Politeknik Dergisi
Cilt:10 Say : 1 s.27-32, 2007
Journal of Polytechnic
Vol: 10 No: 1 pp.27-32, 2007
Mekatronik Sistemlerin Tasarlanmas nda PSPICE
Kullan m na Bir Örnek
Yetkin TATAR* Servet TUNCER**
F.Ü.Müh.Fak. Bilgisayar Müh. Böl.-Elaz 8
**
F.Ü.Teknik E8itim Fak. Elektronik-Bilgisayar E8t. Böl.-ELAZI;
*
ÖZET
Bu makalede, de8i<ik bilim dallar n n bir birle<imi olan mekatronik sistemlerin analizi ve modellenmesi için PSPICE
kullan m aç klanm <t r. Çal < lan sistem; kaskad ba8l be<-seviyeli bir inverter, onun besledi8i bir üç fazl asenkron motor ve
miline ba8l bir yükten olu<maktad r. Motorun üretmesi gereken moment; dinamik moment, yük momenti ve sürtünme
momentlerinin toplam d r. Bu <ekilde olu<turulan sistemin ünitelerinin de8i<ik modelleme seviyelerindeki a<amalar aç klanm <
ve sonuçlar incelenmi<tir. Ayr ca model kütüphanelerinin olu<turulmas ve kullan lmas ndan bahsedilmi<tir.
Anahtar Kelimeler: Mekatronik sistemler, simülasyon, PSPICE, çok seviyeli inverter.
An Example Using PSPICE for Design of
Mechatronical Systems
ABSTRACT
In this paper, the usage of PSPICE has been explained for the analysis and modeling of the mechatronical system which
is the combination of the various science branches. The studied system consists of a cascaded five-level inverter, three-phase
induction motor feeding by this inverter and the load connected to the motor shaft. The torque that should be produced by the
motor is the sum of dynamic torque, load torque and friction torque. The stages in the different modeling levels of the system
unities have been explained and their results have been investigated. In addition, the constitution and usage of model libraries
have been mentioned.
Keywords: Mechatronical systems, simulation, PSPICE, multilevel inverter.
da8 t k parametreli diferansiyel denklemler ile modellenirler. Da8 t k parametreli modeller k smi diferansiyel
denklemler ile tarif edilir ve sonlu elemanlar yöntemi ile
çözülürler. Y 8 n parametreli modeller ise diferansiyelcebrik denklemlerdir. Birçok mühendislik sistemleri y 8 n parametreli model denklemleridir. Bu denklemler
Euler, Runge-Kutta, Gear teknikleri ile çözülmektedirler. E8er sistem denklemleri do8rusal olmayan cebrik
denklemler <eklinde ifade edilebiliyorsa NewtonRaphson tekni8i en uygun bir çözüm algoritmas olmaktad r. Bilgisayar destekli sistemlerde ise sistemleri
ayr k zamanda modelleyen fark denklemleri kullan larak çözüm gerçekle<tirilmektedir.
1.G R
Bir mekatronik sistem; makina, elektrik-elektronik ve kontrol disiplinlerinin birle<iminden olu<maktad r (1,2). Hareketli kontrol sistemleri mekatronik sistemlerin temelini olu<turur. Bir hareketli kontrol sistemi; güç kayna8 , güç sürme devreleri, elektro hidrolikmekanik dönü<türücü, iletim, yük ve duyargalardan ibarettir. Bunlar n kontrol edilmesi ise görev kontrol blo8u
ve güç sürme kontrol blo8u ile yap lmaktad r.
Mekatronik sistemlerde farkl üniteler farkl enerji
formlar nda (mekanik, elektrik, hidrolik) çal <abilmektedirler.
Mekatronik sistemi gerçekle<tirmeden önce sistemi olu<turan birimlerin modellenmesi ve simülasyonu
yap l r. Bu i<lemleri sa8layan farkl yaz l mlar mevcuttur. Bu <ekilde yap lan simülasyon ve modellemeler,
gerçek dünyadaki tasarlanacak sistemle do8rudan ili<kili
olmal d r (3).
