MÜHENDİSLİK MEKANİĞİ
STATİK
DERS NOTLARI
Yrd. Doç. Dr. Hüseyin BAYIROĞLU
İSTANBUL 2006
İçindekiler
1
GİRİŞ
5
1.1 Mekaniğin tanımı
5
1.2 Temel ilkeler ve görüşler
5
2
VEKTÖRLERİN VE İŞLEMLERİNİN TANIMI
6
2.1 Vektörün tanımı
6
2.2 Vektörel işlemlerin tanımı
6
2.2.1 Vektörün bir sayı ile çarpımı
6
2.2.2 Vektörlerin toplamı
7
2.2.3 İki Vektörün birbiri ile skaler çarpımı
7
2.2.4 İki Vektörün birbiri ile vektörel çarpımı
7
2.2.5 Bir vektörün bir eksen üzerindeki izdüşümü
8
3
VEKTÖRLERİN ANALİTİK İNCELENMESİ
9
3.1 İki boyutlu vektörlerin kartezyen koordinatlarda gösterilişi
9
3.2 Üç boyutlu vektörlerin kartezyen koordinatlarda gösterilişi 11
3.3 Kartezyen koordinatlarda vektörel işlemler
13
3.3.1 Vektörün bir sayı ile çarpımı
13
3.3.2 Vektörlerin toplamı
14
3.3.3 İki vektörün skaler çarpımı
15
3.3.4 İki vektörün vektörel çarpımı
16
3.3.5 Üç vektörün karışık çarpımı
17
3.3.6 Bir vektörün bir eksen üzerindeki izdüşümü
18
4
KUVVET SİSTEMLERİ
19
4.1 Kuvvetin tanımı ve vektörle gösterilişi
19
4.2 Bir kuvvetin bir noktaya göre momenti
20
4.3 Bir kuvvetin bir eksene göre momenti
21
4.4 Bir kuvvet sisteminin bir noktaya göre momenti ve indirgeme elemanları
(Bir kuvvet sisteminin statik eşdeğeri )
22
4.5 Bir kuvvet sisteminin değişmezleri
24
4.6 Dejenere kuvvet sistemleri
26
4.6.1 Sıfıra eşdeğer kuvvet sistemi
26
4.6.2 Kuvvet çiftine (Tek bir momente) eşdeğer kuvvet sistemi 26
4.6.3 Bileşkeye eşdeğer kuvvet sistemi
26
2
4.6.4 Bileşkesi olan kuvvet sistemi
27
4.7 Merkezi eksen
27
4.7 Paralel bağlı kuvvet sistemi ve merkezi
29
5
KÜTLE MERKEZİ
31
31
38
5.1 Bir sürekli cismin kütle merkezi
5.2 Bileşik cismin kütle merkezi
6
STATİK
41
6.1 Giriş
41
6.2 İç kuvvetler ve kesit zorları 47
6.3 Statiğin temel ilkelerinin geçerli olduğu referans sistemleri 47
6.4 Bir maddesel noktanın kuvvetler etkisinde dengesi
48
6.5 Bir Rijid cismin kuvvetler etkisinde dengesi 48
6.6 Bir Rijid cisim sisteminin kuvvetler etkisinde dengesi 48
6.7 Düzlemsel kuvvetler etkisindeki cisimlerin dengesi
48
6.8 Üç boyutlu kuvvetler etkisindeki bir rijid cismin dengesi ile ilgili
uygulamalar
53
7
SÜRTÜNME
60
7.1 Sürtünme ve sürtünme katsayısı 60
7.2 Mesnetlerdeki sürtünmeler
62
7.3 Halat ve kayış kasnak sürtünmesi
65
8
YAYILI YÜKLER
68
8.1 Yayılı yüklerin tanımı
8.2 Kirişlerde yayılı yükler
68
68
9
KABLOLAR
72
9.1 Genel bilgi
72
9.2 Konsantre yükler etkisindeki kablolar 72
9.3 Yayılı yükler etkisindeki kablolar 78
9.3.1 Yatayda düzgün yayılı yük etkisindeki kablolar (Parabolik
kablo )
79
9.3.2 Kendi ağırlığı etkisinde olan homojen yapıdaki kablo veya
zincirin dengesi
82
3
10
DÜZLEM KAFES KİRİŞ SİSTEMLERİ
86
10.1 Genel bilgi ve tarifler
86
10.2 Basit kafes sistemi
86
10.3 Düğüm noktaları metodu ile kafes sisteminin analizi
10.4 Özel düğüm noktaları
92
10.3 Kesim metodu ile kafes sisteminin analizi
94
88
11
ÇERÇEVE VE MAKİNALAR
97
11.1 Giriş
97
11.2 Çerçeveler
11.3 Makineler
97
101
12
KİRİŞLERDEKİ KESİT ZORLARI
KESME KUVVETİ VE EĞİLME MOMENTİ
DİAGRAMLARI
104
12.1 Kirişlerde kesit zorları
104
12.2 Kesit zorları için kabul edilen pozitif yönler
104
12.3 Yayılı yük , kesme kuvveti ve eğilme momenti arasındaki
bağıntılar
105
12.4 Kesme kuvveti ve eğilme momenti diyagramları
106
13
VİRTÜEL İŞLER METODU
115
13.1 Giriş
115
13.2 Virtüel yer değiştirme
115
13.3 Bir kuvvetin virtüel işi
116
13.4 Bir momentin virtüel işi
116
13.5 Virtüel işler ilkesi
116
13.6 Çok serbestlik dereceli sistemlerde virtüel işler ilkesi 119
EK A
Daha önceki senelerde sorulan Vize soruları ve cevapları 122
EK B
Daha önceki senelerde sorulan Final soruları ve cevapları 164
4
BÖLÜM 1
GİRİŞ
1.1 Mekaniğin tanımı
Cisimlerin Kuvvetler etkisinde dengesini ve hareketlerini inceleyen bilim
dalına mekanik denir.
Mekanik cisimlere maddesel nokta, rijid cisim, elastik cisim , plastik cisim
ve akışkanlar ( sıvı ve gazlar) olmak üzere yaklaşır.Mekanik eğer sadece
Maddesel nokta ve rijid cisim modelini inceliyorsa buna mühendislik
mekaniği denir. Bunun dışında incelediği cisim modeline uygun isimler
verilir. Örneğin elastomekanik veya elastisite, plastisite , hidromekanik ,
aerodinamik, elektromekanik gibi.
Mekanik , Statik ve Dinamik olmak üzere iki bilim dalına ayrılır.
Statik kuvvetler etkisinde cisimlerin denge koşullarını, Dinamik ise
hareketlerini inceler.
1.2 Temel ilkeler ve görüşler
Mekaniğin temel aldığı ilkeler Newton yasalarıdır. Bu yasalar cisimlere
maddesel nokta modeli ile yaklaşıldığında kullanışlıdır. Diğer cisim
modellerine matematiksel modellerle genişletilmesi gerekir. Benzer şekilde
mekanikte kuvvetler maddesel nokta modelinde vektörlerle gösterilebilmesine
karşı rijid cisim modelinde vektör ve etki doğrusu kavramları beraber
kullanılmalıdır.
Mühendislik mekaniği vektörler yardımı ile oluşturulduğu için vektörleri
bize gerektiği kadar ayrıntılı bir şekilde ele almamız gerekir.
5
BÖLÜM 2
VEKTÖRLERİN VE TEMEL İŞLEMLERİNİN
TANIMI
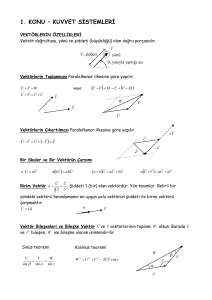
2.1 Vektörlerin tanımı
Doğrultu , yön ve modülü ile tanımlanan büyüklüklere vektörler denir.
Bir vektör Koyulaştırılmış harfler ile veya üzerine ok işareti çizilen harflerle
belirtilir. Vektörler aşağıdaki gibi yönlendirilmiş doğru parçası ile
gösterilebilir.
V
Bir referans sistemine göre çizilen bu doğru parçasının doğrultusu vektörün
doğrultusunu , yönü vektörün yönünü ve uzunluğu vektörün modülünü
gösterir.
Bir vektörün modülü | V | ile gösterilir.
Sıfır vektör : modülü sıfır olup doğrultu ve yönü belirsiz olan vektörlere sıfır
vektörü denir ve 0 ile gösterilir.
V vektörü :
vektöre
V
V vektörü ile aynı doğrultu ve modülde fakat ters yöndeki
vektörü denir.
Birim vektör: Modülünün sayısal değeri 1 olan vektöre birim vektör denir.
2.2 Vektörel işlemlerin tanımı
Vektörler üzerine inşa edilen temel işlemler : Vektörün bir reel sayı ile
çarpımı , vektörlerin toplanması , skaler ve vektörel çarpımı gibi işlemlerdir.
2.2.1 Vektörün bir sayı ile çarpımı
Çarpılan vektörle aynı doğrultuda bir vektördür. Eğer çarpım katsayısı
pozitif ise yönde aynıdır. Modül ise çarpım katsayısı ile vektörün modülünün
çarpımı kadardır.
| kV | = | k | | V |
Bir vektörün birim vektörü : Vektörü modülüne bölerek elde edilir.
Bir eksenin birim vektörü : Eksen doğrultusunda ve yönündeki herhangibir
vektörü modülüne bölerek bulunur.
6
2.2.2 Vektörlerin toplamı
Başlangıçları aynı noktaya getirilen iki vektörün toplamı bu vektörler
üzerine kurulan paralel kenarın köşegeni üzerindeki aşağıda gösterilen
vektöre eşittir.
A
CAB
B
2.2.3 İki vektörün birbiri ile skaler çarpımı
İki vektör arasındaki açı: Başlangıçları aynı noktaya getirilen iki vektör
arasındaki 1800 den büyük olmayan açı iki vektör arasındaki açı olarak alınır
.
A
B
Skaler Çarpım sonucunda skaler elde edilir .
A B | A | | B | Cos
2.2.4 İki vektörün birbiri ile vektörel çarpımı
Vektörel çarpımın sonucu yine bir vektördür.
C A B (| A | | B | Sin ) n
Burada Vektörel çarpım sonunda elde edilen vektör her iki vektöre dik
doğrultuda ve | A | | B | Sin modülünde bir vektördür. Yönü ise sağ el
kuralı ile bulunabilir.
7
Sağ el kuralı ile elde edilen yön , baş parmak dışındaki sağ el parmakları
birinci vektörü ikinci vektöre doğru döndürme yönünde tutulursa baş
parmağın gösterdiği yöndür.
CAB
B
n
h
A
| A | | B | Sin
ifadesinde | A | Sin h olduğundan A ve B vektörlerinin
birbiri ile vektörel çarpımının modülü bu vektörlerin başlangıçları aynı
noktaya getirilirse üzerine kurulan paralelkenarın alanına eşit olduğu görülür.
2.2.5 Bir vektörün bir eksen üzerindeki izdüşümü
V
V
Δ
V | V | Cos
V V U
burada U
Δ ekseninin birim vektörüdür.
8
BÖLÜM 3
VEKTÖRLERİN ANALİTİK İNCELENMESİ
3.1 İki boyutlu vektörlerin kartezyen koordinatlarda gösterilişi
y
j
V
Vy
α
i
x
Vx
Düzlemde bir vektör
V Vx i Vy j
şeklinde x ve y ekseni doğrultusundaki vektörlerin toplamı cinsinden
yazılabilir. Bu vektörün modülü ise aşağıdaki gibi pisagor teoremi yardımı ile
bulunur.
V Vx2 Vy2
Bir vektörün doğrultusunda ve yönündeki birim vektör ise vektör modülüne
bölünerek elde edilir.
U (V)
V
V
,
U(V)
Vx
V
9
i
Vy
V
j
Aşağıdaki gibi birim vektörün katsayılarının vektörün eksenlerle yaptığı
açıların kosinüslerine eşit olduğu gösterilebilir.
Cos
Vx
V
Cos
Ux ,
Vy
V
Uy
Problem 3.1.1
Bir düzlemdeki yatay doğrultu ile 300 derecelik açı yapan ve modülü 80 birim
olan vektörü ve birim vektörünü kartezyen koordinat sisteminde yazınız.
Çözüm:
y
V
Vy
θ
j
i
x
Vx
V Vx i V y j
V 80 birim ,
Vx V Cos ,
300
Vy V Sin
Vx 80 Cos 300 , Vx 69, 28birim
Vy 80 Sin300 ,
Vy 40 birim
V 69, 28 i 40 j
Vx i Vy j
U (V)
V
V
,
U(V)
U(V) 0,866 i 0, 5 j
10
69, 28 i 40
80
80
j
3.2 Üç boyutlu vektörlerin kartezyen koordinatlarda gösterilişi
y
j
H
F
B
A
Vy
β
γ
V
α Vx
i
E
x
O
Vz
k
C
D
Z
Üç boyutlu uzayda bir vektör kartezyen koordinat sisteminde
V Vx i Vy j Vz k
şeklinde x ve y ekseni doğrultusundaki vektörlerin toplamı cinsinden
yazılabilir. Bu vektörün modülü ise aşağıdaki gibi pisagor teoremi yardımı
ile bulunur.
V Vx2 Vy2 Vz2
Bir vektörün doğrultusunda ve yönündeki birim vektör ise vektör modülüne
bölünerek elde edilir.
U (V)
V
V
,
U(V)
Vx i Vy j Vz k
V
V
V
Aşağıdaki gibi birim vektörün katsayılarının vektörün eksenlerle yaptığı
açıların kosinüslerine eşit olduğu gösterilebilir.
Cos Vx U x ,
V
Cos
Vy
V
Uy
,
Cos Vz Uz
V
Problem 3.2.1
Bir V vektörünün başlangıcı kartezyen koordinat sisteminin başlangıç
noktasına yerleştirildiğinde uç noktası A (60,30,20) koordinatlarında ise bu
vektörün
a) bu koordinat sistemindeki yazılışını
b) modülünü
c) birim vektörünü
d) koordinat eksenleri ile yaptığı açıları bulunuz.
11
Çözüm:
y
H
F
Vx
B
A ( 60 ; 30 ; 20 )
V
β
Vy
α
O
x
γ
z
Vz
a)
V Vx i Vy j Vz k
V 60 i 30 j 20k
b)
V Vx2 Vy2 Vz2
V (60)2 (30)2 (20)2
,
V 70
c)
U (V)
U(V)
d)
V
U(V)
,
V
6 i 3 j 2
7
7
60i 30 j 20k
70
k
7
Vy
Cos
Cos Vx U x ,
,
Uy
V
V
Cos 6
, Cos 3 ,
2
Cos
7
7
7
310
,
64, 620
,
12
73, 40
Cos Vz Uz
V
3.3 Kartezyen koordinatlarda vektörel işlemler
3.3.1 Vektörün bir sayı ile çarpımı
Kartezyen koordinat sisteminde bir vektör
V V x i Vy j Vzk
şeklinde yazılırsa bu vektörün bir sayısı ile çarpımı aşağıdaki şekilden
görüldüğü gibi dikdörtgenler prizmasının bütün ölçüleri aynı λ sayısı ile
çarpılarak elde edildiğinden
V V x i Vy j Vzk
şeklinde yazılabilir.
y
λVz
V
V
λVy Vy
Vz
x
Vx
λVx
z
Bir vektörün bir sayı ile çarpımı vektörün doğrultusunu değiştirmez.
Eğer çarpım katsayısı pozitif ise yönü de değişmez.
Problem 3.3.1.1
Problem 3.2.1 de hesaplanan V 60 i 30 j 20k vektörünün λ=2,5 ile
çarpımından elde edilen V vektörünün
a) ifadesini
b) modülünü
c) birim vektörünü hesaplayınız.
Çözüm:
a) V V x i Vy j Vzk
V 2, 5 60 i 2, 5 30 j 2, 5 20k
V 150 i 75 j 50k
b)
V (150)2 (75)2 (50)2
13
V 175
,
V 2, 5 70 175
V V
c)
Vx
U(V)
V
Vy
Vz
j
V
k
V
2, 5 60 i 2, 5 30 j
2, 5 20
U(V)
U(V)
i
2, 5 70
2, 5 70
6 i 3 j
2 k
7 7 7
2, 5 70
U(V)
k
U
(V)
3.3.2 Vektörlerin toplamı
Şekilde gösterildiği gibi İki boyutlu uzayda A ve B
vektörünün toplamı
olan C vektörünün koordinat eksenleri doğrultusundaki bileşenleri A ve B
vektörlerinin aynı doğrultudaki bileşenleri toplanarak bulunur.
