐶 − 4𝐿2 )
4𝐿2
𝑡]
(3.82)
yazabiliriz. Burada 𝑉0 , t=0 anındaki voltaj değeridir. Bu sistemin açısal frekansı
1
𝑅2
=
−
𝐿𝐶 4𝐿2
2
olacaktır.
𝑅2
4𝐿2
<
1
𝐿𝐶
koşulu sağlandığında sistem kritik altı sönüm durumunda
olacaktır yani sistem sönümlü harmonik hareket yapacaktır.
durumunda sistemin açısal frekansı için ≅ √
𝑅2
4𝐿2
>
1
1
𝐿𝐶
𝑅2
4𝐿2
≪
1
𝐿𝐶
alınabilir.
koşulu sağlandığında sistem kritik üstü sönüm durumunda
𝐿𝐶
olacaktır.
𝑅2
4𝐿2
=
1
𝐿𝐶
koşulu sağlandığında sistem kritik sönüm durumunda olacaktır.
30
Mekanik sistemde tanımladığımız Q kalite faktörünün karşılığının ise
𝑄=
0
1
𝐿
𝑅
𝐶
= √
(3.83)
olacağı açıktır. Q kalite faktörü kullanılarak mekanik ve elektrik sistemlerinde
sönümlü harmonik hareketin denklemi yeniden yazalım:
𝑑2𝑥
𝑑𝑡 2
𝑑2𝑞
𝑑𝑡 2
+
0 𝑑𝑥
+
0 𝑑𝑞
𝑄 𝑑𝑡
𝑄 𝑑𝑡
+ 20 𝑥 = 0
(3.84a)
+ 20 𝑞 = 0
(3.84b)
Bu benzerliği Fizik Laboratuvarı-IV dersinde yapacağınız deneylerde sık sık
kullanacaksınız.
31
Aşağıda konuyla ilgili bazı çözümlü problemler verilmiştir. Bu örnekleri
dikkatlice incelemenizi öneririz.
ÖRNEK-1
a) Kütlesi m olan bir cisim kuvvet sabiti k olan homojen bir yaya asılmıştır
(Şekil-a). Yay denge konumundan itibaren hafifçe (y kadar) aşağı doğru
çekilip serbest bırakılıyor. Sistemin titreşim periyodu nedir?
b) Kütlesi m olan cisim özdeş iki yaya Şekil-b’deki gibi bağlanmıştır. Bu
durumda titreşim periyodu nedir?
c) Kütlesi m olan cisim özdeş iki yaya Şekil-c’deki gibi bağlanmıştır. Bu
durumda titreşim periyodu nedir? (French-p3.1)
Çözüm:
a) Sisteme yaydan dolayı etki eden kuvvet F=-ky’e eşittir. Bu durumda
hareket denkleminin
𝑑2𝑦
𝑚 2 = −𝑘𝑦
𝑑𝑡
veya
𝑑2𝑦 𝑘
+ 𝑦=0
𝑑𝑡 2 𝑚
veya
𝑑2𝑦
+ 𝜔02 𝑦 = 0
𝑑𝑡 2
şeklinde yazılabileceğini biliyorsunuz. Burada 𝜔02 = 𝑘/𝑚 dir.
Buradan periyot için 𝜔0 =
2𝜋
𝑇
= √𝑘/𝑚 ⇒ 𝑇 = 2𝜋√𝑚/𝑘 yazılabilir.
32
b) b) Sisteme yaylardan dolayı etki eden kuvvet 𝐹 = −2𝑘𝑦’e eşittir (Paralel
bağlı yaylar). Bu durumda hareket denkleminin
𝑑2𝑦
𝑘
+
2
𝑦=0
𝑑𝑡 2
𝑚
veya
𝑑2𝑦
+ 𝜔12 𝑦 = 0
2
𝑑𝑡
Burada 𝜔1 = √2𝑘/𝑚 ve periyot 𝑇1 = 2𝜋√𝑚/2𝑘 olacaktır.
1
c) Sisteme yaylardan dolayı etki eden kuvvet 𝐹 = − 𝑘𝑦’e eşittir (Seri bağlı
2
yaylar). Bu durumda hareket denkleminin
𝑑2𝑦
𝑘
+
𝑦=0
𝑑𝑡 2 2𝑚
veya
𝑑2𝑦
+ 𝜔22 𝑦 = 0
2
𝑑𝑡
Burada 𝜔2 = √𝑘/2𝑚 ve periyot𝑇2 = 2𝜋√2𝑚/𝑘 olacaktır.
ÖRNEK-2
Bir platform düşey yönde saniyede 10/ titreşim ve 5 cm genlikle BHH
yapmaktadır. Küçük bir blok platform üzerine konuyor.
a) Blok hangi noktada platformu terk eder?
b) Blok, platformun ulaştığı en üst noktadan ne kadar yukarıya
yükselecektir? (French-p3.2)
Çözüm:
a) Sistem BHH yaptığı için
𝑦(𝑡) = 𝐴𝑠𝑖𝑛𝜔𝑡
yazabiliriz. Bu durumda sistemin ivmesi
33
𝑑2𝑦
𝑎𝑦 = 2 = −𝐴𝜔2 𝑠𝑖𝑛𝜔𝑡 = −𝜔2 𝑦
𝑑𝑡
olacaktır. Platformun ivmesi yer çekim ivmesine eşit olduğunda blok ile
platformun teması kesilir. Bu andaki konuma 𝑦0 diyelim.