Fonksiyonel tasar m a<amas nda MATLAB,
XMATH v.b programlar kullan larak sistemi modelleyen matematiksel denklemler uygun say sal çözümleme
yöntemleri ile çözülüp, sistemin geçici ve sürekli durum
davran < hakk nda bilgi elde edilmektedir. Fiziksel tasar m a<amas , farkl alt sistemler aras ndaki enerji etkile<imini, dönü<ümünü modellemektedir. Sürekli zamanl
sistemlerde fiziksel seviyede modelleme
multiport ve bondgraf metotlar yla sa8lanabilir (1,4). Bu
metotlar n her ikisi de matematiksel gösterime dayan r
ve çok disiplinli sistemlerin modellenmesi için kullan l r. Fiziksel seviye simülatörleri; prosedürsel ve prosedürsel olmayan olarak iki s n fta toplan r. Prosedürsel
Farkl bilim dallar n n birle<iminden olu<an
mekatronik sistemlerin tasar m a<amas ; kavramsal tasar m, fonksiyonel tasar m ve fiziksel tasar m gibi ad mlardan olu<maktad r. Kavramsal tasar m a<amas nda,
sistemi olu<turacak ünitelerin seçimi yap l r. Fonksiyonel tasar m ise sistemin modellenmesine kar< l k gelmektedir. Sürekli zamanl sistemler y 8 n parametreli ve
Digital Object Identifier 10.2339/2007.10.1.27-32
27
Yetkin TATAR, Servet TUNCER / POLMTEKNMK DERGMSM, CMLT 10, SAYI 1, 2007
simülatörler sistemi görev tan mlayan kesin kontrol deyimleriyle olu<tururlar. Oldukça karma< k bir kullan ma
sahiptirler. Prosedürsel olmayan simülatörler ise sistemi
primitifler ve parametre de8erlerini birbirine ba8layarak
olu<turulmaktad r. Bu simülatörler kullan c aç s ndan
daha basit ve kullan <l oldu8undan daha fazla kullan l r.
V21 71 811 0
Fiziksel seviye simülatörlerinden en çok kullan lanlara örnek olarak ADAMS (Genel Amaçl Mekanizma Analiz Program ), PSPICE (Analog ElektrikElektronik Devre Simülatörü) ve SpeedUp (Kimyasal
Prosesler için) verilebilir (3-6). PSPICE fiziksel tasar m
seviyesinde elektrik-elektronik gibi tek bir bilim dal
için simülatör olarak kullan lmakla beraber, fonksiyonel
tasar m seviyesinde de birçok matematiksel model
bloklar n n olu<turulmas yla birden fazla bilim dal n
bar nd ran sistemlerin modellenmesi ve simülasyonu
için kullan labilir.
..ENDS
V22 73 789 0
x13 811 76
3-faz a.c giri<
SDGM ile denetlenen
be<-seviyeli kaskad
inverter devresi
IRG4PC40UD; C G E
x14 789 77 20
IRG4PC40UD; C G E
.SUBCKT IRG4PC40UD 1 2 3 ; C G E
S1
S2
V
S3
S4
S 1'
S 2'
S 3'
S4'
V
V
V1
b
S1
S2
V
S3
S4
S3
S4
S 1'
S 2'
S1'
S2'
S3 '
S4 '
S 3'
S 4'
c
V
V2
V
H2
n
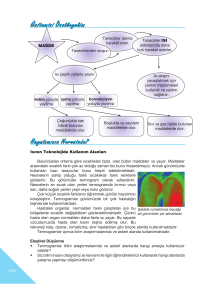
Pekil 2. Be<-seviyeli kaskad ba8l inverterin ba8lant <emas .
71
V21
76
V
My
811
S1
V11
77
73
V22
Mm
77
711
S2
74
V12
789
Yük
M
S2
S1
a
H1
Bu makalede; çok disiplinli (elektrik, mekanik)
bir sistemin modellenmesi ve simülasyonu için PSPICE
kullan m ve kütüphane olu<turulmas konular , çok seviyeli bir inverterle beslenen bir asenkron motorun davran <lar n simüle eden bir sistem üzerinde aç klanacakt r. Sistemin blok <emas Pekil.1’de verilmi<tir. Sistemde inverter simüle edilerek, ç k < i<aretleri asenkron
motoru ve yükü modelleyen fonksiyonel matematiksel
modele uygulan p analizler sonuçlar verilecektir.