A Ax i Ay j ,
B Bx i By j
A B (A x B x ) i (A y B y ) j
y
E
By
D
B
Cy = Ay+By
C AB
A
Ay
x
O
Ax
Bx
Cx =Ax+Bx
Şekildeki ODE üçgeninden OE kenarının uzunluğu OD ve DE kenarlarının
uzunlukları toplamından büyük olamıyacağı bilindiğinden
AB A B
eşitsizliği yazılabilir.
Aynı işlemler üç boyutlu uzaya aşağıdaki gibi uygulanabilir.
A A x i A y j A zk ,
B B x i B y j B zk
A B (A x B x ) i (A y B y ) j (A z B z )k
14
Problem 3.3.2.1
A 6 i 3 j 2k
vektörü ile
B 12 i 3 j 4k vektörünün
a) modüllerini
b) bu vektörlerin toplamını
c) toplam vektörün modülünü hesaplayınız.
Çözüm:
a)
A 62 32 22
,
B (12) 2 (3)2 (4)2 ,
A7
B 13
b) A B (6 12)i (3 3) j (2 4)k
A B 18i 6 j 6k
c)
A B (18)2 62 62
A B 19, 9
3.3.3 İki vektörün skaler çarpımı
Aşağıda gösterildiği gibi A ve B
vektörünün skaler çarpımı bu vektörlerin
aynı doğrultudaki bileşenleri çarpımı toplanarak bulunur ve sonuç skalerdir.
, B Bx i By j Bzk
A A x i A y j A zk
A B A xB x A y B y A z B z
Skaler çarpımın tanımından skaler çarpımın mutlak değeri vektörlerin
modülleri çarpımından büyük olamaz.
Problem 3.3.3.1
A 6 i 3 j 2k
vektörü ile
B 12 i 3 j 4k vektörünün
a) skaler çarpımını
b) modülleri çarpımını hesaplayınız.
c) aralarındaki açıyı hesaplayınız.
Çözüm:
a) A B 6 12 3 3 2 4
A B 89
b)
A7 ,
B 13
A B 13 7 ,
A B 91
15
c) skaler çarpımın tanımından
A B A B Cos
Cos
A B
AB
Cos 89
91
12, 040
3.3.4 İki vektörün vektörel çarpımı
Sağ kartezyen koordinat sisteminde koordinat eksenlerinin birim vektörlerinin
vektörel çarpımı aşağıdaki gibi yazılır.
jk i
ijk ,
jik ,
, k j i
, i k j
kij
Sağ eksen sisteminde ifade edilen A ve B
vektörünün vektörel çarpımı olan
C vektörü aşağıda gösterilen determinantın açılımı yardımı ile hesaplanabilir.
A A x i A y j A zk ,
B B x i B y j B zk
A B (A x i A y j A zk) (B x i B y j B zk)
A B [(A x i ) (B x i )] [(A x i ) (B y j)] [(A x i ) (B zk)]
[(A y j) (B x i )] [(A y j) (B y j)] [(A y j) (B zk)]
[(Azk) (Bx i )] [(Azk) (By j)] [(Azk) (Bzk)]
i
A B Ax
Bx
j
k
Ay
Az
By
Bz
Problem 3.3.4.1
A 6 i 3 j 2k
vektörü ile
B 12 i 3 j 4k vektörünün
a) C A B vektörel çarpımını
b) C vektörel çarpım vektörü ile A vektörü arasındaki açıyı
c) C vektörel çarpım vektörü ile B vektörü arasındaki açıyı hesaplayınız.
Çözüm:
a)
i
C A B Ax
Bx
j
k
Ay
Az
By
Bz
i
,
j k
C AB 6 3 2
12 3 4
C A B (3 4 2 3)i (2 12 6 4) j (6 3 3 12)k
C A B 6 i 18k
16
b)
C A (6i 18k) (6 i 3 j 2k)
C A 6 6 18 2 0
olduğundan
C vektörü A vektörüne diktir.
c)
C B (6 i 18k) (12i 3 j 4k)
C B 6 12 18 4 0
olduğundan
C vektörü B vektörüne diktir.
3.3.5 Üç vektörün karışık çarpımı
İki vektörün vektörel çarpımından elde edilen vektörün bir diğer vektörle
skaler çarpımına bu üç vektörün karışık çarpımı denir.
A A x i A y j A zk
B B x i B y j B zk
C C x i C y j C zk
Ax
A (B C) B x
Cx
Ay
By
Az
Bz
Cy
Cz
Lineer cebirden bilindiği gibi bir Determinantta iki satırın yeri değişirse
determinantın işareti değişir , satırların yeri iki veya ikinin katları sayısında
değişirse determinantın değeri değişmez . Bu bilinen özellikten faydalanarak
aşağıdaki eşitlikler yazılabilir.
A (B C) B (C A) C (A B)
17
3.3.6 Bir vektörün bir eksen üzerindeki izdüşümü
V
θ
Δ
VΔ
V V U
V V x i Vy j Vzk
U U x i U y j U zk
V Vx U x Vy U y Vz U z
Problem 3.3.6.1
V 12 i 3 j 4k
vektörünün kartezyen koordinat eksenleri ile pozitif
bölgede eşit açılar yapan ve pozitif bölgeye doğru yönelmiş Δ eksenindeki
izdüşümünü ve bu eksenle yaptığı açıyı hesaplayınız.
Çözüm :
V V U
İzdüşüm alınacak eksenin birim vektörü bu eksen yönündeki bir vektörü
modülüne bölerek elde edilir.
i jk
1 1 1
U
2
2
U
,
2
V (12 i 3 j 4k) ( 1 i 1
3
V
3
1 i 1
3
j 1
3
3
k)
j 1
k
3
, V 12
19
3
V V U V Cos
Cos
19
3 13
Cos V
V
Cos 0,844
18
32, 450
1 3 1
3
3
41
3
BÖLÜM 4
KUVVET SİSTEMLERİ
4.1 Kuvvetin tanımı ve vektörle gösterilişi
Bir cismin şeklini veya hızını değiştiren ve başka cisimler tarafından uygulanan
fiziksel etkiye kuvvet denir.
Kuvvet doğrultu yön ve bir şiddet içerdiğinden vektörle gösterilebilir. Yalnız
aynı vektörle gösterilmesine rağmen kuvvet cismin farklı yerlerine
uygulandığında fiziksel etkisi farklı olur. Bundan dolayı kuvvet özellikle rijid
cisim mekaniğinde vektör ve etki doğrusu ile birlikte düşünülmelidir.
Etki doğrusu
F Kuvvet vektörü
19
4.2 Bir kuvvetin bir noktaya göre momenti
MO
o
F
θ
h
θ
A
MO F h
MO OA F
OA F F OA Sin
OA Sin h
Buradan MO F h
i
MO A x
Fx
j
k
Ay
Az
Fy
Fz
olduğu görülür.
MO (Ay Fz Az Fy ) i (Az Fx Ax Fz ) j (Ax Fy Ay Fx ) k
Problem 4.2.1
A(3,8,1) ve B(7,–4,4) noktalarından geçen 130 N. şiddetinde olan ve A dan B
ye doğru yönelmiş F kuvvetinin O(0,0,0) noktasına göre momentini bulunuz.
MO OA F
OA 3i 8 j k , F F UAB
UAB AB
, AB OB OA
AB
20
AB (7 i 4 j 4k) (3i 8 j k) , AB 4 i 12 j 3k
4 i 12 j 3k
4 (12)2 32
UAB
UAB
,
2
4 i 12 j 3
13 13 13
F 40 i 120 j 30k
MO (3i 8 j k) (40 i 120 j 30k)
i
MO 3
j
k
8
1
,
MO 360 i 50 j 680k
40 120 30
4.3 Bir kuvvetin bir eksene göre momenti
Δ
MA
MΔ
A
F
B
M
MA U
M U (AB F)
Ux
M Bx Ax
Fx
Uy
Uz
By Ay
Fy
Bz A z
Fz
21
k
Problem 4.3.1
A(3,8,1) ve B(7,–4,4) noktalarından geçen ve 130 N. Şiddetinde olan F
kuvvetinin O(0,0,0) ve C(2,6,3) noktalarından geçen Δ eksenine göre
momentini bulunuz.(koordinatlar metre cinsindendir.)
M
MO U
MO 360 i 50 j 680k
Problem 4.2.1 den
U OC
, U 2 i 6 j 3k
OC
2 i 6 j 3k
dır.
22 62 32
U
7
7
7
M (360 i 50 j 680k) ( 2 i 6 j 3 k)
7
7
7
M 360 2 50 6 680 3 , M 1620
7
7
7
7
M 231, 43Nm.
4.4 Bir kuvvet sisteminin bir noktaya göre momenti ve indirgeme
elemanları ( Bir kuvvet sisteminin statik eşdeğeri)
Bir veya birden fazla sayıda kuvvetten oluşan sisteme kuvvet sistemi denir.
d1
A1
d2
di
Ai
dn
Fn
F1
F2
Fi
An
A2
MO
R
O
Bu n sayıda kuvvetten oluşan kuvvet sisteminin bir uzayın o noktasına göre
momentine bileşke moment denir ve bu bileşke moment her bir kuvvetin bu
noktaya göre moment vektörlerinin toplamına eşittir.
MO
n OAi Fi
i1
Bu n sayıdaki kuvvetin vektörel toplamına geometrik toplam denir.
R
F
n
i
i1
22
Elde edilen bileşke moment ve geometrik toplamın her ikisine birden bu vektör
sisteminin indirgeme elemanları denir.
Bir kuvvet sisteminde bir noktadaki indirgeme elemanlarından faydalanarak
başka noktalardaki indirgeme elemanlarının bulunuşu:
MQ
n QAi Fi
i1
QAi QO OAi
MQ n (QO OAi ) Fi
i1
MQ MO QO R
Problem 4.4.1
Bir kuvvet sistemi A1(5,–3,8) noktasından geçen F1 10 i 8 j 14k ,
A2( 10,8,9)) noktasından geçen F2 15i 22 j 16k , A3(2,10,7) noktasından
geçen F3 6 i 18 j 9k ve A4(0,12,-4) noktasından geçen F4 3i 20 j 8k
kuvvetlerinden oluşmuştur. Bu kuvvet sisteminin
a) O(0,0,0) noktasındaki indirgeme elemanlarını
b) Q(10,12,–6) noktasındaki indirgeme elemanlarını bulunuz.
Çözüm:
a)
R
4 Fi
R F1 F2 F3 F4
,
i1
R (10 i 8 j 14k) (15i 22 j 16k) (6 i 18 j 9k) (3i 20 j 8k)
R (10 15 6 3)i (8 22 18 20) j (14 16 9 8)k
R 22 i 28 j 15k
MO 4 OAi Fi ,
MO OA1 F1 OA2 F2 OA3 F3 OA4 F4
i1
OA1 F1 (5i 3 j 8k) (10 i 8 j 14k)
i
j
k
3 8 22 i 150 j 70k
OA1 F1 5
10 8 14
i
OA2 F2 10
j
k
8
9 70 i 25 j 100k
15 22 16
23
i
OA3 F3 2
j
10 7 216 i 24 j 96k
6 18 9
i
OA4 F4 0
k
j
k
12 -4 16 i 12 j 36k
3 20 8
MO (22 i 150 j 70k) (70 i 25 j 100k) (216 i 24 j 96k) (16 i 12 j 36k)
MO (22 70 216 16)i (150 25 24 12) j (70 100 96 36)k
MO 324 i 89 j 230k
b)
R
F
n
i
,
R 22 i 28 j 15k
i1
MQ MO QO R
QO 10 i 12 j 6k
QO R (10 i 12 j 6k) (22 i 28 j 15k)
i
j
QO R 10 12
22
28
k
6 12 i 18 j 16k
15
MQ (324 i 89 j 230k) (12 i 18 j 16k)
MQ 312 i 71j 214k
4.5 Bir kuvvet sisteminin değişmezleri
a) Bir kuvvet sisteminde kuvvetlerin geometrik toplamı olan R noktadan
noktaya değişmez.
b) Bir kuvvet sisteminde bileşke momentin geometrik toplam üzerindeki
izdüşümü noktadan noktaya değişmez.
İspat:
M Q U R (M O QO R) U R
(QO R) U R 0
( R ve U R aynı doğrultuda olduğundan )
MQ UR MO UR
elde edilir.
Yukarıdaki denklemin her iki tarafı R ile çarpılırsa
MQ R MO R
eşitliği elde edilir. Bu eşitlikten Bileşke moment ile geometrik toplamın skaler
çarpımının noktadan noktaya değişmediği anlaşılır.
24
Problem 4.5.1
Problem 4.4.1 deki kuvvet sistemi için M Q R M O R
gerçekleyiniz.
Çözüm:
R 22 i 28 j 15k
MO 324 i 89 j 230k
MQ 312 i 71j 214k
MQ R (312 i 71j 214k) (22 i 28 j 15k)
MQ R 312 22 71 28 214 (15)
MQ R 8086
MO R (324 i 89 j 230k) (22 i 28 j 15k)
MO R 324 22 89 28 230 (15)
MO R 8086
MQ R MO R 8086
25
eşitliğini
4.6 Dejenere kuvvet sistemleri
Bileşke momentle geometrik toplamın birbiri ile skaler çarpımının sıfır olduğu
kuvvet sistemlerine dejenere kuvvet sistemleri denir.
MO R 0
Bu eşitlik ile aşağıdaki durumlarda karşılaşılır.
4.6.1 ) M O 0 ,
R 0 (sıfıra eşdeğer kuvvet sistemi)
4.6.2 ) M O 0 ,
R 0 (kuvvet çiftine eşdeğer kuvvet sitemi)
R 0 (bileşkeye eşdeğer kuvvet sistemi)
4.6.3 ) M O 0 ,
R 0 (bileşkesi olan vektör sistemi)
4.6.4 ) M O 0 ,
Düzlemsel , bir noktada kesişen ve paralel kuvvet sistemleri dejenere kuvvet
sistemleridir.
4.6.1Sıfıra eşdeğer kuvvet sistemi
MO 0
R0
Sıfıra eşdeğer kuvvet sisteminde
1) Kuvvet sistemi tek bir kuvvetten oluşmuşsa bu kuvvetin şiddeti sıfır olmalı.
2) Kuvvet sistemi iki kuvvetten oluşmuş ise bu kuvvetler aynı doğrultuda ters
yönde ve eşit şiddette olmalıdır.
3) Kuvvet sistemi üç kuvvetten oluşmuş ve birbirine paralel değil ise bu kuvvet
sisteminin geometrik toplamının sıfır olabilmesi için kuvvetlerin oluşturduğu
poligon kapalı bir üçgen olmalıdır. Bu kuvvet sisteminde bileşke momentin sıfır
olabilmesi için bu üç kuvvetin doğrultusu aynı yerde kesişmelidir.
4.6.2 Kuvvet çiftine eşdeğer kuvvet sitemi
R0
MO 0 ,
Bir kuvvet sisteminde Geometrik toplam sıfır Bileşke moment sıfırdan farklı
ise bu kuvvet sistemi tek bir momente eşdeğer olur. Bu moment vektörüne dik
düzlemlerde alınan kuvvet çiftleri ile de bu kuvvet sistemi temsil edilebilir.
Bir kuvvet sistemi tek bir momente eşdeğer ise bu noktadan noktaya değişmez.
MQ MO QO R
ve R 0 olduğundan
MQ MO
olur.
4.6.3 Bileşkeye eşdeğer kuvvet sistemi
R0
MO 0 ,
Eğer bir noktada bileşke moment sıfır ve geometrik toplam sıfırdan farklı ise
bu geometrik toplam sanki sistem tek bir kuvvetten oluşmuş gibi bu sistemi
temsil edebileceğinden bu geometrik toplama bu kuvvet sisteminin bileşkesi
denir.
26
4.6.4 Bileşkesi olan kuvvet sistemi
R0
MO 0 ,
Eğer dejenere vektör sisteminde Bileşke moment ve geometrik toplamın
her ikisi de sıfırdan farklı ise bu iki vektör birbirine dik olmalıdır. Bu vektör
sisteminin bileşkesi bulunabilir.
4.7 Merkezi eksen
Bileşke momentle geometrik toplamın aynı doğrultuda olduğu eksene merkezi
eksen veya vida ekseni denir.
Vida ekseni
R
M
λ(x,y,z)
R
MO
O(0,0,0)
MR
Merkezi eksen üzerindeki bir nokta (x,y,z) ve O(0,0,0) noktasındaki bileşke
moment MO Mx i My j Mzk ise
Bileşke momentin geometrik toplam üzerindeki izdüşümü değişmiyeceğinden
M MR UR
MR MO UR
yazılabilir.
M R M x U Rx M y U Ry M z U Rz
M MR URx i MR URy j MR URz k
Bundan başka geçiş teoremi uygulanarak M aşağıdaki gibi de yazılabilir.