𝜔2 𝑦0 = 𝑔 ⇒ 𝑦0 =
𝑔
𝑔
10
10
=
=
=
= 0,025 𝑚
𝜔 2 (2𝜋𝑓)2 (2𝜋10/𝜋)2 400
= 2,5 𝑐𝑚
b) Blokun platformdan ayrıldığı anda 𝑦0 =2,5 cm olacaktır. Bu anda
0,025 𝑚 = 0,05𝑠𝑖𝑛20𝑡
yazabiliriz. Buradan
𝑠𝑖𝑛20𝑡 =
0,025
𝜋
𝜋
= 0,5 ⇒ 20𝑡 = ⇒ 𝑡 =
𝑠
0,050
6
120
bulunur. Blokun platformdan ayrıldığı andaki hızına 𝑣0 diyelim,
𝑣 = 𝐴𝜔𝑐𝑜𝑠𝜔𝑡
Bağıntısı kullanılarak
𝑣0 = 0,05(20) cos (20
𝜋
𝜋
) ⇒ 𝑣0 = 𝑐𝑜𝑠 6 =
120
√3 𝑚
2 𝑠
elde
edilir.
Blok
platformdan ayrıldığı anda 𝑣0 hızı ile yukarı doğru atılmış cisim gibi
davranır. Konumun zamana bağlı değişiminin
1
𝑦 = 𝑦0 + 𝑣0 𝑡 − 𝑔𝑡 2
2
bağıntısı ile verildiğini biliyorsunuz. Blok en yüksek noktaya çıktığında
hızı sıfır olacaktır,
𝑣0
𝑣 = 𝑣0 − 𝑔𝑡 = 0 ⇒ 𝑡 =
𝑔
Bu durumda
𝑦 = 𝑦0 +
𝑣02
𝑔
−
1 𝑣02
2 𝑔
= 𝑦0 +
𝑣02
2𝑔
sonucu elde edilir ve buradan blokun çıkabileceği en yüksek noktanın
koordinatı için
3/4
𝑦 = 0,025 +
= 0,0625 𝑚 = 6,25 𝑐𝑚
20
değeri bulunur. Platformun çıkabileceği yükseklik en fazla A=0,05 m = 5
cm genliği kadar olur. Bu durumda blok en yüksek noktaya ulaştığında
platform ile arasındaki mesafe ise 6,25-5,00=1,25 cm olur.
34
ÖRNEK-3
Uzunluğu L olan homojen bir çubuk belli bir amaç için uzunluğunun
2/3’ünden şekildeki gibi asılmış halde iken titreşim hareketi yapmaktadır.
Çubuğun küçük titreşimlerinin periyodunu bulunuz. (French-p3.3)
Çözüm:
Problemin çözümüne uygun bir şekil aşağıda verilmiştir.
L/3
d
K
F=mgsin
F=mgcos
mg
Şekilde KM’nin asılma noktasına uzaklığı d ile gösterilmiştir. Bu şekilden
𝑑=
𝐿 𝐿 𝐿
− =
2 3 6
yazabiliriz. Çubuğun ağırlığı KM’ine etkir. Bu kuvvetin çubağa dik bileşeni
olan 𝐹 = 𝑚𝑔𝑠𝑖𝑛𝜃 kuvveti çubuğu döndürmeye çalışacaktır. Bu kuvvetin
uyguladığı tork (𝜏) için
𝐿
6
olacaktır. Burada eksi işareti torkun geri çağırıcı olduğu anlamındadır. Dönen
𝜏 = −𝐹𝑑 = −𝑚𝑔𝑠𝑖𝑛𝜃𝑑 = −𝑚𝑔𝑠𝑖𝑛𝜃
cisimleri incelerken tork ile eylemsizlik momenti (I) arasındaki ilişkinin
𝜏 = 𝐼𝛼
bağıntısı ile verildiğini biliyorsunuz. Burada 𝛼 açısal ivmedir. Bu durumda tork
için
𝑑2𝜃
𝜏 = 𝐼𝛼 = 𝐼 2
𝑑𝑡
ifadesi yazılabilir.
35
𝑑2𝜃
𝐿
𝐼 2 = −𝑚𝑔𝑠𝑖𝑛𝜃
𝑑𝑡
6
veya
𝑑 2 𝜃 1 𝑚𝑔𝐿
+
𝑠𝑖𝑛𝜃 = 0
𝑑𝑡 2 6 𝐼
yazılabilir. Küçük titreşimlerde 𝑠𝑖𝑛𝜃 ≅ 𝜃 alınabilir ve bu durumda yukarıdaki
eşitlik
𝑑 2 𝜃 1 𝑚𝑔𝐿
+
𝜃=0
𝑑𝑡 2 6 𝐼
şeklinde yazılabilir. Burada
𝜔02 =
1 𝑚𝑔𝐿
6 𝐼
alınarak
𝑑2𝜃
+ 𝜔02 𝜃 = 0
2
𝑑𝑡
yazılabilir. Bu denklem daha önce incelediğimiz BHH’in denklemi ile aynıdır.
Buradan periyod için
6𝐼
𝑇 = 2𝜋√
𝑚𝑔𝐿
yazabiliriz. Bu çubuğun dönme eksenine göre eylemsizlik momentini paralel
eksen teoremini kullanarak
1
𝐿
1
𝑚𝐿2 + 𝑚( )2 = 𝑚𝐿2
12
6
9
yazılabilir. Bu değer yukarıda verilen periyot ifadesinde kullanılırsa
𝐼=
2𝐿
𝑇 = 2𝜋√
3𝑔
sonucu elde edilir. Periyodun kütlesinden bağımsız olduğuna dikkat ediniz.
