TÜRKİYE CUMHURİYETİ
ÇUKUROVA ÜNİVERSİTESİ
SOSYAL BİLİMLER ENSTİTÜSÜ
EKONOMETRİ ANABİLİM DALI
TEMEL BİLEŞENLER FAKTÖR ANALİZİNE DAYALI YAPAY SİNİR
AĞLARI MODELLERİ İLE İMKB 100 ENDEKS GETİRİLERİNİN TAHMİNİ
ZUHAT ERGİN
YÜKSEK LİSANS TEZİ
ADANA/2012
TÜRKİYE CUMHURİYETİ
ÇUKUROVA ÜNİVERSİTESİ
SOSYAL BİLİMLER ENSTİTÜSÜ
EKONOMETRİ ANABİLİM DALI
TEMEL BİLEŞENLER FAKTÖR ANALİZİNE DAYALI YAPAY SİNİR
AĞLARI MODELLERİ İLE İMKB 100 ENDEKS GETİRİLERİNİN TAHMİNİ
ZUHAT ERGİN
Danışman: Doç. Dr. Süleyman Bilgin KILIÇ
YÜKSEK LİSANS TEZİ
ADANA/2012
Çukurova Üniversitesi Sosyal Bilimler Enstitüsü Müdürlüğüne;
Bu çalışma, jürimiz tarafından Ekonometri Anabilim Dalında YÜKSEK
LİSANS TEZİ olarak kabul edilmiştir.
Başkan: Doç. Dr. Süleyman Bilgin KILIÇ
(Danışman)
Üye: Doç. Dr. M. Fatih CİN
Üye: Yrd. Doç. Dr. Ersin KIRAL
ONAY
Yukarıdaki imzaların, adı geçen öğretim elemanlarına ait olduklarını onaylıyorum.
…./…./2012
Prof. Dr. Azmi YALÇIN
Enstitü Müdürü
NOT: Bu tezde kullanılan ve başka kaynaktan yapılan bildirişlerin, çizelge, şekil ve
fotoğrafların kaynak gösterilmeden kullanımı, 5846 Sayılı Fikir ve Sanat Eserleri
Kanunu’ndaki hükümlere tabidir.
i
ÖZET
TEMEL BİLEŞENLER FAKTÖR ANALİZİNE DAYALI YAPAY SİNİR
AĞLARI MODELLERİ İLE İMKB 100 ENDEKS GETİRİLERİNİN TAHMİNİ
Zuhat ERGİN
Yüksek Lisans Tezi, Ekonometri Anabilim Dalı
Danışman: Doç. Dr. Süleyman Bilgin KILIÇ
Temmuz 2012, 53 sayfa
Bu çalışmada amaç, temel bileşen faktör analizine dayalı yapay sinir ağları
modelleri ile İMKB 100 endeksinin getirisi tahmin edilmeye çalışılmıştır. Bu çalışmada
02.01.1997-30.12.2011 tarihleri arasındaki İMKB 100 endeksi günlük getirileri
kullanılarak yarınki getiri tahmin edilmeye çalışılmıştır. Çalışma beş bölümden
oluşmaktadır. Birinci bölümde çalışmanın amacı, önemi ve yöntemi hakkında bilgi
verilmiştir. İkinci bölümde yapay sinir ağlarının yapısı, temel elemanları, avantajları,
dezavantajları, uygulama alanları, katmanları, sınıflandırılması ve işleyişi hakkında bilgi
verilmiştir. Üçüncü bölümde temel bileşen faktör analizinin aşamaları ile ilgili
hesaplamalara yer verilmiştir. Dördüncü bölümde uygulamaya yer verilmiştir. Son
bölümde ise uygulamada tahmin edilen modele ve bunun üzerine yapılan yorumlara yer
verilmiştir.
Anahtar Kelimeler: Yapay Sinir Ağı, Temel Bileşen Faktör Analizi, Getiri Tahmini
ii
ABSTRACT
PREDICTION OF ISE 100 INDEX RETURNS BY ARTIFICIAL NEURAL
NETWORK MODEL BASED ON PRINCIPAL COMPONENT FACTOR
ANALYSIS
Zuhat ERGİN
Master Thesis, Department of Econometrics
Supervisor: Doç. Dr. Süleyman Bilgin KILIÇ
July 2012, 53 Pages
In this study, ISE 100 index return is estimated by using Artificial Neural
Network model based on the Principal Component Factor Analysis. The data covers the
period of 02.01.1997-30.12.2011 and consist of the daily returns of ISE 100 index,
Dollar and Gold prices. The study consists of five sections. In the first section, we
describe the purpose of study, method and about the importance of study. In the second
section, we describe the basic elements of Artificial Neural Network model. In the third
section, we describe the Principal Component Factor Analysis. In the fourth section,
application are given, and finally in the fifth section we give the empirical results of the
study and conclusion.
Keywords: Artificial Neural Networks, Principal Component Factor Analysis, Estimate
Return
iii
ÖNSÖZ
Bu tez çalışmasında beni yönlendiren, her türlü eksikliklerimi tamamlayan ve
araştırmalarımda bana her zaman yol gösteren Danışman Hocam Doç. Dr. Süleyman
Bilgin KILIÇ’a ve eğitim hayatım boyunca maddi ve manevi desteklerini esirgemeyen
aileme ve dostlarıma sonsuz teşekkürlerimi ve saygılarımı sunarım.
Zuhat ERGİN
iv
İÇİNDEKİLER
Sayfa
ÖZET……………………………………………………………………….…………....i
ABSTRACT …………………………………………………………………………....ii
ÖNSÖZ…………………………………………………………….…………………...iii
KISALTMALAR LİSTESİ……………………………………….……………….....vii
TABLOLAR LİSTESİ……………………………………….…….………………...viii
ŞEKİLLER LİSTESİ………………………………………………………….….…...ix
I. BÖLÜM
GİRİŞ
1.1. Çalışmanın Amacı …………………………………………………………………..2
1.2. Çalışmanın Önemi ve Yöntemi……………………………………………………...2
1.3. Çalışmanın Sınırlılıkları……………………………………………………………..3
II. BÖLÜM
YAPAY SİNİR AĞLARI
2.1. Biyolojik Sinir Hücresi………………………………………….…………….…….4
2.2. Yapay Sinir Hücresi…………………………………………………………….…...5
2.3. Yapay Sinir Ağlarının Temel Elemanları………………………….………………..6
2.3.1. Girdiler……………………………………………………………………..….6
2.3.2. Ağırlıklar……………………………………………………………………...6
2.3.3. Toplam Fonksiyonu…………………………………………………………...6
2.3.4. Aktivasyon Fonksiyonu………………………………………………….…....8
2.3.5. Hücrenin Çıktısı……………………………………………………………...13
2.4. Yapay Sinir Ağlarının Avantajları ve Dezavantajları……………………………...14
2.4.1. Yapay Sinir Ağlarının Avantajları…………………………………………...14
2.4.2. . Yapay Sinir Ağlarının Dezavantajları……………………………………...16
2.5. Yapay Sinir Ağlarının Uygulama Alanları………………………………………...16
2.6. Yapay Sinir Ağlarının Katmanları……………………………………….………...18
v
2.6.1. Girdi Katmanı…………………………………………………………….….18
2.6.2. Gizli Katman………………………………………………………………....18
2.6.3. Çıktı Katmanı………………………………………………………………..18
2.7. Yapay Sinir Ağlarının Sınıflandırılması…………………………………………...19
2.7.1. İleri Beslemeli Yapay Sinir Ağı……………………………………………..19
2.7.2. Geri Beslemeli Yapay Sinir Ağı…………………………………………......20
2.8. Yapay Sinir Ağları Mimarileri…………………………………………………….21
2.8.1. Tek Katmanlı Yapay Sinir Ağı……………………………………………....21
2.8.2. Çok Katmanlı Yapay Sinir Ağı……………………………………………...22
2.8.3. Geri Beslemeli Yapay Sinir Ağı……………………………………………..22
2.8.4. Kafes Yapılı Yapay Sinir Ağı………………………………………………..23
2.9. Yapay Sinir Ağlarında Öğrenme…………………………………………………..24
2.9.1. Danışmanlı Öğrenme………………………………………………………...25
2.9.2. Danışmansız Öğrenme…………………………………………………….....26
2.9.3. Takviyeli Öğrenme…………………………………………………………..26
2.10.Yapay Sinir Ağlarında Öğrenme Kuralları………………………………………..27
2.10.1. Hebb Kuralı………………………………………………………………..27
2.10.2. Hopfield Kuralı…………………………………………………………….28
2.10.3. Delta Kuralı………………………………………………………………..28
2.10.4. Kohonen Kuralı……………………………………………………………28
2.10.5. Gradyan İniş Kuralı………………………………………………………..29
2.10.5.1. Geri Yayılım………………………………………………………29
2.10.5.2. Yakınsama Kriteri…………………………………………………30
III. BÖLÜM
TEMEL BİLEŞEN FAKTÖR ANALİZİ
3.1. Temel Bileşen Faktör Analizinin Aşamaları………………………………………31
3.1.1. Değişkenlerin Standart Hale Dönüştürülmesi….…………………………...31
3.1.2. Varyans-Kovaryans (Korelasyon) Matrisinin Hesaplanması………………32
3.1.3. Korelasyon Matrisine Ait Özdeğerlerin ve Özvektörlerin Hesaplanması…..32
3.1.4. Özdeğerler ve Özvektörler Kullanılarak Faktör Yükleri Matrisinin
Hesaplanması…………………………………………………………..…....33
vi
3.1.5. Temel Bileşenlerin Hesaplanması…………………………………………..33
3.1.6. Regresyon Yöntemi İle Faktör Skorları Matrisinin Hesaplanması…………34
3.1.6.1. Faktör Skorları Katsayı Matrisinin Hesaplanması………………….34
3.1.6.2. Faktör Skorları Matrisinin Hesaplanması…………………………...34
IV. BÖLÜM
UYGULAMA
4.1. Örnek ve değişkenlerin Seçimi…………………………………………………….35
4.2. Temel Bileşen Faktör Analizi (TBFA) Uygulaması………………………….……36
4.3.Yapay Sinir Ağı (YSA) Uygulaması………………………………………….……42
V. BÖLÜM
SONUÇ VE ÖNERİLER
5.1. Sonuç ve Öneriler......……………………...………………………………….…...48
KAYNAKÇA……………………………………………………………….…….……49
ÖZGEÇMİŞ………………………………………………………………….………..53
vii
KISALTMALAR LİSTESİ
YSA: Yapay Sinir Ağı
ADALINE: Adaptif Lineer Nöron (Adaptive Linear Neuron)
MADALINE: Çoklu Adaptif Lineer Nöron (Multiple Addaline)
TBFA: Temel Bileşen Faktör Analizi
İMKB: İstanbul Menkul Kıymetler Borsası
viii
TABLOLAR LİSTESİ
Sayfa
Tablo 1: Toplam Fonksiyon Örnekleri………………………………………...……......8
Tablo 2: Değişkenlere Ait Korelasyon Matrisi………………………………………...37
Tablo 3: Özdeğerler ve Toplam Varyansın Faktörler Tarafından Açıklanan Kısmı…..38
Tablo 4: Faktör Yükleri Matrisi……………………………………………...….……..39
Tablo 5: Faktör Skorları Katsayıları Matrisi………………………………...…….…..40
Tablo 6: Faktörler ve Faktör Yükleri……………………………………………….….41
Tablo 7: Nöronlar Arasındaki Bağlantı Ağırlıkları…………………………...…….…45
Tablo 8: Sınıflandırma Başarısı (imkbort)……………..……………………..…….….46
Tablo 9: Sınıflandırma Başarısı (dolarort)…………….…………...……………….….47
Tablo 10: Sınıflandırma Başarısı (altınort)……………………………..……………...47
ix
ŞEKİLLER LİSTESİ
Sayfa
Şekil 1: Biyolojik sinir Hücresi……………………………………………………….…4
Şekil 2: Yapay Sinir Hücresi………………………………………………………….…5
Şekil 3: Doğrusal Fonksiyon………………………………………………………….…9
Şekil 4: Basamak Fonksiyon…………………………………………………………...10
Şekil 5: Tek Kutuplamalı Basamak Fonksiyon………………………………………...11
Şekil 6: Çift Kutuplamalı Basamak Fonksiyon………………………………………...11
Şekil 7: Parçalı Doğrusal Fonksiyon…………………………………………………...12
Şekil 8: Sigmoid Fonksiyon…………………………………………………...…….…12
Şekil 9: Tanjant Hiperbolik Fonksiyon……………………………………...………....13
Şekil 10: Sinüs Fonksiyonu………………………………………………………….…13
Şekil 11: Yapay Sinir Ağlarındaki Katmanlar………………………...…………….…19
Şekil 12: İleri Beslemeli Yapay Sinir Ağı……………………………………………...20
Şekil 13: Geri Beslemeli Yapay Sinir Ağı……………………………………………..21
Şekil 14: Tek Katmanlı Yapay Sinir Ağı……………………………………………....22
Şekil 15: Çok Katmanlı Yapay Sinir Ağı……………………………………………....22
Şekil 16: Geri Beslemeli Yapay Sinir Ağı……………………………………………..23
Şekil 17: Kafes Yapılı Yapay Sinir Ağı…………………………………………….….23
Şekil 18: Danışmanlı Öğrenme Yapısı………………………………………………....25
Şekil 19: Danışmansız Öğrenme Yapısı…………...……………………………….….26
Şekil 20: Yakınsama Kriteri……………………...……………………………….……30
Şekil 21: Yapay Sinir Ağı Mimarisi…………….…………………………………..….44
1
I. BÖLÜM
GİRİŞ
Yapay Sinir Ağları (YSA), beynin fizyolojisinden yararlanılarak oluşturulan
bilgi işleme modelleridir. Literatürde 100’den fazla yapay sinir ağı modeli vardır. Bazı
bilim adamları, beynimizin güçlü düşünme, hatırlama ve problem çözme yeteneklerini
bilgisayara aktarmaya çalışmışlardır. Bazı araştırmacılar ise, beynin fonksiyonlarını
kısmen yerine getiren birçok model oluşturmaya çalışmışlardır.
YSA’ların öğrenme özelliği, araştırmacıların dikkatini çeken en önemli
özelliklerden birisidir. Çünkü herhangi bir olay hakkında girdi ve çıktılar arasındaki
ilişkiyi, doğrusal olsun veya olmasın, elde bulunan mevcut örneklerden öğrenerek daha
önce hiç görülmemiş olayları, önceki örneklerden çağrışım yaparak ilgili olaya
çözümler üretebilme özelliği YSA’lardaki zeki davranışın da temelini teşkil eder.
1943 yılında bir nörobiyolojist olan Warren McCulloch ve bir istatistikçi olan
Walter Pitts, “Sinir Aktivitesindeki Düşüncelere Ait Bir Mantıksal Hesap” başlıklı bir
makale ile ilk dijital bilgisayarlara ışık tutmuştur. John Von Neumann bu makaleyi,
“elektronik beyinler” için bir kopya olarak görmüştür. Yapay zeka alanındaki
araştırmacılar içerisinde istisnai bir yeri olan Marvin Minsky, bu makaleden aldığı
ilhamla makroskobik zeka fikrini ortaya atmış ve uzman sistemlerin doğmasına neden
olmuştur. Bronx Yüksek Bilim Okulu’ndan Frank Rosenblatt, gözün hesaplamaları ile
ilgilenmiştir. Bu bilim adamları, öğrenmenin ve zekanın herhangi bir özelliğinin
simülasyonunda bilgisayarların aktif olarak nasıl kullanılabileceğini, 1956 yılında
düzenlemiş oldukları ilk yapay zeka konferansında tartışmışlardır (Saraç, 2004, s.9).
