YÜKSEK FREKANSLI GAUSS HÜZMESİNİN PLAZMA ORTAMLA
ETKİLEŞİMİ
Selçuk Alparslan AVCI
YÜKSEK LİSANS TEZİ
ELEKTRİK – ELEKTRONİK MÜHENDİSLİĞİ ANABİLİM DALI
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
HAZİRAN 2014
Selçuk Alparslan AVCI tarafından hazırlanan “YÜKSEK FREKANSLI GAUSS
HÜZMESİNİN PLAZMA ORTAMLA ETKİLEŞİMİ” adlı tez çalışması aşağıdaki jüri
tarafından OY BİRLİĞİ ile Gazi Üniversitesi Elektrik-Elektronik Mühendisliği Anabilim
Dalında YÜKSEK LİSANS TEZİ olarak uygun olduğunu onaylarım.
Danışman: Doç. Dr. Erkan AFACAN
Elektrik – Elektronik Mühendisliği Anabilim Dalı, G. Ü.
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
…….…….……………………………
Başkan: Prof. Dr. Erdem YAZGAN
Elektrik – Elektronik Mühendisliği Anabilim Dalı, H.Ü.
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
…….…….……………………………
Üye: Doç. Dr. Mehmet Timur AYDEMİR
Elektrik – Elektronik Mühendisliği Anabilim Dalı, G.Ü.
Bu tezin, kapsam ve kalite olarak Yüksek Lisans Tezi olduğunu onaylıyorum
…….…….…………………………....
Tez Savunma Tarihi: 11/06/2014
Jüri tarafından kabul edilen bu tezin Yüksek Lisans Tezi olması için gerekli şartları yerine
getirdiğini onaylıyorum.
…….…………………….
Prof. Dr. Şeref SAĞIROĞLU
Fen Bilimleri Enstitüsü Müdürü
ETİK BEYAN
Gazi Üniversitesi Fen Bilimleri Enstitüsü Tez Yazım Kurallarına uygun olarak
hazırladığım bu tez çalışmasında;
Tez içinde sunduğum verileri, bilgileri ve dokümanları akademik ve etik kurallar
çerçevesinde elde ettiğimi,
Tüm bilgi, belge, değerlendirme ve sonuçları bilimsel etik ve ahlak kurallarına uygun
olarak sunduğumu,
Tez çalışmasında yararlandığım eserlerin tümüne uygun atıfta bulunarak kaynak
gösterdiğimi,
Kullanılan verilerde herhangi bir değişiklik yapmadığımı,
Bu tezde sunduğum çalışmanın özgün olduğunu,
bildirir, aksi bir durumda aleyhime doğabilecek tüm hak kayıplarını kabullendiğimi beyan
ederim.
Selçuk Alparslan AVCI
iv
YÜKSEK FREKANSLI GAUSS HÜZMESİNİN PLAZMA ORTAMLA ETKİLEŞİMİ
(Yüksek Lisans Tezi)
Selçuk Alparslan AVCI
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Haziran 2014
ÖZET
Sayısal yöntemler, elektromanyetik problemlerin çözümünde uzun yıllardan beri
kullanılmaktadır. Elektromanyetik problemlerin deneysel modellerinin oluşturulmasındaki
zorluklar, çözümlerin bilgisayar ortamında sayısal olarak gerçekleştirilmesini zorunlu
kılmaktadır. Bilgisayar teknolojisinin gelişmesi sayısal yöntemlerin yaygın bir şekilde
kullanılmasına yol açmıştır. Son yıllarda en çok kullanılan sayısal yöntemlerden bir tanesi
zaman bölgesinde sonlu farklar yöntemidir (FDTD). Bu tez çalışmasında, elektromanyetik
dalgaların iki boyutlu plazma ortam içindeki yayılmaları zaman bölgesinde sonlu farklar
yöntemi kullanılarak incelenmiştir. PML ve Mur tipi sınır koşulları kullanılarak
elektromanyetik dalganın problem uzayının sınırlarında nasıl davrandığı araştırılmıştır.
Simülasyonlar için C++ ve MATLAB programlama ortamları kullanılmıştır.
