Ege Üniversitesi
Elektrik Elektronik Mühendisliği Bölümü
Kontrol Sistemleri II Dersi
Ball and Beam Deneyi
..../…../2015
1) Giriş
Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball and beam)
sistemini kontrol etmektir. Kontrolün temel amacı topu istenilen referans noktasında hareketsiz
tutabilmektir. Bu deneyde yapılacak işlemler aşağıda sıralanmıştır;
Ball and Beam sisteminin matematiksel modelinin çıkarılması
Pole placementyönteminin kullanılması
Matlab-Simulink yardımıyla gerçek zamanlı sistem kontrolü
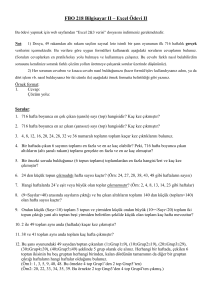
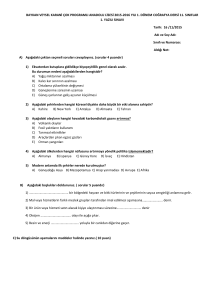
Şekil 1 Ball and Beam sistemi
Ball and beam sisteminde çubuk üzerinde tek eksenli hareket eden metal bir top
bulunmaktadır. Çubuk iki parçadan oluşmaktadır. Bir parçası direnç etkisi gösteren karbon filmdir
(siyah taraf). Diğer taraf ise metal iletkendir. Top iki parça arasında iletkenlik sağlamakta ve ölçülen
direnci değiştirmektedir. Bu sayede topun pozisyonu ölçülebilmektedir. Çubuğun hareketi SRV02 ile
sağlanmaktadır. Dişliye bağlı olan kaldırma kolu dişlilerin
açısı yapmasıyla h kadar
yükselmekte/alçalmakta ‘dır. Çubukta oluşan eğim sayesinde top yuvarlanmaktadır. Sistemin amacı
topu yuvarlayarak hedeflenen referans noktasında getirmek ve bu noktada hareketsiz tutabilmektir.
Tablo 1 sistem parametreleri
K
Motor kalıcı hal kazancı
1.52 rad/(V.s)
Çubuğun uzunluğu
42.55cm
τ
Motor zaman sabiti
0.0211 s
Kaldırma kolu boyu
2.54cm
Topun kütlesi
0.064 kg
Topun yarıçapı
1.27cm
Dişli açısı
Topun ataleti
0.0413
Çubuk eğimi
Yer çekim ivmesi
9.81
/
h
x
Yükseltme miktarı
Topun konumu
2) Sistem Modeli
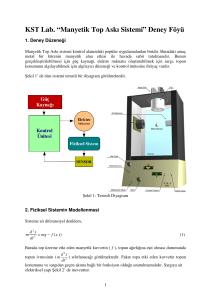
Sistem iki bölümde modellenebilir. Birinci parça motorun hareket modeli ( ( )), ikinci parça
ball and beam sistem modelidir ( ( )).
Şekil 2 Srv02 ve ball-beam sistemi
SRV02 motor bloğunun transfer fonksiyonu aşağıdaki gibi verilmiştir.
Ball and beam sistemi ise Newton’un hareket kanununa göre çıkarılmaktadır.
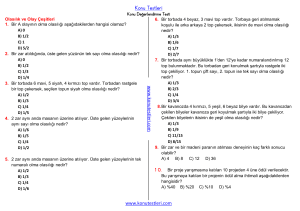
Şekil 3 top üzerindeki kuvvetler
Topun üzerinde yerçekiminin oluşturduğu kuvvet ve dönmeden dolayı ataletinin oluşturduğu
kuvvet vardır.
Topun ataletinden dolayı oluşan kuvvet sürtünme gibi topu yavaşlatıcı etki yapmaktadır.
Topun açısı γ ile gösterilmiştir.
ile topun açısal denklemini pozisyona bağlı olarak yazabiliriz.
Kuvvet denklemini tekrar yazarsak ikinci dereceden doğrusal olmayan sistem denklemini
bulmuş oluruz.
Bulduğumuz denklem α açısına bağlıdır. Fakat bu açıyı sistemde ölçemiyoruz. Yerine θ açısını
ölçebiliyoruz. Sistem geometrisinden yararlanarak α ‘yı θ ya çevirebiliriz.
Kalıcı halde θ açısı sıfır derce olacağı için sistemi θ=0 civarında doğrusallaştırarak (
sistemin doğrusal modeli elde edilir.
Ön
çalışma
1
)
Ball and Beam sisteminin doğrusal hareket denklemlerini kullanarak parametrik olarak trasfer
fonksiyonunu bulunuz. Çözümünüzü “Çalışmalar” başlığındaki gerekli yere yazınız. Bulduğunuz
transfer fonksiyonundaki parametrelere tablo1 deki sayısal değerleri yazarak sonuçları aşağıda
verilen transfer fonksiyonuyla karşılaştırınız.
