YILDIZ TEKNİK ÜNİVERSİTESİ
MAKİNE FAKÜLTESİ
MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
Işın Avcısı – Proje 2
Proje Raporu
Kaan Tellioğlu - 12067006
16.01.2013
İstanbul
1
İÇİNDEKİLER
1. ÖZET ...............................................................................................................................
2. PROJENİN TANIMI VE GERÇEKLEŞTİRİLMESİ
3. SONUÇLAR ve DEĞERLENDİRME .........................................................................
4. REFERANSLAR
2
1. ÖZET
Işın Avcısı olarak adlandırdığım projenin amacı ışığı devamlı olarak takip
eden bir sistem üretmektir. Sistemde bulunan alıcılar sayesinde, ışığın
konumu belirlenmekte ve eyleyici yardımıyla sistem ışık kaynağına
yönlendirilmektedir. Böylelikle ışık kaynağı takip edilmektedir. Sistemi
basitçe elektronik bir ayçiçeği olarak tanımlayabiliriz.
3
2.PROJENİN TANIMLANMASI VE GERÇEKLEŞTİRİLMESİ
A.PROJE MALZEMELERİ
100 uf kondansatör
1 adet
100nf kondansatör
1 adet
lm 358 op-amp
1 adet
15 k direnç
1 adet
10k potansiyometre
1 adet
22k direnç
1 adet
BC 337 npn transistör
2 adet
BC 327 pnp transistör
2 adet
1N4001 diyot
4 adet
LDR
9 volt güç kaynağı
DC motor
2 adet
4
B.DEVRE ŞEMASI
Devrenin Proteus Isis çizimi şekilde gibidir. Devre 9 voltluk kaynakla
beslenmektedir.
5
C.DEVREDEKİ PARÇALARIN KULLANIM AMAÇLARI
LM 358 : LM358 entegre op-amp ünitesidir. Op-amp ( operational amplifier)
işlevsel yükseltgeç olarak da adlandırılmaktadır. İçinde 2 op-amp
bulunduran lm 358, 8 bacaklıdır. Devremizde tek başına kullandığımız
entegre, pencere karşılaştırıcısı (comparator) görevi görmektedir. Ldr lerden
gelen değerler üzerinde karar vererek h köprüsüne komut göndermektedir.
100nf – 100uf kondansatörler : Bu kondansatörlerin amacı güç kaynağı
sebebiyle devrede oluşan elektriksel gürültüleri (noise) oluştukları anda
içlerinde tutup temiz elektrik çıkışı sağlamaktır.
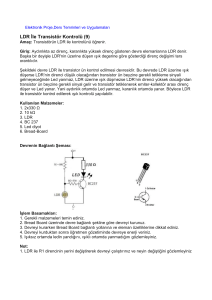
LDR: LDR (light dependent resistor) ışığa göre değişen dirençlerdir. Üzerine
gelen ışık miktarı arttıkça direnci azalmakta ve üstünden geçen akım
artmaktadır. Devremizde ldr ler ışığın geldiği noktayı bulmak amaçlı
kullanılmaktadır. 2 tane LDR kullanılmaktadır. Lm 358 entegresinin 2 ldr
den aldığı sinyale verdiği iki tepki sayesinde h köprüsüne sinyal
gönderilmektedir.
15K-10K-22K Dirençler: Bu dirençler devrede gerilim bölücü (divider) işlevi
görmektedir. 10k lık potansiyometre ve diğer iki direnç vasıtasıyla lm 358
entegresinin karar verebilmesini sağlayacak eşik değeri yani br referans
ayarlanmaktadır. Bu eşik değeri üzerindeki ve altındaki değerler, entegrenin
farklı tepkiler üretmesini düzenler ve h köprüsü aracılığıyla motor yön
kontrolüne olanak verir.
H köprüsü: Devremizde lm 358 entegresinden gelen ( +, -) komutlar yoluyla
motor yön kontrolü yapan yapıya h köprüsü ( h bridge ) denmektedir. H
köprüsü 2 adet BC337 transistör, 2 adet BC 327 transistör , 4 adet 1N4001
6
diyottan oluşmaktadır. doğrultusunda pnp ve npn transistörler vasıtasıyla
anahtarlama yapılarak motor yön kontrolü sağlanmaktadır.
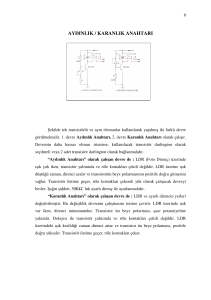
D. DEVREDE KARAR VERME MEKANİZMALARININ ÇALIŞMA MANTIĞI
LM358 ve LDR – Gerilim Bölücü Dirençler Arası İlişki : Gerilim bölücü
( divider) dediğimiz sistemi oluşturan dirençler, lm 358 teki iki op-amp ın
da IN1-2(-) veya IN1-2(+) bacaklarından birine bağlanarak entegre için
bir referans voltajı oluşturmaktadır. Bu referans voltajı, gerilim bölücü
dirençlerden biri olan 10K lık potansiyometre sayesinde hassasça
ayarlanabilmektedir. Bizim devremizde gerilim bölücü, birinci op-ampın
IN1(+) vede ikinci op-ampın IN2(-) girişlerine bağlanmış. LDR1 olarak
adlandırdığımız ilk ldr IN1(-) ye, LDR 2 ise IN2(+) ya bağlanmış durumda.
