YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
Proje Adı – Proje No
IŞIĞI TAKİP EDEN KAFA-PROJE 2
Proje Raporu
Adı, Soyadı, Öğrenci Numarası
SİNAN KAYA- 11067020
16.01.2013
İstanbul
İÇİNDEKİLER
1.ÖZET.......................................................................................................................................................3
2.PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ..........................................................................................3
3.SONUÇLAR ve DEĞERLENDİRME............................................................................................................9
4. REFERANSLAR.....................................................................................................................................10
1. ÖZET
Devre için gerekli parçalar alınnmıştır ve parçaların devredeki işlevleri
araştırılmıştır. Devre breadboarda kurulmuştur. İsteğe göre baskı devre veya
pertinaksa kurulabilir. Devre şemasından devre kurulmuştur. Devrede
motor yön kontrolü için h bridge devresi kullanılmıştır. Ayrıyetten devrede
farklı gerilim ihtiyacı olduğundan dirençlerle gerilim bölme işlemi
uygulanmıştır. Devre çalışır hale geldiğinde ldrler (fotoseller) motorun
üzerine 60 derece oluşturacak şekilde sabitlenir. Devreye 9V gerilim
uygulandığında motorun herhangi bir ışık kaynağına doğru yöneldiği
görülecektir
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
Projede
LDR'lere
gelen
ışıKlara
göre
motorun
yönünün
değişmesi
amaçlanmıştır. LDR'leri motorun üzerine koyunca da motor ışık kaynağına
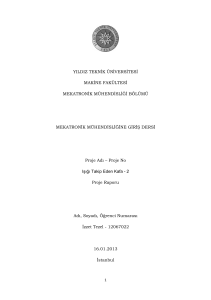
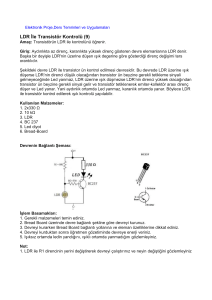
yönelir. Devrenin İSİS'te çizilmiş devre şemasını aşağıda görebilirsiniz.
R1
C1
C2
100n
100u
1
15K
LDR1
TORCH_LDR
8
2
U1:A
3
1
RV1
2
Q1
Q3
BC327
BC337
4
10K
D1
D3
1N4001
1N4001
D2
D4
1N4001
1N4001
1
LM358
LDR2
2
TORCH_LDR
8
U1:B
5
7
R2
6
4
15K
LM358
Q2
Q4
BC327
BC337
MALZEME LİSTESİ
-DİRENÇLER
R1,R2,P:15K,22K,10K
-D1-D4 4001
- KONDANSATÖRLER
C1,C2: 100n, 100uf-16v
- TRANSİSTÖRLER
Q1,Q2: BC327 PNP
Q3,Q4: BC337NPN
-ENTEGRE
LM358
-DİĞER
2 ADET LDR, 3V DC MOTOR
Devremiz ve malzemelerimiz şekildeki gibidir. Şimdi devremizi alt devrelere
bölerek inceleyelim. Devrede motor her iki tarafada döneceğinden motoru
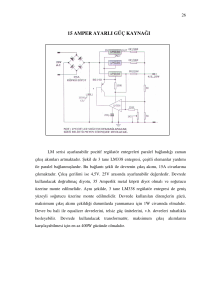
kontrol etmemiz gerekir. Devremizde motor yön kontrolünü sağlamak için
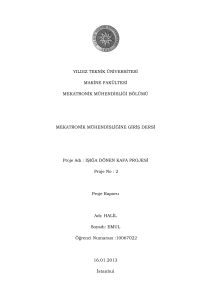
özel h köprüsü (h bridge) kullanılmıştır. H köprüsünü devrede 4 adet
transistör ve 4 adet diyot ile oluşturulmuştur. Devrede kullandığımız h
köprüsü şu şekildedir.