36
ÖRNEK-4
Yarıçapı R ve kütlesi M olan homojen bir disk, uzunluğu L ve kütlesi m olan
homojen bir çubuğun ucuna bağlıdır. Çubuğun diğer ucu, sürtünmesiz bir mile
asılıdır. Bu sistemin küçük titreşimler yapması durumunda periyodunu bulunuz.
Çözüm:
Problemin çözümüne uygun bir şekil aşağıda verilmiştir.
𝑚𝑔𝑠𝑖𝑛𝜃 ve 𝑀𝑔𝑠𝑖𝑛𝜃 kuvvetleri sistemi P noktası etrafında döndürmeye
çalışacaktır. Geri çağırıcı tork için
𝐿
𝜏 = −𝑚𝑔𝑠𝑖𝑛𝜃 − 𝑀𝑔𝑠𝑖𝑛𝜃(𝑅 + 𝐿)
2
ifadesini yazabiliriz. Tork ile eylemsizlik momenti (I) arasındaki ilişkinin
𝜏 = 𝐼𝛼
bağıntısı ile verildiğini biliyorsunuz. Burada 𝛼 açısal ivmedir. Bu durumda tork
için
𝑑2𝜃
𝜏 = 𝐼𝛼 = 𝐼 2
𝑑𝑡
ifadesi yazılabilir. Buradan
𝑑2𝜃
𝐿
𝐼 2 = −𝑚𝑔𝑠𝑖𝑛𝜃 − 𝑀𝑔𝑠𝑖𝑛𝜃(𝑅 + 𝐿)
𝑑𝑡
2
yazılır. Küçük titreşimlerde 𝑠𝑖𝑛𝜃 ≅ 𝜃 alınabilir ve bu durumda yukarıdaki
eşitlik
𝑑2𝜃
𝐿
𝐼 2 = −𝑚𝑔 𝜃 − 𝑀𝑔(𝑅 + 𝐿)𝜃
𝑑𝑡
2
37
veya
1
𝑑 2 𝜃 [2 𝑚𝑔𝐿 + 𝑀𝑔(𝑅 + 𝐿)]
+
𝜃=0
𝑑𝑡 2
𝐼
Burada I eylemsizlik momenti için
1
1
3
2
𝐼ç𝑢𝑏𝑢𝑘 = 𝑚𝐿2 ve 𝐼𝑑𝑖𝑠𝑘 = 𝐼𝐾𝑀 + 𝑀(𝑅 + 𝐿)2 = 𝑀𝑅2 + 𝑀(𝑅 + 𝐿)2
1
1
𝐼 = 𝐼ç𝑢𝑏𝑢𝑘 + 𝐼𝑑𝑖𝑠𝑘 = 𝑚𝐿2 + 𝑀𝑅2 + 𝑀(𝑅 + 𝐿)2
3
2
ifadesini yazabiliriz. Bu durumda hareket denklemi
olacaktır. Burada
1
[2 𝑚𝑔𝐿 + 𝑀𝑔(𝑅 + 𝐿)]
𝑑2𝜃
+
𝜃=0
𝑑𝑡 2 [1 𝑚𝐿2 + 1 𝑀𝑅 2 + 𝑀(𝑅 + 𝐿)2 ]
3
2
alınabilir ve periyot için
1
2 𝑚𝑔𝐿 + 𝑀𝑔(𝑅 + 𝐿)
𝜔02 =
1 2 1
2
2
3 𝑚𝐿 + 2 𝑀𝑅 + 𝑀(𝑅 + 𝐿)
1 2 1
𝑚𝐿 + 𝑀𝑅 2 + 𝑀(𝑅 + 𝐿)2
3
2
𝑇 = 2𝜋√
1
2 𝑚𝑔𝐿 + 𝑀𝑔(𝑅 + 𝐿)
ifadesi yazılabilir.
38
ÖRNEK- 5
𝑥 = 𝐴𝑒 −𝛼𝑡 𝑐𝑜𝑠𝜔𝑡 ifadesinin,
𝑑2𝑥
𝑑𝑡 2
+𝛾
𝑑𝑥
𝑑𝑡
+ 𝜔02 𝑥 = 0 denkleminin bir çözümü
olabilmesi için sağlanması gereken koşulları belirleyiniz ve buradan 𝛼 ve 𝜔’yı
bulunuz.
Çözüm:
Verilen fonksiyonun çözüm olabilmesi için fonksiyonun
𝑑𝑥
𝑑𝑡
ve
𝑑2𝑥
𝑑𝑡 2
türevlerini
alarak verilen diferansiyel denklemde yerine yazdığımızda denklemi sağlaması
gerekir.
Birinci türev için
𝑑𝑥
= −𝐴𝛼𝑒 −𝛼𝑡 𝑐𝑜𝑠𝜔𝑡 − 𝐴𝜔𝑒 −𝛼𝑡 𝑠𝑖𝑛𝜔𝑡 = 𝐴𝑒 −𝛼𝑡 [−𝛼𝑐𝑜𝑠𝜔𝑡 − 𝜔𝑠𝑖𝑛𝜔𝑡]
𝑑𝑡
yazılabilir.
