Uploaded by
kralpubg
DC Machines - Electric Motors

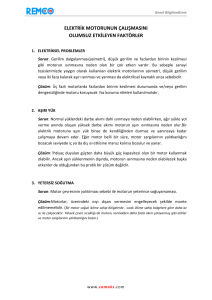
DOĞRU AKIM MAKİNALARI YAPISI: 1. Endüvi (Rotor): Doğru akım makinasının dönen kısmıdır. Endüvi sargılarının uçları, bakır dilimlerinden yapılmış olan ve üzerine fırçaların temas ettiği kısma (kolektöre) bağlanmıştır. Doğru akım generatörlerinin endüvi sargılarında alternatif gerilim endüklenir. 2. Gövde (Stator): Doğru akım makinesinin duran kısmı olan stator, karkas ve bunun üzerine yerleştirilen ana ve yardımcı kutuplardan oluşur. Ana kutuplar üzerine uyarma sargıları yerleştirilmiştir ve bu sargılar doğru akımla beslenir. Küçük güçlü d.c. makinalarda statorda uyarma sargıları yerine daimi mıknatıslar kullanılır. 3. Kollektör ve Fırçalar: Kollektör, bakır levhalardan meydana gelir. Levhalar arası mika ile yalıtılır ve makine mili üzerine monte edilir. Endüvide üretilen alternatif gerilim, kollektör tarafından doğrultulur ve kollektör üzerine kayarak temas eden fırçalar yardımıyla dış devreye iletilir. 4. Yatak, Kapak ve Diğer Parçalar: Gövde ve kapaklar motoru dış etkilere karşı korumak için alüminyum, demir ya da demir alaşımından üretilir. Rotorun stator içinde merkezi olarak yataklanması görevini ise kapaklar yapar. Doğru Akım Makinasının Çalışma Prensibi N Armature coil, N turns -a Carbon Brush Rotation Copper Commutator segments + a S Uyarma sargısından geçen doğru akım bir uyarma alanı oluşturur. Ayrıca kollektörün etkisiyle fırçalardan doğru akım geçince endüvide de uyarma akısı eksenine dik bir alan oluşur. Bu iki alanın etkisiyle doğru akım makinasında, motor olarak çalışmada, dönüş yönünde bir moment oluşarak mekanik güç elde edilir. DC Makinanın Uyartımına Göre Sınıflandırılması 1. Daimi Mıknatıslı DC Makina 2. Uyarma Sargılı DC Makine a) Serbest Uyartımlı b) Kendi Kendine Uyartımlı i) Serbest Uyartımlı ii) Şönt Uyartımlı iii) Seri Uyartımlı iv) Kompund Uyartımlı C Rşönt=Rfd D Ifd + DC Motor Vfd - V Rfd Iş + V + Serbest Uyarmalı DC Motor - Ea + - - Ra DC Motor Ra Ea + Ia Ia Ifd - Şönt Uyarmalı DC Motor C C Rşönt=Rfd D Ifd E Ra DC Motor Rşönt=Rfd D Ia Ra DC Motor Rs F + Ea - Ia Rs + Iş Ea Ea E Rs - F F + + V - Seri Uyarmalı DC Motor - Ra DC Motor E Iş=Ia + Iş Ifd V - a) Uzun şönt uyarma + V - b) Kısa şönt uyarma Kompund Uyarmalı DC Motor Doğru Akım Motorunda Motorun Dönüş Yönünün Değiştirilmesi: DC motorun devir yönünü değiştirmek için; endüvi veya uyarma sargılarından geçen akımın yönünü değiştirmek gerekir. Hız ayarı DC motorun devir sayısı, endüvi gerilimi ve uyarma sargısının oluşturduğu manyetik akıya bağlıdır. Sabit mıknatıslı DC motorda uyarma akısı ayarlanamayacağı için, bu tip motorların hız ayarı endüvisine uygulanan gerilimin ayarlanması ile gerçekleştirilir. Kendi kendine uyarmalı DC motorlarda ise, endüvi gerilimi ayarlanarak hız kontrolü yapılabileceği gibi tercih edilen hız kontrolü, uyarma alanın değişimi sonucu yapılan kontroldür. Bunun için, uyarma sargısına uygulanan gerilim bir reosta (ayarlı direnç) veya güç elektroniği devresi ile ayarlanmaktadır. ASENKRON MOTORLAR Asenkron motorlar AC motorlar olup 1 fazlı veya 3 fazlı olarak imal edilebilmektedir. Sanayide kullanılan motorlar ise 3 fazlı motorlardır. 3 faz arasındaki 1200 elektriki faz farkı kullanılarak statorda döner alan elde edilerek, bu alan ile rotor iletkenlerinde gerilim endüklenmeleri oluşturulur. Böylece elde edilen rotor ve stator alanları arasındaki manyetik kuvvet sonucunda moment oluşur. Bu makina endükleme prensibine göre çalıştığından bu makinaya endüksiyon motoru adı da verilir. Yapısal olarak ikiye ayrılıp, sincap kafesli ve bilezikli tip olarak isimlendirilirler. Çalışma prensibi bakımından aralarında hiçbir fark yoktur. Sanayide kullanılan elektrik motorlarının yaklaşık %95’i sincap kafesli asenkron motordur. Bunun nedeni bu motorların yapısının basit oluşu nedeni ile maliyetinin ucuz olması ve bakıma ihtiyaç duymayışıdır. Yapısı 1. Stator Stator üç fazlı motorun hareket etmeyen kısmıdır. DC makinelerin uyarmasına benzer. Üç fazlı döner manyetik alan sargıları burada bulunur. 