ANKARA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
YÜKSEK LİSANS TEZİ
TÜRKİYE’DE DÖVİZ KURU GEÇİŞİ: ŞOKLARIN LİNEER OLMAYAN
YAYILIMI
Keziban TEKİN
İSTATİSTİK ANABİLİM DALI
ANKARA
2008
Her hakkı saklıdır.
TEZ ONAYI
Doç. Dr. Yılmaz AKDİ danışmanlığında, Keziban TEKİN tarafından hazırlanan
“Türkiye’de Döviz Kuru Geçişi: Şokların Lineer Olmayan Yayılımı” adlı tez
çalışması 11/01/2008 tarihinde aşağıdaki jüri tarafından oy birliği ile Ankara
Üniversitesi Fen Bilimleri Enstitüsü İstatistik Anabilim Dalı’nda YÜKSEK LİSANS
TEZİ olarak kabul edilmiştir.
Danışman
: Doç. Dr. Yılmaz AKDİ
Jüri Üyeleri:
Başkan: Prof. Dr. Hakan BERUMENT, Bilkent Üniversitesi İktisadi İdari ve Sosyal
Bilimler
Fakültesi İktisat Bölümü
Üye: Yrd. Doç. Dr. Halil AYDOĞDU, Ankara Üniversitesi Fen Fakültesi İstatistik
Bölümü
Üye:. Doç. Dr. Yılmaz AKDİ, Ankara Üniversitesi Fen Fakültesi İstatistik
Bölümü
Yukarıdaki sonucu onaylarım.
Prof. Dr. Ülkü MEHMETOĞLU
Enstitü Müdürü
ÖZET
Yüksek Lisans Tezi
TÜRKİYE’DE DÖVİZ KURU GEÇİŞİ: ŞOKLARIN LİNEER OLMAYAN YAYILIMI
Keziban TEKİN
Ankara Üniversitesi
Fen Bilimleri Enstitüsü
İstatistik Anabilim Dalı
Danışman: Doç. Dr. Yılmaz AKDİ
Döviz kuru geçişi ile bir birim şokun genel fiyat seviyesine nasıl geçtiği araştırılır. McCarthy(1999) bazı
gelişmiş ülkeler için toplam seviye üzerindeki döviz kuru geçişini araştırmıştır. Analiz edilen ülkelerin
çoğunda, tüketici fiyatları için döviz kuru geçişi tutarlı bulmuştur. Gelişmiş ekonomiler üzerinde 43
ampirik çalışma Menon(1995a) tarafından sunulmuştur. Bu çalışmaların çoğunda döviz kuru geçişinin
tamamlanmamış olduğu gözlenmiştir. Ayrıca bazı çalışmalarda, geçişin asimetrik olduğu bulunmuştur.
Geçişin asimetrik olması,
döviz kuru artışları ve azalışları süresince, geçiş kurunun farklı olması
anlamına gelir. Döviz kuru geçişinin asimetrik veya tamamlanmamış olabileceği Menon (1995a) ve
McCarthy(1999) tarafından gösterilmiştir. Hem süre hem de büyüklük olarak döviz kuru değişimlerinin
fiyatlara etkisini tespit etmek için vektör otoregresif(VAR) metodolojisi kullanıImaktadır(McCarthy,
1999)). Fiyatlardaki azalma seviyesi, geçiş mekanizması için önemlidir. Mart 2003’ ten itibaren ABD
Dolarındaki artış trendinin enflasyon üzerinde çok fazla etkisinin olduğunu söylemek zordur. Bundan
dolayı, artış üzerindeki azalma etkisinde asimetriklik bulunabilir. Asimetrinin bir türü ABD Dolarındaki
artışa karşı azalmadır. Asimetri sıfır etrafında olmayabilir fakat sıfıra yakın pozitif bir sayı etrafında
olması beklenmektedir. McCarthy(1999) tarafından önerilen metod, eşik seviyesini tespit etmek için
kullanılan standart bir yöntemdir.
Bu çalışmada, Türkiye’deki, genel fiyat endeksi ve döviz kuru serileri için Berument (2007) tarafından
önerilen VAR modeli göz önüne alınarak, döviz kuru geçişkenliğinin Balke (2000) tarafından önerilen
aralık tarama yöntemi ile hangi noktadan sonra etkili olduğunu araştırılacaktır.
Bu çalışmanın amacı; Balke(2000) aralık tarama yöntemini kullanarak model parametrelerini tahmin
etmek ve döviz kuru geçişindeki asimetriyi incelemektir.
2008, 54 sayfa
Anahtar kelimeler: Döviz Kuru Geçişi, Eşik Vektör Otoregresif (TVAR)
i
ABSTRACT
Master Thesis
EXCHANGE RATE PASS-THROUGH IN TURKEY: NONLINEAR PROPAGATION OF
SHOCKS APPROACH
Keziban TEKİN
Ankara University
Graduate School of Natural and Applied Sciences
Department of Statistics
Supervisor: Assoc. Prof. Dr. Yılmaz AKDİ
The exchange rate pass through investigates how a one-unit shock is transmitted to general price level.
McCarthy(1999) presents a comprehensive study of exchange rate pass through on the aggregate level for
a number of industrialised countries. In most of the countries analyzed, the exchange rate pass through to
consumer prices is found to be modest. Menon(1995a) presents an overview of 43 empirical studies on
industrialised economies. The majority of these studies conclude that exchange rate pass-through is
incomplete. Some studies have also found pass through to be asymmetric, which implies that the rate of
pass-through is different during exchange rate appreciations and depreciations. The empirical evidence
reported suggests that exchange rate pass through might be asymmetric or incomplete(Menon(1995a) and
McCarthy(1999)). Most of the time these studies employ the VAR methodology to capture the effect of
exchange rate innovation to prices for both its magnitude and duration (McCarthy, 1999). The level of
depreciation might be crucial for the transmission mechanism. The current trend of US dollar appreciation
since March of 2003 did not bring negative inflation. Therefore there might be asymmetry of the effect of
depreciation on appreciation. One type of asymmetry is depreciation versus appreciation US dollar.
However, the asymmetry may not be around zero but it might be around a positive number.
In this study, we will consider the model proposed by Berument(2007) for general price index and
exchange rate series and try to investigate the point of exchange rate pass through. Berument(2007)
assumes directly that there is a direct stable relationship between the price index and exchange rates.
Here, we will try to investigate the break point where this relationship is valid by using Balke’s grid
search method.
The purpose of this study to extend the VAR model of Berument(2007) for Turkey by using grid search
method of Balke(2000), estimate the threshold model parameter and assess the asymmetry of the
exchange rate pass- through.
2008, 54 pages
Key Words: Exchange Rate Pass-Through, Threshold Vector Autoregression (TVAR)
ii
TEŞEKKÜR
Çalışmalarımın her aşamasında bilgi ve yardımlarını esirgemeyerek gelişmeme katkıda
bulunan Ankara Üniversitesi Fen Fakültesi İstatistik Bölümü öğretim üyelerinden
danışman hocam Doç. Dr. Yılmaz AKDİ’ye çok teşekkür ederim. Tez konumun
oluşmasında ve ekonomi alanında olan eksikliklerimi tamamlamamda sabırla yardım
eden, akademik hayatta ilerlememi kolaylaştıran Bilkent Üniversitesi İktisadi İdari ve
Sosyal Bilimler Fakültesi İktisat Bölümü öğretim üyelerinden değerli hocam Prof. Dr.
Hakan BERUMENT’e teşekkürlerimi sunarım. Tezimin analizlerinin sonuçlanmasında
ve ekonomik açıdan anlam kazanmasında büyük katkıları olan Gazi Üniversitesi
İktisadi ve İdari Bilimler Fakültesi İktisat Bölümü öğretim üyelerinden Yrd. Doç. Dr.
Zeynel Abidin ÖZDEMİR’e değerli katkılarından dolayı teşekkür ederim.
Çalışmalarım süresince her zaman yanımda olan ve desteklerini hiçbir zaman
esirgemeyen değerli aileme en derin duygularımla sonsuz teşekkürlerimi sunarım.
Bu tez çalışması,
“Türkiye’de Döviz Kuru Geçişi: Şokların Lineer Olmayan
Yayılımı(106K378)” konulu proje kapsamında TÜBİTAK tarafından desteklenmiştir.
Keziban TEKİN
Ankara, Ocak 2008
iii
İÇİNDEKİLER
ÖZET……………………………………………………...………………………….…i
ABSTRACT………………………………………….…………………………………ii
TEŞEKKÜR……………………………………………………………………………iii
SİMGELER DİZİNİ………………………………………………...…...……………v
ŞEKİLLER DİZİNİ……………………………………………..……….……………vi
ÇİZELGELER DİZİNİ………………………………………………………………vii
1. GİRİŞ…………………………………………………………………………….…..1
2. DÖVİZ KURU GEÇİŞİ……………………………………………………………..2
3. LİNEER ZAMAN SERİLERİ…………………………………………………..….6
3.1 Zaman Serisi………………………………………………………………….….…6
3.2 Durağanlık…………………………………………………………………….…....7
3.3 Durağan Zaman Serileri…………………………………………………………...9
3.3.1 Hareketli ortalama serileri………………………………………………..…......9
3.3.2 Otoregresif zaman serileri………………………………………………..…....12
3.3.3 Kısmi otokorelasyon fonksiyonu…………………………………………..…...16
3.3.4 Otoregresif hareketli ortalama serileri……………...………………….......….20
3.4 Öngörü………………………………………………………………………..…....24
3.5 Durağan Olmayan Zaman Serileri………………………………………………29
3.5.1 Dickey-Fuller birim kök testi……………………………………………..……31
3.5.2 Genişletilmiş Dickey-Fuller birim kök testi………………………….……..…33
4. VEKTÖR OTOREGRESİF MODELLER…………...…………………..………36
4. 1 Granger Nedensellik Testi ……………………….…………………….………..38
4. 2 Etki-Tepki Fonksiyonları ……………………….…………………….…………39
4. 3 Varyans Ayrıstırması ……………………….…………………………………...42
5. VEKTÖR OTOREGRESİF MODELLER YARDIMI İLE TÜRKİYE’DEKİ
DÖVİZ KURU GEÇİŞİ EŞİK DEĞERİNİN TESPİTİ………………………… 43
5.1 Metodoloji …………………………………………………………………………44
5.2 Veri ve Bulgular………………..………………………………………………… 45
6. SONUÇ……………..……………………………………………………………… 51
KAYNAKLAR ……………………………...………………………………………..52
ÖZGEÇMİŞ ……………………………...…………………………………………..54
iv
SİMGELER DİZİNİ
AR
Otoregresif Zaman Serileri
ARMA
Otoregresif Hareketli Ortalama Serileri
MA
Hareketli Ortalama Serileri
TEFE
Toptan Eşya Fiyatları Endeksi
TÜFE
Tüketici Fiyatları Endeksi
TVAR
Eşik Vektör Otoregresif
ÜFE
Üretici Fiyatları Endeksi
VAR
Vektör Otoregresif
WN
Beyaz Gürültü Süreci
v
ŞEKİLLER DİZİNİ
Şekil 3.1 MA(2) serisi için otokorelasyonlar ve kısmi otokorelasyonlar…………..…..18
Şekil 4.1 Doğrusal olmayan etki-tepki fonksiyonları…………………….………..…...40
Şekil 5.1 Büyüme oranının gecikmelerine etkisi………………...……………..………47
Şekil 5.2 Enflasyonun büyüme oranına etkisi……………………………….…………48
Şekil 5.3 Spreadin büyüme oranına etkisi……………………………….……………..49
Şekil 5.4 Kurdaki değişikliğin büyüme oranına etkisi………………….…….………..50
vi
ÇİZELGELER DİZİNİ
Çizelge 3.1 Sanayi üretim endeksi serisi birim kök testi……..………………….……..34
Çizelge 3.2 Sanayi üretim endeksi fark serisi birim kök testi……..……………..…… 34
Çizelge 5.1 Eşik değerin tahmini ve test istatistikleri ………………...……...………..46
vii
1.GİRİŞ
Bazı gelişmiş ülkeler için genel fiyat seviyesi üzerindeki döviz kuru geçişi McCarthy(1999)
tarafından araştırılmıştır. Analizleri yapılan ülkelerin çoğunda, tüketici fiyatları için döviz
kuru geçişi anlamlı bulunmuştur. Menon(1995a) ile gelişmiş ekonomiler üzerinde çeşitli
ampirik çalışmalar sunulmuştur. Hem süre hem de büyüklük olarak döviz kuru
değişimlerinin fiyatlara etkisini tespit etmek için vektör otoregresif(VAR) metodolojisi
kullanılmaktadır (McCarthy 1999). Fiyatlardaki azalma seviyesi, geçiş mekanizması için
önemlidir. Türkiye için Mart 2003’ten itibaren ABD Dolarındaki artış trendinin enflasyon
üzerinde çok fazla etkisinin olduğunu söylemek zordur. Bundan dolayı, artış üzerindeki
azalma etkisinde asimetriklik bulunabilir. Asimetrinin bir türü ABD Dolarındaki artışa
karşı azalmadır. Asimetri sıfır etrafında olmayabilir fakat sıfıra yakın pozitif bir sayı
etrafında olması beklenmektedir. Ayrıca McCarthy(1999) tarafından önerilen metod, eşik
seviyesini tespit etmek için kullanılan standart bir yöntemdir.