İkinci türev için ise
𝑑2𝑥
= −𝐴𝛼𝑒 −𝛼𝑡 [−𝛼𝑐𝑜𝑠𝜔𝑡 − 𝜔𝑠𝑖𝑛𝜔𝑡] + 𝐴𝑒 −𝛼𝑡 [𝛼𝜔𝑠𝑖𝑛𝜔𝑡 − 𝜔2 𝑐𝑜𝑠𝜔𝑡]
𝑑𝑡 2
veya
𝑑2𝑥
= 𝐴𝑒 −𝛼𝑡 [𝛼 2 𝑐𝑜𝑠𝜔𝑡 + 𝜔𝛼𝑠𝑖𝑛𝜔𝑡 + 𝛼𝜔𝑠𝑖𝑛𝜔𝑡 − 𝜔2 𝑐𝑜𝑠𝜔𝑡]
2
𝑑𝑡
veya
𝑑2𝑥
= 𝐴𝑒 −𝛼𝑡 [(𝛼 2 − 𝜔2 )𝑐𝑜𝑠𝜔𝑡 + 2𝛼𝜔𝑠𝑖𝑛𝜔𝑡]
𝑑𝑡 2
yazılabilir. Bunlar verilen diferansiyel denklemde yerine yazılırsa
𝐴𝑒 −𝛼𝑡 [(𝛼 2 − 𝜔2 )𝑐𝑜𝑠𝜔𝑡 + 2𝛼𝜔𝑠𝑖𝑛𝜔𝑡 − 𝛼𝛾𝑐𝑜𝑠𝜔𝑡 − 𝜔𝛾𝑠𝑖𝑛𝜔𝑡 + 𝜔02 𝑐𝑜𝑠𝜔𝑡 ] = 0
veya
𝐴𝑒 −𝛼𝑡 [(𝛼 2 − 𝜔2 − 𝛼𝛾 + 𝜔02 )𝑐𝑜𝑠𝜔𝑡 + (2𝛼𝜔 − 𝜔𝛾)𝑠𝑖𝑛𝜔𝑡 ] = 0
elde edilir. Bunun her zaman sağlanabilmesi için büyük parantez içindeki 𝑠𝑖𝑛𝜔𝑡
ve 𝑐𝑜𝑠𝜔𝑡’in katsayılarının sıfır olması gerekir yani,
2𝛼𝜔 − 𝜔𝛾 = 0
39
𝛼 2 − 𝜔2 − 𝛼𝛾 + 𝜔02 = 0
olmalıdır. Bu iki eşitlikten
𝛾
𝛾2
2
4
𝛼 = ; 𝜔2 = 𝜔02 −
sonuçlarını elde ederiz. Bu sonuçları daha önce anlatılanlardan da biliyorsunuz.
ÖRNEK-6
Kütlesi m olan bir cisim şekilde görüldüğü gibi kuvvet sabiti k olan ve
gerilmemiş haldeki uzunlukları 𝑎0 olan iki özdeş yaylara bağlanmıştır. Sistem
sürtünmesiz bir masa üzerindedir. Her iki yay 𝑎0 ’dan daha büyük l uzunluğuna
kadar uzayabilmektedir. m kütlesinin denge konumunda yatay yer değiştirmesi x
ile ve düşey yer değiştirmesi y ile gösterilmiştir.
a) 𝑥 doğrultusundaki küçük yer değiştirmelere karşılık gelen hareketin
diferansiyel denklemini yazınız.
b) 𝑦 doğrultusundaki küçük yer değiştirmelere karşılık gelen hareketin
diferansiyel denklemini yazınız (𝑦 ≪ 𝑎 kabul ediniz).
c) 𝑎 ve 𝑎0 vasıtasıyla 𝑥 ve 𝑦 boyunca titreşim periyotlarının oranını hesap
ediniz.
d) 𝑡 = 0 da m kütlesi 𝑥 = 𝑦 = 𝐴0 noktasından sıfır hızla harekete geçerse,
herhangi bir t anında cismin 𝑥 ve 𝑦 koordinatları nedir? (French-p3.19)
Çözüm:
a) Denge halinde yayların ikisi de a kadar gerilmiş durumda olsun (Yayların
serbest boyu 𝑎0 ). m kütlesini sağa doğru x kadar çektiğimizi düşünelim.
Bu durumda m kütlesine etkiyen bileşke kuvvet
𝐹 = −2𝑘𝑥 olacağı açıktır. 2. Newton yasasından
𝑑2𝑥
𝑚 2 = −2𝑘𝑥
𝑑𝑡
veya
40
veya 𝜔𝑥2 =
2𝑘
𝑚
𝑑 2 𝑥 2𝑘
+
𝑥=0
𝑑𝑡 2 𝑚
alarak
𝑑2𝑥
+ 𝜔𝑥2 𝑥 = 0
2
𝑑𝑡
yazabiliriz.
b)
m kütlesini şekildeki gibi y doğrultusunda hafifçe çektiğimizi düşünelim.
