YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
Işığı Takip Eden Kafa - 2
Proje Raporu
İbrahim Cem Balcı
12067003
16.01.2013
İstanbul
İÇİNDEKİLER
1. ÖZET ............................................................................................................................. 3
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ ............................................... 3
3. SONUÇLAR ve DEĞERLENDİRME ..................................................................... 22
4. REFERANSLAR......................................................................................................... 23
2
1. ÖZET
Işığı takip eden kafa projesi ilk olarak breadboarda yapıldı. Daha sonra
pilakete geçirilmesine rağmen proje son olarak breadboardda kaldı. Proje
verilen şema üzerinden parçaların breadboarda takılması vasıtasıyla yapıldı.
Çalışmaların
sonucunda
LDR’lerle
ışık
arasındaki
ilişkiyi
anlatmak
gerekirse; (LDR’leri LDR-1 ve LDR-2 diye adlandıralım.) LDR-1 ışık aldığında
motor dönüyor, LDR-2 ışık aldığında motor duruyor; LDR-1 için karanlık
ortam
oluşturduğunda
motor
duruyor,
LDR-2
için
karanlık
ortam
oluşturulduğunda motor dönüyor.
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
Proje oluşturulan breadboard devresi ve motor başına takılan parça ile
oluşturulmuş ışığı takip eden kafa oluşturulmuştur.
Yapılan sistemin çalışma prensibine gelirsek öncelikli olarak mekanik
kısmından
bahsedeceğim
daha
sonra
elektronik
bilgi
verip
devreyi
açıklayacağım. Kafasının çalışma prensibinde karşılaşılan sorunları da
sorunların nasıl aşıldığını, nasıl aşılabileceğini anlatacağım. İlk olarak kafa
konusunda bir bilgi verip kafaya takılan parçaların amaçlarını yazacağım.
Kafaya (Resim - 1) 2 LDR bağlandı bu LDR’lerin bir bacakları devre şeması
gereği lehimlendi. Bu şekilde 3 uç devreye gitmek için hazırdı. Kafayı takip
eden kafanın dönmesi sert kablo nedeniyle gerçekleşmedi. Bunun için izole
tel (Resim - 5) kullandı tellerin uçları kazınıp breadboard ve LDR arasındaki
bağlantı tamamland; ama bu seferde motorun dönmesiyle bir süre sonra
kablolar motora sarılma sorunu çıktı. Bunun için içine motorun girebildiği 3
oluklu dairesel bir parça (Resim - 2) oluşturuldu. İlk önce 2 oluklu köpükten
bir elemanla (Resim - 3) yapılan parça sonra sıkıntı çıkardığı için 3 oluklu
tahtadan bir parça ile değiştirildi. Oluklara lehim yollar örülüp breadboarda
3
gerekli teller verildi. Kafa motorun miline, oluklu parça motorun gövdesine
gelecek biçimde sabitlendi. Motorun havada kalması için tahtadan bir destek
(Resim - 4) yapıldı. LDR’lerle breadboarddaki devre arasındaki ilişki raylı
sistem gibi sürtünerek sağlanmaya çalışıldı.
Resim - 1 (Kafa)
Resim - 2 (3 oluklu dairesel bir parça )
4
Resim - 3 (2 oluklu köpükten bir eleman)
Resim - 4 (Tahtadan bir destek)
5
Resim – 5 (İzole tel)
Şimdi elektronik devreyi anlatacağım bunun için öncelikle kullandığım
breadboardu ve devrenin elemanlarının tek tek tanımlamasını yapacağım.