M MO O R
M MO R O
i
R O Rx
x
j
k
Ry
Rz
y
z
R O (Ry z Rz y) i (Rz x Rx z) j (Rx y Ry x) k
R y z R z y M R U Rx M x
R z x R x z M R U Ry M y
R x y R y x M R U Rz M z
27
Problem 4.7.1
Problem 4.4.1 verilen kuvvet sisteminin merkezi ekseninin denklemini
bulunuz. merkezi eksenin yoz düzlemini kestiği noktanın koordinatlarını
bulunuz.
R 22 i 28 j 15k
MO 324 i 89 j 230k
,
M MO R O
M MR UR
MR MO UR
UR
R
R
22 i 28 j 15k
(22) (28) (15)
UR
2
2
2
22 i 28 j 15k
, UR
1493
,
UR 0, 5694 i 0, 7247 j 0, 3882k
MR (324 i 89 j 230k) (0, 5694 i 0, 7247 j 0, 3882k)
MR 209, 273
M 209, 273 (0, 5694 i 0, 7247 j 0, 3882k)
M 119,16i 151, 66 j 81, 24k
M MO (119,16 i 151, 66 j 81, 24k) (324i 89 j 230k)
M MO 204,84 i 240, 66 j 148, 76k
R O (22 i 28 j 15k) (x i y j z k)
i
j
k
R O 22 28 15
x y
z
R O (28 z 15 y) i (15 x 22 z) j (22 y 28 x)k
(28 z 15 y) i (15 x 22 z) j (22 y 28 x)k 204,84i 240, 66 j 148, 76k
28 z 15 y 204,84
15 x 22 z 240, 66
22 y 28 x 148, 76
Bu Lineer denklem sisteminin katsayılar matrisinin determinantı
0
15
15
0
28 22
28
22 15 (22) (28) 28 (15) 22 0
0
sıfır olduğundan bu denklem sistemi birbirinden bağımsız değildir. Bu denklem
sisteminin katsayılar matrisinde sıfırdan farklı 2x2 lik determinant
bulunduğundan bu denklemlerden ikisi birbirinden bağımsızdır.
28
Bu denklemlerin herhangi ikisi birbirinden bağımsız olduğundan bunlardan
herhangi ikisi verilen kuvvet sisteminin merkezi ekseninin denklemi olarak
alınabilir.
22 y 28 x 148, 76
15 x 22 z 240, 66
Merkezi eksen üzerinde
x 0 da
y 6, 762
22 y 28 x 148, 76
z 10, 94
15 x 22 z 240, 66
4.8 Paralel bağlı kuvvet sistemi ve merkezi
y
Ai ,mi
A1 , m1
A3 ,m3
A2 , m2
An , mn
G
F1 m 1U
Fi mi U
Fn mn U
F3 m3U
F2 m 2U
x
o
R
MO
n OAi Fi
z
i1
MO OG
nFi
i1
Fi m i U
(n mi OG n mi OAi ) U 0
i1
i1
29
n
i1 mni miOAi
OG
i1
OG i j k
m
n
i
i1
i1
m
n
n mi y i
xi
,
i
i1
m
n
,
i
n m i
m
n
i1
i1
zi
i1
i
Problem 4.8.1
Paralel bağlı bir kuvvet sistemi A1(3,7,12) noktasındaki 8kg lık m1 kütlesi ,
A2(6,2,–8) noktasındaki 10kg lık m2 kütlesi ve A3(10,–4 ,–5) noktasındaki 3 kg
lık m3 kütlesinden oluşmuştur. Bu kuvvet sisteminin merkezinin koordinatlarını
hesaplayınız.( koordinatlar cm. cinsinden alınmıştır.)
3
nmm
i
i
i1
ix
,
m1x1 m2x2 m3x3
m1 m2 m3
i1
8 3 10 6 3 10
8 10 3
3
mn imi
i1
iy
5, 43cm.
,
, m1y1 m2y2 m3y3
m1 m2 m3
i1
8 7 10 2 3 (4)
8 10 3
3, 05cm.
,
3
i1mn imi
iz
, m1z1 m2z2 m3z3
m1 m2 m3
i1
8 12 10 (8) 3 (5)
8 10 3
,
0, 048cm.
30
BÖLÜM 5
KÜTLE MERKEZİ
5.1 Bir sürekli cismin kütle merkezi
y
A(x,y,z)
dm
G(ξ,η,ζ)
V
x
O
z
OG V
OA dm
dm
V
OG i j k
V
x dm
y dm
z dm
dm
V
,
V
dm
V
,
V
dm
V
31
Problem 5.1.1
R yarıçaplı 2α tepe açılı çember parçası şeklindeki homojen cismin kütle
merkezinin koordinatlarını bulunuz.
Çözüm:
y
x R Cos
d R d
dm d
dm R d
d
α
θ
G
O
x
α
OG
x ekseni simetri ekseni olduğu için
0 dır.
x dm
dm
,
x dm
dm
R Cos R d
R [Sin (Sin )]
,
R d
2
R[ ()]
2R Sin
2
2R
,
OG
RSin
32
Problem 5.1.2
Şekilde gösterilen dörtte bir çember parçası şeklindeki homojen cismin kütle
merkezinin koordinatlarını bulunuz.
Çözüm :
y
y = x doğrusu
G
4
4
O
x
Şekildeki dörtte bir çember parçası için y = x doğrusu simetri ekseni
olduğundan
22 OG
Problem 5.1.1 den
OG
RSin
4
OG RSin ( ) ,
2 2R
4
OG
/ 4
(
)
,
2 2 2R
2R
2
Problem 5.1.3
Şekilde gösterilen yarım çember şeklindeki homojen cismin kütle merkezinin
koordinatlarını bulunuz.
Çözüm :
y
G
2
2
O
x
33
y Ekseni simetri ekseni olduğu için
Problem 5.1.1 den OG
RSin
/2
0 dır.
RSin
, 2R
2
Problem 5.1.4
Yüksekliği h olan üçgen şeklindeki homojen levhanın kütle merkezinin
koordinatlarını bulunuz.
h
dA dy
dm dA
dm dy
h-y
h
dy
y
O
a
A
h
,
dm
A
hy
a
h
a
,
0
h
dy
0
h
(hy y2 )dy
h0
,
y dy
0
a (h y)
h
h0
a
h (h y)dy
h
0
y dy
h
dy
y dm
x
a h3
,
(
h 2 3
a(h2 h2
h
2
h
3
34
h3
a h3
)
,
)
ha h6 2
h2
h2
, a
6
a h
2
Problem 5.1.5
Şekilde ölçüleri verilen dik üçgen şeklindeki homojen levhanın kütle
merkezinin koordinatlarını bulunuz.
y
60mm.
x
30mm.
Problem 5.1.4 den
10mm. ,
30
,
3
20mm.
60
3
Problem 5.1.6
R yarıçaplı 2α tepe açılı daire dilimi şeklindeki homojen cismin kütle
merkezinin koordinatlarını bulunuz.
Çözüm:
y
x
1 Rd 1 R 2d
2
2
dm dA R
1 d2
d R d
2
2
R Cos
3
dA
d
α
θ
G
O
x
α
OG
x ekseni simetri ekseni olduğu için
0 dır.
35
A
x dm
x dm
,
dm
dm
A
2
1
3R Cos ( 2 R 2d)
,
1
2 R 2d
1 R 3 Cos d
3
1
R 2 d
2
2 R Sin
3
, 3 2
R
1 R 3[Sin (Sin )]
3
1
R [ ()]
2
2
OG 2 R Sin
3
Problem 5.1.7
Şekilde gösterilen dörtte bir daire dilimi şeklindeki homojen cismin kütle
merkezinin koordinatlarını bulunuz.
Çözüm :
y
y = x doğrusu
G
4
4
O
x
2 OG
Şekildeki dörtte bir daire dilimi için y = x doğrusu simetri ekseni
olduğundan
42
2
Problem 5.1.4 den
(
) ,
OG
2 RSin
3
RSin ( )
OG
3
/ 4
,
OG
4
4 2R
3
2 4 2R
2 3
4R
3
36
Problem 5.1.8
Şekilde gösterilen yarım daire dilimi şeklindeki homojen cismin kütle
merkezinin koordinatlarını bulunuz.
Çözüm :
y
G
2
2
O
y Ekseni simetri ekseni olduğu için
2
0 dır.
OG 2 RSin
3
Problem 5.1.4 den
2RSin
x
, 4R
3
3 / 2
Problem 5.1.9
Şekilde gösterilen R taban yarıçaplı yarım küre şeklindeki homojen cismin
kütle merkezinin koordinatlarını gösteriniz.
Çözüm:
z
dm r dz
m V
2
r
dz
z
R
o
y
x
yoz düzlemi simetri düzlemi olduğu için
xoz düzlemi simetri düzlemi olduğu için
V
z dm
dm
V
0 dır.
R z r dz
2
R
2
, 0Rz r dz
r2 dz
0 dır.
,
R r dz
0
2
0
0
37
R (zR2 z )dz
R
3
r 2 R2 z2 ,
R
(R2 z 2)dz
0
R
0
,
4
R4
(
)
(R23 4
R3
)
3
4
)
(
4
( 2R )
3 R
,
8
3
3
5.2 Pappus ve Guldinus teoremleri
Dönel cisimlerin yüzey alanlarını ve hacimlerini bulmak için kullanılır.
1.Teorem
Eğer bir eğri kendi düzlemindeki sabit bir eksen etrafında dönerek, dönel bir
yüzey oluşturursa, bu yüzeyin alanı,bu eğrinin uzunluğu ile eğrinin kütle
merkezinin kat ettiği yol çarpımına eşittir.
İspat
Diferansiyel alan = 2π r dL
Tüm yüzeyin alanı = 2 r dL
l
rG
r dL r dL r
dL
r
l
G
L
rG
l
G
l
Tüm yüzeyin alanı = 2 rG L
2.Teorem
Eğer bir yüzey kendi düzlemindeki sabit bir eksen etrafında dönerek, dönel
bir dolu cisim oluşturursa, bu cismin hacmi, bu yüzeyin alanı ile eğrinin kütle
merkezinin kat ettiği yol çarpımına eşittir.
İspat
Diferansiyel hacim = 2π r dA
Tüm cismin hacmi = 2 r dA
G
A
rG
r dA
dA
A
r dA r
r
G
A
A
A
Tüm yüzeyin hacmi = 2 rG A
38
rG
Problem 5.2.1
Kürenin alanının A 4 R2 ve hacminin V
4 R3 olduğunu gösteriniz.
3
Çözüm:
G
G
Kürenin yüzey alanı için:
2R
Yarım çemberin kütle merkezi = rG
Yarım çemberin uzunluğu = L R
Kürenin yüzey alanı= 2 rG L 2
2R
R 4 R2
Kürenin hacmi için:
4R
3
Yarım dairenin kütle merkezi = rG
Yarım dairenin alanı = A
R2
24R R2
Kürenin hacmi = 2 rG A 2 3
4 R3
2
39
3
5.3 Bileşik cismin kütle merkezi
Bir bileşik cismin kütle merkezi bu cismi oluşturan cisimlerin kütle
merkezleri bulunduktan sonra daha önceden çıkarılan paralel bağlı vektör
sisteminin merkezine ait olan formüllerle hesaplanır.
n
i1 mni miOAi
OG
i1
OG i j k
m
n
i
m
xi
n
i
m
yi
n
i
i1
m
n
,
i
i1
i1
m
n
,
i
zi
i1
i1
m
n
i
i1
Eğer bileşik cismi oluşturan cisimlerin yoğunluğu aynı ise yukarıdaki
denklemlerde mi Vi yazılabilir ve lar toplam dışına alınıp
kısaltılabileceğinden dolayı aşağıdaki eşitlikler elde edilir.
n
n
i1nViVi
i1
ix
,
n
i1Vn i Vi
iy
,
i1
i1Vn iVi
i1
40
iz
Problem 5.3.1
Homojen fakat farklı kalınlıklardaki levhalardan şekildeki taralı alan gibi
oluşturulmuş cismin kütle merkezinin koordinatlarını hesaplayınız.
y
¼ daire dilimi
kalınlık 1mm.
kalınlık 2mm.
2
3
1
30
4
x
30
kalınlık 3mm.
90
6
90
5
z
(Ölçüler mm. cinsindendir. )
4R
90 120
3 , y3 4 3
z y
3
1
2
3
4
5
6
x
30
10
0
0
45
10
6
, A R2
3
3
Y
30
10
120/π
15
0
0
6mm
i
i
M=ρA
4050
-450
4050π
-2700
24300
-2025
35898,45
z
A
0
4050
0
-450
120/π 2025π
22,5 -1350
45
8100
15
-675
16036,7
i1
4
ix
,
i1m6 imi yi
,
1149750
35898,45
, A3=2025π
mx
121500
-4500
0
0
1093500
-20250
1149750
,
32, 03mm.
562500 ,
35898,45
15,67mm.
i1
6
i1
6
i1m6 imi
,
iz
1488375
,
35898,45
41,46mm.
i1
41
my
121500
-4500
486000
-40500
0
0
562500
mz
0
0
486000
-60750
1093500
-30375
1488375
Problem 5.3.2
Şekilde gösterilen içi dolu homojen cismin kütle merkezinin koordinatlarını
hesaplayınız.
2
y
1
z
x
3
( Ölçüler cm. cinsindendir. )
z2 42 4R , z2 42 16 47, 093cm. , V2 R2
3
V2 756 2375, 04cm3
2
x y
z
V
1 12 10,5 21
21168
2 12 10,5 47,093 2375,04
3 12 14
6
-1890
21653,04
3
3ViVi
i1
i1
3
259836,5
21653, 04
,
ix
V3 i Vi
i1
iy
,
220742
21653, 04
Vx
254016
28500,5
-22680
259836,5
,
Vy
222264
24938
-26460
220742
12cm.
,
10, 2cm.
i1
3
i1V3 iVi
iz
,
545036
21653, 04
,
i1
42
21 ,
25,17cm.
Vz
444528
111848
-11340
545036
BÖLÜM 6
STATİK
6.1 Giriş
Statik kuvvetler etkisinde cisimlerin denge koşullarını inceleyen bilim
dalıdır. Bu tanımlamada adı geçen kuvvet , cisim ve denge terimlerini
açıklayalım.
Kuvvet: Ele alınan Cisme başka cisimler tarafından uygulanan ve cismin
hareket veya denge durumları ile şeklini değiştiren etkiye kuvvet denir.
Kuvvetler etkinin cinsine göre : Temas etkisi (yüzey kuvvetleri) ve uzaktan
etki ( hacim kuvvetleri) olmak üzere ikiye ayrılır.
Dengesi incelenen cisimle temasta olan mafsal,mesnet,kablo,çubuk gibi diğer
cisimlerden gelen kuvvetler yüzey kuvvetleridir.
Uzaktan etki kuvvetlerine örnek, ağırlık kuvvetleri, manyetik ve elektriksel
alanlardan gelen kuvvetler verilebilir.
Kuvvetler cisme etki bölgesine göre: İç kuvvet dış kuvvet şeklinde ikiye
ayrılır.
F1
F2
F3
F4
F1
F
F2
M
F3
M
F4
F
Şekilde gösterilen F1 , F2 , F3 , F4 kuvvetleri dış kuvvetler, F ve F
kuvvetleri ise iç kuvvetlerdir. İç kuvvetler şekilde gösterildiği gibi cismin
içinde varolduğu düşünülen bir kesitte oluşur.Bu hayali kesitle cisim iki
parçaya ayrılır. Oluşan bu iki ayrı kesitteki iç kuvvetlerin etki tepki ilkesine
göre şiddet ve doğrultuları aynı yönleri zıttır.
43
Kuvvetler cisme mesnetler ve diğer cisimlerden uygulanma durumuna göre :
Bilinen kuvvetler (aktif kuvvetler) ve mesnet veya bağlardan geleceği
düşünülen tepki kuvvetleri (reaktif kuvvetler) olmak üzere ikiye ayrılır.
Aktif kuvvetler: Ağırlık kuvvetleri veya cismin zorlanma koşullarına göre
bilinen dış kuvvetlerdir.
Tepki kuvvetleri : mesnet,mafsal, kablo, çubuk gibi diğer cisimlerin
uyguladıkları kuvvetlerdir. Bu tepki kuvvetlerinin tam zıttı dengesi incelenen
cisim tarafından diğer cisimlere aynı şekilde etkir.
Sürtünmesiz temaslarda tepki kuvveti temas yüzeyine diktir.