Yayların eşit miktarda uzayacağı açıktır. Yayların yeni boyunun L olduğunu
kabul edersek, yaylardaki uzama miktarı
∆𝐿 = 𝐿 − 𝑎0
olacaktır. Bu durumda yayların kütleye uygulayacağı geri çağırıcı kuvvet
𝑇 = −𝑘(𝐿 − 𝑎0 )
olacaktır. T gerilimlerinin yatay bileşenleri (𝑇𝑐𝑜𝑠𝜃) eşit ve zıt yönlüdür. Bu
nedenle kütleye yatay doğrultuda net bir kuvvet etkimez. T gerilimlerinin düşey
bileşenleri ( 𝑇𝑠𝑖𝑛𝜃 ) eşit ve aşağı doğrudur. Bu nedenle m kütlesine düşey
doğrultuda etkiyen bileşke kuvvet
𝐹𝑦 = −2𝑇𝑠𝑖𝑛𝜃
olacaktır. Bu durumda
𝑚
𝑑2𝑦
= −2𝑇𝑠𝑖𝑛𝜃 = −2𝑘(𝐿 − 𝑎0 )𝑠𝑖𝑛𝜃
𝑑𝑡 2
𝑦
yazabiliriz. Şekilden 𝑠𝑖𝑛𝜃 = yazılabilir. Bunu yukarıdaki ifadede kullanırsak
𝐿
𝑚
veya
yazılabilir. Şekilden
𝑑2𝑦
𝑦
= −2𝑘(𝐿 − 𝑎0 )
2
𝑑𝑡
𝐿
𝑑2𝑦
𝑘
𝑎0
+ 2 (1 − ) 𝑦 = 0
2
𝑑𝑡
𝑚
𝐿
𝐿2 = 𝑎2 + 𝑦 2
olduğu açıktır. Bu değeri yukarıda yerine yazarsak
𝑑2𝑦
𝑘
𝑎0
+ 2 (1 −
)𝑦 = 0
2
𝑑𝑡
𝑚
√𝑎2 + 𝑦 2
41
elde ederiz. Burada y’nin katsayısı sabit olmadığı için bu denklem BHH
𝑎0
denklemi değildir. Ancak 𝑦 ≪ 𝑎 yaklaşımında olaya baktığımız için √𝑎2+𝑦
2
seriye açılarak
𝑎0
1
𝑎0
𝑦2
=
≅ (1 − 2 )
𝑎
𝑎
2𝑎
𝑦 2
√𝑎2 + 𝑦 2
√1 + ( )
𝑎
𝑎0
yazılabilir. Bu durumda y’nin katsayısı(1 −
𝑎0
√𝑎2 +𝑦 2
) için
𝑎0
𝑦2
𝑎0
1−
≅ 1 − (1 − 2 ) ≅ 1 −
𝑎
2𝑎
𝑎
√𝑎2 + 𝑦 2
𝑎0
alınabilir (𝑦 ≪ 𝑎 olduğu için). Bu yaklaşımda y doğrultusunda hareket denklemi
için
𝑑 2 𝑦 2𝑘
𝑎0
+
(1
−
)𝑦 = 0
𝑑𝑡 2 𝑚
𝑎
ifadesini yazabiliriz. Burada y’nin katsayısı pozitif olduğu için
𝜔𝑦2 =
2𝑘
𝑎0
(1 − )
𝑚
𝑎
alınabilir. Bu durumda
𝑑2 𝑦
+ 𝜔𝑦2 𝑦 = 0
𝑑𝑡 2
yazabiliriz. Bu denklemin BHH’in hareket denklemi olduğuna dikkat ediniz.
c) x-doğrultusundaki hareket denkleminden
2𝑘
𝜔𝑥2 =
𝑚
ve y-doğrultusundaki hareket denkleminden
2𝑘
𝑎0
𝜔𝑦2 =
(1 − )
𝑚
𝑎
elde etmiştik. Buradan periyotlar için
𝑇𝑥 = 2𝜋√
𝑚
2𝑘
ve 𝑇𝑦 = 2𝜋√
𝑚
(
𝑎
2𝑘 𝑎−𝑎0
)
ifadelerini yazabiliriz. Buradan periyotlar oranı için
𝑇𝑥
𝑎 − 𝑎0
=√
𝑇𝑦
𝑎
sonucunu elde ederiz.
d) Kütlenin x ve y doğrultusundaki hareketi BHH olduğu için
2𝑘
𝑥 = 𝐴0 𝑐𝑜𝑠√ 𝑚 𝑡 ve
2𝑘
𝑦 = 𝐴0 𝑐𝑜𝑠√ 𝑚 (1 −
𝑎0
𝑎
)𝑡
yazabiliriz.
42
ÖRNEK-7
Kütlesi m olan küçük bir top uzunluğu 𝑙1 ve 𝑙2 olan iki tel ile şekildeki gibi
duvara bağlanmıştır. Denge durumunda her iki teldeki gerilim 𝑇0 ’dır. m kütlesi
düşey doğrultuda hafifçe çekilip serbest bırakılıyor. Küçük titreşimlerin
periyodunu bulunuz.
Çözüm:
𝑇1 ve 𝑇2 gerilimlerinin yatay bileşenleri birbirine zıt yöndedir ve kütlenin yatay
doğrultuda titreşimine bir katkı sağlamaz. 𝑇1 ve 𝑇2 gerilimlerinin düşey
bileşenleri aşağı doğrudur. Bu bileşenlerin toplamı m kütlesine geri çağırıcı
kuvvet uygular. Bu kuvvet
𝐹 = −𝑇1 𝑠𝑖𝑛𝜃1 − 𝑇2 𝑠𝑖𝑛𝜃2
şeklinde yazılabilir. Küçük salınımlar için
𝑠𝑖𝑛𝜃1 ≅ 𝑡𝑎𝑛𝜃1 =
𝑦
𝑙1
ve 𝑠𝑖𝑛𝜃2 ≅ 𝑡𝑎𝑛𝜃2 =
𝑦
𝑙2
alınabilir. Ayrıca küçük titreşimler için 𝑇1 = 𝑇2 = 𝑇0 alınabilir. Bu durumda F
kuvveti için
𝐹 = −𝑇1 𝑠𝑖𝑛𝜃1 − 𝑇2 𝑠𝑖𝑛𝜃2 ≅= −𝑇0
𝑦
𝑙1
− 𝑇0
𝑦
𝑙2
1
1
1
2
= −𝑇0 ( + ) 𝑦
𝑙
𝑙
yazabiliriz. Bu durumda m kütlesinin hareket denklemi için
𝑑2𝑦
1 1
𝑚 2 = −𝑇0 ( + ) 𝑦
𝑑𝑡
𝑙1 𝑙2
veya
𝑑2𝑦
1 1
𝑚 2 + 𝑇0 ( + ) 𝑦 = 0
𝑑𝑡
𝑙1 𝑙2
veya
43
𝑑2 𝑦 𝑇0 𝑙1 + 𝑙2
+ (
)𝑦 = 0
𝑑𝑡 2 𝑚 𝑙1 𝑙2
Burada
𝜔2 =
𝑇0 𝑙1 + 𝑙2
(
)
𝑚 𝑙1 𝑙2
alarak
𝑑2𝑦
𝑚 2 + 𝜔2 𝑦 = 0
𝑑𝑡
yazabiliriz. Buradan Periyot için
𝑇 = 2𝜋√
𝑚𝑙1 𝑙2
𝑇0 (𝑙1 + 𝑙2 )
ifadesi elde edilir.