Yal t ml d.c
kaynaklar
(6 adet)
73
S3
20
a
779
76
S4
20
Pekil 1. Sistemin blok <emas
H2 köprüsüne
2. ÇOK SEV YEL NVERTER N PSPICE
MODEL
Çok seviyeli kaskad ba8l inverterler tek fazl tam köprü
inverterlerin seri ba8lanmas ndan olu<turulmaktad r (7).
Be< seviyeli bir kaskad ba8l inverter devresi Pekil 2’ de
verilmi<tir. Pekil 3’te ise tam köprü devrenin PSPICE
modeli görülmektedir. Köprüde kullan lan anahtarlar
üretici
firma
International
Rectifier
(IR)’nin
IRG4PC40UD IGBT’lerinin PSPICE modelidir (8).
Model için her bir faz olu<turan tam köprü inverter yap s n n PSPICE kodlamas a<a8 da verilmi<tir. Bu <ekildeki köprülerin Pekil 2.’deki gibi ba8lanmas yla kaskad
be<-seviyeli inverter devresinin güç devresi modellenmi< olmaktad r.
.
V1 71 29 100V DC
Pekil 3. Be<-seviyeli kaskad ba8l inverterin bir faz tek köprü
yap s n n PSPICE için kullan lan modeli.
Pekil 2’de verilen inverterin güç devresindeki
anahtarlar do8al örneklemeli Sinüs-Üçgen Darbe Geni<lik Modülasyonlu (SDGM) i<aretler ile sürülmü<tür.
Bu modülasyon tekni8inde inverterin seviye say s na
ba8l olan ta< y c üçgen dalga i<aretler ile üç-fazl sinüzoidal referans i<aretlerin kar< la<t r lmas ile DGM’li
i<aretler elde edilmektedir (9). DGM’li i<aretleri elde
etmek için üretici firmas ndan elde edilen PSPICE
Opamp modelleri kullan lm <t r. Pekil 4’te be<-seviyeli
inverter için PSPICE’dan elde edilen ta< y c ve referans
i<aretler görülmektedir.
**1.KÖPRÜNÜN SA; KOLU
V11 71 711 0
V12 74 779
0
x11 711 72
74
IRG4PC40UD; C G E
x12 779 76
20
IRG4PC40UD; C G E
Pekil 4. Be<-seviyeli inverter için ta< y c ve referans i<aretler
**1.KÖPRÜNÜN SOL KOLU
28
MEKATRONMK SMSTEMLERMN TASARLANMASINDA PSPMCE KULLANIMINA … / POLMTEKNMK DERGMSM, CMLT 10, SAYI 1, 2007
Motorun stator ak mlar ise a<a8 da verilen
denklem yard m yla elde edilebilir.
3. ÜÇ FAZLI MOTOR VE MEKAN K
MOMENT N PSPICE BENZET M
Modellenen üç-fazl be<-seviyeli inverter devresi için yük olarak bir üç-fazl asenkron motor kullan lm <t r. Baz ihmaller yap larak üç fazl asenkron motorun davran < n incelemek için a<a8 daki denklemlerin
kullan lmas yeterlidir (1,10).
r
r
r
di
d ( ir e j )
r
u s =Rs is + Ls s + M
dt
dt
r j
r
r
d ( is e
)
di
r
(1)
u r =Rr ir + Lr r + M
dt
dt
N pM
r r
Mm =
Im is ( ir e j )*
3
M m M y = M d + M sür
[
]
u s ve u r üç-fazl stator ve
rotor gerilimleri, M m motor momenti, M y yük momenti ve M d dinamik moment ve Msür sürtünme momentidir. Bu ba8 nt lar n geli<tirilmesi ile asenkron
motorun üç-fazl modeli do8rusal olmayan diferansiyel
denklem tak mlar n n çözülmesi ile elde edilmektedir.