Döviz kurlarından fiyatlara geçiş etkisi yüksek olan ülkelerde, döviz kuruna dayalı istikrar
programlarının başarılı olma şansının yüksek olduğu geçmişte yapılan çalışmalarda
gösterilmiştir. Diğer yandan, geçiş etkisinin azalmış olması gerekliliği enflasyon
hedeflemesi uygulayacak ülkelerde geçerli olduğu vurgulanmıştır. Bulunan bu bulgular
yardımı ile Türk ekonomisi üzerinde döviz kurlarından fiyatlara geçiş etkisinin
incelenmesinin oldukça önemli olduğu görülmektedir.
1
2. DÖVİZ KURU GEÇİŞİ
Döviz kuru geçişi ile bir birim şokun genel fiyat seviyesine nasıl geçtiği araştırılır. Döviz
kurlarından fiyatlara geçiş asimetrik bir yapıya sahip olabilir. Geçişin asimetrik olması,
döviz kuru artışları ve azalışları süresince, geçiş kurunun farklı olması anlamına
gelmektedir. Bir ekonominin temel makro ekonomik değişkenleri üzerindeki döviz kuru
geçişi oldukça etkilidir. Bazı ekonomik terimler aşağıda açıklanmaktadır1.
Döviz kuru, bir ülkenin ulusal para biriminin yabancı para birimleri cinsinden değerini
göstermektedir. Döviz kurlarının belirlenmesinde kullanılan sistemlere de döviz kuru
sistemleri adı verilmektedir. Döviz kuru sistemleri, döviz kurlarının nasıl belirleneceği,
kurlarda serbestçe ya da resmi kararla hangi ölçülerde değişme olup olmayacağı gibi
konularla ilgili kurallar topluluğu olarak açıklanabilir. Döviz kuru sisteminin seçimi
oldukça önemlidir. Çünkü döviz kurundaki değişiklikler cari işlemler dengesini büyük
ölçüde etkilemektedir.
Son yıllarda yükselen piyasa ekonomilerinde sıklıkla bankacılık ve döviz krizleri
yaşanmaktadır. Yaşanan döviz krizlerinden dolayı gelişmekte olan ülkelerde büyümenin
yavaşladığı neredeyse kesildiği görülmektedir. Döviz kurunun ithalat, ihracat, üretim ve
istihdam üzerinde de önemli etkilerinin olduğu bilinmektedir. Aslında döviz kuru ve
enflasyonla işsizlik arasında merkezi bir ilişki olduğu literatürde tartışılmaktadır.
Endeks, belirli bir olaya ait sayısal verilerde meydana gelen oransal değişimin göstergesi
olarak tanımlanabilir. Endeks yüzde değişimleri ifade eden bir sayıdır. Başlıca endeksler
fiyat endeksi, tüketici fiyatları endeksi(tüfe), toptan eşya fiyatları endeksi(tefe), üretici
1
Değişkenlerin
tanımlanmasında
http://analiz.ibsyazilim.com/sozluk/sozlukdefault.htm
ve
http://www.tcmb.gov.tr/yeni/gen_sek/sozluk.htm adreslerinden
ve T.C Başbakanlık Devlet İstatistik
Enstitüsü Tüketici Fiyatları Endeksi ve Üretici Fiyatları Endeksi Sorularla İstatistikler Dizisi, Şubat 2005 den
büyük ölçüde yararlanılmıştır.
2
fiyatları endeksi(üfe), sanayi üretim endeksi, hizmetler endeksi, mali endeks, ulusal 100
endeksi, ulusal 30 endeksidir. Bu endeksler aşağıda kısaca açıklanmaktadır.
Fiyat endeksi, seçilmiş mal ve hizmetlerin ortalama fiyatlarının belli bir döneme göre
değişimini gösterir. Başka bir ifade ile fiyat endeksi; malların belirli bir dönemdeki
fiyatlarını daha sonraki dönemlerdeki fiyatlara oranlayarak, fiyatlardaki artışın veya
azalışın göstergesi olarak açıklanabilir.
Endeks oluşturmak için ilgilenilen piyasaya göre (tüketici, üretici, ihracat, ithalat vb.) bir
mal ve hizmet sepeti oluşturulur. Burada seçilmiş maddelerin fiyatları dönemsel olarak
takip edilir. Fiyat endeksleri, fiyatlarının izlendiği mal ve hizmet piyasasına göre
isimlendirilir. Tüketici fiyatları endeksi, üretici fiyatları endeksi, ihracat fiyatları endeksi,
ithalat fiyatları endeksi örnek olarak gösterilebilir.
Bir ülkenin ekonomik yapısının belirlenmesinde, ekonomik kararlar alınmasında, kişilerin
satın alma gücünün tespitinde, ücret ve maaşların belirlenmesi gibi çeşitli konularda fiyat
endekslerine ihtiyaç duyulur.
Tüketici fiyatları endeksi, belirli bir dönemde hane halkları tarafından satın alınan mal ve
hizmetlerle belirlenen bir sepetin aylık dönemler itibariyle fiyat değişimini ölçer. Başka bir
ifade ile tüketici fiyatları endeksi; tüketiciler tarafından geniş ölçüde kullanılan malların
genel fiyat seviyelerindeki değişmeleri gösteren endekstir. Bu
tür endekslerin
düzenlenmesinde, tüketicilerin harcamalarını tahsis ettikleri her bir mal grubunun toplam
harcama içindeki ağırlıklarının belirlenmesi çok önemlidir. Tüketici harcamalarının büyük
bir kısmını oluşturan herhangi bir mal grubuna endeks içinde düşük bir ağırlık verilmesi, bu
mal grubunun fiyatlarındaki değişmelerin endekse daha küçük oranda yansımasına yol
açabilecek ve dolayısıyla, endeks rakamları, fiyatlar genel düzeyindeki gerçek artışları
yansıtmaktan uzak olabilecektir. Dolayısıyla mal ve hizmet sepetindeki her bir madde için
miktar ve kalite değişmeleri göz önüne alınarak endeksin sadece fiyat hareketlerini
3
yansıtması çok önemlidir. Türkiye’de tüketici endeksleri; geçinme endeksi, perakende fiyat
endeksi, tüketici fiyatları endeksi isimleri altında İstanbul Ticaret Odası, Türkiye İstatistik
Kurumu ve Hazine ve Dış Ticaret Müsteşarlığı tarafından düzenlenmektedir.
Toptan eşya fiyatları endeksi, paranın satın alma gücünde oluşan değişmelerin toptan eşya
fiyatlarına dayandırılarak endekse tabi tutulmasıdır. Toptan eşya fiyatları endekslerinde,
temel oluşturacak veriler, genellikle toptancılık yapanlardan, imalatçılardan elde
edilmektedir.
Üretici fiyatları endeksi, belirli bir referans döneminde ülke ekonomisinde üretimi yapılan
ve yurtiçine satışa konu olan ürünlerin, üretici fiyatlarını zaman içinde karşılaştırarak fiyat
değişikliklerini ölçen fiyat endeksidir. Üretici fiyatları, üretimde kullanılan her türlü
maddenin ve işgücünün maliyetinden etkilenmektedir.
Sanayi üretim endeksi, imalat sanayinde, madencilik, elektrik ve gaz endüstrilerinde
fiziksel üretim değerlerinin dönemsel olarak ölçülmesi şeklinde tanımlanabilir.
Mali endeks, mali sektörde yer alan şirketlerin hisse senetlerinin fiyatlarındaki değişmeleri
dikkate almak şartıyla hesaplanan hisse senetleri piyasası endeksidir.
Ulusal 100 endeksi, 1986 yılında 40 şirketin hisse senedi ile başlayarak zamanla sayısı 100
şirketin hisse senedi ile sınırlanan bileşik endeksin devamı niteliğindedir. Ulusal pazarda
işlem gören yatırım ortaklıkları hariç önceden belirlenmiş şartlar yanında sektörel temsil
kabiliyeti de göz önünde bulundurularak seçilmiş hisse senetlerinden oluşmaktadır ve
İMKB-30 da yer alan hisse senetlerini de kapsamaktadır.
Ulusal 30 endeksi, Vadeli İşlemler Piyasası’nda kullanılmak amacıyla oluşturulmuştur.
Yatırım ortaklıkları hariç ulusal pazarda işlem gören şirketlerden önceden belirlenmiş
4
şartlar yanında, piyasa değeri ve likiditesi yüksek olanlardan sektörel temsil kabiliyeti de
göz önünde bulundurularak seçilen 30 hisse senedinden oluşan endekstir.
Enflasyon, fiyatlar genel seviyesinin sürekli olarak yükselmesi nedeniyle paranın sürekli
olarak değer kaybetmesi durumudur. Başka bir ifadeyle tüketicilerin satın alma gücünü
yitirmesidir. Bir ekonomide bazı malların fiyatları artarken bazıları da düşmektedir.
Dolayısıyla, önemli olan ortalama fiyatların seyridir. Fiyat endeksleri yardımı ile ortalama
fiyatların seyri tespit edilebilir. Ayrıca enflasyonun hesaplanmasında seçilmiş mal ve
hizmetlerin ortalama fiyatlarının dönemsel değişimini gösteren fiyat endeksleri kullanılır.
Benzer şekilde enflasyon oranı da ülke genelindeki fiyat artışlarının ölçüsü olarak
kullanılan fiyat endekslerinden yararlanılarak bulunur. Enflasyon oranı, fiyat istikrarını
sağlamak için politika uygulayıcılarına yol gösterir.
Bir ekonomide var olan çeşitli piyasalar açısından bakılarak fiyatlar genel seviyesindeki
değişim oranı belirlenmek istenebilir. Tüketici, üretici, ihracat veya ithalat piyasalarında
fiyatlar genel seviyesindeki artış oranı bu piyasalara ilişkin enflasyon oranı olarak
nitelendirilebilir. Fakat kamuoyunda enflasyon oranı, tüketici veya üretici fiyatlarındaki
değişim oranı olarak alınmaktadır.
Bir ülkenin iç veya dış ilişkilerinden doğan ekonomik dengesizliklere şok adı verilir. Şoklar
dış kaynaklı olarak ortaya çıkıyor ise dışsal şok, iç kaynaklı olarak ortaya çıkıyor ise içsel
şok olarak adlandırılmaktadır. Ayrıca bir şokun yaşandığı seride artış meydana geliyorsa bu
şok pozitif şoktur, eğer ki seride azalış meydana geliyorsa negatif şoktur.
5
3. LİNEER ZAMAN SERİLERİ
3.1 Zaman Serisi
(Ω, U , P) bir olasılık uzayı, T de bir indis kümesi olmak üzere bir zaman serisi
Ω × T çarpım uzayından reel sayılara giden bir fonksiyondur. Yani, bir zaman serisi,
X (.,.) : Ω × T →
: ( w, t ) → X ( w, t ) = X t ( w) ≡ X t
(3.1.1)
şeklinde tanımlanan bir fonksiyondur ve her sabit t için X t ( w) bir rasgele değişkendir.
Her bir sabit w için, t nin reel değerli bir fonksiyonudur. Bu reel değerli fonksiyona zaman
serisinin bir yörüngesi denir. Gerçek hayatta görülen zaman serileri grafikleri aslında
zaman serisinin bir yörüngesidir.
Zaman serileri gözlem değerlerinin zamana göre dağılımını gösterir. Başka bir ifadeyle, bir
değişkenin belli zaman aralıklarında gözlenen değerlerinden oluşurlar. Bu bağlamda, döviz
kurlarındaki günlük değişimleri gösteren bir seri zaman seridir. Benzer olarak, aylara göre
bir firmanın ürettiği veya sattığı mal sayısından oluşan seriler de zaman serilerine örnek
gösterilebilir.
Günümüzde zaman serileri birçok alanda kullanılmaktadır. Özellikle istatistik ve
ekonometri gibi bilim dallarındaki uygulama alanları oldukça geniştir. Zaman serileri
yardımı ile geçmiş yıllara ait ekonomik verileri kullanarak gelecek yıllar hakkında
öngörüde bulunabiliriz. Ancak yapılan öngörülerin istatistiki anlamda güvenilir sonuçlar
vermesi için kullanılan zaman serilerinin durağanlığı sağlaması gerekmektedir. Dolayısıyla
zaman serilerinde durağanlık kavramı, en önemli kavramlardan birisidir. Aşağıdaki
bölümde durağanlık kavramı ve bu kavramın zaman serilerindeki önemi açıklanmaktadır.
