ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
EELP212
DERS – 05
Mayıs 10
Özer ŞENYURT
1
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
BĐR FAZLI MOTORLAR
Bir fazlı motorların çeşitleri
Yardımcı sargılı motorlar
Ek kutuplu motorlar
Relüktans motorlar
Repülsiyon motorlar
Üniversal motorlar
Özer ŞENYURT
Mayıs 10
2
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Özer ŞENYURT
Mayıs 10
3
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Bir Fazlı Yardımcı Sargılı Motorlar
Bir fazlı endüksiyon motorlarının en çok kullanılan tipidir. Stator, rotor, gövde
ve kapaklardan oluşur.
Stator: Üç fazlı asenkron motor statoruna benzer. Stator oluklarına 90
derece faz farklı olarak ana sargı ve yardımcı sargı yerleştirilmiştir.
Kalın kesitten çok sarımlı ana sargı stator oluklarının 2/3’ünü kaplarken,
yardımcı sargı ince kesitten az sarımlıdır ve stator oluklarının 1/3’ünü kaplar.
Rotor: Genel olarak sincap kafesli yapıdadır. Kısa devre çubukları alüminyudan
yapılmıştır.
Gövde ve Kapaklar: Küçük güçlü motorlarda gövde düz yüzeyli, orta güçlü
motorlarda çıkıntılı yüzeyli olarak yapılırlar.
Özer ŞENYURT
Mayıs 10
4
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Yardımcı Sargının Görevi
Bir fazlı asenkron motorlarda yalnız bir sargı ile döner alanın elde edilmesi
olanaksızdır. Dönen alanın oluşturulması için ana sargıya paralel yardımcı sargı
yerleştirilir. Bir fazlı uygulanan gerilim ana sargı ve yardımcı sargıda aynı fazda
manyetik alan oluşturur. Bu da dönen alanın oluşması için yeterli değildir.
Faz farklı bir alan (dönen alan) oluşturulması için yardımcı sargı devresine seri
bir kondansatör bağlanır.
Özer ŞENYURT
Mayıs 10
5
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Bir fazlı yardımcı sargılı motorun çalışması
Stator oluklarına 90 derece faz farklı
olarak yerleştirilen ana sargı ve yardımcı
sargılar ile iki faz elde edilmiş olur. Böylece
dönen alan oluşturulur.
Stator alanı içindeki rotor kısa devre
çubuklarında dönen alanın etkisi ile emk
indüklenir. Böylece rotor kısa devre
çubuklarından geçen kısa devre akımları
rotor manyetik alanını meydana getirir.
Rotor dönen alanın yönünde dönmeye başlar.
Özer ŞENYURT
Mayıs 10
6
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Motor nominal devrine ulaştığında yardımcı
sargı devreden çıkarılmalıdır. Đnce kesitli az
sarımlı olduğundan devrede kalırsa sargı aşırı
ısınarak yanar.
Yardımcı sargıyı devreden ayırma yöntemleri
o Yardımcı sargıyı merkezkaç anahtarı
ile devreden ayırma
o Yardımcı sargıyı paket şalter ile
devreden ayırma
o Yardımcı sargıyı manyetik şalterle
devreden ayırma
o Yardımcı sargıyı elektronik yol verme
rölesi ile devreden ayırma
Özer ŞENYURT
Mayıs 10
7
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Yardımcı sargılı asenkron motorların çeşitleri
Kalkış kondansatörlü yardımcı sargılı asenkron motor,
Daimi kondansatörlü yardımcı sargılı asenkron motor,
Kalkış ve daimi kondansatörlü yardımcı sargılı asenkron motor,
Özer ŞENYURT
Mayıs 10
8
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Yardımcı sargılı asenkron motorların devir yönü değiştirilmesi
Bir fazlı yardımcı sargılı asenkron motorların devir yönünü değiştirmek için
ana sargı veya yardımcı sargıdan birinin uçlarının yer değiştirilmesi
gerekmektedir.
Yardımcı sargılı asenkron motorların devir sayısı ayarı
Bir fazlı yardımcı sargılı asenkron motorların devir sayısını değiştirmek
için devir sayısı formülüne göre kutup sayısını veya frekansı değiştirmek
gerekir.
nr =
60. f
(1 − s )
P
Uygulanan gerilimi değiştirmek suretiyle devir sayısı değiştirildiğinde
momentte azalacaktır.
Özer ŞENYURT
Mayıs 10
9
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
ÜNĐVERSAL MOTORLAR
Stator ve rotor manyetik gövdeleri sac paketlerden oluşan alternatif akım
seri motoru hem alternatif hem de doğru akım ile benzer karakteristik
özellikler göstererek çalışabildiğinden bu motorlara üniversal motorlar denir.
Aynı zamanda kutup ve endüvi sargıları birbirine seri olarak bağlanan seri
motorların yapı ve çalışma karakteristiklerini taşıdığı için üniversal seri motor
da denir.