( )=
( )=
( )
=
( )
( )
=
( )
(
+ 1)
=
=
20.91
31.97
(0.0211 + 1)
3) Pole placement
Pole placement yönteminde sistemin kutuplarını istenilen yere taşıyacak feedback kazancı
hesaplanmaktadır. State feedback yapıldığı için sistemin bütün statelerinin ölçülmesi yada kestiriliyor
olması gerekir. Feedback kazancı matlabda “K = place(A,B,p)” komutuyla hesaplanabilir.
=−
Sistemin kutuplarının nereye yerleştirileceği tasarımcının kararına kalmıştır. Baskın kutuplar ikinci
derece sistemde aşağıdaki gibi seçilebilir. Baskın olmayan kutuplar ise baskın kutuptan daha uzağa
yerleştirilebilir.
( )=
…
+2
+
Oturma süresi 15s’den fazla olmayan ve %5’den fazla aşım yapmayan kutupların yerlerini bulup
feedback kazancını hesaplayınız.
Ön
çalışma
2
Kontrolsüz sistemin ve kontrol edilmiş sistemin root locus diyagramlarını ve adım cevaplarını
çiziniz. Sonuçlarını “çalışmalar” başlığındaki gerekli yere yazınız.
4) Simulasyon Çalışması
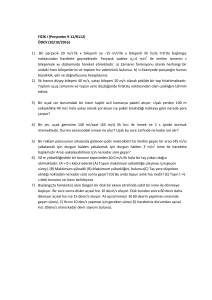
bb_file_sim.slx (simulink dosya uzantısı eski sürümler için *.mdl yeni sürümler için *.slx ‘dir. )
dosyası üzerinde “feedback gain” bloğu içine hesapladığınız K katsayıları yazınız. (köşeli parantez içinde
yazmayı unutmayınız.) Simülasyonu çalıştırmadan önce kullanılacak parametrelerin workspace’de
bulunması gerekiyor. Bunun için bb_setup.m dosyasını çalıştırmayı unutmayınız.
Şekil 4 "bb_file_sim" simulasyon dosyası
Ön
çalışma
3
bb_setup.m dosyasının sonunda pole placement katsayısını hesaplamanız gerekmektedir.
Gerekli kodu yazarak K katsayılarını burada bulabilirsiniz. Bulduğunuz K katsayılarını simulasyonda
deneyiniz. Hedeflenen kontrol parametrelerini karşılayıp karşılmadağını gözlemlemeyiniz ve
simülasyon sonuçlarını “çalışmalar” başlığındaki gerekli yere yazınız.
5) Laboratuvar Çalışması
Ön çalışmada bb_file_sim.slx dosyası üzerinde yaptığınız işlemi bb_file_real.slx dosyası üzerinde
tekrarlayınız. Bu dosya Quanser Q2 DAQ kartı ile sinyal iletişimde bulunmaktadır. Simulink ile Quarc
gerçek zamanlı sistem kontrolü hakkında dikkat edilmesi gereken bilgiler “Quarc-Ekler” kısmında
bulunmaktadır.
Deney
çalışması
1
Ön çalışma 3 de kullandığınız K feedback gain için gerçek zamanlı kontrolü tekrarlayınız ve
sonuçlarınızı “çalışmalar” başlığındaki gerekli yere yazınız.
Gerçek sistemde yaşanabilecek kararsızlıklardan dolayı daha az aşım sağlamak için oturma
süresini uzatarak yeni katsayılar hesaplayıp sistemi çalıştırınız. Elde ettiğiniz sonuçları “çalışmalar”
başlığındaki gerekli yere yazınız.
6) Sorular
a)
b)
c)
Çalışmalar
Ön çalışma 1
Ön çalışma 2
Root Locus
0.08
0.998
0.996
0.993
0.986
0.965
1.5
0.86
0.06
0.999
0.04
1
1
Imaginary Axis (seconds-1)
0.02
0
1.2
1
1
0.8
0.6
0.4
0.2
0.5
-0.02
1
-0.04
0.999
-0.06
0
0.998
-0.08
-1.4
0.996
-1.2
-1
0.993
-0.8
-0.6
Real Axis (seconds -1)
0.986
0.965
-0.4
0.86
-0.2
0
0.2
0
5
10
15
20
25
30
Root Locus
1.5
0.08
0.998
0.996
0.993
0.986
0.965
0.86
0.06
0.999
0.04
1
1
Imaginary Axis (seconds-1)
0.02
0
1.2
1
1
0.8
0.6
0.4
0.2
0.5
-0.02
1
-0.04
0.999
-0.06
0
0.998
-0.08
-1.4
0.996
-1.2
-1
0.993
-0.8
0.986
-0.6
0.965
-0.4
0.86
-0.2
0
0.2
-1
0
5
10
15
20
Real Axis (seconds )
Ön çalışma 3
Feedback
kazançları
Ön kazanç
değeri (N)
Yeni kutupların
yerleri
Oturma
süresi
aşım
Satatelerin değişimini ve U kontrol sinyalini aşağıdaki grafiklere çiziniz.
ve
25
30
Deney çalışması 1
Feedback
kazançları
Ön kazanç
değeri (N)
Yeni kutupların
yerleri
Oturma
süresi
aşım
Satatelerin değişimini ve U kontrol sinyalini aşağıdaki grafiklere çiziniz.
Sorular
a)
b)
c)
ve