Q1
BC327
Q2
BC327
Q3
D1
D2
1N4001
1N4001
D3
D4
1N4001
1N4001
BC337
Q4
BC337
H bridge devresinde eğer Q3 ile Q2 resistörlerine gerilim geldiğinde motor
saaat yönünde ,Q4 ve Q1 yönünde gerilim geçirdiğinde saat yönünün tersine
döner.
Burada diyotlar resistörlere ters akım gelmesini engellemek için
kullanılmıştır. Transistörler ters akım geldiğinde yanabilirler. Transistörler
2,3,4 bacaklı olabilirler. Devrede 3 bacaklı transistör kullanılmıştır. 2 tip
transistör vardır. PNP veya NPN'dir.
NPN transistörlerden kalın olan N maddesi kollektör (collektor), kollektöre
göre daha ince olan N maddesi emitör (emitter) ve çok ince olan p maddesi
ise beyz (base) bacağıdır. PNP transistörler ise daha kalın olan p maddesi
kollektör (collektör), kollektöre göre daha ince olan p maddesi emitör(emitter)
ve çok ince olan n maddesi beyz (base) bacağından olusur.
collektor=toplayıcı: Akım taşıyıcıların harekete başladığı bölge.
base=taban: Transistörün çalışmasını etkileyen bölge.
emitter=yayıcı: Akım taşıyıcıların toplandığı bölge.
AKIM VE GERİLİM YÖNLERİ
AKIM YÖNLERİ
NPN TRANSİSTÖRDE AKIM YÖNÜ
1.Emiterde ; transistörden dış devreye doğrudur, yani okun olduğu yöndedir.
2. Beyz ve kollektörde ; transistörden dış devreye doğrudur.
PNP TRANSİSTÖRLERDE AKIM YÖNLERİ
1.Emiterde ; dış devreden transistöre doğrudur , yani okun olduğu yöndedir.
2.Beyz ve kollektörde ; transistörden dış devreye doğrudur.
Devrede kullandığımız diğer parça diyotlar ise akımı tek yönlü geçiren devre
parçasıdır.
NPN TRANSİSTÖRLERDE GERİLİM YÖNLERİ
1.Emitere; negatif (-) yük uygulanır.
2.Base'e pozitif(+) gerilim uygulanır.
3.Collektore pozitif (+) gerilim uygulanır.
PNP TRANSİSTÖRLERDE GERİLİM YÖNLERİ
1.Emitere pozitif(+) yük uygulanır.
2.Base 'e negatif(-) yük uygulanır.
3.Collektore negatif(-) yük uygulanır.
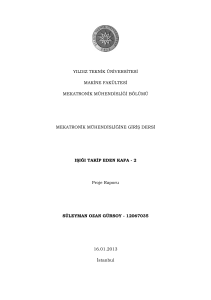
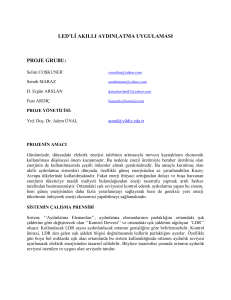
OPAMPLAR
Devre geneline bakarsak devremizde lm358 entegresi bulunmaktadır. Bu
entegre 2 tane opamptan oluşmaktadır. Opamplarda 2 giriş ve 1 çıkış
bulunmaktadır. Opamplar gerilim karşılaştıcı olarak görev yaparlar.
Şekildeki yapı gerilim karşılaştırma devresidir. Bu yapıya göre;
Vgiriş > Vref ; Vout = Vcc
Vgiriş < Vref ; Vout = -Vcc olur.
Yani girişin gerilimi referanstan büyükse çıkışa pozitif besleme gerilim
değerini yansıtır. Tam tersinde ise negatif besleme gerilim değerini yansıtır.
Bu devrede ldr ve dirençler kullanılarak gerilim bölme işlemi uygulanmıştır.
LDR' ler üzerine düşen ışık şiddetiyle direnci değişen devre elemanlarıdır.