1959’da, Stanford Üniversitesinden Bernard Widrow, basit nöron benzeri
elemanlara dayanan ve “adaline” (Adaptive Linear Neuron) olarak adlandırılan bir
adaptif lineer elemanı geliştirmiştir. Adaline ve iki tabakalı biçimi olan “madaline”
(Multiple Adaline); ses tanıma, karakter tanıma, hava tahmini ve adaptif kontrol gibi
çok çeşitli uygulamalar için kullanılmıştır. Daha sonraları adaline, ayrık bir çıkış yerine
sürekli bir çıkış üretmek için geliştirilmiştir. Widrow, telefon hatları üzerindeki ekoları
elimine etmeye yarayan adaptif filtreleri geliştirmede, adaptif lineer eleman
algoritmasını kullanmıştır. Bununla ilk defa YSA’lar gerçek bir probleme uygulanmıştır
(Kıraç, 2011, s.15).
Helsinki Teknik Üniversitesi’nden Teuvo Kohonen 1970’lerin ilk yıllarında
adaptif öğrenme ve birleşik hafızalar üzerine temel çalışmalar yapmış ve bu olduğu
çalışmaları ile danışmansız öğrenme metotlarının gelişmesine ışık tutmuştur.
2
Minsky ve Papert’in perseptron isimli kitaplarında, YSA’nın temel olarak ilgi
çekici konular olmadığını belirtmeleri birçok araştırmacının bu alanda çalışmaktan
vazgeçmelerine sebebiyet vermiştir. YSA konusunda çalışmaya devam eden Grossberg,
YSA modellerini yapılandırmak için nörolojik verinin kullanılması, algı ve hafıza için
YSA tabanlı mekanizmaların önerilmesi, belirgin eşitliklerle bütünleşen bir sinaptik
model için bir ilişkilendirici kural üzerinde çalışmıştır.
1982 yılında ilgi çeken bir başka gelişme, moleküler biyolojiden beyin
kuramcılığına geçiş yapan bir model Caltech fizikçisi Hopfield tarafından sunulmuştur.
Kendi adıyla anılan bir ağ yapısı mevcuttur ve birçok alana uygulanmıştır (Batar, 2005,
s.2).
1987 yılında yapılan ilk yapay sinir ağları sempozyumundan sonra YSA
uygulamaları yaygınlaşmıştır. Günümüzde, YSA’larla ilgili araştırmalar yapan çok
sayıda bilim adamı ve araştırma grupları vardır. Farklı bilim ve ilgi alanlarında çalışan
birçok araştırmacı, birçok yeni gelişmeleri sunmaya devam edeceklerdir.
1.1. Çalışmanın Amacı
Bu çalışmada çok değişkenli istatistiksel yöntem olan temel bileşenler faktör
analizi ile yapay sinir ağları modelinin öngörü gücü birleştirilerek İMKB ulusal 100
endeksi, dolar ve altının endeks getirilerinin ortalamanın altında mı yoksa üstünde mi
olacağı tahmin edilmeye çalışılmıştır.
1.2. Çalışmanın Önemi ve Yöntemi
YSA’lar ile ilgili literatürde borsa tahmini üzerine geleneksel yöntemlerle
gerçekleştirilmiş yurtiçinde ve yurtdışında birçok çalışma mevcuttur. YSA’ların
doğrusal olmayan işlemlerdeki başarısı YSA’ların ekonomi ve finans alanındaki
kullanımı yaygınlaşmaktadır. Buna rağmen YSA’ların kullanıldığı borsayı tahmin etme
çalışmaları henüz yeterli sayıda değildir. Geleneksel tahmin yöntemlerinde; verilerin
doğrusal olmamasından kaynaklanan bazı sorunlar vardır. YSA’lar geleneksel tahmin
yöntemlerinin bu sorunlarını büyük ölçüde telafi edebilirler. Bu çalışmada kullanılan
yöntem; üç temel yatırım aracı olan İMKB 100 endeksi, dolar ve altına ait değişkenler
kullanılarak TBFA yardımı ile daha az sayıda faktöre indirmek ve bu faktörleri Yapay
Sinir Ağı’na girdi olarak kullanılarak yarınki getirilerin ortalama getirinin altında mı
yoksa üstünde mi olacağını tahmin etme şeklindedir.
3
1.3. Çalışmanın Sınırlılıkları
Söz konusu çalışma; 02.01.1997-30.12.2011 tarihleri arasındaki İMKB Ulusal
100 endeksinin günlük getirilerini kullanması, belirlenen tarihler arasındaki günlük
dolar getirisini kullanması ve belirlenen tarihler arasındaki günlük altın getirisini
kullanması ile sınırlıdır.
4
II. BÖLÜM
YAPAY SİNİR AĞLARI
2.1. Biyolojik Sinir Hücresi
İnsanlardaki sinir sistemi sinir adı verilen hücrelerden meydana gelir. Sinirler
canlıların hayati faaliyetlerinin yürütüldüğü en küçük birimlerdir. Bir insanda yaklaşık
olarak tahmini 1010 adet bulunduğu kabul edilen sinirler sadece insan beyninde değil
merkezi sinir sistemi üzerinde tüm vücutta yayılmıştır. Beynin haberleşme sistemini
oluşturan sinirlerin görevleri sinyal alma, işlem yapma ve elektrokimyasal sinyallerin
sinir ağları içinde iletimini sağlamaktır (Şen, 2004, s.8).
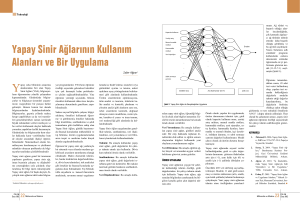
Şekil 1 Biyolojik Sinir Hücresi
Kaynak: Saraç, 2004, s.20
Şekil 1 de görüldüğü gibi sinir sistemi yapısal olarak 4 bölümden oluşmaktadır.
Bunlar; dentritler, soma, akson ve sinaps’tır. Temel olarak biyolojik sinir hücresi diğer
kaynaklardan girişleri alır, soma girişleri genelde doğrusal olmayan bir şekilde işler.
Akson işlenmiş girişleri çıkışa aktarır. Sinaps diğer sinirlere çıkışı gönderir (Elmas,
2003, s.30).
Yapay sinir ağları (YSA) yöntemi, teknoloji ve bilimsel çalışmalardaki
uygulamalarda biyolojik sinir sisteminin modellenmesi fikri ile ortaya çıkmıştır. Sinir
sisteminin modellenmesiyle YSA paralel çalışma ve öğrenebilme yetenekleri
bakımından biyolojik sinir sisteminin özelliğini göstermektedir.
5
2.2. Yapay Sinir Hücresi
Biyolojik sinir ağlarının sinir hücreleri olduğu gibi yapay sinir ağlarının da
yapay sinir hücreleri vardır. Yapay sinir hücreleri mühendislik biliminde işlem
elemanları olarak da adlandırılmaktadır (Öztemel, 2006, s.48).
Şekil 2 Yapay Sinir Hücresi
Kaynak: Kaynar, Taştan, Demirkoparan, 2010,s.562
Girdiler ( x1 , x2 ,K, xn ) , diğer hücrelerden ya da dış ortamlardan hücreye giren
bilgilerdir. Bunlar ağın öğrenmesi istenen örnekler tarafından belirlenir. Ağırlıklar
( w1, w2 ,K, wn ) ,
girdi kümesi veya kendinden önceki bir tabakadaki başka bir işlem
elemanının bu işlem elemanı üzerindeki etkisini gösteren değerlerdir. Her bir girdi, o
girdiyi işlem elemanına bağlayan ağırlık değeriyle çarpılarak, toplam fonksiyonu
aracılığıyla birleştirilir. Toplam fonksiyonu Denklem 1’de verildiği şekildedir (Kaynar,
Taştan ve Demirkoparan, 2010, s.562).
net=
1
Toplam fonksiyonunda elde edilen değer doğrusal ya da doğrusal olmayan
türevlenebilir bir transfer fonksiyonu ile işlem elemanının değeri aşağıdaki Denklem
2’de verildiği şekilde hesaplanır.
y = f (net) = f
2
Tüm yapay sinir ağları bu temel yapıdan üretilmiştir. Bu yapıdaki farklılıklar
yapay sinir ağlarının farklı sınıflandırılmalarını sağlar. Bir yapay sinirin öğrenme
6
yeteneği, seçilen öğrenme algoritması içerisinde ağırlıkların uygun bir şekilde
ayarlanmasına bağlıdır (Elmas, 2003, s.32).
2.3. Yapay Sinir Ağlarının Temel Elemanları
Biyolojik sinir ağlarının hücreleri olduğu gibi yapay sinir ağlarının da yapay
sinir hücreleri mevcuttur. Yapay sinir hücre elemanlarına işlem elemanı denilmektedir.
İşlem elemanları beş esas elemandan oluşmaktadır. Bunlar; girdiler, ağırlıklar, toplam
fonksiyonu, aktivasyon fonksiyonu ve hücre çıktısıdır.
2.3.1. Girdiler
Bir yapay sinir hücresi birçok bilgiyi dış dünyadan alır ve bu bilgileri işleme tabi
tutar. Gelen bilgiler o sinir hücresi için girdi durumundadır. Girdiler dış dünyadan
olduğu gibi kendinden ya da kendinden önceki bir katmandaki işlem elemanının da
çıkışı olabilir.
2.3.2. Ağırlıklar
Ağırlıklar (w1, w2, …, wi), yapay sinir tarafından alınan girdilerin önemini ve
hücre üzerindeki etkisini belirleyen uygun katsayılardır. Her bir girdi kendine ait bir
ağırlığa sahiptir. Ağırlıklar, her işlem elemanın her girdisi üzerinde etki yapmaktadır.
Yapay sinir ağlarında girdilerin nöronlar arasındaki iletimini sağlayan tüm bağlantıların
farklı ağırlık değerleri bulunmaktadır. Bir yapay sinir ağında ağırlıklar bağlantının önem
derecesini gösterir. Ağırlıkların büyük ya da küçük olması önemli veya önemsiz olması
olduğu anlamına gelmez. Bir ağırlığın değerinin sıfır olması o ağ için en önemli olay
olabilir. Eksi değerler önemsiz demek değildir. Artı ya da eksi olması etkisinin pozitif
veya negatif olduğunu gösterir.
2.3.3. Toplam Fonksiyonu
Toplam fonksiyonunda bir hücreye gelen net girdi hesaplanır. Bu hesaplama için
değişik fonksiyonlar kullanılmaktadır. Yaygın olarak ağırlıklı toplam kullanılmaktadır.
Burada gelen her girdi değeri ile o girdiye ait olan ağırlığın çarpılarak bu çarpımların
toplanmasıdır.
net=
3
7
Ancak bazı uygulamalarda aşağıdaki gibi eşik değeri olan b’ de bu toplama dahil
edilmiştir.
net=
ya da
net=
4
b eşik değeri girdilerden bağımsız olmasından dolayı bütün girdilerin sıfır
olması durumunda çıktı değerinin sıfır değil de eşik değerine eşit olduğu görülmektedir.
Böylece belirtilen şartlar altında çıktı değerinin sıfır olması zorunluluğu ortadan
kalkmaktadır. Eşik değerinin kullanımı, toplam fonksiyonuna +1 ya da -1 değerine
sahip sabit bir girdinin b ağırlığına sahip bir bağlantı ile eklendiği şeklinde ele alınır
(Efe ve Kaynak, 2000, s.7).
Burada x girdileri w ağırlıkları ve n ise bir hücreye gelen toplam girdi sayısını
göstermektedir. Yapay sinir ağlarında daima bu formülün kullanılması şart değildir.
Uygulanan yapay sinir ağı modellerinden bazıları kullanılacak toplama fonksiyonunu
belirleyebilmektedir. Literatürde yapılan araştırmalarda toplama fonksiyonu olarak
değişik
formüllerin
kullanıldığı
görülmektedir.
Tablo
1’de
değişik
toplam
fonksiyonlarına örnekler verilmektedir. Görüldüğü gibi, bazı durumlarda gelen
girdilerin değeri dikkate alınırken bazı durumlarda ise gelen girdilerin sayısı önemli
olabilmektedir. Bir problem için en uygun toplama fonksiyonunu belirlemek için
bulunmuş bir formül yoktur. Genellikle deneme yanılma yolu ile toplama fonksiyonu
belirlenmektedir. Bir yapay sinir ağında bulunan işlem elemanlarının tamamının aynı
toplama fonksiyonuna sahip olmaları gerekmez. Her işlem elemanı bağımsız olarak
farklı bir toplama fonksiyonuna sahip olabilecekleri gibi hepsi aynı işlem elemanına
sahip olabilir. Hatta ağın bazı işlem elemanları grup halinde aynı toplama fonksiyonuna
sahip olabilir. Diğerleri ise farklı fonksiyonlar kullanabilirler. Bu tamamen tasarımcının
kendi öngörüsüne dayanarak verdiği karara bağlıdır (Öztemel, 2006, s.49-50).
8
Tablo 1
Toplam Fonksiyon Örnekleri
Net giriş
Açıklama
Çarpım
Ağırlık değerleri girdiler ile çarpılır ve
Net Girdi =
daha sonra bulunan değerler birbirleri ile
çarpılarak net girdi hesaplanır.
Maksimum
N
adet
girdi
içinden
ağırlıklar
ile
Net Girdi =
çarpıldıktan sonra en büyüğü yapay sinir
hücresinin net girdisi olarak kabul edilir.
Minimum
N
adet
girdi
içinden
ağırlıklar
ile
Net Girdi =
çarpıldıktan sonra en küçüğü yapay sinir
hücresinin net girdisi olarak kabul edilir.
Çoğunluk
N
adet
girdi
içinden
ağırlıklar
ile
Net Girdi =
çarpıldıktan sonra pozitif ve negatif
olanların sayısı bulunur. Büyük olan sayı
hücrenin net girdisi olarak kabul edilir.
Kümülâtif toplam
Hücreye gelen bilgiler ağırlıklı olarak
Net Girdi =
toplanır ve daha önce gelen bilgilere
eklenerek hücrenin net girdisi bulunur.
Kaynak : Ercan Öztemel, Yapay Sinir Ağları, İstanbul: Papatya Yayıncılık, 2006, s.50
2.3.4. Aktivasyon Fonksiyonu
Bir girdi katmanı, bir çıktı katmanı ve bir veya daha fazla sayıda paralel gizli
katmanlardan oluşan yapay sinir hücresinin çıktı değerlerinin aralığının belirlenmesinde
kullanılan fonksiyonlara aktivasyon fonksiyonu denir (Boyacıoğlu ve Kara, 2007
s.211).
Aktivasyon fonksiyonu hücreye gelen net girdiyi işleyerek bu net girdiye
karşılık üreteceği çıktıyı belirler. Aktivasyon fonksiyonunda da toplam fonksiyonunda
olduğu gibi çıktıyı hesaplamak için farklı formüller kullanılmaktadır. Bazı modeller bu
fonksiyonun türevinin alınabilir bir fonksiyon olmasını şart koşmaktadır. Toplam
fonksiyonunda olduğu gibi aktivasyon fonksiyonunda da ağın işlem elemanlarının
hepsinin aynı fonksiyonu kullanması gerekmez. Bazı elemanlar aynı fonksiyonu diğer
9
elemanlar farklı fonksiyonu kullanabilir. Bir problem için en iyi fonksiyon tasarımcının
denemeleri sonucunda belirleyebileceği bir durumdur (Öztemel, 2006, s.50).