Breadboardun orta sağ ve orta sol kısmındaki yerlerde enlemesine
bağlantılar en sol ve en sağ taraftaki iki kısmında enlemesine bağlantılar
vardır. Bunu daha anlamanız için sizinle breadboardun içini gösteren bir
resim paylaşacağım. ( Bkz: Resim – 6 Breadboard )
Resim – 6 (Breadboard)
6
Tanımla yapacağım devre elemanları ve diğer kavramlar:
Direnç
Diyot
Kondansatör
Transistör
DC Motor
LDR
Entegre
H Bridge
Direnç
Devrede akıma karşı zorluk gösteren akımı azaltan, kısıtlayan, parçaya
direnç denir. Projede 15K, 22K dirençler ve 10K ayarlanabilir direnç
kullanıldı. Ayarlanabilir dirence potansiyometre denir. Potansiyometre
dışardan ayarlanıp direnç değeri değiştirilebilir. (Bkz: Resim – 7 Devrede
kullandığımız dirençler)
Resim - 7 (Soldan sağa 10K Potansiyometre, 15K, 22K direnç)
7
Diyot
Sadece tek yönde akım geçiren devre elemanıdır. Bir yönden akım geçirirken
diğer yönden akım geçirmez. Devrede 4 adet diyot (4001) kullanıldı. (Bkz:
Resim – 8 Devrede kullandığımız diyotlar)
Resim – 8 (Devrede kullandığımız diyotlar)
8
Kondansatör
Kondansatör elektirik yüklerini kısa bir süre depolayamaya yarayan devre
elemanıdır.
Devrede
2
adet
kondansatör
kullanıldı.
(100
nanofarad
mercimek kondansatör ve 100 mikrofarad – 16V kondansatör) (Bkz: Resim –
9 Devrede kullandığımız kondansatörler)
Resim – 9 (Soldan sağa 100n, 100µF–16v kondansatör)
Transistör
Girişine uygulanan sinyali yükseltmek vasıtasıyla gerilim ve akım kazancı
sağlayan yarı iletken bir devre elemanıdır. PNP ve NPN olmak üzere iki çeşidi
vardır. Transistör 3 kutuplu bir devre elemanıdır:
(C) Kollektör (Toplayıcı) : Akım taşıyıcıların toplandığı yer.
(B) Beyz (Taban) : Transistörün çalışmasını etkileyen yer.
(E) Emiter (Yayıcı) : Akım taşıyıcıların harekete başladığı yer.
9
Bağlantı Şekli
Çıkış Devresi
Gerilimi
Giriş
Akımı
Çıkış
Akımı
Akım
Kazancı
Emiteri Ortak
Sabit
IB
IC
β=IC/IB
Beyzi Ortak
Sabit
IE
IC
α=IC/IE
Kollektörü
Ortak
Sabit
IB
IE
γ=IE/IB
Tablo 1: Transistörde akım kazancı
Çeşitleri:
1-) NPN tipi transistör
İki N tipi yalıtkan maddenin arasına P tipi
yalıtkan
madde
konulmasıyla
oluşan
transistör tipidir. Beyz P tipi yarı iletken
maddesinden
geçişini
oluşmaktadır.
kontrol
eder.
Beyz
elektron
Küçük
akımları
büyütebilir veya büyük akımları küçültebilir.
Daha iyi anlamak için şekli inceleyebilirsiniz.
(Bkz: Resim - 7 NPN tipi transistör)
Resim - 10 (NPN tipi transistör)
2-)PNP tipi transistör
Yapısı NPN transistörle tek fark dışında
aynıdır.
PNP
transistörde
aradaki
yarı
iletken madde N tipi maddeden, etrafındaki
yarı iletken maddeler de P tipi maddeden
oluşmuştur. Daha iyi anlamak için şekli
inceleyebilirsiniz. (Bkz: Resim - 8 PNP tipi
transistör)
10
Resim - 11 (PNP tipi transistör)
2 tane BC327 PNP ve 2 tane BC337 NPN olmak üzere 4 tane transistör
kullanıldır. (Bkz: Resim – 12 Devrede kullandığımız transistörler)
Resim – 12 (Soldan sağa BC327 PNP, BC337 NPN)
DC Motor
Üzerinden geçen elektirik akımıyla mili dairesel biçimde dönen parçadır.
Elektirik akımının yönü değiştirildiğinde milin dönüş yönü de tersine döner.