LDR den gelen voltaj, gerilim bölücülerle belirlenen referans değeriyle lm
358 entegresinde kıyaslanmaktadır. LDR den gelen voltaj, referans
değerin üstündeyse + voltaj ( lojik 1) çıktısı op-amp ın out1-2
bacaklarından alınmaktadır, eşik değerin altındaysa –voltaj ( lojik 0)
çıktısı out1-2 bacaklarından elde edilmektedir. Bu bilgiler h köprüsüne
gönderilmekte ve orda işlenerek motor yön kontrolü yapılmaktadır.
H Köprüsü Çalışma Mantığı
H köprüsü devremizde yön kontrolü yapmaktadır.
Devremizi sağ ve sol parçalar olarak ayrı ayrı düşünelim. İki parçada da
pnp ve npn transistörlerin BASE bacakları seri bağlı durumdadır.
COLLECTOR bacakları seri bağlanmıştır ve aralarında diyotlar
bulunmaktadır. EMİTTER bacakları da seri bağlanmış ve Collector
bacaklarına bağlantısı yapılmıştır. H köprümüzün şuanki bağlantı
7
durumu gereği BC 327 kodlu pnp transistörlerimiz – voltaj ( lojik 0) , BC
337 kodlu npn transistörlerimiz ise + voltaj ( lojik 1) komutu altında
iletkenlik kazanacaktır. Bunun nedeni transistörlerin çalışma
prensibidir. PNP transistörde voltaj EMİTTER’den COLLECTOR bacağa
doğru hareket etmektedir. NPN transistörlerdeyse voltaj COLLECTOR’e
doğrudur. Özetle H köprüsünde karşılılı köprülere entegreden gelen
bilgiler doğrultusunda köprünün iki parçasında da npn veya pnp
transistör aktif olmaktadır. Transistörlerin voltajı iletme yönlerine göre
motorda belli yönde dönmektedir. Devredeki diyotlar h köprüsü
parçalarında pasif durumdaki transistöre COLLECTOR bacağı üzerinden
voltaj gitmesini engellemek amacıyla kullanılmaktadır. Bir parçada iki
transistörün asla aynı anda aktif olamayacağına dikkat etmek
gerekmektedir. Karşılıklı köprülerin durumuna görede motorun yönü
ayarlanmaktadır. Bunu şu şekilde özetleye biliriz:
OUT tan
gelen
- Voltaj
+ Voltaj
(lojik 0) ise (lojik 1) ise
Sol
Sol
Sağ
Sağ
PNP
NPN
PNP
NPN
aktif
pasif
pasif
aktif
aktif
sinyal
Sol PNP
Aktif
Pasif
aktif
Sol NPN
Pasif
Aktif
pasif
Sağ PNP
Aktif
Pasif
pasif
aktif
pasif
aktif
Sağ NPN
Pasif
Aktif
aktif
pasif
aktif
pasif
Dönüş
sol
dönmez dönmez sağ
YÖNÜ
8
pasif
E. DEVRENİN ÇALIŞMA MANTIĞININ ÖZETİ
Devremizin çalışma mantığını özetlersek ; LDR lerden entegrenin op-amp
girişine gelen voltaj değeri, potansiyometre vasıtasıyla ayarladığımız referans
değeri ile kıyaslanır. Kıyaslama sonucu entegrenin out bacağından alınan
sinyaller h köprüsüne gönderilir. H köprüsünde yapılan anahtarlama
sonucu motorun yönü belirlenir. İki ldr de ışığı görene kadar motor
hareketini sürdürür ve iki ldr de ışığı gördüğü anda motor durur.
3.SONUÇLAR ve DEĞERLENDİRME
Projenin bana çok faydası oldu. Özellikle motor kontrol konusunda h
köprüsünü yerli yabancı internet sitelerinden detaylı şekilde incelemek,
araştırmak ve uygulayarak öğrenmek benim için çok önemliydi. Op-amp
ların işleyişi konusunda bilgi birikimim çok ilerledi. Gerilim bölme mantığı
ileride çok işimize yarayacağını düşündüğüm bir uygulama olduğundan
benim için çok faydalı oldu. Eğer bu projeyi ben kendim yapıyo olsaydım
diyotlarda ve transistörlerle h köprüsü yapacağıma l298- l293 gibi entegre h
köprülernden faydalanırdım. Devrenin voltaj değerini yükseltir, daha güçlü
parçaları kullanmak için zemin hazırlardım.
4.REFERANSLAR
http://robotus.net/wpcontent/uploads/2012/07/rokart-montaj-kilavuz.pdf
http://robot.ee.hacettepe.edu.tr/Dosyalar/makaleler/L2
98.pdf
http://www.picproje.org/index.php/topic,4757.30.html
http://modularcircuits.tantosonline.com/blog/articles/o
ld-h-bridge-secrets/part-1/
http://www.robotiksistem.com/dc_motor_kontrolu.html
http://forum.donanimhaber.com/m_21235671/tm.htm
http://www.devreyapimi.com/2011/12/19/h-bridge/
9
10