Özer ŞENYURT
Mayıs 10
10
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Üniversal Motorların Özellikleri
o
Üniversal motorlar 1/500 HP ile 2/3 HP arasında çok küçük
güçte imal edilir.
o
Kalkınma ve döndürme momentleri yüksektir.
o
Devir sayıları yükle değişir.
o
Boştaki devir sayıları çok yüksektir.
o
Devirleri 15000 - 20000 d/d’ya kadar çıkarılabilir.
o
Üniversal motorlar alternatif akım ile çalıştırıldığı zaman doğru
akıma göre devir sayısı - yük karakteristiği düşüktür.
Özer ŞENYURT
Mayıs 10
11
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Üniversal motorların yapısı
Üniversal motorların yapısında hem D. C. de hem de A. C. de çalışma özelliğini
gösterebilmesi için; stator (endüktör), rotor (endüvi)nin yanında kolektör ve
fırçaları bulunmaktadır.
Üniversal motorların yapısı:
1 - Endüktör ( stator)
2 - Endüvi ( rotor )
3 - Kolektör
4 - Fırçalar
5 - Yataklar ve diğerleri
Özer ŞENYURT
Mayıs 10
12
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Üniversal Motorların Çalışma Prensibi
Hem DC’de hem de AC’de çalışma özelliğini gösterdiğinden AC çalışma özelliğini
incelediğimizde çalışma prensibi anlaşılacaktır. Üniversal motorlara bir fazlı
alternatif gerilim uygulandığında statordaki (kutup) sargılarından ve rotordaki
(endüvi) sargılarından akım geçer. Bu akım, kutup sargılarında manyetik alan
meydana getirirken endüvi sargılarından da geçer
Đndüksiyon prensibine göre
üniversal motorlarda da meydana
gelen kutup sargılarındaki manyetik
alan içerisinde bulunan endüvi
sargılarından akım geçtiği için
endüvi iletkenleri, manyetik alanın
dışına doğru itilir. A.C gerilim
uygulanmaya devam ettiği müddetçe
de motor çalışmaya devam eder.
Özer ŞENYURT
Mayıs 10
13
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
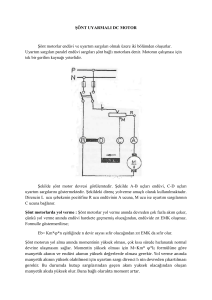
A noktasını (+) B noktasının (-) olduğunu kabul edersek: Endüvi
sargılarından ve kutup sargılarından bir yönde akım geçer (Sağdan
sola doğru).Kutup sargılarındaki kutuplaşma, üstteki N ile alttaki S
ile olur. Endüvide N kutbunun altındaki iletkenlerden geçen akım bir
yönde (bizden karşıya doğru (+) iken S kutbunun üstündeki
iletkenlerden geçen akım yönü ise ters yönde (karşıdan bize doğru
(- )’dir.
Böylece N kutbunun altındaki endüvi sargıları sağdan sola doğru
itilirken, S kutbunun üstündeki sargılar soldan sağa doğru itilirler.
A noktasının (-) B noktasının (+) olduğunda ise kutup sargılarından ve
endüviden geçen akım yönleri de değişir (soldan sağa doğru).
"Hem kutupların yeri değiştirilip hem de endüvi sargılarından geçen
akım yönleri değiştirilirse endüvinin dönüş yönü değişmez"
prensibiyle endüvi dönüş yönü aynı şekilde sağdan sola doğrudur.
Böylece alternatif akımın pozitif ve negatif yarım periyotlarında
kolektör ve fırça yardımıyla kutuplardan geçen akım yönleri
değiştiği anda endüviden geçen akım yönünde değişmesi sağlanmakta
ve motorun bir yönde sürekli dönmesi sağlanmaktadır.
Özer ŞENYURT
Mayıs 10
14
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Devir Sayısı Ayarı
n
: Devir sayısı (d/dk)
U
: Uygulanan gerilim (volt)
La
: Motordan geçen akım (amper)
Ra
: Endüvi direnci (ohm)
Rs
: Seri endüktör direnci (ohm)
K
: Sabit sayı
Ø
: Manyetik akım (maxwell)
n=
U − Ia(Ra + Rs )
k .φ
Devir sayısı formülü incelediğimizde Ra, Rs, la, K’nin normalde sabit olduğunu
kabul edersek yük altında çalışan bir üniversal motorunun devir sayısının (n),
motora uygulanan gerilim (U) ile manyetik akıya(Ø) bağlı olduğu görülmektedir
Devir Yönünün Değiştirilmesi
Üniversal motorların devir yönünün değiştirilmesinde iki metot kullanılır:
l-Endüvi sargılarının uçlarını yer değiştirerek
2-Endüktör sargılarının uçlarını yer değiştirerek
Ancak her ikisini de aynı anda değiştirdiğimiz zaman üniversal motorun devir
yönü değişmez.
Mayıs 10
Özer ŞENYURT
15
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ
Kaynaklar:
Elektrik Motorları ve Sürücüleri Adem ALTUNSAÇLI
Elektrik Makineleri
Özer ŞENYURT
Mayıs 10
16