GİRİŞ
Newton’un ikinci yasasına göre, bir parçacık üzerine
dengelenmemiş kuvvetler etkidiğinde ivmelenecektir.
Kinetik dengelenmemiş kuvvetler ile onların harekette
yarattıkları değişiklikler arasındaki bağıntıyı inceleyen
dinamiğin bir koludur.
Dengelenmemiş kuvvetler sistemine maruz bir cismin
hareketi temelde üç genel yaklaşım kullanılarak
incelenir:
a) Newton’ un 2. yasasının direkt uygulanması (Hareket
Denklemi veya kuvvet-kütle-ivme yöntemi)
b) İş-Enerji ilkesi
c) İmpuls-Momentum yöntemleri
Kuvvet ile ivme arasındaki temel bağıntıyı Newton’un ikinci yasası
verir, bu yasanın doğrulanması tamamen deneysel yöntemler ile
yapılır.
Newton’un ikinci yasası şöyle ifade edilebilir:
Eğer bir parçacığın üzerine etkiyen bileşke kuvvet sıfırdan farklı
ise, parçacık bu bileşke kuvvetin şiddeti ile orantılı ve bileşke
kuvvet ile aynı yönde bir ivmeye sahip olacaktır.
Newton’un İkinci Yasasının Doğrulanması:
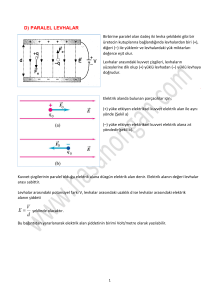
Eğer kütlesi olan bir parçacığı tek bir F1 kuvvetine
maruz bırakır ve parçacığın a1 ivmesini ölçersek,
kuvvet ve ivme şiddetlerinin F1 /a1 oranı C1 gibi bir
sayıya eşit olacaktır. Bu deneyi aynı parçacığı başka
bir F2 kuvvetine maruz bırakarak ve meydana gelen a2
ivmesini ölçerek tekrarlayabiliriz. Şiddetlerin F2 / a2
oranı yine C2 gibi bir sayı olacaktır. Bu deney istenilen
sayıda tekrarlanabilir.
Bu deneylerden iki önemli sonuç elde edilir. İlki,
deneylerde aynı birimler kullanıldığı sürece,
uygulanan tüm kuvvetlerin meydana getirdikleri
ivmelere oranları her zaman aynı sayıya eşittir.
Yani,
Fn
F1 F2
...
C ,
a1 a2
an
sabit
Buradan C‘nin, parçacığın değişmeyen bir özelliğinin ölçüsü olduğu
sonucuna varırız. Bu özellik parçacığın ataletidir (eylemsizliği), yani
hızındaki değişime gösterdiği dirençtir. Ataleti yüksek olan bir
parçacığın (büyük C) belirli bir F kuvveti için ivmesi küçük olacaktır.
Öte yandan, eğer atalet küçük ise ivme büyük olacaktır. m kütlesi
ataletin sayısal bir ölçüsü olarak tanımlanır. Kuvvet ile ivme
arasındaki bağıntıyı
F
C km
a
olarak yazabiliriz, burada k kullanılan birimlere bağlı olarak tanımlanan
bir sabittir. Böylece, deneyler sonucu elde edilen bağıntıyı şöyle
yazabiliriz,
F kma
burada F, m kütleli parçacığın üzerine etkiyen bileşke kuvvetin
şiddetidir ve a ise, parçacığın sonuçta oluşan ivmesinin
şiddetidir.
Elde edilen ikinci sonuç, ivmenin her zaman için uygulanan kuvvet
ile aynı doğrultuda olduğudur.
F kma
SI birim sisteminde, k = 1’dir.
(Hareket Denklemi)
Birincil (Temel) Atalet (Eylemsizlik) Sistemi
(Primary Inertial System )
Yapılan ideal deneyin sonuçları “sabit” birincil atalet
sisteminde yapılan ölçümlere göre elde edilmiş olsa da,
birincil sisteme göre sabit hız ile ötelenen, dönmeyen
bir referans takımına göre yapılan ölçümler için de aynı
derecede geçerlidirler.