ÖRNEK-8
0,2 kg kütleli bir cisim kuvvet sabiti 80 N/m olan bir yaya asılıdır. Bu cisim
– 𝑏𝑣 ile verilen bir sürtünme (sönüm) kuvvetine maruz kalırsa (burada 𝑣 cismin
hızıdır),
a) Sistemin serbest salınımlarının diferansiyel denklemini yazınız.
b) Eğer sönümlü harmonik hareketin frekansı, sönüm olmadığı zamanki
frekansın √3/2’si ise b sabitinin değeri nedir?
c) Sistemin Q kalite faktörü nedir, 10 salınım sonunda titreşimin genliği
hangi faktör (kaç kat) ile azalır? (French-p3.14)
Çözüm:
a) Sisteme etkiyen F kuvveti için
𝐹 = −𝑘𝑥 − 𝑏𝑣
yazabiliriz. Sistemin hareket denklemi
𝑑2𝑥
𝑚 2 = −𝑘𝑥 − 𝑏𝑣
𝑑𝑡
veya
𝑑2𝑥 𝑘
𝑏
+
𝑥
+
𝑣=0
𝑑𝑡 2 𝑚
𝑚
𝑏
𝑘
𝛾 = ve 𝜔02 = alınarak
𝑚
𝑚
𝑑2𝑥
𝑑𝑥
+
𝛾
+ 𝜔02 𝑥 = 0
𝑑𝑡 2
𝑑𝑡
yazılabilir. m=0,2 kg ve k=80 N/m değerleri yerine yazılarak hareket denklemi
için
44
𝑑2𝑥
𝑑𝑥
+
5𝑏
+ 400𝑥 = 0
𝑑𝑡 2
𝑑𝑡
yazılabilir.
b) Verilenler kullanılırsa 𝜔02 =
𝑘
𝑚
=
80
0,2
= 400 ⇒ 𝜔0 = 20 𝑠 −1
Ders notları ve Örnek-5’deki problemin sonucundan
𝛾2
2
2
𝜔 = 𝜔0 −
4
olduğunu biliyoruz. Verilenleri bu ifadede kullanarak
(
√3
𝜔0 ) 2
2
= 𝜔02 −
𝛾2
4
3
𝛾2
4
4
⇒ 𝜔02 = 𝜔02 −
1
𝛾2
4
4
⇒ 𝜔02 =
𝑏
⇒ 𝜔0 = 𝛾
elde edilir. Buradan 𝛾 = 20 𝑠 −1 bulunur. 𝛾 = olduğundan b için
𝑚
𝑏 = 20𝑥0,2 = 4 𝑁. 𝑠/𝑚
sonucu elde edilir.
c) Kalite faktörü Q için 𝑄 =
𝜔0
𝛾
= 1 değeri elde edilir.
Sönümlü harmonik hareketin genliği için
𝛾
𝐴 = 𝐴0 𝑒 −2𝑡
elde etmiştik (Ders notlarına bakınız). t=0 anındaki genliğe 𝐴1 ve 10 salınım
sonraki genliği ise 𝐴10 ile gösterelim. Bu durumda
𝛾
− 10𝑇
𝐴0 𝑒 2
𝛾
𝐴10
=
= 𝑒 −210𝑇
𝐴1
𝐴0
yazabiliriz. Burada T hareketin periyodudur. Q kalite faktörü ile 𝜔 frekansı
arasındaki ilişkinin
1
𝜔 = 𝜔0 (1 − 2 )1/2
4𝑄
olduğunu biliyorsunuz (Ders notlarına bakınız). Buradan
1
2𝜋
𝜋
𝜔 = 20(1 − )1/2 = 10√3 ⇒ 𝑇 =
=
s elde edilir. Bu değer yukarıdaki
4
10√3
5 √3
ifadede kullanılırsa
20
𝜋
20𝜋
𝛾
𝐴10
− 10
−
− 10𝑇
2 5√3
2
=𝑒
=𝑒
= 𝑒 √3 ≅ 1.76𝑥10−16
𝐴1
elde edilir. Bu sayının çok küçük olduğuna dikkat ediniz. Başka bir deyişle
sistem çok kısa sürede sönüme gider.
45
ÖRNEK-9
Bir çok titreşen sistemde depolanan enerji zamanla 𝐸 = 𝐸0 𝑒 −𝛾𝑡 şeklinde üstel
𝜔
azalır. Böyle bir titreşim hareketi için Q ifadesi 𝑄 = 0 ile verilir. Burada 𝜔0
𝛾
titreşimlerin doğal frekensıdır.
a) Bir piyanonun orta C’sine vurulduğu zaman titreşim enerjisi 1s’de ilk
değerinin yarısına düşer. Orta C’nin frekansı 256 Hz’dir. Sistemin Q
değeri nedir?
b) Daha yüksek oktavlı bir notasında (f=512Hz) enerji azalması aynı sürede
oluyorsa Q değeri nedir?
c) 0,1 kg kütlesindeki bir cisim yay sabiti k=0,9 N/m olan bir yaya asılıdır.
