Güç Sistemleri Analizi
İçindekiler
1
GİRİŞ.................................................................................................................................................................................2
1.1
1.2
1.3
1.4
1.5
1.6
1.6.1
1.6.2
1.6.3
2
GÜÇ SİSTEMLERİ İÇİN GEREKLİ OLAN TEMEL ÇALIŞMALAR..................................................................4
NOTASYON.............................................................................................................................................................6
TEK FAZLI DEVREDE GÜÇ..................................................................................................................................7
ÜÇ FAZLI DENGELİ DEVRELERDE GÜÇ ..........................................................................................................9
PER-UNİT (BAĞIL) BÜYÜKLÜKLER..................................................................................................................9
SİMETRİLİ BİLEŞENLER....................................................................................................................................10
a işlemcisi...........................................................................................................................................................11
Simetrili bileşenlerin empedanslara etkisi .........................................................................................................12
Simetrili bileşenlerde güç...................................................................................................................................12
SİSTEM MODELLEMESİ ...........................................................................................................................................13
2.1
HATLAR ................................................................................................................................................................13
2.1.1
Direnç.................................................................................................................................................................14
2.1.1.1
2.1.1.2
2.1.2
Endüktans...........................................................................................................................................................17
2.1.2.1
2.1.2.2
2.1.2.3
2.1.2.4
2.1.2.5
2.1.2.6
2.1.3
Direncin sıcaklıkla değişimi .......................................................................................................................................15
Deri etkisi ...................................................................................................................................................................15
İletkenin içindeki akı dağılımı....................................................................................................................................19
Tek fazlı iki damarlı hatların endüktansı ....................................................................................................................20
Bir gurup içindeki iletkenin durumu...........................................................................................................................22
Çok telli tek fazlı iletkenler ........................................................................................................................................23
Üç fazlı hatların endüktansı........................................................................................................................................25
Toprağın etkisi............................................................................................................................................................27
Kapasitans..........................................................................................................................................................28
2.1.3.1
2.1.3.2
2.1.3.3
2.1.3.4
Bir iletkenin çevresindeki elektrik alanı .....................................................................................................................29
İki iletkenli hatların kapasitansı..................................................................................................................................30
Üç fazlı hatların kapasitansı .......................................................................................................................................32
Toprağın etkisi............................................................................................................................................................34
2.2
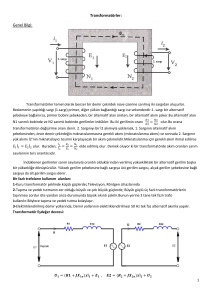
TRANSFORMATÖRLER......................................................................................................................................36
2.2.1
İdeal Transformatör ...........................................................................................................................................37
2.2.2
Transformatörün Eşdeğer Devreleri ..................................................................................................................38
2.2.3
Özel Transformatörler........................................................................................................................................41
2.2.3.1
2.2.3.2
2.2.3.3
2.2.3.4
2.2.3.5
2.2.3.6
Üç fazlı transformatörler ............................................................................................................................................41
Üç sargılı transformatörler .........................................................................................................................................44
Oto-transformatörler...................................................................................................................................................45
Kademeli transformatörler..........................................................................................................................................46
Faz kaydırıcılar...........................................................................................................................................................48
Topraklama transformatörleri.....................................................................................................................................50
2.3
ÜRETEÇLER .........................................................................................................................................................51
2.3.1
Senkron Makinelerin Yapısı ...............................................................................................................................52
2.3.2
Senkron makine parametreleri ...........................................................................................................................53
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
1
1
Giriş
Elektrik güç sistemleri değişen ve gelişen mevcut müşteri ihtiyaçlarını hızlı, temiz, ekonomik bir şekilde
karşılarken, enerji pazarına giren alternatif şebekelerle gerçekçi, ucuz, çevresel duyarlılıklara cevap
verebilecek çözümler üreterek rekabet etmek zorundadır. Alternatif enerji şebekelerinin zorlamalarına
rağmen halen enerji ihtiyacının büyük bir bölümü elektrik güç şebekeleri yoluyla sağlanmaktadır.
Geçen yüzyılın sonunda doğru akımla çalışan ark lambalarının kullanımı ile başlayan elektrik enerjisinin
ticari kullanımı 1888 de Nicolai Tesla’nın asenkron motor patentini almasıyla farklı bir yöne doğru
evrilmeye başlamıştır. Buna paralel olarak elektriki güç sistemlerinin yapısı da değişmeye başlamıştır.
Genellikle ark lambalarını çalıştırmak için 100V civarında olan doğru akım (DA) uzun mesafelere
iletimi sağlamak amacıyla önce 1300V’a (1882, Münih fuarı) daha sonra 3000V a (1883, GrenobleVizille hattı) çıkarılmıştır [1]. O zaman ki inanış 100V DA ın herhangi bir kazaya yol açmaksızın
dokunulabileceği yolunda idi. Buna rağmen ilk dağıtım şebekesi 1886 da 500V AA olarak
gerçekleştirilmişti. Bu şebekede müşteriler 16 küçük transformatör yardımıyla 100V AA ile
beslenmekteydi. 1889 da AA ve DA arasında bir savaş başladı Westinghouse AA Edison ise DA
taraftarı idiler. Edison köpek ve atlar üzerinde yaptığı deneylere dayanarak AA ın çok daha büyük
tehlikeler barındırdığı iddiasında bulunuyordu. Buna karşı ise Westinghouse AA ın herhangi bir fazla
tehlike arz etmediği iddiasıyla Edison’a düello teklifinde bulunuyordu. Bu teklife göre her iki tarafta biri
AA diğeri DA olmak üzere eşit gerilimlere maruz kalacaklar gerilimin seviyesi eşit şekilde 100, 150,
200V şeklinde arttırılacaktı. Düello gerçekleşmedi fakat 1890 da Kremler elektrikli sandalyede idam
edildi tabii ki AA ile!… Bu yüzyılın başında AA ın DA a nazaran daha tehlikeli olduğu bilinmekle
beraber. Dağıtım şebekeleri AA olarak ve topraklanmayarak gerçekleştirilmeye başlandı. Ancak dağıtım
şebekeleri karmaşıklaştıkça farklı müşterilerin farklı fazlarında oluşabilecek kısa devre arızaları yangın
ve temas tehlikesine her zaman maruz kalınabileceği gerçeğini gündeme getirmişti. Bu tehlikeler
sebebiyle alçak gerilim şebekeleri topraklanmaya başladı. Mesela İngiltere’de 1912 den beri tüm
şebekelerin her hangi bir şekilde topraklanması zorunludur [2]. Alçak gerilim şebekeleri topraklama
sistemleri IEC tarafından standardize edilmiştir [3], nötür noktası ile ilgili pratikler ülkeler arasında
farklılıklar göstermekle birlikte Türkiye’de direk topraklı şebekeler kullanılmaktadır [4].
1893 te 2300V luk ilk üç fazlı iletim hattı Güney Kaliforniya’da faaliyete geçti. Gittikçe artan
miktardaki enerjinin daha uzun mesafelere iletilmesi yolunda ortaya çıkan ihtiyaç iletim geriliminin
seviyesini yükseltmeye başlamıştı. 1922 de 165kV, 1923 de 220kV, 1935 de 330kV luk hatlar inşaa
edildi. 1965 te Hydro Qubec 735kV ve 1966 da da 765kV luk hatları ABD’de kullanıma soktu [5].
İletimde kullanılan gerilim değerleri daha sonra hem pratik sebeplerle hem de birliği sağlamak amacıyla
endüstri tarafından standartlaştırılmıştır.
Ülkemizde de ilk defa 15.09.1902 tarihinde Tarsus kasabasında bir su değirmeni milinden transmisyonla
çevrilen 2kVA lık bir genaratörden kasabaya elektrik verilmiştir. İlk kez geniş kitlelerin elektriğe
kavuşturulması 1913 yılında Silahtarağa santralının işletmeye açılması ile sağlanmıştır. Daha sonra
Ankara ve İzmir’den başlamak üzere diğer büyük şehirlerinde dağıtım şebekeleri gerçekleştirilmiştir. İlk
15kV luk iletim hattı 1927 de Yedikule-Silahtarağa arasında kurulmuştur. Daha sonraları 1929 da 26kV
luk Trabzon, 1940 da ise 33kV luk İvriz-Ereğli nakil hatları işlemeye alınmıştır [6]. Enterkonnekte
şebebekenin tesisi yolundaki çalışmalar ise ikinci dünya savaşı öncesi yıllarda başlamıştır.
1950 lerde cıvalı ark lambaları ile gerçekleştirilen redröserlerin kullanıma geçmesi ile yüksek gerilim
DA bağlantıları (HVDC) büyük güçlerin çok uzak mesafelere iletilmesi yolunda AA ya göre daha
ekonomik olmaya başladı. İlk ticari HVDC iletim hattı 1954 yılında İsviçre ile aynı ülkenin Gotland
adası arasında 96km lik denizaltı geçişi ile sağlandı. Tristorlerin yaygınlaşması ile HVDC bağlantıları
daha da cazip hale gelmiştir [7].
Tarihsel gelişimin de işaret ettiği gibi elektrik güç sistemleri hem büyümüş hem de yapısal olarak radikal
değişimler sergilemiştir. Coğrafî olarak da güç sistemlerinin evrimleşmesi farklı yönlerde tezahür
etmiştir. Mesela gerilim seviyelerinin standartlaşması, güç frekansının seçilmesi, nötür noktası bağlantı
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
2
şekilleri temelde Amerika ve Avrupa arasında ve hatta aynı ülke içerisindeki değişik şirketler arasında
farklı yönlerde gelişmiştir. Fakat bu değişim ve farklılaşmalara rağmen güç sistemlerinin temel
özellikleri aynıdır. Elektrik güç sistemleri:
•
Üç fazlı olarak ve belirli limitler dahilinde sabit gerilim ve frekansta işletilirler.
•
Orta gerilim tesislerinde nötür noktası topraklama pratikleri farklı olmakla beraber son kullanıcıya
alçak gerilim topraklanmış olarak ulaştırılır.
•
Sanayi yükleri genellikle üç fazlıdır.
•
Evlerde tek fazlı tüketim olmakla beraber bu yükler fazlara dengeli bir şekilde dağıtılırlar
dolayısıyla sistem elektriki olarak dengelidir.
•
Temel elektrik üretim kaynakları senkron makinelerdiri.
•
Türbinler esas enerjiyi (fosil, nükleer, hidrolik veya yenilenebilir) mekanik enerjiye bunlara bağlı
senkron makinelerde bu enerjiyi elektrik enerjisine dönüştürürler.
•
Güç uzak mesafelere ve coğrafi olarak dağılmış müşterilere taşınır. Taşıma işlemi dolayısıyla alt
sistemler ve değişik gerilim seviyelerine ihtiyaç duyar.
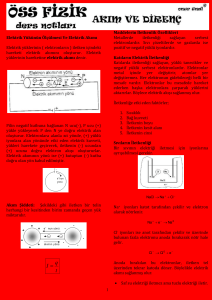
*Şekil * SEQ Şekil \* ARABIC *1* de modern bir güç sisteminin temel elemanları görülmektedir.
Üretim merkezlerinde üretilen elektrik enerjisi hatlar, transformatörler, kesiciler vs. cihazlardan oluşan
karmaşık bir ağ üzerinden müşterilere ulaştırılmaktadır.
*Şekil * SEQ Şekil \* ARABIC *1* Bir güç sisteminin temel elemanları
Dolayısıyla bir iletim hattını alt sistemlere ayırarak incelemek ortak bir anlayış olarak yerleşmiştir;
i
Özellikle rüzgar turbinlerinde asenkron makinalar kulanılmakla birlikte bunların güç sistemlerindeki
ağırlığı çok küçük düzeylerde kalmaktadır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
3
1. iletim sistemi,
2. alt-iletim sistemi,
3. dağıtım sistemi.
Bir iletim sistemi, bütün ana üretim merkezlerini birbirine enterkonnekte olarak bağlayan hatlardan
meydana gelir. Bu hatlar bütün sistemin belkemiğini oluştururlar ve genellikle mümkün azami gerilimle
işletilirler bu gerilim genellikle 230kV un üstündedir. Üreteçlerin gerilimi genellikle 11 ile 35kV
arasında değişmektedir dolayısıyla bunlar yükseltici transformatörlerle iletim gerilimi seviyesine
yükseltilmekte ve iletim hatları ile iletim merkezlerine sevk edilmektedir. Bu merkezlerde gerilim altiletim ve dağıtım sistemi gerilim seviyesine düşürülmektedir ve ilgili hatlarla alt-iletim veya dağıtım
merkezlerine ulaştırılmaktadır.
Bir alt-iletim sistemi, gücü daha küçük büyüklüklerle dağıtım merkezlerine aktarırlar. Büyük endüstriyel
müşteriler genellikle bu merkezlerden beslenirler. Bir çok güç sisteminde iletim ve alt-iletim sistemleri
kesin hatlarla birbirinden ayrılmamıştır. Genellikle iletim gerilim seviyesinde yaşanan artışlar
neticesinde eski iletim hatları alt-iletim sistemleri olarak kullanılmaya başlamıştır.
Bir dağıtım sistemi, güç sistemlerinin enerjiyi son kullanıcıya ulaştıran son basamağıdır. Dağıtım hatları
birincil ve ikincil dağıtım sistemleri olmak üzere sınıflandırılmaktadır. Birincil dağıtım sistemleri 4 ile
35kV arasında gerilim seviyesine sahiptir. Genellikle küçük endüstriyel müşteriler bu tip besleme hatları
üzerinde enerjilendirilirler. İkincil dağıtım sistemleri ise ev ve işyerlerini ülkemizde 220\380Vi
seviyesinde beslerler. Bu gerilim seviyesi ülkeler arasında farklılıklar göstermektedir.
Yük merkezlerine yakın küçük üretim istasyonları genellikle alt-iletim ve dağıtım sistemlerine
bağlanırlar. Komşu sistemlerle olan bağlantılar iletim sistemi gerilimi seviyesinde gerçekleştirilmesi
genel uygulamadır.
Özetle bir güç sistemi bir çok paralel üretim merkezi ve çeşitli tabakalarda düzenlenmiş hatlardan
meydana gelir. Sistemin bir ağ yapısı arz etmesi beklenmedik durumlara karşı toplam mukavemeti
arttırıcı yönde etki yapar. Böylece müşterilere kesintisiz bir hizmet sağlanmış olur.
1.1 Güç sistemleri için gerekli olan temel çalışmalar
Bir güç sisteminin sağlıklı, kesintisiz, temiz olarak kurulması ve işletilmesi için bir seri çalışmanın
yapılması gereklidir. Bu çalışmalar planlama sırasında yapılması gerektiği gibi işletim esnasında da
sistemin değişen durumlara karşı olan direncini anlamak için gerçekleştirilmelidir. Bu çalışmalar şu
şekilde sıralanabilir.
1. Yük Akışı (Load Flow): Normal şartlar altında güç sistemleri sabit durumda (steady state)
çalışırlar. Yük akış hesaplamaları çalışma şartlarının belirlenmesi ve sistemin durumunun
anlaşılması için gerçekleştirilir. Sistemin olası uzun dönemli değişikliklere mukavim olup
olmadığı öngörülen yük artışlarına göre yapılacak yeni yük akışı hesaplamalarıyla belirlenir
ve bu sonuçlara göre geleceğe matuf stratejiler tespit edilir. Yük akış hesapları olası
problemli, meselâ hat kaybı gibi durumlar (system outages) için alternatif yollar bulmak için
de kullanılmaktadır.
2. Arızalı durum (Fault Studies): Herhangi bir arıza durumunda, ki bunlar genellikle kısadevre
çeşitleridir, sistemin bu arızaya göstereceği tepkinin (response) ne olacağı sorusuna cevap
bulmak için bu hesaplamaların yapılması gerekmektedir. Arıza esnasında oluşabilecek ısıl
(thermal), magnetik, elektriksel ve hatta mekanik gerilimlere (stress) sistemin tamamının
veya unsurlarının dayanımının belirlenebilmesi bu hesaplamaların temel saikidir. Bu
hesaplamaların sonucuna göre devre koruma elemanlarının seçimi, ayarı, düzenlenmesi
gerçekleştirilir.
i
220V faz toprak, 380V ise fazlar arası gerilimdir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
4
3. Koruma (Protection): Güç sistemlerinin iki temel probleme karşı korunması gerekmektedir.
Bunlar aşırı gerilimler ve akımlardır. Devre koruma elemanları bu arızalara karşı sistem
elemanlarını korumak ve arızalı kısmı hızlı bir biçimde sistemden ayırmak veya arıza
sebebini ortadan kaldırmak için geliştirilmişlerdir. Bu elemanların sistemi en az etkileyecek
ve tasarruflu bir tarzda yerleştirilmesi ve ayarlanması bu çalışmalarla gerçekleştirilir.
4. Topraklama (Earthing): Bir topraklama şebekesi sistemde herhangi bir elektriksel ve ısıl stres
meydana getirmeden arıza akımına yol sağlamalıdır. Bu esnada toprak şebekesi çevresinde
oluşabilecek tehlikeli adım ve dokunma gerilimleri de belirlenmiş sınırların üstüne
çıkmamalıdır. Topraklama şebekesinin düzenlenmesi ve performansı yapılacak hesaplamalar
veya ölçmelerle belirlenir.
5. Kararlılık (Stability): Yük açısı ve gerilim kararlığı olarak iki ayrı kararlılık çalışması güç
sisteminin sağlıklı bir şekilde idame ettirilmesi için gereklidir. Bunun için sistemin kararlılık
sınırları her bir durum için belirlenmeli ve sistemin optimum noktada çalışması
sağlanmalıdır. Pazar ekonomisinin oluşturduğu rekabetçi koşulların maliyeti optimize etme
yolunda oluşturduğu baskılar ve çevreci gurupların yeni sistem inşasına karşı aktif direnişleri
mevcut sistemlerin kararlılık sınırlarında işlemesini gündeme getirmiştir. Bu nedenle
kararlılık çalışmaları, hem geçici durum kararlığı (transient stability) hem de sabit durum
kararlılığı (steady state stabilty), güç sistemlerinin sağlıklı için uygun stratejiler geliştirilmesi
yolunda gittikçe artan bir öneme sahiptir.
6. Geçici rejimler (Transients): Bir güç sisteminde oluşan arızaların büyük bir çoğunluğu geçici
karakterdedir. Dolayısıyla sabit hal için geliştirilmiş yaklaşımlar ve çözüm metotları bu
durumlarda yetersiz kalmaktadır. Özellikle kararlılık analizleri için yeni kriterler ve
hesaplama teknikleri incelenecektir.
7. Aşırı gerilimler (Over-voltages): Bir güç sisteminde gerek tabiat olayları sebebiyle (yıldırım
düşmesi) gerekse çeşitli operasyonlar (açma-kapama) neticesinde aşırı gerilimler meydana
gelebilmektedir. Bu gerilimlerin kestirilmesi ve bunlara karşı geliştirilecek stratejilerin tespiti
için gerekli olan çalışmalardır.
8. İzolasyon koordinasyon (Insulation coordination): Bir güç sistemi için önemli problemlerden
biride bir bütün olarak sistemin ve tek tek unsurlarının (transformatör, hatlar, yeraltı kabloları
vs) sistemdeki daimi veya geçici gerilimler sebebiyle oluşabilecek strese dayanıp
dayanamayacağının tespiti ve bu dayanımın ucuz, emniyetli ve sağlıklı bir yöntemle
teminidir. Bu işlevin sağlanması izolâsyon koordinasyon çalışmaları ile yapılır.
9. Ekonomik yük dağılımı (Economic dispatch): Bu çalışmalar üretilen enerjinin tüketim
merkezlerine en ekonomik yollardan iletilmesi, enerjinin ucuz üretim merkezlerinden temini
şeklinde özetlenebilir. Özelleştirmenin getirdiği pazar ekeonomisinin sonucu olan rekabetçi
ortam bu tip çalışmaları daha da önemli kılmıştır.
10. Güç Kalitesi (Power Quality): Tüketiciye ulaşan gücün kesintisiz, öngörülmüş belirli limitler
dahilinde sabit frekans ve gerilim genliğinde, hormoniklerden arındırılmış düzgün bir sinüs
dalgası şekline sahip olarak iletilmesi gerekmektedir. Müşteriler satın aldıkları gücün bu
sayılan vasıflara sahip olmasının getireceği avantajların bilincindedir. Bu konuda yapılması
gereken çalışmalar yukarda sayılanlara ilave olarak özellikle hormoniklerin bastırılmasında
odaklanmaktadır. Harmonik kaynaklı bozulmalara karşı geliştirilecek stratejiler bu
çalışmaların temelini oluşturmaktadır.