6
3.2 Durağanlık
Zaman serileri teknikleri uzun dönem dengesinin oluşumunu ampirik yönden incelememize
olanak sağlar. Bu teknikler, dengenin sağlanıp sağlanmadığı, sisteme verilen şoklar
sonrasında ortaya çıkan sapmaların devamında sistemin uzun dönemde tekrar denge
düzeyine dönüp dönmeyeceği konusunda bilgiler sağlar. Ancak uzun dönem dengesi
incelenirken ele alınan değişkenlerin, kısa dönemde şoklardan etkilense dahi birkaç dönem
sonra bu şokların etkilerinden kurtularak tekrar eski denge düzeyine yönelen nitelikte
olmaları gerekir. Bu özelliğe sahip bir değişkene durağan zaman serisi adı verilir.
İstatistiksel açıdan açıklamak gerekirse, durağanlık kısaca şu şekilde tanımlanabilir:
Deterministik bir yapısı olmayan ve ‘ d ’ kere farkı alındıktan sonra ortalaması ve varyansı
sabit, doğrusal bir otoregresif hareketli ortalama(ARMA) süreci sergileyen bir seri
durağandır(Engle and Granger 1987). d inci dereceden durağan olan X t serisi sembolik
olarak X t ∼ I (d ) şeklinde ifade edilir.
Durağanlık, zaman serilerinde en önemli kavramalardan birisidir. İstatistiki sonuç
çıkarımlarının çoğunda serinin durağan olduğu varsayılır. Eğer seri durağan değil ise fark
alma gibi çeşitli teknikler kullanılarak seri durağan hale getirilir. Genel olarak iki çeşit
durağanlıktan söz edilir. Birincisi güçlü durağanlık ikincisi ise zayıf durağanlıktır.
Bir zaman serisinin
t1 , t 2 ,…, t n zamanlarındaki X 1 , X 2 ,…, X n rasgele değişkenlerinin
ortak olasılık dağılım fonksiyonu ile herhangi bir ötelemeyle elde edilen t1+ h , t 2+ h ,…, t n + h
zamanlarındaki X 1+ h , X 2+ h ,…, X n + h ∀ n, h, n + h ∈ T rasgele değişkenlerinin ortak
olasılık dağılım fonksiyonu aynı ise bu seriye güçlü durağandır denir. Başka bir ifadeyle,
T indis kümesi doğal sayılar kümesi olmak üzere, { X t : t ∈ T } bir zaman serisi olsun.
7
Eğer ∀ n, t ∈ T , her t1 , t 2 ,…, t n ∈ T ve t1+ h , t 2+ h ,…, t n + h ∈ T olmak üzere
her x1 , x 2 , …, xn ∈
FX 1 ,
X 2 , ... , X n
için
( x1 , x 2 , ... , x n ) = FX 1+ h ,
X 2 + h , ... , X n + h
( x1 , x 2,
... , x n )
koşulu sağlanıyorsa { X t : t ∈ T } zaman serisine güçlü durağandır denir.
Eğer
{ X t : t ∈T
} zaman serisi güçlü durağan ise bu ∀t i ∈ T ,
∀ n için
D
( X t1 ,
X t 2 , ... , X t n ) = ( X t1 + h ,
X t2 +h,
... , X t n + h ) şeklinde gösterilebilir.
Eğer { X t : t ∈ T } zaman serisi güçlü durağan ise bağımsız aynı dağılıma sahip rasgele
değişkenlerin bir dizisidir.
Pratikte serinin güçlü durağanlığını sağlatmak kolay değildir. Bunun yerine koşulların biraz
hafifletilmesi ile tanımlanan zayıf durağanlık veya kısaca durağanlık uygulama açısından
yeterli görülmemektedir.
Bir { X t : t ∈ T } zaman serisi eğer,
(i) E ( X t ) = µ
(ii) Cov ( X t , X s ) kovaryansı sadece t − s nin bir fonksiyonudur.
koşullarını sağlıyorsa, zaman serisine zayıf durağan, kovaryans durağan veya kısaca
durağandır denir.
8
Güçlü durağanlık ve zayıf durağanlık kavramları birbirlerini gerektirmez. Bazı durumlarda
bu geçişler olabilmektedir:
(i) { X t : t ∈ T } zaman serisi durağan ve normal dağılım varsayımı sağlanıyorsa bu
seri aynı zamanda güçlü durağandır.
(ii) { X t : t ∈ T } zaman serisi güçlü durağan ve E ( X t2 ) < ∞ koşulunu sağlıyorsa bu
seri aynı zamanda durağandır.
3.3 Durağan Zaman Serileri
3.3.1 Hareketli ortalama serileri (Moving average series, MA)
Ortalaması sıfır olan herhangi bir {et
: t ∈ T } zaman serisinin otokovaryans
fonksiyonu,
σ 2 , h = 0
γ e (h) =
0,
(3.3.1.1)
d .d .
şeklinde ise {et : t ∈ T } serisine bir Beyaz Gürültü (White Noise) serisi denir ve
et ∼ WN (0, σ 2 ) şeklinde gösterilir.
Eğer et ∼ WN (0, σ 2 ) ,
q sonlu bir doğal sayı olmak üzere q uncu dereceden hareketli
ortalama serisi,
q
X t − µ = et + ∑ β j et − j
( 3.3.1.2)
j =1
şeklinde verilir ve X t ∼ MA(q) şeklinde gösterilir.
9
Eğer X t ∼ MA(q) ise, serinin otokovaryans fonksiyonu aşağıdaki gibi hesaplanır. Ayrıca
serinin ortalamasının sıfır olduğu görülmektedir. Yani, E ( X t ) = µ dür. Ayrıca serinin
varyansı da,
q
q
Var ( X t ) = Var et + ∑ β j et − j = σ 2 ∑ β j2
j =1
j =0
(3.3.1.3)
dir.
Otokovaryans fonksiyonu ise β 0 = 1 olmak üzere,
q
q
j =0
i =0
γ X (h) = Cov( X t , X t + h ) = Cov(∑ β j et − j , ∑ βi et + h −i )
q
q
= ∑∑ β j β i Cov(et − j , et + h −i )
( 3.3.1.4)
j = 0 i =0
dir. Fakat,
σ 2
Cov(et − j , et + h −i ) =
0
,
,
j =i+h
d .d .
( 3.3.1.5)
olduğundan,
q− h
γ X ( h) = σ 2 ∑ β j β j + h
( 3.3.1.6)
j =0
dir. Yukarıdaki toplamın üst sınırının q − h olmasının nedeni; i + h nin alabileceği en
yüksek değerin q olmasıdır. Burada otokovaryans fonksiyonunun simetrik olması gerekir.
10
Sonuç olarak, q uncu dereceden bir hareketli ortalama serisi için otokovaryans fonksiyonu,
2 q −h
σ ∑ β j β j + h
γ X ( h) = j = 0
0
, 0≤h≤q
,
( 3.3.1.7)
d .d .
şeklinde yazılabilir. Buradan da otokorelasyon fonksiyonu,
−1
q −h
q 2
β j β j + h ∑ β j
, 0≤h≤q
ρ X (h) = ∑
j =0
j
=
0
0
,
d .d .
( 3.3.1.8)
şeklinde olacaktır. Görüldüğü gibi, hareketli ortalama serileri q sonlu olduğu sürece her
zaman durağandır.
Hareketli ortalama serileri her zaman durağandır. β j = ρ j , ρ < 1 olduğunda { X t : t ∈ T }
∞
zaman serisi, et ∼ WN (0, σ 2 ) iken X t = et + ∑ ρ j et − j şeklinde verilsin. ρ <1 olduğundan
j =φ
dolayı
E( X t ) = 0
∞
ve
γ X (h) = σ 2 ∑ ρ zj + h = ρ hγ X (0) = ρ h
j =0
σ2
1− ρ2
şeklinde
olup
{ X t : t ∈ T } zaman serisi durağandır. Bununla birlikte, eğer ρ = 1 ise γ X (h) tanımlı
değildir. Ayrıca, E ( X t ) değeri de hesaplanamaz. Dolayısı ile ρ = 1 olması durumunda seri
durağan değildir.
11
3.3.2 Otoregresif zaman serileri (Autoregressive time series, AR)
∞
Burada X t = et + ∑ α j et − j zaman serisini göz önüne alındığında bu seri,
j =1
∞
X t = et + ∑ α j et − j
( 3.3.2.1)
j =1
∞
α X t −1 = et −1 + ∑ α j et −1− j
( 3.3.2.2)
j =1
denklemlerinin yardımı ile
serisinden
elde
edilen
X t = α X t −1 + et şeklinde yazılabilir. Böylece MA(+ ∞ )
X t = α X t −1 + et
şeklinde
bir
seriye
ulaşılır.
Bu
seri,
( X t − µ ) = α ( X t −1 − µ ) + et veya X t = β 0 + β1 X t −1 + et şeklinde de yazılabilir. Görüldüğü
gibi bu seri basit doğrusal regresyon denklemine benzemektedir. Bu seri birinci dereceden
otoregresif zaman serisi olarak bilinmektedir.
AR(1) serisi, α < 1 olmak üzere X t = α X t −1 + et şeklinde verildiğinde,
E( X t ) = 0
Var ( X t ) = γ X (0) =
σ2
1−α 2
( 3.3.2.3)
γ X (0) = Var ( X t ) = Var (α X t + et ) = α 2Var ( X t ) + Var (et ) + 2α Cov( X t −1 , et )
= α 2γ X (0) + σ 2
ve h>0 için,
γ X (h) = Cov( X t , X t + h ) = Cov(α X t −1 + et , X t + h )
= α Cov( X t −1 , X t + h ) + Cov(et , X t + h )
12
( 3.3.2.4)
= α Cov( X t −1 , X t + h )
= αγ X (h − 1)
( 3.3.2.5)
şeklinde hesaplanmaktadır.
Böylece AR(1) serisi için Yule-Walker denklemleri,
γ X (0) = α 2 γ X (0) + σ 2
γ X (h) = αγ X (h − 1)
( 3.3.2.6)
şeklinde yazılır.
Yule-Walker denklemleri ile serinin varyansı ve otokovaryansı bulunur. Birinci denklem
kullanılarak serinin varyansı aşağıdaki şekilde hesaplanır.
σ2
Var ( X t ) = γ X (0) =
1−α 2
(3.3.2.7)
Serinin otokovaryans fonksiyonunu ise,
γ X (h) = αγ X (h − 1) = α (αγ X (h − 2)) = α 2γ X (h − 2) = ... = α hγ X (0)
γ X ( h) = α h
σ2
= α h γ X (0)
2
1−α
( 3.3.2.8)
şeklinde olduğu kolayca görülür. Buradan serinin otokorelasyon fonksiyonu,
ρ ( h) = α h
(3.3.2.9)
şeklinde olduğu açıktır.
13
Aslında, X t = α X t −1 + et şeklinde verilen bir zaman serisi MA(+ ∞ ) serisi olarak yazılabilir.
Β k X t = X t −k olmak üzere( Β gerileme operatörü veya backshift operatörü),
(1 − αΒ) X t = et ⇒ X t =
∞
∞
1
et = ∑ (αΒ) j et = ∑ α j et − j
(1 − αΒ)
j =0
j =0
( 3.3.2.10)
şeklinde yazılır. Yine dikkat edilirse bu geçiş ρ = 1 için geçerli değildir.
Otoregresif zaman serileri serinin şimdiki ve geçmiş değerleri ile beyaz gürültüden
etkilenir. Genel olarak, p inci dereceden bir otoregresif zaman serisi et ∼ WN (0, σ 2 ) bir
beyaz gürültü serisi ve µ de serinin beklenen değeri olmak üzere,
p
( X t − µ ) = ∑ α i ( X t −i − µ ) + et
( 3.3.2.11)
i =1
şeklinde verilir ve AR(p) şeklinde gösterilir. p modelin derecesini, α i , i = 1,2,..., p ler ve
σ 2 modelin parametrelerini göstermektedir.