Bu sistem sönüm sabiti b (𝐹𝑠ö𝑛ü𝑚 = −𝑏𝑣)olan bir akışkan içinde hareket
ederek 4 s’de enerjisi ilk değerinin 1/e’sine düşüyor. Q ve b değerlerini
bulunuz. (French-p3.15)
Çözüm:
a) 𝐸 = 𝐸0 𝑒 −𝛾𝑡 ifadesi
yazabiliriz. Buradan
ve
verilenler
kullanılarak
0,5𝐸0 = 𝐸0 𝑒 −𝛾.1
𝑒 𝛾 = 2 ⇒ 𝛾 = 𝐿𝑛2 elde edilir.
𝑄𝑎 =
𝜔0
b) 𝑄𝑏 =
𝜔𝑏
𝛾
𝛾
=
2𝜋𝑓𝑎
=
2𝜋𝑓𝑏
𝛾
𝛾
c) 𝐸 = 𝐸0 𝑒 −𝛾𝑡 ⇒
=
2𝜋𝑥256
=
2𝜋𝑥512
𝐸0
𝑒
𝐿𝑛2
𝐿𝑛2
=
512𝜋
𝐿𝑛2
= 2𝑄𝑎
1
= 𝐸0 𝑒 −𝛾4 ⇒ 𝑒 = 𝑒 4𝛾 ⇒ 𝛾 = = 0,25 𝑠 −1 ⇒
4
𝑏 = 𝑚𝛾 = 0,1𝑥0,25 = 0,025 kg/s
0,9
𝜔0 √𝑘/𝑚 √0.1
3
𝑄=
=
=
=
= 12
𝛾
𝛾
0,25 0,25
ÖRNEK-10
Bir LRC devresinde 𝐿 = 10 𝑚𝐻, 𝐶 = 1,0 𝜇𝐹 ve 𝑅 = 1 Ω’dur.
a) Yük salınımlarının genliği ne kadar süre sonra yarıya düşer?
b) Bu sürede kaç periyotluk salınım olur?
Çözüm:
Şekildeki LRC devresinde S anahtarı kapandıktan sonra kondansatör üzerindeki
yük harmonik hareket yapar. Bu LRC devresinde yük için
𝑞 = 𝑞0 𝑒
− 𝑅𝑡/2𝐿
1
𝑅2 1/2
cos [( − 2 ) 𝑡]
𝐿𝐶 4𝐿
46
ifadesini türetmiştik (Ders notlarına bakınız). Bu ifadeden genlik için
𝐴 = 𝑞0 𝑒 − 𝑅𝑡/2𝐿
yazabiliriz. t=0 anında genliğe 𝐴1 dersek, 𝐴1 = 𝑞0 olacaktır. Genliğin yarıya
𝐴
düştüğü an için 𝐴 = 1 = 𝑞0 /2 yazabiliriz. Buradan
𝑞0
2
2
𝑅𝑡
𝑅𝑡
= 𝑞0 𝑒 −2𝐿 ⇒ 2 = 𝑒 2𝐿 ⇒ 𝐿𝑛2 =
𝑅𝑡
2𝐿
⇒𝑡=
2𝐿𝑛2𝐿
𝑅
2𝐿𝑛2𝑥10𝑥10−3
𝑡=
≅ 13,86 𝑚𝑠
1
elde edilir.
b) Sistemin titreşim frekansı için
1
𝑅2
=
−
𝐿𝐶 4𝐿2
2
Bağıntısını elde etmiştik.
1
2 =
−
−3
−6
10𝑥10
𝑥1𝑥10
1
4𝑥(10𝑥10−3 )2
= 108 − 2500 ≅ 108 s-2
1
alınabilir.Bunun anlamı 𝜔 ≅
alınmasına denktir. Buradan salınımların
√𝐿𝐶
periyodu için
2𝜋
2𝜋
𝑇=
= 4 𝑠
𝜔
10
yazılabilir. 𝑡 = 13,86 𝑚𝑠 süresi içindeki periyot sayısına n dersek,
13,86𝑥10−3
𝑛=
≅ 22
2𝜋
104
elde edilir. Bunun anlamı 22 salınımdan sonra yük genliği yarıya düşer.
ÖRNEK-11
Sönümlü salınım yapan bir LRC devresinde bir devirlik sürede enerji kayıp
oranı
∆𝑈
𝑈
’ın R’nin küçük olması durumunda yaklaşık olarak
2𝜋𝑅
𝜔𝐿
ile
verilebileceğini gösteriniz.