11. Elektromagnetik uyumluluk, EMU (Electromagnetic Compabilty, EMC): Herhangi bir
elektrikli cihaz bir başkasını ve çevresinde olabilecek canlıları gerek yayınım (radiation)
gerekse iletim yoluyla önceden belirlenmiş belirli limitler dahilinde etkilemeyecek şekilde
çalışmalıdır. Güç sisteminin ve onu oluşturan unsurların bu ilkeye uygun olarak
düzenlenmesi ve uygunluğu değişen ve dinamik sistem koşulları altında sürekli kontrol
altında tutulması gerekmektedir. EMU çalışmaları bu doğrultuda yapılacak çalışmalarıdır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
5
12. Yük tahmini (Load Forecasting): Düzgün ve gerçekçi bir planlama yapabilmek ve sistemi
artan talebe cevap verebilecek şekilde geliştirebilmek için güç sistemlerinde oluşabilecek
talebin önceden kestirilebilmesi için yapılan çalışmaların bütünüdür. Gerçekçi bir kestirim
yapabilmek için çeşitli klasik yöntemler kullanılabildiği gibi yapay zeka teknikleri de bu
amaçla kullanılabilmektedir.
Bütün bunlara ilave olarak güç sistemleri teknolojisinde son yıllarda yeni teknik mesela yüksek gerilimli
doğru akım bağlantıları (HVDC) veya cihazlar, mesela seri kompanzasyon, statik anahtarlamalı
kompansatörler, faz kaydırıcı transformatörler, hızlı geri kapama gibi (kısaca FACTS cihazları), gittikçe
artan bir sıklıkla kullanılmaya başlamıştır. Bu yeni cihaz ve teknikler mevcut sistemin performansını
etkilemekte ve yeni çalışmalara yol açmaktadır. Özellikle FACTS cihazları güç sisteminde yeni ufuklar
açmakta ve bunların sistem içine katılmasının yol açtığı sorunlar yeni çalışma alanları yaratmaktadır
mesela senkron altı salınım problemleri (sub-synchronous resonance).
Bu problemlerin klasik ve deterministik çözüm metotları üzerinde durulacaktır. Bununla beraber güç
sistemleri problemleri modern teknikler ve yaklaşımlara açıktır. Geleneksel sorunlar için alternatif
çözüm yolları gerek yapay zeka çalışmaları ile gerekse ihtimal hesaplarına dayalı olarak
yapılabilmektedir.
1.2 Notasyon
Bu kısımda kullanılacak olan notasyon ile ilgili bilgiler örneklerle desteklenerek verilecektir. Bu notların
hazırlanmasında bir çok kaynaktan yararlanılmış olmakla beraber temelde Stevenson’un [8] tekniği takip
edilmiştir. Farklı kaynaklara dayanan çalışmalar referanslandırılmıştır.
Herhangi bir barada ölçülebilecek olan akim ve gerilim aksi belirtilmediği müddetçe tam bir sinüs
dalgası seklinde ve sabit frekansta kabul edilecek ve bu değerlere ait fazör gösterim büyük harflerle
yapılacaktır U, I. Bu işaretlerin çevresinde yer alacak olan düşey çizgiler bu fazörlerin genliklerine işaret
etmek için kullanılacaktır, |U|, |I|. Küçük harfler bu büyüklüklerin ani değerlerini göstermek için
kullanılacaktır i, u. İleri bölümlerde izah edilecek olduğu üzere per-unit büyüklükler de küçük harfler
kullanılarak gösterilecektir. Üreteçlerin iç gerilimi için E sembolü kullanılacaktır. Bu semboller
kullanılan alt yazımlarla (subscript) desteklenmişlerdir. Büyük harflerle yapılan gösterim aksi
belirtilmediği müddetçe etkin (rms) değerleri gösterecektir. Tam bir sinüs dalgası için azami değerin
a
R
X
Iy b
ZG
Ut
Zy
Uy
E
0
n
1.414 bölünmesi bu değeri verecektir. Aşağıdaki şekilde bu kullanımlar gösterilmiştir.
Şekil 2 Dört uçluya ait gösterim.
Şekilde ZG genaratörün iç direncini Ut, Uy sırasıyla terminal ve yük uçlarındaki gerilimleri temsil
etmektedir. Bu gerilimler tek veya çift alt yazım kullanılarak gösterilebilirler. Burada kullanılacak
notosyonda yukarıdaki devreye ait gerilimler,
Ut=Ua0=Ua
Uy=Ubn=Ub
olarak gösterilebilir. Hat boyunca hat empedansı ZH sebebi ile görülebilecek olan gerilim düşümü ise,
∆U=Uab=IabZH
İşaretin değiştirilmesi akım veya gerilim değerinin 180° döndürülmüş şeklini üretecektir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
6
Uab/180°=Uba=- Uab
Kirchhoff’un gerilim kanunlarının yukarıdaki devreye uygulanması ile
U0a+Uab+ Ubn=0
Sonucu elde edilecektir. Yukarıdaki devrede 0 ve n noktaları aynıdır. Bu dikkate alınarak bağıntı
yeniden düzenlenecek olursa,
-Ua0+Uab+ Ub0=0
Üç fazlı sistemler içinde benzer bir terminoloji ve notosyan kullanılacaktır.
1.3 Tek Fazlı Devrede Güç
Elektriksel gücün birim Watt olup bir yük tarafından emilen güce tekabül eder. Doğru akım devrelerinde
bu gücün hesaplanması doğrudan yapılabilir fakat AA devrelerinde durum biraz farklıdır. Şayet gerilim
ve akım aşağıda gösterildiği gibi zamana bağli bir fonksiyon olarak ifade edilecek olursa,
u=UMcos(wt)
i=IMcos(wt-θ)
Bu bağıntılarda M alt yazımı azami değerlere işaret etmektedir, θ ise akım ile gerilim arasındaki faz
farkını göstermektedir. Şayet yük resistif bir karakterde ise θ açısının değeri sıfır olacaktır. İndüktif ve
kapasitif karakterdeki yükler için bu açının değeri sırası ile pozitif ve negatif olacaktır. Ani değerleri
verilen akim ve gerilimin ait olduğu tek fazlı sisteme ait güç bağıntısı, gücün ani değeri;
p=ui=UMIMcos(wt)cos(wt-θ)
.1
Şeklinde yazılabilir. Bu devreye ait akım, gerilim ve gücün ani değerleri Şekil 3 de gösterilmiştir.
60
40
20
0
0.01
0.02
0.03
0.04
0.05
20
Akim
Gerilim
Güç
Şekil 3 Akım, gerilim ve gücün ani değerleri.
Burada akım ile gerilim arasında θ derece faz farkı bulunduğu için güç zamana bağlı olarak negatif
olabilmektedir. Bu faz farkı olmasa idi gücün negatif olması söz konusu olmayacaktı. Gücün negatif
olmasının manası yükten kaynağa doğru bir akımın olmasıdır. Yükün kaynağa doğru bir akıma yol
açabilmesi için kapasitif ve enduktif elemanlar da içermesi gerekmektediri. Tam endüktif ve kapasitif
i
Bunu denemek için yukarda verilen aci degeri ile oynayabilirsiniz. Bu işlem için MATHCAD dosyası
“güç açısı”nı kullanınız. Açinin sıfır oldugu durumlara ve -90 ile 90 derecelere dikkat ediniz
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
7
devrelerde güç eğrisinin pozitif ve negatif kısımlarının birbirine eşit ve ters yönde olması sebebiyle
bunların ortalaması sıfır olacaktır.
Yukarıdaki güç ifadesi trigonometrik bağıntılar kullanılarak ve azami değerler yerine etkin değerler
yerleştirilerek,
p=UI cosθ (1+cos2wt)+UI sinθ sin2wt
.2
şeklinde yazılabilir. Yukarıdaki ifade incelenecek olursa cos ifadesi ani gücün aktif bileşeni, sin ifadesi
ise ani gücün reaktif bileşeni olarak isimlendirilir. Zamana bağlı terimler düşürülerek söz konusu
büyüklüklerin genlikleri yazılacak olursa
P=UI cosθ
Q=UI sinθ
.3
sonucuna ulaşılabilir. Bu terimler aktif ve reaktif güçler olarak, θ açısının cos değeri de güç faktörü
olarak isimlendirilmektedir. Tabiatıyla P ve Q büyüklükleri aynı boyutlara sahiptir. Fakat pratik
nedenlerle P Watt, Q ise VAr birimiyle anılmaktadır. Bu iki büyüklüğün geometrik toplamı ise görünür
gücü, S, verecektir. Bu gücün birimi ise VA olarak belirlenmiştir. Güç sistemleri uygulamalarında bu
büyüklükler genellikle kilo veya Mega seviyesinde kullanılırlar.
Yukarıdaki akım ve gerilim büyüklükleri fazör olarak gösterildikleri takdirde güçler karmaşık
(kompleks) ifadeler kullanılarak kolayca hesaplanabilir. Şayet herhangi yükün çektiği akım I/α , gerilim
U/β olarak gösterilecek olursa karmaşık güç (S), gerilim ile akımın eşleniğinin çarpımı ile bulunabilir.
S=UI* = U/β I/-α
.4
Yukarıdaki denklemlerde (. 1, . 2 ve . 3) gösterilen θ açısı, rasgele seçilen bir referans göre ölçülen akım
(α) ve gerilim (β) açılarının farkına eşittir.
Aydınlatma ve elektrikli ev aletleri genelde tek fazlı olmakla beraber, çoğunlukla güç sistemleri üç fazlı
ve dengeli bir yapı arz ederler. Üç fazlı dengeli devrelerde gerilim kaynaklarının genlikleri birbirlerine
eşit ve 120° faz farkına sahiptirler. Şayet birinci faz gerilimi referans alınacak olursa bir üretecin iç
Ec
Ea
Eb
gerilimlerinin bu referansa göre olan durumları Şekil 4 de gösterilmiştir.
Şekil 4 Faz gerilimlerinin durumu.
Bu gerilimlerin fazör ifadesi de benzer şekilde Ea/0 , Eb/240 ve Ec/120 olarak yazılmaktadır. Dengeli
sistemlerde bu üç gerilimin toplamı sıfırdır. Akımlar da benzer şekilde 120° faz farkına sahiptirler.
Burada fazların isimlendirilmesinde a, b ve c sırası kullanılacaktır. Yazında farklı kullanımlarda söz
konusudur mesela genellikle İngiltere’de R (red), G (green) ve Y (yellow) kullanılmaktadır. Sadece 1,2
ve 3 şeklinde bir kullanımda söz konusudur. Nötür noktası için de n sembolü kullanılacaktır.
1.4 Üç fazlı dengeli devrelerde güç
Üç fazlı bir genaratör tarafından verilen gücün toplam miktarı kolaylıkla her üç fazın gücünü toplayarak
veya bir fazınkini üçle çarparak bulunabilir. Şayet dengeli yıldız bağlı bir genaratörde faz gerilimi Uf, ve
faz akımı If ise toplam güç,
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
8
Uf=Uan=Ubn=Ucn
ve
If= Ian=Ibn=Icn
ise
P=3UfIfcosφ
.5
şeklinde yazılabilir. Burada φ akım ile gerilim arasındaki açıdır. İfade faz büyüklükleri yerine hat
büyüklükleri ile yazılmak istenirse, yıldız bağlı bir sistemde hat akımı faz akımına eşit fakat hat gerilimi
faz geriliminin √3 katıdır.
If=Ih Uh=Uf√3
ise
P=√3UhIhcosφ
.6
olur. Şayet sistem üçgen bağlı ise hat ve faz gerilimleri birbirine eşit fakat hat akımı faz akımının katıdır.
If=Ih√3
Uh=Uf
ise
P=√3UhIhcosφ
.7
Denklem . 6 ve . 7 de verilen nihai ifadeler arasında herhangi bir fark yoktur dolayısıyla hat büyüklükleri
kullanıldığı takdirde sistemin yıldız veya üçgen bağlı olması güç ifadesini değiştirmemektedir.
1.5
Per-Unit (Bağıl) Büyüklükler
Enerji iletim hatlarında akım, gerilim güç gibi temel büyüklükler genellikle kA, kV, kW veya MW gibi
birimlerle incelenir. Fakat pratikte bu değerlerin baz alınan büyüklüklere bağlı olarak ifadesi farklı
gerilim seviyelerine sahip bölgelerden oluşan sistemlerin incelenmesinde büyük kolaylıklar
sağlamaktadır. Bu işleme per-unitisation denmektedir. Baz alınan büyüklükler için çok çeşitli ihtimaller
varsa da genelde faz gerilimi (Uf) ve bir fazın Volt-Amper (S1Φ) değerleri baz alınarak geriye kalan tüm
değerler bu iki baza bağlı olarak sınıflandırılmaktadır.
Mesela 220kV baz gerilim olarak seçildiği takdirde 231, 209, 198kV lar sırasıyla 1.05, 0.95, 0.9pu
değerlerini alacaktır. Her bir boyut için geçerli olan baz değerleri şu şekilde belirlenebilir.
PB= S1Φ
QB= S1Φ
IB= S1Φ/ Uf
ZB= Uf / IB
ZB= Uf 2/ S1Φ
.8
Burada B alt yazımı baz değerlere işaret etmektedir. Her bir devre elemanının bağıl değerleri gerçek
değerin verili baz değere oranlanması ile hesaplanabilir.
Upu= U/UB
Ipu= I/IB
Zpu= Z/ZB
.9
Burada pu alt yazımı bağıl değerleri temsil etmek için kullanılmaktadır. Daha ilerdeki bölümlerde bu
şekilde gösterim yerine küçük harfle gösterim kullanılacaktır.
Genellikle üç fazlı dengeli sistemler tek faz gösterimle modellenmekte ve tek faz için çözülmektedir. Bu
durum de hat gerilimi olarak verilen baz gerilimler ve toplam güç olarak verilen baz gücünün
kullanılması bazı yanlış anlaşılmalara sebep olabilmektedir. Fakat sistem dengeli olduğu için verilen baz
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
9
büyüklükleri hem hat hem de faz büyüklüklerinin hesaplanmasında kullanılabilmekte bağıl büyüklükler
neticede bir oran olduğundan bu kullanım nümerik bir hataya sebep olmamaktadır. Derste çözülecek
olan sayısal bir örnek bu durumu daha iyi açıklayacaktır.
Genellikle üreticiler makinaların (transformatörler, senkron veya asenkron makinalar vbg.) katalog
değerlerini üretildikleri büyüklükleri baz alarak ifade etmektedirler bu işleme normalisazyon
denmektedir. Bu baz değerler genellikle sistem için baz alınan değerlerden farklıdırlar. Dolayısıyla
verilen bu normalize edilmiş değerleri sistem için kullanılışlı hale getirmek için bir takım dönüştürme
işlemleri yapmak gerekmektedir. Bu işlem aşağıda verilen denklik kullanılarak kolayca yapılabilir.
Zpuyeni= Zpuverili(UBverili/UByeni)2(SByeni/SBverili)
. 10
Bu denklem normalize edilmiş değerleri per-unit değerlere dönüştürmekte kullanılabildiği gibi, herhangi
bir bazda verilen bağıl değeri bir başka baza çevirmekte kullanılabilmektedir.
1.6 Simetrili Bileşenler
Elektrik güç sistemleri genellikle dengeli, üç fazlı ve sinüs biçimli değişen bir genliğe sahip gerilim
altında çalışmakta oldukları kabul edilerek incelenirleri. Ancak sağlıklı bir işleme için dengeli olmayan
çalışma şartlarının da göz önüne alınması gerekebilmektedir. Bu duruma en tipik örnek simetrik
olmayan arızalardır, mesela tek faz toprak, iki faz veya iki faz toprak kısa devreleri. Dengesiz
durumların analizi konvansiyonel teknikler kullanılarak yapılabilir. Fakat bu tarz analizlerin zaman alıcı
ve sayısal bakımdan ele alınmasının zor oluşu gerçeği hata ihtimalini arttırıcı yönde etki yapmaktadır.
Bu durum bazı basitleştirmeler veya dönüşümler kullanılması ihtiyacını getirmiştir ve dönüşüm
teknikleri için teşvikçi olmuştur.
Üç fazlı elektriki sistemlerin dengeli olmayan işleme şartlarını inceleyebilmek için ilk defa Fortescue [9]
tarafından 1918 de genişçe tartışılmış bir metot olan simetrili bileşenler dönüşümü, o günden bu yana
güç sistemleri problemlerinin çözümü için faydalı bir araç ve hatta bir standart olarak kullanılmaktadır.
Dönüşüm N fazdan oluşan dengesiz bir sistemin N tane dengeli sisteme dönüştürülerek çözülmesi
esasına dayanmaktadır. Fortescue’nun adıyla ‘Fortescue Dönüşümleri’ olarak da anılan dönüşüme yazar
‘simetrili bileşenler’ adını vermiştir. Bu önemli dönüşümün kullanımı ilk anda konvansiyonel çözümlere
göre daha karmaşık gelebilir. Zira önce N fazdan oluşan dengesiz sistem dengeli N adet sisteme
dönüştürülecek, her bir devre geleneksel çözüm metotları ile çözülecek ve hesaplanan yeni sonuçlar
tekrar ilk hallerine (faz koordinatlarına) dönüştürülecektir. Fakat uygulama dengesiz bir sistemin faz
koordinatlarında doğrudan çözümünden çok daha kolay olduğunu göstermiştir.
Simetrili bileşenler dönüşümünü daha iyi anlayabilmek için daha önceki bölümlerde izah edilen üç fazlı
sistemi ele alalım. Normal işleme şartlarında her bir faza ait gerilim vektörünün iki unsuru vardır bunlar
gerilimin genliği ve herhangi bir referansa göre açısıdır. Bu durumda üç fazlı sistemde altı değişkenden
söz etmek mümkündür. Bunlar her bir faz için Ua, Ub, Uc, βa, βb, ve βc şeklinde verili ise bir faza ait
vektör ifadesi Ua= Ua/βa şeklinde yazılabilir. Her bir faza ait bu ifadelerin üç değişik bileşene
bölünebileceğini düşünelim bu durumda her bir faza ait ifade
Ua=Ua0+Ua1+Ua2
Ub=Ub0+Ub1+Ub2
Uc=Uc0+Uc1+Uc2
. 11
haline gelir. 1 altyazısına sahip ifadelerin bir araya getirilerek dengeli üç fazlı bir sistem meydana
getirmeye zorladığımızı düşünelim ve bu sete pozitif sıra diyelim. Faz sırasını kaydırarak iki altyazısına
i
Gerçek hayatta dengeli bir sistem çok nadir karşılaşılan bir durumdur. Ancak çeşitli teknikler
yardımıyla sistem dengesizliği asgari tutularak, bu varsayımın gerçekçi olması sağlanır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
10
sahip sete de aynı işlemi yaptığımızda geriye kalan sıfır altyazılı set üç fazlı bir sistem olmaya
zorlanamaz fakat faz ve genlik bakımından birbirine eşit hale gelebilir. İki alt yazılı sete negatif sıra
sonuncuya ise sıfır sıra dediğimizde Fortescue’nun dönüşümünü elde etmiş oluruz.
1.6.1 a işlemcisi
Karmaşık sayıları ifade etmek için kullanılan j işlemcisini hatırlarsak, bu sayı 1/90 şeklinde kutupsal
düzlemde ifade ediliyor ve bir vektörün genliğini değiştirmeden 90° döndürülmesi işlemini sağlıyordu.
Benzer tarzda bir vektörü genliğini değiştirmeden 120° döndürmek için a işlemcisi kullanılabilir. Bu
durumda a, 1/120 şeklinde yazılabilir. 11 de verilen ifade de yer alan terimler incelenirse birinci sıraya ait
büyüklükler için
Ub1=a2Ua1
Uc1=aUa1
. 12
ifadesi yazılabilir. Negatif ve sıfır sıralar için de benzer şekilde,
Ub2=aUa2
Uc2= a2Ua2
Ub0=Ua0
Uc0= Ua0
. 13
yazılabilir. Bu bağıntılar kullanılarak . 11 de verilen ifade düzenlenirse,
Ua=Ua0+Ua1+Ua2
Ub= Ua0+ a2Ua1+ aUa2
Uc= Ua0+ aUa1+ a2Ua2
. 14
olur. Kolaylık olması için birinci fazın sembolü a yazımdan düşürülerek denklem takımı matris
biçiminde yazılacak olursa
U abc = aU 012
U a 1 1
U = 1 a 2
b
U c 1 a
1 U 0
a U 1
a 2 U 2
. 15
bulunur. a matrisinin tersi kullanılarak kolaylıkla faz bileşenlerine dönmek mümkündür. Bu dönüşüm
akımlar içinde aynı şekilde kullanılabilir.
I 012 = aI abc
1 1
I0
I = 1 1 a
1 3
1 a 2
I 2
1 I a
a 2 I b
a I c
. 16
Bu dönüşümün asıl etkisi devre empedanslarında görülecektir.
1.6.2 Simetrili bileşenlerin empedanslara etkisi
Herhangi bir üç fazlı sistemde akım ve gerilimler arasındaki bilinen bağıntı
Uabc=[Zabc]Iabc
şeklinde yazılabilir. Burada Zabc sistemin karşılıklı ve öz empedanslarını simgelemektedir. Bu denkleme
dönüşüm uygulanacak olursa.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
11
aU012=[Zabc]aI012
U012=a-1[Zabc]aI012
. 17
yazılabilir. Buradan Z012 şu şekilde tanımlanırsa
[Z012]=a-1[Zabc]a
U012=[Z012]I012
. 18
Simetrili bileşenlerdeki empedans matrisini önemli kılan nokta yukarda verilen tanımda yatmaktadır.