Bilim Kodu
: 905.1.034
Anahtar Kelimeler
: Zaman Bölgesinde Sonlu Farklar, Yayılma, Plazma Ortam,
Gauss Hüzmesi
Sayfa Adedi
: 65
Danışman
: Doç. Dr. Erkan AFACAN
v
HIGH FREQUENCY GAUSSIAN BEAM INTERACTİON WITH PLASMA MEDIUM
(M.Sc. Thesis)
Selçuk Alparslan AVCI
GAZİ UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
June 2014
ABSTRACT
Numerical methods have been used for the solution of electromagnetic problems for long
years. The difficulties of the establishment of experimental models of electromagnetic
problems have forced the solutions to be realized numerically in computer environments.
The advancement of the computer technology has led the numerical methods to obtain a
widespread usage. One of the most frequently used numerical methods in recent years is
finite difference time domain method (FDTD). In this thesis, the propagation of
electromagnetic waves in a two dimensional plasma medium is investigated via finite
difference time domain method. The behaviour of electromagnetic waves at the boundaries
of the problem space has been studied by using PML and Mur type boundary conditions.
For simulations C++ and MATLAB programming environments are used.
Science Code
: 905.1.034
Key Words
: Finite Difference Time Domain, Propagation, Plasma
Medium, Gaussian Beam
Page Number
: 65
Supervisor
: Assoc. Prof. Dr. Erkan AFACAN
vi
TEŞEKKÜR
Çalışmalarım boyunca değerli yardım ve katkılarıyla beni yönlendiren çok kıymetli Hocam
Doç. Dr. Erkan AFACAN’a teşekkür ederim. Ayrıca çalışmalarımda manevi destekleri ile
beni hiçbir zaman yalnız bırakmayan aileme teşekkürü bir borç bilirim.
vii
İÇİNDEKİLER
Sayfa
ÖZET ...........................................................................................................................
iv
ABSTRACT ..................................................................................................................
v
TEŞEKKÜR ..................................................................................................................
vi
İÇİNDEKİLER .............................................................................................................
vii
ŞEKİLLERİN LİSTESİ ................................................................................................
ix
SİMGELER VE KISALTMALAR ...............................................................................
xi
1. GİRİŞ ...................................................................................................................
1
2. ZAMANDA SONLU FARKLAR ................................................................
3
2.1. Literatür Özeti .................................................................................................
3
2.2. Maxwell Denklemleri .....................................................................................
4
2.3. Elektromanyetik Dalgalar ...............................................................................
7
2.4. Elektromanyetikte Sayısal Yöntemler ............................................................
8
2.4.1. FDTD yönteminin avantajları .............................................................
10
2.4.2. FDTD yönteminin dezavantajları ........................................................
11
2.4.3. FDTD yöntemi .....................................................................................
11
2.4.4. Kararlılık (Courant) koşulu ..................................................................
17
2.5. Sayısal Dağılım (Dispersiyon) ........................................................................
18
2.6. Sınır Koşulları .................................................................................................
19
2.6.1. Tek yönlü dalga denklemleri ..............................................................
20
2.6.2. Mur tipi sınır koşulları .......................................................................
24
2.6.3. Mükemmel uyumlandırılmış plaka ......................................................
25
3. ELEKTROMANYETİKTE PLAZMA ORTAMI ....................................
33
3.1. Plazma Kriterleri .............................................................................................
33
3.2. İzotropik Plazma ve İletken Dağılımı .............................................................
34
4. KAYNAK PARAMETRELERİNİN SEÇİMİ ..........................................
39
4.1. FDTD Algoritması ..........................................................................................
43
4.2. İki Boyutlu FDTD Uygulaması ......................................................................
44
5. SİMÜLASYON SONUÇLARI .....................................................................
47
5.1. İki Boyutlu TM Dalgasının Simülasyonu .......................................................
47
viii
Sayfa
5.2. İki Boyutlu TM Dalgasının PML Uygulanmış Hali İle Simülasyonu ............
49
5.3. İki Boyutlu TM Dalgasının İki Farklı Ortamda İken PML Uygulanmış Hali
İle Simülasyonu ..............................................................................................
51
5.4. İki Boyutlu TM Dalgasının İki Farklı Ortamda İken Mur Tipi ABC
Uygulanmış Hali İle Simülasyonu ..................................................................
55
SONUÇ VE ÖNERİLER ................................................................................