Aktivasyon fonksiyonu girdi ve çıktı elemanları arasındaki eğrisel eşleşmeyi
sağlar. Fonksiyonun doğru seçilmesi ağın performansı üzerinde önemli bir etkiye
sahiptir. Seçilen fonksiyon tek kutuplu, çift kutuplu yada doğrusal olabilir. Seçilen
fonksiyonun doğrusal olmaması durumunda, eğimin parametresi belirlenmelidir.
Eğimin parametresi de optimal sonuca yeterli derecede yaklaşılmasında rol oynayan
önemli bir faktördür (Erilli, Eğrioğlu, Yolcu, Aladağ ve Uslu, 2010, s.46).
Yapay sinir ağlarında doğrusal olmayan fonksiyonların kullanılması ile yapay
sinir ağlarının çok karmaşık ve farklı problemlere uygulanması sağlanmıştır. En çok
kullanılan aktivasyon fonksiyonları şunlardır (Öztemel, 2006, s.51; Elmas, 2003, s.3334; Saalasti, 2003, s.79; Krieger, 1996, s.6; Koleyni, 2009, s.145, Şen, 2004, s74-78).
Doğrusal Fonksiyon
Doğrusal fonksiyon hücreye gelen girdileri olduğu gibi hücrenin çıktısı olarak
kabul eder. Doğrusal fonksiyon Şekil 3’te gösterildiği gibidir. Çoğunlukla ADALİNE
olarak adlandırılan doğrusal modelde, regresyon analizinde ve klasik işaret işlemede
kullanılır. Denklemi ise;
v = net=
veya v = net=
y = F(v) = Av
olmak üzere
5
Formüldeki A sabit sayıdır.
Şekil 3 Doğrusal Fonksiyon.
10
Basamak Fonksiyonu
Basamak fonksiyonu tek veya çift kutuplu fonksiyon olabilir. Bu tip
fonksiyonların şekli Şekil 4’ te ve matematiksel ifadeleri de Denklem 6 ve 7’de
gösterildiği gibidir. Ayrıca Perceptron (Basit Algılayıcı Model) olarak bilinen yapay
sinir hücresinde aktivasyon fonksiyonu olarak bu fonksiyon kullanılır.
y = F(v) =
6
y = F(v) =
7
(a) Tek kutuplu
(b) Çift kutuplu
Şekil 4 Basamak Fonksiyonları.
Kutuplamalı Basamak Fonksiyonu
Kutuplama değeri, tek kutuplu çift kutuplu basamak fonksiyonlarının her ikisine
de eklenebilir. Gelen net girdi değerinin belirlenen bir eşik değeri olan b’ nin altında
veya üstünde olmasına göre hücrenin çıktısı 1 veya 0 değerini alır. Tek kutuplamalı
basamak fonksiyonunun şekli Şekil 5’ te ve matematiksel ifadesi Denklem 8’de
gösterildiği gibidir.
y = F(v) =
8
11
Şekil 5 Tek Kutuplamalı Basamak Fonksiyon.
Çift kutuplamalı basamak fonksiyonları için Şekil.6 ve Denklem 9 aşağıda
verilmiştir.
y = F(v) =
9
Şekil 6 Çift Kutuplamalı Basamak Fonksiyon.
Parçalı Doğrusal Fonksiyon
Parçalı doğrusal fonksiyon küçük aktivasyon potansiyeli için, α kazancı olan bir
doğrusal toplayıcı (ADALİNE) olarak çalışır. Büyük aktivasyon potansiyeli için, nöron
doyuma ulaşır ve çıkış işareti 1 olur. Büyük kazançlar için, α→∞ iken, parçalı doğrusal
fonksiyon basamak fonksiyon gibi davranır. Parçalı doğrusal fonksiyonun şekli Şekil
7’de ve matematiksel ifadesi Denklem 10’da gösterildiği gibidir.
y = F(v) =
10
12
Şekil 7 Parçalı doğrusal fonksiyon.
Sigmoid Fonksiyon
Yapay sinir ağlarında en çok kullanılan aktivasyon fonksiyonlarından biridir.
Tek kutuplu fonksiyon olarak da adlandırılır. Fonksiyonun en aktif bölgesi 0,2 ile 0,8
arasındadır. Sigmoid fonksiyonunun şekli Şekil 8’de ve matematiksel ifadesi Denklem
11’de gösterildiği gibidir.
y = F(v) =
=
11
Şekil 8 Sigmoid Fonksiyon
Tanjant Hiperbolik Fonksiyon
Bu fonksiyon yapay sinir ağlarında en çok kullanılan fonksiyonlardan bir
diğeridir. Çift kutuplu fonksiyon olarak da adlandırılır. Giriş uzayının genişletilmesinde
etkili bir şekilde kullanılan bir aktivasyon fonksiyonudur. Tanjant hiperbolik
fonksiyonun şekli Şekil 9’da ve matematiksel ifadesi Denklem 12’de gösterildiği
gibidir.
y = F(v) =
12
13
Şekil 9 Tanjant Hiperbolik Fonksiyon.
Sinüs Fonksiyon
Öğrenilmesi düşünülen olaylar sinüs fonksiyonuna uygun dağılım gösteriyorsa,
bu gibi durumlarda aktivasyon fonksiyonu olarak sinüs fonksiyonu kullanılır. Sinüs
fonksiyonunun şekli Şekil 10 ve matematiksel ifadesi Denklem 13 olarak aşağıda
gösterildiği gibidir.
y = F(v) =
13
Şekil 10 Sinüs Fonksiyonu.
2.3.5. Hücrenin Çıktısı
Aktivasyon fonksiyonu tarafından belirlenen değer çıktı değeridir. Üretilen çıktı
dış dünyaya ya da diğer bir hücreye gönderilir. Bu hücrenin çıktısı kendine ve
kendinden sonra gelen bir ya da daha fazla sayıda hücreye giriş olabilir. İşlem
elemanının sadece bir çıktı değeri vardır. Ağ şeklinde gösterilmesinden dolayı çıktı
elemanının birden fazla çıktı değeri olduğu sanılmaktadır. Bu sadece gösterim
amaçlıdır.
14
2.4. Yapay Sinir Ağlarının Avantajları ve Dezavantajları
Teknolojik gelişme olarak görülmesi gereken YSA’ lar özellikleri ve
yapabildikleri sayesinde önemli avantajlar sağlamaktadır. Bu avantajların yanı sıra bazı
dezavantajları da bulunmaktadır.
2.4.1. Yapay Sinir Ağlarının Avantajları
Doğrusal Olmama: Nöron temelde doğrusal olmayan bir yapıya sahiptir. Bir sinir ağı
ise nöronların karşılıklı olarak bağlanmasından oluştuğu için doğası itibariyle doğrusal
değildir. Ayrıca ağın her tarafına dağıtılmış olmasından ötürü özel bir çeşit doğrusal
olmama durumu söz konusudur. Özellikle girdi setinin yaratılmasından sorumlu altta
yatan fiziksel mekanizma doğası gereği doğrusal değilse bu durumda doğrusal olmama
özelliği büyük bir öneme sahip olmaktadır. Sinir ağı modellerinin özellikle parametrik
olmayan doğası, doğrusallık ve normallik varsayımının sağlandığından kuşku duyulan
sosyal bilim verilerine uygunluk sağlamaktadır (Aras, 2008, s,21).
Öğrenme: Geleneksel hesaplama yöntemlerinde bir problemin çözülebilmesi için
probleme uygun bir algoritma geliştirilmesi ve programlama yolu ile hesaplama
yapılması gerekmektedir. Genellikle bu tür algoritmaların çözüm yeteneği uzmanın kod
yazma yeteneği ile sınırlıdır. Bu tür algoritmaların zorluğu ve her problem türüne göre
farklı algoritma yazılma ihtiyacı nedeniyle karmaşık problemlerin çözümünde
kullanılamazlar. Herhangi bir nesneyi bilgisayara geleneksel yöntemlerle öğretmek için
nesnenin mümkün olan tüm açılardaki ve uzaklıklardaki görüntülerini, mümkün olan
tüm değişik kombinasyonları ile birlikte göstermeniz gerekmektedir. YSA’ların
öğrenme sistemi ise insan beyninin çalışma şekline benzemektedir. Öğrenme, özellikleri
verilen örnekler yoluyla yapay sinir ağının kendisi tarafından sağlanmakta ve YSA’lar,
örnekleri kullanarak probleme ilişkin genelleme yapabilecek yeteneğe ulaşmaktadır. Bu
özelliği sayesinde geleneksel yöntemler için karmaşık olan sorunlara çözüm
üretilebilmektedir. Ayrıca, insanların kolayca yapabildiği ancak geleneksel yöntemler
için imkansız olan basit işlemler için de uygun olmaktadırlar. Geleneksel sistemlerden
ayrıldığı bir başka nokta ise sürekli öğrenmedir. YSA’lar, kendisine gösterilen yeni
örnekleri öğrenebilmeleri ve yeni durumlara adapte olabilmeleri sayesinde sürekli
olarak yeni olayları öğrenebilmesi mümkündür (Bayır, 2006 s.8).
15
Hata Toleransı ve Esneklik: Yapay sinir ağları, geleneksel işlemcilerden farklı şekilde
işlem yapmaktadırlar. Geleneksel işlemcilerde tek bir merkezi işlemci eleman her
hareketi sırasıyla gerçekleştirmektedir. Seri bilgi işlem yapan geleneksel bir sistemde
herhangi bir birimin hatalı çalışması, hatta tamamen bozulmuş olması tüm sistemin
hatalı çalışmasına veya bozulmasına sebep olacaktır. YSA modelleri, her biri büyük bir
problemin bir parçası ile ilgilenen çok sayıda basit işlemci elemanlardan oluşmaları ve
bağlantı ağırlıklarının ayarlanabilmesi gibi özelliklerinden dolayı önemli derecede
esnek bir yapıya sahiptirler. Bu esnek yapı sayesinde ağın bir kısmının zarar görmesi
modelde sadece performans düşüklüğü yaratmakta, problemin çözümünde büyük bir
soruna yol açmamakta, modelin işlevini tamamen yitirmesi söz konusu olmamaktadır.
Bu nedenle, geleneksel yöntemlere göre hatayı tolere etme yetenekleri son derece
yüksektir. Ayrıca toplam işlem yükünü paylaşan işlemci elemanların birbirleri
arasındaki yoğun bağlantı yapısı sinirsel hesaplamanın temel güç kaynağıdır. Bu yerel
işlem yapısı sayesinde, yapay sinir ağları yöntemi en karmaşık problemlere bile
uygulanabilmekte ve tatminkar çözümler sağlayabilmektedir (Yurtoğlu, 2005, s.35).
Gerçeklenme Kolaylığı: Yapay sinir ağlarında basit işlemler gerçekleyen türden
hücrelerden oluşması ve bağlantıların düzgün olması, ağların gerçeklenmesi açısından
büyük kolaylıklar sağlamaktadır (Saraç, 2004, s.13).
Genelleme:
Yapay
sinir
ağları
önceki
deneyimlerden
öğrenebilir,
bir
kez
eğitildiklerinde yeni bir veri kümesine hemen cevap verebilir. Bir örnekten hareket
ederek diğer örnekleri açıklayabilir (Tolon, Güneri ve Tosunoğlu, 2008, s.252).
Sınırsız Sayıda Değişken ve Parametre Kullanma: YSA modelleri sınırsız sayıda
değişken ve parametre ile istatistik yöntemlerine göre daha iyi tahminler
yapabilmektedir. Bu sayede mükemmele yakın tahminler sayesinde genel çözümler
sağlanmaktadır.
Hafıza: Geleneksel hesaplama yöntemlerinde bilgi, veri tabanlarında veya program
kodlarının içinde saklanmaktadır. YSA ise bilgiyi nöronlar arasındaki bağlantılarda
saklayabilmektedir. Bu sayede dağılan bilgiyi ağın tamamının öğrendiği ve olayın
tamamını gösterebildiği bilinmektedir. Bu nedenle YSA dağıtılan bellekte bilgiyi
saklayabilmektedir.
16
2.4.2. Yapay Sinir Ağlarının Dezavantajları
YSA kullanımında dezavantaj sayılabilecek noktalar; basit olarak görülebilecek
modelleme yapılarına rağmen bazı konularda uygulamanın zor ve karmaşık olmaktadır.
Bazı durumlarda, bir yakınsama sağlamak bile imkânsız olabilmekte fakat bu durum da
uygulama yapılan alana bağlıdır ve genellikle çok karmaşık problemlerle karşılaşılır
(Yurtoğlu, 2005, s.37).
Doğru modelleme için genellikle deneme yanılma yönteminin kullanılması da
önemli bir dezavantaj olabilir. Çünkü kullanılan modelin doğruluğunu ve oluşturulan
çözümün optimum çözüm olup olmadığını test etmek zordur. Model doğru kurulmuş
olsa bile yapay sinir ağları optimum çözüm garantisini vermez, yalnızca kabul edilebilir
çözümler üretebilir (Öztemel, 2003, s.34).
YSA ’nın bilgisayar donanımına bağlı çalışmaları da bir dezavantajdır.
YSA’ların temel prensibi olan paralel işlemcilerle günümüz bilgisayarları ve teknolojisi
ile uyuşmayabilir. Günümüzdeki bilgisayarlar seri çalışabilmekte ve aynı zamanda tek
bilgiyi işleyebilmektedir. Paralel işlemcileri bilgisayarlarda yapmak ise zaman kaybına
yol açabilir.
2.5. Yapay SinirAğlarının Uygulama Alanları
YSA hem yapısal açıdan çeşitlilikleri hem de öğrenme algoritmalarının
çeşitliliği açısından karmaşık problemlerin çözümünde modelin kurulmasında oldukça
değişik olanaklar sunmaktadır. Teknolojik gelişmelerin büyük bir ivme kazandığı bu
dönemde gerek donanım teknolojilerinin gerekse yazılım geliştirme ortamlarının
tasarımcıya sunmuş olduğu olanaklar, kullanıcı istekleri doğrultusunda sistemlerin ve
yaklaşımların karmaşıklığındaki artışı da beraberinde getirmiştir. YSA ‘nın ileriye
dönük uygulamaları için bu kısımda karmaşık sistemlerin denetimleri, akıllı makineler,
borsa, para ve finans konularına değinilmektedir (Efe ve Kaynak, 2000, s.103).
Bu uygulamaların hepsini bu çalışmada göstermek imkansızdır. Bu nedenle belli
başlı uygulamalardan örneklerle bahsedilecektir. Bu uygulamalar aşağıdaki başlıklar
altında özetlenebilir (Saraç, 2004, s.11; Öztemel, 2003, s.205; Li, 1994, s:303 - 313).
Endüstriyel Uygulamalar: Yapay sinir ağları bir endüstriyel sektörde fırınların ürettiği
gaz miktarının tahmini, imalatta, ürün tasarımı, proses ve makinelerin bakımı ve
hataların teşhisi, görsel kalite kontrolü, kimyasal proseslerin dinamik modellenmesi,
otomobillerde otomatik rehber sisteminin geliştirilmesi, robotlarda görme sistemleri
17
kontrol edilmesi, cep telefonlarında ses ile çalışabilme, araba pistonlarının üretim
şartlarının belirlenmesi, elektronik yonga hata analizleri, optimizasyon çalışmaları,
müşteri tatmini ve pazar verilerinin değerlendirilmesi ve analiz edilmesi, kömür güç
istasyonları için çevrimiçi karbon akımı ölçülmesi, işlerin makinelere atanması ve
çizelgeleme.