Normal bir güç sistemine ait empedans matrisi genelde diyagonal değildir ancak genelde öyle bir simetri
taşımaktadır ki bu simetri simetrili bileşenlere ait empedans matrisinin diyagonal bir karakter taşımasını
sağlar. Bu da sistem analizini çok büyük ölçüde basitleştirmektedir.
1.6.3 Simetrili bileşenlerde güç
Üç fazlı bir sistemde güç
Sabc=UaI*a+UbI*b+UcI*c
Sabc=UTabcI*abc
. 19
şeklinde yazılabilir. Bu bağıntıya simetrili bileşenler dönüşümü uygulanacak olursa,
Sabc=[aU012]T[aI012] *
Sabc=UT012aTa*I*012
. 20
T *
yazılır. a a ifadesi çözülecek olursa sonucun 3 çıktığı görülecektir. Bu durumda . 20 de verilen ifade
yeniden yazılabilir.
Sabc=3UT012I*012
Sabc=3[U0I*0+U1I*1+U2I*2]
. 21
Bu bağıntıda enteresan olan nokta her üç devrenin birbirinden tamamen bağımsız olmasıdır. Bu
transformasyonun gücünün önemli bir göstergesidir.
Bazı yazarlar a operatörünü 1/√3 ile çarparak farklı bir dönüşüm de kullanmaktadır. Bu terimin
eklenmesi ile güç bağıntısındaki 3 ifadesi tamamen kaybolmaktadır. Fakat bu tarz dönüşüm çok fazla
bir kullanım alanı bulmamıştır [10].
2
Sistem modellemesi
Bu kısımda, elektrik güç sistemlerini oluşturan temel unsurların gerekli olan çalışmaları gerçekleştirmek
için modellenmesinde takip edilmesi gereken metotlar üzerinde duracağız. Herhangi bir sistem elemanı
sistemle ilgili yapılacak çalışmanın ihtiyaçlarına göre modellenmelidir. Mesela nakil hatlarının mekaniki
mukavemeti ile alakalı bir çalışma yapılacak ise bu hatların elektriki özelliklerinin bu çalışmaya bir
etkisi olmayacağı açıktır. Bu tip bir çalışmada önemli olan kullanılan malzemenin kopma, kesilme,
burulma dayanımları, çapı vs.dir. Fakat şurası akılda tutulmalıdır ki bu özellikler malzemenin kendinden
bağımsız değildir. Modellerle çalışırken her zaman akılda tutulması gereken husus bunun model olduğu
ve modellediği elemanın tam olarak yerini tutmasının mümkün olmadığıdır.
Güç sistemlerinin temel elemanları hatlar, transformatörler ve üreteçlerdir. Sistemde bunlardan başka
elemanlar da olmakla beraber, ki bunların başında çeşitli özelliklere sahip yükler gelmektedir, bu
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
12
elemanların modelleri yapılacak çalışmaya fazlasıyla bağlı olduğundan yeri geldikçe incelenecektir. Bu
bölümde zikredilen üç temel elemanın modellemesi üzerinde durulacaktır.
Nakil hatları, direkler üzerine tutturulmuş iletkenler (havai hatlar) veya yeraltına döşenmiş kablolardan
meydana gelirler. İletilen gücün çeşitli gerilim seviyelerine dönüştürülmesi işlemi transformatörlerle
gerçekleştirilir. Nakil hatlarının elektriki özellikleri yani empedansı ve yüklenebilme sınırları bizim
çalışmalarımız için önemlidir. Bununla beraber çalışmanın ihtiyacına göre bu empedans değerlerinde de
basitleştirmeler yapılabilmektedir.
Transformatörler sıkıştırılmış silisyumlu saçlar tarafından halkalanan manyetik devreye sahip
elemanlardır. Sistemin ihtiyacına göre çeşitli tiplerde ve sargı tarzlarında imal edilirler.
Transformatörlerin de en önemli unsuru transformatör eşdeğer devresini oluşturan elemanların
değerleridir. Bu değerler çeşitli tip deneyleri ile ölçülebilir veya üretici tarafından verilen katalog
değerlerinden hesaplanabilirler. Yapılacak çalışmaların ihtiyaçlarına göre eşdeğer devreler çok basit
veya karmaşık yapıda olabilir.
Güç sistemlerinde temel üreteç tipi senkron makinalardır. Özellikle son yıllarda rüzgar türbinlerinin
ehemmiyeti çevreci gurupların baskısıyla artmakla beraber asenkron genaratörler de güç sistemlerinde
kullanılmaya başlamıştır. Fakat genel güç sistemleri içerisinde asenkron makinaların ağırlığı çok küçük
oranlarda kalmaktadırlar. Bu sebeple üreteç aksi belirtilmediği sürece senkron genaratöreler manasına
kullanılacaktır. Senkron makinalar modellenmesi en karmaşık olan cihazlardır. Özellikle sistem
dinamiği ile ilgili çalışmalarda dinamik modellemenin temel unsuru olmaları bakımından ve mekanik
aksamında bu çalışmalarda belirleyici olduğundan bu çalışmalar için modellenmesi üzerinde bu kısımda
durulmayacaktır. Dinamik modeller bu konunun incelendiği kısımda verilecektir.
2.1
Hatlar
Elektrik enerjisi genelde bakır veya alimunyum dan yapılmış havai hatlarla veya yine aynı özelliklere
sahip metallerden imal edilmiş kablolarla gerçekleştirilmektedir. Güç sistemleri için gerekli olan
parametreler;
•
direnç,
•
kapasitans,
•
endüktans,
•
kondüktans
olarak sıralanabilir. Bu parametrelerin ilk üçü bizim çalışmalarımız için önem arz etmektedir.
Kondüktans yani havai hatlardan hava üzerinden birbirlerine veya toprağa ve kabloların izolâsyon
malzemesi üzerinden yine birbirlerine veya toprağa olan sızıntı akımının modellenmesi için
kullanılmaktadır. Pratikte bu sızıntı akımı ihmal edilebilecek derecede küçük olduğundan burada
incelenmeyecektir. Bu parametreler normalde hat veya kablonun üzerinde dağıtılmış biçimde yer
almaktadır. Fakat pratik nedenlerle bu değerler birleştirilerek (lumped) veya belirli uzunluklarla
dağıtılarak (distributed) hesaplanmaktadır. Hat veya kabloların uzunluklarına göre bu modelleme
tekniklerinde biri kullanılmaktadır bu modeller ve bu modellerin kullanımı üzerinde ayrıca durulacaktır.
Nakil hatlarının elektriki parametreleri bu hatları oluşturan
•
iletkenlerin elektriki özelliklerine,
•
havai hatları taşıyan direklerin fiziki yapısına,
•
yer altı kablolarının düzenleniş biçimine,
•
iletkenlerin yer aldığı ortamın özelliklerine
bağlıdırlar. Bu özelliklere bağlı olarak her bir parametre hesaplanabilir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
13
2.1.1 Direnç
Bir iletim hattının direnci dendiğinden aksi belirtilmediği müddetçe etkin direnç anlaşılmalıdır. Etkin
direnç hattın aktif kayıplarına sebep olan parametredir.
R=Pk/I2
. 22
şeklinde hesaplanabilir. Burada Pk iletkenin toplam aktif kayıplarını göstermektedir. Bu direnç değeri
şayet akımın iletkenin kesiti üzerine dağılımı düzgün ve eşitse iletkenin doğru akım direnç değeri ile
aynıdır. Ancak bilinmektedir ki sadece doğru akım iletken kesitinin tamamını kullanarak, doğru ve
düzgün bir akım akmasını sağlamakta Alternatif akım ise çeşitli etkilerle iletken kesitinin tamamını
kullanamamaktadır.
Taşınan akımın frekansı arttıkça düzgün olmayan akım dağılımı daha da belirgin hale gelmektedir. Bu
olay ‘deri etkisi’ (skin effect) olarak isimlendirilmektedir. Dairesel kesite sahip bir iletkende akımın
dairenin merkezindeki yoğunluğu çevresindeki yoğunluğunda fazla olmakta bu olay iletkenin etkin
kesitini düşürecek yönde bir sonuç doğurmaktadır. Güç frekansında bile bilhassa büyük kesitli
iletkenlerde deri olayının iletken direncinde önemli etkiler meydana getirmektedir. Bu etkiyi hesaplamak
için ileri bölümlerde incelenecek metotlar geliştirilmiştir.
Yan yana iki iletkenden akan akımların oluşturduğu düzgün olmayan manyetik alanlar her iki iletkenden
akan akımların dağılımını etkilemektedir. Bu olaya ‘yakınsaklık etkisi’ (proximity effect) denmektedir.
Yakınsaklık etkisi sebebi ile iletkenin etkin kesiti değişmektir. Bu olay frekans, iletken kesiti ve
iletkenler arasındaki mesafe ile doğru orantılıdır.
Son olarak herhangi bir manyetik alan yakınındaki iletkenlerde bir gerilim indükleyecek ve bu gerilim
kapalı akımların akmasına sebep olacaktır. Bu olaya fuko akımları (eddy current) olayı denmektedir. Bu
olay genelde hatlar için çok büyük bir önem taşımamakla beraber özellikle elektromekanik cihazlarda ve
transformatörlerde ehemmiyetlidir.
Bir iletkenin DA direnç değeri R0 iletkenin fiziksel sabiteleri (özdirenç, ρ) ve büyüklükleri (kesit, s ve
uzunluk, l) ile alakalıdır.
R0=ρl /s
. 23
SIi birim siteminde uzunluk m, kesit mm2, ve özdirenç Ω-m olarak verilmektedir. Özellikle Amerikan
yazınında Anglo-Sakson birimleri kullanılmakta ve üreticiler iletkenlerle ile alakalı büyüklükleri bu
birimlerle vermektedirler.
Güç tesislerinde kullanılan iletkenler mekaniki mukavemeti arttırmak ve burulma, darbe, sallanma gibi
sebeplerle oluşabilecek zedelenme ve yorulmaların önüne geçebilmek için spiral şeklinde bükülerek bir
araya getirilirler. Gerek her bir telin oksitlenmesi ve kirlenmnesi sebebiyle akım her bir telin kesitini
kullanarak akar. Dolayısıyla bükülerek bir araya getirilmiş çok telli iletkenlerin DA dirençleri normal
şartlarda . 23 de hesaplanan değerden fazladır. Zira burulma neticesinde merkezdeki iletken
dışındakilerin gerçek boyu iletkenin boyundan uzun olacaktır. Bu sebeple iletkenin direncindeki artış
büklüm boyuna bağlıdır. Büklüm boyu ise büklüm tabaka sayısına ve toplam bükülen iletken sayısına
bağlı olacaktır. Üç tabakalı bükülmüş bir iletkenin DA direncindeki artış %1 olarak öngörülmektedir.
2.1.1.1 Direncin sıcaklıkla değişimi
İletkenin direnci ortam sıcaklığı ile de değişmektedir. Bu değişimin güç sistemlerini ilgilendiren aralıkta
doğrusal (lineer) olduğu bilinmektedir. Bu bilgiden hareketle herhangi bir sıcaklıktaki direnci bilinen
iletkenin başka bir sıcaklıktaki direnci orantı yoluyla bulunabilmektedir. Direncin sıcaklıkla değişimi bir
i
SI, Uluslararası Birim Sisteminin resmi kısaltmasıdır. Bu notlar boyunca SI birim sistemi
kullanılacaktır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
14
grafik üzerinde gösterilecek ve doğrusal grafik sıcaklık eksenini kesecek şekilde uzatılacak olursa her bir
malzemeye ait zahiri bir sıcaklık değeri Şekil 5 de gösterildiği gibi elde edilir.
t
t2
t1
R1 R2
R
T
Şekil 5 Metalik bir malzemeye ait direncin sıcaklıkla değişim eğrisi.
Bu sıcaklık değeri kullanılarak istenen sıcaklıktaki direnç değeri . 24 de verildiği gibi hesaplanabilir.
R2/ R1=(T+t2)/( T+t1)
. 24
Bu orantıda sıcaklıklar Celsius derecesinde (°C) dirençler ise Ω olarak verilmiştir. T sabitesinin değeri
soğuk haddelenmiş bakır ve alimunyum iletkenler için 228 ve 241 olarak, normal bakır için ise 234.5
olarak verilmiştir.
2.1.1.2 Deri etkisi
Akımın dairesel kesitli bir iletkenin içerisindeki dağılımı düzgün ve eşit olmadığı daha önce söylenmişti.
Bu düzgün ve eşit olmayan (non-uniform) dağılımdan dolayı iletken direncinde olabilecek değişim
hesaplanabilir değişimdir. Bu hesaplama hayli karmaşık ve çok değişkenli bir karakter arzetmektedir.
Fakat bu hesaplamayı yapabilmek için bazı kabuller ve basitleştirmeler yapmak mümkündür. İlk olarak
sonsuz uzunlukta dairesel kesitli bir iletken ele alalım. Bu iletkenden akan akımın frekansı sabit ve
iletkenin içinde bulunduğu ortam şu özelliklere sahip olsun.
1. Lineer (malzemenin özellikleri manyetik alanın şiddetinde bağımsız).
2. İsotropik (her yönde aynı özelliklere sahip).
3. Homojen (pozisyondan bağımsız)
4. Zamandan bağımsız.
Bu varsayımlar doğrultusunda belli bir l uzunluğuna sahip iletkenin Şekil 6 da gösterildiği gibi
yerleştirildiğini kabul edelim.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
15
Kesit s
dh
h
Z
l
Şekil 6 Dairesel bir iletkenin durumu.
Akımın iletken içindeki dağılımını (yoğunluğunu, J) hesaplamak için Şekil 6 da Z orijinine göre durumu
gösterilen iletkenin manyetik ve elektrik alan yoğunlukları (H, E) için yazılan ve . 25 de verilen
denklemleri uygun teknikler kullanarak çözmek gerekmektedir.
dE(h,t)/dh=dB(h,t)/dt
dH(h,t)/dh+H(h,t)/h=J(h,t)+dD(h,t)/dt
. 25
Burada şayet iletkenin iletkenliği σ, geçirgenliği µ ve di-elektrik sabiti (permittivity) ε ile gösterilecek
olursa,
B(h,t)= µH(h,t)
D(h,t)= εE(h,t)
J(h,t)= σE(h,t)
. 26
şeklinde yazılabilir. Her iki denklemde alan büyüklüklerinin h ve t ye bağlı olduğu kabul edilerek
Maxwell denklemlerinin silindirik koordinat eksenine uygulanması ile elde edilmişlerdir. Bu denklem
takımlarının çözümü akım dağılımını bulmamızı sağlayacaktır [11].
d 2 J (h)
dh
2
+
dJ ( h )
− ( jωµσ − ω 2 µε )J ( h ) = 0
hdh
. 27
Bu denklemlerin çözümü oldukça karmaşık ve tekrar basitleştirmelere ihtiyaç gösterecek yapıdadır. Bu
sebeple deri olayını formüle etmek için daha basit fakat yeterince pratik ve daha kolay anlaşılabilir bir
metot da mevcuttur. Bu metot iletkenin AC direncinin yaklaşık olarak ortası boş bir iletkenin DC
direncine eşit olduğu kabulüne dayanmaktır. Bu ortası boş (boru şeklinde) hayali iletkenin et kalınlığı
akımın girme (depth penetration) δ miktarına eşittir.
r
δ
Şekil 7 AC direncin hesaplanması
Bu girme miktarı δ şu şekilde hesaplanabilir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
16
δ=2/(µωσ)0.5
. 28
Bu denklem kullanılarak AC direnç yaklaşık olarak belirlenebilir.
RAC=ρl /sAC
. 29
Burada sAC boru şeklindeki iletkenin kesitidir. Girme miktarı frekansa bağlı olduğundan girme
miktarının iletkenin yarıçapından büyük olduğu durumlar ortaya çıkabilir. Bu deri olayının ihmal
edilebilir düzeyde olduğunu gösterir [12].
Enerji nakil hatları için genellikle alimunyum veya bakır gibi manyetiklik özelliği olmayan iletkenler
kullanılmakla beraber özellikle havai hatlarda mukavemet ihtiyacının fazla olması sebebiyle ortası çelik
tellerle kuvvetlendirilmiş iletkenler kullanılmaktadır. Yine yeraltı kablolarının darbelere dayanımını
artırmak için dış yüzeyleri çelik bir zırhla (shield) kaplanmaktadır. Çeliğin manyetiklik özelliğinin çok
yüksek olması deri olayının etkisini değiştirecektir [11]. Fakat bu değişim sadece hat parametreleri
düşünüldüğünde çok yüksek düzeylerde değildir. Fakat ileri bölümlerde hatların kayıpları ve topraklama
sistemlerinin performanslarını incelerken bu manyetik malzemelerin önemli etkilere sebep olduğu
görülecektir. Bu etkiler yeri geldiğinde incelenecektir.
Elektriki güç sistemleri genellikle topraklanmış olarak çalışırlar dolayısıyla toprak ilave bir akım yolu
olarak çalışır. Fakat dengeliye yakın ve normal şartlar altında topraktan akan akım miktarı çok küçük
düzeylerdedir. Ancak özellikle toprağında dahil olduğu arıza durumlarında bilhassa da tek faz toprak
kısa devresinde akımın tamamına yakın bir bölümü toprak üzerinden devresini tamamlar. Bu durumda
toprak ve toprağın şartları devrenin toplam direncini etkileyecektir. Bu etkileme sadece arıza durumunda
olacağı için genellikle sıfır sıra dirençleri üzerinde bir ayarlama yapılarak bu durum arıza hesaplarına
dahil edilmektedir [13].
2.1.2 Endüktans
Bu bölümde ilk önce endüktansın genel manası üzerinde duracağız. Bunun için paralel iki iletkenin
etrafında yer alan akıları incelememiz gerekmektedir. Şekil 8 de bu akı dağılımı basit olarak
gösterilmektedir.
Şekil 8 Paralel iki iletken çevresinde yer alan akıların dağılımı.
Bu akı dağılımımdan dolayı oluşabilecek herhangi bir iletkenin endükansını hesaplayabilmek için iki
temel denklemi kullanmamız gerekmektedir. Bunlardan birincisi endüklenen gerilim ile halkalanma
akısındaki değişimi alakalandıran denklemdir. Faraday kanunlarına göre ve endüklenen gerilim e ile
gösterilecek olursa,
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
17
e=dλ/dt
. 30
burada λ halkalanma akısını temsil etmektedir. Şayet iletkenden akan akım zamana bağlı olarak
değişiyorsa bu akımın meydana getireceği manyetik alan da değişmektedir. Dolayısıyla halkalanma akısı
zamana bağlı değişim gösteren bir karakter arz eder. İletkenin içinde bulunduğu ortamın geçirgenliği
sabit ise halkalanma akısı devreden akan akım ile doğru orantılı olacaktır. Halkalanma akısının ani
değeri ile akım arasındaki bu doğrusal ilişki bir değişimin sabiti, L ile gösterilecek olursa,
λ=Li
. 31
şeklinde yazılabilir. λ halkalanma akısının ani değeridir. Bu yeni oranı kullanarak endüklenen gerilim şu
şekilde hesaplanabilir.
e=Ldi/ dt
. 32
L sabiti devrenin manyetik özellikleri ile alakalıdır ve genellikle devrenin self-endüktansını temsil
etmektedir. Her iki denklem . 30 ve . 32 endüktans değeri için çözülecek olursa,
L=dλ/di
. 33
yazılabilir. Yukarıdaki denklem . 33 endüktansın genel tanımıdır. Akım sinüs biçimli bir değişim
gösterdiği takdirde halkalanma akısı da sinus biçimli bir değişim gösterecektir. Halkalanma akısının
fazör gösterimi Ψ sembolü ile yapılacak olursa.
Ψ=LI
. 34
şeklinde yazılabilir. Bu durumda self-endüktans sebebiyle meydana gelebilecek gerili düşümünün fazör
ifadesi frekansa bağlı olarak,
V=jωLI
. 35
şeklinde verilir.
İki devreden akan akımların meydana getireceği akıların birbirleri üzerinde endükleyeceği gerilimler ve
bunların sebep olacağı endüktans ise karşılıklı (mutual) endüktans olarak isimlendirilmektedir. Karşılıklı
endüktans bir devreden akan akımın I2 karşı devrede meydana getireceği halkalanma akısının Ψ12 bir
ürünüdür. İkinci devrenin birinci devrede meydana getireceği karşılıklı endüktans M12 şeklinde
gösterilecek olursa
M12= Ψ12/I2
. 36
şeklinde yazılabilir. Karşılıklı endüktans paralel hatların ve özellikle iletim hatları ile haberleşme
hatlarının birbirlerine etkisini incelemede önem arz etmektedir.
2.1.2.1 İletkenin içindeki akı dağılımı
Şekil 8 de sadece iletkenlerin dışında yer alan akılar verilmiştir. Bilinmektedir ki iletkenin içinde de
akılar yer almakta ve bu iletkenin endüktansı üzerinde etkili olmaktadır. İletkenin içindeki akılar
sebebiyle meydana gelecek olan endüktansı belirleyebilmek için ilk önce iletkenin içindeki halkalanma
akısını bilmek gerekmektedir. İletkenin içindeki halkalanma akısı ile akımın oranı bize bu endüktans
değerini verecektir. Fakat halkalanma akısı bu sefer iletkenden akan akımın tamamıyla değil küçük bir
kısmıyla ilintilidir. Problemin daha iyi anlaşılması için Şekil 9 da verilen kalınca bir iletkenin kesitini
inceleyelim.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
18
Akı
ds
x
dx
r
Şekil 9 Bir iletkenin kesiti.