Bağıl hareket analizinden sıfır ivme ile ötelenen bir
sistemden ölçülen ivmenin birincil sistemde ölçülen ivme
ile aynı olduğunu biliyoruz. Bu nedenle, Newton’un ikinci
yasası ivmelenmeyen bir sistemde de aynı derecede
geçerlidir, bu nedenle birincil sistemi hareket
denkleminin geçerli olduğu herhangi bir sistem olarak
tanımlayabiliriz.
Eğer tanımlanmış olan ideal deney dünyanın yüzeyinde
gerçekleştirilseydi ve tüm ölçümler de dünyaya
iliştirilmiş bir referans sistemine göre yapılsaydı, ölçülen
sonuçlar hareket denkleminden elde edilecek
sonuçlardan çok az bir farklılık gösterirdi, bu fark
ölçülen ivmenin doğru mutlak ivme olmamasından
kaynaklanmaktadır. Dünyanın ivme bileşenlerine ait
düzeltmeler eklendiğinde bu fark yok olacaktır.
Bu düzeltmeler dünyanın yüzeyinde yer alan yapı ve
makinaların hareketlerini inceleyen çoğu mühendislik
probleminde ihmal edilebilir seviyelerdedir. Bu gibi
problemlerde, dünyanın yüzeyine iliştirilmiş eksen
takımına göre yapılan ivme ölçümleri “mutlak” olarak
kabul edilebilir ve hareket denklemi dünyanın
yüzeyinde yapılan deneylere ihmal edilebilir bir hata
ile uygulanabilir.
Özellikle roket ve uzay aracı tasarımı alanlarında
giderek artan sayıda çalışma yapılmakta ve bu
durumda dünyanın ivme bileşenlerinin göz önüne
alınması gerektirmektedir. Bu gibi çalışmalarda
Newton’un ikinci yasasının temellerinin çok iyi
anlaşılması ve hesaplamalarda uygun mutlak ivme
bileşenlerinin kullanılması gerekmektedir.
1905 yılına kadar, Newton mekaniği kanunları sayısız
fiziksel deney ile doğrulanmış ve cisimlerin
hareketlerinin nihai tanımı olarak kabul edilmişti.
Newton teorisinde mutlak bir değer olarak kabul
edilen zaman kavramı, 1905 yılında Einstein
tarafından ortaya atılan izafiyet teorisinde temel
olarak farklı bir yorum bulmuştur. Bu yeni kavram
mekaniğin kabul edilen kanunlarının tamamen yeniden
bir formülasyonunu gerektirmiştir.
İzafiyet teorisi önceleri kuşku ile karşılansa da deneyler
ile doğrulanmış olup günümüzde tüm dünyada bilim
insanları tarafından kabul görmüştür. Newton ile Einstein
mekaniği arasında çok temel farklar olsa da, ancak ışık
hızı civarındaki (300x106 m/s) hızlarla uğraşıldığında
elde edilen sonuçlarda bir farklılık ortaya çıkmaktadır.
Örneğin, atom seviyesindeki ve nükleer parçacıklarla
ilgili önemli problemlerin çözümünde izafiyet teorisine
ait hesaplamaların kullanılması gerekmektedir.
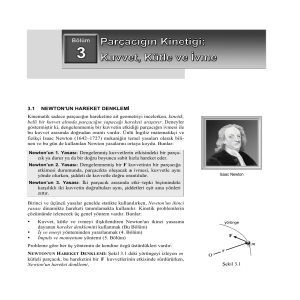
Hareket Denklemi ve Problemlerin Çözümü
m kütleli bir parçacık vektörel toplamları F olan F1, F2,
F3 ,… gibi eşnoktasal kuvvetlerin etkisine maruz
kaldığında, hareket denklemi
F ma
olacaktır. Hareket denklemi cismin üzerine etkiyen
kuvvetlerin ani değerlerine karşılık gelen cismin ani
ivmesini verir.