AR(p) zaman serisi modeli,
p
p
X t = µ 1 − ∑ α i + ∑ α i X t −i + et
i =1 i =1
( 3.3.2.12)
p
şeklinde yazılabilir. Eğer,
∑α
i
= 1 ise, serinin beklenen değeri yok olmaktadır. Bu
i =1
durumda seri durağan değildir. AR(p) zaman serisi modelinin karakteristik denklemi,
p
f ( m) = m p − ∑ α i m p −i = 0
i =1
14
şeklinde olsun. Bu denklemin köklerinden en az bir tanesi mutlak değerce 1’e eşit ise, seri
durağan değildir. Denklemin köklerinden en az bir tanesi mutlak değerce 1’e eşit olması
p
için gerek ve yeter koşul:
∑α
i
= 1 olmasıdır (Akdi 2003).
i =1
Eğer et ∼ WN (0, σ 2 ) olduğunda AR(p) zaman serisi modeli,
p
X t = ∑ α i X t −i + et
( 3.3.2.13)
i =1
şeklinde verildiğinde bu serinin varyansı,
p
γ X (0) = Var ( X t ) = Cov( X t , X t ) = Cov X t , ∑ α i X t −i + et
i =1
p
= ∑ α i Cov( X t , X t −i ) + Cov( X t , et )
i =1
p
= ∑ α iγ X (i ) + σ 2
( 3.3.2.14)
i =1
şeklinde bulunur. Ayrıca, h > 0 için otokovaryanslar,
p
γ X (h) = Cov( X t , X t + h ) = Cov X t , ∑ α i X t + h−i + et + h
i =1
p
p
i =1
i =1
= ∑ α i Cov( X t , X t + h −i ) = ∑ α iγ X (h − i )
( 3.3.2.15)
olarak bulunur. Sonuç olarak Yule-Walker denklemleri:
γ X (0) = α1γ X (1) + α 2γ X (2) + ... + α pγ X ( p ) + σ 2
γ X (h) = α1γ X (h − 1) + α 2γ X (h − 2) + ... + α pγ X (h − p )
şeklinde hesaplanır.
15
( 3.3.2.16)
3.3.3 Kısmi otokorelasyon fonksiyonu
Zaman serileri analizlerinde otokorelasyon fonksiyonu serinin model derecesini
belirlemede çok açıklayıcı değildir. Özellikle AR serilerinde otokorelasyonlar model
derecesi hakkında bilgi vermez ancak korelasyonların azalma hızına göre serinin
durağanlığı hakkında bir şey söylenebilir. Fakat model derecesini belirlemede kısmi
otokorelasyon fonksiyonu kullanılabilir.
Herhangi bir
{ X t : t = 1, 2,3,..., n}
zaman serisi verildiğinde, X t nin X t −1 , X t − 2 ,..., X t −h
üzerine regresyonu yapıldığında, X t − h nin katsayısı h nci kısmi otokorelasyon olarak
tanımlanır. Serilerin kısmi otokorelasyonları korelasyonlar yardımı ile kolaylıkla
hesaplanmaktadır (Enders 1995). Burada, ρh ler serinin otokorelasyonlarını göstermek
üzere Ph matrisi,
1
ρ
1
.
Ph = .
.
ρh −2
ρ
h −1
ρ1
1
ρ2
ρ1
.
.
.
.
.
.
ρ h −3
ρh−2
ρh−4
ρ h −3
. . . ρ h −1
. . . ρh−2
. . .
.
. . .
.
. . .
.
. . . ρ1
. . .
1
şeklinde olsun. Ph matrisinin yardımı ile Ph* matrisi,
1
ρ
1
.
*
Ph = .
.
ρh−2
ρ
h−1
ρ1
1
.
ρ2
ρ1
.
.
. . .
.
. . .
. . .
.
.
. . .
. . .
ρh −3 ρh−4 . . .
ρh−2 ρh −3 . . .
olarak yazılır.
16
ρ1
ρ2
.
.
.
ρh−1
ρh
Sonuç olarak φ (h) h nci kısmi otokorelasyon,
φ (h) =
det( Ph* )
det( Ph )
(3.3.3.1)
şeklinde ifade edilir. Fakat MA serileri ve ARMA serileri için kısmi otokorelasyonların
hesaplanması oldukça zaman almaktadır. Fakat aşağıda verilen formül ile bu sorun ortadan
kalkmaktadır. Herhangi bir zaman serisinin otokorelasyonları ρ j , kısmi otokorelasyonları
ise φ ( j ) ile gösterilsin. Bu durumda, (3.3.3.1) eşitliğinden, φ (1) = ρ1 ve φ (2) =
( ρ 2 − ρ12 )
(1 − ρ12 )
elde edilir.
Diğer kısmi otokorelasyonlar φs , j = φ( s −1), j − φs ,sφ( s −1),( j −1) olmak üzere,
h −1
φ (h) =
ρ h − ∑ φ( h −1), j ρ h − j
j =1
h −1
(3.3.3.2)
1 − ∑ φ( h −1), j ρ j
j =1
formülü ile hesaplanabilir (Enders 1995).
Bazı durağan zaman serileri modelleri için otokorelasyon ve kısmi otokorelasyon aşağıdaki
şekilde elde edilir. İlk olarak et
WN (0, σ 2 ) olmak üzere ikinci dereceden hareketli
ortalama serisi,
X t = et + β1et −1 + β 2et − 2
incelensin. Bu serinin otokovaryans fonksiyonu,
σ 2 (1 + β12 + β 22 )
2
σ ( β1 + β1β 2 )
γ X ( h) =
σ 2β2
0
şeklindedir.
17
, h=0
, h = ±1
, h = ±2
,
h ≥3
(3.3.3.3)
Otokorelasyon fonksiyonu ise,
1
( β + β β ) /(1 + β 2 + β 2 )
1
1 2
1
2
ρ X (h) =
2
2
β 2 /(1 + β1 + β 2 )
0
, h=0
, h = ±1
, h = ±2
, h ≥3
(3.3.3.4)
şeklinde bulunur.
Burada β1 = −0.3 ve β 2 = −0.4 olsun. Bu durumda serinin otokovaryansları (3.3.3.3) de
verilen otokovaryans fonksiyonu yardımıyla γ (0) = 1.25σ 2 , γ (1) = −0.18σ 2 , γ (2) = −0.4σ 2
şeklinde hesaplanır. Serinin otokorelasyonları ise ρ0 = 1 , ρ1 = −0.144 , ρ 2 = −0.32 ve
h > 2 için ρ h = 0 olduğu açıktır.
Serinin
φ (2) =
birinci
ve
ikinci
kısmi
otokorelasyonları,
φ (1) = ρ1 = −0.144
ve
( ρ2 − ρ )
= −0.348 şeklinde hesaplanır. (3.3.3.2) formülü yardımı ile
(1 − ρ )
2
1
2
1
2
φ (3) =
ρ3 − ∑ φ2, j ρ3− j
j =1
2
1 − ∑ φ2, j ρ j
=−
φ21 ρ 2 + φ22 ρ1
1 − φ21 ρ1 − φ22 ρ 2
j =1
şeklinde yazılır. Burada, φ21 = φ11 − φ22φ11 = −0.194 şeklinde hesaplandıktan sonra bu değer
formülde yerine yazılarak φ (3) = −0.1304 bulunur. Benzer şekilde φ (4) = −0.163 ve
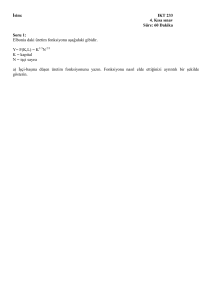
φ (5) = −0.088 olarak hesaplanır. Elde edilen grafikler şekil 3.1 de gösterilmiştir.
Şekil 3.1 MA(2) serisi için otokorelasyonlar ve kısmi otokorelasyonlar
18
Otokorelasyonlar belli bir noktadan sonra sıfırdır, kısmi otokorelasyonlarda ise bir azalma
görülmektedir. Bu durum incelenilen serinin MA(2) serisi olmasından kaynaklanmaktadır.
İkinci olarak durağan bir AR(2) serisi et
WN (0, σ 2 ) olmak üzere,
X t = 1.7 X t −1 − 0.72 X t −2 + et serisi göz önüne alınsın.
AR serileri bölümünde (3.3.2.16) da verilen Yule- Walker denklemleri yardımı ile
γ (h) = α1γ X (h − 1) + α 2γ X (h − 2)
(3.3.3.5)
elde edilir. Bu eşitlik kullanılarak,
α12
α1
γ X (1) =
γ X (0) ve γ X (2) =
+ α 2 γ X (0)
1−α2
1−α2
ifadelerine ulaşılır. Serinin otokorelasyonları bu ifadeler kullanılarak elde edilir. Yani,
ρ1 =
γ X (1)
α1
γ (2)
α2
ve ρ 2 = X
= 1 + α2
=
γ X (0) 1 − α 2
γ X (0) 1 − α 2
şeklinde ifade edilir. Formüllerde α1 = 1.7 ve α 2 = −0.72 değerleri yerine yazıldığında
ρ1 = 0.988372093 ,
ρ 2 = 0.960232558
şeklinde
hesaplanır.
Benzer
şekilde
diğer
otokorelasyon değerleri de elde edilebilir. Serinin birinci kısmi otokorelasyonu,
φ (1) = ρ1 = 0.988372093 bulunur. İkinci kısmi otokorelasyon ise,
1
P2 =
ρ1
ρ1
1
P2* =
ρ1
ρ1
1
0.988372093
=
ρ 2 0.988372093 0.960232558
1
0.988372093
=
1 0.988372093
1
19
P2 ve P2* matrisleri yardımı ile
det( P2* )
φ (2) =
= −0.72 = α 2
det( P2 )
şeklinde hesaplanır. Kısmi otokorelasyonlar ikinci gecikmeden sonra sıfır olacaktır.
Otokorelasyonlarda ise bir azalma görülmektedir.
Bu durum serinin AR(2) serisi
olmasından kaynaklanmaktadır.
Durağan zaman serileri modellerinden MA serilerinde otokorelasyonların, AR serilerinde
ise kısmi otokorelasyonların belli noktadan sonra sıfır olduğu görülmektedir. Ancak bazı
serilenin otokorelasyonları ve kısmi otokorelasyonları azalmasına rağmen sıfır olmayabilir.
Bu durumda serilere otoregresif hareketli ortalama serileri denir. Bir sonraki bölümde
otoregresif hareketli ortalama serileri hakkında bilgi verilmektedir.
3.3.4 Otoregresif hareketli ortalama serileri (Autoregressive moving series,
ARMA)
Hareketli ortalama serileri her zaman durağan serilerdir. Otoregresif zaman serilerinin
durağanlığı ise karakteristik denkleminin köklerine bağlıdır. Hareketli ortalama serilerinin
otokorelasyonları belli bir yerden sonra sıfır olmaktadır. Bununla birlikte kısmi
otokorelasyonları ise azalmaktadır. Otoregresif zaman serilerinde ise otokorelasyonlar
azalmakta ve kısmi otokorelasyonlar belli bir yerden sonra sıfır olmaktadır. Bir zaman
serisi verildiğinde otokorelasyonlar ve kısmi otokorelasyonlar ile serinin model dereceleri
belirlenmektedir. Bazen serinin otokorelasyonları ve kısmi otokorelasyonları azalmasına
rağmen sıfır olmayabilir. Böyle bir durumda seriye otoregresif zaman serisi veya hareketli
ortalama serisi adı verilemez. Bu tür serilere otoregresif hareketli ortalama serileri denir.
20
WN (0, σ 2 ) ve θ q ≠ 0 olmak üzere,
Bir MA serisi, et
q
X t − µ = et + ∑ θ i et −i
(3.3.4.1)
i =1
q
şeklindedir. Bu serinin karakteristik denklemi,
mq + ∑ θ i m q −i = 0 dır. Hareketli ortalama
i =1
serileri her zaman durağan serilerdir ve karakteristik denklemin bütün kökleri mutlak
değerce 1 den küçük ise seriye tersinirdir(invertible) denir. Serinin tersinir olması,
∞
∞
i =1
i =0
∑ π i < ∞ olmak üzere, et = ∑ π i ( X t −i − µ ) şeklinde yazılabilir olması anlamındadır.
Ortalaması
µ
olan MA(q) serisini, θ ( B) = 1 + θ1 B + θ 2 B 2 + ... + θ q B q
olmak üzere,
X t = µ + θ ( B )et şeklinde yazabiliriz. Burada, B , gerileme operatörünü göstermektedir.
Eğer serinin ortalamasının µ olduğunu varsayarsak, seriyi X t − µ = θ ( B)et şeklinde de
ifade
edebiliriz.
Benzer
şekilde
ortalaması
µ
olan
AR(p)
serisi,
p
X t − µ = et + ∑ φi ( X t −i − µ ) şeklinde yazılır. AR serilerinin durağanlığı karakteristik
i =1
denklemin köklerine bağlıdır. AR serileri her zaman tersinirdir.
Eğer φ p = 0 olmak üzere, φ ( B ) = 1 − φ1 B − φ2 B 2 − ... − φ p B p şeklinde ise, AR(p) serisini,
φ ( B )( X t − µ ) = et şeklinde yazabiliriz. Serinin ortalaması sıfır olduğu durumda ise
φ ( B) X t = et şeklinde olacağı açıktır.