Şekil 9 a yakından bir bakış şu sonuca ulaştıracaktır. Herhangi bir kapalı akı hattının meydana getireceği
amper-tur cinsiden magnetomotorkuvvet (mmk) bu akı tarafından halkalanan akıma eşittir. Bu
iletkenden akan akımın dönüş yolunun manyetik akı dağılımını etkilemeyecek kadar uzakta olduğu
kabul edilecek olursa ve mmk in akı yolundaki manyetik alan şiddetinin tanjentiel bileşeninin çizgisel
entegraline eşit olduğu göz önüne alınırsa,
mmk = ∫ H ⋅ ds = I
. 37
burada H manyetik alan şiddetini s, akı yolunun uzunluğunu, I ise halkalanan akımı temsil etmektedir
nokta operatörü manyetik alan şiddetinin tanjentiel bileşen ile ds arasındaki ilişkiyi göstermektedir.
İletkenin merkezinden x uzaklıktaki alan şiddeti Hx ile gösterilecek olur, alan şiddetinin simetrik ve her
noktada aynı olduğu varsayılacak olursa. 37 da verilen integralin çözümü,
2πxHx=Ix
. 38
olur. Akım yoğunluğunun düzgün (uniform) olduğu kabul edilirse,
Ix=Iπx2/ πr2
. 39
yazılabilir. Denklem . 39 i . 38 de yerine koyacak olursak alan şiddetini bulabiliriz. Buradan akı
yoğunluğu bulunabilir.
Bx=µHx=µxI/2πr2
. 40
Burada µ iletkenin manyetik geçirgenliğidir. dx kesitindeki iletkenin manyetik akısı dΦ ise birim
uzunluk için akı bulunabilir. Birim uzunluk için bu akıya bağlı halkalanma akısı ise bu kesitten akan
akım ile orantılıdır. Akımın dağılımı uniform ise bu kesitten akan akım bu kesit ile iletken kesitinin
oranıyla bulunabilir.
πx 2
πx 2 µxI
=
φ
d
dx
πr 2
πr 2 2πr 2
µx 3 I
=
dx
2πr 4
dλ =
. 41
İletkenin içindeki toplam halkalanma akısını bulmak için . 41 merkezden iletkenin dışına doğru entegre
edilecek olursa,
µx 3 I
µI
dx =
4
8π
0 2πr
r
λToplamiç = ∫
. 42
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
19
birim uzunluk için bulunur. Buradan birim uzunluk için iç-endüktans,
Liç=µ/8π
. 43
bulunur. Bu sonucun güvenilir olduğu çok farklı yöntemler kullanılarak da denenebilir mesela [14] e
bakabilirsiniz.
Burada kullanılan yöntem ile bir iletkenin dışındaki alan sebebiyle oluşacak olan halkalanma akısı
sebebiyle meydana gelecek olan endüktans da hesaplanabilir.
2.1.2.2 Tek fazlı iki damarlı hatların endüktansı
Üç fazlı ve değişik kombinasyonlu hatların endüktansının hesabından önce tek fazlı iki solid iletkenden
oluşan hatların endüktansını incelemenin faydalı olacağı kanaatiyle Şekil 8 de verilen iletkenlerin
durumunu inceleyelim. İletkenler arasındaki mesafe D ve kesitleri sırasıyla r1, r2 ile gösterilecek ve
iletkenlerden birinin diğerinden akan akımın dönüş yolu olduğu kabul edilecek olursa. Birinci iletkenin
meydana getireceği manyetik akının sadece ikinci iletkeni halkalayan kısmı kullanılarak hesaplanmak
zorundadır. Açık ifade ile D-r2 ve D+r2 arasında kalan uzaklıktaki akılar bu hesaplamada söz konusu
olacaktır. Bir önceki bölümdeki hesaplama hatırlanacak olursa bu aralıktaki her bir akı iletkenden akan
tüm akımı değil ancak kestiği akım parçasını halkalayacaktır. Bu gerçeğin hesaplamayı hayli karmaşık
hale getireceği açıktır. Şayet basitleştirme amacıyla iletkenler arasındaki mesafenin iletkenlerin yarı
çapından çok büyük olacağı kabul edilecek olursa ki bu havai hatlar için hakikattir akının halkaladığı
akım miktarını hesaplamaya dahil etmek yerine D mesafesindeki iletkenden akan tüm akımı bu
mesafedeki akının halkaladığı kabul edilebilir. Bu yaklaşıklık hesaplamayı basitleştirmekle beraber D
küçük olsa bile doğru sonuç vermektedir [8].
Bir iletkenin merkezinden x uzaklıktaki alan şiddeti Hx ise mmk ve akı yoğunluğu bu iletkenden akan
akıma bağlı olarak,
2πxHx=I
Bx=µI/2πx
. 44
yazılabilir. . 41 verilene benzer şekilde iletkenden D1, D2 uzaklıklarıyla sınırlanmış ve dx kesitindeki
mıntıka için manyetik akısı dΦ ise
dΦ=µIdx/2πx
. 45
iletkenden akan akımın tamamı bu akı tarafından halkalanmakta olduğu kabulü ile bu diferansiyel ifade
λ1, 2 =
D2
µI
µI
D2
∫ 2πrx dx = 2π ln D
D1
1
D1, D2 sınırlarında entegre edilecek olursa,
. 46
bu aralıktaki toplam halkalanma akısı bulunabilir. D2 yerine D ve D1 yerinede r1 yazılacak olursa birinci
iletkenin dış akısı ve bu akıdan dolayı oluşacak endüktans,
µI D
ln
2π
r1
D
µ
=
ln
2π
r1
λ1dıı =
L1dıı
. 47
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
20
yazılabilir. Daha önce bir iletkenin iç akı dağılımından dolayı mümkün endüktansı . 43 de hesaplanmıştı.
Her iki denklem birleştirilecek olursa Birinci iletkenden akım sebebi ile oluşacak endüktans,
L1 = Liç + Ldıı
µ
µ D
+
ln
8π 2π r1
=
. 48
-7
bulunur. Boşluğun geçirgenliği 4π.10 olarak verildiğinde,
1
D
L1 = + 2 ln 10 − 7
r1
2
. 49
olur. Diğer iletken için de aynı şekilde,
1
D
L2 = + 2 ln 10 −7
r2
2
. 50
yazılabilir. Her iki endüktansın toplamı devrenin toplam endüktasını verir.
1 1
D
D
L = + + 2 ln + 2 ln 10 −7
r1
r2
2 2
D
L = 1 + 4 ln
r1 r2
. 51
. 50 da verilen tek fazlı hatlar için bir iletkenin endüktansıdır. . 51 da verilen ise loop endüktansı olarak
isimlendirilmektedir. Her iki değerde bir metre uzunluk için geçerlidir.
2.1.2.3 Bir gurup içindeki iletkenin durumu
Üç fazlı hatlara geçmeden önce daha genel bir durumu inceleyelim. Şekil 10 da verilen n taneden oluşan
n
DnP
D4P
4
3
P
D3P
2
D2P
D1P
1
bir gurup iletkenin ele alalım ve bu iletkenlerin taşıdıkları I1, I2, I3, I4, … In akımların toplamı sıfır olsun.
Şekil 10 Taşıdıkları akımların toplamı sıfır olan bir gurup iletken.
İletkenlerin merkezinden uzak bir P noktasına olan mesafeler de D1P, D2P, D3P, D4P,…. DnP ile
gösterilmiş olsun. Şimdi birinci iletkenden akan akıma ait P noktasına göre iç ve dış halkalanma
akılarını hesaplayalım. I1 akımı sebebi ile meydana gelebilecek halkalanma akısı için denklem . 42 ve .
48 nin toplamına bakalım.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
21
λ1P1 =
µI1 µI1 D1P
+
ln
8π 2π
r1
. 52
Şimdi ikinci iletkenden akan akımın birinci iletkende halkaladığı akıya bakalım. Bunun için P noktası ile
ikinci iletken arasındaki mesafe D2P ve her iki iletken arasındaki mesafe D12 ile sınırlanmış bir alana
bakmamız gereklidir. Denklem . 48 yi bu mesafelere uygularsak,
λ1P 2 =
µI 2 D2 P
ln
2π
D12
. 53
olur. Bu formül ışığında her bir iletkenin birinci iletken üzerinde meydana getireceği halkalanma akısını
P noktasına kadar dikkate alarak,
λ1P =
µI
D
µI 1 µI 1 D1P µI 2 D2 P µI 3 D3 P µI 4 D4 P
+
ln
+
ln
+
ln
+
ln
+ " + n ln nP
r1
D12
D13
D14
D1n
8π
2π
2π
2π
2π
2π
. 54
yazılabilir. Gurup içindeki iletkenlerden akan akımların toplamı sıfır olduğu verildiğine göre In akımı bu
denklikten çözülecek ve . 54 de yerine yazılacak ve benzer terimler bir araya getirilecek olursa,
µI 1
λ 1P =
8π
+
µI 1
2π
+
ln
µI 1
2π
D 1P
D nP
ln
1
r1
+
+
µI 2
2π
µI 2
2π
ln
ln
D2P
D nP
1
+
D12
+
µI 3
2π
µI 3
2π
ln
ln
D 3P
D nP
1
D13
+
+
µI 4
2π
µI 4
2π
ln
ln
1
D14
D 4P
D nP
+"+
+"+
µI n
2π
µI ( n − 1)
2π
ln
ln
1
D1n
D ( n − 1) P
D nP
. 55
yazılabilir. P noktası sonsuz uzaklığa çekilecek olursa bu noktayla iletkenler arasındaki mesafenin
oranına bağlı terimler 1 e yaklaşırken bu terimlerin logaritması sıfıra eşitlenir. Bu durumda bu terimleri
ihmal ederek,
λ1 =
µI
µI
µI 1 µI 1 1 µI 2
µI
1
1
1
1
+
+ 3 ln
+ 4 ln
+ " + n ln
ln
ln +
D12 2π
D13 2π
D14
D1n
2π
8π
2π r1 2π
. 56
yazılır. Böylece bir gurup iletken içindeki tek bir iletkene ait toplam halkalanma akısı miktarı bulunmuş
olur. Akım alternatif akım ise bu akımın ani değeri kullanılarak akının ani değeri ve buna bağlı rms
değeri hesaplanabilir.
2.1.2.4 Çok telli tek fazlı iletkenler
Elektrik hatları genellikle büklümlenmiş çok telli iletkenlerden meydana gelirler. Bu iletkenler farklı
elektriki ve manyetik özelliklere sahip olabilirleri. Bu kısımda bu tip iletkenlerin endüktansı incelenecek.
Bu durumla ilgili yapacağımız en önemli basitleştirme her bir telden akan akımın aynı olduğu yani
akımın iletken teller arasında eşit dağıldığıdır. İletkenler Şekil 11 de verildiği gibi dizilmiş olsun.
i
Mesela çelik katkılı alimunyum iletkenler.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
22
c'
c
b'
b
a
m
a'
n
Y iletkeni
X iletkeni
Şekil 11 Büklümlü iletkenlerden oluşan tek fazlı hat.
Akım iletken telleri arasında eşit dağıldığına göre n tane büklümden meydana gelen X iletkeninin her bir
telinden akan akım I/n, bu akımın dönüş yolunu teşkil eden ve m tane büklümden meydana gelen Y
iletkenin her bir telinden akan akım -I/m olacaktır. İletkenler arasındaki mesafe D ile gösterilecek olur
ve X iletkenin a telinin halkalanma akısı . 56 kullanılarak ve boşluğun geçirgenliğii yerine yazılarak,
I 1
n 4
λa = 2.10 −7 + ln
1
1
1
1
+ ln
+ ln
+ " + ln
ra
Dab
Dac
Dan
I
1
1
1
− ln
+ ln
+ " + ln
Dab '
Dam
m Daa '
. 57
sonucuna ulaşılır. Logaritmanın özellikleri dikkate alınarak ve ¼ ün ln(e1/4) e eşit olduğu göz önüne
alınarak,
λa = 2.10 −7 I ln
m
Daa ' Dab ' Dac ' " Dam
n
e1/ 4 ra Dab Dac " Dan
. 58
sonucuna ulaşılır. Buradan bu iletkene ait a telinin endüktansı,
La =
λa n
I
= 2n.10
−7
m
I ln
n
D aa ' D ab ' D ac ' " D am
e 1 / 4 ra D ab D ac " D an
. 59
şeklinde yazılabilir. Benzer şekilde b için ve diğerleri içinde endüktans hesaplanabilir.
Lb = 2n.10 − 7 I ln
m
Dba ' Dbb ' Dbc ' " Dbm
n
e1 / 4 rb Dba Dbc " Dbn
. 60
Kolaylık sağlaması için her bir telin endüktansı toplanarak tel sayısına bölünürse her bir telin ortalama
endüktansı bulunur. Bu değer kullanılarak iletkenin toplam endüktansı paralel bağlı enüktanslardan yola
çıkarak,
Lx=Lort/n=(La+ Lb+ Lc+…+Ln)/n2
. 61
yazılır. Her bir endüktans değeri . 61 de yerine yazılacak ve benzer terimler toplanacak olursa,
i
Boşluğun geçirgenliği 4π10-7H/m olarak verilidir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
23
L x = 2.10 −7 I ln
mn
( Daa ' Dab ' Dac ' " Dam )( Dba ' Dbb ' Dbc ' " Dbm ) " ( Dna ' Dnb ' Dnc ' " Dnm )
n2
( Daa Dab Dac " Dan )( Dba Dbb Dbc " Dbn ) " ( Dna Dnb " Dnn )
. 62
1/4
1/4
1/4
Daa, Dnn, gibi terimler e ra, e rn, gibi terimleri karşılamak için kullanılmıştır. e iç endüktans sebebi
ile ortaya çıkan bir katsayıdır ve değeri yaklaşık olarak 0.7788 olduğundan yarıçapın bu değerle
çarpılması ile eşdeğer yarıçap hesaplanabilir. Denklem . 62 incelenecek olursa logaritmik terimin iki
parçası vardır bölen ve bölünen. Her ikisi de köksel ifadelerdir. Bölünen terime bakacak olursa bunun m
tane tele sahip Y iletkeni ile n tane tele sahip X iletkeni arasındaki mesafelerin çarpımının kökü olduğu
görülür. Bu şekildeki bir ortalamaya karşılıklı geometrik ortalama uzaklık denmektedir ve kısaca GMD
(Geometric Mean Distance) ile gösterilir. Bölen terim de benzer tarzda X iletkenini oluşturan teller
arasındaki mesafelerin geometrik ortalamasıdır. Buna da kısaca self-GMD veya geometrik ortalama
yarıçap GMR (Geometric Mean Radius) denmektedir. Karşılıklı GMD terimi Dm ve self GMD terimi Ds
ile gösterilecek olursa,
L x = 2.10 − 7 I ln
Ds
Dm
. 63
halini alır. Dikkat edilecek olursa bu denklem . 51 da verilen ve solid iletken için çıkartılan denkleme
benzemektedir.
2.1.2.5 Üç fazlı hatların endüktansı
İlk olarak birbirleriyle eşit mesafeye yerleştirilmiş üç faz iletkeninin durumunu inceleyelim. Bu durumda
iletkenler eşkenar bir üçgenin üç köşesine yerleşmiş olacaktır.
Faz b
D
D
Faz a
D
Şekil 12 Eşit aralıklı yerleştirilmiş iletkenler.
Faz c
Üç fazın dengeli yüklendiğini yani üç faz akımlarının toplamının sıfır olduğunu kabul edelim. . 56
kullanarak birinci faz iletkenine ait halkalanma akısı,
λa =
µ I a µ I a 1 1 µI b
µI
1
1
ln +
ln
+
+ c ln
8π
2π
2π
2π
ra
D ab
D ac
λ a = 2.10 −7 I a ln
1
1
1
+ I b ln + I c ln
Ds
D
D
. 64
şeklinde yazılabilir. Boşluğun geçirgenliği yerine yazılarak ve ra terimi yerine iç akı sebebiyle oluşacak
endüktansı hesaba katarak Dsi değeri kullanılır ve Dab= Dab=D eşitliği gözönüne alınırsa,
. 65
yazılır. Akımların toplamının sıfır olduğu bilindiğine göre,
i
Ds daha önce açıklandığı üzere 0.7788r ye eşittir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
24
λa = 2.10 − 7 I a ln
1
1
+ ( I b + I c ) ln
Ds
D
1
1
= 2.10 − 7 I a ln
− I a ln
Ds
D
. 66
ve buradan endüktans,
La = 2.10 −7 ln
D
Ds
. 67
olarak hesaplanır.
Şayet iletkenler simetrik olarak yerleştirilmemişse her bir iletkenin endüktansı farklı olacaktır.
Dolayısıyla bu fazlar arasında endüktans bakımından dengesizliğe sebep olabilecektir. Bu problemin
önüne geçmek için hatlar iletkenlerin Şekil 13 de gösterildiği gibi eşit aralıklarla yer değiştirilmesi
Faz a
Faz c
Faz b
Faz b
Faz a
Faz c
Faz c
Faz b
Faz a
(Transposition) ile inşa edilirler. Böylece her bir fazın endüktansı diğer fazınkine eşit hale gelir.
Şekil 13 Transpoze edilmiş hatlar.
Fakat modern iletim hatları düzenli yer değiştirme yapılmadan inşa edilmektedir. Ekonomik sebeplerle
ancak belirli merkezlerde mesela kesici ve ayırıcı bulunan noktalarda hat kendiliğinden durmuşsa yer
değiştirme yapılmaktadır. Bu şekilde faz endüktansları arasında nispeten bir denge sağlanmaya
çalışılmaktadır.
Düzenli olarak transpoze edilmiş bir hattın ortalama endüktansını bulmak için her bir yer değiştirme
periyodunun endüktansı hesaplanarak bu değerin aritmetik ortalaması alınacaktır. Bu durumda her bir
periyot için halkalanma akısı . 65 kullanılarak,
λ a1 = 2.10 −7 I a ln
λ a 2 = 2.10 −7 I a ln
λ a 3 = 2.10 −7 I a ln
1
1
1
+ I b ln
+ I c ln
Ds
D12
D31
1
1
1
+ I b ln
+ I c ln
Ds
D23
D12
1
1
1
+ I b ln
+ I c ln
Ds
D31
D23
. 68
şeklinde yazılır. Bunun aritmetik ortalaması,
λa =
2.10 −7
1
1
1
3I a ln
+
+
I
ln
I
ln
b
c
3
Ds
D 12 D 23 D 31
D 31 D 12 D 23
. 69
olur. Akımların toplamı sıfır kabul edilirse,
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
25
λa = 2.10 − 7 I a ln
3
D12 D23 D31
Ds
. 70
ve endüktans,
La = 2.10 −7 ln
Deq
Ds
. 71
olur. Burada Deq üç iletken arasındaki geometrik ortalama mesafedir.
2.1.2.6 Toprağın etkisi
Üç fazlı güç iletim hatları o şekilde dizayn edilmişlerdir ki toprak bir dönüş hattı teşkil eder. Normal ve
dengeliye yakın çalışma şartlarında akımın çok küçük bir kısmı toprak üzerinden dönüşünü
tamamlayacaktır. Ancak özellikle normal olmayan koşullarda (mesela kısa devre) hatlar akımın büyük
kısmı toprak üzerinden dönecek şekilde inşa edilirler. Arıza durumunda toprak üzerinden devresini
tamamlayarak geri dönen akım (toprak akımı) iletim hattında bir gerilim endükler bu gerilim hattın
performansını ve empedansını etkileyecektir. Bu etkileme özellikle toplam devre direnci (loopresistance) üzerinde de belirgindir.
Bilinmektedir ki toprak akımı düzgün bir yol takip etmemektedir, ayrıca bu akımın toprak içindeki
dağılımı son derece karmaşık ve çevre şartlarının etkisine açık bir karakter arz etmektedir. Dolayısıyla
bu problemin analizi hayli karmaşıktır dolayısıyla basitleştirmelere ihtiyaç gösterir. Bu konuda değişik
metotlar geliştirilmiş ve hazır formülasyonlar kullanıma açılmıştır [11, 15, 16]. Literatürde bu problemin
çözümüne farklı yaklaşımlar da bulunmakla beraber bu farklı hesaplamalar üzerinde burada
durulmayacaktır. Burada toprak dönüş yolunun hat parametrelerine etkisine yönelik olarak Carson [17]
ve Rudenberg’in [18] bulgularına dayalı normal toprak direnci sınırları arasında (50-500Ω-m), güç
frekansında (50 veya 60Hz) ve normal havai hat konfigurasyonları için geçerli basitleştirilmiş
yaklaşımlar kullanılacaktır. Diğer yaklaşımların geniş bir özeti ve mukayesesi literatürde [13, 16]
bulunabilir
Unutulmamalıdır ki toprağın etkisini dikkate alan hesaplama ve formülasyonlar sadece toprağın dönüş
yolu olarak kullanıldığı durumlarda yani bir toprak arızası durumunda hattın endüktansını etkileyecektir
(sıfır sıra endüktansı). İlerde simetrili bileşenler ve dengesiz arızalar incelenirken bu konu yeniden
gündeme gelecektir.