Hareket denklemini problemlerin çözümüne
uygulayabilmek için, parçacığın kinematiği konusunda
incelenen koordinat takımlarından birinde vektörel
denklemi skaler bileşenleri cinsinden ifade etmek
uygun olur.
Belirli bir problem için en uygun yöntemin seçimi
kuvvet sisteminin doğasına (sabit veya değişken) ve
bulunması istenen bilgiye (tepkiler, ivmeler, hızlar gibi)
bağlı olup her türlü problemin formülasyonundaki en
önemli adımdır.
Problemlerin Çözümü
İki tip problemle karşılaşırız.
1) İvme ya verilmiştir ya da bilinen kinematik koşullardan doğrudan
hesaplanabilir. Daha sonra bu ivmeye karşılık gelen, parçacık üzerine
etkiyen kuvvetleri hareket denklemini uygulayarak bulabiliriz.
F ma
2) Parçacığın üzerine etkiyen kuvvetler tanımlanmıştır ve sonuçta
oluşan hareket sorulur. Eğer etkiyen kuvvetler sabit ise ivme de
sabittir ve hareket denkleminden kolayca hesaplanabilir. Ama eğer
kuvvetler zamanın, konumun veya hızın, ya da bunların bileşiminin
fonksiyonları iseler, hareket denklemi, hızı ve yer değiştirmeyi
belirleyebilmek için integralinin alınması gerekli bir diferansiyel
denkleme dönüşür.
Kısıtlanmış ve Serbest Hareket
(Constrained and Unconstrained Motion)
Serbestlik Derecesi (Degree of Freedom)
Fiziksel olarak iki farklı tip hareket vardır:
İlk tip, kısıtlanmamış harekettir, burada
parçacığın hareketi herhangi bir mekanik
kılavuza bağlı değildir ve parçacık ona
verilen ilk hareket ile dış kaynaklardan
üzerine uygulanan kuvvetlerin etkisi
altında bir yörünge izler. Uçmakta olan
bir uçak ya da roket ve yüklü bir alan
içerisinde hareket eden bir elektron
kısıtlanmamış hareket yapar.
İkinci tip kısıtlanmış harekettir, parçacığın yörüngesi
kısmen ya da tamamen kısıtlayıcı kılavuzlar tarafından
belirlenir. Bir bilye yatay düzlemde kısmen kısıtlanmış
biçimde hareket eder. Raylar boyunca hareket eden tren
ve sabit bir mil üzerinde kayan bilezik tam kısıtlanmış
harekete örnek olarak verilebilir.
Kısıtlanmış hareket sırasında parçacığa etkiyen
kuvvetlerin bir kısmı dış kaynaklardan etkiyor
olabilir, diğerleri ise kısıtlayıcı kılavuzlardan etkiyen
tepkiler olacaktır. Parçacığın üzerine etkiyen,
dışarıdan uygulanan kuvvetler ve tepki kuvvetlerinin
tümü, hareket denkleminde göz önüne alınmalıdır.
Uygun koordinat sisteminin seçimi, genelde kısıtların sayısı
ve geometrisine bağlı olarak yapılır. Böylece, bir uçağın ya
da serbest uçuştaki bir roketin kütle merkezinde olduğu
gibi, eğer parçacık uzayda serbestçe hareket edebiliyor
ise, parçacığın üç serbestlik derecesine sahip olduğu
söylenir, çünkü bu durumda herhangi bir andaki konumu
tanımlayabilmek için üç bağımsız koordinat gerekmektedir.
Hareket denkleminin üç bileşeninin de uzay
koordinatlarının zaman bağlı fonksiyonlarını elde
edebilmek için integralinin alınması gerekir.
Yatay yüzeyde yuvarlanan bilyenin
iki serbestlik derecesi vardır.
Sabit bir mil üzerine kayan bileziğin
ise yalnızca tek serbestlik derecesi vardır.