Sonuç olarak, model dereceleri p ve q olan bir ARMA(p,q) serisi φ ( B)( X t − µ ) = θ ( B)et
şeklinde gösterilir. Burada, p serinin AR kısmının model derecesini, q ise serinin MA
kısmının model derecesini göstermektedir. Eğer serinin ortalaması sıfır ise, bir ARMA(p,q)
serisi,
21
φ ( B) X t = θ ( B)et
(3.3.4.2)
şeklinde gösterilir.
Daha açık bir şekilde ifade etmek istersek, model dereceleri p ve q olan µ ortalamalı bir
ARMA(p,q) serisi φ p ≠ 0 ve θ q ≠ 0 olmak üzere
p
q
j =1
i =1
( X t − µ ) = ∑ φ j ( X t − j − µ ) + et + ∑ θ i et −i
(3.3.4.3)
şeklinde yazılır. Eğer serinin ortalaması sıfır ise ARMA(p,q) serisi,
p
q
j =1
i =1
X t = ∑ φ j X t − j + et + ∑ θi et −i
(3.3.4.4)
olarak yazılır.
Bir ARMA(p,q) serisinin durağan olabilmesi için, AR kısmının durağan olması; tersinir
olabilmesi için ise MA kısmının tersinir olması yeterlidir.
∞
Eğer X t
ARMA( p, q ) serisi durağan ise,
∑ψ
j
< ∞ şartı sağlandığında,
j =0
∞
X t = ∑ψ j et − j
(3.3.4.5)
j =0
şeklinde yazılabilir. Dolayısıyla serinin otokovaryans fonksiyonunun,
∞
γ (h) = σ 2 ∑ψ jψ j + h
(3.3.4.6)
j =0
şeklinde olacağı açıktır. Ancak burada ψ j katsayılarının belirlenmesi gerekir.
22
Eğer ARMA(p,q) serisini φ ( B) X t = θ ( B)et şeklinde ise,
φ ( B) X t = θ ( B)et ⇒ X t =
θ ( B)
e
φ ( B) t
(3.3.4.7)
olacaktır. Buradaki ψ j katsayıları z < 1 olmak üzere,
ψ ( z) =
θ ( z) ∞
= ∑ψ z j
φ ( z ) j =0 j
(3.3.4.8)
özdeşliğinden yararlanarak elde edilir.
Ayrıca burada,
θ ( z ) = 1 + θ1 z + θ 2 z 2 + ... + θ q z q
φ ( z ) = 1 − φ1 z − φ2 z 2 − ... − φ p z p
(3.3.4.9)
dir. Bu eşitliklerin çözülmesi ile θ 0 = 1 ve j > q için θ j = 0 ve ayrıca j > p için φ j = 0
olduğundan çözümler,
ψj−
∑ φψ
k
j −k
=θj
, 0 ≤ j < max( p, q + 1)
0< k ≤ j
ψj−
(3.3.4.10)
∑ φψ
k
j −k
=0
,
j ≥ max( p, q + 1)
0< k ≤ p
şeklindedir (Brockwell and Davis 1987). Bu eşitlikler çözüldüğünde,
ψ 0 = θ0 = 1
ψ 1 = θ1 + ψ 0φ1 = θ1 + φ1
ψ 2 = θ 2 + ψ 0φ2 +ψ 1φ1 = θ 2 + φ2 +ψ 1φ1 + φ12
ψ j katsayıları ardışık olarak bulunur.
23
3.4 Öngörü (Forecasting)
Öngörü, gözlemlediğimiz değerlerin dışında rasgele değişkenin almasını beklediğimiz
değerdir.
Öngörüler yapılırken kullanılan bilgi, geçmiş zamanlardaki gözlem değerleridir. Bu gözlem
değerleri yardımı ile rasgele değişkenin gelecekte alacağı değerler için bir tahminde
bulunulur.
X 1 , X 2 ,..., X n rasgele değişkenleri verildiğinde X n +1 için öngörü,
X n +1 = E ( X n +1 X 1 , X 2 ,..., X n )
(3.4.1)
olarak tanımlanır. Normal dağılım varsayımı altında bu koşullu beklenen değer
X 1 , X 2 ,..., X n değerlerinin bir lineer birleşimidir.
Kabul edelim ki Y1 , Y2 ,..., Yn rasgele değişkenleri et
WN (0, σ 2 ) olmak üzere ( et ler de Y1
den bağımsız)
Y1
Yt =
α1Yt −1 + et
, t =1
(3.4.2)
, t≥2
modeline uygun olsun. α1 < 1 olsun yani serinin durağan olduğu varsayılsın. Bu durumda
Yn +1 , Yn + 2 ,..., Yn + s değerleri öngörülmek istensin. e1 , e2 ,..., en ler bağımsız olduğundan dolayı
en +1
rasgele
değişkeni
E (en+1 Y1 , Y2 ,..., Yn ) = E (en +1 ) = 0
Y1 , Y2 ,..., Yn
lerden
bağımsızdır.
Dolayısı
ile
)
olacağından, Yn +1 = E (Yn+1 Y1 , Y2 ,..., Yn ) = α1Yn şeklinde
hesaplanır. Yani öngörü sadece serinin aldığı son değere ve parametreye bağlıdır.
24
)
İki adım ilerisi için öngörü, Yn + 2 = E (Yn+ 2 Y1 , Y2 ,..., Yn ) = α12Yn olacaktır. Bu şekilde devam
edilirse s adım ilerisi için öngörü,
)
Yn + s = α1sYn
(3.4.3)
olarak hesaplanır. Görüldüğü gibi öngörüler örneklemin en son değerine bağlıdır ve s → ∞
için öngörüler serinin ortalaması olan 0 değerine yaklaşmaktadır.
Bu öngörüler hesaplandıktan sonra öngörü hataları ve bu öngörü hatalarının varyansı da
)
verilmelidir. Bir adım ilerisi için öngörü hatası, Yn +1 − Yn +1 = (α1Yn + en +1 ) − α1Yn = en +1 ve
)
öngörü hatasının varyansı ise, Var (Yn +1 − Yn +1 ) = Var (en +1 ) = σ 2 olarak bulunur.
İki adım ilerisi için elde edilen öngörü hatası,
)
Yn + 2 − Yn + 2 = (α1Yn +1 + en + 2 ) − α12Yn
= (α1 (α1Yn + en +1 ) + en + 2 ) − α12Yn
= α12Yn + α1en +1 + en + 2 − α12Yn
= α1en +1 + en + 2
dır.
İki adım ilerisi için öngörü hatasının varyansı,
)
Var (Yn + 2 − Yn + 2 ) = Var (α1en +1 + en + 2 )
= σ 2 1 + α12
şeklinde hesaplanır.
25
Bu şekilde devam edildiği zaman s adım ileri için öngörü hatası,
s −1
)
Yn + s − Yn + s = ∑ α1j en + s − j
(3.4.4)
j =0
şeklindedir. Bu öngörü hatasının varyansı ise,
s −1
)
Var (Yn + s − Yn + s ) = σ 2 ∑ α12 j
(3.4.5)
j =0
olacağı açıktır. Burada s → ∞ için öngörü hatalarının varyansı serinin varyansına doğru
yaklaşır. Çünkü,
s −1
)
σ2
Var (Yn + s − Yn + s ) = σ 2 ∑ α12 j →
= Var (Yt )
1 − α12
j =0
(3.4.6)
dir. Yani, seri durağan ise öngörüler serinin ortalamasına doğru yaklaşır. Bununla birlikte,
öngörü hatalarının varyansı da serinin varyansına doğru yaklaşır. Ancak serinin durağan
olmaması durumunda (α1 = ±1) bu özellikler geçerli değildir.
) )
)
Eğer Yn +1 , Yn + 2 ,..., Yn + s değerleri aynı anda öngörülmek istendiğinde, Yn +1 , Yn + 2 ,..., Yn + s
şeklinde öngörüler elde edilir. Bu öngörülerin hataları ise,
)
en +1
Yn +1 − Yn +1
)
α1en+1 + en + 2
Yn + 2 − Yn + 2
.
.
=
.
.
.
.
) s
s −1
Yn + s − Yn + s α1 en+1 + α1 en + 2 + ... + en + s
(3.4.7)
şeklindedir.
26
Buradan öngörü hatalarının varyans-kovaryans matrisi,
)
) )
)
Z = (Yn +1 , Yn + 2 ,..., Yn + s ) ' ve Z = (Yn +1 , Yn + 2 ,..., Yn + s ) '
%
%
olmak üzere,
1
α1
.
2
.
α1 1 + α1
2
.
.
1 + α1 + α14
)
)
E ( Z − Z )( Z − Z ) ' = σ 2 .
.
.
% % % %
.
.
.
.
.
.
.
.
.
.
.
.
.
.
α1s −1
. .
.
s −1
2j
. . ∑ α1
j =0
.
.
.
(3.4.8)
şeklindedir.
Eğer bir öngörü yapılıyorsa, bu öngörü için güven aralığı oluşturmak gereklidir. s adım
)
ilerisi için öngörü Yn + s ise bu öngörü için %95 lik güven aralığı,
s −1
)
Yn + s ± Z (0.05) σ 2 ∑ α12 j
(3.4.9)
j =0
olarak yazılabilir. Fakat pratikte buradaki α1 ve σ 2 değerleri parametrelerdir ve bunların
)
tahmin değerleri kullanılır. Ayrıca, burada Yn + s kestiricisinin dağılımının bulunmasıdır.
)
Bununla birlikte, yukarıda verilen güven aralığında Z (0.05) yazılabilmesi için Yn + s
kestiricisinin dağılımının normal olması gerekir.
Aşağıdaki model göz önüne alındığında,
, t =1
Y1
Yt =
α1Yt −1 + et , t ≥ 2
Eğer α1 < 1 ise seri durağandır.
(3.4.10)
27
Ayrıca,
σ2
E (Yt ) = 0 , Var (Yt ) =
1 − α12
dir.
)
Burada, s → ∞ için Yn + s = α1sYn → 0 = Var (Yt ) ve öngörü hatalarının varyansı da,
s −1
)
σ2
Var (Yn + s − Yn + s ) = σ 2 ∑ α12 j →
= Var (Yt )
1 − α12
j =0
dır.
Ancak
α1 = 1
ise
seri
durağan
(3.4.11)
değildir.
Çünkü
Y0 = 0
alındığında,
t
Yt = ∑ e j olduğundan, kovaryans, Cov(Yt , Yt + h ) = σ 2 min(t , t + h) dir ve otokovaryanslar
j =1
zamana bağlıdır. Öngörüler hesaplanırken serinin durağan olup olmaması hakkında bir bilgi
gerekmez. Çünkü öngörüler koşullu beklenen değer olarak hesaplanır. Dolayısıyla dağılım
bilindiği sürece öngörüler hesaplanabilir. Öngörüler hesaplanırken durağanlığa gerek
duyulmaz fakat durağanlık öngörülerin hesaplanmasında önemli bir rol oynamaktadır.
Yukarıda hesaplanan öngörüler serinin durağan olmaması durumunda( α1 = 0 olması
)
durumunda) sabit kalmaktadır. Bu durumda öngörüler, her s için, Yn + s = Yn şeklinde
)
olacaktır. Yani s → ∞ ve α1 = 1 ise E (Yn + s − Yn + s ) 2 = σ 2 s → ∞ olur. Diğer taraftan, α1 > 1
ise,
s −1
)
α 2s −1
E (Yn + s − Yn + s ) 2 = σ 2 ∑ α12 j = σ 2 12
→∞
α1 − 1
j =0
(3.4.12)
olacaktır.
Y0 değeri bir rasgele değişkendir ve istatistiki sonuç çıkarımında önemli role sahiptir.
Genelde Y0 = 0 olarak alınmaktadır. Fakat bazen Y0 = µ gibi bir sabit değer alınmaktadır.
28
Eğer Y1 = α1Y0 + e1 olduğunda,
Y0 =
1
α1
Y1 −
1
α1
e1 ⇒ Y0 = α *Y1 − α *e1
(3.4.13)
)
ve α * < 1 olduğundan, Y0 = α *Y1 olacaktır.
p
p
)
Bir AR(p) modeli X t = et + ∑ α j X t − j şeklinde verilmiş ise öngörüler, X n + s = ∑ α j X n + s − j
j =1
j =1
ardışık olarak elde edilir.