İki boyutlu mesnet ve bağlar ile bunlardan cisme gelen tepki kuvvetleri:
Yuvarlanan elemanlar
kavisli yüzey
Çubuk doğrultusunda hareket edebilen
bilezik ve buna mafsallı diğer çubuk
Kanal doğrultusunda hareket
sürtünmesiz
yüzey
kayma yüzeyine
dik tepki kuvveti
tepki kuvveti hareket
doğrultusuna dik
kanal doğrultusuna dik
tepki kuvveti
44
y
Ry
Rx
Sabit silindirik mafsallı
x
Tepki kuvvetinin doğrultusu
bilinmiyor.
y
Rx
Pürüzlü yüzey
x
Ry
Yüzey tepkisinin doğrultusu
bilinmiyor
y
Rx
x
MO
Ry
Bilinmeyen kuvvet ve şiddeti
bilinmeyen moment
Ankastre mesnet
45
Üç boyutlu mesnet ve bağlar ile bunlardan cisme gelen tepki kuvvetleri:
y
x
Ry
tek noktadan küreye temas
z
temas yüzeyine dik tepki kuvveti
y
x
Ry
z
temas yüzeyine dik tepki kuvveti
Sürtünmesiz temas
y
x
Rz
Ry
z
Pürüzlü yüzeyde
Yuvarlanan tekerlek
ray üzerinde
yuvarlanan tekerlek
46
iki doğrultuda bilinmiyen
tepki kuvveti
y
Rx
x
Rz
Ry
Pürüzlü yüzey
z
üç doğrultuda bilinmiyen
tepki kuvvetleri
küresel mafsal
Küresel mafsalın ayrıntılı şekli
y
My
Ry
x
Rz
Rx
Mx
Mz
z
ankastre mesnet
üç doğrultuda bilinmiyen tepki kuvveti
ve üç doğrultuda bilinmiyen tepki momenti
47
y
Ry
Rx
Mx
x
Rz
Z
Üniversal kavrama
üç doğrultuda bilinmiyen kuvvet ve
bir doğrultuda bilinmiyen moment
y
My
Ry
Rz
Mz
x
z
İki doğrultuda bilinmiyen kuvvet ve
iki doğrultuda bilinmiyen moment
.
Eksenel doğrultuda hareket edebilen
silindirik mafsal
48
y
My
Ry
Rz
Rx
x
Mz
z
Üç doğrultuda bilinmiyen kuvvet ve
İki doğrultuda bilinmiyen moment
Eksenel doğrultuda hareket yeteneği olmayan silindirik mafsal
Bunlardan başka ip kuvveti ip doğrultusundadır. Birde ağırlıksız olup uç
noktalarından sürtünmesiz mafsallı ve uç noktaları dışında yük taşımıyan
çubuklardan gelen tepki kuvvetleride çubuk doğrultusunda kabul edilir.
6.2 İç kuvvetler ve kesit zorları
İç kuvvetlerin cismin bir kesiti içindeki bileşenlerine kesit zorları denir.
Kesite etki eden kuvvetin kesite dik bileşenine Normal kuvvet denir.
Kesite etki eden kuvvetin kesit içindeki bileşenine Kesme kuvveti denir.
Kesite etki eden momentin kesite dik bileşenine Burulma momenti denir.
Kesite etki eden momentin kesit içindeki bileşenine Eğilme momenti denir.
6.3 Statiğin temel ilkelerinin geçerli olduğu referans sistemleri
Orijininde güneş bulunan ve yıldızlara doğru yönelmiş koordinat sistemlerine
Newton veya Galileo eksen sistemleri denir. Statiğin temel ilkeleri bu eksen
sitemlerine göre geçerlidir.
Bir Newton eksen sistemine göre sabit hızda öteleme hareketi yapan diğer
eksen sistemleri de Newton eksen sistemidir.
Herhangi bir cisim Newton eksen sistemine göre hareketsiz veya sabit hızda
öteleme hareketi yapıyorsa bu cisim dengededir denir.
49
6.4 Bir maddesel noktanın kuvvetler etkisinde dengesi
Bir maddesel noktaya etki eden bütün kuvvetler aynı noktada kesişeceğinden
dolayı bu kuvvetlerin geometrik toplamının sıfır olması denge için gerek ve
yeter koşuldur.
R0
R Fx i Fy j F z k
F 0
x
,
F
y
0
,
F
z
0
6.5 Bir rijid cismin kuvvetler etkisinde dengesi
Bir rijid cisme etki eden kuvvvet sisteminin sıfıra eşdeğer olması bu cismin
dengesi için gerek ve yeter koşuldur.
R0 ,
MO 0
Fx 0 , Fy 0 ,
Fz 0
Mx 0 , My 0 ,
Mz 0
Böylece en genel durumda üç boyutlu kuvvetler etkisindeki bir cismin
dengesinde denklem sayısı altı olur. Bu denklemlerden altı bilinmiyen
çözülebilir. Üç boyutlu kuvvetler etkisinde dengesi incelenen cisimde
bilinmiyen sayısı altıdan fazla ise böyle sistemlere hiperstatik sistemler denir.
6.6 Rijid cisim sisteminin kuvvetler etkisinde dengesi
Bir rijid cisim sistemine etki eden kuvvet sisteminin sıfıra eşdeğer olması
denge için gerekli fakat yeterli koşul değildir. Bundan dolayı rijid cisim
siteminin elemanlarına ayrılarak incelenmesi gerekir.Her bir eleman için sıfıra
eşdeğerlik koşulu ve birleşme noktalarında etki tepki ilkesi gözönüne
alınarak çözüme gidilir.
6.7 Düzlemsel kuvvetler etkisinde cisimlerin dengesi
Eğer cisme etki eden dış kuvvetler ve mesnetlerden gelen tepkiler aynı
düzlem içinde ise incelenen problem düzlem statik problemidir.
Aynı düzlemde bulunan kuvvetlerin momenti bu düzleme dik olacağından
R 0 , MO 0
dolayı bu durumda
sıfıra eşdeğerlik koşulu aşağıdaki
gibi yazılabilir.
Fx 0 , Fy 0 , M z 0
Böylece düzlemsel kuvvetler etkisindeki bir cismin dengesinde denklem
sayısı üçe inmiş olur. Bu denklemlerden üç bilinmiyen çözülebilir. Düzlemsel
kuvvetler etkisinde dengesi incelenen cisimde bilinmiyen sayısı üçten fazla
ise böyle sistemlere hiperstatik sistemler denir.
50
Problem 6.7.1
1000 kg kütleli bir sabit vinç 2400 kg kütleli bir cismi kaldırmakta
kullanılıyor. Vinç A da sabit B de kayıcı mafsal ile mesnetlenmiştir.
Vincin kütle merkezi G dir. A ve B mesnetlerindeki tepkileri bulunuz.
A
G
2400kg
1,5m
B
2m
4m
Çözüm:
y
RAy
2400g
RAx A
1000g
1,5m
RBx B
x
2m
4m
B deki mesnet kayıcı mafsal olduğu için y ekseni doğrultusunda kuvvet
taşıyamaz. Bundan dolayı B mesneti sadece x ekseni doğrultusunda tepki
kuvveti uygulayabilir.
RB y 0
Fx 0
RAx RBx 0
Fy 0
RAy 1000g 2400g 0
M A 0
RBx 1,5 1000g 2 2400g 6 0
51
Bu eşitliklerden
RBx 107, 256kN
RAx
x
107, 256kN RB
RAy 33,354kN
RA
107, 2562 33,3542
RA 112,32kN
Problem 6.7.2
Hareketli bir kol C ye bağlanmış bir kablo ve A ile B deki sürtünmesiz
tekerlekler yardımıyla dengede tutuluyor. Şekildeki yükleme halinde
kablodaki kuvveti ve A ile B deki tepkileri hesaplayınız.
475mm
75mm 50mm
600N
B C
90mm
A
Çözüm:
475mm
75mm 50mm
600N
SC
B C
RB
90mm
A
RA
A ve B mesnetlerinde sürtünme olmadığı için buradaki tepkiler yatay
doğrultudadır.
52
Fx 0
Fy 0
MC 0
RB RA 0
SC 600 0
RA 90 600 600 0
Bu üç denklemden
RA 4000 Newton
,
RB
A
4000 Newton R
SC 600N
bulunur.
Problem 6.7.3
Yay katsayısı k olan AC iç yayı θ = 600 iken doğal uzunluğundadır.
a) Sistemin denge durumunda θ, W , a ve k arasındaki bağıntıyı bulunuz.
b) Denge durumunda W=80N , a =300 mm ve θ =250 olduğu bilindiğine
göre yay katsayısı k yı hesaplayınız.
W
B
C
θ
A
a
Çözüm:
W
B
C
F
θ
A
a
53
N
a)
F cos N 0
Fx 0
Fy 0
F sin W 0
Bu iki denklemden F
W
sin
eşitliği bulunur. Ayrıca F yay kuvveti F k s denklemi ile hesaplanır.
a
,
s a(2 1 )
Yaydaki kısalma s cosa600 cos
cos
1
F k a(2
cos
)
1
W
)
,
cos
sin
W
b) k
a 2sin tan
2sin tan
k a(2
k 0, 704N / mm
, k
W
ka
80
300 2sin 250 tan 250
k 704N / m
Problem 6.7.4
Aşağıda gösterilen çerçeve küçük bir yapının çatısını desteklemektedir.
Kablodaki gerilme kuvvetinin 150 kN olduğu bilindiğine göre E ankastre
mesnetindeki tepkileri bulunuz.
D
2,25m
A
B
20kN
C
20kN
20kN
20kN
3,75m
1,8m
1,8m
1,8m
1,8m
E
I
4,5m
54
Çözüm:
y
D
A
B
C
6m
20kN
20kN
1,8m
20kN
1,8m
20kN
1,8m
1,8m
E
REx
I
x
θ
ME
4,5m
REy
150kN
Fx 0
Fy 0
ME 0
cos
REy 20 4 150sin 0
ME 20 (1,8 2 1,8 3 1,8 4 1,8) 4,5 150 sin 0
EI
DI
cos 4,5
7,5
sin 6
7,5
RE x 150 cos 0
DE
, sin
DI
, cos 0, 6
,
RE x 150 0, 6
,
DI 7,5m
DI 4,52 62 ,
sin 0,8
,
REy 20 4 150 0,8 ,
RE x 90kN
REy 200kN
RE
90
2
200
2
RE 219, 4kN
ME 20 (1,8 2 1,8 3 1,8 4 1,8) 4,5 150 0,8 0
ME 180kNm.
6.8 Üç boyutlu kuvvetler etkisindeki bir rijid cismin dengesi ile
ilgili uygulamalar
Eğer cisme etki eden dış kuvvetler ve mesnetlerden gelen tepkiler aynı
düzlem içinde değil ise incelenen problem uzay statik problemidir.
R0
, M O 0 sıfıra eşdeğerlik koşulu aşağıdaki gibi yazılabilir.
55
F 0
F 0 , F 0 ,
M 0 , M 0 ,
x
F 0
M 0
y
x
z
y
z
Problem 6.8.1
120kg kütleli ve 1.5m x 2.4m boyutlarındaki dikdörtgen şeklindeki bir
reklam panosu A da küresel mafsal E ile B de birer kablo yardımı ile şekildeki
gibi tesbit edilmiştir. Kablolardaki kuvvetleri ve A mafsalındaki tepki
kuvvetini bulunuz.
y
2,4m
0,6m
D
1,2m
C
0,9m
A
z
E
1,8m
B
0,6m
x
1,5m
Çözüm:
y
2,4m
0,6m
D
1,2m
C
RAy
0,9m
RAy
A
SBD
SEC E
RAz
z
1,8m
B
G
1,2m
x
W=120g
1,2m
56
sıfıra eşdeğerlik koşulu
F 0
M 0
SEC SBD RA W 0
AE SEC AB SBD AG W 0
U EC EC
, U EC (0 1,8)i (0,9 0) j (0, 6 0)k
1,82 0,92 0, 62
EC
A
SEC SECU EC
U EC
,
1,8i 0,9 j 0, 6k
2,1
SBD SBDU BD
,
, U EC 6i 3 j 2 k , SEC 6
EC
U BD BD
BD
EC
3
k S i
7
7
2, 4i 1, 2 j 2, 4k
S
7 7 7
, U BD (0 2, 4)i (1, 2 0) j (2, 4 0)k
2, 42 1, 22 2, 42
U BD
2i 1 j 2k
3, 6
3 3 3
SBD 2S BD
x
y
i S1 BD j 2 SBD k , RA
z k Ri R j R
3
3
3
AG 1, 2 i 0, 75 j
AE 1,8 i ,
AB 2, 4 i ,
U BD
S2EC j
7
,
, W 120g j
M A 0 AE SEC AB SBD AG W 0
1,8 i ( 6SEC i 3 S EC j 2 S ECk ) 2, 4 i ( 2S BDi S1 BD j 2 S BD k )
7
7
7
3
3
3
(1, 2 i 0, 75 j ) (120g j ) 0
1,8 3 SEC k 1,8 2 SEC j 2, 4 1 SBDk 2, 4 2S BD j 1, 2 120gk 0
7
7
3
3
M A ( 4,8 S BD 3, 6 S EC ) j ( 2, 4 S BD 5, 4 S EC 144g) k 0
3
7
3
7
S
BD
EC 0
S
BD
S
4,8
3, 6
4,8
3, 6 S EC 0
3
7
3
7
14, 4 SEC 288g
S
BD
EC 144g 0
S
BD
EC 288g
S
S
2, 4
5, 4
4,8
10,8
7
3
7
3
7
SEC 140g ,
SBD 45g
, SEC 1373, 4N ,
SBD 441, 45N
6
3
2
2
1
2
i
j
S
k
)
(
S
i
S
j
S
EC
EC
BD
BD
BD k )
F ( 7 S
S
EC
7
7
3
3
3
(Rxi Ry j Rz k ) (120g j ) 0
F ( 76S 23 SBD Rx )i ( 73SEC S13BD Ry 120g ) j ( SEC72 23
SBD Rz )k 0
EC
6 SEC 2 S BD Rx 0
6140g 2 45g Rx 0
Rx 150g
7
3
7
3
SEC S BD R y 120g 0 3
3
1
Ry 45g
7
3 1140g 45g Ry 120g
7 0 3
2
2140g
2 SEC 2 S BD Rz 0
Rz 10g
745g Rz3 0
7
3
Rx 1471,5N
Ry 441, 45N
Rz 98,1N
57
Problem 6.8.2
450 N luk bir yük şekildeki gibi bükülmüş bir rijid borunun C köşesine
uygulanmıştır. Boru A da zemine ve D de düşey duvara küresel mafsal ile E
de ise EG kablosu yardımı ile tesbit edilmiştir.
a) EG kablosundaki gerilme kuvvetinin minumum olması için kablonun karşı
duvara bağlandığı G noktası nerde olmalıdır.
b) Bu durumdaki minumum kablo kuvvetinin şiddetini bulunuz.
y
G
D
E
2m
C
2m
4m
P
x
2m
A
4m
z
Çözüm:
y
G ( x,y)
SEG
RDz
RDx
D
B
E
2m
C
RDy
2m
4m
P
0
x
2m
A
RAx
RAz
A
RAy
4m
z
58
SEG kablo kuvvetinin minumum olması için kablonun doğrultusu aynı
kuvvetle AD eksenine göre en büyük momenti verecek şekilde olmalı yani
AD ekseni ile E noktasının oluşturduğu düzleme dik olmalıdır.
ED AD EG
olmalı
EG (x 2) i ( y 4) j 2k , ED 2 i 2k , AD 4i 4 j 2k
i
ED AD 2
j
k
0 2
4 4 2
ED AD 8 i 4 j 8 k
,
8 i 4 j 8 k (x 2) i ( y 4) j 2k
4
(x 2) 8
4x 8 8
( y 4) 4
4 y 16 4
2 8
M AD 0
x0
y5
(DE SEG ) U AD (DC P) U AD 0
DE 2 i 2k ,
DC 2k ,
P 450 j , SEG SEGU EG
U EG EG ,
U EG
2 i j 2k
2i 1 j 2k
,
U EG
2
2
2
EG
3 3 3
(2) 1 (2)
SEG
2 EG
1 EG
2
EG k S i S j
S
3
3
3
U AD AD
,
4i 4 j 2k
2 i 2 j 1 k
,
U AD
U AD
3 3 3
AD
42 42 (2)2
DE SEG (2 i 2k ) ( 2S EGi S1 EG j 2 S EG k )
3
DE SEG
i
j
k
2
0
2
2 SEG 1 SEG 2 SEG
3
3
3
3
3
,
DE SEG
2 SEG i 8 SEG j 2 SEG k
3
3
3
DC P 2k 450 j , DC P 900 i
(DE SEG ) UAD (DC P) U AD [( 2 S EG 900) i 8S EG j 2 S EG k )] (2 i 2 j 1k ) 0
3
4 SEG 600 16 S EG 2 S EG 0
9
9
9
2SEG 600 0
SEG 300 N
59
3
3
3
3
3
Problem 6.8.3
A da ankastre mesnetli ABCDE cismi şekildeki gibi yüklenmiştir.
a) A ankastre mesnetindeki tepkileri hesaplayınız.
b) A ya çok yakın x eksenine dik kesitteki kesit zorlarını bulunuz.