Serbest Cisim Diyagramı (SCD)
Free-Body Diagram (FBD)
Harekete ait kuvvet-kütle-ivme denklemlerini uygularken, parçacığın
üzerine etkiyen tüm kuvvetleri doğru biçimde göz önüne almamız
gerekir.
Denkleme dahil etmeyeceğimiz kuvvetler ancak etkiyen diğer
kuvvetlere oranla son derece küçük olup şiddetleri ihmal edilebilecek
olan kuvvetlerdir, bunlar dünyanın çekim kuvveti ile
karşılaştırıldığında iki cismin birbirine uyguladığı çekim kuvveti gibi
kuvvetler olabilir.
Kuvvetleri doğru biçimde ele almanın en iyi yolu parçacığın serbest
cisim diyagramını (SCD) çizmektir.
F ma
denklemindeki vektörel toplam F , parçacığın üzerine
etkiyen tüm kuvvetlerin vektörel toplamını ifade etmektedir. Benzer
şekilde, bileşenlere ayrıldığında her bir bileşen yönündeki skaler
toplam da parçacığa o yönde etkiyen kuvvetlerin bileşenlerinin
toplamını kapsamaktadır.
Her bir kuvveti güvenilir ve doğru bir biçimde ele almanın yolu göz
önüne alınan cismi içinde bulunduğu ortamdan ve temas ettiği tüm
diğer cisimlerden ayırarak cismin üzerine diğer cisimlerden etkiyen
kuvvetleri işaretlemektir. Elde edilen serbest cisim diyagramı,
parçacığın üzerine etkiyen tüm bilinen veya bilinmeyen kuvvetlerin
göz önüne alınmasını sağlayan bir araçtır.
Serbest cisim diyagramı Statik’te olduğu gibi Dinamik’te
de aynı temel amaca hizmet eder. Bu amaç, göz önüne
alınan parçacık veya cisme etkiyen tüm gerçek kuvvetlerin
düzgün biçimde değerlendirilebilmesi için güvenilir bir
yöntem ortaya koymaktır. Statik’te bu bileşke sıfıra eşit
iken, Dinamik’te kütle ile ivmenin çarpımına eşittir.
Statik’te bileşke sıfırdır
F 0
Dinamik’te ise kütle ile ivmenin çarpımına
eşittir
F ma
Doğrusal Hareket
m kütleli bir parçacığın doğrusal hareketinin yönü
olarak x-eksenini seçersek, y- ve z-yönlerindeki
ivme bileşenleri sıfır olur ve hareket denkleminin
skaler bileşenleri şöyle yazılır:
Fx ma x
F y 0
Fz 0
Düzlemde Eğrisel Hareket
1) Kartezyen Koordinatlar:
1)
F
x
2)
max
ax vx x
F
F
may
y
a y v y y
F F
2
a ax a y
2
x
2
y
2
2) Normal ve Teğetsel Koordinatlar :
1)
F ma
t
2)
t
at v s
F
F
n
an
v2
man
2
s
F F
2
t
2
n
a at an
2
2
3) Polar Koordinatlar :
1)
F
r
2)
mar
a 2r r
ar r r 2
F
F ma
F F
2
r
a ar a
2
2
2
Uzayda Eğrisel Hareket
1) Kartezyen Koordinatlar :
1)
F
x
2)
max
ax vx x
F
y
3)
may
a y v y y
F
z
az vz z
F F F
F
2
2
x
a ax a y az
2
y
maz
2
z
2
2) Silindirik Koordinatlar :
1)
F
r
2)
mar
3)
a r 2r
ar r r 2
F
F ma
2
r
a ar a az
2
2
2
z
maz
az vz z
F F F
2
F
2
z
2
3) Küresel Koordinatlar :
1)
F
R
maR
2)
F ma
3)
F ma
R cos 2 2 R2
aR R
a R cos 2R cos 2R sin
a R 2R R cos sin 2
F F F F
2
2
R
a aR a a
2
2
2
2