3.5 Durağan Olmayan Zaman Serileri
İstatistik ve ekonomi gibi çalışma alanlarında kullanılan serilerin çoğu durağan olmayan
zaman serileridir. Birim köklü zaman serileri durağan olmayan zaman serileri arasında
büyük yer tutmaktadır. Bir serinin durağan olmadığı düşünülüyor ise seri mutlaka test
edilmelidir. Eğer ki durağan değilse, durağanlık sağlanmalıdır. Çünkü zaman serilerinde
durağanlık, en önemli kavramalardan birisidir. Dolayısıyla analizlere başlamadan önce
serinin durağan olup olmadığı araştırılmalıdır. Ayrıca durağan serilerle çalışmak, istatistiki
anlamda güvenilir sonuçlar elde etmemizi sağlar.
Zaman serileri uzun dönemde trend ile deterministik sürecin lineer bileşimi olarak
yazılabilir. Deterministik trend, zaman serisinin zaman içinde sürekli olarak artması(veya
azalması) şeklindeki eğilim olarak tanımlanır.
(3.5.1)
X t = X 0 + tµ
Modeldeki {tµ } rasgele olmayan terimler serisine deterministik trend adı verilir.
Ayrıca et
WN (0, σ 2 ) olmak üzere,
X t = X t −1 + et
(3.5.2)
serisi göz önüne alınsın.
29
Ardışık olarak yazıldığında,
t
X t = X 0 + ∑ ei = X 0 + vt
(3.5.3)
i =1
t
elde edilir. Modeldeki {vt } = ∑ ei serisine de stokastik trend denir. Stokastik trend, serideki
i =1
zamanla artan (veya azalan) eğilimin sürekli olmaması, genellikle artış(veya azalış)
içerisinde olan bir seride azalışlarında(veya artışlarında) gözlendiği durumu ifade
etmektedir.
Yukarıdaki (3.5.1) ve (3.5.3) modelleri birleştirildiğinde,
t
X t = X 0 + t µ + ∑ ei = X 0 + t µ + vt
(3.5.4)
i =1
modeli elde edilir. Modelde bulunan {tµ + vt } terimi ise deterministik ve stokastik
trendlerin birleşimidir. Burada X 0 stokastik bir rasgele değişken ya da stokastik olmayan
bir sabit olarak düşünülür. Uygulamada ise genellikle X 0 = 0 veya X 0 = µ olarak
alınabilir.
Bir serinin beklenen değeri zamana bağlı iken serinin otokovaryansları zamana bağlı değil
ise bu serinin deterministik trend içerdiği düşünülür (Yalçın 2002). Yukarıda verilen (3.5.4)
modelinde verilen seri için vt durağan ise tµ
deterministik trend olarak adlandırılır.
Burada vt nin otokovaryansları zamana bağlıdır. Bazı seriler (3.5.4) modelindeki vt gibi
durağan olmayan bileşen içerebilir. Bu tür serilerin stokastik trend içerdiği düşünülür.
Başka bir ifade ile bir serinin sadece otokovaryansları zamana bağlı ise seri stokastik trend
içeriyor denir. Bazı seriler hem deterministik hem de stokastik trend içerebilir.
Durağanlık, zaman serilerinde en önemli kavramalardan birisidir. İstatistiki sonuç
çıkarımlarının çoğunda öncelikle serinin durağan olup olmadığı araştırılır. Örneğin Türkiye
ekonomisindeki birçok değişken durağan değildir. Dolayısıyla geleceğe yönelik kararlar
30
alırken analizler yapılmadan önce çalıştığımız serilerin durağanlığı sağlayıp sağlamadığı
mutlaka kontrol edilmelidir. Aksi takdirde elde edilen sonuçlar istatistiki anlamda güvenilir
olmayacaktır.
Bir seriyi durağan hale getirmek için çeşitli yollar vardır. Eğer seri sadece deterministik
trend içeriyor ise serinin ortalaması çıkarılarak durağanlık sağlanabilir. Seri sadece
stokastik trend içeriyor ise serinin durağanlığı fark alma yöntemi ile sağlanabilir. Ancak
burada fark alma operatörünün önceden tanımlanmış olması gerekir. Zaman serilerinde
durağanlığı veya birim kökü test etmek için çeşitli yöntemler vardır. Bu yöntemlerin içinde
en çok kullanılan Dickey-Fuller testidir. Aşağıda Dickey-Fuller testine kısaca
değinilecektir.
3.5.1 Dickey-Fuller birim kök testi
Herhangi bir serinin(genellikle iktisadi serinin) birim kök içerip içermediğini sınamak için
en çok kullanılan yöntem parametrelerin en küçük kareler tahmin edicilerinin dağılımına
göre geliştirilen Dickey-Fuller yöntemidir. Dickey-Fuller yöntemi, parametrelerin en küçük
kareler tahmin edicisinin birim kök varsayımı altındaki dağılımına dayanır. Ancak DickeyFuller testleri, süreç birim köke sahip ve bu durum fark alma yöntemi ile ortadan
kaldırılabiliyorsa uygulanır. Dickey-Fuller birim kök testleri, zaman serilerinde birim kök
araştırmasını sağlayan ilk biçimsel yöntemdir.
Birinci dereceden bir otoregresif zaman serisi modeli, et
X t = ρX t −1 + et
WN (0, σ 2 ) olmak üzere,
(3.5.1.1)
şeklinde verilsin. Bu denklemin birinci dereceden farkı alındığında aşağıdaki model
X t − X t −1 = ρX t −1 − X t −1 + et
(3.5.1.2)
veya
31
∇X t = ( ρ − 1) X t −1 + et
(3.5.1.3)
şekline dönüşür.
Burada, γ = ρ − 1 olarak tanımlandığında (3.5.1.3) denklemi,
∇X t = γX t −1 + et
(3.5.1.4)
şeklinde olmaktadır. Dolayısıyla, (3.5.1.1) modeline göre H 0 : ρ = 1 hipotezi ile H 0 : γ = 0
hipotezi denktir.
Burada (3.5.1.1) de verilen zaman serisi için, H 0 : ρ = 1 yokluk hipotezi altında,
Cov( X t , X t + h ) = σ 2 min(t , t + h) şeklindedir yani kovaryans zamanın bir fonksiyonu
olmaktadır. Sonuç olarak, H 0 : ρ = 1 yokluk hipotezi altında, (3.5.1.1) de verilen zaman
serisi durağan değildir.
Durağan olmayan zaman serilerinde H 0 : ρ = 1 hipotezinin testinde t istatistiği kullanılır.
Burada kullanılan t istatistiğinin dağılımı negatif olarak sola çarpıktır. Dolayısıyla, sol
uçtaki kritik değerler Student t dağılımınkinden daha küçük olabilmektedir. Dağılım
standart t dağılımı olmadığında limit dağılımı aşağıdaki üç ayrı model için,
∇X t = γX t −1 + et
(3.5.1.5)
∇X t = α + γX t −1 + et
(3.5.1.6)
∇X t = α + β t + γ X t −1 + et
(3.5.1.7)
sırasıyla τ , τ µ , τ τ olmaktadır (Enders 1995). Burada, τ , τ µ ye göre ve τ µ de τ τ ya göre
daha güçlüdür (Dickey et all. 1986).
32
∧
H 0 : ρ = 1 veya H 0 : γ = 0 hipotezinin test edilmesi istendiğinde hesaplanan τ veya
∧
varyans bilindiğinde n( ρ τ − 1) istatistiğinin değeri kritik değerlerden küçük ise yokluk
hipotezi red edilmektedir. Başka bir ifade ile X t serisi durağandır.
3.5.2 Genişletilmiş Dickey-Fuller birim kök testi
Veri üretim süreci AR(p) olan bir zaman serisinin, p ≥ 2 olmak üzere, AR(1) olarak
modellenmesi hata terimlerinde otokorelasyonlara sebep olacağından serinin durağanlığını
araştırmak için Dickey-Fuller testinin kullanılması başlangıçta geçersiz olacaktır. Bunun
nedeni et lerin beyaz gürültü süreci olması varsayımı bozulmasıdır. Fakat verilen bir birim
köklü serinin herhangi bir X t
AR( p ) (veya ARMA(p,q)) serisi içinde Dickey-Fuller testi
uygulanmaktadır. Bu durumda da verilen bir X t serisinin,
p
∇X t = α 1 X t −1 + ∑ β j ∇X t − j + et
(3.5.2.1)
j =1
şeklinde yazılması durumunda
H 0 : α1 = 0
H0 : Xt
serisi birim köklüdür yokluk hipotezini
hipotezinin test edilmesi ile aynı olacaktır. Bunun için X t nin X t −1 ,
∇X t −1 ,..., ∇X t − p üzerine regresyonunun yapılması durumunda X t −1 in katsayısı hesaplanır
ve
τˆ =
αˆ1
Sαˆ1
test istatistiği(veya τ µ ,τ τ ) kullanılır. Kritik değerler Dickey-Fuller testinde kullanılan
değerler ile aynıdır.
Bir serinin birim kök içerip içermediğini sınamak için çeşitli bilgisayar programları
kullanılmaktadır. Çalışmada 1987:01-2007:01 dönem aralığında Türkiye için sanayi üretim
endeksi(industrial production index) ele alınmıştır. Bu serinin birim kök içerip içermediği
33
incelenmiştir. Sanayi üretim endeksi için Eviews programına ait birim kök sınaması
sonuçları aşağıdaki çizelge 3.1 de belirtilmiştir.
Çizelge 3.1 Sanayi üretim endeksi serisi birim kök testi
Augmented Dickey-Fuller test statistic
Test critical values:
1% level
5% level
10% level
t-Statistic
Prob.
0.084829
-3.520307
-2.900670
-2.587691
0.9625
Birim kök sınaması sonuçlarına göre, p değerinin oldukça büyük olduğunu görülür.
Dolayısıyla 1987:01-2007:01 dönem aralığında Türkiye için sanayi üretim endeksi serisi
birim kök içermektedir. Yapılan analizlerin istatistiksel anlamda güvenli olabilmesi için
serinin birim kökten arındırılması gerekmektedir. Bunun için serinin birinci dereceden farkı
alınır.
Sanayi üretim endeksi serisinin birinci dereceden farkı alındıktan sonra yapılan birim kök
sınaması sonuçları aşağıdaki çizelge 3.2 de verilmiştir.
Çizelge 3.2 Sanayi üretim endeksi fark serisi birim kök testi
Augmented Dickey-Fuller test statistic
Test critical values:
1% level
5% level
10% level
t-Statistic
Prob.
-8.272710
-3.520307
-2.900670
-2.587691
0.0000
Serisinin birinci dereceden farkı alındıktan sonra yapılan birim kök sınaması sonuçları göre,
p değerinin küçüldüğü dikkat çekmektedir dolayısıyla serinin birim kökten arındırıldığı
anlaşılır.
34
İktisadi serilerin büyük çoğunluğu birim kök içermektedir. Bu nedenle istatistiksel anlamda
güvenli sonuçlar almak için analizlere başlamadan önce serilerin birim kök içermediğinden
emin olmak gereklidir. Seri birim köklü ise yukarıdaki şekilde seri birim kökten
arındırılmalıdır. Aksi takdirde sonuçlar çok farklı çıkabilmektedir.
35
4. VEKTÖR OTOREGRESİF(VAR) MODELLER
VAR modelleri zaman serileri modelleri arasında en fazla kullanılan modellerdir. Bu
modeller öncelikle makroekonomik değişkenler arasındaki ilişkilerin incelenmesinde ve
rasgele şokların değişkenlere olan etkisinin analizinde kullanılır.
İktisadi ilişkilerin çoğu oldukça karmaşıktır. Bundan dolayı iktisadi ilişkiler eşanlı
denklemler yardımıyla incelenmektedir. Eşanlı denklemlerde bağımlı-bağımsız değişken
kavramı yerine içsel-dışsal değişken kavramı ortaya çıkmaktadır. İçsel değişken, değeri
model içerisinde belirlenen değişken olarak tanımlanırken; dışsal değişken, değeri model
dışında belirlenen değişken olarak tanımlanabilir.
İktisadi ilişkilerde çoğunlukla değişkenler birbirleriyle ilişkilidir. Değişkenler ilişkili
olduğundan dolayı, değişkenleri içsel ya da dışsal değişken olarak ayırmak oldukça
zorlaşmaktadır.
VAR
modellerinde
modeli
kısıtlayan
varsayımların
kesinlikle
kullanılması
gerekmemektedir. Bundan dolayı model iktisadi teoriden bağımsız şekilde oluşturulabilir.
Ayrıca bu modellerde içsel ya da dışsal değişken ayrımı da gerekmemektedir. Seçilen
bütün değişkenler birlikte ele alınır. Bu özelliği ile diğer eşanlı denklemlerden ayrılır.
VAR analizinde sonuçlarının istatistiki anlamda güvenilir olması için, kullanılan serilerin
durağan olması gereklidir. Zaman serileri genellikle durağan değildir. Bu nedenle analizlere
başlamadan önce serilerin durağan olup olmadığı incelenir. Eğer ki seriler durağan değil ise
önce seriler durağanlaştırır sonra analize başlanır.