61
KAYNAKLAR .............................................................................................................
62
ÖZGEÇMİŞ ..................................................................................................................
64
6.
ix
ŞEKİLLERİN LİSTESİ
Şekil
Sayfa
Şekil 2.1.
Elektrik Alan ve Manyetik Alan Yayılımı ..........................................
7
Şekil 2.2.
Elektromanyetik Spektrum ..................................................................
8
Şekil 2.3.
Birim Yee hücresi ve Alan bileşenlerinin yerleşimi ............................
13
Şekil 2.4.
Birim Yee hücresinde xy ve yz düzlemlerindeki bileşenler ................
15
Şekil 4.1.
Gauss darbesinin normalize zaman ve frekans davranışı ....................
40
Şekil 4.2.
Sınırlı banda sahip bir işaretin örnekleme sıklığı ile ilişkisi ...............
40
Şekil 4.3.
Ana FDTD döngüsü ve yinelemeli adımları .......................................
43
Şekil 5.1.
Elektromanyetik dalganın adım adım ilerlemesi .................................
47
Şekil 5.2.
Elektromanyetik dalganın adım adım ilerlemesi .................................
48
Şekil 5.3.
Elektromanyetik dalganın adım adım ilerlemesi .................................
48
Şekil 5.4.
PML uygulanmış elektromanyetik dalganın ilerlemesi .......................
49
Şekil 5.5.
PML uygulanmış elektromanyetik dalganın ilerlemesi .......................
50
Şekil 5.6.
PML uygulanmış elektromanyetik dalganın ilerlemesi .......................
50
Şekil 5.7.
Plazma ortamının oluşturulduğu x yönündeki konumları ...................
51
Şekil 5.8.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
52
Şekil 5.9.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
52
Şekil 5.10.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
53
Şekil 5.11.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
53
Şekil 5.12.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
54
Şekil 5.13.
İki farklı ortamda PML uygulanmış EM dalganın ilerlemesi .............
54
Şekil 5.14.
Plazma ortamının oluşturulduğu x yönündeki konumları ...................
55
Şekil 5.15.
50 zaman adımı sırasında elektromanyetik dalganın durumu .............
56
x
Şekil
Sayfa
Şekil 5.16.
100 zaman adımı sırasında elektromanyetik dalganın durumu ...........
56
Şekil 5.17.
300 zaman adımı sırasında elektromanyetik dalganın durumu ...........
57
Şekil 5.18.
50 zaman adımı sırasında elektromanyetik dalganın durumu .............
58
Şekil 5.19.
100 zaman adımı sırasında elektromanyetik dalganın durumu ...........
58
Şekil 5.20.
300 zaman adımı sırasında elektromanyetik dalganın durumu ...........
59
xi
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış bazı simgeler ve kısaltmalar, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler
Açıklama
B
Manyetik Akı Yoğunluğu
c
Işık Hızı
D
Elektrik Akı Yoğunluğu
E
Elektrik Alan Şiddeti
Ex
Elektrik Alanın x bileşeni
Ey
Elektrik Alanın y bileşeni
Ez
Elektrik Alanın z bileşeni
f
Frekans
H
Manyetik Alan Şiddeti
Hx
Manyetik Alanın x bileşeni
Hy
Manyetik Alanın y bileşeni
Hz
Manyetik Alanın z bileşeni
I
Akım
i , j, k
x, y, z’deki Hücre İndisleri
J
Akım Yoğunluğu
n
Zaman Adımı
N
FDTD Hücre Sayısı
q
Yük
T
Periyot
V
Gerilim
Açısal Hız
0
Boşluğun Dielektrik Sabiti
r
Bağıl Dielektrik Sabiti
İletkenlik Katsayısı
xii
Simgeler
Açıklama
0
Boşluğun Manyetik Geçirgenlik Katsayısı
r
Bağıl Manyetik Geçirgenlik Katsayısı
Dalga Boyu
min
En Küçük Dalga Boyu
t
Zaman Adımı Uzunluğu
x
x Yönündeki Hücre Mesafesi
y
y Yönündeki Hücre Mesafesi
z
z Yönündeki Hücre Mesafesi
Manyetik Akı
Yük yoğunluğu
Kısaltmalar
Açıklama
ABC
Emici Sınır Koşulları (Absorbing Boundary Conditions)
ABS
Açık Bölge Simülasyonu
EM
Elektromanyetik
FDTD
Zaman Bölgesinde Sonlu Farklar Yöntemi (Finite Difference Time
Domain)
PML
Mükemmel Uyumlandırılmış Plaka (Perfectly Matched Layer)
TE
Enine Elektrik (Transverse Electric)
TM
Enine Manyetik (Transverse Magnetic)
1
1. GİRİŞ
Günümüzün elektronik teknolojileri hızla ilerlemekte olup oluşan ihtiyaçlara göre çok fazla
yeni malzeme ve cihaz ortaya çıkmaktadır. Bu yeni çıkarılan cihazlarla mevcut cihazların
birlikte sorunsuz çalışmaları için tasarım aşamasında pek çok ölçüt göz önüne alınmalıdır.