DC motor denmesinin sebebi doğru akımla çalışmasıdır. (DC = Direct
Current) Motorun içinde dönen rotor ve sabit strator kısımları vardır. Bu
kısımlarda elektirik akımını ileten, manyetik akıyı ileten ve konstrüksiyon
parçaları olmak üzere tekrar kısımlara ayrılır. Devrede kullandığımız motor 3
volt DC motordur. (Bkz: Resim – 13 Devrede kullandığımız motor)
11
Resim – 13 (Devrede kullandığımız motor)
LDR (Forodirenç)
Işığın artmasıyla direnci düşen devre elemanı, dirençle parçanın üstüne
düşen ışık ters orantılıdır. Işık miktarı arttığında direnç azalır, akım artar;
ışık miktarı azaldığında direnç artar, akım azalır. Devrede 2 tane LDR
kullanıldı. (Bkz: Resim – 14 Devrede kullandığımız LDR’ler)
Resim – 14 (Devrede kullandığımız LDR’ler)
12
Entegre
Entegre
yarı
iletken
parçanın
içine
yerleştirilmiş,
küçültülmüş
bir
bir
elektronik
devredir. Biz devrede LM358
(LM358N)
Resim
–
içinde
kullandık.
(Bkz:
15 LM358)
LM358
iki
adet
Op-Amp
(Operational Amplifier) vardır.
Op-Amp
nedir
açıklayalım.
yüksek
yükselteç
önce
onu
Op-Amp
için
kazançlı
diyebiliriz.
bir
DC
Resim – 15 (LM358)
Devreye
dışarıdan bağlanan elemanalr ve bu elemanların sağladığı geri besleme ile
Op-Amp’ın çeşitli özellikleri kontrol
altına
alınabilir.
Devredeki entegremiz LM358’in özelliklerini
inceleyelim. LM358 8 pinli içinde iki tane OpAmp bulunduran bir entegredir. (Bkz: Resim –
16 LM358’in iç yapısı)
Resim – 16 (LM358’in iç yapısı)
13
H Bridge
Akımın akış yönünü dijital olarak kontrol edebileceğimiz yapıdır. H
Bridgenin mantığını daha iyi anlatabilmek için sizle bir örnek paylaşacağım.
Şekildeki devre 4 giriş ile kontrol ediliyor. (Bkz: Resim – 17 Devre)
Resim – 17 (Devre)
A=1 B=0 C=1 D=0 olduğu zaman motor sağa döner. (Bkz: Resim – 18)
Resim – 18
14
A=0 B=1 C=0 D=1 olduğu zaman motor sola döner. (Bkz: Resim – 19)
Resim – 19
A=1 B=0 C=0 D=1 olduğu zaman motor sabit kalır. (Bkz: Resim – 20)
Resim – 20
15
A=1
B=1
C=0
D=0 veya A=0
B=0
C=1
olur. (Bkz: Resim – 21)
Resim – 21
16
D=1 olduğu zaman kısa devre
Devre elemanlarının açıklamasının sonuna geldim şimdi devre için gerekli
parçaları tekrar edip listeleyip devre mantığını açıklamaya çalışacağım.
Direnç : 15K, 22K direnç ve 10K potansiyometre
Diyot : 4 adet 4001 diyot
Kondansatör : 100n mercimek ve 100µF – 16v kondansatör
Transistör : 2 adet BC327 pnp ve 2 adet BC337npn
DC Motor : 3 Volt DC Motor
LDR : 2 adet LDR
Entegre : LM358
Pil veya adaptör : 9V pil veya adaptör (Bkz: Resim – 22)
Breadboard (Bkz: Resim – 23) ya da pilaket (Bkz: Resim – 24)
Resim – 22
17
Resim – 23
Resim – 24 (Devrenin pilakete dökülmüş hali)
Not: Devreyi pilakette yapmak daha zor olduğundan başlangıç olarak
breadboarda yapmanızı tavsiye ederiz.
18
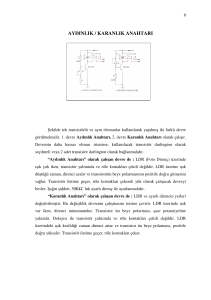
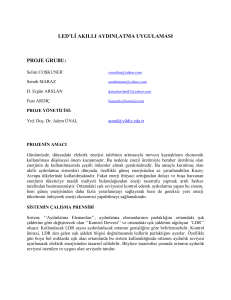
Devre şeması (Resim – 25) aşağıda verilmiştir. Devre şemasına göre
elemanalrın breadboarda yerleştirilmesi vasıtasıyla devre tamamlanmıştır.