Analog simülatörler ile gerçekle<tirilebilecek bu üç-fazl
model PSPICE’ta Opamp’l devrelerle yap lacak diferansiyel denklem çözücüleri ile rahatl kla olu<turulabilmektedir. Asenkron motorun çokça kullan lan bir modeli de, d-q sistem modelidir. Burada üç-fazl sistem
uygun dönü<üm ba8 nt lar yla d-q eksen sistemine dönü<türülüp i<lemler burada gerçekle<tirilir ve sonuçlar
uygun bir <ekilde tekrar üç fazl sisteme dönü<türülür.
Üç-fazl stator faz gerilimlerinden, d-q eksen tak m na
dönü<üm için a<a8 da verilen (2) denklemi kullan larak
gerçekle<tirilebilir.
u sq =
1
( u s 2 + u s3 )
2
3
( us2
2
(2)
+M
dt
dt
di
di
d
u dr =Rr idr + M ds + Lr dr +
( Miqs + Lr iqr )
dt
dt
dt
diqs
diqr d
u qr =Rr iqr + M
( Mids + Lr idr )
+ Lr
+
dt
dt
dt
N pM
Mm =
( i sq ird i sd irq )
3
1
isd
2
is 3 =
2
3
3
1
isq
isd +
2
2
3
isq
2
(4)
dw
dt
+ M sür
XM
di
di
u ds =Rs ids + Ls ds + M dr
dt
dt
u qs =Rs iqs + Ls
2
3
(5)
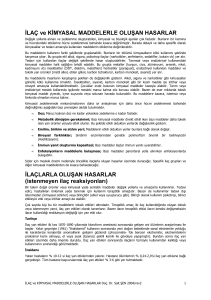
Eylemsizlik kütlesi (j) enerjiyi kapasitif bir etkiyle depolayan bir eleman gibi modellenebilir. Msür
sürtünme momentinin yap <kanl k sürtünme bile<eni
dönel sönümleyici olarak ta adland r lmaktad r. Dönel
sönümleyici katsay s B olarak tan mlan rsa yap <kanl k
sürtünmesi momenti; B ile w aç sal h z n çarp m <eklindedir. Pekil 5’de mekanik momentin bile<enleri görülmektedir. Burada XM eylemsizlik momentini, XB
yap <kanl k sürtünmesi momentini, XS statik ve dinamik sürtünme momentlerini temsil eder. E8er yük momenti h zdan ba8 ms z karakterde ise sürtünme momenti
içerisine kat labilir. Mekanik momentin elektriksel
devre elemanlar ile modellenebilmesini sa8layan, mekanik-elektrik dönü<üm analojisi ise Pekil 6 ’da verilmi<tir.
Burada, u s1 , u s 2 ve u s3 stator faz gerilimleridir. Üç-fazl asenkron motorun d-q eksen sisteminde
geçerli olan denklemleri a<a8 da verilmi<tir (1,10).
diqr
is 2 =
M mek = M y + j
u s3 )
diqs
2
isd
3
Motor miline yans yan mekanik moment; yük
momenti (My) , dinamik (hareket-ivmelendirme, Md)
moment ve sürtünme (Msür) momentlerinden olu<ur.
Sürtünme momentinin de; yap <kanl k (viskozite) sürtünme, statik sürtünme ve kinetik sürtünme momenti
olarak üç bile<eni vard r. Yap <kanl k sürtünme momenti dönü< h z yla do8rudan orant l d r. Statik sürtünme momenti yüzeyin özelliklerine ba8l olarak olu<ur ve genellikle ihmal edilir. Kinetik sürtünme momenti ise h zdan ba8 ms z olarak olu<ur. Kuru sürtünme
olarak ta adland r lan bu moment, dönü< yönünden ba8 ms z olarak bir yük gibi davran r (11) . Denklem
(5)’te mekanik momentin bile<enleri verilmektedir.
