YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
Proje Adı – Proje No
Işığı Takip Eden Kafa - 2
Proje Raporu
Adı, Soyadı, Öğrenci Numarası
İzzet Tezel - 12067022
16.01.2013
İstanbul
1
İÇİNDEKİLER
1.ÖZET…………………………………….. 2
2.PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ……………… 2
3.SONUÇLAR VE DEĞERLENDİRME………………. 10
4.REFERANS……………………………. 11
2
1. ÖZET
Işığı takip eden kafa projesinde LDR'ler yardımı ile DC elektrik motorunun ileri geri
yönde hareket etmesiyle ışıktan faydalanarak istenilen mekanik hareketleri sağlamış
olduk. LDR’lerden çıkan voltajla patansiyometrede ayarladığımız direncin gerilimi OPAMP(entegre) değerlendirilir ve voltaja göre Logic1 veya Logic0 gönderilir ve motor
ışığa doğru dönmeye başlar. Motorun yön değiştirmesi esnasında çıkan zıt
elektromotor kuvvetinden dolayı transistörlerin zarar görmesini diyotlar engeller. Bu
sistemin sonuçlarından faydalanarak uzaya atılan uyduların ışığa yönelmesi
sağlanarak güneş enerjisi maksimum derecede kullanılabilir.
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
Dirençler(R1 :15K, R2 :22K, P :10K), kondansatörler(C1 :100nF, C2: 100µF-16V),
diyotlar(D1-D4 :4007), tranzistörler(Q1-Q2 :BC327 pnp, Q3-Q4 :BC337 npn), LDRler,
motor(3V DC motor) ve entegre(LM 358) kullanılarak yapılan devreden oluşan
sistemde ışığın LDRler üzerindeki etkisi nedeniyle motor sayesinde ışığa dönüş
hareketi gerçekleşir.
3
Resim 2.1: Projenin üstten görünüşü
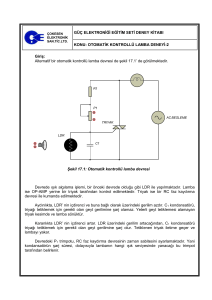
Şekil2.1 : Projenin devre şeması
4
Direnç: Devrede kullanılan R1 ve R2 sabit dirençleri gerilim bölücü direnç olarak
kullanılmakta ve LM358 entegresinin giriş gerilimini ayarlamaktadır.
Potansiyometre: Direnci manuel olarak ayarlamamızı sağlayan devre elemanıdır.
Potasiyometreyi kullanmamızın amacı, LDR'ler karşısına konulan ışık kaynağını,
kafanın istenilen doğrulukta takip edebilmelerini sağlamak içindir. LDR'lerin aynı ışık
şiddetinde farklı değer üretebilmeleriyle karşılaşıldığı için potansiyometre ile ince ayar
yapılır. Potansiyometreler direnç değiştirilmesi yoluyla gerilim bölme, diğer bir deyişle
çıkış gerilimini ayarlama işini yapar.
Resim 2.2: Potansiyometre
LM358 Entegresi: LM358 içerisinde 2 adet OP-AMP bulunan entegredir. Projenin
gerçekleştirilme aşamasında tek entegre yerine 2 adet LM358 entegreyi paralel
bağlayarak da devrenin çalıştığını göstermek istedim.Bu entegreler devrede
karşılaştırıcı olarak kullanılmaktadır. Entegrenin girişlerinden birine diğerinden daha
yüksek voltaj geldiğinde çıkış + oluyorsa tersi durumda çıkış eksi olur. Bu duruma
pencere karşılaştırıcı denir.
5
Şekil 2.2: LM358 entegresinin iç yapısı
Transistörler: Transistörler devrede 2 amaç için kullanılır. Birincisi anahtarlama
elemanı olarak, ikincisi ise yükseltme elemanı olarak kullanılmasıdır. Base, Emiter ve
Kollektör olmak üzere üç ucu vardır. Base'e uygulanan küçük bir akımla Emiter
Kollektör arası iletime geçirilebilir. NPN ve PNP olmak üzere 2 çeşit transistör vardır.
NPN tipi transistörde Base'e pozitif polariteli gerilim PNP tipi transistörde ise Base'e
negatif polariteli gerilim gelmelidir.
Transistörün çalışma şartı: Emiter Base arası doğru polarite uygulanmalı, Kollektör
Base arası ise ters polarmalandırılmalıdır. Buna göre; NPN tipi transistörde Emiter'e
negatif(-), Base ve Kollektör'e pozitif(+) polariteli gerilim gelmelidir. PNP tip
transistörde ise Emiter'e pozitif(+), Base ve Kollektör'e negatif(-) polariteli gerilim
gelmelidir.
6
Şekil 2.3: Transistör çeşitleri ve uçları
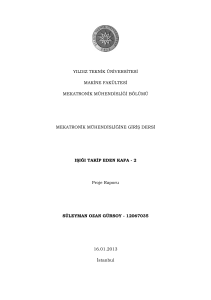
H-Bridge: Aşağıdaki şekilde 4 adet transistörle yapılmış bir H-Bridge devresi
görülmektedir. Bu devrede 2 adet PNP ve 2 adet NPN transistör kullanılmıştır. Bu
devrede A=1, D=1, B=0 ve C=0 yapıldığında motor sağa dönecektir. Tersi durumda,
A=0, D=0, B=1 ve C=1 yapıldığında ise motor sola doğru dönecektir. A=0, D=1, B=0,
C=1 ve A=1, D=0, B=1, C=0 durumlarında ise motor fren yapacaktır. A=1, D=0, B=0,
C=1 ve A=0, D=1, B=1, C=0 durumlarında ise 12V ve toprak kısa devre
olduklarından böyle bir durum devre için çok sıkıntılıdır. H-Bridge yöntemi
kullanılırken hiçbir şekilde bu iki durumun oluşmasına fırsat verilmemelidir.