İlk olarak basit bir hat düzenlemesi ele alalım, tek fazlı tek bir iletken Şekil 14 de gösterildiği gibi toprak
üzerinde asılı olsun. Bu iletkenin uzak bir noktada topraklandığı ve taşıdığı I akımının tamamının toprak
İletken
İletken
I
D
Toprak
İletkenin yansıması
D
Toprak
İletkenin yansıması
I
Ön görünüş
Yan görünüş
üzerinden döndüğü kabul edelim.
Şekil 14 Toprak üzerinde asılı tek iletken.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
26
Bu dönüşün tek ve bizim iletkenimizin yansımasından oluşan bir hayali iletken üzerinden yapıldığı
kabul edilerek Carson [17] tarafından yapılan hesaplamalar sonucunda bir sonsuz seri verilmiştir. Bu
sonsuz serinin çözümü yardımıyla toprak üzerinden geri dönen akım de yarıçapına sahip ve De derinliğe
gömülmüş hayali bir geri dönüş iletkeninden devresini tamamladığı gösterilmektedir. Bu kabullere
uygun olarak ve durumu Şekil 14 de iletkenin yansıması şeklinde gösterilen hayali iletkenin yarıçapı ve
derinliği hesaplanabilmektedir. Hesaplamada kolaylık olması bakımından derinlik veya yarıçap rasgele
kabul edilmekte ve buna bağlı olarak diğer büyüklük hesaplanmaktadır.
Bu hayali iletkenin derinliği De ise yine benzer şekilde hesaplanmaktadır. Carson’un hesaplamaları
sonucunda hayali iletkenin derinliği toprak öz-direnci ve frekansın bir fonksiyonu olarak
De=658.8(ρ/f)0.5
. 72
şeklinde verilmiştir. Bu formülde sonuç metre cinsinden çıkmaktadır. Bu derinliğe bağlı olarak
endüktans hesaplamasına esas olacak iletkenler arasındaki D mesafesi yarıçap rasgele seçilerek
belirlenmektedir. Bu durumda yarıçap bir birim (burada metre) seçilirse iletkenler arasındaki mesafe
buna bağlı olarak,
D=(De)0.5
. 73
şeklinde hesaplanabilir. Bu değerler kullanılarak iletkenin veya güç sistemini oluşturan iletkenlerin
endüktansı toprağın ilave bir de yarıçap ve D mesafesinde iletken şeklinde modellenmesi ile daha önceki
bölümlerde açıklandığı gibi hesaplanabilir.
2.1.3 Kapasitans
Hat parametrelerini sıralarken paralel eleman olarak iletkenlik (kondüktans) ve kapasitans zikredilmişti.
Kondüktansın hatlardaki sızıntı akımını temsil etmek için kullanıldığı ve bu akımın çok küçük
değerlerde olması sebebiyle genellikle ihmal edildiği belirtilmişti. İhmalin en önemli sebeplerinden biri
de kondüktansın değişken tabiatı sebebiyle modellenmesinin pek kolay olmamasıdır. Şöyle ki sızıntı
akımının temel kaynağı izolatörlerdir daha doğru bir ifade ile bu izolatörlerin içinde bulunduğu
durumdur. İzolatörlerin sızıntı akımı ise çevre şartlarının etkisi altındadır. Mesela atmosferik olaylar
nem, toz vs. bu akımı dikkate değer bir büyüklükte etkiler. Sızıntı akımın bir diğer sebebi olan korona
olayı yani fazlar arasındaki sızıntı akımı yine çevre şartlarının etkisi altındadır. Sızıntı akımını
modellemekte kullanılan hatların iletkenliğinin etkisi bir çok güç sistemleri çalışması için diğer
parametrelere kıyasla az olduğundan ihmal edilmesi çok büyük hatalara sebep olmamaktadır. Ancak
özellikle yeraltı kablolarının modellenmesinde zaman zaman bu akımlarında modellenmesine ihtiyaç
hissedilmektedir.
Hatların kapasitesi iletkenler ve iletkenler ile toprak arasındaki gerilim farkı sebebiyle tıpkı kondansatör
plakalarının şarj olmasına benzer şekilde şarj olması ile ortaya çıkmaktadır. İletkenler arasındaki
kapasitans hatların geometrisine bağlı olarak genellikle sabittir. Yaklaşık 80km ye kadar olan iletim
hatlarının kapasitesi çok küçük olduğundan genellikle ihmal edilmektedir. Fakat daha uzun hatlarda ve
özellikle yüksek gerilimlerde önemli bir parametre olarak işlev görmektedir.
Alternatif bir gerilimin etkisi altındaki iletim hatlarının yük durumu alternatif gerilimin ani değerine
bağlı olarak değişim gösterir. Bu yükün değişimi neticesinde oluşacak elektriki yük akışı elektrik
akımıdır. Bu akım ‘şarj akımı’ (charging current) olarak isimlendirilir. Bu şarj akımı iletim hattı yüklü
değilken bile akar ve hattın gerilim profilini, verimini, güç katsayısını ve sistemin kararlığını etkiler.
Şarj akımı özellikle topraksız, yüksek empedans veya Peterson Bobini üzerinden topraklı sistemlerde
çok yüksek değerlere ulaşabilir. Dengesiz çalışma durumlarında (özellikle tek faz kısa devresi) ark
doğmasına yol açabilir.
Yeraltı kabloları yapılarından dolayı çok daha fazla kapasitif etki göstermektedirler. Bu tip hatların
gittikçe artan oranlarda güç sistemlerinde kullanılmaya başlanmasıyla hat kapasitansının önemi çok daha
fazla belirginleşmiştir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
27
2.1.3.1 Bir iletkenin çevresindeki elektrik alanı
Endüktans hesabında nasıl manyetik alan temel bir işlev görüyorsa kapasitans hesabında da aynı işlevi
elektrik alanı görmektedir. Elektrik alan çizgileri Şekil 8 de manyetik alan için gösterildiği gibi pozitif
yüklü iletkenden ayılarak negatif yüklü diğer iletkende son bulurlar. Bir iletkenden yayılan elektrik akısı
o iletkenin elektrik yük miktarına (Coulomb) eşittir. Elektrik akı yoğunluğu ise birim alana düşen
elektrik akı miktarı olarak verilmektedir.
Düzgün ve doğrusal çok uzun bir iletken uniform ve dış etkilerden uzak bir ortamda yer alıyorsa
uzunluğu boyunca düzgün dağılmış uniform bir yüke sahip olacaktır. Yine bu iletkenden eşit uzaklıktaki
her noktanın potansiyeli birbirine eşit (eş-potensiyel, equi-potential) olacaktır. Dolayısıyla bu noktalar
eşit elektrik akı yoğunluğuna sahiptirler. Şekil 15 de bu vasıflara haiz bir iletkenin durumu ve iletkenin
merkezinden x kadar uzaklıktaki elektrik alanı gösterilmektedir.
x
q
Şekil 15 İzole edilmiş pozitif yüklü bir iletkenin çevresindeki elektrik alanları.
Bu elektrik alanının yoğunluğu x çapında silindirik bir yüzey düşünülerek hesaplanabilecektir.
İletkenden eşit uzaklıktaki bütün yüzeylerin eş-potansiyele sahip olduğu durumda buradaki elektrik akı
yoğunluğunun eşit olacağı açıktır. Bu durumda iletkenden ayrılan elektrik akısının miktarı bu iletkenin
yük miktarına (q) eşit ise elektrik akı yoğunluğu,
D=q/(2πx)
. 74
yazılabilir. Elektirik akı yoğunluğu ortam permitivitisine (di-elektrik sabiti) (ε)i bölünürse elektrik alan
şiddeti (E) şiddeti hesaplanabilir.
Ε=q/(2πxε)
. 75
Elektrik alan şiddetinin birimi V/m dir.
Hatların kapasitesinin hesabına geçmeden önce incelenmesi gereken önemli bir konu da iki nokta
arasında elektrik yükü sebebiyle oluşacak potansiyel farktır. İki nokta arasındaki volt cinsinden
potansiyel fark sayısal olarak bir Coulomb’luk yükü birinci noktadan ikinci noktaya kadar taşımak için
gerekli olan kuvvete eşittir. Yine elektrik alan şiddeti alandaki elektrik yükünün kuvvetinin ölçüsüdür.
Dolayısıyla metre başına volt olarak verilen elektrik alan şiddeti bakılan noktadaki Coulomb başına
newton cinsinden elektrik yükünün kuvvetidir de. Bu bilgiler kullanıldığı takdirde iki nokta arsındaki
potansiyel fark bir yükü çizgisel bir yol boyunca bu noktalar arasında taşımak için gerekli olan kuvvete
sayısal olarak eşitlenecektir.
i
SI birim sistemiinde boşluğun di-elektrik sabiti ε0=8.85.10-12F/m olarak verilmiştir. Havanın bağıl dielektrik sabiti yaklaşık olarak 1 alınarak bu değer burdaki hesaplamalarda kullanılacaktır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
28
Şekil 16 da verilen durumu inceleyelim. P1 ve P2 noktaları pozitif yüklü bir iletkenden D1 ve D2
mesafelerinde yer almış olsun. Bu noktalar arasındaki potansiyel farkı hesaplamanın en pratik yolu
elektrik alan şiddetini bu iki nokta arasında entegre etmektir.
İntegralin
Yolu
+q
D1
P1
D2
P2
Şekil 16 Silindirik bir iletkenin dışında yer alan iki noktanın durumu.
Şayet elektrik yükünün ani değeri q ile gösterilecek olursa bu iki nokta arasındaki potansiyel farkın ani
değeri v,
D2
D2
D1
D1
v12 = ∫ E.dx =
q
q
D2
∫ 2πεx .dx = 2πε ln D
1
. 76
olur. Denklem . 76 de verilen v12 değeri seçilen noktaların durumuna ve elektrik yükünün işaretine bağlı
olarak negatif veya pozitif olabilir.
2.1.3.2 İki iletkenli hatların kapasitansı
Kapasitansın tanımını hatırlayacak olursak, iki iletken arasındaki kapasitans bu iki iletkenin potansiyel
farkı başına elektrik yükü olarak tanımlanmaktadır. Bu tanım şu şekilde formüle edilebilir.
C=q/v
. 77
İki iletken arasındaki kapasitans . 76 i . 77 da yerine koyarak rahatlıkla hesaplanabilecektir. Aralarında D
mesafesi bulunan ra ve rb yarıçaplı iki iletkenin durumunu inceleyelim. Şayet iki iletkenin oluşturduğu
elektrik alanları birbirlerini etkilemiyor ve bozmuyorsa süper-pozisyon teoremi kullanılarak potansiyel
fark hesaplanabilir. Bu yaklaşım D mesafesinin yarıçaplara nazaran çok büyük olması durumunda
önemli hatalara sebep olmaksızın kullanılabilir. Fakat iletkenlerin birbirine hayli yakın olduğu
durumlarda mesela kablolar için bu varsayım önemli hatalara yol açacaktır.
İki iletken arasındaki potansiyel fark önce birinci iletkenin yükü sebebiyle birincide ve ikinci iletkenin
yükü sebebiyle ikincide meydana gerilim düşümlerinin süper-pozisyon prensibinden hareketle
toplanmasıyla bulunabilir. Bu durumda . 76 de verilen bağıntıyı kullanarak ve her bir iletken için D2
mesafesinin o iletkenin yarıçapı olduğunu kabul edersek,
v ab =
qa
r
D q
ln + b ln b
2πε ra 2πε D
. 78
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
29
olur. Tek fazlı iki telli hatlar için elektrik yükleri birbirine eşit ve zıt işaretli ise ve logaritmik terimler
uygun biçimde birleştirilirse,
v ab =
qa
D2
ln
2πε ra rb
. 79
bulunur. Bu durumda iletken yarıçaplarının birbirine eşit olduğu kabulüyle kapasitans,
C ab =
qa
πε
=
Vab ln( D / r )
. 80
şeklinde yazılır. Ancak yukarda da belirtildiği gibi bu formülasyon bir iletkenin elektrik yük dağılımının
diğer iletkenin varlığı ile değişmediği kabulüne dayalıdır. Bu varsayımın yol açabileceği hata
hesaplanabilir bir karakterdedir ve iletkenler arasındaki mesafeye bağlıdır [11]. Şekil 17 de bu varsayım
sebebiyle oluşacak olan hatanın miktarı çeşitli D mesafeleri için verilmiştir.
0
0,03
0,05
0,1
0,2
0,3
1
Hata (%)
-0,08
-0,16
-0,24
-0,32
İletkenler arasındaki mesafe (m)
Şekil 17 2.54cm çapındaki bir iletkenin kapasite hesaplamasında düzgün yük dağılımı kabülü
sebebiyle olabilecek hata [11].
Grafikten de açıkça görüleceği gibi iletkenler birbirine yakınlaştıkça varsayımdan dolayı oluşacak hata
miktarı çok önemli ölçüde artmaktadır. Fakat bu varsayımın iletkenler arasındaki mesafenin çok büyük
olduğu havai hatlarda önemli bir hataya sebep olmayacağı söylenebilir. Bu sebeple bundan sonraki
hesaplamalarda bu varsayım kullanılmaya devam edilecektir.
Burada dikkatle üzerinde durulması gereken nokta . 80 da verilen kapasitans formülünde yarıçap
endüktans formüllerinde olduğu gibi GMR değil gerçek-ölçülen değerdir. Yine bu formül solid iletken
için çıkartıldığına göre büklümlü iletkenler için de aynı formülün kullanılması hatalara sebep
olabilecektir. Ancak bu hata sadece iletkenin dışına yakın kısımlardaki elekrik alanında bir bozulmaya
sebep olacağından çok küçüktür ve ihmal edilmesi yine özellikle havai hatlar için büyük hatalara sebep
olmaz. Dolayısıyla büklümlü iletkenler için yapılan hesaplamalarda da ölçülen yarıçapın kullanılması
yeterli olacaktır.
Elektrik güç sistemleri genellikle topraklanmıştır. Dolayısıyla sadece hatlar arasındaki kapasitenin
bilinmesi güç sistemi çalışmaları için genelde yeterli değildir. Hat ile toprak veya nötür noktası
arasındaki kapasite de bazı çalışmalar için elzemdir. Toprağa veya nötür noktasına olan kapasitans bu
iletken ile toprak arsındaki potansiyel fark ile yüke bağlıdır. Dolayısıyla iki telli hatlar için toprağa olan
kapasitans hatlar arasındaki kapasitansın iki katıdır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
30
2.1.3.3 Üç fazlı hatların kapasitansı
İlk olarak üç eşit yarıçapa sahip ve birbiriyle eşit uzaklıkta bulunan üç iletkenin durumuna bakalım
iletkenlerin Şekil 12 de gösterildiği gibi bir eşkenar üçgenin kenarlarında yer aldıklarını düşünelim.
İletkenlerin uniform yük dağılımına sahip olduğu düşünülecek olursa iki tel için geliştirilen . 78 üçüncü
iletkeni de içerecek biçimde yeniden yazılabilir. Üçüncü iletken için merkezdeki tek yük ele alınırsa,
v ab =
qa
ln
2πε
q
D qb
r
D
+
ln + c ln
r 2πε D 2πε D
. 81
olur. Dikkat edilecek olursa üçüncü terim sıfırdır ve bir etkisi yoktur. Bu terim buraya her üç iletkende
incelendiği için dahil edilmiştir. Benzer şekilde,
v ac =
qa
2πε
ln
D qb
D q
r
+
ln + c ln
r 2πε D 2πε D
. 82
yazılabilir. Elektrik yükünün düzgün sinüs dalgası şeklinde değiştiği kabul edilerek yük ve potansiyel
fark için fazör gösterim kullanılırsa iki gerilimin toplamı,
V ab + Vbc =
1
D
r
2q a ln + ( q b + q c ) ln
2πε
r
D
. 83
olur. Üç iletkendeki yüklerin toplamı çevrede başka bir yük olmadığı için sıfırdır bu durumda qb+qc için
-qa yazılabilir.
Vab + Vbc =
3q a D
ln
2πε
r
. 84
Üç fazlı hatlarda bilinmektedir ki,
Vab+ Vac =3Van
. 85
bu durumda nötür ve faz arasındaki potansiyel fark,
Van =
qa
D
ln
2πε r
. 86
olur buradan kapasite,
Cn =
2πε
ln( D / r )
. 87
bulunur.
Eşit aralıklı olarak yerleştirilmemiş üç fazlı ve transpoze edilmemiş hatlarda her bir faz iletkeninin
toprağa olan kapasitansı diğerinden farklı olacaktır. Fakat transpoze edilmiş hatlarda fazlar arasındaki
toprağa olan kapasitans değerleri arasındaki fark önemsiz düzeydedir. Genelde transpoze edilmemiş
hatlar eşit aralıklı veya buna yakın bir biçimde düzenlenmiştirler. Dolayısıyla bir önceki hesaplama
bunlar için gereklidir. Burada hesaplama transpoze edilmiş hatlar için yapılacaktır. Şekil 18 de bu tarzda
düzenlenmiş hattın durumu görülmektedir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
31
Faz b
Dab
Dbc
Faz a
Faz c
Dac
Şekil 18 Eşit aralıklı yerleştirilmemiş üç fazlı hat.
Yukarıdaki şekil incelenecek olursa Vab için hattın Şekil 13 deki gibi transpose edildiği düşünülerek her
üç değişik transpozisyon durumu için, üç değişik formülasyon yazılabilir.
V ab =
V ab =
V ab =
qa
2πε
qa
2πε
qa
2πε
ln
ln
ln
D ab
r
Dbc
r
D ac
r
+
+
+
qb
2πε
qb
2πε
qb
2πε
ln
q
D
r
+ c ln bc
D ab 2πε
D ac
ln
q
D
r
+ c ln ac
D bc 2πε
D bc
ln
q
D
r
+ c ln ab
D ac 2πε
Dbc
. 88
Bu formüller dikkat edilecek olursa . 68 de endüktans için verilen halkalanma akısı formüllerine
benzemektedir. Ancak bu formüllerde faz iletkenlerinden akan akımların toplamı sıfır idi. Burada da
benzer şekilde birim uzunluk başına elektrik yükünün iletkenin her tarafında aynı olduğu kabul edilecek
olursai her hangi bir iletken çifti arasındaki potansiyel fark her bir tronspozisyon periyodu için farklı
değerde olacaktır. Bu sebeple her bir periyot için hesaplanan değerin toplanarak üçe bölünmesi ile
ortalama potansiyel fark hesaplanabilecektir. Bu yapılacak olur ve gerekli logaritmik düzenlemeler
uygulanırsa,
V ab =
D ab D bc D ac
D ab D bc D ac
1
r3
+
+
q
ln
q
ln
q
ln
a
b
c
6πε
D ab D bc D ac
D ab D bc D ac
r3
. 89
bulunur. Benzer tarzda potansiyel fark a ve c iletkenleri için de yazılabilir. İletkenler arasındaki mesafe
için GMD veya Deq terimi kullanılacak olursa,
Vac =
Deq
1
r
+ qc ln
qa ln
2πε
r
Deq
. 90
Faz toprak arasındaki kapasitans için eşit aralıklı hatlarda yapıldığı gibi bu iki değer toplanarak üçe
bölünür,
V an =
1
2πε
q a ln
D eq
r
. 91
ve kapasite,
i
Şurası açıktır ki bu varsayım hakiki durumda geçerli değildir. Ancak aksi bir kabul ile yapılacak
hesaplama kullanım bakımından pratik olmayacaktır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
32
Cn =
2πε
ln( Deq / r )
. 92
olur.
2.1.3.4 Toprağın etkisi
Endüktansta da görüldüğü gibi iletim hattının üzerinden geçtiği toprak iletkenlerin kapasitansını etkiler.
Zira havaya göre daha iletken bir ortam olan toprağın varlığı hatların çevresindeki elektrik alanlarının
durumunu değiştirir bu değişim hattın kapasitansını etkileyecektir. Bunu daha iyi anlayabilmek için
iletkenlerin üzerinde asılı bulunduğu toprağı düz, iletken ve sonsuz boyutlarda bir ortam olarak
düşünelim. Bu durumda iletkenlerin etrafında olması gereken elektrik alanı büyük ölçüde değişime
uğrayacaktır. Elbette toprak tam anlamıyla düz değildir ve iletkenliğinin de mükemmel olduğu
söylenemez. Ancak bu örnek bize toprağın iletkenler etrafındaki elektrik alanını nasıl değiştirebileceğini
ve bunun dolayısıyla hattın kapasitansını etkileyeceğini anlatmak bakımından faydalıdır.