Finansal Uygulamalar: Makro ekonomik tahminler, banka kredilerinin ve sigorta
poliçelerinin değerlendirilmesi, kredi kartı hilelerinin tespiti, kredi kartı kurumlarında
iflas tahminleri, emlak kredilerinin yönetilmesi, bond, hisse senedi ve döviz kuru
tahminleri, risk analizleri gibi örneklerde uygulama alanı bulmaktadır.
Askeri Alanlarda Uygulamaları: Silahların otomasyonunda ve hedef izlemede, radar
ve sonar sinyallerinin sınıflandırılması ile nesneleri/görüntüleri ayırma ve tanımada,
yeni sensör ve algılayıcı tasarımında, mayın dedektörlerinde, uçakların rotalarının
belirlenmesinde ve gürültü önleme gibi alanlarda kullanılmaktadır
Haberleşme Uygulamaları: Görüntü ve veri sıkıştırma, otomatik bilgi sunma
servisleri, iletişim kanallarındaki gereksiz yankılanmaların ve gürültülerin filtrelenmesi,
iletişim kanallarındaki trafik yoğunluğunun kontrol edilmesi ve anahtarlanması gibi
alanlarda.
Sağlık Uygulamaları: EEG ve ECG gibi tıbbi sinyallerin analizi, kanserli hücrelerin
analizi, protez tasarımı, transplantasyon zamanlarının optimizasyonu, kan hücreleri
reaksiyonları ve kan analizlerinin sınıflandırılması, kalp krizlerinin önceden tespiti,
örüntüleme cihazlarının ürettiği verilerden hastalıkların teşhisi ve hastanelerde
giderlerin optimizasyonu, solunum hastalıklarının teşhisi, hamile kadınların karnındaki
çocukların kalp atışlarının izlenmesi gibi konularda uygulanmaktadır.
Diğer Alanlarda Uygulamalar: Sigorta poliçelerinin değerlendirilmesi, petrol ve gaz
aramasının yapılması, karakter, el yazısı ve imza tanıma sistemleri, veri madenciliği,
uçak parçalarının hata teşhislerinin yapılması, hava alanlarında bomba dedektörleri ve
uyuşturucu koklayıcılar olarak sıralanabilir.
18
2.6. Yapay Sinir Ağlarındaki Katmanlar
Sinir ağları nöronların bağlantılarından oluşur. Katman ifadesi yapay sinir
ağlarındaki nöronların sırasını belirlemek için kullanılır (Yıldız ve Yezegel, 2010,
s.150). Yapay sinir ağlarında üç katman bulunmaktadır. Her katman bir önceki
katmandan girdi alır ve bir sonraki katmana çıktı gönderen nöronlara sahiptir (Balas,
Koç ve Tür 2010, s.426). Bu katmanlar girdi, gizli ve çıktı katmanlarıdır. Bu katmanları
aşağıdaki gibi açıklayabiliriz.
2.6.1. Girdi Katmanı
Girdi katmanı dış dünyadan gelen verilerin bulunduğu katmandır. Bu
katmanında dış dünyadan gelen girdi değerleri üzerinde herhangi bir işlem
uygulanmamaktadır. Bu katmandaki tüm girdi değerleri bir sonraki katman olan gizli
katmanın her birimine dağıtılır (Tağluk, Akın ve Sezgin, 2010, s.602).
2.6.2. Gizli Katman
Gizli katman girdi ve çıktı katmanları arasında bir köprüdür. Gizli katmanda
girdi katmanından gelen girdi değerleri işleme tabi tutulmaktadır (Eletter ve Yaseen,
2010, s.210). Girdi ve çıktı katmanı tek katmandan oluşurken gizli katman bir ya da
birden çok katmandan oluşabilir (Tağluk, Akın ve Sezgin, 2010, s.602). Problemin
yapısına göre gizli katmanların ve gizli katmanda bulunacak gizli hücrelerin sayısı
deneme yanılma yoluyla tasarımcı tarafından düzenlenir.
2.6.3. Çıktı Katmanı
Çıktı katmanı, gizli katmandan gelen bilgileri işleyerek dış dünyaya ileten
katmandır. Çıktı katmanındaki çıktı ağdaki tüm nöronların birleşik etkisinin sonucudur
(Dombaycı ve Gölcü, 2009, s.1159).
19
Şekil 11 Yapay Sinir Ağlarındaki Katmanlar
Kaynak: Kutlu, Badur, 2009, s.29
2.7. Yapay Sinir Ağlarının Sınıflandırılması
Yapay sinir ağları daha önce de bahsedildiği gibi genel olarak birbirleri ile
bağlantılı işlemci birimlerinden ya da diğer bir ifade ile nöronlardan oluşmaktadır. Bu
nöronlar arasındaki bağlantıların yapısı ağın yapısını da belirler. Bağlantıların nasıl
olacağı, öğrenme algoritması tarafından belirlenir. Yapay sinir ağlarını yapılarına göre
sınıflandırmak mümkündür. Bu bölümde yapay sinir ağlarının sınıflandırılması
açıklanmaya çalışılacaktır.
Yapay sinir ağı mimarileri, nöronlar arasındaki bağlantıların yönlerine veya ağ
içindeki işaretlerin akış yönlerine göre; ileri beslemeli ve geri beslemeli olmak üzere
ikiye ayrılmaktadır (Ataseven, 2007, s.29).
2.7.1. İleri Beslemeli Ağlar
İleri beslemeli yapay sinir ağlarında, hücreler katmanlar şeklinde düzenlenir ve
bir katmandaki hücrelerin çıktısı bir sonraki katmana ağırlıklar üzerinden girdi olarak
gönderilir. Girdi katmanı, dış ortamlardan aldığı bilgileri hiçbir değişikliğe uğratmadan
20
gizli katmandaki hücrelere iletir. Bilgi, gizli ve çıktı katmanında işlenerek ağın çıktısı
belirlenir (Çuhadar ve Kayacan, 2005, s.3).
Girdi ve çıktı katmanlarının arasında gizli katmanlar bulunur. Gizli katmandaki
nöron sayıları ele alınan problemin gereklerine göre belirlenir, ancak gizli katman veya
katmanlardaki nöron sayısının optimallik anlamında doğru sayısını veren herhangi bir
analitik yöntem şimdiye kadar geliştirilememiştir. Dolayısıyla gizli katman sayısındaki
ve bu katmanların nöron sayılarındaki belirsizlikleri aşabilmenin tek yolu, deneme
yanılma yöntemidir (Efe ve Kaynak, 2000, s.13).
İleri beslemeli yapay sinir ağlarında sinyaller sadece tek bir yönde, girdi
katmanından çıktı katmanına doğru yönelir. Bir katmandan elde edilen çıktı değeri aynı
katmandaki nöronları etkilemez. İleri beslemeli ağlarda nöronlar yalnızca bir sonraki
katmanda bulunan nöronlarla bağlantıya sahiptir. İleri beslemeli ağ modellerinde ağın
çıktısı tamamen ağa giren girdilere bağlıdır. İleri beslemeli ağlar herhangi bir
dinamiklik özelliği taşımazlar ve gösterdikleri özellik bakımından doğrusal ve doğrusal
olmayan kararlı problem alanlarında uygulanmaları mümkündür (Tolon ve Tosunoğlu,
2008, s.250; Güneri ve Apaydın, 2004, s.175).
Şekil 12 İleri Beslemeli Yapay Sinir Ağı
Kaynak: Yazıcı, 2007, s.84
2.7.2. Geri Beslemeli Ağlar
Geri beslemeli ağlarda da nöronlar ileri beslemeli ağlarda olduğu gibi
katmanlarda bulunur. Ancak katmanlar arası bağlantılar tek yönlü değil çift yönlüdür.
Bir geri beslemeli ağ, çıktı ve ara katman çıktılarının girdi birimlerine veya önceki ara
katmanlara geri beslendiği bir ağ yapısıdır. Böylece girdiler hem ileri yönde hem de geri
yönde aktarılmış olur (Kaya, Oktay ve Engin, 2005, s.95).
Geri beslemeli ağ yapısında en az bir tane geri besleme çevirimi bulunur. Geri
besleme, aynı katmandaki hücreler arasında olabileceği gibi farklı katmanlardaki
nöronlar arasında da olabilir (Asilkan ve Irmak, 2009, s.380).
21
Geri beslemeli ağlarda bir katman üzerinde yer alan nöronlar, kendisinden,
katmandaki
diğer
nöronlardan
veya
diğer
katmanlardaki
nöronlardan
da
beslenebilmektedir. Bu nedenle geri beslemeli ağlarda bir nöronun çıktısı, nöronun o
andaki girdiler ve ağırlık değerleriyle belirlenmesinin yanında bazı nöronların bir
önceki süredeki çıktı değerlerinden de etkilenir. Bu türlü ağlar çok güçlü ve karmaşıktır
(Güneri ve Apaydın, 2004, s.175).
Şekil 13 Geri Beslemeli Yapay Sinir Ağı
Kaynak: Yazıcı, 2007, s.85
2.8. Yapay Sinir Ağı Mimarileri
Yapay sinir ağlarında değişik ağ mimariler bulunmaktadır. Bu ağ mimarileri ağı
eğitmek için kullanılan algoritmaya bağlıdır. Yapay sinir ağları mimarilerine göre
aşağıdaki gibi ayrılmıştır.
2.8.1. Tek Katmanlı Yapay Sinir Ağı
Tek katmanlı yapay sinir ağı en basit ağ yapısıdır. Bir giriş katmanı ve bir çıkış
katmanı vardır. Bu tip bir ağda bilgi girdiden çıktıya doğru ilerler yani ağ ileri
beslemelidir. Tek katman olarak isimlendirilmesinin sebebi, girdi katmanının veri
üzerinde hiçbir işlem yapmadan veriyi çıktı katmanına iletmesidir (Yıldız, 2006, s.66).
Bu ağlarda süreç elemanlarının değerlerinin ve dolayısıyla ağın çıktısının sıfır
olmasını önleyen bir de eşik değeri vardır ve değer daima 1’dir. Ağın çıktısı
ağırlıklandırılmış girdi değerlerinin eşik değeri toplanması sonucu bulunur. Bu girdi ile
bir aktivasyon fonksiyonundan geçirilerek ağın çıktısı hesaplanır. Tek katmanlı ağlarda
çıktı fonksiyonu doğrusal bir fonksiyondur. Bu fonksiyon 1 veya -1 değerlerini
almaktadır. Eğer çıktı 1 ise birinci sınıfta -1 ise ikinci sınıfta kabul edilmektedir (Vural,
2007, s.17).
22
Şekil 14 Tek Katmanlı Yapay Sinir Ağı
Kaynak: Vural, 2007, s.17
2.8.2. Çok Katmanlı Yapay Sinir Ağı
Çok katmanlı yapay sinir ağlarının çalışma prensibi tek katmanlı ağlarla aynı
şekildedir. Farklı olarak çok katmanlı yapay sinir ağlarında girdi ve çıktı katmanları
arasında gizli katmanların bulunmasıdır. Gizli katmanların sayısı ve gizli katmandaki
hücre sayısı problemin yapısına göre belirlenmektedir (Güngör, 2007, s.30).
Şekil 15 Çok Katmanlı Yapay Sinir Ağı
Kaynak: Torun, 2007, s 58
2.8.3. Geri Beslemeli Yapay Sinir Ağı
Geri beslemeli yapay sinir ağlarında çıktı ve ara katman çıktıları, girdi
birimlerine veya kendinden önce gelen ara katmanlara geri beslenir ve bu şekilde
23
girişlerin hem ileri yönde hem de geri yönde aktarılması sağlanır (Kaya, Oktay ve
Engin, 2005, s.95).
Ağ gücü temsil etme kabiliyeti bakımından geri beslemeli ağ yapısı gerçek
dinamik bir yapıya sahiptir (Yıldırım, 2002, s.3).
Geri beslemeli yapay sinir ağlarında aktivasyon ve hata değeri sonsuza kadar
veya kararlı noktaya ulaşıncaya kadar yayılabilir. Aynı katmanlardaki elemanlar birbiri
ile bağlantılı olduğundan, gizli katmandaki bir eleman hem dışarıdan gelen hem de
kendi katmanındaki elemanlardan gelen verileri girdi olarak kabul edecektir. Yani geri
beslemeli bağlantılar fazladan girdiye yol açacaktır. Bu değerler ağın kendisi tarafından
hesaplanmaktadır (Bayır, 2006, s.64).
Şekil 16 Geri Beslemeli Yapay SinirAğı
Kaynak: Kaya, Oktay, Engin 2005 s.95
2.8.4. Kafes Yapılı Yapay Sinir Ağı
Kafes yapılı yapay sinir ağlarında kafesin yapısı bir veya birden fazla sinir
hücresinden oluşan dizilerden oluşmaktadır. Kafesin boyutu ise ağ grafiğinin bulunduğu
uzayda boyutların sayısı olarak ifade edilmektedir (Güngör, 2007, s.33).
Şekil 17 Kafes Yapılı Yapay Sinir Ağı
Kaynak: Güngör, 2007, s.33
24
2.9. Yapay Sinir Ağlarında Öğrenme
Yapay sinir ağlarının en ayırt edici özelliklerinden birisi de öğrenme yeteneğine
sahip olmasıdır. Öğrenme elde bulunan örnekler arasındaki yapının iyi bir davranış
göstermesini sağlayabilecek olan bağlantı ağırlıklarının hesaplanması olarak tanımlanır.
Yapay sinir ağları öğrenme esnasında elde ettiği bilgileri, sinir hücreleri arasındaki
bağlantı ağırlıkları olarak saklar. Bu ağırlık değerleri yapay sinir ağlarının verileri
başarılı bir şekilde işleyebilmesi için gerekli olan bilgileri içerir (Şen, 2004, s.90).
Yapay
sinir
ağları
gibi
öğrenme
yöntemleri
örneklerden
öğrenmeye
dayanmaktadır. Örneklerden öğrenmenin temel felsefesi bir olay hakkındaki
gerçekleşmiş örnekleri kullanarak olayın girdi ve çıktıları arasındaki ilişkileri öğrenmek
ve bu ilişkilere göre daha sonra oluşacak olan yeni örneklerin çıktılarını belirlemektir.
Burada bir olay ile ilgili örneklerin girdi ve çıktıları arasındaki ilişkinin olayın genelini
temsil edecek bilgiler içerdiği kabul edilmektedir. Değişik örneklerin olayı değişik
açılardan temsil ettiği varsayılmaktadır. Farklı örnekler kullanarak böylece olay değişik
açılardan öğrenilmektedir. Burada bilgisayara sadece örnekler gösterilmektedir.
Bunlardan başka herhangi bir ön bilgi verilmemektedir. Öğrenmeyi gerçekleştirecek
sistem aradaki ilişkiyi kendi algoritmasını kullanarak keşfetmektedir (Öztemel, 2006,
s.24-25).