Tablo 2.1:H-Bridge'in doğruluk tablosu
7
Şekil 2.4: H-Bridge bağlantısı
LDR: Üzerlerine gelen ışığın şiddetine göre direnç değerleri değişen devre
elemanlarıdır. Işığın şiddetine göre ters orantılı olarak direnç değeri değişir.
Resim 2.3: LDR'ler
LDR üzerine ışık düştüğünde valans elektronları ışık enerjisi ile yeterli hıza ulaşıp,
koparak iletkenlik bandına geçerler. Yani LDR, devre akımını oluşturan serbest
elektronlar yönünden zenginleşmiş olur. Bu da LDR direncinin düşmesi demektir.
LDR’nin en çok duyarlı olduğu ışık yeşil ışıktır. Üzerine düşen ışık hüzmesinin
şiddetine bağlı olarak valans bandından iletkenlik bandına geçebilen elektron sayısı
arttığı için LDR’nin direnci de azalır. Ancak, ışık şiddetinin artışıyla iletkenlik bandına
geçebilen elektron sayısı doğru yönde lineer orantıya sahip olmadığı için LDR’nin
direncindeki düşüş de lineer değildir.
8
Bu elemanların dirençleri karanlıkta MΩ seviyesindeki iken yeterli ışık aldığı takdirde
5-10Ω gibi çok küçük değerlere düşebilmektedir.
Bu elemanların ışığa duyarlılığı ışık gören yüzeylerinin büyüklüğüne ve üzerindeki
lensin tipine bağlı olarak değişir. Lens mercek tipi olduğu takdirde duyarlılık
artmaktadır. LDR’ler yapısal hassasiyetlerinden dolayı aşırı ısıda çalışamazlar. Aşırı
ısı altında (maksimum 60ºC) bozulurlar.
Devrede 2 adet LDR kullanmamızın amacı kafanın ışığı takip etme yeteneğinin
arttırırmasıdır. LDR sayısının arttırırmasıyla sistem daha stabil hale getirilebilir.
Diyot: Tek yönlü akım geçiren elektronik devre elemanıdır. Anot ve katot olmak
üzere iki ucu vardır. Anotuna (+), katotuna (-) polariteli gerilim geldiğinde diyot iletime
geçer. Aksi durumda diyot yalıtımdadır. Diyotları bu devrede kullanmamızın amacı
motorun devir yönünün değiştiği esnada motor bobinlerinde meydana gelen zıt
elektromotor kuvvetten dolayı transistörlerin zarar görmesini engellemektir.
Şekil 2.5: Diyot sembolü
9
Bir diyodu doğru yönde polarlamak için Anot gerilimi Katot geriliminden daha pozitif
olmak zorundadır.
Şekil 2.6: Doğru ve Ters Polarlamalar
Kondansatör: Elektrik enerjisini depolamaya yarayan devre elemanıdır. 2 iletken
levha arasına bir yalıtkan malzeme konularak yapılırlar. Elektrik yüklerini depolama
miktarına kondansatörün kapasitesi veya sığası denir. Kapasite C harfiyle gösterilir.
Birimi Farad'dır. Farad çok büyük kapasite birim olduğundan uygulamada
mikroFarad(µF) veya nanoFarad(nF) kullanılır. Kapasite levhaların büyüklüğüyle
doğru orantılı, levhalar arasındaki mesafenin karesiyle ters orantılıdır. Bu devredeki
kondansatörlerin kullanım amacı paraziti(harmonikleri) yok etmektir.
Resim 2.4: Çeşitli kondansatörler
10
3.SONUÇLAR Ve DEĞERLENDİRME
Gözlemlerim sonucunda elde ettiğim bazı sonuçlar; LDRler arttırılarak devre daha
kararlı(stabil) hale getirilebilir. Devreye led diyodu ilavesi yapılarak ldrleri dönüş
yönünü gösterilebilir. Kablo eklerinde ısıya duyarlı makaron kullanılarak kablo
dinamiği sağlanırabilir ve projeye esneklik kazandırılabilir.
Çalışmam boyunca breadbord’un iç yapısını ve nasıl kullanılacağını devre
elemanlarının kullanıldığı devreye göre farklı görevler alabildiğini ve devrenin
parçadan bütüne doğru tamamlanması gerektiğini öğrendim. Bu projenin en etkin
kullanım alanının uzaydaki uyduların enerji ihtiyaçlarını daha fazla karşılayabilmek ve
daha fazla ışığı absorblayabilmek için kullanıldığını öğrendim. Direnç renk kodlarını
okumayı ve avometre ile sağlamlık kontrolü yapmayı öğrendim. Bazı devre
elemanlarının sistem için zorunlu olmadığını ama sistemin daha düzgün ve kararlı
çalışmasına yardım ettiklerini öğrendim.
Resim 3.1: Güneş enerjisi ile çalışan bir uydu
11
Projeyi başka türlü yapabilseydim ışığın frekanslarına da duyarlı olmasını isterdim.
Uydularda kullanılmasındaki sebeplerden ötürü düşük enerjili ışıkları
absorblamaması için ve daha verimli olabilmesi için böyle bir eklenti yapmak isterdim.
4. REFERANS
www.320volt.com
http://www.robotiksistem.com/temel_elektronik.htm
Megep modülleri
Vedat Akaylar, Temel Elektronik ve Uygulamaları, Yazar Yayınevi, Bursa, 1999
www.silisyum.net
12