E F2 = 200N
20cm
y
F1 = 200N D
A
B
x
40cm
20cm
F3 = 350N
C
z
F4 = 250N
Çözüm:
E F2 = 200N
20cm
y
F1 =200N D
RA
A
MA
B
x
40cm
20cm
F3 =350N
C
z
F4 =250N
a)
sıfıra eşdeğerlik koşulu
F 0
M 0
A
RA F1 F2 F3 F4 0
M A AD F1 AE F2 AC F3 AC F4 0
F1 ve F2 kuvvet çifti olduğundan geometrik toplamı sıfır bileşke momenti
ise 200 20 j dır.
F3 350 i ,
F4 250 j
, AC 40 i 20 k
R 350 i 250 j
F R M350 i 250 j 0
4000 j (40 i 20 k ) (350 i 250 j ) 0 ,
M
A
A
A
A
M A 5000 i 11000 j 10000k
60
b)
A da ki x eksenine dik kesitteki normal kuvvet RA kuvvetinin kesite dik
bileşenidir.
normal kuvvet = 350N ( Bu kuvvet cismi çekmeye çalıştığından pozitif
alınmalıdır.)
A da ki x eksenine dik kesitteki kesme kuvveti RA kuvvetinin kesit içindeki
bileşenidir.
kesme kuvveti = 250N. 250N
A da ki x eksenine dik kesitteki burulma momenti M A momentinin kesite
dik bileşenidir.
burulma momenti = 5000Ncm
A da ki x eksenine dik kesitteki eğilme momenti M A momentinin kesite
içindeki bileşenidir.
eğilme momenti = 11000 j 10000k
eğilme momenti = 110002 100002 14866 Ncm
61
BÖLÜM 7
SÜRTÜNME
7.1 Sürtünme ve sürtünme katsayısı
W
f
θ
R θ
N
W
P
f
R
θ
N
Yukardaki şekillerde gösterildiği gibi eğim açısı olan bir eğik düzlem
üzerine bırakılan bir cismin nın belli değerlerine kadar dengede kaldığı
bilinir. Aynı şekilde yatay düzlem üzerine bırakılan bir cisme yatay
doğrultuda bir P kuvveti uygulanırsa P nin belli değerlerine kadar cismin
dengede kaldığı bilinir. Bütün bunların nedeni temas eden yüzeyler
doğrultusunda tepki kuvvetlerinin oluşmasıdır. Bu kuvvetlere sürtünme
kuvvetleri denir.
f N tan
Sürtünme kuvvetinin maksimum değeri birbirlerine temasta olan cisimlerin
cinslerine ve temas yüzeylerinin özelliklerine bağlıdır.
dengede kalmak şartıyla nın en büyük değerinin tanjantına sürtünme
katsayısı denir ve ile gösterilir.
=tan maks. ,
fmaks. N
62
metal üstünde metal a0.15-0.60
metal tahta üstünde
0.20-0.60
metal taş üstünde
0.30-0.70
metal deri üstünde
0.30-0.60
tahta tahta üstünde
0.25-0.50
tahta deri üstünde
0.25-0.50
taş taş üstünde
0.40-0.70
toprak toprak üstünde 0.20-1.00
lastik beton üstünde
0.60-0.90
Çeşitli malzemeler için sürtünme katsayıları tablosu
Problem 7.1.1 θ = 600 eğim açılı eğik düzlem ile üzerindeki W = 100 N.
ağırlığındaki cismin sürtünme katsayısı 0.4 dır. P kuvvetinin hangi
değerleri arasında cisim eğik düzlem üzerinde hareketsiz kalır. Bu
sınırlardaki sürtünme kuvvetinin değerlerini bulunuz.
W
P
θ
63
Çözüm:
Cismin aşağı doğru kaymaması için gerekli olan en küçük P kuvveti Pmin.
dır.Bu durumda sürtünme kuvvetinin yönü yukarı doğrudur.
x
W
θ
y
f
Pmin.
N
θ
x ekseni eğik düzlem doğrultusunda ve y ekseni buna dik doğrultuda alınıp
bu düzlemde denge denklemleri aşağıdaki gibi yazılabilir.
F
F
x
0
y
0
Pmin f W sin 0
N W cos 0
f N
Pmin f W sin ,
(1)
N 100 cos 6 , N 50 Newton
f 0, 4 50 ,
Pmin 50 3 20 ,
f 20 Newton
Pmin 66, 6 Newton
Cisim yukarı doğru çıkma meyilinde ve hareketsiz durumda en büyük P
kuvveti Pm aks. dır. Bu durumda sürtünme kuvveti aşağı doğrudur.
x
W
θ
y
f
Pm aks.
N
θ
Bu durumda sürtünme kuvvetinin yönü değiştiğinden sadece birinci denklem
değişir.
F
x
0
Pm aks. 50 3 20 ,
Pm aks. f W sin 0
Pm aks. 106, 6 Newton ,
64
Pm aks. f W sin
66, 6 Newton P 106, 6 Newton
7.2 mesnetlerdeki sürtünmeler
Mesnetlerde temas yüzeyi belli ise sürtünme kuvveti bu yüzeye teğettir. Eğer
mesnet mafsal şeklinde ve temas yüzeyi bilinmiyorsa ise sürtünme momenti
göz önüne alınarak işlem yapılabilir.
Problem 7.2.1 Şekilde görülen hareketli konsol 10 cm. çapındaki bir
borunun üzerinde istenilen bir yüksekliğe konulabilmektedir. Konsolla boru
arasındaki sürtünme katsayısı 0, 25 olduğuna göre , konsolun ağırlığını
ihmal ederek W yükünün taşınabileceği en küçük x uzaklığını bulunuz.
x
W
20 cm.
10 cm.
Çözüm
y
x
W
fA
x
A
NA
20 cm.
fB
NB
10 cm. B
NA 0 NB NA
fA N A ,
F 0
x
N
B
fB NB ,
fA 0, 25 NA ,
fB 0, 25NB
65
F 0
y
NB
M
B
A
0
fA fB W 0
fA fB W
fA fB
W
2
2W N
20 NA 10 fA (x 5)W 0 20 NA 10 fA 5W
W
20 NA 10 fA W x 5W 0 x
x
, x 40 cm.
W
20 2W 10
5W
40W 5W 5W
2
x
,
W
W
Problem 7.2.2 Şekildeki mekanizmada Bilezik ve çubuk arasındaki sürtünme
katsayısı 0, 4 , θ = 600 ve P = 200 N. olduğu bilindiğine göre mekanizma
kranka uygulanan M momentinin hangi değerlerinde dengededir.
P
C
A
M
100 mm.
θ
B
100 mm.
66
Çözüm:
y
f
P
N
C
RAy
x
A RA x SC
M
SC
100 mm.
θ
B
100 mm.
C Bileziğinin yukarı doğru kayma başlangıcında dengesi için :
f N ,
F 0
F 0
N SC cos ,
f 0, 4 SC cos
SC
SC sin f P 0
sin 0, 4 SC cos P 0
y
P
200
SC (sin 0, 4 cos P
SC sin 0, 4 cos , SC sin 600 0, 4 cos
x
f 0, 4 N
SC cos N 0
SC 300, 289 N.
AB çubuğunun dengesi için :
M
A
0
Mmaks. 100 SC cos
Mmaks 100 300, 289 cos ,
Mmaks. 100 SC cos
Mmaks. 15014,5Nmm.
C Bileziğinin aşağı doğru kayma başlangıcında dengesi için :
Bu durumun yukarıdaki şekilden farkı sürtünme kuvvetinin yönü yukarı
doğrudur.
Fy 0 SC sin f P 0 , SC sin 0, 4 SC cos P 0
P
200
SC (sin 0, 4 cos P
SC sin 0, 4 cos , SC sin 60 0, 4 cos
0
SC 187, 613 N. Mmin.
Mmin. 9380, 6 Nmm.
100 SC cos , Mmin. 100187, 613cos ,
9,38 Nm. M 15, 01 Nm .
67
7.3 Halat veya kayış kasnak sürtünmesi
y
α
x
dθ/2
s
θ
dθ/2
s + ds
df
dθ
dθ/2
dN
dθ/2
s1
s2
Silindirik yüzey üzerine sarılı halattan alınan diferansiyel elemanda
(s ds) Cos (d / 2) s Cos (d / 2) df 0
Fx 0
F
y
0
dN (2s ds) Sin (d / 2) 0 denklemleri yazılabilir.
Cos (d/2) =1 , Sin (d/2) = (d/2) ve df = dN
ds = df , dN =dss d , ds = s d
yazılabilir.
ds
d ,
s
S1
s d
S2
0
ln
,
s1
s2
,
s1
s2
e
olduğu bilindiğine göre
elde edilir.
Bu çağda kayış kasnak sistemlerinde düz kayış yerine daha çok aşağıda
gösterilen kesiti V şeklinde olan V kayışları kullanılır.
y
y
dθ
β
β
2df
x
dθ/2
s + ds
dθ/2
s
z
β/2
dN
β/2
dN
2 dN sin(β/2)
s sin d , (s ds) sin d
2
2
V kayışlı kayış kasnak sistemlerinde kayışın her iki yan yüzeyinde temas
olduğundan diferansiyel elemanda sürtünme kuvvetinin iki katı alınır.Normal
kuvvet yerine 2dNsin β/2 alınarak düz kayış için yapılan işlemler tekrar
edilirse
s1
e / sin( / 2)
s2
formülü bulunur.
68
Problem 7.3.1 Bir gemiyi rıhtımda durdurmak için kullanılan halatın
halka şeklinde oluşturulmuş kısmı iskele babasına takılır.Halatın diğer
ucuna gemideki babanın etrafına 4 kere sarıldıktan sonra kuvvet
uygulanır. Halata geminin uyguladığı kuvvet 20kN dır.
görevlinin uyguladığı kuvvet 40N olduğuna göre halat ile baba denilen
silindirik cismin yanal yüzeyi arasındaki sürtünme katsayısını bulunuz.
40 N.
20kN.
Çözüm:
S2 40N.
S1 20000N
S1
e ,
S1 20kN. 20000N. , 4 2 ,
S2
20000
e8
, 500 e8
ln 500 ln e8
40
500 ,
ln8
0, 247
69
8
ln 500 8
Problem 7.3.2 Bir elektrik motoru ile üretilen 60 Nm. lik bir momenti iletmek
için bir yassı kayış kullanılmaktadır. Kayış şekilde görüldüğü gibi 12 cm.
çaplı motordaki kasnaktan aldığı momenti iletmektedir. Kayışla kasnak
arasındaki statik sürtünme katsayısı 0.3 dür. Kayışın her iki kısmındaki
çekmenin , kayma olmasını engelleyecek en küçük değerlerini bulunuz.
600
400
M
Çözüm:
S1
600
S2
400
M
300
A
500
Kayıştaki büyük kuvvet momentin tersi yönünde olur.
S1 e
S2
, 0,3 ,
2, 793rad.
M
A
0
S1
e0,838 ,
S2
180 30 50 ,
S1
2,311 ,
S2
, M S2 R S1 R 0
S1 S2 1000N ,
S1 2,311S2 ,
1600 , 160
S1 2,311S2
S1 S2 M
R
2,311S2 S2 1000N
S1 1762,8 N.
70
rad.
, S1 S2
60
0,12 / 2
S2 762,8 N.
BÖLÜM 8
YAYILI YÜKLER
8.1 Yayılı yüklerin tanımı
Kuvvetler bir yüzeye veya bir hacme etki ederler. Çoğu durumda bu kuvvetler
yerine bunların bileşkesi tek bir kuvvetmiş gibi gözönüne alınır.
Burada yayılı yüklerin tekil yüklere dönüştürülme yöntemlerinden
bahsedilecek.
8.2 Kirişlerde Yayılı yükler
q
Q
dq
x
a
x
ξ
dx
b
Yayılı yükün bileşkesinin şiddeti yayılı yük eğrisi altındaki alana eşittir.
b
Q
dq
dq q dx
a
b
Q q (X)dx
a
Yayılı yükün bileşkesi yayılı yük eğrisi altındaki alanın merkezinden geçer.
b
x q(X)dx
a
b
q(X)dx
a
71
Problem 8.2.1 Basit mesnetli bir kiriş şekildeki gibi yayılı yük taşımaktadır.
mesnet tepkilerini hesaplayınız.
qB 3600N / m
qA 1500N / m
A
B
L = 6m.
Çözüm:
y
QÜ
E
QD
qB 3600N / m
qA 1500N / m
D
A
C
B
x
L/2
RA
RB
2L/3
QD ABCD Dikdörtgeninin alanı , QD L 1500 , QD 9000N.
QÜ CDE Üçgeninin alanı , QÜ L (3600 1500) / 2 , QÜ 6300 N.
QD ABCD Dikdörtgeninin merkezinden geçer.
QÜ CDE Üçgeninin merkezinden geçer.
M A 0 RB L QD 2L QÜ 2L3 0
RB QD 21 QÜ 23
RB 9000 1 6300 2 , RB 8700 N.
2
3
Fy 0 RA RB QD QÜ 0 RA RB QD QÜ
RA 8700 9000 6300 ,
RA 6600 N.
72
Problem 8.2.2 Su dolu tankın altında bulunan 0,5m. X 0,8m. boyutlarındaki
bir kapak A noktasından mafsallıdır. B deki bir çıkıntı yardımı ile aşağı
doğru dönmesi engellenmektedir. Kapak B den bağlanan ipe kuvvet
uygulanarak açılabilmektedir. Kapağın açılabilmesi için ipe uygulanan en
küçük kuvveti bulunuz.
C
P
0,27m.
0,45m.
A
0,48m.
B
0,64m.
Çözüm:
C
0,27 m
P
L1
L2
0,45 m
qA
A
QD
QÜ
qB
0,48 m
B
D
0,64 m
qA 0, 45 0,5 *1000 * 9,81 , qA 2207,3 N / m , qB (0, 45 0, 48) 0,5 *1000 * 9,81
qB 4561, 7 N / m
QÜ Kapağa etki eden yayılı yükte gösterilen üçgenin alanı
QÜ (qB qA ) AB / 2 , QÜ (4561, 7 2207,3) 0,8 / 2 , QÜ 941, 76 N.
QD Kapağa etki eden yayılı yükte gösterilen dikdörtgenin alanı
QD qA AB , QD 2207,30,8 , QD 1765,84 N
2
1 AB
L1 AB , L2
3
2
73
M
A
0 , P
P
BD AD CD
BC
BC BD 2 CD 2 ,
BC
0, 64
2
BC
BD QÜ 2 AB Q1D
3
2
AB 0
CD 0, 27 0, 45 0, 48 , CD 1, 2 m
1, 2 2 , BC 1,36 m
0, 48 P1, 2 0, 64 941,
0,8 0
2 76 0,8 1765,84
1
P 0, 64
1,36
1,36
3
2
P( 0, 64 0, 48 1, 2 0, 64) 941, 762 0,8 1765,841 0,8 0
1,36
1,36
3
2
P(0,33882) 1208, 608 0
P 3567,1 N
74
BÖLÜM 9
KABLOLAR
9.1 Genel bilgi
Kabloların asma köprüler , yüksek gerilim hatları , teleferikler ve yüksek
kulelerin bağlantıları gibi bir çok uygulamaları vardır.Kablolar yükleme
durumuna göre iki guruba ayrılır.
a) Konsantre yükler etkisindeki kablolar
b) Yayılı yükler etkisindeki kablolar
Kabloların eğilmeye karşı direnci sıfır kabul edilir. Bundan dolayı
kablodaki kuvvetin kablo doğrultusunda olması gerekir.
9.2 Konsantre yükler etkisindeki kablolar
A ve B sabit noktalarından bağlı P1 , P2 , . . .
göz önüne alınır.
, Pn yükleri etkisindeki kablo
L
A
y1
y2
y3
d
C1
B
x1
P1
C2
C3
x2
P2
P3
x3
75
Aynı kablonun serbest cisim diagramı aşağıdaki gibi çizilebilir.
L
RAx
A
RAy
y1
y2
y3
d
C1
B
RBx
· D
x1
P1
C2
RBy
C3
x2
P2
P3
x3
Burada A ve B deki tepki kuvvetlerini bulmak için yazılacak olan
F
, Fy 0 , M z 0
denklemler yeterli değildir. Bundan dolayı Bir kablo parçası için denklem
yazmak gerekir. Buda ancak kablo üzerindeki bir noktanın koordinatlarını
bilmeyi gerektirir.