Yapay sinir ağlarının öğrenmesi bir çocuğun öğrenmesi gibidir. Sıcak bir
nesneye dokunmaması gerektiğini deneyerek öğrenen çocuklar zamanla daha az sıcak
olan bir cisme dokunabilme cesaretini gösterirler ve sıcak süt dolu bardağı elleriyle
tutarlar. Yani çocuk sıcaklık bilgisini öğrenmiş olmaktadır. Yapay sinir ağları da benzer
olarak; mevcut örnek kümesi üzerinde girdi ile çıktı arasındaki bağıntının ağırlıkların
değiştirilmesiyle eğitilirler. Sunulan girdi kümesi için; transfer fonksiyonu tarafından
sağlanan değerlere cevap olarak bağlantı ağırlıklarının tamamının veya bir kısmının
istenen çıktı ile ağ çıktısı arasındaki farkın belirli bir değere düşünceye kadar
değiştirilmesidir. Günümüze kadar çeşitli öğrenme algoritmaları geliştirilmiştir. Bunlar
temel olarak danışmanlı öğrenme, danışmansız öğrenme ve takviyeli öğrenme olarak üç
ana gruba ayrılır (Civalek ve Ülker, 2004, s.3174).
25
2.9.1. Danışmanlı Öğrenme
Danışmanlı öğrenmede, yapay sinir ağı kullanılmadan önce eğitilmelidir. Eğitme
işlemi, sinir ağına girdi ve çıktı bilgileri sunmaktan oluşur. Bu bilgiler genellikle eğitme
kümesi olarak tanımlanır. Yani, her bir girdi kümesi için çıktı kümesi ağa gösterilir
(Elmas, 2006, s.25).
Şekil 18 Danışmanlı Öğrenme Yapısı
Kaynak: Sağıroğlu Ş., Beşdok E., Erler M. (2003); Mühendislikte Yapay Zeka
Uygulamaları I: Yapay Sinir Ağları, Kayseri: Ufuk Kitap Kırtasiye-Yayıncılık, s.81.
Şekil 18’de danışmanlı öğrenme yapısı gösterilmektedir. Bu öğrenme
yönteminde öğrenmeye dışarıdan müdahale eden bir öğretmen, danışman vardır.
Öğrenme danışmanın kontrolündedir. Danışman, eğitim kümesini ve hata değerini
belirleyerek eğitimin ne kadar devam edeceğine karar verir (Şen, 2004, s.98-99).
Danışmanlı öğrenmenin temel amacı, ağın beklenen çıkışı ile ürettiği çıkış
arasındaki hatayı en aza indirmektir. Bu ağlara eğitim sırasında hem girdiler hem de o
girdilere karşılık üretilmesi gereken çıktılar verilir. Ağın görevi her girdi için o girdiye
karşılık gelen çıktıyı üretmektir. Veriler, girdi katmanına uygulanır, ara katmanlarda
işlenir ve çıktı katmanından da çıktılar elde edilir. Kullanılan eğitme algoritmasına göre,
ağın çıktısı ile arzu edilen çıktı arasındaki hata tekrar geriye doğru yayılarak hata
minimuma düşünceye kadar ağın ağırlıkları değiştirilir (Kılağız ve Baran, 2009, s.31).
Bir danışmanlı öğrenme mimarisinde, yapay sinir ağı modelinin performansı,
bilinen bir sonuca karşı ölçülür (Papatla, Zahedi ve Zekic-Susac, 2002, s.440).
Denetimli öğrenme modelini kullanan ağlar; Perceptron ve ilişkili hafızalar,
takviyeli
öğrenme,
stokastik
öğrenme,
vektör
nicelik
öğrenmesi,
delta
ve
26
genelleştirilmiş delta kuralı, geri yayılma algoritması, bu grup öğrenmede kullanılan
etkin metotlardır (Civalek ve Ülker, 2004, s.3174).
2.9.2. Danışmansız Öğrenme
Bu öğrenme türünde sistemin öğrenmesine yardımcı olan herhangi bir danışman
yoktur. Sisteme sadece girdi değerleri gösterilir (Öztemel, 2006, s.25).
Danışmansız öğrenmede sistemin doğru çıktı hakkında bilgisi yoktur ve girdilere
göre kendi kendisini örnekler. Danışmansız olarak eğitilebilen ağlar, istenen ya da hedef
çıktı olmadan girdi bilgilerinin özelliklerine göre ağırlık değerlerini ayarlar. Uygun bir
çıktı üretilinceye kadar bağlantı ağırlıkları değiştirilir (Güngör ve Çuhadar, 2005, s.90).
Danışmansız öğrenmede çıktı vektörünün yerine benzer tip girdilerin kümesi
oluşturularak bazı matematiksel kural veya fonksiyonel ilişkilerle sınıflandırılmaya
çalışır (Vashisth ve Chandra, 2010 s.19).
Şekil 19’da danışmansız öğrenme yapısı gösterilmektedir. Bu metot görüntü
işleme, işaret işleme ve kontrol problemlerinde etkin olarak kullanılır. Kohonen’in
kendini düzenleyen uzaylar, ve adaptif rezonans teorisi (ART) danışmansız öğrenmeye
örnek olarak verilebilir (Civalek ve Ülker, 2004, s.3174).
Şekil 19 Danışmansız Öğrenme Yapısı
Kaynak: Sağıroğlu Ş., Beşdok E., Erler M. (2003); Mühendislikte Yapay Zeka
Uygulamaları I: Yapay Sinir Ağları, Kayseri: Ufuk Kitap Kırtasiye-Yayıncılık, s.81.
2.9.3. Takviyeli Öğrenme
Takviyeli öğrenmede girdi değerlerine karşılık gelecek uygun çıktıların elde
edilmesi sırasında ağırlıkların en uygun değerlerinin bulunmasında genetik algoritmalar
27
veya tabu en iyilime yöntemleri kullanılır. Böylece ağırlıklar optimize edilmektedir
(Civalek ve Ülker, 2004, s.3174).
2.10. Yapay Sinir Ağlarında Öğrenme Kuralları
Yapay siniri ağları ile ilgili literatürde çok sayıda öğrenme kuralı bulunmaktadır.
Öğrenme kuralları kullanılan yapay sinir ağlarının amacı ve ağın topolojisi ile doğrudan
ilişkilidir. Ağırlıkların değiştirilmesi bu kurallara göre yapılmaktadır.
Yapay sinir ağlarına verilen girdilere göre kendi topolojisine uygun olarak işlem
yaptıktan sonra çıktı üretir. Üretilen çıktı değeri hedeflenen değere yakın olması için
kullanılan öğrenme kuralı da önemli bir yer tutar.
Bu öğrenme kurallarının birçoğu temel olarak Hebb öğrenme kuralın temel
almaktadır.
Ayrıca
araştırmacılar
sürekli
olarak
yeni
öğrenme
kuralları
geliştirmektedirler. Bu öğrenme kurallarından yaygın olarak kullanılan öğrenme
kuralları şunlardır.
• Hebb Kuralı
• Hopfield Kuralı
• Delta Kuralı
• Kohonen Kuralı
• Gradyan İniş Kuralı
2.10.1. Hebb Kuralı
Donald Hebb tarafından biyolojik temele bağlı olarak geliştirilmiştir. Tanımı
“The Organization Behevair”
kitabında anlatılmıştır. Bu öğrenme kuralı basit bir
mantığa dayanmaktadır. Eğer nöron başka bir nörondan girdi alıyorsa ve her iki nöron
aktif ise aralarındaki ağırlık kuvvetlendirilir dolayısıyla aralarındaki ilişki güçlenir
(Saraç, 2004, s.58-59).
Başka bir ifadeyle bir yapay sinir hücresi aktif ise bağlı olduğu hücreyi aktif
yapmaya, pasif ise pasif yapmaya çalışmaktadır (Öztemel, 2006, s.26).
Hebb kuralı diğer tüm öğrenme algoritmalarının temeli sayılır. Günümüzde en
çok bilinen yapay sinir ağı öğrenme algoritması olan hata geri yayılım algoritmasının
temeli de bu kurala dayanmaktadır (Bayru, 2007, s.34).
28
2.10.2. Hopfield Kuralı
Bu kural John Hopfield tarafından geliştirilmiştir ve bu kural Hebb kuralına
benzemektedir. Eğer beklenilen çıktı ve girdilerin her ikisi aktif veya her ikisi pasif ise
öğrenme katsayısı tarafından bağlantı ağırlığı kuvvetlendirilir. Diğer durumlarda ise
zayıflatılır.
Ağırlıkların kuvvetlendirilmesi yada zayıflatılması sırasında kullanılan öğrenme
katsayısı sabit ve 0-1 arasında kullanıcı tarafından belirlenen sabit bir değerdir.
2.10.3. Delta Kuralı
Bu kural Widrow ve Hoff tarafından geliştirilmiş ve Hebb kuralının biraz daha
gelişmiş şeklidir.
Delta kuralında nöronun gerçek çıktısı ile istenilen çıktı değerleri arasındaki
farkı azaltmak için bağlantıların ağırlık değerleri sürekli olarak değiştirilir.
Delta kuralı ortalama karesel hatayı, bağlantı ağırlık değerlerinin değiştirilmesi
ile minimize etme prensibine dayanır. Bu sebeple de bu algoritmaya Widrow-Hoff
öğrenme kuralı veya en küçük kareler öğrenme kuralı (Least Mean Square, LMS) olarak
da bilinmektedir. Hata aynı anda bir katmandan bir önceki katmana geri yayılarak
azaltılır. Ağın hatalarının düşürülmesi işlemi, çıktı katmanından girdi katmanına
ulaşıncaya kadar devam eder (Saraç, 2004, s.59-60).
Delta kuralı kullanılırken dikkat edilmesi gereken en önemli etken, girdi
setindeki verilerin rastgele dağılmış olması gerekmektedir. Eğitim setinin düzgün sırada
olması veya yapısal olarak düzgün olması, istenilen doğruluğa ulaşmaya engel teşkil
etmekte ve ağın öğrenmesini zorlaştırmaktadır (Bayır, 2006, s.31).
2.10.4. Kohonen Kuralı
Bu kural Kohonen tarafından biyolojik sistemlerdeki öğrenmeden esinlenerek
geliştirilmiştir. Bu kuralda nöronlar ağırlıklarını değiştirmek için birbirleri ile yarışırlar.
En uygun çıktıyı üreten nöron kazanan nöron olur ve kendisine komşu olan diğer
nöronların ağırlıklarını değiştirir.
Kohonen kuralında bir beklenen değer dizisi olmasına gerek yoktur. Bu nedenle
de kendi kendine yani danışmansız öğrenme metodudur (Şen, s 98).
29
2.10.5. Gradyan İniş (Eğim İniş) Kuralı
Bu çalışmada YSA modelinin tahmin edilmesinde eğim inişi yöntemi
kullanılmıştır (Bölüm 4.3). Bu kural Delta kuralına benzemektedir. Bu kuralda hatanın
düzeltilmesi için transfer fonksiyonun türevi kullanılır. Bu kurala göre öğrenme
katsayısı bir sabitle çarpılarak ağırlık değiştirilir.
Bu
kural
yavaş
bir
yakınsama
sağlamasına
rağmen
yaygın
olarak
kullanılmaktadır (Yurtoğlu, 2005, s.101).
2.10.5.1. Geri Yayılım
Geri yayılım, ağırlıkların nasıl ayarlanması gerektiğine karar verir. Her ağırlık
diğer ağırlıklar ile hata tahminini paylaşır. Aynı zaman da küçük bir hata küçük bir
düzenlemeyi büyük bir hata da büyük bir düzenlemeyi gerektirir. Geri yayılım da
ağırlıkların ayarlanması için kullanılan formül şu şekildedir;
i tane gözlem tahmini W’nun bir fonksiyonudur. Dolayısı ile E hata tahmini
de W’nun bir fonksiyonudur. Bu bilgiler ışığında hata tahmini formülünü şu şekilde
ifade edebiliriz;
E(W)=∑
Eğim iniş metodu ile formülü şu şekilde yenileyebiliriz;
=
+ (
Burada,
,
= 0 ile 1 arasında öğretici parametre
sırasıyla eski ve yeni hata fonksiyonlarına ait gradyan (eğim)
vektörünü temsil etmektedir. Yöntem, her yinelemede eğim vektörü doğrultusunda
kadar adım atılmasını sağlar. Yineleme
ve
arasında fark kalmayıncaya
kadar devam eder. Sonuç olarak gelinen nokta hata fonksiyonuna ait bir yerel
minimumdur.
Bu formülün daha farklı varyasyonu da vardır, o da şu şekildedir;
=
+
(
)
+
(
),
Ağ yapısı, gizli katmana ve gizli katmanlardaki düğüm sayısına karar verir.
Öğretici parametre ve momentum rastgele ağırlıklar ile ağı eğitmeye başlar. İlk gözlem
30
ağa iletilir ve bu gözlem üzerinden hata tahmini yapılır. Daha sonra hata geri
gönderilerek ağırlıklar tekrardan ayarlanmaktadır. Bu şekilde tüm gözlemler ile aynı
uygulama yapılır ve yakınsama onayı alınarak eğitime son verilmektedir.
2.10.5.2. Yakınsama Kriteri
Toplam hata tahminindeki azalma küçük ve ağırlıklardaki değişiklik az ise, bu
bize ağ eğitiminin hatayı minimize ettiği noktada olduğunu göstermektedir.
Hata azalmaya devam ediyor ise bu bizim çok iyi bir eğitici veri aldığımızı
gösterir. Ancak bir noktadan sonra eğitime son verilmez ise ağ ezberlemeye başlar ve
genelleme gücünü kaybeder.
Bunu anlamı şudur; eğitici veri setinden bir X değeri ağa gönderildiği zaman ağ
şiddetle Y değerini tahmin eder ancak daha önce hiç görmediği bir X değeri gönderilir
ise tahmin etmesi zor olur.
Veri seti, eğitici veri ve test edici veri olmak üzere ikiye ayrılmaktadır. Eğitici
veri, modelin yapılandırılmasında kullanılır. Test edici veriler ise modelin daha önce
görmediği veriler üzerindeki performansı test etmektedir.
Şekil 20 Yakınsama Kriteri
Genel olarak eğitici veri üzerindeki hata azalarak devam eder ancak test
üzerindeki hata Şekil 20’de görüldüğü gibi bir noktaya kadar azalır ve o noktadan sonra
artarak devam eder.
31
III. BÖLÜM
TEMEL BİLEŞEN FAKTÖR ANALİZİ
Temel Bileşenler Faktör Analizi (TBFA) çok değişkenli istatistiksel bir yöntem
olup çok sayıda değişkeni daha az sayıda faktöre indirgemeyi amaçlar; nxm
boyutundaki değişken uzayını nxk boyutundaki faktör uzayına indirger (n=gözlem
sayısı, m=değişken sayısı ve k=faktör sayısı).
TBFA, birbiri ile yakın ilişki ve etkileşimleri gösteren değişken gruplarını
özetleyen anlamlı faktörleri belirler.
TBFA ile her bir gözlem için faktör skorları hesaplanabilir. Faktör skor değerleri
daha sonra regresyon diskriminant, logit, probit ve yapay sinir ağı modeli gibi
modellerde bağımsız (girdi) değişken olarak kullanılabilir.
TBFA ile saptanan ortak faktörler (bağımsız değişkenler) birbirleri ile
korelasyon göstermedikleri için bağımsız değişkenler arasında olası bir çoklu bağlantı
(multicollinearity) probleminden de kaçınılmış olunmaktadır.
Model seçiminde cimrilik ilkesine (pirincipal of parsimony) uygun olarak,
optimum sayıda “iyi tahmin edici” değişken (faktör) saptar.
TBFA’de değişkenler çok değişkenli normal dağılımdan gelmeli ve metrik
ölçekte olmalıdır (oran ya da aralık ölçeği). Nominal ölçek (cinsiyet, medeni durum
gibi) ya da ordinal ölçek (küçük, orta ve büyük ölçekli firmalar gibi) faktör analizi için
uygun değildir.