Şayet toprak üzerinde asılmış ve dönüş yolu toprak üzerinden olan tek bir iletken düşünülecek olursa, bu
iletkenin yükü toprakla iletken arasındaki potansiyel farktan ve topraktaki elektrik yükünden
kaynaklanacaktır. Toprağın elektrik yükünün iletkenini elektriki yüküne eşit fakat ters işaretli olduğu
söylenebilir. Toprak iyi bir iletken kabul edilecek olursa iletken üzerindeki yük ile toprağın yükünün
meydana getirdiği akı toprağın eş potansiyel yüzeylerine diktir. Şimdi yine endüktans hesabında
yapıldığı gibi hayali iletkenler düşünelim. Bu iletkenler toprak üzerindeki gerçek iletkenler ile aynı
büyüklükte ve onların toprak yüzeyinden mesafesi kadar derine gömülmüş olsun. Bu ortamdan toprağı
kaldırırsak ve ortamın belirli ve sabit bir di-elektrik katsayısına sahip olduğu kabul edilecek olursa
hayali ve gerçek iletkenlerin tam ortasında bir eş potansiyelli yüzey oluştuğu düşünülebilir. Bu yüzey
toprağın mevcudiyeti durumunda oluşacak eş potansiyel yüzeyle aynı özelliklere sahip olacaktır,
dolayısıyla hayali iletkenler toprağın işlevini üstlenmiş olacaktır.
Şekil 19 da hayali ve gerçek iletkenlerin durumu transpose edilmiş, üç fazlı bir havai hat için ilk
transpozisyon periyodu için sunulmuştur. Her bir faz iletkeninin yükleri a, b, c alt-yazımları ile ve hayali
iletkenlerin yükleri gerçek yüklerin ters işareti ile gösterilmiş olsun. İletkenler arasındaki mesafe D harfi
ve uygun alt yazımlarla, gerçek iletkenlerle hayali iletkenler arasındaki mesafe de H harfinin uygun alt
yazımlarla kullanılması ile gösterilsin.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
33
qa
D12
qb
D23
qc
D13
H13
H12
H23
H1
H2
H3
Toprak
H32
H31
H21
-qc
-qb
-qa
Şekil 19 Üç fazlı hatların toprak üzerindeki durumu ve iletkenlerin yansıması.
Tronspozisyonun her bir periyodu için potansiyel fark bundan önceki bölümde izah edildiği şekilde
yazılabilir. İlk periyot için a ve b iletkenleri arasındaki potansiyel fark,
V ab =
H2
H 12
1 D 12
r
+ q b ln
− ln
ln
−
q a ln
D
2πε
r
H 1
H 12
12
H
D
+ q c ln 23 − ln 23
D
H 31
31
. 93
şeklinde yazılır. Benzer denklemler diğer periyotlar içinde yazılabilir. İletkeninin uzunluğu boyunca eşit
yüke sahip olduğu varsayılacak olursa tüm hat boyunca ortalama bir potansiyel fark hesaplanabilecektir.
Daha önce yapıldığı gibi . 85 kullanılarak toprağa olan potansiyel ve takiben faz toprak arasındaki
kapasitans,
Cn =
(
2πε
ln( D eq / r ) − ln 3 H 12 H 23 H 31 / 3 H 1 H 2 H 3
)
. 94
şeklinde bulunur. Yukarıdaki denklem toprağın etkisini dikkate almadan hesaplanan ve . 92 de verilen
denklemle kıyaslanacak olursa, toprağın etkisinin küp köklü terimle gösterildiği anlaşılacaktır. Bu terim
toprak düzeltme terimi olarak isimlendirilmektedir. Şayet havai hatların genel yapısı göz önüne alınacak
olunursa bu düzeltme teriminin çok küçük olacağı görülecektir. Çünkü iletkenler yerden çok yüksekte
inşa edildikleri için çapraz yükseklik (Hjk) ile normal yükseklikler (Hj) birbirine çok yakın olup
logaritmik terim sıfıra yakınsar. Dolayısıyla bu tarz inşa edilen hatlar için dengeli işleme durumunda
toprağın etkisi ihmal edilebilmekte ve . 92 hat kapasitesinin belirlenmesi için kafi olmaktadır. Ancak
dengesiz işleme şartlarında (mesela toprak arızası) toprağın etkisi sistemden akan akımların dengesiz
olması sebebiyle büyük önem arz edecektir. Dengesizlik durumunun oluşturacağı bu etki simetrili
bileşenler konusunda tekrar incelenecektir.
2.2
Transformatörler
Elektrik güç sistemlerinin önemli bir başka elemanı da transformatörlerdir. Transformatörler çok çeşitli
güç ve gerilim seviyelerinde üretilerek güç sistemlerinde kullanılmaktadırlar. Bir transformatör genelde
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
34
ortak bir manyetik akı ile halkalanan birden fazla sargıdan oluşan basit cihazlardır. Güç sistemlerinde
kullanılan transformatörlerin manyetik devreleri ki çekirdek veya nüve olarak adlandırılmaktadırlar
genelde demir temelli bir manyetik malzemeden yapılmıştır. Sargıların seri veya paralel olarak bir araya
getirilmesi ile transformatörlerin sarım düzenleri gerçekleştirilebilirler. Transformatörlerle alakalı teori
çok iyi yerleşmiştir ve çok sayıda yayın mevcuttur [19, 20]
Şekil 20 de tek fazlı bir transformatörün sargılarının yerleştiriliş şekli gösterilmektedir. Her bir sargıdaki
sarım sayısı çok farklı değerlerde olabilir. Yine çekirdek tipleri çok farklı olarak düzenlenmiş
transformatörlerle karşılaşmak mümkündür.
φ, Akı
I2
I1
U1
N1
N2
U2
Şekil 20 İki sargılı tek fazlı bir transformatör.
Güç sistemleri için transformatörlerin sağlıklı bir şekilde modellenmesi yapılan çalışmaların hassasiyeti
ve ihtiyaçlarına bağlı olarak yapılmaktadır. Genelde kullanılan transformatör modellerini ve bunların
görsel hale getirilmiş eşdeğer devrelerini dört değişik gurup altında toplamak mümkündür. Karmaşıklık
sırasına göre bunlar şu şekilde sıralanabilirler.
•
T eşdeğer devre,
•
L eşdeğer devre,
•
Π eşdeğer devre,
•
en basit eşdeğer devre.
Bu eşdeğer devrelerin alt gurupları ile de karşılaşmak mümkündür. Her bir modelin ve buna bağlı olarak
eşdeğer devrenin transformatörün elektriksel özelliklerini yapılan güç sistemi çalışmalarına katmakta
gösterdiği avantajlı ve dezavantajlı özellikleri vardır. Yapılacak çalışmanın özelliğine göre
transformatörler bu modellerden bazıları kullanılarak güç sistemleri hesaplarına dahil edilirler.
Bu modellerin analizine geçmeden önce transformatörün temel yapı ve fonksiyonunu anlamak için bir
basitleştirme ile ‘ideal transformatör’le başlayacağız.
2.2.1 İdeal Transformatör
i
i2
İdeal transformatör, gerçek 1transformatörün basitleştirilmiş şeklidir.
Yani kayıplarının ihmal edildiği, akı
N1/N2
değişiminin tam sinüs biçimli olduğu, manyetik
devrenin geçirgenliğinin sonsuz, elektrik devresinin
direncinin sıfır olduğu bir hayali alettir. Şekil 20 de verilen transformatörün şematik gösterimi Şekil 21
de sunulmuştur. Noktalar manyetik bağlantıyı göstermek amacıyla kullanılmaktadır.
u2
u1
Şekil 21 Trans formatörün şematik gösterimi
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
35
Bu varsayımlar ışığında Şekil 21 de verilen transformatör incelenecek olursa Faraday kanuna uygun
olarak her bir sargıda endüklenen gerilimlerin ani değeri, e, ki bu aynı zamanda kayıplar ihmal edildiği
için terminal uçlarındaki gerilimdir,u,
u1=e1=N1dФ/dt ani
u2=e2=N2dФ/dt
. 95
şeklinde yazılabilir. Burada N1 ve N2 her bir sargının sarım sayısı ve Ф de her iki sargıyı halkalayan
akının ani değeridir. Yukarda verilen iki denklemi birbirine oranlarsak ve akının değişimi sinüs biçimli
olduğundan fazör gösterimi kullanırsak transformatör dönüştürme oranı a,
a=
U 1 E1 N 1
=
=
U 2 E2 N 2
. 96
bulunur. Bir transformatörden akan akımlar arasındaki bağıntı ise Amper kanunu kullanılarak kaplı bir
hat üzerindeki akının meydana getireceği toplam amper-sarım (mmk) kullanılarak yazılabilir.
∫ H ds=N1i1- N2i2
. 97
Buradan akı yoğunluğunun bu kapalı hat boyunca entegrali sıfır olduğundan, yukarıdaki ifade fazör
olarak yeniden düzenlenirse,
a=I2/I1=N1/N2
. 98
yazabiliriz. Genel olarak transformatörlerin beslendiği tarafa birincil (primer, primary), yüklendiği taraf
ise ikincil (sekonder, secondary) taraf denilmektedir. Fakat unutulmamalıdır ki transformatörlerin
besleme tarafı değişebilir dolayısıyla bu şekilde isimlendirme zaman zaman yanlış anlaşılmalara sebep
olabilmektedir. Bununla beraber pratik olarak bu isimlendirme kullanıldığı için burada da bu yol takip
edilecektir.
Şayet transformatörün ikincil tarafı herhangi bir empedans ile yüklenecek olursa transformatör bu
empedansı diğer taraf ile uyumlulaştırma işlevini görecektir. İkincil tarafa bağlanan empedans,
Z2=U2/I2
. 99
şeklinde hesaplanabilir. Gerilim ve akım birinci tarafa göre yazılacak olursa,
Z2=(N2/N1)U1/(N1/N2)I1
. 100
i
olur. Kayıplar ihmal edildiği için bu empedans birinci tarafa indirgenmiş/yükseltgenmiş empedans
olarak anılmaktadır, bu tarz indirgenmiş/yükseltgenmiş büyüklükler üzerlerine konan bir işaretle
gösterilecektir. Yukarıdaki denklem yeniden yazılacak olursa
Z’2=a2Z2
. 101
şekline gelir. Bir ideal transformatörde kayıplar ve gerilim düşümleri ihmal edildiği için birinci tarafın
volt-amper değeri ile ikinci tarafın volt-amper değerleri birbirlerine eşittir. Bu durumda kompleks güç,
i
Bu terimler transformatörün bir tarafına ait olan büyüklüklerin diğer tarafa göre yazılması manasında
dönüşümlü olarak kullanılabilecektir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
36
S1=S2=U1I*1= U2I*2
. 102
şeklinde verilir.
2.2.2 Transformatörün Eşdeğer Devreleri
İdeal transformatör gerçek transformatörün çalışma prensibini anlamakta iyi bir araç olmakla birlikte
transformatörün en önemli özelliklerini barındırmaz. Bunlar şu şekilde sıralanabilir; manyetik devrenin
geçirgenliği sonsuz değildir, sargıların direnci (bakır kayıpları) vardır, akının zamana bağlı değişiminden
dolayı manyetik devrede kayıplar (demir kayıpları) oluşur ve birincil sargıda oluşan akının tamamı
ikincil sargıyı halkalamaz (kaçak akı).
İkinci tarafı açık tutulan bir transformatörün birinci tarafına sinüs biçimli değişen alternatif bir gerilim
uygulanacak olursa bu sargıdan küçük bir akım akar. Bu akım mıknatıslama akımı olarak
adlandırılmaktadır. Bu akım transformatörün temel bir kaybı olan boş çalışma kayıplarına sebep
olmaktadır. Bu akımın yol açtığı kayıplar iki ana başlık altında incelenmektedir. Birincisi manyetik
akıdaki değişim nedeniyle transformatörün manyetik gövdesinde ısıya dönüşmekte ve bu kayıp histerisiz
kayıpları olarak isimlendirilmektedir. Diğeri ise demir gövde de oluşan fuko akımları (eddy-current)
sebebi ile oluşan kayıplardır.
Her iki kayıp da çeşitli metotlar kullanarak azaltılabilmektedir. Mesela yüksek geçirgenliğe sahip
yönlendirilmiş kristalli çelik malzemeden yapılan demir gövde histerisiz kayıplarını azaltırken,
dilimlenmiş ve birbirlerinden elektriki olarak yalıtılmış sacların preslenerek bir araya getirilmesiyle imal
edilen çekirdek fuko kayıplarını azaltmaktadır. Bu boş çalışma kayıplarını modelleyebilmek için ideal
transformatörün beslendiği birinci tarafa paralel elemanlar yerleştirilir. Aktif (Watlı) kayıpları
gösterebilmek için bir rezistans ve genellikle enduktif bir karaktere sahip olan ve 90 dereceye yakın bir
açıya sahip olan boş çalışma akımının reaktif bileşenini gösterebilmek için de bir paralel endüktans
kullanılır.
İlave bir başka kayıp ise transformatör sargılarından akan akıma ve bu sargıların direncine bağlı olarak
oluşan (I2R) kayıplardır. Bu kayıplar bakır kayıpları olarak isimlendirilirler. Transformatör sargılarının
DA direnci bu kayıpları hesaplayabilmek için yeterli olmadığı için, bu kayıplar ancak özel bir deney
olan kısa devre deneyi ile belirlenebilirler. Bakır kayıpları yük altında tezahür ettikleri için kısa devre
deneyinin anma akımında yapılması transformatörün anma kayıplarını ve dolayısıyla anma değerleri için
eşdeğer devrenin seri elemanlarının hesaplanmasına imkan verir.
Kısa devre deneyi esnasında transformatöre uygulanan gerilim çok küçük olduğundan eşdeğer devrenin
paralel elemanlarından akan akımın miktarı çok küçüktür. Dolayısıyla bu esnada oluşan kayıpların
tamamının sargı dirençlerinde harcandığı söylenebilir. Bu kayıplar transformatörün deneyin yapıldığı
taraftan görülecek olan toplam empedansı ve AA direncini hesaplamakta kullanılırlar.
İdeal transformatörden farklı olarak gerçek transformatörlerin birincil sargısında üretilen akının tamamı
ikincil sargıyı halkalamazlar. Bu akının bir kısmı başka yollar üzerinden (mesela hava) devresini
tamamlayabilir. Bu şekilde ikincil sargıyı halkalamayan akıya kacak akı bu akının oluşturduğu reaktansa
da kaçak reaktans adı verilir. Bu reaktans da eşdeğer devrenin seri elemanlarından reaktif olanını temsil
eder.
Özetlenecek olursa gerçek bir transformatörün ideal transformatöre ilave olarak boş çalışma kayıplarını
temsil etmek için besleme tarafına yerleştirilen paralel bir endüktans (Xm) ve direnç (Rm), kısa devre
deneyi ile bulunan, bakır kayıplarını temsil eden seri bir direnç ve kaçak akıyı temsil eden bir reaktans
bulunmaktadır. Bu seri elemanlar transformatörün birinci ve ikinci sargıları arasında paylaştırılmalıdır
(R1, R2, X1, X2). Bu şekilde düzenlenmiş bir eşdeğer devre Şekil 22 sunulmuştur.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
37
R1
X1
X2
R2
I
0
I1
I2
I.T.
U2
E2
Xm
E1
U1
Rm
Şekil 22 İdeal Transformatörlü eşdeğer devre.
Dönüştürme oranını kullanarak ikinci taraf büyüklükleri birinci tarafa aşağıda gösterildiği gibi
yükseltgenecek olursa iki taraf arasında yer alan hayali eleman ideal transformatör (I. T.) kaldırılabilir.
E′2=aE2
I′2=I2/a
X′2=a2X2
R′2=a2R2
U′2=aU2
. 103
Yükseltgenmiş elemanları normal elemanlardan ayırt edebilmek için (′) sembolü kullanılırsa eşdeğer
devre Şekil 23 de gösterilen duruma gelir.
R1
X1
X'2
I0
I1
U'2
Xm
I'2
E'2
E1
U1
Rm
R'2
Şekil 23 T eşdeğ er devre.
Küçük bir hata göz önüne alınarak paralel elemanlar eşdeğer devrenin bir tarafına toplanabilirler bu
durumda oluşan L biçimindeki devre transformatörü yaklaşıklıkla temsil eder. Paralel elemanlardan
Resistif özellikte olan Rm normalde çok büyük olduğundan ihmal edilebilir ve eşdeğer devre bir paralel
elemana (Xm) sahip hale gelir. Bu paralel elemanın ikiye bölünerek devrenin her iki tarafına
yerleştirilmesi ile Π eşdeğer devre elde edilir. Paralel elemanların tamamının ihmal edilmesi ile
transformatörün en basit eşdeğer devresi elde edilir. Bu eşdeğer devre sadece bir empedanstan ibarettir.
Güç sisteminin genel durumu ile alakalı çabuk bir fikir edinmek amacıyla yapılacak kısa devre
hesaplamalarında veya yük akışı çalışmalarında bu empedansın sadece reaktif elemanı göz önüne
alınarak hesaplamalar yapılabilmektedir.
Transformatörün eşdeğer devresini belirleyebilmek için iki tip deneyinin yapılması gerekmektedir bunlar
açık ve kısa devre deneyleridir. Açık devre deneyinde transformatör bir taraftan beslenirken ikinci taraf
uçları açık bırakılır ve makine anma geriliminde beslenir. Bu anda transformatörden herhangi bir güç
çekilmediği için transformatör şebekeden sadece boş çalışma kayıplarını karşılayacak kadar bir akım
çeker. Bu akımın aktif bileşeninin Rm, reaktif bileşeninin ise Xm üzerinden aktığı düşünülerek bu
değerler hesaplanabilir.
Kısa devre deneyinde ise, sargılardan biri kısa devre edilerek diğer tarafa anma akımının geçmesini
sağlayacak bir gerilim tatbik edilir. Deney gerilimi genellikle anma geriliminin yüzde birkaçı
mertebesinde bir genliğe sahiptir. Bu sebeple paralel elemanlar üzerinden akan akım ihmal edilecek
düzeyde olduğundan akımın tamamın seri elemanlar üzerinden aktığı kabul edilebilir. Dolayısıyla, bu
deneyde ölçülen büyüklükler kullanılarak eşdeğer devrenin seri elemanları belirlenir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
38
Özetle, transformatörlerin eşdeğer devreleri daha önce de belirtildiği gibi dört ana başlık altında
toplanabilir. Tablo 1 de bu devreler ve kullanım yerleri sunulmuştur.
Tablo 1 Transformatör eşdeğer devreleri.
Eşdeğer devre
Kullanım yeri
Açıklamalar
T
Dinamik modeller
Gerçeğe en yakın eşdeğer devredir
L
Dinamik modeller/yük akışı hesapları Genellikle paralel büyüklükler başa alınır
Π
Yük akış/bazı kısa devre çalışmaları
Paralel resistans genellikle ihmal edilir
En basit
Kısa devre/yük akış hesapları
Resistif eleman ihmal edilebilir
Güç sistemleri çalışmalarında en yaygın olarak Π eşdeğer devreyi kullanılmaktadır. Bu eş değer devre
ve buna ait model küçük değişikliklerle farklı transformatör tiplerini de göstermek için kullanılmaktadır.
Şekil 24 de bu eşdeğer devre sunulmuştur. Aşağıdaki gösterimde yükseltegenmiş büyüklükleri niteleyen
(′) işareti kolaylık sağlamak amacıyla düşürülmüştür.
I1
Y12
U1
I2
Y1
Y2
U2
Şekil 24 Π eş değer devre.
Şekil 24 de sunulan eşdeğer devrenin elemanları açık ve kısa devre deneyleri ile bulunabilir. Açık devre
deneyinde hesaplanan empedans Z0, admitans Y0, kısa devre empedansı ise Zk ve admitansı Yk ile
gösterilecek olursa yukarda verilen devrenin elemanları büyük bir yaklaşıklıkla admitanslar cinsinden;
Y12=Yk-Y0/2
Y1=Y2= Y0/2
. 104
şeklinde yazılabilir. Bu devreye ait elektriksel bağıntılar ise aşağıda verilmiştir.
I 1 Y1 + Y12
I = − Y
12
2
− Y12 U 1
Y1 + Y12 U 2
. 105
. 104 de verilen değerler . 105 de yerine yazılacak olursa,
Yk
− Yk + Y0 / 2 U 1
I1
I = − Y + Y / 2
U
Yk
0
2
2 k
. 106
bulunur. Bu gösterim sadece tek fazlı transformatörlerin gösteriminde veya üç fazlı transformatörlerin
tek fazlı modellenmesinde kullanılabilir. Paralel kol ihmal edilerek en basit eşdeğer devreye kolayca
geçiş sağlanabilir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
39
2.2.3 Özel Transformatörler
Elektrik güç sistemlerinde farklı yapıda ve özelliklerde transformatörler yaygın olarak kullanılmaktadır.
Bu tip transformatörler hakkında geniş bilgi için referans [20] e bakınız. Burada bu transformatör tipleri
ve modelleri hakkında genel bir bilgi verilecek ve bunların güç sistemleri içindeki kullanım alanlarından
bahsedilecektir.
2.2.3.1 Üç fazlı transformatörler
Birbirinin aynı özelliklere sahip tek fazlı transformatörlerin bir tarafa ait sargılarının faz gerilimi
değerinde çalışacak şekilde bağlantılandırılması ile bir tarafı üçgen (∆) bağlı, diğer tarafa ait sargıların
farklı gerilim değerinde çalışacak şekilde bağlanması ile de yıldız (Y) bağlı taraf edilirler. Bu tarz
bağlanmış üç fazlı transformatörler ∆/Y veya Y/∆ bağlı transformatörler olarak isimlendirilirler. Bu iki
muhtemel bağlantı tarzının dışında iki bağlantı ihtimali daha olduğu açıktır. Bunlar Y/Y ve ∆/∆ bağlı
transformatörlerdir. Şayet tek fazlı transformatör gurupları üç sargılı transformatörlerdeni meydana
gelmişse muhtemel bağlantı şekillerinin sayısı artacaktır. Ancak üçüncül sargı genellikle normal, dengeli
çalışma şartlarında çok büyük bir önem arz etmediğinden yukarda sıralanan temel transformatör bağlantı
tarzlarını anlamak üç fazlı transformatörlerin yapısını anlamada yeterli olacaktır.