Örnek olarak, aynı ortamda telsiz, telefon, cep telefonu, bilgisayar işlemcisi ve radyo gibi
değişik güç ve frekanstaki cihazların aynı anda çalışması sırasında görevlerini yerine
getirebilmeleri istenir. Bundan dolayı araştırma ve geliştirme mühendisleri tarafından
bilgisayar ortamında tasarım araçlarıyla sorunların kaynağı aranmalı ve çözümler
üretilmelidir [1].
Elektromanyetik problemlerin çözümü için hem sorunların temelinde yatan fiziksel
nedenler bilinmeli hem de kullanılan sayısal algoritmalar hakkında yeterli bilgiye sahip
olunmalıdır. Elektromanyetik problemlerin çözümünde analitik yöntemlerin yetersiz
kaldığı yapılarda, günümüz bilgisayar teknolojisindeki gelişmelere de paralel olarak sayısal
yöntemler daha başarılı bir şekilde uygulanmaya başlamıştır. Literatürde kısaca FDTD
olarak bilinen zaman bölgesinde sonlu farklar yöntemi, İngilizce Finite Difference Time
Domain
kelimelerinin
kısaltmasıdır.
Yöntem,
diferansiyel
formdaki
Maxwell
denklemlerinin doğrudan zamanda ve konumda, merkezi farklar yöntemine göre
ayrıklaştırılıp iteratif olarak adım adım çözülmesine dayanır. İlk kez 1966 yılında Kane S.
Yee tarafından ortaya atılmasından bu yana FDTD, hemen her türlü elektromanyetik
problemin çözümünde kullanılan bir yöntem olmuştur. Yöntemin öncelikli uygulamaları,
farklı türdeki ortamlarda darbe iletimi, geniş bantlı analizler ile özellikle biyomedikal
alanında doku analizleri üzerine olmuştur. Bu uygulamalarda FDTD yöntemi, önceleri ele
alınan ortam içerisinde ilgilenilen cisimlerin yakın civarındaki alanların hesabında
kullanılmıştır. Atmosferden biyolojik materyallere ve deniz altılara kadar farklı özelliklere
sahip her ortamda elektromanyetik saçılım ve yayılım karakteristiklerinin incelenmesinde
ve gerekli çözümlemelerin yapılmasında yaygın olarak kullanılan bir nümerik çözüm
yöntemi olmuştur. FDTD yöntemi analitik türev operatörünün sayısallaştırılmasına dayanır
ve sonlu farklar olarak isimlendirilir [2].
Elektromanyetik dalga yayılımını modelleyen Maxwell denklemlerinin sonlu farklar ile,
zamana göre türevlerinin de sayısallaştırılarak genelleştirilmesi, FDTD yöntemi adıyla
anılmaktadır. Zaman bölgesinde sonlu farklar yönteminin öne çıkan bir özelliği,
bilgisayarla ilişkili bir yöntem olmasıdır. Elektromanyetik teori için gerekli olan analitik
2
çözümlerin uzun ve bilgisayar yazılımına elverişli olmaması, bu işlemlerin, bu tür bir
yöntem ile yapılmasını gerekli kılar [3].