2. Rotor Üç fazlı motorların dönen kısmına rotor denir. Sincap kafesli ve sargılı(bilezikli) olmak üzere iki çeşidi vardır. Bunlar; 2.1. Sincap Kafesli 2.2. Bilezikli (Sargılı Rotorlu) Şebekeye Direkt Bağlantıları Yıldız Bağlantı Üç faz bobinleri ve Yıldız bağlantı Üç fazlı AC motor klemens kutusu ve yıldız bağlantısı Üçgen Bağlantı Üç faz bobinleri ve Üçgen bağlantı Üçgen bağlantı klemens kutusu Şebekeye Direkt Bağlı Asenkron Motorun Dönüş Yönünün Değiştirilmesi Motor dönüş yönünü değiştirmek için motora gelen herhangi iki fazın yerini değiştirmek yeterlidir. Motor Bilgi Levhaları Motor gövdelerinin üzerinde genellikle alüminyumdan yapılmış dikdörtgen şeklinde etiketler bulunur. Etiket üzerine silinmeyecek şekilde bazı bilgiler yazılmıştır. Bu bilgiler bize motor hakkında kapsamlı bilgiler verir. Etiketlerde bulunan bilgiler şunlardır: Kimlik numarası: Üretim seri numarasıdır. Örneğin No:22986 vb. Gövde tipi Motor tipi: Motor model tipidir. Örneğin A GM L4a , Typ Gm 200L vb. Fazı: Motorun kaç fazla çalıştığını gösterir. Örneğin 1 faz , 3 faz vb. Beygir gücü oranı (hp): Motor KW gücünün beygir gücü cinsinden karşılığını verir. Örneğin 0.55KW/5.5Hp Hızı (rpm): Motorun devir sayısını gösterir. Örneğin 1350d/d, 1120rpm , 2850U/min vb. Gerilim: Motorun normal çalışma gerilimini gösterir. Örneğim 380V, 220V vb. Akımı: Motorun normal çalışma akımıdır. Örneğin 3A, 5.7A, 4.2A vb. Frekans: Motorun çalışma frekansıdır. Örneğin 50 Per./sn,50Hz vb. Servis faktörü Çalışma periyodu: Motorun bağlantı şeklidir. Örneğin yıldız-üçgen İzolasyon sınıfı Ortam sıcaklığı: Motorun çalışma ortam ısısıdır. Örneğin 1200C, 1800C vb. Nema kodu Asenkron Motor Hız Ayarı (AC Sürücü) Günümüzde asenkron motorun hız ayarı motor sürücüleri ile gerçekleştirilmektedir. Sanayide devir sayısı kontrolü önemli olup sürücü kullanmak için 4 ana neden sunmaktadır. 1. Azalan bakım giderleri: Direkt yol verme ile karşılaştırıldığında mekanik ve elektriksel yüklenmeler minimuma iner ve bakım gerekliliği azalır. 2. Üretim artışı Gerektiğinde hızı nominal hızın üzerine çıkararak üretim artışına olanak sağlar. 3. Enerji tasarrufu Pompa ve Fan gibi bir çok uygulamada prosesin ihtiyacını karşılayan düşük hızlarda büyük miktarda enerji tasarrufu sağlar. 4. Kalite artışı Optimum proses kontrolü ile ürün kalitesi artar. AC Sürücünün Yapısı AC Sürücü 4 ana bölümden oluşur. 1. Doğrultucu: Genellikle 6 adet diyottan oluşan bir diyot köprüsü kullanılır. Görevi şebekeden gelen AC gerilimi doğru gerilime çevirmektir. 2. DC Bara DC bara invertere elektrik akışını sağlar. Görevi, ilk çalışmada kondansatörün şarjına yardımcı olmak ve doğrultucu çıkışındaki gerilimi filtre etmektir. 3. İnverter (Evirici) Çıkşı frekansı ve seviyesi V1...V6 anahtarlarıile kontrol edilir. Günümüz güç, yarıiletken teknolojisinde,( V1...V6) IGBT (Insulated Gate Bipolar Transistor) olarak kullanılır. 4. Elektronik Kontrol, İzleme ve Komütasyon Hızlı bir mikro işlemci içerir. Yazılımı ile inverterdeki yarı iletken anahtarların kontrolü gerçekleştirildiği gibi aynı zamanda devre üzerinde bulunan sensörler yardımı ile toplanan bilgiler sayesinde koruma, referans ve input/output işlemleri ile hız ve moment ayarı da burada gerçekleştirilir. Sürücü ile Proses Kontrolü