Bu ba8 nt lardaki
u sd = u s1
is1 =
XB
(3)
XS
Pekil 5. Mekanik momentin bile<enleri
29
Yetkin TATAR, Servet TUNCER / POLMTEKNMK DERGMSM, CMLT 10, SAYI 1, 2007
C
kütle
R
Rc
Ri G f
sönüm
+
-
Es
Rs
sürtünme
Pekil 6. Mekanik moment bile<enlerinin elektriksel benzetimi
Burada; eylemsizlik kütlesi bir RC devresi ile,
sönüm katsay s B, uygun de8erli bir direnç de8eri (R)
ile verilmi<tir. Dinamik ve statik sürtünme momenti ise
sadece sistem parametreleri ile hesaplanamayaca8 ndan,
davran < modeli ile elde edilir. Bu momentlerin davran <
modeli ise; Gf ak m kayna8 üzerindeki gerilime ba8l
olan bir gerilim kontrollü gerilim kayna8 ile verilebilir
(1).
PSPICE’ta mekatronik sistemi olu<turan bile<enlerin bir k sm fonksiyonel tasar m seviyesinde
(asenkron motor) ve bir k sm da fiziksel tasar m (fiziksel simülatörler kullan larak) seviyesinde (inverter ve
dinamik moment) olu<turularak sistem analiz edilebilmektedir. Fonksiyonel tasar m seviyesindeki modeller
PSPICE’ta genellikle, bloklar, cebrik ve diferansiyel
denklemler, transfer fonksiyonlar vb. matematiksel
fonksiyonlardan olu<maktad r. Bu <ekilde olu<turulmu<
eleman modelleri bir kütüphaneden (mekatro.lib vb.)
ça8r larak program içerisinde kullan lmaktad r. A<a8 daki PSPICE program parças , motor ve mekanik moment modellerinin mekatro.lib isimli bir dosyadan ça8r l p kullan lmas na bir örnektir.
Pekil 7. (a) Be<-seviyeli inverterin ç k < faz-nötr gerilimi
(b) Faz-nötr geriliminin harmonik analizi.
xmot 1210 2210 3210 w0 acmot3f params: Rs={Rs}
Rr={Rr} M={M} Ls={Ls} Lr={Lr}
+Jm={Jm} B={B} Wm={Wm} Np={Np}
.param Rs=3.35 Rr=1.99 Ls=0.17 Lr=0.17 +M=0.16373
Np=2 Jm=.015 B=15n Wm=5 Np=2
.param w0=0
; Ba<lang ç h z
Pekil 8. (a) Be<-seviyeli inverterin ç k < faz-faz gerilimi,
(b)Faz-faz geriliminin harmonik analizi.
xload w mass params: m=0.015
.lib d:\mekatro.lib; d sürücüsündeki Mekatronik
kütüphanesi dosyas
Burada xmot ve xload, mekatro.lib dosya isimli
kütüphaneden ça8r lan motor ve yük momentini modelleyen alt devrelerdir. Kullan c n n gerek motor ve dinamik moment gerek sürtünme momentiyle ilgili de8erleri seçebilmesi, “.param” komutuyla kolayl kla yap labilir.
4. S MÜLASYON SONUÇLARI
Pekil 7’de be<-seviyeli inverterin faz-nötr ç k <
gerilimi ve onun harmonik analizi görülmektedir. Pekil
8’de ise ayn <artlarda faz-faz gerilimi ve onun
harmonik analizi verilmi<tir. Harmonik analizleri,
PSPICE program n n FFT komutuyla elde edilmi<tir.
Analizlerden de görüldü8ü gibi faz ve faz-faz gerilimlerinde olu<an harmonik bile<enler, anahtarlama frekans
ve katlar civar nda olu<maktad r. Dolay s yla anahtarlama frekans yüksek seçilerek istenmeyen yak n
harmoniklerin olu<mas önlenmi<tir.
Bölüm 3’te aç klanan PSPICE modellerine göre
çal <t r lan PSPICE program ndan elde edilen sonuçlar
Pekil 7-14 aras nda verilmi<tir. Analizlerde, kaskad
ba8l inverterin her bir köprüsü 200 V dc izoleli
kaynaktan beslenmi< olup, ç k < frekans 50 Hz, anahtarlama frekans 2,25 kHz ve modülasyon indeksi ise
0,8 olarak al nm <t r. Simülasyon çal <malar nda ek’te
parametreleri verilen bir asenkron motor kullan lm <t r.