I1
aI
U1
U2/a
1
Pratikte, üç fazlı transformatörler üç ayrı tek fazlı transformatör
gurubunun bir araya gelmesi ile değil
aynı demir çekirdek üzerine yerleştirilmiş olarak imal edilirler. Bu tarz yapımın hem maliyeti azaltacağı
hem de tek fazlı üç transformatöre göre daha düşük kaçak akı ve dirence sahip olacağından
transformatörün normal işleme kayıpları ve gerilim düşümü az olacaktır. Ayrıca aynı demir çekirdek
üzerine yerleştirilen üç fazlı transformatörlerin doyma nedeniyle oluşan harmoniklerden bazılarının
bastırılmasını sağlayacak tarzda imal edilmektedirler. Ancak herhangi bir sargı arızası durumunda tek
fazlı transformatörlerden oluşan gurubun modüler karakteri bir avantaj sağlamaktadır. Arıza durumunda
bu karakterdeki transformatörün sadece arızalı olan elemanını değiştirmek mümkün olmaktadır. Şekil
25 de üç fazlı transformatörlere ait çeşitli bağlantı şekilleri gösterilmiştir.
Şekil 25 Üç fazlı transforma tör bağlantı şekilleri.
I1
U1/(a3.5)
U1
I1
aI2
U1/a
U1
i
3.5aI1
Bakınız Bölüm 2.2.3.2
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
40
U 10
U 13
Üç fazlı transformatörlerin Y/∆ veya ∆/Y bağlanması durumunda Y/Y veya ∆/∆ transformatörlerde
karşılaşılmayan bir önemli sorun da bu bağlantı tarzlarının bir faz kaymasına sebep olmasıdır. Bu
sebeple bu transformatörlerin uçları Y/Y ve ∆/∆ transformatörlerde olduğu gibi kolayca işaretlenemez.
Şekil 26 da Y/∆ bağlanmış ve dönüştürme oranı bir (a=1) olan transformatöre ait fazör diyagramı
görülmektedir.
U
12
U 23
10
U
U20
U 20
30
U
U21
U30
32
U
U31
Şekil 26 Y/∆ transform atör gerilimlerine ait fazör diyagramı.
Her ne kadar üçgen bağlı taraf için nötr noktası yoksa da faz-nötr gerilimleri mukayese amacıyla bu taraf
için de gösterilmiştir. Bu fazör diyagramı incelenecek olursa, tek faz nötr arası gerilimlerinde 30° lik bir
faz kayması görülecektir. Her faza ait gerilimler normal işleme şartlarında diğer tarafa göre 30° ileriye
kaymıştır. Bu durumun Y/Y ve ∆/∆ bağlı transformatörlerde olmadığı dikkate alınırsa bu tip bağlı
transformatörler ile Y/∆ bağlı transformatörlerin paralel bağlanması sakıncalar doğuracaktır. Şekil 27 de
British güç sistemine ait transformatör bağlantısı sebebiyle ortaya çıkan faz kayması görülmektedir.
Şekil 27 Transformatör bağlantısı sebebiyle bir güç sistemindeki faz kayması [21].
Görüleceği gibi birinci faz referans olarak alınacak olursa bu faza ait gerilim vektörünün yönü değişik
gerilim seviyelerinde farklı bir hal almaktadır. Uygun bağlantı tarzları kullanılarak 30° den fazla faz
kaymaları da elde etmek mümkün olmaktadır.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
41
2.2.3.2 Üç sargılı transformatörler
Güç sistemlerinde kullanılan transformatörlerin bir çoğu üçüncü bir sargıya (tertiary) sahiptirler.
Üçüncül sargı harmonikleri bastırmak, toprakla temas sağlamak gibi çeşitli amaçlar için
U2
U1
U3
kullanılmaktadır. Şekil 28 de bu tip bir transformatörün sargıları gösterilmiştir.
Şekil 28 Üç sargılı transformatör.
Bu tip transformatörlerin modellenmesinde karşılaşılabilecek en önemli sorun her üç sargının farklı voltamper değerlerine sahip olmasıdır. Bu durumda genellikle normalize edilmiş sargı empedansları her bir
sargının kendi anma volt-amper değerinde üreticiler tarafından sunulur. Fakat bu değerleri empedans
diyagramında kullanabilmek için ortak bir volt-amper bazına bağlı olarak ifade etmek gerekmektedir.
Bu transformatörlerin boş çalışma kayıpları ihmal edilerek eşdeğer devresi Şekil 29 de sunulmuştur. Bu
eşdeğer devreye ait elemanların büyüklükleri yapılacak bir seri kısa devre deneyi ile belirlenebilir.
Unutulmamalıdır ki aşağıdaki şekilde görülen yıldız noktası hayali bir noktadır.
Z1
Z2
Z3
Şekil 29 Üç sargılı transformatörün eşdeğer devresi.
Bu deneyler şu şekilde sıralanabilir;
•
Birinci taraftan ikincil sargı kısa devre üçüncül sargı açık,
•
Birinci taraftan ikincil sargı açık üçüncül sargı kısa devre,
•
İkinci taraftan üçüncül sargı kısa devre birinci sargı açık.
Birinci deney neticesinde Z12 ile göstereceğimiz birinci ve ikinci sargı arasındaki kaçak empedans, ikinci
deney ile Z13 ile gösterilen birinci ve üçüncü sargı arasındaki kaçak empedans ve son deney ile de Z23 ile
gösterilen ikinci ve üçüncü sargı arasındaki kaçak empedans hesaplanabilir. Bu empedansların aynı
gerilim değerleri baz alınarak normalize edilmesi ile de verilen bağıntı kullanılarak her bir sargının
empedansı hesaplanabilir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
42
Z12=Z1+Z2
Z23=Z2+Z3
Z13=Z1+Z3
Z1=[ Z12 +Z13 -Z23]/2
Z2=[ Z12 +Z23 -Z13]/2
Z3=[ Z23 +Z13 -Z12]/2
. 107
Pratikte üçüncü sargının empedansı çok yüksektir ve bir çok çalışmada ihmal edilirler. Ancak bilhassa
dengesiz çalışma durumlarında bu sargı hesaba katılmalıdır.
2.2.3.3 Oto-transformatörler
Oto-transformatörler yapısal olarak normal transformatörlerden farklıdırlar. Zira oto-transformatörlerde
birinci ve ikinci sargı hem elektriksel olarak hem de manyetik olarak birbirlerine bağlanmışlardır. Bu tip
transformatörler en iyi performansı dönüştürme oranının küçük olduğu farklı gerilimlerde işlemekte olan
iletim sistemlerini birbirine bağlamakta göstermektedirler (mesela 275/132kV). Ayarlanabilir yapıda
imal edilmeleri kolay olduğundan gerilim ayarlayıcısı (regülatör) olarak yaygın olarak
kullanılmaktadırlar. Üç fazlı oto-transformatörler genellikle yıldız bağlı olup yıldız noktası
topraklanmıştır. Bir diğer genel özellikleri ise harmonikleri yok etmek amacıyla kullanılan üçüncül bir
sargıya sahip olmalarıdır.
Birinci taraftan ikinci tarafa güç hem normal iletim hem de manyetik bağlantı sayesinde aktarılmakta
olduğundan aynı güçteki bir transformatöre göre daha küçük olarak boyutlandırılabilirler. Maliyet ve
kayıplar bakımından oto-transformatörler avantajlı olmakla beraber birinci taraf ile ikinci taraf arasında
izolasyon olmaması bir mahsurdur. Oto-transformatörlerden kaynaklanan bir diğer önemli sorunda kısa
devre akım seviyesinin aynı büyüklükteki normal bir transformatöre göre daha büyüktür.
Bu özellikleri sebebiyle oto-transformatörlerde iki çeşit güçten söz etmek mümkündür. Bunlar ortak
sargıda oluşan güç yani tip gücü ve transformatörün anma gücüdür. Bu güçler ile alakalı hesaplamalar
için önce transformatörün yapısını incelememiz gerekmektedir. Şekil 30 da bir oto-transformatörün
I1
Is
Us
I2
U1
UB
IB
U2
yapısı görülmektedir.
Şekil 30 Oto-transformatör
Yukarıdaki şekilde ortak bobine ait büyüklükler B alt-yazımı ile seri sargıya ait büyüklükler s alt-yazımı
ile gösterilmiştir. Bu durumda dönüştürme oranı U1 ve U2 gerilimlerin oranı ile veya sarım sayısı dikkate
alınarak,
a=U1/U2=(Ns+NB)/NB
. 108
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
43
şeklinde yazılabilir. Denklem . 108 ye bakacak olursak dönüştürme oranı daima birden büyüktür;
a=1+Ns/NB
. 109
Dönüştürme oranı yerine yazılacak olursa
Ns/NB =a-1
. 110
sonucuna ulaşılır. Şekil 30 incelenecek olursa dönüştürme oranı akımların oranı şeklinde yazıldıktan
sonra bobin ve sargı akımları arasında ki oran
a=I2/I1
. 111
IB/Is=(I2-I1)/I1=(I2/I1)-1
. 112
şeklinde yazılabilir. 111 ve . 112 birleştirilecek olursa
IB/Is=a-1
. 113
yazılır. Oto-transformatörün normal çift sargılı bir transformatör olarak görünür gücü UBIB ve ototransformatör olarak gücü U1I1 ise bunların oranı
U I
U 1 I1
Oto - transformatör olarak güç
= 1 1 =
Transformatör olarak güç
U B I B (U 1 − U 2 ) I 1
=
a
a −1
. 114
şeklinde yazılabilir. Bu orana dikkat edilecek olursa iki taraf gerilim seviyesi arasında çok büyük bir fark
yoksai azami faydayı sağlayabilecek transformatör elde edilmiş olur [22].
2.2.3.4 Kademeli transformatörler
Ayarlı (veya kademeli) transformatörler (tap-changer) güç sistemlerinde yaygın olarak gerilim ayarı
yapmak amacıyla kullanılmaktadırlar. Kademe değiştirme düzeneklerinin otomatik olup olmamasına
göre iki tipi bulunmaktadır. Otomatik olanlara yani yükteki değişiklere operatör müdahalesine gerek
kalmadan cevap veren kademeli transformatörlere yük altında kademe değiştiriciler (OLTC, on-load tapchanger) adı verilmektedir. Güç sistemlerinin dinamik modellenmesi için otomatik kademe
değiştiricilerin kontrol mekanizmalarının çalışmalara dahil edilmesi gerekmekte ise de standart
çalışmalar için kontrol sistemlerinin zaman sabitleri genelde çok yavaş oldukları için bu tip
transformatörler dönüştürme oranı anma değerinde olmayan transformatör olarak modellenirler. Bu tip
bir transformatör ve buna ait ideal transformatörlü bir eşdeğer devre Şekil 31 de sunulmuştur.
i
Mesela, 161/138kV, 500/700kV, 500/345kV.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
44
a
Y12
I12
Ut
I21
U2
U1
Şekil 31 Anma dönüştürme oranına sahip olmayan transformatör
Şayet Şekil 31 de verilen transformatörün dönüştürme oranı anma değerinde iken a=1 denirse ve Y12
normalize edilmiş kaçak admitans ise bu transformatöre ait akım bağıntıları denklem . 115 da verilmiştir.
I12=Y12U1-Y12U2
I21= Y12U2-Y12U1
. 115
Bu durumda I12 ve I21 in genliklerinin birbirine eşit fakat ters yönde olduğu ve ters işaret taşıdığı açıktır.
Terminal uçlarındaki gerilim Ut ve sistemden akan akım I12 ve dönüştürme oranı a nın birden farklı
olduğu durumlar için,
Ut=U1/a
I12=-I21/a
. 116
yazılabilir. Şekil 31 de verilen sistemden akan akım
I12=Y12(U2-Ut)
. 117
şeklinde yazılabilir. 116 de verilen bağıntılar kullanılarak . 117 yeniden yazılacak olursa,
I12=Y12U2-Y12V1/a
I21=-Y12U2/a+Y12V1/a2
. 118
bulunur. Bu denklem takımı bir Π eşdeğer devre ile gösterilebilir. Şekil 32 da bu eşdeğer devre
gösterilmektedir.
I12
Y12/a
Y12(1-a)/a2
I21
Y12(1-a)/a
Şekil 32 Ayarlı transformatöre ait Π eşdeğer devre.
Bu gösterim Y/∆ bağlı üç fazlı transformatörlerin tek fazlı elemanları için dikkatli kullanılmalıdır. Zira
bu tip transformatörlerin üçgen bağlı tarafın gerilimi dengeli çalışma durumunda anma geriliminden
1.732 kat fazla olacaktır dolayısıyla bu tip transformatörler anma dönüştürme oranında çalışsalar bile
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
45
a=1.732 olmak şartıyla modellenmelidirler. Bu transformatörün anma dönüştürme oranında olmaması
durumunda dönüştürme oranı üçgen bağlantı dikkate alınarak hesaplanmalıdır.
∆/∆ veya yıldız tarafından ayarlanan Y/∆ transformatörler Şekil 32 da gösterilen eşdeğer devrenin iki
taraftaki dönüştürme oranlarının gerçek dönüştürme oranını yansıtacak şekilde düzenlenmesi yoluyla
modellenmesi gerekmektedir. ∆/∆ transformatörler ise bir ∆/Y bağlı transformatörün Y/∆ bağlı ikinci bir
transformatörle kaskad bağlanması yoluyla modellenebilmektedir. Kaskat bağlı her bir transformatörün
yıldız noktaları direk topraklanmış ve kaçak empedansları esas transformatörün kaçak empedansının
I1
y
a1
a2
I2
U2
U"
U'
U1
yarısı kadar olmalıdır. Şekil 33 da bu tarz düzenlenmiş bir transformatöre ait eşdeğer devre sunulmuştur.
Şekil 33 He r iki sargısı da anma değerinde bulunmayan transformatörün eşdeğer devresi.
Şekil 33 da verilen devreyi birinci taraf terminal akımı için çözecek olursak,
I1=[(U’-U”)y]/a1
. 119
bulunur. Gerilim değerleri terminal büyüklükleri göz önüne alınarak yerine yazılacak olursa,
U1 U 2
y
−
a1 a 2
y
y
U2
I1 =
= 2 U1 −
a2
a1a 2
a1
. 120
olur. Aynı şekilde ikinci taraf akımı içinde benzer bir bağıntı yazılacak ve sonuç matris biçiminde ifade
edilecek olursa,
− I2 =
y
y
U1 − 2 U 2
a1a 2
a2
. 121
bulunur.
2.2.3.5 Faz kaydırıcılar
Güç sistemlerinde temel üretim unsurları genaratörler olmakla beraber yük akışı kontrolü faz kaydırıcı
transformatörler (Phase-Shifter Transformer, PST) yardımıyla gerçekleştirilebilmektedir. Normalde bir
sistemden akan aktif ve reaktif gücün miktarı değişik yollardaki empedanslarla belirlidir. Reaktif güç
akışı gerilimin genliği vasıtasıyla ayarlanabilmekle beraber aktif güç akışında gerilim genliğinin çok
önemli bir etkisi bulunmaktadır. Güç akışı bir hattın iki noktası arasındaki gerilimin genliğinden ziyade
açısını değiştirmekle kontrol edilebilmektedir. Bu tip transformatörler özellikle İngiliz iletim firması
National Grid tarafından yaygın olarak kullanılmakta olup Balkan ülkeleri arasındaki güç alış verişini
gerçekleştirme maksadıyla işletime alındığı rapor edilmiştir [23]. Bu araçların kullanımının temel gayesi
hatlardan akan güç üzerinde bir çeşit kontrol sağlamaktır. Somut bir anlatımla; farklı ısıl (thermal)
limitlere sahip paralel hatların yüklenmesini kontrol etmek veya ağ şeklindeki bir şebekedeki mümkün
farklı akış yollarından isteneni kullanmak amacıyla bu cihazlar kullanılmaktadır. Özelleştirme veya
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
46
özerkleştirme yoluyla parçalanmış sistemlerde bu cihazların kullanım yeri gittikçe artmaktadır. Şekil 34
de bu tip bir cihaza ait prensip şeması görülmektedir. Buradaki bağlantı tek bir faz için gösterilmiş olup
diğer fazlarda benzer şekilde bağlantılandırılmalıdır.
a
b
c
u'bc
ubc
Şekil 34 Faz kaydırıcı transformatörün bir fazına ait bağlantı şeması.
Bu tip transformatörler genelde ayarlı olarak yapılmakta olup ayar mekanizmaları otomatik veya manual
olabilmektedir. Şekil 34 de görülen Ubc gerilimini üreten besleme transformatörü alçaltan bir
transformatör olup ayarlı yapılmaktadır. Seri bağlı olan transformatörün (Booster) dönüştürme oranı ise
birdir. Piyasada çok farklı tarzlarda imal edilmiş olan faz kaydırıcı transformatör kullanılmaktadır. Şekil
35 de bu tip bir cihaza ait fazör diyagramı görülmektedir.
Uc
Ubc
δ
Ua
U’bc
U’a
Ub
Şekil 35 Faz kaydırıcıya ait fazör diyagram.
Şekil 35 de verilen fazör diyagramının incelenmesi faz kaydırıcıların genel çalışma prensibi hakkında
bilgi verecektir. Bu transformatörleri modellemek için Şekil 33 da verilen eşdeğer devreyi inceleyeceğiz.
Bir faz kaydırma olduğundan bu şekildeki transformatör kompleks dönüştürme oranı ile verilmelidir.
Ayrıca UI* teriminin ideal transformatör üzerinden değişimi nedeniyle akımlar ve gerilimlere ait
dönüştürme oranı birbirinden ayrılmalıdır. Yani,
U1I1*=-U’I’*
veya
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
47
U1=(a+jb)U’=αU’
I1*=-I’*/(a+jb)= -I’/(a-jb)= -I’/α*
. 122
olur. Görüldüğü gibi Şekil 33 da verilen transformatör akım (αi) ve gerilim (αu) için olmak üzere iki
farklı dönüştürme oranına sahiptir. Bu değerler kullanılarak devre çözülecek olursa,
I1=-I’/αi=(U’-U”)y/αi
=(U1/αu-U/α2)y/αi
. 123
Bu denklem düzenlenecek olursa ve benzer şekilde ikinci taraf için de yazılacak olursa,
I1 =
y
α iα u
− I2 =
U1 −
y
α iα 2
U2
y
y
U1 − 2 U 2
au a2
a2
. 124
bulunur. Bu bağıntılara ait bir eşdeğer devre üretilebilecek olsa da sistem matrisindeki simetrisizlik
sebebi ile oluşacak olan devre doğrusal olmayacaktır.
2.2.3.6 Topraklama transformatörleri
Mümkün bir toprak arızası anında sistemden akacak olan arıza akımının değeri üzerinde bir kontrol
sağlamak amacıyla özellikle İngiliz pratiğinde kullanılan bir yöntem de sistemin topraklama amacıyla
düzenlenmiş bir transformatör üzerinden topraklanmasıdır. Bu transformatörler pozitif ve negatif sıra
devreleri için çok düşük bir empedans sağlamalarına rağmen sıfır sıra için yüksek empedans üretecek
tarzda imal edilirler. Bu sebeple genellikle dengeli durum çalışmalarında sistemi etkilemedikleri için
ihmal edilebilmekte fakat dengesiz durumlarda mutlaka hesaba katılmalıdırlar. Bu transformatörler
genellikle üçgen bağlı ikincil sargıya sahip transformatör gruplarının bulunduğu durumlarda
kullanılmaktadırlar. Şekil 36 de bu tip bir transformatörün bağlantısı görülmektedir.
Y/∆
Ana Transformatör
Zikzak
Topraklama Transformatörü
AG dahili yük
Şekil 36Topraklama transformatörünün bağlantısı.
Bu cihazlar elektrik istasyonlarının iç güç ihtiyacını karşılamak için de kullanılmaktadırlar. Bu amaçla
kullanılan transformatörler genellikle üç değişik tarzda yapılmaktadır [24]. Bunlar;
•
Zikzak/Yıldız,
•
Yıldız/Zikzak,
•
Yıldız/Üçgen/Zikzak
olarak sıralanabilir. Bu üç değişik transformatör bağlantı gurubunun özellikleri ve kendine has faydaları
şu şekilde sıralanabilir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
48
Zikzak/Yıldız:
Ana transformatörün üçgen bir ikincil sargıya sahip olduğu durumlarda zikzak bağlı bir sargı orta
gerilim şebekesi için düşük reaktansa sahip bir nötr noktası sağlayabilmektedir. Pratikte üç bacaklı imal
edilen demir gövde sıfır sıra empedansı için düşük bir empedans temin etmektedir. Bu özellik sayesinde
sınırlı bir dengesiz yükleme imkanı olabilmektedir. Daha fazla bir yükleme için beş bacaklı çekirdek
dizaynı veya kabuk tipi çekirdeklere gereksinim vardır. Bu tip transformatörler için 250 ile 500kVA
arası bir dahili yük mümkün olabilmektedir. Ancak transformatör anma değeri artıkça rekatans artmakta
ve regülasyon problemi ortaya çıkmaktadır.