3.1. TBFA’nın Aşamaları:
3.1.1. Değişkenlerin Standart Hale Dönüştürülmesi:
Aşağıda n adet gözlem ve m adet değişkenden oluşan Gnxm matrisi verilmiş
olsun.
g11 g12 L g1m
g g
21
22
Gnxm =
M
O
gnm
gn1
32
_
TBFA analizinde, öncelikle değişkenler ( g ij ), ortalama sıfır ( g j = 0), standart
sapma bir ( s g j =1) olacak şekilde aşağıdaki eşitliğe göre standart değerlere
dönüştürülür.
_
z ij =
g ij − g
j
sg j
z11 z12 L z1m
z z
21
22
Znxm =
M
O
znm
zn1
3.1.2. Varyans-Kovaryans (Korelasyon) Matrisinin Hesaplanması:
Değişkenlerin standart değerlerini içeren ( Z nxm ) matrisine ait varyans-kovaryans
matrisi hesaplanır. Değişkenler standart değerlere dönüştürüldüğü için varyanskovaryans matrisi aynı zamanda aşağıdaki korelasyon matrisini ( Rnxm ) verir. Bu matris
köşegen elemanları 1’e eşit ve simetriktir.
1 r12 L r1m
r 1
21
Rmxm=
M
O
1
rn1
3.1.3. Korelasyon Matrisine Ait Özdeğerlerin ve Özvektörlerin Hesaplanması:
R e = λ e özdeğer eşitliğinden, korelasyon ( R mxm ) matrisine ait özdeğerler
( λ j ) ve özvektörler ( e j ) hesaplanır; m adet değişken için m adet özdeğer ve m adet
özvektör hesaplanabilir ( j =1,2,..,m).
Hesaplanan birinci özdeğer orijinal değişken grubuna ait toplam varyansı en çok
açıklayan birinci temel bileşene aittir. Hesaplanan ikinci özdeğer orijinal değişken
grubuna ait toplam varyansı ikinci sırada en çok açıklayan ikinci temel bileşene aittir.
Özdeğeri 1’den büyük olan k adet temel bileşen seçilir (k<m). Böylece hesaplanan
33
k’inci özdeğer orijinal değişken grubuna ait toplam varyansı k’inci sırada toplam
varyansı açıklayan k’inci temel bileşene aittir.
Orijinal değişkenler standart hale dönüştürüldüğü için her bir değişkenin
ortalaması 0 varyansı ise 1 olacaktır. Toplam m adet değişken olduğunda ise toplam
varyans m’e eşit olacaktır. Özdeğeri 1’den küçük olan faktörlerin seçilmemesinin
nedeni bu faktörlerin toplam varyansı açıklamada tek bir değişkenden daha az açıklayıcı
güce sahip olmasından dolayıdır.
3.1.4. Özdeğerler ve Özvektörler Kullanılarak Faktör Yükleri Matrisin
Hesaplanması:
Hesaplanan özdeğerler ve özvektörler kullanılarak faktör yükleri matrisi ( Lmxk )
hesaplanır. Burada, m= değişken sayısı, k= faktör (temel bileşen) sayısıdır.
l11 l12 L l1k
l l
21
22
Lmxk =
M
O
lmk
lm1
Burada, l ij = e ij
λ
j
dir.
3.1.5. Temel Bileşenlerin Hesaplanması:
Değişkenlerin standart değerlerini içeren matrisle faktör yükleri matrisi
çarpılarak değişkenler faktörlere dönüştürülür ve nxk boyutlu faktör matrisi ( Fnxk )
hesaplanır.
Fnxk = Z nxm Lmxk
z11 z12 L z1m l11 l12 L l1k f11 f12 L f1k
z z
f f
l21 l22
21
22
21
22
=
Fnxk =
M
M
O
O
O M
fnk
znm lm1
lmk fn1
zn1
Örneğin, birinci gözleme ait birinci faktör (birinci temel bileşen) aşağıdaki gibi
hesaplanır.
f11 = z11l11 + z12l21 + ... + z1mlm1
34
Yine birinci gözleme ait ikinci faktör (ikinci temel bileşen) aşağıdaki gibi
hesaplanacaktır.
f12 = z11l12 + z12 l 22 + ... + z1m l m 2
Hesaplanan temel bileşenler birbirinden bağımsızdır. Diğer bir değişle temel
bileşenler kendi aralarında anlamlı korelasyon göstermezler.
3.1.6. Regresyon Yöntemi İle Faktör Skorları Matrisinin Hesaplanması:
3.1.6.1. Faktör Skorları Katsayı Matrisinin ( Bmxk ) Hesaplanması:
Her bir standartlaştırılmış değişken vektörü ( Z j )
bağımlı değişken, faktör
matrisi ( Fnxk ) bağımsız değişken olacak şekilde m adet regresyon analizi
gerçekleştirilerek faktör skorları katsayı matrisi ( Bmxk ) hesaplanır.
'
B = (F F
) −1 F ' Z
3.1.6.2. Faktör Skorları Matrisinin ( S nxk ) Hesaplanması:
Standartlaştırılmış değişken matrisi ( Z nxm ) faktör skorları katsayı matrisi ( Bmxk )
ile çarpılarak faktör skorları matrisi ( S nxk ) hesaplanır.
S nxk = Z nxm Bmxk
z11 z12 L z1m b11 b12 L b1k s11 s12 L s1k
z z
s s
b
b
21
22
21
22
21
22
=
Snxk =
M
O
M
O
O M
znm bm1
bmk sn1
snk
zn1
Örneğin, birinci gözleme ait birinci faktör skoru aşağıdaki gibi hesaplanır.
s 11 = z 11 b 11 + z 12 b 21 + ... + z 1 m b m 1
Yine birinci gözleme ait ikinci faktör skoru aşağıdaki gibi hesaplanacaktır.
s 12 = z 11 b 12 + z 12 b 22 + ... + z 1 m b m 2
35
IV. BÖLÜM
UYGULAMA
Bu çalışmada üç temel yatırım aracı olan İMKB 100 endeksi, dolar ve altına ait
son beş günlük getiri değerleri dikkate alınarak (toplamda 15 değişken) bu yatırım
araçlarına ait yarınki getiri tahmin edilmeye çalışılmıştır. Öncelikle bu 15 değişken
kullanılarak TBFA gerçekleştirilmiş ve 8 adet faktör saptanmıştır. Bu faktörlere ait
skorlar YSA’da girdi olarak kullanılarak yarınki getirilerin ortalama getirinin altında mı
yoksa üstünde mi olacağı tahmin edilmeye çalışılmıştır.
4.1. Örnek ve Değişkenlerin Seçimi
Çalışmanın örnek setini 02.01.1997-30.12.21011 tarihleri arasındaki 2957 adet
İMKB 100 endeksi getirileri ve ayrıca Türkiye’de menkul kıymet piyasasında yatırım
yapan yatırımcıların dikkate aldığı iki önemli yatırım aracı olan dolar ve altına ait
günlük getiriler kullanılmıştır.
Bu verilerin tamamı Merkez Bankası Elektronik Veri Dağıtım veri tabanı
sisteminden alınmıştır. (www.tcmb.gov.tr).
Üç yatırım aracına ait getiriler (İMKB100 endeksi, dolar ve altın) aşağıdaki gibi
hesaplanmıştır;
Burada;
= Getiriyi,
= Bugünün kapanış fiyatı,
ise dünün kapanış
fiyatını temsil etmektedir.
Gnxm gözlem matrisi n=2957 adet gözlem ve m=15 adet değişkenden
oluşmaktadır. Burada birinci değişken İMKB endeksi bugünkü getirisi (imkbbugün),
ikinci değişken İMKB endeksi dünkü getirisi (imkbdün), üçüncü değişken İMKB
endeksi iki gün önceki getirisi (imkbiki), dördüncü değişken İMKB endeksi üç gün
önceki getirisi (imkbüç), beşinci değişken İMKB endeksi dört gün önceki getirisi
(imkbdört), altıncı değişken doların bugünkü getirisi (dolarbugün), yedinci değişken
doların dünkü getirisi (dolardün), sekizinci değişken doların iki gün önceki getirisi
(dolariki), dokuzuncu değişken doların üç gün önceki getirisi (dolarüç), onuncu
değişken doların dört gün önceki getirisi (dolardört), onbirinci değişken altının bugünkü
getirisi (altınbugün), onikinci değişken altının dünkü getirisi (altındün), onüçüncü
değişken altının iki gün önceki getirisi (altıniki), ondördüncü değişken altının üç gün
36
önceki getirisi (altınüç) ve onbeşinci değişken altının dört gün önceki getirisi (altındört)
olarak kodlanmıştır.
Çalışmada kullanılan veriler çok sayıda (2957) olduğu için tablo şeklinde
verilmemiştir.
4.2. Temel Bileşen Faktör Analizi (TBFA) Uygulaması
Bu çalışmada Temel Bileşenler Faktör Analizi (TBFA) uygulanmasındaki
birinci amaç, değişkenler arasındaki temel ilişki ve etkileşimleri saptamak olup anlamlı
faktörleri belirlemektir.
İkinci amaç, daha önce değinildiği gibi model seçiminde cimrilik ilkesine
(pirincipal of parsimony) uygun olarak, optimum sayıda “iyi tahmin edici” değişken
(faktör) saptamaktır.
TBFA’de üçüncü amaç, her değişken için faktör skorları hesaplamaktır. Bu
faktör skorları daha sonra gerçekleştirilen YSA modelinde girdi olarak kullanılmıştır.
TBFA ile saptanan ortak faktörler (bağımsız değişkenler) birbirleri ile korelasyon
göstermedikleri için bağımsız değişkenler arasında olası bir çoklu bağlantı
(multicollinearity) probleminden de kaçınılmış olunmaktadır.
Değişkenlerin Standart Hale Dönüştürülmesi:
( Gnxm ) matrisi n=2957 adet gözlem ve m=15 adet değişkenden oluşmaktadır.
Değişkenlerin standartlaştırılmış değerleri çok sayıda olduğu için tablo şeklinde
verilmemiştir.
Varyans-Kovaryans (Korelasyon) Matrisinin Hesaplanması:
Değişkenlere ait korelasyon matrisi Tablo 2’de hesaplanmıştır.
37
Tablo 2
Değişkenlere Ait Korelasyon Matrisi ( Rnxm )
İmkb
İmkb
İmkb İmkb İmkb dolar
bugün
dün
iki
imkbugün
1,000
,003
,026 -,030 ,010 ,079
-,010 ,032 ,020 -,021 -,122 ,029 -,015 ,037 -,032
imkbdün
,003
1,000
,003 ,026 -,030 -,015
,079 -,010 ,032 ,020 -,037 -,122 ,029 -,015 ,037
imkbiki
,026
,003
1,000 ,003 ,027 ,012
-,015 ,079 -,010 ,032 -,005 -,037 -,122 ,029 -,015
imkbüç
-,030
,026
,003 1,000 ,004 -,089
,012 -,015 ,079 -,010 -,011 -,005 -,037 -,122 ,029
imkbdört
,010
-,030
,027 ,004 1,000 ,005
-,088 ,012 -,015 ,078 -,036 -,011 -,005 -,038 -,123
dolarbugün ,079
-,015
,012 -,089 ,005 1,000
-,001 -,001 -,001 -,001 ,064
,151 ,045 -,009 ,052
dolardün
-,010
,079
-,015 ,012 -,088 -,001
1,000 -,001 -,001 -,001 ,035
,064 ,151 ,045 -,009
dolariki
,032
-,010
,079 -,015 ,012 -,001
-,001 1,000 -,001 -,001 ,115
,035 ,064 ,151 ,045
dolarüç
,020
,032
-,010 ,079 -,015 -,001
-,001 -,001 1,000 -,001 -,018 ,115 ,035 ,064 ,151
dolardört
-,021
,020
,032 -,010 ,078 -,001
-,001 -,001 -,001 1,000 -,019 -,018 ,115 ,035 ,064
altınbugün -,122
-,037
-,005 -,011 -,036 ,064
,035 ,115 -,018 -,019 1,000 -,100 ,037 -,020 ,020
altındün
,029
-,122
-,037 -,005 -,011 ,151
,064 ,035 ,115 -,018 -,100 1,000 -,101 ,037 -,020
altıniki
-,015
,029
-,122 -,037 -,005 ,045
,151 ,064 ,035 ,115 ,037
altınüç
,037
-,015
,029 -,122 -,038 -,009
,045 ,151 ,064 ,035 -,020 ,037 -,101 1,000 -,101
altındört
-,032
,037
-,015 ,029 -,123 ,052
-,009 ,045 ,151 ,064 ,020
üç
dört
dolar dolar dolar dolar altın
bugün dün
iki
üç
dört
altın
bugün dün
altın
altın
altın
iki
üç
dört
-,101 1,000 -,101 ,037
-,020 ,037 -,101 1,000
Korelasyon Matrisine Ait Özdeğerlerin ve Özvektörlerin Hesaplanması:
R e = λ e özdeğer eşitliğinden, Tablo 2’de verilen korelasyon ( R mxm )
matrisine ait özdeğerler ( λ j ) ve özvektörler ( e j ) hesaplanır; m=15 adet değişken için
15 adet özdeğer ve 15 adet özvektör hesaplanabilir ( j =1,2,..,m).
Orijinal değişkenler standart hale dönüştürüldüğü için her bir değişkenin
ortalaması 0 varyansı ise 1 olacaktır. Toplam m=15 adet değişken olduğunda ise toplam
varyans 15’e eşit olacaktır. Özdeğeri 1’den küçük olan faktörlerin seçilmemesinin
nedeni bu faktörlerin toplam varyansı açıklamada tek bir değişkenden daha az açıklayıcı
güce sahip olmasından dolayıdır.
38
Tablo 3
Özdeğerler ve Toplam Varyansın Faktörler Tarafından Açıklanan Kısmı
Faktörler
Özdeğerler
%Varyans
Kümilatif %
Özdeğerler
%Varyans
Kümilatif %
1
1,358
9,054
9,054
1,358
9,054
9,054
2
1,292
8,611
17,665
1,292
8,611
17,665
3
1,239
8,263
25,928
1,239
8,263
25,928
4
1,163
7,751
33,679
1,163
7,751
33,679
5
1,137
7,583
41,262
1,137
7,583
41,262
6
1,125
7,499
48,762
1,125
7,499
48,762
7
1,052
7,017
55,778
1,052
7,017
55,778
8
1,003
6,683
62,462
1,003
6,683
62,462
9
,973
6,484
68,946
10
,926
6,176
75,121
11
,851
5,671
80,793
12
,837
5,579
86,372
13
,763
5,085
91,457
14
,725
4,831
96,288
15
,557
3,712
100,000
Tablo 3’te görüldüğü gibi birinci faktör toplam varyansın %9,054’ünü, ikinci
faktör %8,611’ini, üçüncü faktör %8,263’ünü dördüncü faktör %7,751’ini, beşinci
faktör %7,583’ünü, altıncı faktör %7,499’nu, yedinci faktör %7,017’sini ve sekizinci
faktör %6,683’ünü açıklamaktadır. Tahmin edilen toplam 8 ortak temel faktör toplam
değişken varyansının %62,462’sini açıklamaktadır.
Özdeğerler ve Özvektörler Kullanılarak Faktör Yükleri Matrisin Hesaplanması:
Tablo 3’te hesaplanan özdeğerler kullanılarak, Tablo 4’te faktör yükleri matrisi
( Lmxk ) hesaplanmıştır. Burada, m=15 (değişken sayısı), k=faktör (temel bileşen)
sayısıdır.