Çözüm:
Şekildeki LRC devresinde S anahtarı kapandıktan sonra kondansatör üzerindeki
47
yük harmonik hareket yapar. Bu LRC devresinde yük için
𝑞 = 𝑞0 𝑒
− 𝑅𝑡/2𝐿
1
𝑅2 1/2
cos [( − 2 ) 𝑡]
𝐿𝐶 4𝐿
ifadesini türetmiştik. R’nin küçük olduğu durumda bu ifadeyi
𝑞 = 𝑞0 𝑒 − 𝑅𝑡/2𝐿 cos [(
1 1/2
) 𝑡]
𝐿𝐶
şeklinde yazabiliriz. Başlangıçta anahtar açık iken kondansatör yüklüdür ve
devreden akım geçmez. Bu durumda kondansatördeki enerji
1 𝑞02
𝑈0 =
2𝐶
ifadesi ile verilir. Anahtar kapandıktan sonra kondasatördeki yük yukarıda
verilen bağıntıyla tanımlı osilasyon yapar. Bir periyotluk süre sonunda yük için
𝑞 = 𝑞0 𝑒 − 𝑅𝑇/2𝐿 cos [(
1 1/2
) 𝑇] = 𝑞0 𝑒 − 𝑅𝑇/2𝐿
𝐿𝐶
1
ifadesini yazabiliriz (𝑐𝑜𝑠 [( )1/2 𝑇] = 1 olduğuna dikkat ediniz). Bu anda
𝐿𝐶
kondansördeki enerjiyi U ile gösterirsek,
1 𝑞 2 1 (𝑞0 𝑒 − 𝑅𝑇/2𝐿 )2 1 𝑞02 𝑒 − 𝑅𝑇/𝐿
𝑈=
=
=
2𝐶
2
𝐶
2
𝐶
yazabiliriz. Buradan
𝑈
𝑈0
= 𝑒 − 𝑅𝑇/𝐿 ⇒ 𝑈 = 𝑈0 𝑒 − 𝑅𝑇/𝐿
𝑅𝑇
𝑅𝑇
⇒ ∆𝑈 = 𝑈0 − 𝑈 = 𝑈0 − 𝑈0 𝑒 − 𝐿 = 𝑈0 (1 − 𝑒 − 𝐿 )
yazabiliriz. Buradan
48
𝑅𝑇
∆𝑈
= 1 − 𝑒− 𝐿
𝑈0
x
elde ederiz. 𝑒 ifadesini seriye açılımının
𝑒x = 1 + 𝑥 +
1 2 1 3
𝑥 + 𝑥 +⋯
2!
3!
ifadesi ile verildiğini biliyoruz. Burada x’in küçük değerlerinde 𝑒 x ≅ 1 + 𝑥
alabiliriz. Bu bilgiden yararlanarak
𝑅𝑇
∆𝑈
𝑅𝑇
𝑅𝑇
= 1 − 𝑒 − 𝐿 ≅ 1 − (1 − ) =
𝑈0
𝐿
𝐿
yazabiliriz. R’nin küçük değerlerinde açısal frekans 𝜔 =
verilebilir. Bu durumda periyot için 𝑇 =
2𝜋
𝜔
1
√𝐿𝐶
ifadesi ile
yazabiliriz ve değeri yukarda elde
ettiğimiz sonuçta kullanırsak,
∆𝑈 𝑅𝑇 2𝜋𝑅
=
=
𝑈0
𝐿
𝜔𝐿
sonucunu elde ederiz.
ÖRNEK-12
Kütlesi 0,5 kg olan bir blok, kuvvet sabiti k=12,5 N/m olan bir yayın ucuna
bağlı olarak kritik altı (under dumped) sönümlü hareket yapıyor. Hareketin
frekansı,
sönümsüz
hareketin
frekansından
%
0,2
daha
az
olduğu
gözlemleniyor.
a) Hareketin sönüm sabiti b’nin değerini bulunuz.
b) Hareketin genliğinin zamana bağlı değişimini bulunuz.
c) Mekanik enerjinin başlangıç değerinin %1’ine düşmesi için geçen süreyi
bulunuz.
d) Sistemin kritik sönüm durumunda hareket edebilmesi için sönüm sabiti
(𝑏𝑘 ) ne olmalıdır?
Çözüm:
a) Sönümlü harmonik hareketin açısal frekansının
49
𝜔 = √𝜔02 −
𝑏2
4𝑚2
ile verildiğini biliyorsunuz. Buradan sönüm sabiti b için
𝑏 = 2𝑚√𝜔20 − 𝜔 2
yazılabilir. Verilenler kullanılarak sönüm sabiti b için
12,5
𝑏 = 2𝑥0,5√𝜔02 − (0,998𝜔0 )2 = √1 − 0,9982 𝜔0 = 0,0632√
0,5
= 0,0632𝑥5 = 0,316 𝑘𝑔/𝑠
elde edilir.
b)
−
𝐴 = 𝐴0 e
𝑏t
2m
−
= 𝐴0 e
0,316t
2x0,5
= 𝐴0 e− 0,316t
elde edilir.
c) Sönümlü hareketin toplam enerjisinin genliğin karesi ile orantılı olduğunu
biliyoruz (Ders notlarına bakınız)
𝐸𝑡𝑜𝑡 ∝ (𝐴0 e
𝐸𝑡𝑜𝑡
𝐸0
𝐸𝑡𝑜𝑡
𝐸0
−
𝑏t 2
2m )
𝑏t
= 𝐴20 e− m
= 0,01 olması için geçen süre soruluyor.
𝑏t
=
−
𝐴20 e m
𝐴20
−
=e
𝑏t
m
−
=e
0,316t
0,5
⇒ 0,632𝑡 = 𝑙𝑛100 ⇒ 𝑡 =
= e− 0,632t = 0,01 ⇒ e 0,632t = 100
𝑙𝑛100
0,632
= 7,287 𝑠
d) Kritik sönüm halinde
𝜔02
𝑏𝑘2
−
=0
4𝑚2
olduğunu hatırlayınız. Buradan
𝑏𝑘 = √4𝑘𝑚 = √4𝑥12,5𝑥0,5 = √25 = 5 𝑘𝑔/𝑠
elde edilir.
50