Yıldız/Zikzak:
Bu tip transformatörler yük dengesizlilikleri için uygun bir yapıya sahip olmalarına rağmen orta gerilim
şebekesinde meydana gelebilecek bir toprak arızası durumunda yüksek empedanslı bir topraklama
sunduğundan pek büyük bir fayda sağlamamaktadır.
Yıldız/Üçgen/Zikzak:
Aradaki üçgen sargıda dolaşan iç üçgen akımı dengeleyici bir karakter arz etmekte ve dengesiz
yüklenebilme imkanını artırmaktadır. Bu tip transformatörler toprak arızalarına düşük empedanslı bir yol
sağlayabildikleri için ayrıca faydalıdırlar. Fakat ilave bir üçüncü sargının bulunması transformatörün
maliyetini klasik Zikzak/Yıldız transformatörlere göre artırmaktadır. Ancak yüklenebilme oranının
yüksek olması sebebiyle iç ihtiyacı fazla olan büyük transformatör postalarında kullanılmaktadır.
2.3
Üreteçler
Elektrik güç sistemlerinde kullanılan üreteçler genelde senkron alternatörlerdir. Bazı küçük rüzgar
santrallarında asenkron jeneratörler kullanılmakla birlikte bu tip üreteçlerin güç sistemlerinde normal
işleme şartlarında önemli bir ağırlığı yoktur. Ancak arızalı hal durumlarında sisteme bağlı büyük güçlü
asenkron veya senkron motorlar bir üreteç gibi davranabilirler. Dolayısıyla bu makinelerin de dengesiz
çalışma şartlarında üreteç olarak incelenmesi mümkündür. Arızalı durum çalışmaları esnasında bu
durum ayrıca incelenecektir.
Bu kısımda senkron makinelerin genel yapısı ve güç sistemlerindeki kalıcı durumların hesaplanmasında
kullanılan modeller üzerinde durulacaktır. Geçici durum ve dinamik analizlere kullanılacak daha
gelişmiş modeller ilerdeki bölümlerde incelenecektir. Genelde elektrik makineleri özelde ise senkron
makineleri konusunda çok geniş bir literatür mevcut olup konu çok güzel bir biçimde çok sayıda ders
notu ve kitabıyla incelenmiştir. Burada senkron makineler konusunda okuyucunun temel bilgilere sahip
olduğu kabulüyle güç sistemlerini temel alan tarzda bu makinelerin incelenmesi esas alınacaktır. Şurası
hatırda tutulmalıdır ki bu notların amacı senkron makineler konusunda çok geniş bilgiler vermek değil
sadece güç sistemleri çalışmaları için bu makinelerin modellenmesini sağlamak için gerekli altyapıyı
sağlamaktır. Bu makinelerle alakalı çok geniş bir literatür mevcut olup geniş bilgi için müracaat
edilebilir [mesela 25 den 30 ye].
2.3.1 Senkron Makinelerin Yapısı
Alternatör olarak kullanıldıklarında bu makinelerin basit olarak çalışma prensibi; rotor bir tahrik
makinesi ile döndürülerek stator üzerine yerleştirilen sargılar üzerinde gerilim indüklemektedir şeklinde
özetlenebilir. Yapı itibariyle hareketli olduklarından güç sistemleri bakış açısıyla hareketli (Dönen)
transformatörler olarak incelenmeleri mümkündür. Makine hareketli olduğundan yapılacak çalışmanın
ihtiyaçlarına göre özellikle dinamik sistem analizleri için sadece elektrikli kısmın değil mekanik aksamın
da modellenmesi gerekebilmektedir. Fakat kalıcı durum analizleri (steady-state çalışmalar) için
genellikle mekanik modelleme ihmal edilebilir. Hatta dinamik çalışmalar için de bazı durumlarda
(mesela çok hızlı geçici olayların incelenmesinde) mekanik aksamın zaman sabitesi nispeten büyük
olduğundan ihmal edilebilmektedir.
Senkron makinelerin iki önemli unsuru bulunmaktadır. Bunlar sabit olan üzerine faz sargıların genellikle
dağıtılmış olarak yerleştirildiği ‘stator’ ve hareketli olan, doğru akımla beslenen uyartım sargılarının yer
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
49
aldığı ‘rotor’dur. Şekil 37 de iki kutuplu bir senkron makinenin basit şematik gösterimi, rotor ve
statorun durumları sunulmuştur.
Rotor
Stator
Şekil 37 Senkron makinenin yapısı, rotor ve stator.
Senkron alternatörler genelde iki tip üretilmekte ve santralde kullanılan temel enerji çeşidine göre bu
tiplerden biri kullanılmaktadır. Senkron jeneratörler iki başlık altında toplanabilmektedir. Bunlar;
•
Çıkık kutuplu (Salient pole) senkron makineler
•
Silindirik kutuplu veya düz senkron makineler (Turbo alternator)
Çıkık kutuplu senkron makineler adında anlaşılacağı gibi kutupların rotor üzerine dağıtılmadan
yerleştirilmesi ile imal edilmektedir. Bu tip makineler yapı itibarıyla düşük hızlı olmak zorunda
oldukları için düşük hızlı yani çok kutuplu olarak yapılmakta ve alternatör olarak kullanıldıklarında da
genellikle su türbinleriyle tahrik edilmektedirler. Buna karşılık daha yüksek hızlı olarak imal edilebilen
silindirik kutuplu alternatörler hızlı buhar türbinleri ile tahrik edilebilmektedirler.
2.3.2 Senkron makine parametreleri
Şekil 37 de çıkık kutuplu bir senkron makinenin gösterildiği görülmektedir. Bu şekilde uyartım
sargılarının rotor üzerinde yer aldığı ve bu sargıların oluşturduğu manyetik akıların rotor ve stator
arasındaki hava boşluğu üzerinden devresini tamamladığı görülecektir. Rotor ve stator arasındaki bu
boşluğun çıkıklık sebebiyle her noktada aynı, sabit uzaklıklı bir boşluk olmadığı görülmektedir. Rotorun
saat ibresi yönünde döndürüldüğü kabul edilecek olursa boşluk rotor hızına dolayısıyla zamana bağlı
olarak bir değişim gösterecektir. Bu değişim manyetik devrenin toplam relüktansında bir değişim
biçiminde kendini gösterecek, buna bağlı olarak da her iki sargıyı halkalayan manyetik akı dolayısıyla
da her bir sargının reaktansı ve sargılar arasındaki karşılıklı reaktans rotor pozisyonuna yani zamana
bağlı olarak değişecektir. Senkron makine reaktansında rotor pozisyonuna bağlı olarak gerçekleşen bu
değişim açık bir şekilde kısa devreye maruz kalan senkron makine akımının değişimde
gözlemlenebilecektir. Şekil 38 de terminal uçlarında üç faz kısa devresi gerçekleşen bir senkron
alternatörün faz ve uyartım akımlarının değişimi görülmektedir.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
50
Şekil 38 Terminal uçlarında kısa devre edilen senkron makinenin akımları ([30] den alınmıştır).
Bu değişim özellikle yirmili yıllarda fiziksel olarak incelenerek bugün hala yaygın olarak kullanılan iki
reaksiyon teorisi olarak isimlendirilen teknikle incelenmektedir. Özellikle imalatçılar tarafından yaygın
olarak kullanılan bu teknikte simetrili bileşenler tekniğinin temelini oluşturan dönüşüme benzer bir
şekilde stator referans çerçevesini esas alarak hesaplanan stator parametrelerinin rotor referans eksenine
yansıtılması/dönüştürülmesi ve sonra oluşacak eşdeğer devrenin ortak seçilen bir baz üzerinden
normalize edilmesi ile gerçekleştirilmektedir.
Şekil 39 da üç fazlı tek kutuplu bir senkron makinenin stator ve rotoruna ait referans çerçevelerinin
yerleşimi gösterilmiştir. Stator referans çerçevesini oluşturan vektörler her bir faza ait büyüklüklerden
oluşmuş olup birbirlerine 120 derecelik faz farkı olacak şekilde yerleştirilmiştir. Rotor ise iki ayrı eksen
üzerinde yer alan bir referans çerçevesine sahiptir. Rotor kutupları boyunca uzanan kutup ekseni ki
boyuna veya direk eksen olarak da adlandırılmaktadır. Kutup çifti arasında yeralan ise enine veya
quadrature eksen olarak adlandırılmaktadır. Birincisi d-ekseni, ikincisi q-ekseni olarak kısaltılacaktır.
Rotor ve stator referans çerçeveleri frekansa bağlı olarak belli bir hızda dönmekte ve bu referans
çerçeveleri arasında makinenin yüküne bağlı bir (δ) açısı mevcuttur.
d ekseni
Birinci Faz
Stator
q ekseni
Rotor
İkinci Faz
Üçüncü Faz
Şekil 39 Senkron makinenin vektör yerleşimi.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
51
İlk defa R.H. Park [31, 32] tarafından geliştirilen iki reaksiyon teorisi ve buna bağlı
yansıtma/dönüştürme tekniği literatürde Park Dönüşümleri olarak adlandırılmaktadır. İlk kurulduğundan
bu yana nümerik kararlığı sağlamak amacıyla bazı değişikliklere uğramış olmakla beraber bilhassa
imalatçılar tarafından Park’ın orijinal çalışması senkron makinenin parametrelerini belirlemek amacıyla
yaygın olarak kullanılmaktadır. Bununla beraber literatürde daha kullanışlı değiştirilmiş dönüşümlerde
mevcuttur [29, 30].
Bu tekniğe göre senkron makinenin faz reaktansları rotor enine (q) ve boyuna (d) eksenleri üzerine
yansıtılmakta ve makine reaktansları enine (xq) ve boyuna (xd) reaktans şeklinde incelenmektedir. Bu
reaktanslar rotor pozisyonuna bağlı olarak senkron, geçici (transient) ve geçici-altı (sub-transient)
reaktanslar olarak değişim göstermektedir. Konuyla alakalı teorik bilgi ilerideki bölümlerde kararlılık
problemlerini incelerken verilecektir.
Self endüktans (mH)
Senkron makine reaktansları analitik olarak da Prentice [33] tarafından incelenmiş ve reaktansların rotor
pozisyonuna bağımlılığı analitik olarak deneysel sonuçlarla da desteklenerek gösterilmiştir. Şekil 40 da
dört kutuplu, 15kVA, 220V etiket değerine sahip çıkık kutuplu bir senkron motorun self-endüktansının
rotor pozisyonuna göre değişimi görülmektedir.
d-ekseni ile faz ekseni açısı (derece)
Şekil 40 Senkron makinenin bir fazına ait self-endüktansın rotor pozisyonuna göre değişimi [33].
Karşılıklı endüktans (mH)
Noktalar ölçülen değerleri, eğri ise Prentice tarafından ideal bir makine için analitik olarak hesaplanan
değerleri göstermektedir. Benzer tarzda Şekil 41 de ise aynı motor için faz sargıları arasındaki (faz a ve
b) karşılıklı endüktansın rotor pozisyonuna göre değişimi gösterilmiştir. Bu şekilde de noktalar ölçülen
değerleri eğri ise hesaplanan değerleri göstermektedir.
d-ekseni ile faz ekseni açısı (derece)
Şekil 41 a ve b fazları arasındaki karşılıklı endüktansın rotor açısı ile değişimi [33].
Bu hesaplama tarzı direk faz büyüklüklerini kullanarak makinenin incelenmesine imkan sağlamaktadır.
Ancak bu tarz bir analiz karmaşık ve birden fazla makinenin bulunduğu sistemlerin incelenmesi
esnasında zamana bağlı ve lineer olmayan elemanların sayısının fazla olması sebebiyle nümerik
problemlere yol açmaktadır. Günümüzde gelişmiş bilgisayarlar ve nümerik araçlar sayesinde bu tarz
modellemede kullanım alanı bulmaya başlamıştır [34, 35].
Bu bölümde sadece kalıcı durum analizleri için gerekli modeller üzerinde duracağımız için gelişmiş
modellerle alakalı malumat ileri bölümlerde sunulacaktır. Genellikle kalıcı durum analizleri için
empedans arkasında bir gerilim kaynağı şeklinde özetlenebilecek bir üreteç modelinin yeterli olacağı
kabul edilmektedir. Hatta bu model büyük sistemlerin dinamik analizinde uzaktaki makinelerin
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
52
benzetiminde de sağlıklı bir şekilde kullanılmaktadır. Yine gösterilmiştir ki [36] özellikle ilk periyot için
yapılan kararlılık analizleri için bu tarz basit modeller daha kullanışlı olmaktadır. Dinamik benzetim
teknikleri ile alakalı daha geniş bilgi ilgili bölümlerde verilecektir.
Şekil 42 de özellikle kalıcı durum hesaplamalarında yaygın bir şekilde kullanılmakta olan empedans
arkasında gerilim kaynağı modeli görülmektedir. Dengeli çalışma şartlarında fazlar eşit olarak
yüklenildiği için makinenin tek fazlı gösterimi yeterli olmaktadır. Dengesiz işleme durumları için uygun
dönüştürme teknikleri (mesela Park [32] veya Clarke [37] dönüşümleri) simetrili bilşenler tekniğiyle
birlikte veya direk faz gösterimleri kullanılmalıdır.
R
Xg
Ib
U
E
Şekil 42 Senkron makine için empedans arkasında gerilim kaynağı modeli.
Şekil 42 de sunulan devrede R ile gösterilen eleman, senkron makinenin rezistansı olup genellikle
armatür rezistansına eşit kabul edilebilir. Eşdeğer devrenin rezistansı bütün çalışma durumları için sabit
kabul edilmektedir. Ib yük akımı olup her üç fazı da dengeli bir şekilde yüklediği kabul edilmektedir. U
makinenin terminal uçları arasındaki gerilim olup burada faz-nötr gerilimine eşittir. E makine
sargılarında uyartım akısı sebebiyle indüklenen iç-gerilim olup şayet makine büyüklükleri normalize
edilmiş ise bu değer uyartım sargısı gerilimine Per-unit olarak eşittir.
Bu değerlerden en enteresanı Xg jeneratör reaktansı olup. Aslında rotor pozisyonuna bağlı olarak
değişmekte ve iki temel unsurdan oluşmaktadır, bunlar enine ve boyuna eksen bileşenleridir. Enine
eksen reaktansı (Xq) boyuna eksen reaktansından (Xd) büyüktür. Ancak turbo-alternatörler için bu iki
değer birbirine eşit kabul edilebilirler. Bu varsayım analizleri önemli nispette basitleştirmektedir. Çıkık
kutuplu makineler için bu iki terim birbirine eşit değildir. Ancak basitleştirme amacıyla burada turbomakine üzerinde durulacaktır.
Şekil 43 de Ib faz akımı ile ve U terminal gerilimine sahip yüklü bir senkron jeneratör için verilen fazör
diyagramı görülmektedir.
d-ekseni
E
U
Ib
q-ekseni
IbXg
IbR
Şekil 43 Yüklü bir senkron makine için fazör diyagramı.
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
53
Referanslar
1 LACROIX, B., CALVAS, R.: ‘Earthing systems world-wide an evolutions’, (Merlin Gerin Technical
Specification n° 173, September 1995)
2 The Electricity Supply Regulations: 1988, No. 1057, 1. October.1988.
3 IEC 364: ‘Electrical Installations of Buildings, Part 5 Chapter 54’, International Electrotechnic
Commission publication, 1980.
4 TAYLAN N.: ‘Dağıtım Şebekelerinde İşletme Kayıpları Hakkında Öneriler’, TMMOB Elektrik
Mühendisleri Odası İSTANBUL Şube Bulteni, Ocak-Şubat 1999, Sayı: 15 Sayfa: 29-31.
5 KUNDUR, P: ‘Power System Stability and Control’, (McGraw-Hill, 1994)
6 TEKİNEL, H., ‘Elektrikle Enerji Taşıma’, (Ankara D.M.M.A. Yayını, 1974)
7 ARRILAGA, J., ARNOLD, C.P., ‘Computer Analysis of Power Systems’, (J. Wiley and Sons,
London, 1990)
8 STEVENSON, W.D., ‘Elements of Power System Analysis’, (McGraw-Hill, Fourth Ed., 1982)
9 FORTESCUE, C.L., ‘Method of Symmetrical Co-ordinates Applied to the Solution to Polyphase
Networks’ Trans. AIEE, 1918, Vol.37, pp. 1027-1918
10 GROSS, C.A., ‘Power System Analysis’, (J. Wiley and Sons, New York, 1986 2. Ed.)
11 MELIOPOULOS, A.P.S.: ‘Power System Grounding and Transients: an Introduction’, (Marcel and
Decker Inc., 1988)
12 HOCAOĞLU, M.H., ‘Hat Parametrelerinin Frekansa Bağımlılığı’ Yüksek Lisans Tezi, Marmara
Üniversitesi, 1989.
13 ERGENELI, A., ‘Simetrili Bileşenler’, (İDMMA –Yıldız- Yayını, İstanbul, 1984 )
14 İNAN, M., ‘Orta Gerilim Şebekeleri’, (İTU Yayını, 2 Cilt)
15 BICKFORD, J.R, MULLINEWX, N., REED, J.R., ‘Computation of Power Systems Transients’,
(IEE Monograph Series 18, 1983)
16 WAGNER, C.F., EVANS, R.D., ‘Symetrical Components –As applied to the Analysis of Unblanced
Electrical Circuits-’, (Krieger Pub. CO., USA, 1982 –Reprint from 1933 ed.-)
17 CARSON, J.R., ‘Wave Propagation in Overhead Wires with Ground Return’, Bell System Technical
Journal, 1929, pp.539-554
18 RUDENBERG, R., ‘Fundemental Considerations on Ground Currents’, Electrical Engineering,
January 1945.
19 ÇETİN, İ., ‘Transformatör’, (Arpaz Matbaacılık, 1981, 2. Baskı)
20 STIGANT, S. A., ‘The J&P Transformer Book’, (Newnes Butterworths, London,1973)
21 WEEDY, B.M., ‘Electric Power Systems’, (3rd ed., John Wiley & sons, 1994)
22 GÖNEN, T., ‘Modern Power System Analysis’, (John Wiley&sons, 1988)
23 PAPAZOGLU, T. M., ‘Phase Shifting Transformers in an Efficient Power Flow Control Method’,
Proceedings of the International Conference on Electrical and Electronics Engineering ELECO’99,
December 1999, pp. 325-328
24 BAYLISS, C. (editor), ‘Transmission and Distribution Electrical Engineering’, (Newnes, Oxford,
Second Ed., 1999)
25 BODUROĞLU, T., ‘Elektrik Makinaları Dersleri (Teori Hesap Konstriksiyon) Cilt III kısm 1 ve 2
(Senkron makineler)’ (İTÜ Yayını, 1981 ve 1986)
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
54
26 SARIOĞLU, K., ‘Elektrik Makinalarının Temelleri II (senkron Makinalar)’ (İTÜ Yayını, 1987 2.
Baskı)
27 ADKINS, B., Harley, R.G.: ‘The General Theory of Alternating Current Machines: Application to
Practical Problems’ (Chapman and Hall, London, 1975).
28 RAMSHAW, R., VAN HEESWİJK, R.G., “Energy Conversion Electric Motors and Generators”,
(Saunders College Publishing, 1989, USA)
29 CONCARDIA, C.: ‘Synchronous Machines, Theory and Performance’, (J. Willey and Sons Inc. New
York, Chapman & Hall Ltd. London, 1951)
30 KIMBARK, W.E.: ‘Power System Stability, Volume III Synchronous machines’, (IEEE Press, New
York, 1995, 2nd ed.)
31 113. PARK, R.H.: ‘Two reaction theory of synchronous machines Pt 1’, AIEE Trans. 1929, vol. 48,
pp. 716-30
32 PARK, R.H.: ‘Two reaction theory of synchronous machines Pt 2’, AIEE Trans. 1933, vol. 52, pp.
352-55
33 PRENTICE, B.R.: ‘Fundamental concepts of synchronous machine reactances’, AIEE. Trans. 1937,
vol. 56 supplement, pp. 1-21
34 SUBRAMANIAM, P., MALIK, O.P.: ‘Digital simulation of a synchronous machine in direct-phase
quantities’, Proceedings of IEE, Jan. 1971, Vol. 118, No 1, pp. 153-160
35 MARTI, J.R., LOUIE, K. W.: ‘A phase domain synchronous generator model including saturation
effects’, IEEE Trans. on PAS, Feb. 1997, Vol. 12, No 1, pp. 222-229
36 DANDENO, P.L., HAUTH, R.L., SCHULZ, R.P.: ‘Effects of synchronous machine modelling in
large scale system studies’, IEEE Trans. on PAS. 1973 Vol. 92, pp. 574-82
37 CLARKE, E.: ‘Circuit Analysis of A-C Power Systems’, Volume I and II, (J. Willey and Sons,
London, 1950)
M. Hakan HOCAOĞLU Analiz 1(Notlar).htm
01.03.07
55