Böylece kablonun AD parçası için aşağıdaki denklem yazılabilir.
x
M
0
D
0
RAx
A
RAy
y1
C1
x1
y
D·
P1
S
x
76
Aynı şekilde düşey yüklerin etki ettiği diğer noktalarda da moment
denklemleri yazılabilir.
RAx
A
RAy
y1
C1
x1
y2
· D
P1
θ
C2
P2
S
x2
Mesnetten itibaren herhangi bir kablo için yazılan
Fx 0 denkleminden
S cos RAx
eşitliği bulunur. Bu eşitlikten büyüdükçe kablodaki kuvvetin şiddetinin
büyüdüğü anlaşılır.
Problem 9.2.1 AE kablosu gösterilen noktalarda üç düşey yük taşıyor. C
noktası sol mesnedin 1 m altında olduğuna göre
a) B ve D noktalarının düzeylerini
b) Kablodaki maksimum eğim ve maksimum çekme kuvvetini bulunuz.
E
4m
D
2 kN
A
C
1m
B
3 kN
6 kN
4m
2m
3m
77
3m
Çözüm:
a) B ve D noktalarının düzeylerini bulmak için önce A mesnedindeki
tepkileri bulmak gerekir . A mesnedindeki tepkileri bulmak için de tüm
kablo ve kablonun ABC kısmının dengesi ayrı ayrı göz önüne alınır.
Tüm kablonun serbest cisim diyagramı:
REy
y
E
REx
RAy
4m
D
2 kN
A
RAx
x
C
1m
B
3kN
6kN
4m
M
E
0
2m
3m
3m
4RAx 12RAy 8 3 6 6 3 2 0 , 4RAx 12RAy 66
(1)
Kablonun ABC kısmının serbest cisim diagramı
y
RAy
A
RAx
x
C
1m
B
3kN
6kN
4m
M
C
0
2m
RAx 6RAy 3 2 0 ,
RAx 6RAy 6 (2)
Bu (1) ve (2) nolu denklemden A daki mesnet tepkileri bulunur.
4RAx 12RAy 66
2 (RAx 6RAy ) 2 6
RAx 9 kN ,
6RAx 54
78
RAy 2,5 kN
B Noktasının düzeyi için kablonun AB kısmının dengesi göz önüne alınır.
y
RAy
A
RAx
x
B
yB
3kN
4m
M
B
0
yB 9 4 2,5 0 yB 1,111 m
yB RAx 4RAy 0 ,
D Noktasının düzeyi için kablonun ABCD kısmının dengesi göz önüne
alınır.
y
RAy
SDE
D
RAx
A
C
θDE
2 kN
1m
B
3kN
6kN
4m
M
D
0
2m
3m
yD RAx 9RAy 5 3 3 6 0 , yD (9) 10,5
yD 1,167 m
79
yD
x
b) Maksimum eğim ve maksimum çekme : Maksimum eğimin olduğu
kablodaki çekme kuvveti Maksimum kuvvettir. Kablodaki kuvvetin yatay
bileşeni mesnetlerdeki kuvvetin yatay bileşenine eşittir.
1,111
,
AB 15,5220
4
arctan 0,111 ,
BC 3,180
2
,
arctan 2,167
CD 35,842
3
(4 1,167)
arctan
, DE 43,36
3
,
9
SDE 12,38 kN
cos 43,360
AB arctan
BC
CD
DE
SDE
80
9.3 Yayılı yükler etkisindeki kablolar.
B
D
A
C
Yukarıdaki Şekilde gösterilen yayılı yük etkisindeki kablonun CD
kısmının serbest cisim diagramı aşağıdaki gibidir.
S
θ
So
Q
Burada Q kablonun CD kısmı boyunca etki eden yayılı yükün
bileşkesidir.
CD kısmına etki eden tüm kuvvetlerin toplamı denge şartından dolayı sıfır
olmalıdır. Böylece S So ve W kuvvetleri uç uca eklendiğinde kapalı bir
üçgen oluşturur.
S
Q
θ
So
S cos SO
S sin Q
S S O 2 Q2
,
tan
Q
SO
81
9.3.1 Yatayda düzgün yayılı yük etkisindeki kablolar (parabolik kablo)
Kütlesi uzunluğu boyunca sabit olan ve birim uzunluğunun kütlesi q
olan yatay bir tablayı taşıyan asma köprünün kablosunu göz önüne alalım.
y
B
A
C(x,y)
·
O
x
Burada kablonun OC kısmının serbest cisim diagramı aşağıdaki gibi
gösterilebilir.
y
S
θ
S
C
So
O
qx
y
x
qx
θ
So
x/2
x
Kablonun OC kısmına etki eden S , So ve qx
kuvvetlerinin toplamının
sıfır olması gerektiğinden bunlar uç uca eklendiğinde bir dik üçgen
oluştururlar.
Bu dik üçgenden faydalanarak aşağıdaki eşitlikler yazılabilir.
S SO2 q x2
2
tan
qx
SO
Ayrıca kablonun OC kısmına etki eden kuvvetlerin C noktasına göre
momenti alınırsa aşağıdaki denklem yazılabilir.
q x x SO y 0
M
C
y
0
2
q x2
2 SO
Bu bir parabol denklemidir.
82
Eğer kablonun iki ucuda aynı yükseklikte ise ve kablonun en alt noktasının
derinliği ile iki uc arasındaki uzaklık biliniyorsa yatayda yayılı yükün
y q x2
denkleminden kablodaki en küçük
şiddeti verildiğinde
2 SO
kuvvet So bulunur. S SO2 q x2
2
denklemine gidildiğinde kablonun
Bu So değeriyle
herhangi bir x koordinatına sahip noktasındaki S değeri hesaplanabilir.
Problem 9.3.1.1
Ab kablosu şekilde görüldüğü gibi yatayda düzgün yayılı bir yükü
taşımaktadır. Kablonun en alt noktası A mesnedinin 3 m altındadır.
Kablodaki maksimum ve minimum çekme kuvveti değerlerini bulunuz.
B
6m
A
3m
q = 5 kN /m
40 m
Çözüm:
Yük yatayda düzgün yayılı olduğundan kablo paraboliktir. Koorninat
başlangıcını C en alt noktasında seçilirse Kablo denklemi
y
q 2
x
2 S0
formunda yazılabilir.
y
B
yB 9 m
9m
A
yA 3 m
C
x
xA
xB
40 m
83
, xB xA 40
xB xA 40
k (xA 40)
9
2
, xA 80 xA 1600 3 xA
yB
,
yB k (xA 40)2
yA
2xA2 80 xA 1600 0 , xA 80 6400 12800
80 19200
, xA
4
4
80 19200
, xA 54, 64 m
veya
ilk kök 40 m
xA
xA 14, 641m
4
den büyük olduğu için göz önüne alınmaz
xA 14, 641m kabul edilir.
xB 25,359 m
yB k xB2 ,
yA k xA2
Kablodaki minimum çekme kablonun an alt seviyesi olan C noktasında
olur. A noktasının hesaplanan koordinatları
konursa S0 bulunur.
3
q 2
x denkleminde yerine
2 S0
5 14, 641m2 ,
S0
6
y
5 14, 641m 2 ,
2 S0
S0 178, 63 kN
Kablodaki maksimum çekme kablonun eğiminin en fazla olduğu B
noktasında olur. B noktasının x koordinatı ve
S0 değeri S SO2 q x2
2
denkleminde yerine konursa
Smaks. 178, 632 52 25,3592 ,
Smaks. 219, 06 kN
tan max 5 25,359 ,
max 35,370
178, 63
84
9.3.2 Kendi ağırlığı etkisinde olan homojen yapıdaki kablo veya zincirin
dengesi
y
B
A
ℓ
C
D(x,y)
c
x
S
θ
dℓ
D
dy
S
ℓ
qℓ
θ
dx
So
So
C
qℓ
, Qq
İşlemleri sadeleştirmek için
c S
göz önüne alınır.
O
S
SO 2 q 2
2
q
S q c2 2
SO q c ,
dx d cos , cos S
O
SO
cS
, dx c 2
dx S d
2
,
d
d
dx
2
1
x
O
,
d
1
c
2
dy dx tan
x c sinh1 c sinh1
2
,
dy
W
SO
c O
dx
,
c
dy dx ,
c
c2
c sinh
dy sinh
Bu son denklem C(0,c) den D(x,y) ye integre edilirse
85
x
c
x
dx
c
xx
dx c
c (cosh x
cosh
1)
y c sinh
c
c
c
O
O
y2 c2
x
2
y c cosh
,
eşitliği bulunur.
c
SO q c , Q q ,
Sqy
x
x
eğer A ve B mesnetlerinin yüksekliği aynı ise
derinlik h yA c olur.
Problem 9.3.2.1 60 N/m ağırlığındaki bir üniform kablo , şekilde
görüldüğü gibi iki A ve noktası arasına asılmıştır.
a) Kablodaki maksimum ve minimum çekme değerlerini
b) kablonun uzunluğunu bulunuz.
A
B
20 m
100 m
Çözüm :
a) Smin SO q c
Smaks q ymaks , Smaks q yB
Eğer koordinat başlangıcı kablonun alt noktasından c kadar altında
alınırsa kablo denklemi
y c cosh
x
şeklinde yazılabilir.
c
y
A
B
yB
c
xB
B noktasının koordinatları
yerine konursa
20 c c cosh 50
c
xB 50 m ,
20 c c cosh
86
yB 20 c kablo denkleminde
50 0
c
denklemi elde edilir.
f (c) 20 c c cosh
bulunur.
cl
50
denklemini sıfır yapan c değeri orta nokta metodu ile
c
cr cl c
2
cu
f (cl )
f (cu )
1
100
50,5
2,59 1021
7,2374
50,5
50,5
62,875
62,875
62,875
64,422
65,195
65,5819
65,5819
65,5819
65,5819
65,5819
65,5819
65,5819
65,58493
65,58493
100
75,25
75,25
69,0625
65,9688
65,9688
65,9688
65,9688
65,7754
65,6787
65,6303
65,6061
65,594
65,58795
65,58795
65,58644
75,25
62,875
69,0625
65,9688
64,422
65,1954
65,5819
65,7754
65,6787
65,6303
65,6061
65,594
65,58795
65,58493
65,58644
65,5857
-6,4841
-6,4841
-0,95075
-0,95075
-0,95075
-0,39713
-0,1315
-0,0014567
-0,0014567
-0,0014567
-0,0014567
-0,0014567
-0,0014567
-0,0014567
-0,0004457
-0,0004457
7,2374
2,7685
2,7685
1,09594
1,26988
1,26988
1,26988
1,26988
0,062988
0,030828
0,014707
0,006629
0,002587
0,000565
0,000565
0,000061
a
cr yeni cr eski
cr yeni
33
19,7
0,00113
c 65,586
yB 20 c yB 20 65,586 , yB 85,586 m
Smin SO q c
Smaks q yB
Smin 60 65,586 ,
Smin 3935,16 N
Smaks 60 85,586 ,
Smaks 5135,16 N
b)
l kablo uzunluğu y 2
2
y2 c2 ,
2
c2 denkleminden bulunur.
y2 c2 ,
2 yB2 c2 ,
109,972 m
87
2 85,586 2 65,5862
0
100
0
BÖLÜM 10
DÜZLEM KAFES KİRİŞ SİSTEMLERİ
10.1 Genel bilgi ve tarifler
Aynı düzlem içinde birbirlerine uç noktalarından bağlanarak bir rijid yapı
oluşturan çubuklar topluluğuna düzlem kafes sistemi denir. Uç noktalarından
bağlanma şekli pratik uygulamalarında kaynaklı birleştirme şeklinde olmasına
karşı hesaplamalarda sürtünmesiz silindirik mafsallı kabul edilir. Ayrıca
çubuklar uç noktaları dışında yüklenmemiş kabul edilir. Böylece çubuklarda
oluşacak iç kuvvetler çubuk doğrultusunda alınabilir.
Kafes kiriş sistemlerinin yapım kolaylığı ucuzluğu ve hafifliği dolayısıyla bir
çok yerde uygulama alanı vardır. Tren köprüleri, vinç kolları ve kuleleri , gezer
köprülü vinçler , yüksek gerilim hattı direkleri , radyo verici antenleri ,Depo ve
çiftlik çatı kirişleri gibi alanlarda uygulamalarına rastlanır.
Kafes sisteminde uç noktalarının birleşme yerlerine düğüm noktaları denir.
10.2 Basit kafes sistemi
Üç çubuktan oluşan kafes sistemi bir basit kafes sistemidir. Bu sistem üç çubuk
ve üç düğüm noktası içerir. Bu sisteme eklenecek iki çubuk düğüm noktası
sayısını bir artırır. Böylece oluşturulacak m sayıdaki çubuk ve n sayıdaki
düğüm noktasından oluşan kafes sistemi de bir basit kafes sistemidir.
m=3
n=3
m=5
n=4
m=7
n=5
88
Bir basit kafes sisteminde
m = çubuk sayısı
n = düğüm noktası sayısı
olmak üzere
2n = m + 3
olur.
Pratt
Howe
Şekil 10.1 Çeşitli çatı kafes sistemi örnekleri
Pratt
Howe
Warren
Şekil 10.2
Çeşitli köprü kafes sistemi örnekleri
89
10.3 Düğüm noktaları metodu ile kafes sisteminin analizi
Kafes sisteminin her bir düğüm noktası için 2 denklem yazılır. n tane düğüm
noktalı bir kafes sisteminde 2n denklem yazılacağından 2n sayıda bilinmiyen
çözülebilir. Toplam çubuk sayısı 2n-3 ve mesnetlerden de 3 bilinmiyen
geleceğine göre denklem sayısı yeterli olur. Ayrıca sistem bütün bir rijid cisim
gibi alınıp dengesi düşünüldüğünde 3 denklem daha yazılabilir. Bundan dolayı
düğüm noktaları metodu ile fazladan elde edilen 3 denklem sonuçların kontrolu
için kullanılabilir.Bir kafes sisteminde çubuk kuvvetlerini bulmadan önce sistem
bütün bir rijid cisim olarak göz önüne alınıp mesnet tepkileri bulunabilir. Daha
sonra düğüm noktalarının dengesi düşünülerek en fazla iki bilinmiyen içerecek
şekilde düğüm noktası seçip işleme başlanır. Çubuklardan düğüm noktalarına
gelen kuvvetler çubuk doğrultularında alınır.Düğüm noktalarındaki kuvvetlerle
çubuklardaki kuvvetler etki tepki ilkesine göre birbirinin tam zıttıdır. Bir düğüm
noktasındaki bilinmiyenler çözüldüğünde bu düğüm noktasına çubuklarla direk
bağlı diğer düğüm noktalarında da birer tane bilinmiyen azalacağından en fazla
iki bilinmiyen içeren düğüm noktalarını bulmak kolaylaşır.
C
A
D
B
P
C
A
D
B
RAx
RAy
P
C
RB
A
B
D
90
Problem 10.3.1 Verilen kafes sistemindeki çubuk kuvvetlerini düğüm noktaları
metodunu kullanarak bulunuz.
6m
6m
20kN
10kN
A
B
C
4m
D
3m
E
6m
3m
Çözüm:
Tüm kafes sistemi için serbest cisim diagramı
6m
6m
20kN
10kN
A
B
y
RC y
C
x
RC x
4m
D
3m
E RE
6m
3m
Tüm kafes sisteminin dengesi
M 0
F 0
F 0
C
3RE 12 20 6 10 0 RE 100kN
x
RC x 0
y
RC y RE 20 10 0
RC y 70kN
91
A düğüm noktası:
SAD
3
5
20kN
A
4
20kN
SAB
5
SAB
4
SAD
3
A düğüm noktasına etki eden kuvvetlerin geometrik toplamı kapalı bir üçgen
oluşturur . Bu kuvvetlerin şiddetleri ile bu üçgenin veya benzer üçgenlerin kenar
uzunlukları
orantılı
SAB
SAD
20 olur.
3
5
SAB 15kN ,
SAD 25kN
4
D düğüm noktası:
SDB
SDB
SDA 25kN
5m
SDA 25kN
6m
SDE
SDE
D
SDB
SDE
5
6
25
5
SDB 25kN ,
SDE 30kN
B düğüm noktası:
SBA 15kN
10kN
B
3
4
SBC
5
4
5
3
SBE
SBD 25kN
B düğüm noktası için denge denklemleri
0 SBC
Fx
F
y
0
3 S BE 15 3 25 0
SBE 37,5kN ( SBE bası yönünde )
5
5
45 25 54 SBE 10 0
SBC 52,5kN
92
E düğüm noktası:
SEB 37,5kN
4
5
SEC
5
4
3
3
E
SED 30kN
RE 100kN
E düğüm noktası için denge denklemleri
F
0 3 SEC 30 3 37,5 0
5
5
Fy 0 4 SEC 100 4 37,5 0
5
5
SEC 87,5kN ( SBE bası yönünde)
x
4 (87,5) 1004 37,5 0 (kontrol için)
5
5
C düğüm noktası: Bu düğüm noktası kullanılarak C deki mesnet tepkileri
bulunabilir. Bu mesnet tepkileri tüm kafes sistemi bir rijid cisim gibi
düşünülerek daha önce bulunduğuna göre burada kontrol yapılır.