36
İki değişkenli VAR modeli, standart şekilde aşağıdaki gibi ifade edilebilir:
Yt = α 1 +
k
∑
k
∑
λ1iY t − i +
i =1
Z t = β1 +
k
∑
λ 2 i Z t − i + e1 t
i =1
k
∑
γ 1iY t − i +
i =1
γ
2i
Z t−i + e2t
(4.1)
i =1
Ayrıca iki değişkenli VAR modeli matrisler yardımı ile aşağıdaki şekilde de ifade
edilebilir:
k
∑ λ1i
Yt α1 i =1
Z = β + k
t 1 γ
∑ 1i
i =1
Y e
i =1
t −i + 1t
k
e
Z
γ 2 i t −i 2 t
∑
i =1
k
∑λ
2i
(4.2)
Yukarıdaki iki değişkenli VAR modelinde; k modelde gecikmelerin uzunluğunu, e
ortalaması sıfır ve sabit varyanslı normal dağılıma sahip rasgele hata terimlerini
göstermektedir. VAR modelinde hataların kendi gecikmeli değerleriyle ilişkisiz olduğu
varsayılır. Bunun nedeni değişkenlerin gecikme uzunluğunun arttırıldığında otokorelasyon
sorununun ortadan kalkmasıdır (Özgen ve Güloğlu 2004).
Hata terimleri arasındaki korelasyon sıfırdan farklı ise, yani hata terimleri birbirleriyle
ilişkili ise, hata terimlerinin birindeki değişim diğer bir hata terimini etkileyecektir. Ayrıca
hata terimleri, modeldeki tüm değişkenlerle ilişkisizdir. VAR modelinin sağ tarafında içsel
değişkenlerin gecikmeli değerleri yer almaktadır. Dolayısıyla eşanlılık problemi ile
karşılaşılmaz. Dolayısıyla tahminlerde en küçük kareler yöntemi kullanılabilir.
VAR modelleri, kısıtlanmış ve kısıtlanmamış VAR modelleri ikiye ayrılmaktadır. VAR
analizinde sonuç alabilmek için üç yol uygulanır.
37
1. Granger Nedenselliğini
2. Varyans Ayrıştırması
3. Etki-Tepki Fonksiyonları
VAR modelleri tek başına ekonomik yorum için fazla bir şey ifade etmez. Dolayısıyla VAR
modellerinde güvenilir ekonomik yorumlara ulaşabilmek için yukarıdaki üç yöntem
kullanılır.
4.1 Granger Nedensellik Testi
1969 yılında Granger, nedensellik ve dışsallık kavramlarını ortaya atmıştır (Granger 1969).
Granger nedensellik testine göre; eğer Z değişkenine ait bilgiler modele eklendiğinde Y
değişkeninin öngörüsüne katkıda bulunuyor ise Z değişkeni
Y değişkeninin nedenidir
(Özgen ve Güloğlu 2004). Yukarıda verilen iki değişkenli VAR modeli için Granger
nedensellik sınaması şu şekilde yapılır:
H 1 hipotezinin red edilememesi halinde Z değişkeni, Y değişkeninin nedeni değildir.
H 1 : λ21 = λ22 = ... = λ2 k = 0
H 2 hipotezinin red edilememesi halinde Y değişkeni, Z değişkeninin nedeni değildir.
H 2 : γ 11 = γ 12 = ... = γ 1k = 0
Eğer H 1 ve H 2 hipotezlerinin her ikisi de red edilirse, Z ve Y
nedensellik olduğu anlaşılır.
38
arasında iki taraflı
Granger nedensellik sınaması için oluşturulan hipotez testleri, F testiyle sınanabilir:
F=
( SSE (red ) − SSE ( full )) / r
SSE ( full ) /(n − p )
(4.1.1)
F istatistiğindeki SSE (red ) kısıtlanmış modelin hata kareler toplamını, SSE ( full )
kısıtlanmamış modelin hata kareler toplamını, r kısıt sayısını, n gözlem sayısını ve p
modeldeki parametre sayısını göstermektedir. Eğer F değeri, F tablo değerinden
büyükse, H 1 ve H 2 hipotezleri reddedilir (Özgen ve Güloğlu 2004).
4.2 Etki-Tepki Fonksiyonları
VAR analizinde, değişkenler arasındaki ilişkileri belirlemede etki-tepki fonksiyonlarının
önemli bir yeri vardır. Etki-tepki fonksiyonu bir değişkendeki şokun, sistemdeki
değişkenlerin her birinin gelecek değerleri üzerindeki etkisini ölçen bir büyüklüktür
(Saçkan 2006).
VAR modelinden etki-tepki katsayılarını elde etmede kullanılan çeşitli yöntemler vardır.
Bu yöntemlerden birisi hataların Cholesky ayrıştırması ile dikleştirilmesi ve elde edilen
varyans-kovaryans
matrisinin
köşegen
matris
haline
getirilmesidir.
Cholesky
ayrıştırmasından yararlanıldığında değişkenlerin modeldeki sıralaması önem kazanmaktadır
(Özgen ve Güloğlu 2006).
Etki-tepki fonksiyonlarının gerçek değerleri hesaplanamaz. Çünkü etki-tepki fonksiyonları,
VAR modeli katsayılarının doğrusal olmayan bir fonksiyonudur. Ancak, etki-tepki
fonksiyonlarının gerçek değerlerini içeren güven aralıkları oluşturulabilir. Bu konuda
Monte Carlo ve bootstrap yöntemleri sıkça kullanılmaktadır.
39
Etki-tepki fonksiyonları çeşitli bilgisayar programları yardımı ile çizdirilebilir. Çalışmada
Eviews programı ile 1987:01-2007:01 dönem aralığında Türkiye için döviz kuru ve tüketici
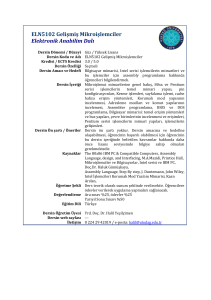
fiyat endeksi serileri incelenmiştir ve etki-tepki fonksiyonları şekil 4.1 de verilmiştir.
Kurdak i D egis ik ligin Tük etic i
Fiy at Endek s ine Etk is i
Kurdak i D egis ik ligin
Gec ik melerine Etk is i
0.012
0.012
0.010
0.010
0.008
0.008
0.006
0.006
0.004
0.004
0.002
0.002
0.000
0.000
-0.002
-0.002
1
2
3
4
5
6
7
8
9
10
11 12
1
2
Tük etic i Fiy at Endek s indek i D egis ik ligin
Kurdak i D egis ik lige Etk is i
4
5
6
7
8
9
10
11 12
Tük etic i Fiy at Endek s indek i
D egis ik ligin Gec ik melerine Etk is i
0.012
0.012
0.010
0.010
0.008
0.008
0.006
0.006
0.004
0.004
0.002
0.002
0.000
0.000
-0.002
-0.002
-0.004
3
-0.004
1
2
3
4
5
6
7
8
9
10
11 12
1
2
3
4
5
6
Şekil 4.1 Doğrusal olmayan etki-tepki fonksiyonları
40
7
8
9
10
11 12
Etki-tepki fonksiyonları grafiklerine ilişkin sonuçlar şu şekilde verilebilir:
Kurdaki değişikliğin gecikmelerine olan etkisini gösteren grafiğe bakıldığında, kurda
beklenmeyen bir değişim olduğunda gecikmelerinin ilk tepkisi negatif yöndedir. Değişimin
altı ay kadar etkili olduğu ve daha sonraki aylarda etkisinin ortadan kalktığı görülmektedir.
Kurdaki değişikliğin tüketici fiyat endeksine etkisi incelendiğinde, kurda beklenmeyen bir
değişim olduğunda tüketici fiyat endeksinin ilk tepkisi pozitif yöndedir. Daha sonra tüketici
fiyat endeksinin verdiği tepki giderek azalmaktadır ve yedinci aydan sonra tamamen
ortadan kalkmaktadır.
Tüketici fiyat endeksindeki değişikliğin kurdaki değişikliğe olan etkisini gösteren grafik
yardımı ile tüketici fiyat endeksinde beklenmeyen bir değişim olduğunda kurdaki
değişikliğin verdiği tepkinin ilk aylarda negatif yönde olduğu söylenir. Bu tepkinin etkisi
yaklaşık yedi-sekiz ay kadar sürdükten sonra yok olmaktadır.
Tüketici fiyat endeksindeki değişikliğin gecikmelerine olan etkisi incelendiğinde, tüketici
fiyat endeksinde beklenmeyen bir değişim olduğunda gecikmelerinin verdiği tepki ilk
aylarda negatif yönde olduğu görülür. Bu tepkinin etkisi yaklaşık altı-yedi ay kadar
sürdükten sonra yok olmaktadır
Sonuç olarak etki-tepki fonksiyonlarının grafikleri yardımı ile serilerde meydana gelen
değişikliklerin etkisi ortalama yedi ay kadar sürmektedir daha sonra etki ortadan
kalkmaktadır.
41
4. 3 Varyans Ayrıstırması
Varyans ayrıştırması, her bir rasgele şokun, gelecek dönemler için öngörü hata varyansına
olan etkisi belirlemek için kullanılmaktadır. Varyans ayrıştırması, modeldeki içsel
değişkenlerden birisindeki değişimi, tüm içsel değişkenleri etkileyen ayrı ayrı şoklar olarak
ayıran bir yöntemdir.
Varyans ayrıştırması ile elde edilen sonuçların yorumlanması oldukça önemidir. Yukarıda
verilen iki değişkenli VAR modelini düşünürsek ε 1t de meydana gelen bir şok Z
değişkeninin öngörü hata varyansını etkilemiyorsa, Z değişkeni dışsal değişken olarak
adlandırılır. Bunun nedeni; Z değişkeninin, Y değişkeninden bağımsız hareket etmesidir.
Eğer, ε 1t de meydana gelen bir şok Z değişkeninin öngörü hata varyansını tamamen
etkiliyorsa, Z değişkeni içsel değişken olarak adlandırılır. Varyans ayrıştırmasında
değişkenlerin sırası oldukça önemlidir çünkü analiz sonuçlarına etki etmektedir.
Dolayısıyla yapılacak yorumlar da etkilenmektedir (Özgen ve Güloğlu 2006).
42
5.VEKTÖR OTOREGRESİF MODELLER YARDIMI İLE TÜRKİYE’DEKİ
DÖVİZ KURU GEÇİŞİ EŞİK DEĞERİNİN TESPİTİ
Döviz kuru geçişi ile bir birim şokun genel fiyat seviyesine nasıl geçtiği araştırılır. Döviz
kuru artışları ve azalışları süresince kur geçişkenliği farklı olabilir. Dolayısıyla döviz
kurlarından fiyatlara geçiş etkisinin asimetrik bir yapıya sahip olduğu görülebilir. Döviz
kuru geçişi; tüketici fiyat endeksi, sanayi üretim endeksi, enflasyon, büyüme oranı gibi
çeşitli ekonomik değişkenlerden etkilenebilmektedir.
Literatürde döviz kuru geçişi ile ilgili çeşitli çalışmalar yapılmıştır. Yapılan çalışmalarda
döviz kuru değişimlerinin fiyatlara etkisini tespit etmek için vektör otoregresif(VAR)
metodolojisi kullanılmıştır. McCarthy(1999) da bazı gelişmiş ülkeler için genel fiyat
seviyesi üzerindeki döviz kuru geçişi araştırılmıştır. Ülkelerin çoğunda, tüketici fiyatları
için döviz kuru geçişi anlamlı bulunmuştur. Ayrıca, gelişmiş ekonomiler üzerinde çeşitli
ampirik çalışmalar sunulmuştur. Bu çalışmaların çoğunda döviz kuru geçişinin
tamamlanmamış olduğu gözlenmiştir (Menon 1995a).
Fiyatlardaki azalma seviyesi, geçiş mekanizması için önemlidir. Mart 2003’ten itibaren
ABD Dolarındaki artış trendinin enflasyon üzerinde çok fazla etkisinin olduğunu söylemek
zordur. Bundan dolayı, artış üzerindeki azalma etkisinde asimetriklik bulunabilir.
Asimetrinin bir türü ABD Dolarındaki artışa karşı azalmadır. Asimetri sıfır etrafında
olmayabilir fakat sıfıra yakın pozitif bir sayı etrafında olması beklenmektedir.
Bu çalışmada, Türkiye ekonomisinin temel makro ekonomik değişkenleri üzerindeki döviz
kuru geçişi, eşik vektör otoregresif tekniği ile araştırılmıştır. Çalışmada büyüme oranı,
enflasyon, spread ve döviz kuru değişkenleri kullanılmıştır. Ayrıca kullanılan bu
değişkenler aylık frekansta ölçülmüş olup 1987:01-2007:01 dönem aralığını kapsamaktadır.