Bu tezde FDTD yönteminin elektromanyetik dalga çözümlemelerinde kullanılmasının
avantaj ve dezavantajları incelenmiştir. Maxwell denklemlerine FDTD yöntemi
uygulanarak 2 boyutlu Maxwell denklemlerinin hem TE(transverse electric) hem de TM
(transverse magnetic) dalga modları için denklemleri yeniden oluşturulmuştur. Oluşturulan
Maxwell denklemlerinin Yee hücresine nasıl yerleştirileceği gösterilmiştir. FDTD yöntemi
kullanılarak plazma ortamı ve plazma ortamının dielektrik sabitinin frekansa bağlı olarak
nasıl değiştiği incelenmiş, bir elektromanyetik dalganın farklı ortamlarda yayılırken nasıl
değişime
uğradığı
simüle
edilmiştir.
Elektromanyetik
dalganın
serbest
uzayda
yansımalardan kaynaklanan kayıpları engellemek ve hesaplamalarımızı daha doğru
yapabilmek için iki farklı yöntem kullanılmıştır. Bunlardan biri 1981 yılında G. Mur
tarafından ortaya atılan emici sınır koşulları, diğeri ise 1994 yılında Berenger tarafından
ortaya atılan emici sınır koşullarıdır. Serbest uzayda yayılırken plazma ortamı ile
karşılaşan bir dalganın plazma ortamı içindeki davranışı incelenmiştir. Bu incelemeler
sırasında her iki emici sınır koşulu ayrı ayrı kullanılmıştır. Tezin son kısmında C++ ve
MATLAB programları kullanılarak 2 boyutlu simülasyon sonuçları eklenmiştir.
3
2. ZAMAN BÖLGESİNDE SONLU FARKLAR (Finite Difference Time
Domain, FDTD)
Zaman Bölgesinde Sonlu Farklar yöntemi, elektromanyetik problemlerin çözümü için en
çok kullanılan sayısal yöntemlerden biridir. FDTD yöntemi otuz yıldan daha fazla bir
süredir var olmasına rağmen, bilgisayarların hız ve kapasiteleri artması ile birlikte
yöntemin popülaritesi artmaya devam edecektir. Ayrıca yöntemin güncelleştirilmesine
yönelik kitapların ve yayınların artması da yöntemin çekiciliğini artırmaktadır.
2.1 Literatür Özeti
FDTD ilk olarak 1966 yılında Kane S. Yee tarafından tanıtılmıştır. Yee, Maxwell
denklemleri için izotropik ortamlarda başlangıç sınır değer problemlerinin çözümünü
doğrudan zaman bölgesinde bu sayısal yöntem ile gerçekleştirmiştir [4].
Taflove ve Brodwin (1975), sinüzoidal kararlı durum elektromanyetik saçılma
problemlerinin sayısal çözümüne yönelik olarak Yee’nin algoritmaları için doğru sayısal
kararlılık kriterini elde etmişlerdir [5].
Taflove (1980), dielektrik veya iletken cisimler üzerine nüfuz eden sinüzoidal kararlıdurum elektromanyetik alanların belirlenmesinde kullanılacak sayısal yöntemi ortaya
çıkartmış ve bu yöntem kübik birim hücre uzay kafesine uygulayarak FDTD yöntemi ile
Maxwell denklemlerinin rotasyonel çözümünü vermiştir [6].
Mur (1981), Yee hücrelerinin kararlı sınır koşulları için emici elektromanyetik alan
denklemlerini zamanda sonlu farklar yöntemi ile düzenlemiş, bunun sonucunda iki ve üç
boyutlu yapılarda kullanılabilecek elektromanyetik denklemlerin sunulmasıyla elde edilen
sayısal sonuçların emici sınır şartları açısından daha doğru olarak uygulanabileceğini
göstermiştir [7].
Taflove ve Umashankar (1982), FDTD kullanarak kompleks yapıya sahip model cisimler
üzerinde uzak ve yakın alan için iki boyutlu radar kesit alanı hesaplamaları yapmışlardır
[8].
4
Berenger (1994), Berenger tarafından geliştirilen yöntem en esnek ve etkili soğurma
yöntemlerinden biridir. Bir A ortamında yayılan elektromanyetik dalganın farklı bir B
ortamı ile karşılaşması durumunda, yansıma miktarı ortamların dielektrik sabitlerine ve
manyetik geçirgenlik sabitlerine bağlı olarak değişir [9].