RC y 70kN
SCB 52.5kN
RC x 0
C
5
4
SCE 87.5kN
3
C düğüm noktası için denge denklemleri ( Kontrol için )
0 387,5 52,5 0
0 RC x 3 SCE SCB 0
5
Fy 0 54SCE 70 0
Fx
5
4 87,5 70 0
5
93
10.4 Özel düğüm noktaları
Bir düğüm noktasında 4 tane çubuk şekildeki gibi ikişer ikişer aynı
doğrultuda ise burada oluşturulacak kuvvet poligonu paralel kenar olur.
Bundan dolayı aynı doğrultudaki çubuklara etki eden kuvvetlerin şiddeti
birbirine eşit yönü birbirinin zıttı olur.
E
B
SAE
SAB
SAB
A
A
SAC
SAE
SAD
SAD
D
SAC
C
Üç çubuktan oluşan bir düğüm noktasında çubuklardan ikisi aynı
doğrultuda diğeri farklı doğrultuda yerleştirilmiştir.Ayrıca bir P kuvveti bu
düğüm noktasına farklı doğrultudaki çubuğun doğrultusunda uygulandığında
yine bu 4 kuvvet üzerine kurulan poligon paralel kenar şeklinde olur. Paralel
kenarın karşılıklı kenarlarının uzunlukları birbirine eşit olacağından farklı
doğrultudaki çubuk kuvvetinin şiddeti P kuvvetine eşit olur.
Eğer bu P kuvveti kaldırılırsa farklı doğrultudaki çubuğun kuvveti sıfır olur.
P
B
B
A
A
D
D
C
C
94
İki çubuktan oluşan düğüm noktalarında iki çubuk aynı doğrultuda ise bunlara
etki eden kuvvetlerin şiddetleri birbirine eşit yönleri birbirine zıttır. Böyle bir
düğüm noktasına başka bir P kuvveti etki ediyorsa bunun şiddeti sıfır olmalıdır.
İki çubuktan oluşan düğüm noktasındaki çubuklar farklı doğrultularda ise bu
çubuklardaki kuvvetler sıfırdır.
B
A
A
C
B
C
Aşağıda gösterilen kafes sisteminde BM ve FI çubuk kuvvetleri sıfırdır.
FI çubuk kuvveti sıfır olduğu için FJ çubuk kuvveti de sıfırdır.
D
P3
P2
C
P1
B
E
F
RAX A
H
M
RAy
L
K
J
I
P4
RB
95
10.5 Kesim metodu ile kafes sisteminin analizi
Tüm sistemin analizi yerine çubuklardan bazılarına gelen kuvvetler
hesaplanacağı zaman kesim metodu daha pratiktir.
Bu metotta kafes sistemi hesabı istenen çubuktan geçen ve bilinmiyen üç
çubuktan fazla çubuk içermiyecek şekilde bir çizgi ile ikiye ayrılır. Ayrılan
taraflardan birinde yazılacak olan
Fx 0
Fy 0
,
,
M 0
denklemleri ile üç bilinmiyen çözülebilir.
P1
A
P2
P3
B
C
F
P1
A
D
E
P2
B
SBC
SBE
F
E
SFE
Fx 0
Fy 0
ME 0
dan
dan
dan
SBC SBE
FE
SFE 0
BE
P1 P2 SBE BF 0
BE
SBC BF P1 (AB FE) 0
SBE (P1 P2 )
SBC P1
BE
BF
AB FE
BF
Bu elde edilen SBE ve SBC kuvvetleri 1. denklemde yerine konursa
SFE P1
AB FE
FE
(P1 P2 )
BF
BF
elde edilir.
96
Problem 10.5.1 Şekilde gösterilen kafes sistemindeki FH , GH ve GI
çubuklarındaki kuvvetleri bulunuz.
1kN
1kN
1kN
8m
F
1kN
D
H
1kN
B
J
A
L
C
E
5kN
5m
G
5kN
5m
I
K
5kN
5m
5m
5m
5m
Çözüm:
Tüm cismin serbest cisim diagramı
1kN
y
n
1kN
1kN
8m
F
1kN
D
H
1kN
B
J
θ
A
C
E
5kN
RA
5m
G
5kN
5m
I
L
K
5kN n
5m
RL
5m
5m
5m
Tüm cisim için yazılacak denge denklemlerinden RA ve RL mesnet
tepkileri bulunur.
F 0
M 0
y
A
RA RL 5 1 3 5 0
30RL (5 10 15 20 25) 1 (5 10 15) 5 0
RA RL 20kN
sin
FG
RA RL 20kN
RL 7,5kN
RA 7,5 20kN
RA 12,5kN
GL , FL GL 2 FG2 , FL 152 82 , FL 17 m
, cos
FL
FL
sin 8 , cos 15
17
17
97
x
tan
FG
,
GL
tan 8
15
28,07250
kafes sistemi nn doğrusundan geçecek şekilde bir kesitle kesildikten sonra geri
kalan parça için yazılacak denge denklemlerinden istenen çubuk kuvvetleri
bulunur. Çünkü kesit bu çubukları içine alacak şekilde seçilmiştir.
F
1kN
SHF
H
8m
1kN
J
SHG
β
θ
SIG
G
I
L
x
K
RL
5m
sin
GI
, cos
HI
, HI 10
, GH GI 2 HI2
GH
GH
GH 52 (16 )2 , GH
3
481
,
3
5m
8
sin 15
,
481
5m
15
cos
HI
16
3
m
16
481
Kesildikten sonra
SHFgeri kalan parça için denge denklemleri:
F 0
F 0
M 0
x
y
SHF
cos SHG sin SIG 0
sin SHG cos 1 1 RL 0
HI SHF cos GI SHF sin GI 1 GK 1 GL RL 0 ,
G
5
S
S
HF
HF
16
15
8
5 10 15 7,5 0 120 SHF 97,5
SHF 13,8125 kN
3
17
17
17
8 SHG 16
481
1 1 7,5 0
kN
SHG
Fy 0 13,8125 17
16
481
SHG 1,371kN
F
x
0
(13,8125)
)
15 ( 481 15
17
16
481
98
SIG 0
SIG 13,125 kN
BÖLÜM 11
ÇERÇEVE VE MAKİNELER
11.1 Giriş
Birden fazla sayıdaki parçaların mafsallar yardımıyla birleşiminden ortaya
çıkan yapılarda bazı durumlarda kafes sisteminde farklı olarak elemanlara kendi
doğrultuları dışındada ihmal edilemeyen büyüklükte kuvvetler gelebilir.
Bu durumdaki sistemlere çerçeve veya makine denir. Çerçeveler Genellikle
sabittir ve yükleri taşımak için oluşturulur. Makineler ise sabit veya hareketli
olup kuvvetleri iletmek veya değiştirmek için imal edilir. makineler daima
hareketli parçaları içerirler.
11.2 Çerçeveler
Çeşitli kuvvetler etkisindeki n sayıda parçadan oluşmuş bir çerçeveye ait
problemi klasik denge denklemleri ile çözmek için parçalarına ayırmak gerekir.
Çerçeve parçalarına ayrıldıktan sonra her bir parça ayrı bir rijid cisim gibi
düşünülerek denge denklemleri yazılır.Ayrıca birleşme yerlerinde etki –tepki
ilkesi göz önünde bulundurulur.
D
E
F
C
B
W
A
H
99
D
C
E
S
F
W
B
RAx
A
RAy
D
C
RCy
E
-RCx
F
RCx
C
-RCy
SBE
-SBE
B
-SBE
E
B
SBE
RAx
A
RAy
100
W
Problem 11.2.1 Şekilde gösterilen çerçevedeki ACE ve BCD elemanları C de
bir pim ve DE bağlantı çubuğu ile birbirine bağlanmıştır. Gösterilen yükleme
durumunda DE bağlantı çubuğundaki kuvveti ve C den BCD elemanına gelen
kuvvetin bileşenlerini bulunuz.
A
160 mm
480 N
B
150 mm
60 mm
C
D
80 mm
E
60mm
100mm
150 mm
Çözüm:
Tüm cisim için serbest cisim diyagramı
y
RA y
A
RAx
160 mm
480 N
RB
B
150 mm
60 mm
C
D
α
80 mm
x
E
60mm 100mm
150 mm
Tüm cisim için denge denklemleri:
F 0
F 0
M 0
RAx RB 0
x
RAy 480 0
y
RAy 480 N
160 RB 100 480 0 RB 300 N
A
sin
RAx RB
80
150 80
2
2
, sin
8
17
,
cos
, RAx 300 N
150
150 80
2
101
2
, cos
15
17
BCD cismi için serbest cisim diyagramı :
60mm
RB 300 N B
60 mm
100 mm
480 N
RC y
C
150 mm
α
RC x
SDE
BCD cismi için denge denklemleri :
F 0 R S cos 300 0
F 0 R S sin 480 0
(100480
150)S60sin
60 300 100 480 0
M 017(100
300)
x
Cx
DE
y
Cy
DE
C
DE
SDE
SDE 561 N
,
F
F
x
y
8 250
0 RC x (561) 17
15 300 0 ,15RC x 17 561 300 , RC x 795 N
0
RC y (561) 17
8 480 0 ,
RC y 216 N
ACE cismi için serbest cisim diyagramı :
RA y
A
RAx
220 mm
RC x
SDE
C
80 mm
RC y
α
E
100 mm
ACE cismi için denge denklemleri (kontrol için)
RAx RC x SDE cos 0 , (300) 795 561 15
F
0
x
F 0
M 0
y
17
RA y RC y SDE sin 0 , 480 216 561
220 RC x 300 SDE cos 100SDE sin 0
15 100 561
8
0
220 795 300 561
17
17
A
102
8 0
17
0
11.3 Makineler
Makineler kuvvetleri iletmek veya değiştirmek için kullanılan yapılardır. İster
tek bir alet ve komple bir mekanizma olsun tümünde iletilen giriş kuvvet veya
momentleri ile çıkışta oluşturulan kuvvet veya momentler göz önüne alınır.
Bu tür yapıların çözümünde çerçevelerdeki aynı yöntem izlenir. Yani tüm yapı
elemanlarına ayrılıp her bir eleman için temel denklemler yazılır. Ayrıca
birleşme veya temas noktalarında etki tepki ilkesi kullanılır.
Aşağıdaki şekilde gösterilen el makasında AB kolunun A ucuna uygulanan P
Kuvveti bu makasın mekanizması tarafından Q kuvvetine dönüştürülür.
A
P
B
Q
Problem 11.3.1 Aşağıda gösterilen mekanizmayı dengede tutmak için CD
krankına uygulanması gereken MC momentinin şiddetini bulunuz. D bloğu
CD krankına bir pimle bağlanmıştır ve AB elemanında açılmış bir yarık içinde
serbestçe kayabilir.
10 cm
D
B
A
1500 N
600
C
MC
45 cm
30 cm
103
Çözüm :
Tüm cisim için serbest cisim diyagramı:
10 cm
D
B
1500 N
α
600
RAx A
R
C
x
C
AC CD 2 AC CD cos ACD ,
AD
452 102 2 45 10 cos1200
M
C
RA y
RC y
45 cm
30 cm
Tüm cisim için denge denklemleri:
F 0
F 0
M 0
RAx RC x 0
x
RAy RC y 1500 0
y
MC 45 RC y 75 1500 0
A
AD
RAx RC x
2
2
AD 50, 74446 cm
sin
CD sin 600
AD
, sin
10sin 600
50, 74446
9,8260
AB elemanı için serbest cisim diyagramı :
D
B
1500 N
RAx A
RD
RA y
75 cm
M
AB elemanı için moment denklemi :
A
0
AD RD 75 1500 0
RD 2216,991 N
CD Krankı için serbest cisim diyagramı:
10 cm
90- α
D
600
RD
MC
RC x
C
RC y
104
CD Krankı için denge denklemleri :
F 0
x
RC x RD cos 90 0 RC x RD cos 90
RC x 2216,991 cos 90 9,826 , RC x 378,344 N
F
0
y
RC y RD sin 90 0 RC y 2216,991 sin 90 9,826
RC y 2184, 47 N
M
C
0
M C k CD RD 0
MC k (10 cos 600 i 10sin 600 j ) [RD cos(90 ) i RD sin(90 ) j ] 0
MC k [10 cos 600 RD sin(90 ) 10sin 600 RD cos(90 )] k 0
MC 10 cos 600 RD sin(90 ) 10sin 600 RD cos(90 )
MC 10 cos 600 2216,991 sin 80,1736 10sin 600 2216,991 cos80,1736
MC 14199 Ncm
Tüm cisim için denge denklemleri:
F 0
F 0
x
RAx RC x 0
RAx RC x
y
RAy RC y 1500 0
RAx 378,344 N
RAy 684, 47
Tüm cisim için moment denklemi: ( kontrol için )
M
A
0 MC 45 RC y 75 1500 0
14199 45 2184, 47 75 1500 0 0,15 0 alınabilir.( yuvarlatma
hatalarından kaynaklanır.)
105
BÖLÜM 12
KİRİŞLERDEKİ KESİT ZORLARI
KESME KUVVETİ VE EĞİLME MOMENTİ
DİYAGRAMLARI
12.1 Kirişlerde kesit zorları
Bir kirişin enine kesitindeki iç kuvvetlerin ve momentlerin kesit
düzleminde ve kesite dik olmak üzere alınan bileşenlerine kesit zorları denir.
Kirişlerin boyutlandırılmasında kesit zorlarının bilinmesi hesapları kolaylaştırır.
Kesit zorlarının bileşenleri etki şekline göre aşağıdaki gibi isimlendirilir.
Normal kuvvet : Kesite etki eden iç kuvvetin kesite dik bileşeni.
Kesme kuvveti : Kesite etki eden iç kuvvetin kesit düzlemindeki bileşeni.
Burulma momenti: Kesite etki eden momentin kesite dik bileşeni.
Eğilme momenti : Kesite etki eden momentin kesit düzlemindeki bileşeni.
12.2 Kesit zorları için kabul edilen pozitif yönler
Normal kuvvet ve burulma momenti kesitten dışarı doğru ise pozitif kabul edilir.
Kesme kuvveti kesit düzleminin ayırdığı parçalardan sağdakini aşağı doğru
harekete zorluyorsa pozitif alınır.
Eğilme momenti kirişi aşağıya doğru bel verecek şekilde eğerse pozitif alınır.
V
M
V
M
Kesitteki iç kuvvetler ( pozitif kesme kuvveti V ve Pozitif Eğilme momenti M )
Pozitif kesme kuvvetinde dış kuvvetlerin etkisi
Pozitif eğilme momentinde dış kuvvetlerin etkisi
106
12.3 Yayılı yük , kesme kuvveti ve eğilme momenti arasındaki
bağıntılar
q
q(x)
B
A
x
C
D
dx
xC
E
xD
Şekilde yayılı yük etkisindeki basit mesnetli bir kiriş gösterilmektedir. Bu
kirişden alınan bir diferansiyel eleman üzerinde etkiyen kuvvetler ve bu
elemanın dengesi düşünülerek aşağıdaki denklemler yazılabilir.
dx/2
q dx
V
M
M+dM
C
Fy 0
dx
D V+dV
V (V dV) q dx 0
dV= q dx
dV
= q
dx
Böylece kesme kuvvetinin kesit uzunluğu boyunca türevi o noktadaki yayılı
yüke şiddeti eşit yönü ise zıt olur.
107
XE
VE VC q dx
XC
Buradan E ve C noktaları arasındaki kesme kuvveti farkının bu noktalar arasında
yayılı yük diagramı altındaki alana eşit olduğu anlaşılır.
MD 0
(M dM) M V dx q dx
dx 0
2
dM V dx 1 (dx)2
2
dM
V
dx
Bu son ifadeden eğilme momentinin kiriş uzunluğu boyunca türevinin kesme
kuvvetine eşit olduğu anlaşılır.
dM V dx
XE
ME MC
V dx
XC
Buradan E ve C noktaları arasındaki eğilme momenti farkının bu noktalar
arasında kesme kuvveti diagramı altındaki alana eşit olduğu anlaşılır.