Pekil 9’da üç-fazl motor ak m n n de8i<imi verilmektedir. Pekil 10’da fiziksel tasar m seviyesinde
modellenmi< inverterin bir anahtar (IGBT) için iletime
girme ve kesime gitme geçici durumlar ndaki anahtar
ak m ve geriliminin zamana göre de8i<imi görülmektedir. Pekil 11’de ise inverterin bir anahtar için iletim ve
kesim durumlar nda anahtarlama kay p gücünün zamana
göre de8i<imi verilmi<tir.
30
MEKATRONMK SMSTEMLERMN TASARLANMASINDA PSPMCE KULLANIMINA … / POLMTEKNMK DERGMSM, CMLT 10, SAYI 1, 2007
Pekil 12’de sinüzoidal kaynaktan beslenen motorun yol alma ve sürekli durum sürecindeki momentin
de8i<imi ve sürekli durum için momentin harmonik
analizi verilmi<tir. Pekil 13’te ise be<-seviyeli kaskad
ba8l inverterden beslenen motor momentinin zamana
göre de8i<imi, sürekli haldeki momentin de8i<imi ve
onun harmonik analizi görülmektedir. Ayn inverterden
beslenen motorun yüksüz çal <ma durumundaki, sürekli
durum momenti ve onun harmonik analizi ise Pekil
14’de verilmi<tir. Pekillerden de anla< laca8 gibi, sinüzoidal kaynaktan beslenen motor momentinde
harmonikler olu<mamaktad r. Ancak inverter ç k < ndan
beslenen motor momentinde az da olsa harmonikler
mevcuttur. Bu harmonikler faydal moment üretmezler
ancak, birbirine yak n tek ve çift say l bile<enler sal n m momentleri üretmektedirler.
Pekil 9. Üç fazl motor ak mlar
Pekil 10. Mnverterin herhangi bir anahtar n n iletime girme ve
kesime gitme geçici durumlar .
Pekil 11. Mnverterin herhangi bir anahtar için anahtarlama kay plar ile iletim kay plar n n de8i<imi.
Bu çal <mada oldu8u gibi, e8er yar iletken
anahtarlar gerçe8ine yak n bir <ekilde modellenebilirse
(PSPICE buna imkân vermektedir), üzerlerindeki s ya
harcanan kay p güç kolayl kla do8ru bir <ekilde elde
edilebilir. Bu durum Pekil 11’de görülmektedir. Buradan hareketle yar iletken anahtarlar için so8utucu hesaplamalar da kolayl kla yap labilir.
Pekil 13. Yüklü durumda be<-seviyeli inverterle beslenen motor için (a) momentinin zamana göre de8i<imi, (b)
sürekli durumda moment de8i<imi ve (c) sürekli durumda momentin harmonik analizi. (f=50 Hz, My =
5 Nm)
Pekil 12. Yüklü durumda sinüzoidal gerilimle beslenen motor
için (a) momentinin zamana göre de8i<imi, (b) momentin harmonik analizi (f=50 Hz, My = 5 Nm).
31
Yetkin TATAR, Servet TUNCER / POLMTEKNMK DERGMSM, CMLT 10, SAYI 1, 2007
denklemlerin çözümü yap labilmektedir. Bunun için
Opamp’lar n, integratör, toplay c , çarp c olarak kullanmas gerekir. Bu i<lem, PSPICE’ta Opamp’ n fiziksel
modelleri kullan larak gerçekle<tirilebilir.
Mekanik yük ise fiziksel simülatörler ile modellendi8inden, mekanik-elektriksel analoji dönü<üm katsay lar n n do8ru seçimi, bu sistemin modellenme do8rulu8uyla do8ru orant l olmaktad r. Mekatronik sistemlerde de8i<ik enerji formlar nda çal <an farkl üniteler mevcuttur. E8er sistem analizi PSPICE ile yap lacaksa, bu üniteler de8i<ik modelleme seviyelerinde modellenerek bir kütüphane olu<turulmal d r. Kullan lacak
sisteme göre, üniteler bu kütüphaneden ça8r l p, de8i<ken parametreler arac l 8 ile sisteme adapte edilmesi ile
analiz kolayl kla ba<ar labilir.
6. KAYNAKLAR
1. Scholliers J., Design and Simulation of Mechatronical
Systems, Final Report Human Capital and Mobility
Fellowship ERBCHBICT930534, VTT automation, 1995.
