Fark yükselticisi
D9
VS
RPOT
RVD2
RVD1
RL
LDR
LDR
9V DC güç kaynağı (VS), 1 adet LM324 entegre, 1 adet kırmızı LED,
1 adet 1k direnç( RL), 1 adet 100k potansiyometre (RPOT), 2 adet LDR, 2
adet 10k direnç (RVD1,RVD2),
Tersleyen bacağa bağlı LDR’nin üzerine düşen ışığın şiddeti artarsa LDR’nin
direnci düşer ve terslemeyen ve tersleyen bacaklar arasında pozitif bir
gerilim oluşturur. Terslemeyen ve tersleyen girişleri arasındaki bu pozitif
gerilim farkı Opamp tarafından yükseltilerek çıkış gerilimi doygun hale
gelir.Potansiyometre(RPOT) yardımı ile bacaklar arsındaki istenilen hassasiyet
ayarlanabilir.
38
Evirmeyen (noninverting)
yükseltici
VS
RF
D10
R
RVD1
RVD2
Vout
Vin
RL
9V DC güç kaynağı (VS), 1 adet LM324 entegre, 1 adet kırmızı LED, 1 adet
1k direnç( RL), 3 adet 100k direnç (RF, R, RVD1),1 adet 22k direnç (RVD2)
Opamp ‘ın kazancı, yani çıkış geriliminin terslemeyen bacağına uygulanan
gerileme oranı
formülü ile hesaplanabilir. Elde edilen çıkış gerilimi;
39
Mekanik H köprüsü ile DC motor yön kontrolü
D11
9V DC güç kaynağı (VS), 1 adet iki yollu
anahtar, 1 adet doğru akım (DC)
motoru
İki yollu anahtarın kontaklarının konumu
değiştirilerek, motorun kutuplarına
uygulanan gerilimin ve dolayısıyla
motorun da devir yönü değiştirilebilir.
VS
A1
VS
A2
A1
m
m
i
i
A4
A3
A4
m
A3
A2
40
Transistörlü H köprüsü ile
DC motor yön kontrolü
D12
VS
R
T1
G1
T2
m
R
G2
T3
T4
9V DC güç kaynağı (VS), 4 adet BD 135 Transistör (T1-T4) , 1 adet doğru
akım (DC) motoru, 2 adet anahtar (push-button), 4 adet 1 k direnç
G1 ve G2 girişine konulan anahtarlara basılarak motorunu devir kontrol
edilebilir. Her iki anahtara birden basılması halinde ise sistem de kısa
devre oluşur.R dirençleri ve T transistörleri kullanılan motora göre seçilir
ayrıca ani akım değişimlerinde motor bobininde oluşacak yüksek
gerilimleri (
) bastırmak için motor bobinine paralel olarak diyot
bağlanabilir.
41
Transistörlü DC motor hız kontrolü
D13
m
VS
R
RPOT
T
9V DC güç kaynağı (VS), 1 adet BD 135 Transistör, 1 adet doğru
akım (DC) motoru, 1 adet 1 k trimpot (RPOT), 1 adet 470 direnç
(R)
Transistörün beyzine bağlı trimpotun değeri değiştirilerek motorun
devir sayısı ayarlanabilir.R direnci trimpotun direnç değerinin 0
olması halinde transistörü koruma amaçlı amacı ile konulmuştur
ayrıca ani akım değişimlerinde motor bobininde oluşacak yüksek
gerilimleri (
) bastırmak için motor bobinine paralel olarak
diyot bağlanabilir.
42
Diyotlu DC motoru hız kontrolü
D14
VS
m
D
HIZ
KADEMELERI
D
D
D
D
9V DC güç kaynağı (VS), 5 adet 1N4001 diyot(D) , 1 adet doğru akım
(DC) motoru
İstenildiğinde kullanılacak bir seçici anahtar ile devreye seri bağlı
diyotların sayısı(n) ve dolayısıyla motor kutuplarındaki gerilimin ve motor
devrinin değeri değiştirilebilir.(devreye seri bağlı her bir diyot üzerinde
düşen gerilim=silikon diyotlar için 0.7V).Bu devrede ise toplam 5 adet seri
bağlı silikon diyot kullanıldığına göre motor kutuplarındaki gerilim;
VM=VS-n*0.7=9-5*0.7=5.5V
43
D15
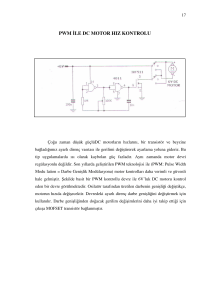
555 Entegresi ile PWM DC motor hız kontrolü
9V DC güç kaynağı (VS),, 1 adet kırmızı
LED, 1 adet 1k direnç (RT), 1 adet 110k direnç (RB) (potansiyometre
kullanılabilir), 1 adet 555 entegre, 1 adet
1K direnç (RA), 1 adet 1F kapasitör
(C), 1 adet DC motor (m), 1 adet BD135
transistör (T)
VS
RB
8
7
6
4
m
RA
RT
555
3
T
2
C
1
44