39
Tablo 4
Faktör Yükleri Matrisi ( Lmxk )
1
2
3
4
5
6
7
8
altıniki
,552
,235
,222
-,422
,139
,072
,127
,076
altınüç
-,409
,314
,360
,232
,275
-,244
,209
-,303
altındört
,398
,342
-,283
,288
-,019
,323
-,278
-,248
altındün
-,399
,470
-,356
-,150
-,174
,000
,296
,152
dolarbugün
-,131
,446
-,014
-,354
-,265
,262
-,394
,210
dolarüç
,078
,424
-,416
,288
,205
,148
,230
-,099
dolariki
-,086
,354
,470
,351
,068
,183
,104
,205
imkbiki
-,255
-,074
,170
,389
,210
,222
-,291
,385
altınbugün
,268
,098
,450
,229
-,507
,146
,010
,146
imkbdün
,325
-,037
-,004
,106
,463
-,251
-,345
,110
dolardün
,274
,342
,124
-,152
,118
-,506
,193
,391
imkbdört
-,205
-,303
,096
-,275
,206
,476
,287
,237
dolardört
,179
,067
,155
-,184
,447
,460
,192
-,195
imkbugün
-,316
,170
-,115
-,210
,350
-,039
-,405
,199
imkbüç
,215
-,193
-,409
,321
,041
,052
,291
,507
Temel Bileşenlerin Hesaplanması:
Fnxk matrisinde gözlem sayısı çok sayıda olduğu için tablo şeklinde
verilmemiştir.
Regresyon Yöntemi İle Faktör Skorları Matrisinin Hesaplanması:
Faktör Skorları Katsayı Matrisinin Hesaplanması:
Tablo 5, TBFA ile hesaplanan faktör skor katsayıları matrisini vermektedir.
40
Tablo 5
Faktör Skor Katsayıları Matrisi ( Bmxk )
1
2
3
4
5
6
7
8
imkbugün
-,040
-,068
-,467
,016
,076
,337
-,023
,227
imkbdün
,115
-,467
-,281
-,030
,247
-,023
-,070
,152
imkbiki
-,024
-,125
-,049
-,074
-,085
,063
-,025
,657
imkbüç
,098
,189
,000
-,518
,182
-,375
-,033
,283
imkbdört
-,281
,190
-,053
-,198
-,102
-,048
,531
,172
dolarbugün
,029
,139
,018
-,116
,021
,688
-,018
,076
dolardün
-,103
,060
-,022
,001
,713
-,041
-,107
,016
dolariki
,073
,076
,291
,234
,145
,012
,118
,458
dolarüç
,525
,246
-,107
,037
,045
-,179
,088
,039
dolardört
,148
-,072
-,050
,118
-,037
-,027
,638
-,031
altınbugün
-,029
-,024
,638
-,043
,042
,114
-,088
,136
altındün
,073
,631
-,106
-,004
,120
,100
-,059
-,029
altıniki
,017
-,108
,116
-,057
,409
,158
,376
-,199
altınüç
,020
,084
-,053
,672
,047
-,197
,000
,083
altındört
,628
-,157
,085
-,058
-,167
,159
,000
-,024
Faktör Skorları Matrisinin Hesaplanması:
Hesaplanan faktör skorları matrisi ( S nxk ) çok sayıda gözlem içerdiği için tablo
şeklinde verilmemiştir.
Faktörlerin Yorumlanması:
TBFA ile hesaplanan sekiz adet faktörün yorumlanmasını daha basite
indirgemek amacıyla “varimax” faktör döndürülmesi (varimax factor rotation) işlemi
gerçekleştirilmiştir. Bu yöntem, herhangi bir faktör üzerinde ağırlığı (etkisi) fazla olan
değişkenlerin belirlenmesini sağlayarak faktörlerin yorumlanmasını kolaylaştırmaktadır.
Yöntem herhangi bir bilgi kaybına neden olmamaktadır.
41
Tablo 6
Faktörler ve Faktör Yükleri
1
altındört
,762
dolarüç
,645
2
altındün
,764
imkbdün
-,547
3
altınbugün
,762
imkbugün
-,547
4
altınüç
,797
imkbüç
-,593
5
dolardün
,818
altıniki
,513
dolarbugün
6
7
8
,789
dolardört
,724
imkbdört
,594
imkbiki
,731
dolariki
,526
Tablo 6’da varimax faktör döndürmesinden sonra hesaplanan değişkenlere ait
faktör yükleri verilmektedir. Burada, faktör yükü 0,50’nin üzerinde olan değişkenler
görülmektedir.
Tahmin edilen birinci faktör (1) altında, faktör yükü sırasına göre sırasıyla
altındört, dolarüç değişkenleri gruplanmıştır. altındört ve dolarüç değişkenlerine ait
faktör yükleri sırasıyla 0,752 ve 0,645’tir. Dolayısı ile birinci faktör çalışmamızda
dikkate aldığımız yatırım araçları getirilerindeki toplam değişimi birinci derecede
açıklamaktadır. Birinci faktör toplam değişken varyansının %9,054’ünü açıklamaktadır.
Tahmin edilen ikinci faktör (2) altında, faktör yükü sırasına göre altındün,
imkbdün değişkenleri gruplanmıştır. altındün ve imkbdün değişkenlerine ait faktör
yükleri sırasıyla 0,764 ve -0,547’dir. Ancak ikinci faktör ile bu faktör içinde yer alan
imkbdün değişkeni arasında negatif ilişki söz konusudur. İkinci faktör toplam değişken
varyansının %8,611’ini açıklamaktadır.
42
Tahmin edilen üçüncü faktör (3) altında, faktör yükü sırasına göre altınbugün,
imkbbugün değişkenlerinden oluşmaktadır. altınbugün ve imkbbugün değişkenlerine ait
faktör yükleri sırasıyla 0,762 ve -0,547’dir. Üçüncü faktör ile bu faktör içinde yer alan
imkbbugün değişkeni arasında negatif bir ilişki söz konusudur. Üçüncü faktör toplam
değişken varyansının %8,263’ünü açıklamaktadır.
Tahmin edilen dördüncü faktör (4) altında, faktör yükü sırasına göre altınüç,
imkbüç değişkenlerinden oluşmaktadır. altınüç ve imkbüç değişkenlerine ait faktör
yükleri sırasıyla 0,797 ve -0,593’tür. Dördüncü faktör ile bu faktör içinde yer alan
imkbüç değişkeni arasında negatif bir ilişki söz konusudur. Dördüncü faktör toplam
değişken varyansının %7,751’ini açıklamaktadır.
Tahmin edilen beşinci faktör (5) altında, faktör yükü sırasına göre dolardün,
altıniki değişkenlerinden oluşmaktadır. dolardün ve altıniki değişkenlerine ait faktör
yükleri sırasıyla 0,818 ve 0,513’tür. Beşinci faktör toplam değişken varyansının
%7,583’ünü açıklamaktadır.
Tahmin edilen altıncı faktör (6) altında, faktör yükü sırasına göre dolarbugün
değişkeninden oluşmaktadır. dolarbugün değişkenine ait faktör yükü 0,789’dur. Altıncı
faktör toplam değişken varyansının %7,499’unu açıklamaktadır.
Tahmin edilen yedinci faktör (7) altında, faktör yükü sırasına göre dolardört,
imkbdört değişkenlerinden oluşmaktadır. dolardört ve imkbdört değişkenlerine ait
faktör yükleri sırasıyla 0,724 ve 0,594’tür. Yedinci faktör toplam değişken varyansının
%7,017’sini açıklamaktadır.
Tahmin edilen sekizinci faktör (8) altında, faktör yükü sırasına göre imkbiki,
dolariki değişkenlerinden oluşmaktadır. imkbiki ve dolariki değişkenlerine ait faktör
yükleri sırasıyla 0,731 ve 0,526’dır. Sekizinci faktör toplam değişken varyansının
%6,683’ünü açıklamaktadır.
Bir sonraki bölümde İMKB Ulusal 100 endeksi, dolar ve altın ortalama getirisi
çıktı (bağımlı değişken), temel bileşen faktör analizinde elde edilen 8 faktör girdi
(bağımsız değişkenler) olarak kullanılarak yarınki getirinin genel ortalama getiririnin
altında mı yoksa üstünde mi olacağı tahmin edilmeye çalışılmıştır.
4.3. Yapay Sinir Ağı (YSA) Uygulaması
Bu çalışmada İMKB Ulusal 100 endeksi, dolar ve altının yarınki ortalama
getirisi çıktı (bağımlı değişken), temel bileşen faktör analizinde elde edilen FAC1_1,
FAC2_1, FAC3_1, FAC4_1, FAC5_1, FAC6_1, FAC7_1, FAC8_1 girdi (bağımsız
43
değişkenler) olarak kullanılarak yarınki getirinin genel ortalama getiririnin altında mı
yoksa üstünde mi olacağı tahmin edilmeye çalışılmıştır.
Analizde SPSS 16 programı kullanılmıştır. 02.01.1997 - 30.12.2011 tarihleri
arasında toplam 2957 veri kullanılmış olup bu verilerin %69,8’i (2065 tanesi) öğrenme
amaçlı, %30,2’si (892 tanesi) test amaçlı alınmıştır. Bu seçim tamamen tesadüfi
yöntemle yapılmıştır.
Şekil 21’de bağımsız değişkenlerin tahmini için kurulan yapay sinir ağında 3
katman yer almaktadır. Bu katmanlardan ilki girdi katmanı, son katman çıktı katmanı ve
aradaki katmanda gizli katmandır. Girdi katmanında 8 nöron bulunmaktadır. Bunlar
FAC1_1, FAC2_1, FAC3_1, FAC4_1, FAC5_1, FAC6_1, FAC7_1, FAC8_1’dir. Gizli
katmanda 7 nöron bulunmaktadır. Son katmanda yani çıktı katmanında 6 nöron
bulunmaktadır. Bunlar imkbort= 0, imkbort= 1, dolarort= 0, dolarort=1, altınort= 0,
altınort= 1 nöronlarıdır.
Getiri kategorisinde
getiriyi,
ise ortalama getiriyi göstermektedir. Ayrıca
imkbort= 0 ortalamanın altında ve imkbort= 1 ise ortalamanın üzerinde getiriyi
göstermektedir. Bu dolarort ve altınort değerleri içinde geçerlidir.
Şekil 21’deki yapay sinir ağı mimarisinde gizli katmandaki aktivasyon
fonksiyonu sigmoid ve çıktı katmanındaki aktivasyon fonksiyonu sigmoid olarak
belirlenmiştir.
Gizli katman ve gizli katmandaki düğüm sayısı belirli bir strateji olmadan
deneme yanılma yöntemi ile belirlenmiştir.
44
Şekil 21 Yapay Sinir Ağı Mimarisi
Tablo 7’de her bir nöron arasındaki bağlantıların ağırlıkları verilmiştir. Örneğin,
girdi katmanındaki FAC1_1 nöronu ile gizli katmanın 1. nöronu (H(1;1)) arasındaki
bağlantı ağırlık değerinin 0,621, girdi katmanındaki FAC2_1 nöronu ile gizli katmanın
2. nöronu (H(1;2)) arasındaki bağlantı ağırlık değerinin -0,206, girdi katmanındaki
FAC3_1 nöronu ile gizli katmanın 4. nöronu (H(1;4)) arasındaki bağlantı ağırlık
değerinin 1,276 olduğu görülmektedir. Ayrıca gizli katmanın 1. nöronu (H(1;1)) ile çıktı
katmanının imkbort= 0 nöronu arasındaki bağlantı ağırlık değerinin -0,142, gizli
45
katmanın 2. nöronu (H(1;2)) ile çıktı katmanının imkbort= 1 nöronu arasındaki bağlantı
ağırlık değerinin -0,359, gizli katmanın 3. nöronu (H(1;3)) ile çıktı katmanının dolarort=
1 nöronu arasındaki bağlantı ağırlık değerinin 0,049 ve gizli katmanın 5. Nöronu
(H(1,5)) ile çıktı katmanının altınort= 0 nöronu arasındaki bağlantı değerinin -0.775
olduğu görülmektedir.
Tablo 7
Nöronlar Arasındaki Bağlantı Ağırlıkları
Tahmin
Tahmin Edici
Gizli Katman
Çıktı Katmanı
H(1:1) H(1:2) H(1:3) H(1:4) H(1:5) H(1:6) H(1:7) imkbort=0 imkbort=1 dolarort=0 dolarort=1 altınort=0 altınort=1
(Bias)
Girdi
Katmanı
,261
-,144 -,194 -,029 -,696 -,786 -,362
FAC1_1 ,621
,040
-,079
,661
,517
FAC2_1 ,475
-,206 ,048
,474
-,909 -,072 ,179
FAC3_1 ,964
-,875 ,521 1,276 ,093 1,421 -,851
FAC4_1 -,528
,198
FAC5_1 ,180
-,183 ,365
-,346 -,400
,558
,548
,117
-,096
,512
-,895 -,782 -,847 ,509
FAC6_1 -,317 -,151 -,339 -,825 -,230 -,709 -,214
FAC7_1 -,305
,203
-,147 -,345
,058
-,426 ,213
FAC8_1 -,303
,424
-,122
-,086
,140
,586
,089
(Bias)
-,065
,416
,427
-,376
,265
-,225
H(1:1)
-,142
,167
-,164
,104
,071
-,309
H(1:2)
,108
-,359
-,188
-,073
,085
-,090
H(1:3)
-,657
,338
,049
-,149
-,093
,077
Katman H(1:4)
,202
-,103
-,432
,408
,334
-,296
H(1:5)
,424
-,379
,259
-,253
-,775
,547
H(1:6)
,335
-,552
-1,363
1,409
-,248
,340
H(1:7)
,031
-,282
,462
-,288
,083
,084
Gizli
Şekil 21 ve Tablo 7’de verilen YSA modelinin sonuçları imkbort için Tablo 8’de
verilmektedir. Model günlük yatırım stratejisi izleyen yatırımcılara önemli bilgiler
vermektedir. Tablo 8’de görüldüğü gibi YSA modeli eğitim sürecinde ortalama üstü
getiriyi %54,0 oranında doğru tahmin etmektedir. Ayrıca Tablo 8’de modeli test eden
46
test örneği sonucunda görüldüğü gibi ortalama üstü getiriyi %51,2 oranında doğru
tahmin etmektedir. Buradan şu sonuç çıkmaktadır. Yatırımcı FAC1_1, FAC2_1,
FAC3_1, FAC4_1, FAC5_1, FAC6_1, FAC7_1, FAC8_1 değişkenlerini modelde girdi
olarak kullandığında yarınki getiriyi ortalamanın üzerinde (imkbort= 1) tahmin
ediyorsa, yatırımcının ortalamanın üstü getiri elde etme olasılığı %51,2’dir. Yarınki
getiriyi ortalamanın altında (imkbort= 0) tahmin ediyorsa, yatırımcının ortalamanın altı
getiri elde etme olasılığı %57,9’dur.