2.2 Maxwell Denklemleri
Maxwell denklemleri uzayın herhangi bir noktasında ve zamanın herhangi bir anında
elektrik ve manyetik alan değerlerini birbirine bağlar. Bu nedenle elektromanyetik dalgalar
Maxwell denklemleriyle tanımlanır. Gauss yasasına göre bir yüzey parçası üzerinde E
alanının akısı, o yüzeyi kesen çizgilerin sayısıyla orantılıdır. Burada, bir yükü çevreleyen
kapalı bir yüzeyden geçen akı
q
0
ile verilir. Böylece,
q
E. ds
(2.1)
0
olur. Burada q yükü kapalı yüzey içinde kalan yüklerin toplamıdır. Bu yüzeyin dışında
kalan bir yükün akıya katkısı sıfır olur, çünkü bu yüklerin alan çizgileri yüzeyin bir
yerinden girip, başka bir yerinden çıkarlar.
Gauss yasasında verilen (2.1) ifadesine diverjans teoremi uygulanırsa,
yüzey
E . ds
q
. E dv
0
hacim
(2.2)
olur ve q .dv olduğundan,
dv
.
E
.
dv
0
bulunur. Bu durumda birinci Maxwell denklemi aşağıdaki gibi elde edilir.
(2.3)
5
.E
0
(2.4)
Manyetizma için Gauss Kanunu, doğada izole edilmiş manyetik kutupların var
olamayacağını gösterir, yani herhangi bir kapalı yüzey boyunca manyetik akı sıfırdır.
B .ds 0
(2.5)
(2.5) denklemine diverjans teorimi uygulanırsa ikinci Maxwell denklemi aşağıdaki gibi
elde edilir.
. B 0
(2.6)
Faraday Kanununa göre, sabit manyetik alan içinde hareket ettirilen iletken çerçevede
indüklenen gerilim,
d
dt
(2.7)
ile verilir. Faraday Kanununun integral ifadesi,
E. dl
d
dt
(2.8)
olduğundan, (2.8) denklemine Stokes teoremi uygulanırsa,
E
.
dl
x E ds
(2.9)
ve
d d
B . ds
dt dt
(2.10)
6
elde edilir. Böylece üçüncü Maxwell denklemi aşağıdaki gibi bulunur.
dB
xE
dt
(2.11)
Amper Kanununa göre,
B . dl 0 I
(2.12)
olur. Burada I =
J . ds olduğundan, Stokes teoremine göre,
S
B
.
dl
x
B
ds
0
J . ds
(2.13)
bulunur. Buradan dördüncü Maxwell denklemi aşağıdaki şekilde bulunur.
dE
x B 0 J 0 0
dt
(2.14)
Buna göre manyetik alanın oluşması için ya elektrik alanın zamana bağlı olarak değişmesi
ya da bir akımın varlığı gereklidir [10].
Böylece dört adet Maxwell denklemi (2.4), (2.6), (2.11) ve (2.14) denklemlerindeki gibi
elde edilmiş olur.
Boşlukta yük yoğunluğu ve J akım yoğunluğu sıfır olduğu için Maxwell denklemleri
aşağıdaki gibi yazılabilir.
.E 0
(2.15)
. B 0
(2.16)
dB
xE
dt
(2.17)
7
dE
x B 0 0
dt
(2.18)
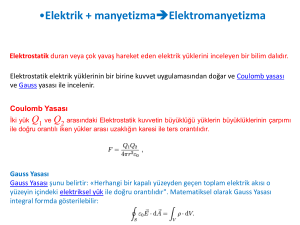
2.3 Elektromanyetik Dalgalar
Elektromanyetik dalgalar kuramı, doğanın dört temel elektriksel etkileşim denklemini
James Clark Maxwell’in bir araya toplaması ile oluşturulmuştur. Işığın değişken bir
manyetik alanı ( B ) ve yine değişken ve manyetik alana dik doğrultuda olan bir elektrik
alan ( E )'den oluştuğu önermesinde bulundu. E ve B 'nin oranı her noktada aynı idi.
Dalgaların ilerleyebilmeleri için herhangi bir ortam gerekmiyordu ve Maxwell bu
elektromanyetik dalgaların uzay boşluğunda 2,998 m/s 'lik hızla ilerlediklerini göstermiştir.