Pekil 14. Yüksüz durumda be<-seviyeli inverterle beslenen
motor için (a)sürekli durumda momentin de8i<imi,
(b) sürekli durumda momentin harmonik analizi.
(f=50 Hz, My = 0 Nm)
2. Bernardi M., Bley H., Schmitt B., New Approaches for
Developing Mechatronical Products in Multidisciplinary
Teamwork, The 35th CIRP-International Seminar on
Manufacturing Systems, 13-15 May, 2002.
5. SONUÇ
Bu makalede; basit mekatronik sistemlere bir örnek olarak ele al nan elektrik sürücü, motor ve mekanik
yükten olu<an sistemin PSPICE ile analiz edilebilmesi
için yap lacak i<lemler aç klanm <t r. Sistem be<-seviyeli kaskad ba8l bir üç fazl inverter, üç fazl bir
asenkron motor ve yük momenti, sürtünme momenti,
dinamik moment’ten olu<maktad r.
3. Amerongen J.V., Mechatronic Design, Mechatronics,
Volume 13, Issue 10, 1045-1066, 2003
4. Scholliers J., Yli P.T., A SPICE-based Library for
Mechatronic Systems, ISCAS’95, IEEE International
Symposium on Circuits and Systems, 668-671, 28 April-3
May 1995.
5. Kielkowski
York,1994.
Çok seviyeli inverterin tasarlanmas nda, PSPICE
fiziksel simülatör olarak kullan lm <t r. Mnverter güç
devresinde anahtar olarak kullan lan IRG4PC40UD
IGBT’lerinin PSPICE modelleri üretici firmas ndan temin edilen fiziksel tasar m modelidir. Kontrol devresinde kullan lan Opamp’larda da fiziksel seviye modeli
kullan lm <t r. Asenkron motor PSPICE’ta fonksiyonel
tasar m seviyesinde modellenmi< olup baz ihmaller ve
kabuller yap larak model denklemleri olu<turulmu<tur.
Dinamik moment, sürtünme momenti ve yük momenti
ise fiziksel tasar m modeli ile modellenmi<tir.
R.,Inside
SPICE,
McGraw-Hill,
New
6. Rashid M.H.,SPICE for Power Electronics and Electric
Power, Prentice Hall,1993
7. Rodriguez J., Lai J.S., Peng F.Z., Multilevel Inverters: A
Survey of Topologies, Controls, and Applications, IEEE
Transactions on Industry Electronics,724-737, 2002.
8. IGBT SpiceMod Library, International Rectifier, 1992.
9. Tuncer S., Tatar Y., Çok Seviyeli Kaskad Mnverterlerde
SPWM Tekni8inin Kullan m , SAU Fen Bilimleri
Enstitüsü Dergisi, Cilt 7, Say 2, 56-60, 2003.
Be<-seviyeli kaskad inverter için fiziksel tasar m
modeli kullan ld 8 ndan inverterle ilgili bütün elektriksel bilgiler gerçe8ine oldukça yak n bir <ekildedir. Örnek olarak, IGBT anahtarlar n iletim ve anahtarlama kay plar hesaplanabilir, anahtarlar n üzerindeki gerilim
dü<ümleri rahatl kla ölçülebilmektedir. Asenkron motor
fonksiyonel tasar m a<amas nda modellendi8inden,
analizler teorik olarak ideal durumlar için geçerlidir. Bu
çal <mada modelleme iki-fazl dönen eksen sisteminde
yap lm <t r. Bununla birlikte, motorun üç-fazl model
denklemleri kullan larak ta ba<ka bir dönü<üme gerek
duyulmadan, analog simülatörler ile bu diferansiyel
10. Bose B.K., Modern Power Electronics and AC Drives,
Prentice Hall, 2002.
11. Subrahmanyam V., Electric Drives , McGraw-Hill, New
Delhi, 1996
Ek. Kullan lan asenkron motorun parametreleri
Uf-f =380 V, f=50 Hz, p=2, Rs=3.35 , Rr=1.99
Ls=0.17 H, Lr=0.163 H, j=0.015 kgm2
32
,