Tablo 8
Sınıflandırma Başarısı (imkbort)
Tahmin
Örnek
Gözlem
Eğitim
0
520
517
50,1%
1
473
555
54,0%
48,1%
51,9%
52,1%
0
265
193
57,9%
1
212
222
51,2%
53,5%
46,5%
54,6%
Toplam Yüzde
Test
Toplam Yüzde
0
1
Doğruluk Yüzdesi
Şekil 21 ve Tablo 7’de verilen YSA modelinin sonuçları dolarort için Tablo 9’da
verilmektedir. Tablo 9’da görüldüğü gibi YSA modeli eğitim sürecinde ortalama üstü
getiriyi %61,6 oranında doğru tahmin etmektedir. Ayrıca Tablo 9’da modeli test eden
test örneği sonucunda görüldüğü gibi ortalama üstü getiriyi %65,4 oranında doğru
tahmin etmektedir. Buradan şu sonuç çıkmaktadır. Yatırımcı FAC1_1, FAC2_1,
FAC3_1, FAC4_1, FAC5_1, FAC6_1, FAC7_1, FAC8_1 değişkenlerini modelde girdi
olarak kullandığında yarınki getiriyi ortalamanın üzerinde (dolarort= 1) tahmin
ediyorsa, yatırımcının ortalamanın üstü getiri elde etme olasılığı %61,6’dır. Yarınki
getiriyi ortalamanın altında (dolarort= 0) tahmin ediyorsa, yatırımcının ortalamanın altı
getiri elde etme olasılığı %53,1’dir.
47
Tablo 9
Sınıflandırma Başarısı (dolarort)
Tahmin
Örnek
Gözlem
0
Eğitim
0
575
445
56,4%
1
401
644
61,6%
47,3%
52,7%
59,0%
0
217
192
53,1%
1
167
316
65,4%
43,0%
57,0%
59,8%
Toplam Yüzde
Test
Toplam Yüzde
1
Doğruluk Yüzdesi
Şekil 21 ve Tablo 7’de verilen YSA modelinin sonuçları altınort için Tablo
10’da verilmektedir. Tablo 10’da görüldüğü gibi YSA modeli eğitim sürecinde ortalama
üstü getiriyi %19,0 oranında doğru tahmin etmektedir. Ayrıca Tablo 10’da modeli test
eden test örneği sonucunda görüldüğü gibi ortalama üstü getiriyi %20,1 oranında doğru
tahmin etmektedir. Buradan şu sonuç çıkmaktadır. Yatırımcı FAC1_1, FAC2_1,
FAC3_1, FAC4_1, FAC5_1, FAC6_1, FAC7_1, FAC8_1 değişkenlerini modelde girdi
olarak kullandığında yarınki altın getirisini 1 olarak (ortalamanın üstü getiri) tahmin
ederse bu tahmin güvenilir olmayacaktır. Ancak 0 olarak tahmin ederse (ortalamanın
altı getiri) bu tahmin oldukça güvenilir olacaktır (%80,7).
Tablo 10
Sınıflandırma Başarısı (altınort)
Tahmin
Örnek
Gözlem
Eğitim
0
972
168
85,3%
1
749
176
19,0%
83,3%
16,7%
55,6%
0
367
88
80,7%
1
349
88
20,1%
80,3%
19,7%
51,0%
Toplam Yüzde
Test
Toplam Yüzde
0
1
Doğruluk Yüzdesi
48
V. BÖLÜM
SONUÇ VE ÖNERİLER
5.1. Sonuç ve Öneriler
Genel olarak sonuçlara baktığımıza tahmin edilen YSA modeli İMKB’ye ait
getirinin ortalama getirinin üzerinde olacağını (imkbort=1) %51,2 oranında ve yarınki
İMKB’ye ait getirinin ortalama getirinin altında olacağını (imkbort=0) %57,9 oranında
tahmin etmiştir. Ayrıca yarınki dolar getirisinin, ortalama getirinin üzerinde olacağını
(dolarort=1) %65,4 oranında ve yarınki dolar getirisinin, ortalama getirinin altında
olacağını (dolar=0) %53,1 oranında tahmin etmiştir. Bunlara ek olarak yarınki altın
getirisinin, ortalama getirinin üzerinde olacağını (altınort=1) %20,1 oranında ve yarınki
altın getirisinin, ortalama getirinin altında olacağını (altınort=0) %80,7 oranında tahmin
etmiştir.
Bu çalışmanın sonuçları özellikle İMKB 100 endeks getirisi için zayıf formda
piyasa etkinliği hipotezini (weak form market efficiency hypothesis) desteklemektedir.
Bilindiği gibi bu hipotez geçmiş tarihsel veriler kullanılarak hisse sende getirilerinin
tahmin edilemeyeceğini öngörür. Ancak dolar piyasası için bu hipotezin geçerli olduğu
söylenemez. Benzer biçimde altın piyasası dikkate alındığında özellikle modelin
ortalamanın altındaki getiriyi tahmin gücü oldukça yüksektir.
Sonuç olarak yapay sinir ağları, istatistikî yöntemlerden farklı olarak, verinin
özellikleri ile ilgili sağlanması gereken istatistikî varsayımlarda bulunmadığı gibi
algoritma veya matematiksel model geliştirmeye de gerek duymaz. Veri içindeki ilişki
kalıplarını ve desenleri tanıyarak öğrenir. Bu nedenle modelin kurulumu ve kullanımı
açısından basit, açık ve esnektir. Günümüzde, bu özellikleri ile yapay sinir ağları,
tahmin yöntemi olarak pek çok alanda kullanılmakta ve diğer yöntemlere tercih
edilmektedir. Problemin yapısına uygun olarak kurulmuş ve eğitilmiş bir yapay sinir
ağı, günümüzde kullanılan birçok tahmin metodundan çok daha iyi sonuçlar verecektir.
Bu çalışmada kullanılan yöntemin tek tek hisse senetleri bazında uygulanması
durumunda daha iyi sonuçlar alınabileceği düşünülmektedir.
49
KAYNAKÇA
Aras, S. (2008). Yapay sinir ağlarına duyarlılık analizleri. Yüksek Lisans Tezi, Dokuz
Eylül Üniversitesi Sosyal Bilimler Enstitüsü, 143s.
Asilkan, Ö., Irmak, S. (2009). İkinci el otomobillerin gelecekteki fiyatlaarının yapay
sinir ağları ile tahmin edilmesi. Süleyman Demirel Üniversitesi İktisadi ve İdari
Bilimler Fakültesi Dergisi, C 14, S 2, 375-391.
Ataseven, B. (2007). Satış öngörü modellemesi tekniği olarak yapay sinir ağlarının
kullanımı: “Petkim’de uygulanması”. Yüksek Lisan Tezi, Celal Bayar
Üniversitesi Sosyal Bilimler Enstitüsü, 118s.
Balas, C. E., Koç, M. L. ve Tür, R. (2010). Artificial neural networks based on principal
component analysis, fuzzy systems and fuzzy neural networks for preliminary
design of rubble mound breakwaters. Applied Ocean Research, 32, 425–433.
Batar, H. (2005). EEG işaretlerinin dalgacık analizi yöntemleri kullanarak yapay sinir
ağları ile sınıflandırılması. Yüksek Lisans Tezi, Kahramanmaraş Sütçü İmam
Üniversitesi Fen Bilimleri Enstitüsü, 89s.
Bayır, F. (2006). Yapay sinir ağları ve tahmin modellemesi üzerine bir uygulama.
Yüksek Lisan Tezi, İstanbul Üniversitesi Sosyal Bilimler Enstitüsü, 119s.
Bayru, P. (2007). Elektronik basında tüketici tercihleri analizi: Yapay sinir ağları ile
lojit modelin performans değerlendirmesi. Doktora Tezi, İstanbul Üniversitesi
Sosyal Bilimler Enstitüsü, 210s.
Boyacıoğlu, M., Kara, Y. (2007). Türk bankacılık sektöründe finansal güç derecelerinin
tahmininde yapay sinir ağları ve çok değişkenli istatistiksel analiz tekniklerinin
performanslarının karşılaştırılması. Dokuz Eylül Üniversitesi İktisadi ve İdari
Bilimler Fakültesi Dergisi, C.22, S.2, 197-217.
Civalek, Ö., Ülker, M. (2004). Dikdörtgen plakaların doğrusal olmayan analizinde
yapay sinir ağı yaklaşımı. İnşaat Mühendisleri Odası (İMO) Teknik Dergi, 31713190.
Çuhadar, M., Kayacan, C. (2005). Yapay sinir ağları kullanılarak konaklama
işletmelerinde doluluk oranı tahmini: Türkiye’deki konaklama işletmeleri üzerine
bir deneme. Anatolia: Turizm Araştırmaları Dergisi, Cilt 16, Sayı 1, 1-7.
Dombaycı, Ö. A., Gölcü, M. (2009). Daily means ambient temperature prediction using
artificial neural network method: A case study of Turkey. Renewable Energy, 34,
1158–1161.
50
Efe, Ö., Kaynak, O. (2006). Yapay Sinir Ağları ve Uygulamaları. İstanbul: Boğaziçi
Üniversitesi Yayıları.
Eletter, S. F., Yaseen, S. G. (January 2010). Applying neural networks for loan
decisions in the Jordanian Commercial Banking System. International Journal of
Computer Science and Network Security, Vol 10, No 1.
Elmas, Ç. (2003). Yapay Sinir Ağları Kuram Mimari Uygulama. İstanbul: Seçkin
Yayıncılık.
Erilli, N. A., Eğrioğlu, E., Yolcu, U., Aladağ, Ç. H. ve Uslu, V. R. (2010). Türkiye’de
enflasyonun ileri ve geri yapay sinir ağlarının melez yaklaşımı ile öngörüsü.
Doğuş Üniversitesi Dergisi, 11(1), 42-55.
Güneri, N., Apaydın, A. (2004). Öğrenci başarılarının sınıflandırılmasıda lojistik
regresyon analizi ile sinir ağları yaklaşımı. Gazi Üniversitesi Ticaret ve Turizm
Eğitim Fakültesi Dergisi, 1, 170-188.
Güngör, E. (2007). Yapay sinir ağları yardımı ile makine arızalarının önceden tahmin
edilmesi. Yüksek Lisans Tezi, Kocaeli Üniversitesi Sosyal Bilimler Enstitüsü,
74s.
Güngör, İ., Çuhadar, M. (2005). Antalya iline yönelik Alman turist talebinin yapay sinir
ağları yöntemiyle tahmini. Gazi Üniversitesi Ticaret ve Turizm Eğitim Fakültesi
Dergisi, 1, 84-98.
Kaya, İ., Oktay, S. ve Engin, O. (2005). Kalite kontrol problemlerinin çözümünde
yapay sinir ağlarının kullanımı. Erciyes Üniversitesi Fen Bilimleri Enstitüsü
Dergisi, 21, (1-2), 92-107.
Kaynar, O., Taştan, S. ve Demirkoparan, F. (2010). Ham petrol fiyatlarının yapay sinir
ağları ile tahmini. Ege Akademik Bakış, 10(2), 559-573.
Kılağız, Y., Baran, A. (2009). Bilgi edinme hakkı yasası çerçevesinde yapılan
elektronik başvuruların yapay sinir ağları ile sınıflandırılması. Atatürk
Üniversitesi İktisadi ve İdari Bilimler Dergisi, Cilt 23, Sayı 4, 27-41.
Kıraç, N. (2011). Türkiye’de faaliyet gösteren ticari bankaların finansal risklerinin
yapay sinir ağları yaklaşımı ile belirlenmesi. Yüksek Lisans Tezi, Çukurova
Üniversitesi Sosyal Bilimler Enstitüsü, 40s.
Koleyni, K. (2009). Using artfical neural Networks for income convergence. Global
Journal of Business Research, Volume 3, Number 2.
Krieger, C. (1996). Neural Networks in Data Mining.
51
Kutlu, B., Badur, B. (Haziran 2009). Yapay sinir ağları ile borsa endeksi tahmini.
İstanbul Üniversitesi İşletme İktisadi Enstitüsü Dergisi-Yönetim, Yıl 20, Sayı 63,
25-40.
Li, E. Y. (1994). Artifical neural Networks and their business aplications. Information
& Management, 27, 303-313.
Öztemel, E. (2006). Yapay Sinir Ağları. İstanbul: Papatya Yayıncılık.
Papatla, P., Zahedi, M. F. ve Zekic-Susac, M. (2002). Leveraging the strengths of
choice models and neural networks: A multiproduct comparative analysis.
Decision Sciences, Volume 33, Number 3, 433-468.
Saalasti, S. (2003). Neural Networks for Heart Rate Time Series Analysis. Jyväskylä:
University of Jyväskylä.
Sağıroğlu, Ş., Beşdok, E., Erler, M. (2003). Mühendislikte Yapay Zeka Uygulamaları.
Kayseri: Ufuk Kitap
Saraç, T. (2004). Yapay sinir ağları. Seminer Projesi, Gazi Üniversitesi Endüstri
Mühendisliği Bölümü Ana Bilim Dalı, 71s.
Şen, Z. (2004). Yapay Sinir Ağları İlkeleri. İstanbul: Su Vakfı.
Tağluk, M. E., Akın, M. ve Sezgin, N. (2010). Classıfıcation of sleep apnea by using
wavelet transform and artificial neural networks. Expert Systems with
Applications, 37, 1600–1607.
Tolon, M., Tosunoğlu, N. (2008). Tüketici tatmini verilerinin analizi: Yapay sinir ağları
ve regresyon analizi karşılaştırılması. Gazi Üniversitesi İktisadi İdari Bilimler
Fakültesi Dergisi, 10/2, 247-259.
Torun, T. (2007). Finansal başarısızlık tahmininde geleneksel istatistiki yöntemlerle
yapay sinir ağlraının karşılaştırılması ve sanayi işletmeli üzerinde uygulama.
Doktora Tezi, Erciyez Üniversitesi Sosyal Bilimler Fakültesi, 178s.
Vashisth, R., Chandara, A. (2010). Predicting stcok returns in nifty index: An
application of artificial neural network. International Research Journal of
Finance and Economics, ISSN 1450-2887, Issue 49, 15-24.
Vural, B. B. (2007). Yapay sinir ağları ile finanasal tahmin. Yüksek Lisans Tezi,
Ankara Üniversitesi Sosyal Bilimler Enstitüsü, 152s.
Yazıcı, M. (2007). Bankalarda kobi kredilerini değerlendirmeye ilişkin bir yaklaşım:
Yapay sinir ağları. Doktora Tezi, Kadir Has Üniversitesi Sosyal Bilimler
Enstitüsü, 150s.
52
Yıldırım, Ş. (2002). Artificial neural network applications to control. Erciyes
Üniversitesi Fen Bilimleri Enstitüsü Dergisi, Cilt 18, Sayı 1-2.
Yıldız, B., Yezegel, A. (2010). Fundamental analysis with artifical neural network. The
International Journal of Business and Finance Research, Volume 4, Number 1.
Yıldız, Ö. (2006). Döviz kuru tahmininde yapay sinir ağlarının kullanımı. Yüksek
Lisans Tezi, Eskişehir Osmangazi Üniversitesi Sosyal Bilimler Enstitüsü, 148s.
Yurtoğlu, H. (2005). Yapay sinir ağları metodolojisi ile öngörü modellemesi: Bazı
makroekonomik değişkenler için Türkiye örneği. Uzmanlık Tezi, Devlet Planlama
Teşkilatı-Uzmanlık Tezleri, Yayın No:2683, 103s.
53
ÖZGEÇMİŞ
Adı Soyadı
: Zuhat ERGİN
Doğum Tarihi
: 19.10.1985
Doğum Yeri
: Diyarbakır/Ergani
Email adresi
: [email protected]
EĞİTİM DURUMU
Yüksek Lisans
: 2007-2012 Çukurova Üniversitesi/ Adana
Sosyal Bilimler Enstitüsü
Ekonometri Anabilim Dalı
Lisans
: 2003-2007 Çukurova Üniversitesi/Adana
Fen-Edebiyat Fakültesi
Matematik Bölümü
Lise
: 1999-2002 Çağrıbey Lisesi/Adana