Her dalga gibi bu dalgalar da devamlı dalgalar idi. Daha sonra Heinrich
Hertz’in elektromanyetik dalgaları oluşturmak ve saptamak için yaptığı araştırmalar
Maxwell’in teorik çalışmalarını ispatı niteliğindeydi. Elektromanyetik dalgalar bu
araştırmalarla birlikte uygulamalı olarak ta kanıtlanmış oldu. Elektromanyetik dalganın
ilerleme yönü ise hem elektrik hem de manyetik bileşenlere dik bir yöndedir. Örneğin;
düzlem bir elektromanyetik dalgada elektrik alan +x yönünde, manyetik alan +y ekseni
üzerinde ilerliyorsa, dalganın ilerleme yönü bu iki eksene dik olan +z ekseni yönünde
olacaktır. Elektromanyetik dalgaların, Maxwell’in denklemlerinden yararlanarak elektrik
alanın manyetik alanı, manyetik alanında elektrik alanı doğurması ile bir döngü şeklinde
ilerlediği söylenebilir.
Şekil 2.1 Elektrik alan ve manyetik alan yayılımı
Elektromanyetik dalgalar uzay boşluğunda ışık hızıyla yayılır ve Maxwell denklemleriyle
tanımlanır. Elektromanyetik dalgaların farklılığı dalga boylarının farklı olmasından
8
kaynaklanır. c f (λ dalga boyu, c ışık hızı, f frekans) denklemine göre frekans arttıkça
dalga boyu küçülür, frekans azaldıkça dalga boyu büyür.
Elektromanyetik Spektrum geniş bir frekans aralığını kapsar (Şekil 2.2). Bütün
elektromanyetik dalgalar, spektrumun hangi bölgesinde olursa olsun daima ışık hızında
hareket ederler.
Şekil 2.2 Elektromanyetik spektrum
2.4 Elektromanyetikte Sayısal Yöntemler
Günümüzde hemen hemen her türlü araç için bir elektrikli cihaz kullanılmaktadır. Bu
cihazlar, basitten karmaşığa, belli bir araştırma ve tasarım sonucu ortaya çıkmaktadır.
Araştırma ve tasarım mühendislerinin başvurdukları en etkili araç ise bilgisayar destekli
olanıdır.
Artık,
mühendislerin
herhangi
bir
yapıyı
incelemek
ve
özelliklerini
9
değiştirebilmek amacıyla el altında bu işi kolay ve hızlı bir şekilde yapabilecek araçlar
istemektedirler.
Günümüz bilgisayar destekli ve tasarım araçları, sadece belli bir elektronik ürüne yönelik
olmasının ötesinde, aynı alanda bulunduğu diğer cihazlarla da manyetik olarak uyumlu
çalışmasını göz önünde bulundurmak zorundadırlar. Örneğin,
Çalan cep telefonunun televizyon üzerindeki etkisi
Baz istasyonlarının yaydığı elektromanyetik enerjinin insan sağlığı üzerindeki etkisi
gibi konuların incelenebilmesi ancak güçlü simülasyon teknikleri ile olasıdır.
Diğer alanlarda da olduğu gibi, elektromanyetik problemlerin çözümünde de analitik
yöntemler ancak basitleştirilmiş ve idealleştirilmiş yapılar için elde edilebilmektedir.
Örneğin, ele alınan cisim karmaşık olsa da ilk olarak küresel, silindirik ya da dikdörtgen
olarak düşünülür. Bu basitleştirme yapının kendisi açısından ne kadar aykırı olursa olsun
problemin fiziği hakkında bilgi taşıdığından gereklidir. Bu tip basit yapılarda elde edilen
fiziksel bilgi sayesinde karmaşık yapılarda ve gerçeğe yakın koşullarda analitik yaklaşık ya
da salt sayısal yöntemlerin güvenli olarak uygulanması sağlanabilir.
Elektromanyetik problemlerin çözümünde birçok yöntem bulunmaktadır. Birden çok
yönteme gereksinim duyulmasının sebebi her problem için farklı çözüm gereksinimidir.
Yani, her yöntem belli koşullarda, belli problemlerde iyi sonuç verirken, farklı
problemlerde aynı yöntem istenilen hassas sonuçları verememektedir.