DEVRENİN ÇALIŞMA MANTIĞI
Devrede hedefimiz LDR' ye gelen ışığın yönüne göre motorun yönelmesini
sağlamaktır. Devreyi kurduktan sonra LDR1'e ışık geldiğinde ordan geçen
gerilim artar. Bu düşük gerilim LM358 in 2 ve 5 bacaklarına gelir. 2 bacağı 3
bacağından daha büyük gerilime sahip olduğundan 1 çıkışından nötr değer
çıkar diyebiliriz. 5 bacağına gelen gerilim ise 6 bacağından yüksek
olacağından burdan da 7 bacağından pozitif(+) gerilim çıkar ve h köprüsüne
7 bacağından çıkan pozitif gerilim ulaşır. Gelen gerilim (+) olduğundan Q2
bacağına geçemez. Çünkü ordaki PNP bu gerilimi almaz. Yukarıda PNP
transistörleri anlatmıştık.Q4' ten geçen gerilim diyotlardan dolayı Q1'in
emitörüne gelir. Pozitif gerilim burdan da çıkışa ulaşır. Böylelikle motor
üzerinden gerilim geçtiği için motor saat yönünün tersine döner.
Diğer olasılık ise LDR2'ye ışık geldiğinde ise tam tersi olay gerçekleşir. Ordan
geçen gerilim azalır ve opamlara daha düşük gerilim gelir. Opampların 2 ve 5
bacaklarına düşek gerilim gelir ve böylece 1 bacak çıkışından pozitif (+)
gerilim çıkar 7 bacağından ise nötr gerilim çıkar.1 bacağından gelen gerilim
yine aynı şekilde Q1 (pnp) üzerinden geçmez ve Q3'e gelir. Q3'ten geçen
gerilim diyotlardan dolayı Q2'ye gelir ve buradan çıkışa ulaşır. Böylelikler
motor üzerinden akım geçmiş olur ve motor saat yönünde döner.
Devreye
ışık
çalışabilir.
kaynağından
Bunun
Potansiyometre
ayarlı
ışık
için
verilmediğinde
devrede
dirençtir.
normal
potansiyometre
Normal
ortamda
ortamda
yine
kullanılmıştır.
motor
dönüyosa
potansiyometreyle hassas ayar yapılır yani direnciyle oynanarak opampların
girişlerindeki gerilimleri eşitler. Eşitleyince herhangi bir çıkış gerilimi
oluşmayacağından devre durur.
Devrede son olarak kondansatörler (yük depolayıcılar) ise devredeki voltaj
dalgalanmalarını önlemek ve verimi artırmak için kullanılmıştır.
3. SONUÇLAR ve DEĞERLENDİRME
Yapılan çalışma sonucunda devrenin doğru bir şekilde çalıştığı görülür.
LDR'leri motorun üstüne yerleştirirken motor gücünün büyük önemi vardır.
Gerekirse redüktörlü motor kullanarak tork arttırılmalıdır.
Çalışma sonucunda breadboard kullanımı öğrenilmiştir. Devredeki her bir
parçanın devredeki işlevi nedir ve neden kullanılmıştır bunlar öğrenilmiştir.
Bu
proje
sayesinde
analiz
etme,
araştırma,
sentezleme
yetenekleri
kazandırılır. Herhangi bir sorun karşısında çözüm yolları üretilir. Dc motor
kontrolü nasıl sağlanır gerilim bölücü ve karşılaştırıcı devrede neye yarar
bunlar öğrenilmiştir.
4. REFERANSLAR
http://hilmi.trakya.edu.tr/ders_notlari/yl/NpN_PnP_Transist
orler.pdf
http://www.talkingelectronics.com/projects/H-Bridge/HBridge-1.html
http://ieee.itu.edu.tr/lab/hbridge.pdf
http://www.devreyapimi.com/2011/12/19/h-bridge/
http://www.robotiksistem.com/transistor_nedir_transistor_c
esitleri.html
http://tr.wikipedia.org/wiki/Transist%C3%B6r
http://www.diyot.net/op-amp.htm
http://www.silisyum.net/htm/opamp/opamp.htm
http://ieee.itu.edu.tr/lab/opamp.pdf