43
Bu çalışmadaki amaç, 1987:01-2007:01 dönem aralığı için Türkiye ekonomisinin temel
makro ekonomik değişkenleri üzerindeki döviz kuru geçişi eşik değerini tahmin etmektir.
Ayrıca tahmin edilen eşik değer yardımı ile döviz kuru geçişinin hangi dönemden sonra
etkili olduğu tespit edilecektir. Aşağıda çalışmada kullanılan metodoloji, veri ve bulgular
açıklanmaktadır.
5.1 Metodoloji
Bu çalışmada Türkiye’deki döviz kuru geçişi eşik değerini tespit etmek için Balke(2000)
tarafından önerilen eşik vektör otoregresif model(TVAR) kullanılmıştır. Eşik vektör
otoregresif model kullanılmasının nedeni döviz kuru serisindeki lineer olmayan yayılımdır.
Çalışmada lineer olmayan yayılımı incelemek ve eşik değeri tespit etmek için kullanılan
model aşağıda verilmiştir:
Yt = A1Yt + B1 ( L)Yt −1 + ( A2Yt + B 2 ( L)Yt −1 ) I (ct − d > γ ) + et
%
%
%
%
%
%
(5.1.1)
Burada Yt ; büyüme oranı, enflasyon, spread ve döviz kuru değişkenlerini içermektedir.
%
Ayrıca spread değişkeni faiz oranları arasındaki fark olarak alınmıştır. Ayrıca, et hata
%
1
2
1
2
terimlerini, B ( L) ve B ( L) gecikme matrislerini göstermektedir. A ve A döviz kuru
geçişinin etkili olduğu dönem ile önceki dönem arasındaki ilişkiyi göstermektedir.
Ayrıca modelde bulunan ct − d eşik değişkendir ve Ι(ct − d > γ ) gösterge fonksiyonu aşağıdaki
gibi tanımlanmaktadır:
1 , ct −d > γ
Ι(ct − d > γ ) =
d .d .
0 ,
(5.1.2)
44
Modelde yer alan gecikme uzunluğu vektör otoregresif model yardımı ile belirlenebilir.
Çalışmada gecikme uzunluğu d = 1 olarak alındı (Balke 2000).
Doğrusal olmayan VAR modellerinin dinamik özellikleri çerçevesinde bir fikir elde etmek
için etki-tepki analizi kullanılabilir. Modelin doğrusal olmayan yapısı etki-tepki analizini
doğrusal modellere göre daha karmaşık hale getirmektedir. Etki-tepki fonksiyonu; et nin
%
değeri biliniyorken, Yt + k ’nın koşullu beklenen değerindeki değişimdir ve
E Yt + k Ωt −1 , et − E Yt + k Ωt −1
(5.1.3)
şeklinde ifade edilebilir. Burada Ωt −1 üzerinde çalıştığımız kümeyi göstermektedir. Ayrıca,
Ωt −1 bilgi kümesi olarak adlandırılır.
5.2 Veri ve Bulgular
Çalışmada büyüme oranı, enflasyon, spread ve döviz kuru değişkenleri kullanılmıştır ve
kullanılan bu değişkenler aylık frekansta ölçülmüş olup 1987:01-2007:01 dönem aralığını
kapsamaktadır.
Çalışmada büyüme oranı ve enflasyon serileri sırasıyla aşağıdaki şekilde hesaplanmıştır:
X t = 100 × log ( (ip )t /(ip)t −1 )
(5.2.1)
Yt = 100 × log((cpi )t /(cpi )t −1 )
(5.2.2)
45
Burada; X t büyüme oranını, Yt enflasyonu göstermektedir. Ayrıca ip ve cpi ise sırasıyla,
sanayi üretim endeksini(industrial production index) ve tüketici fiyat endeksini(consumer
price index) göstermektedir.
Yukarıda verilen eşik vektör otoregresif model yardımıyla analizler yapılmıştır. Eşik
değerin tahminine ilişkin istatistikler çizelge 5.1 de gösterilmiştir. Döviz kuru geçişi eşik
değeri 0.0498 olarak tahmin edilmiştir. Hesaplanan büyüme oranı serisinde bu değerin
2002:02 dönemine denk geldiği gözlenmiştir. Çizelgedeki p değerleri yardımı ile eşik
değerin anlamlı olmadığını iddia eden yokluk hipotezinin %5 anlamlılık düzeyinde red
edildiği anlaşılmaktadır.
Çizelge 5.1 Eşik değerin tahmini ve test istatistikleri
Eşik
Eşik Değişkenin
Değişken
Tahmini
Döviz Kuru
MA(2), d = 1
γ = 0.0498
Wald İstatistikleri
Sup-
Avg-
Exp-
117.58
73.08
54.95
(0.000)*
(0.000)*
(0.000)*
* eşik değeri anlamlı değildir yokluk hipotezini %5 anlamlılık düzeyinde red edildiğini göstermektedir
Dört değişkenli eşik vektör otoregresif modelini kullandığımız çalışmada enflasyon, spread
ve döviz kurundaki ±1 standart sapmalık şoklar karşısında büyüme oranının nasıl bir tepki
verdiği etki-tepki fonksiyonları yardımı ile incelenmiştir. Etki-tepki fonksiyonları şu
şekildedir:
46
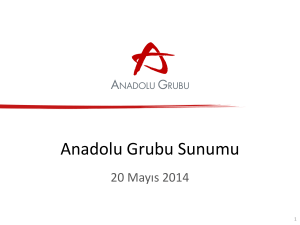
Şekil 5.1 Büyüme oranının gecikmelerine etkisi
Şekil 5.1 de büyüme oranının gecikmelerine verilen şokların büyüme oranına olan etkisi
gösterilmektedir. Etki-tepki fonksiyonu grafiğine göre büyüme oranının gecikmelerinde
meydana gelen ±1 standart sapmalık şokların kendisine olan etkisi 7 dönem sürmektedir.
Ayrıca büyüme oranının gecikmelerinde meydana gelen negatif şoklara verilen ilk tepki
negatif bölgeden başlayarak iki bölge arasında gidip gelmektedir. Pozitif şoklara verilen ilk
tepki ise pozitif bölgeden başlayarak iki bölge arasında gidip gelmektedir.
47
Şekil 5.2 Enflasyonun büyüme oranına etkisi
Şekil 5.2 de enflasyonda meydana gelen ±1 standart sapmalık şokların büyüme oranına
etkisi gösterilmektedir. Etki-tepki fonksiyonu grafiğine göre enflasyonda meydana gelen
±1 standart sapmalık şokların büyüme oranına olan etkisi yaklaşık 8 dönem sürmektedir.
Şokların etkisi 8. dönemden sonra giderek azalmaktadır.
48
Şekil 5.3 Spreadin büyüme oranına etkisi
Şekil 5.3 de spread de meydana gelen ±1 standart sapmalık şokların büyüme oranına etkisi
gösterilmektedir. Etki-tepki fonksiyonu grafiğine göre spread de meydana gelen
±1
standart sapmalık şokların büyüme oranına olan etkisi belli bir süre sonra giderek sıfıra
yaklaşmaktadır.
49
Şekil 5.4 Kurdaki değişikliğin büyüme oranına etkisi
Şekil 5.4 de döviz kuruna verilen şokların büyüme oranına olan etkisi gösterilmektedir.
Etki-tepki fonksiyonu grafiğine göre döviz kurunda meydana gelen ±1 standart sapmalık
şokların büyüme oranına olan etkisi 8 dönem sürmektedir. Şokların etkisi 8. dönemden
sonra azalmaktadır.
Enflasyon, spread ve döviz kuru değişkenlerine verilen ±1 standart sapmalık şokların
büyüme oranına etkisinin ortalama 7-8 dönem sürdüğü ve bu dönemlerden sonra şokların
büyüme oranı üzerindeki etkisinin sıfıra yaklaştığı gözlenmiştir.
50
6. SONUÇ
Bu çalışmada, Türkiye ekonomisinin temel makro ekonomik değişkenleri üzerindeki döviz
kuru geçişi, eşik vektör otoregresif tekniği ile araştırılmıştır. Çalışmanın birinci derece
sonuçları şu şekilde özetlenebilir:
Eşik vektör otoregresif tekniği ile elde edilen bulgularda, 1987:01-2007:01 dönemi için
Türkiye ekonomisinin temel makro ekonomik değişkenleri üzerindeki döviz kuru geçişi
eşik değerinin 0.0498 olduğu ve bu değerin 2002:02 dönemine denk geldiği bulunmuştur.
Ayrıca döviz kuru serisinde lineer olmayan bir yayılım olduğu gözlenmiştir. Etki-tepki
fonksiyonları yardımı ile enflasyon, spread ve döviz kuru serilerine verilen pozitif ve
negatif şokların büyüme oranına etkisinin ortalama 7-8 dönem sürdüğü ve daha sonra
şokların büyüme oranı üzerindeki etkisinin kaybolma eğilimi gösterdiği gözlenmiştir.
51
KAYNAKLAR
Akdi, Y. 2003. Zaman Serileri Analizi , Bıçaklar Kitabevi, Ankara.
Arat, K. 2003. Türkiye'de Optimum Döviz Kuru Rejimi Seçimi ve Döviz Kurlarından
Fiyatlara Geçiş Etkisinin İncelenmesi, Türkiye Cumhuriyet Merkez Bankası Dış
İlişkiler Genel Müdürlüğü, Ankara.
Balke, N.S. 2000. Credit and Economic Activity: Credit Regimes and Nonlinear
Propagation of Shocks, The Review of Economics and Statistics, v. 82, pp. 344-349.
Berument, H. 2007. Measuring Monetory Policy for a Small Open Economy-Turkey,
Journal of Macroeconomics.
Brockwell P. J. and Davis R. A. 1987. Time Series: Theory and Methods , SpringerVerlang, New York.
Dickey A.D., Belli W.R. and Miller R. B. 1986. Unit Roots in Time Series Models: Tests
and Implications, The American Statistician, Vol. 40, No.1.
Enders, W. 1995. Applied Econometric Time Series , Canada, sayfa.460.
Fuller, W. A. 1976. Introduction to Statistical Time Series , New York.
Granger C.W.J. and Newbold P. 1986. Forecasting Economic Time Series, Academic Press
Hamilton J. D. 1994. Time Series Analysis, Princeton University Pres, sayfa.799.
McCarthy, J. 1999. Pass-Through of Exchange Rates and Import Prices to Domestic
Inflation in Some Industrialized Economies, BIS Working Papers, No.79.
Menon, J. 1995a. Exchange Rate Pass-Through, Journal of Economic Surveys, Vol. 9,
No. 2, June, pp. 197-231.
Menon, J. 1995b. Exchange Rates and Import Prices for a Small Open Economy, Applied
Economics, Vol. 27, No. 3, March, pp. 297-301.
Özgen, F.B. ve Güloğlu, B. 2004. Türkiye’de İç Borçların İktisadi Etkilerinin VAR
Tekniğiyle Analizi, ODTÜ Gelişme Dergisi, 31 Haziran, 2004, 93-114.
52
Saçkan, O. 2006. Genel fiyat düzeyinin belirlenmesinde para ve maliye politikası dominant
rejimler: Türkiye örneği, 1988-2005, Türkiye Cumhuriyet Merkez Bankası Emisyon
Genel Müdürlüğü, Ankara.
Yalçın, Y. 2002. Stokastik Birim Kök Süreci Üzerine Bir Araştırma: Teori ve Uygulama,
Gazi Üniversitesi Sosyal Bilimler Enstitüsü, Ankara.
Wei, W. S. M. 1990. Time Series Analysis, Addision Wesley Pub. Comp., California
53
ÖZGEÇMİŞ
Adı Soyadı: Keziban TEKİN
Doğum Yeri: Uşak
Doğum Tarihi: 02/10/1982
Medeni Hali: Bekar
Yabancı Dili: İngilizce
Eğitim Durumu
Lise: Anıttepe Lisesi, 1999
Lisans: Ankara Üniversitesi Fen Fakültesi İstatistik Bölümü, 2005
Yüksek Lisans: Ankara Üniversitesi Fen Bilimleri Enstitüsü İstatistik Anabilim Dalı, 2008
Çalıştığı Kurum ve Yıl
Ankara Üniversitesi Fen Fakültesi İstatistik Bölümü Araştırma Görevlisi, 2005 -
Yayınları
Özdemir, Z A; Tekin, K. ; Berument, H.; Akdi, Y., Türkiye’ de Döviz Kuru Geçişi:
Şokların Lineer Olmayan Yayılımı 5. İstatistik Kongresi, 20-24 Mayıs 2007, Antalya
54