12.4 Kesme kuvveti ve eğilme momenti diyagramları
Kiriş kesiti boyunca kesme kuvveti ve eğilme momenti diyagramlarının
çizilmesi bu büyüklüklerin izlenmesi ve buna göre kirişin ölçülendirilmesi
mühendislik açısından önemlidir. Bu diyagramların çiziminde en çok
kullanılan yöntem kesit yöntemidir.
Kesit yönteminde kiriş uzunluğu boyunca bazı özel noktalarından ( tekil
yük etki noktaları yayılı yük başlangıç ve bitiş noktaları) bölgelere ayrılır.
Bu her bölge başlangıcı ve az evveli olmak üzere kesitler alınıp kesitin sol
tarafının dengesi için yazılan denklemlerden kesme kuvveti ve eğilme
momenti değerleri hesaplanır.Elde edilen değerler yardımıyla kesme
kuvveti ve eğilme momenti diyagramları çizilir.
108
Problem 12.4.1 Şekilde görülen kirişte , verilen yükleme durumu için , kesme
kuvveti ve eğilme momenti diyagramlarını çiziniz.
20 kN
10 kN
B
A
D
C
1,25 m
1,5 m
1m
Çözüm:
20 kN
10 kN
B
A
D
1
2
1,25 m
3
RB
4C5
1,5 m
6
1m
RD
Tüm kiriş için denge denklemleri:
F 0
M 0
RB RD 10 20 0
y
RB RD 30 kN
2,5 RD 1, 25 10 1,5 20 0
B
RD 7 kN ,
RB 23 kN
1 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
F
M
10 kN
y
0
1
0
10 V1 0 V1 10 kN
M1 0 10 0 M1 0
M1
V1
2 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
F 0
M 0
10 kN
y
2
10 V2 0 V2 10 kN
M 2 10 x 0 M 2 10 x
M2
x
V2
109
3 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
10 kN
F 0 10 23 V 0
M 0 M 101, 25 0
y
M3
1,25
V3 13 kN
3
3
M3 12,5 kNm
3
V3
RB 23kN
4 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
10 kN
M4
V4
RB 23kN
1,25 m
x
F 0
M 0
y
4
10 23 V4 0 V4 13 kN
M4 10 x 23(x 1, 25) 0 M 4 13 x 28, 75
5 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
20 kN
10 kN
B
A
M5
RB 23 kN
1,5 m
1,25 m
F 0
M 0
y
5
V5
10 23 20 V5 0 V5 7 kN
M5 10 2, 75 23 1,5 0 M5 7 kNm
6 kesitinin solundaki kiriş parçası için serbest cisim diyagramı ve denge
denklemleri :
20 kN
10 kN
B
A
M6
C
1,25 m
RB 23 kN 1,5 m
V6
x
110
F
M
y
0 10 23 20 V6 0 V6 7 kN
6
0 M6 10 x 23(x 1.25) 20 (x 2, 75) 0 , M6 7 x 26, 25
D noktasındaki yüzeyin solundaki kiriş parçası için serbest cisim diyagramı ve
denge denklemleri :
20 kN
10 kN
B
D
A
MD
C
RB 23 kN 1,5 m
1,25 m
VD
RD 7 kN
1m
V 0
F 0 10 23 20 7 V 0
M 0 M 10 3, 75 23 2,5 201 0 , M 0
y
D
D
D
D
D
20 kN
10 kN
B
A
D
1
2
1,25 m
3
RB
4C5
6
1,5 m
1m
RD
13 kN
x
-7 kN
-10 kN
7 kNm
x
-12,5 kNm
111
Problem 12.4.2 Şekilde görülen C de ankastre mesnetli kirişin , verilen yükleme
durumu için , kesme kuvveti ve eğilme momenti diyagramlarını çiziniz.
q0
A
a
B
C
L
Çözüm:
Tüm kiriş için serbest cisim diyagramı ve denge denklemleri :
a
y
3
q0 a
q
2
q0
MC
A
x
x
B
C
RC x
a
RC y
L
F
x
F
M
y
0
0
C
RC x 0
RC y q 0a
RC y q a 0
0
2
2
M C (L a )q a0 0 M C
0
q ax
ax
q0
a
3 2
q
q0
a
q0 a
2
6
qa
0
2
L ,
MC
q0 a
(3L a)
6
112
kirişin A ile B arasındaki bir kesiti için serbest cisim diyagramı ve denge
denklemleri:
(q0 q) x
2
y
qx
q
q0 q
q
MD
A
D
V
x /2
x
(q0 q) x
F
0
y
V
M
D
V
qx 0
2
a
2
0 MD
MB
q0 2 a
2a
q0
6a
3
q
2
0
(q0 q) x
2
, V
2
,
a2 ,
3
3
2
(3q0 x q0 )x2
MD
,
a
6
a q0 a , V B
B noktasında x = a dır.
VB
V
(2q0 q
0
x) x
x q0 x
a
, V q0 2
2a
2
(q0 q)x 2
1
(q0 q)x2 qx2
x qx x 0 M D
(q0 a x q0 ) x
M D (2q q)x2
0
6
q0
MD
6a
2
0
a
q
2
MB
q0
3
2
a
2
3
q
x 0 x2
113
kirişin B ile C arasındaki kesitlerinde serbest cisim diyagramı
a
3
y
q0 a
2
q0
MC
A
B
E
a
VE
x
Fy 0
M
E
VE q0 a 0
2
VE
M E q 0 a (x a ) 0
0
2
3
q0 a
2
q0 a
ME
2
q0 a2
x
6
C noktasın
q0 ada xq=0 aL2 dir.
MC
2
L
MC
,
6
q0 a
(3L a)
6
Tüm kiriş için kesme kuvveti ve eğilme momenti diyagramı :
y
a /3
q0 a
q
2
q0
MC
A
x
x
B
C
a
RC x
RC y
L
x
V
q0
2a
x q0 x
VB VC
2
q0
a
2
x
q0
M
6a
q0
x3
q0
2
MB
x
q0 a
3
2
a
q0 a2
2
M
x
2
MC
6
q0 a
(3L a)
6
114
Problem 12.4.3 Basit mesnetli AC kirişine B noktasından M B şiddetinde bir
kuvvet çifti uygulanmıştır. Bu kiriş için kesme kuvveti ve eğilme momenti
diyagramlarını çiziniz.
MB
A
B
C
a
L
Çözüm:
Tüm cisim için serbest cisim diyagramı ve denge denklemleri:
MB
A
B
C
a
RA
RC
L
F
M
y
0
RA RC 0
0
M B RA L 0
C
RC RA
RA M
B
, RC M
L
B
L
kirişin A ile B arasındaki bir kesiti için serbest cisim diyagramı ve denge
denklemleri:
A
D
x
RA
F
y
M
0
D
MD
0
VD
RA VD 0 VD RA ,
M D RA x 0
VD
M D RA x ,
MB
L
MD
MB
x
L
kirişin A ile C arasındaki bir kesiti için serbest cisim diyagramı ve denge
denklemleri:
MB
A
B
ME
a
RA
VE
x
F
y
0
VE RA ,
VE VD
115
MB
L
M
ME
E
0
M E M B RA x 0
M E RA x M B
M E M B (1 x )
,
L
MB
x MB
L
AC kirişi için kesme kuvveti ve eğilme momenti diyagramları :
MB
A
B
C
a
RA
RC
L
MB
L
x
MB
L
x
MB
a
L
x
M B (1 x )
M B (1 a )
L
L
116
BÖLÜM 13
VİRTÜEL İŞLER İLKESİ
13.1 Giriş
Buraya kadar incelenen konular içinde bir cisme maddesel nokta modeli ile
yaklaşıldığında bu cisme etki eden kuvvetlerin geometrik toplamının sıfır
olmasının denge şartı için gerek ve yeter şart olduğu söylendi. Aynı şekilde bir
rijid cisme etki eden kuvvet sisteminin sıfıra eşdeğer olması denge için yeter ve
gerek koşul olması problemlerin çözümünde kullanıldı. Bunlardan farklı olarak
çeşitli bağlarla birbirine bağlanarak oluşturulan rijid cisim sistemi olarak kabul
edilen yapılar için etki eden kuvvet sisteminin sıfıra eşdeğer olması yeterli koşul
değildir. Bundan dolayı bu tür problemlerde sistem elemanlarına ayrılarak sıfıra
eşdeğerlik kuralı etki tepki ilkesi ile birlikte her bir elemana ayrı ayrı uygulanıp
çözüme gidilir.
A
F
-F
Şekilde gösterilen A da sürtünmesiz mafsal ile bağlanmış rijid cisim sisteminde
sisteme etki eden dış aktif kuvvetler sıfıra eşdeğer olmasına rağmen sistem bu
kuvvetler etkisinde dengede değildir.
Virtüel işler ilkesi ise rijid cisim sistemine parçalarına ayırmadan uygulanır.
Bundan dolayı özellikle rijid cisim sistemlerinde bağ kuvvetlerinin gerekli
olmadığı durumlarda virtüel işler ilkesi tercih edilir.
13.2 Virtüel yer değiştirme
a) Sistemin bağlarına uygun yer değiştirme
b) Diferansiyel karakterde ( sonsuz küçük)
c) Gerçek olması gerekmeyen , sadece tasarlanan bir yerdeğiştirme
d) Dondurulmuş zaman içinde oluşan bir yerdeğiştirmedir.
e) Bu özellikleri sağlamak koşulu ile keyfi bir yerdeğiştirmedir.
Bir kuvvetin etki ettiği bir A noktasının yer vektörü rA ise bu noktanın
virtüel yer değiştirmesi rA ile gösterilir.
117
13.3 Bir kuvvetin virtüel işi
y
F
A
rA
rA
o
x
z
Bir F kuvvetinin A uygulama noktasının virtüel yer değiştirmesinde bu
kuvvetin yaptığı iş
F rA
13.4 Bir Momentin virtüel işi
Rijid cisim veya sistemlerinin konumu bazen uzunluk yerine açı ile
belirlenebilir. Bu durumda açıdaki virtüel değişimde momentin yaptığı iş
M
dır.
13.5 Virtüel işler ilkesi
Bir maddesel nokta ,maddesel noktalar sistemi ,rijid cisim veya rijid cisim
sisteminin dengede olması için sisteme etki eden dış Aktif kuvvetlerin sistemin
bağlara uygun virtüel yer değiştirmesinde yaptığı işler toplamının sıfıra eşit
olması gerek ve yeter koşuldur.
Bir sisteme etki eden dış aktif kuvvetler A1 noktasında F1 , A2 noktasında
F2 , . . . ve An noktasında Fn olsun. Bu noktaların virtüel yer değiştirmesinde
bu kuvvetlerin yaptığı virtüel işler toplamının sıfır olması bu sistemin dengesi
için gerek ve yeter koşuldur .
F1 rA1 F2 rA2
Fn rAn
118
Problem 13.5.1 Bir hidrolik kaldırma platformu 1000kg kütleli yükleri
kaldırmakta kullanılıyor. Platformun aşağı yukarı hareketi her iki tarafında aynı
uzunluklu bağlantı çubukları yardımı ile eşit kuvvet uygulayan hidrolik
silindirler tarafından gerçekleştirilmektedir. Aşağıdaki şekilde tek bir bağlantı ve
tek bir silindir gösterilmektedir. θ = 600 , a = 0,7 m. L = 3,2 m. için hidrolik
silindirlerin uyguladığı kuvveti bulunuz. ( ED BD a )
d
½W
A
B
C
2a
D
θ
E
G
H
½L
½L
Çözüm:
y
d
½W
I
A
B
C
2a
D
SHD
θ
x
RE x
E
RE y
G
½L
H
RG
½L
Virtüel iş ilkesi:
0 0,5W rI SHD rD 0
W mg j ,
SHD SHDU HD
, rI d i 2a sin j ,
119
rD a cos i a sin j
U HD HD
,
HD (L a cos ) i a sin j ,
HD (L a cos ) 2 (a sin )2
HD
HD
L2 a2 2aL cos ,
SHD
SHD (L a cos )
L2 a2 2aL cos
rD a sin i a cos j
rI 2a cos j ,
0
0, 5mg j (2a cos j ) (
S
coscos
)
L HD(L
a a2aL
i
2
mga cos
mga cos
L a 2aL cos
2
2
SHD L a sin
SHD a sin
L2 a2 2aL cos
(SHD a sin )a cos
L2 a2 2aL cos 0
mga cos
L a sin
L a 2aL cos 0 SHD
L2 a2 2aL cos
2
2
mg
L2 a2 2aL cos
L tan
1000 9,81
3, 2 tan 600 3, 22 0, 72 2 0, 7 3, 2 cos 600
SHD
SHD
,
SHD 5157, 2N
Problem 13.5.2 Şekilde gösterilen mekanizmayı dengede tutmak için CD
krankına uygulanması gereken MC kuvvet çiftini 600 için bulunuz. Blok D
de CD krankına bir pimle bağlıdır ve AB kolunda açılmış bir yarık içinde
serbestçe kayabilmektedir.
D
B
P 150N
θ
MC
C
A
10cm
45 cm
30 cm
Çözüm :
y
D
RAx A
RA y
j
cos
L SHD
a2asin2aL
j ) (a sin i a cos j) 0
2
2
SHD (L a cos ) a sin
i
C
45 cm
RC y
120
P 150N
θ
MC
RC x
B
10cm
30 cm
x
0 MC P rB 0
MC P yB 0
yB AB sin
AD sin CD sin , sin
CD
AD
sin ,
AD 452 102 2 45 10 cos(180 )
AD 50, 7445cm , arcsin(CD sin )
AD
, AB 45 30
cos , AB 76,117cm ,
AD 2125 900 cos , 600 için
arcsin(
9,8260
10 sin 600 ) ,
50, 7445
10
761,17
sin
sin ,
yB
900
cos
)
2125 900 cos
yB 761,172125
(2125
900
cos
sin
sin
1/ 2
yB ( 761,17 (2125 900 cos )
1
2
y
9,
466
B
3/ 2
(900sin ) sin 761,17 (2125 900 cos )
0 MC 150 9, 466 0 MC 150 9, 466 0
1/ 2
cos )
MC 150 9, 466
MC 1419,9 Ncm
13.6 Çok serbestlik dereceli sistemlerde virtüel işler ilkesi:
Bir sistemin hareketi esnasında her an için konumunu belirleyen açı uzunluk
gibi değişkenlere genelleştirilmiş koordinatlar denir. Genelleştirilmiş
koordinatların birbirinden bağımsız olan sayısına serbestlik derecesi denir.
Çok serbestlik dereceli sistemlerde virtüel işler ilkesi uygulanırken serbestlik
derecesini belirleyen genelleştirilmiş koordinatların her seferinde bir tanesinin
değişimine izin verilip serbestlik derecesi kadar denklem elde edilir.
121
Problem 13.6.1 Her birinin uzunluğu l ağırlığı W olan üç çubuk birbirlerine
mafsallıdır .Birinci çubuk ayrıca sabit mesnede mafsallıdır ve son çubuğun
ucuna P kuvveti uygulanmıştır. Sistem düşey düzlemde olduğuna göre denge
durumunda çubukların düşey doğrultu ile yaptıkları açıları P kuvveti ve W
ağırlığına bağlı olarak bulunuz.
A
AB
x
W
GAB
B
W
W
GBC
BC
C
D
P
CD GCD
y
Çözüm:
0
yGAB
W rGAB W rGBC W rGCD P rD 0
W yGAB W yGBC W yGCD P xD 0
l cos AB , yGBC l cos AB cos BC , yGCD l cos AB
l
2
2
xD l sin AB l sinBC l sinCD
yGAB sin AB AB , yGBC l sin AB AB sin
l
l
yGCD l2sin AB AB l sin BC BC sin CD CD 2
l
BC
l cos BC l cos CD
2
BC
2
xD l (cos AB AB cosBC BC cosCD CD )
0
W ( l sin AB AB l sin AB AB l sin BC BC l sin AB AB l sin BC BC l sin
2
2
2
Pl (cos AB AB cosBC BC cosCD CD ) 0
W ( sinAB AB sin AB AB sin BC BC sin AB AB sin BC BC sin CD CD )
1
1
1
2
2
P(cosAB AB cosBC BC cosCD CD ) 0
Her bir denklem için bir açıya değişim verilir.
0,
0
AB0 0,
için AB
WBC( sinABCDAB
AB
AB
1
2
W ( sinAB ) P cosAB 0
5
2
sin
sin
tanAB
2P
5W
122
2
AB ) P cos AB AB 0
CD
CD )
AB 0 , BC 0 , CD 0
0 W ( sinBC BC siniçin
BC
BC ) P(cos
1
2
W
3
sinBC P cosBC 0
2
AB 0 , BC 0 , CD 0 için
0 W ( sinCD CD ) P(cos
1
2
W
1
sinCD P cosCD 0
2
2P
3W
tanBC
CD
CD ) 0
tanCD
2P
W
123
BC
BC ) 0