Resim – 25
Yapılan projede motor tek yöne döndüğü için diğer projeler üzerinden
düşünülüp diğer projelerin mantığı aşağıda yazılmıştır:
1. LDR’nin aydınlıkta motoru sağa döndürdüğü görülmüştür. Bunun sebebi
ise 1. LDR’nin karanlıkta direnci maksimum olup üzerinden akım geçmesine
izin vermesiyle sağlanır. Işığa göre iç direnci değişen 1. LDR’nin adydınlıkta
direncinin minimuma düşmesiyle motoru sağ yöne doğru döndürür. 2. LDR
ise 1 LDR’nin tam tersi olup karanlikta direnci düşüp üzerinden akım
19
geçirmesine izin verir ve motorun yönünü sola cevirir. R1, P ve R2 dirençleri
Op-Amp’ın giriş uçlarındaki 9v’luk gerilimi düşürüp motorun hızlı yavaş
çalışmasını sağlar. Op-Amp’a gelen giriş voltajlari çıkış ucu olan 1 ve 7 No’lu
uçlara ileterek transistörlere yeterli çıkış voltaji sağlamış olur. Op-Amp’ın 1.
uç çıkışı Q1 ve Q3 transistörlerini iletime sokarak kollektor emiter arası
akım geçmesini sağlar. Bu işlem için transistörlerin beyzine tetikleme voltaji
olan
0.7v
geldiginde
transistor
iletime
geçer.
Yeterli
beyz
voltaji
saglandığında Q1 ve Q3 iletime geçecektir. Q1 ve Q3 transistorleri gerilimi
diyot üzerinde doğrultarak motorun sağa dönmesini saglar. Op-Amp’ın 7.
bacağından çıkan voltaj ise Q2 ve Q4 transistorlerini iletime sokmuş olur ve
diyot
üzerinden
motorun
sola
dönmesini
sağlar
devrenin
çalışması
tamamlanmış olur.
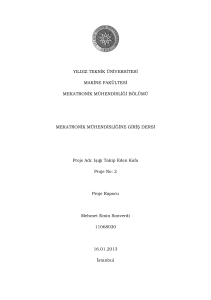
Resim 27- Kafa düzeneğinin SolidWorks’te çizilmiş hali
20
Resim – 26 Devre
Resim 27- Kafa düzeneği
21
3. SONUÇLAR ve DEĞERLENDİRME
Çalışmaların
sonucunda
LDR’lerle
ışık
arasındaki
ilişkiyi
anlatmak
gerekirse; (LDR’leri LDR-1 ve LDR-2 diye adlandıralım.) LDR-1 ışık aldığında
motor dönüyor, LDR-2 ışık aldığında motor duruyor; LDR-1 için karanlık
ortam
oluşturduğunda
motor
duruyor,
LDR-2
için
karanlık
ortam
oluşturulduğunda motor dönüyor. LDR’ler birbirine zıt çalıştığı için motor
yapılan kafaya takıldığı zaman raylı sistem gibi bir LDR’nin ışığı takip etmesi
gerekirdi. Ama sürtünmeden dolayı motorun istediği kadar dönmesini
sağlamak amacıyla yapılan parça işlevsiz kaldı. Sistem mekanik anlamda
yapılan aksaklıklar nedeniyle teorikte tamamlansa da pratik de eksik kaldı.
Projede öğrendiğim devre elemanları ve diğer elemanlar:
Transistör
Entegre
Pilaket
Breadboard
Havşa
Projeden öğrendiğim uygulamalar:
Lehim yapma
Breadboard kullanımı
Devre şemasını breadboarda geçirme
Projeyi tam olarak
yapabilseydim kafasını tamamlardım raylı sistem
mantığını tamamladıktan sonra kablo olmadan istediği kadar dönebilen bir
kafa yapardım. Projeyi başka türlü yapabildeysim oluşturulan sistemi
tekerleklere bağlayıp ışığı takip eden araba oluşturabilirdim.
Projenin
devresini değiştirip basit bir devreden ışığı takip eden araba yapmak
isterdim. Çünkü ışığı takip eden arabayı nasıl yapacağımı mekanik ve
22
elektriksel olarak biliyorum. Ayrıca bu projenin bir kafa yerine bir araba
olması daha ilgi çekici ve sonuçları daha net.
4. REFERANSLAR
Robotik Sistem , 16.01.2013,
http://www.robotiksistem.com/
H Bridge, 16.01.2013,
http://www.devreyapimi.com/2011/12/19/h-bridge/
23