Elektromanyetik problemlerinin çözümünde en çok kullanılan sayısal yöntemler,
Zaman Bölgesinde Sonlu Farklar (FDTD, Finite Difference Time Domain) Yöntemi
İletim Hattı Matrisi (TLM, Transmission Line Matrix) Yöntemi
Parabolik Denklem (PE, Parabolic Equation) Yöntemi
Moment Yöntemi (MoM, Method of Moment)
Sonlu Elemanlar Yöntemi (FEM, Finite Element Method) olarak sıralanabilir.
FDTD yöntemi, diferansiyel formdaki Maxwell denklemlerinin zaman bölgesinde
ayrıklaştırıp çözülmesidir. İlk iki Maxwell denklemindeki (Gauss Yasası, Manyetik alan
için Gauss Yasası) diferansiyel operatörler sayısallaştırılıp sonlu farklar eşdeğerleri ile
değiştirilir. Böylece elde edilen ayrık denklemler (ele alınan yapıya ait sınır koşulları da
dikkate alınarak) yinelemeli olarak çözülür. Üç elektrik alan ve üç manyetik alan
bileşeninin uzayın seçilen ayrık noktalarında ayrık zaman aralıklarında çözümlenmesine
10
dayanır. Bundan dolayı, yüksek hızlı ve kapasiteli bilgisayarlara ihtiyaç vardır. İşaret
kaynağı olarak sinüzoidal (dar bantlı) veya darbesel (geniş bantlı) kaynak tercih edilebilir.
FDTD yönteminin uygulanmasında en önemli özellik, çözülmeye çalışılan nesnenin
fiziğinin iyi anlaşılması ve her adımda gözlenmesidir.
2.4.1 FDTD yönteminin avantajları
FDTD yönteminde sinüzoidal işaretlerin simülasyonu yapılabildiği gibi, Gauss darbesi gibi
darbesel işaretlerin de simülasyonu yapılabilmektedir. Bundan dolayı daha geniş frekans
aralığında çözüm elde edilebilmektedir.
FDTD, rezonans frekansının tam olarak
bilinemediği veya herhangi bir anda istenilen geniş bantlı sonuçların elde edilemediği
uygulamalarda oldukça kullanışlı bir yöntemdir. Zaman bölgesinde depolanan verilerin
frekans
bölgesine
kolaylıkla
dönüştürülmesi
ile
istenilen
frekans
spektrumuna
ulaşılabilmektedir.
FDTD
yöntemi
ile
ilgilenilen
yapılar
yüksek
doğrulukla
ve
kolaylıkla
modellenebilmektedir. FDTD yöntemi, diğer bazı sayısal yöntemler gibi çok büyük matris
yapıları içermediğinden ulaşılan çözümler oldukça güçlü olmaktadır. Zaman bölgesinde
yapılan çözümler sonucu elektromanyetik dalgaların hareketleri görsel olarak istenilen
zamanlarda izlenebilmekte ve incelenen yapının dalga yayılımı açısından anlaşılması
kolaylaşmaktadır [11]. FDTD metodu ile elektrik ve manyetik alan bileşenleri hesap
uzayının her noktasında doğrudan bulunur. FDTD kodu özünde hacimsel olmasına karsın,
ince plakaları ve ince çubuk antenleri de başarılı bir şekilde ele almaktadır.
FDTD yönteminin kullanıldığı alanlardan bazıları;
Radar sistemleri
Mikrodalga devreleri, dalga kılavuzları ve fiber optik
Anten
Yayılma
Medikal uygulamalar
Elektromanyetik uyumluluk
Plazma
olarak sıralanabilir [12].
11
2.4.2 FDTD yönteminin dezavantajları
FDTD yöntemi çözüm uzayın ızgaralanmasını gerektirir. Bu ızgaraların boyutları
modellenen en küçük dalga boyundan daha küçük olmalıdır. Bu da çok geniş hesaplama
uzayı ve çözüme ulaşmak için uzun zaman gerektirir[11] .
2.4.3 FDTD yöntemi
FDTD Yöntemi, Maxwell denklemlerindeki kısmi türev operatörlerinin merkezi farklar
yöntemine dayalı sonlu farklar karşılıkları ile değiştirilip, doğrudan zaman ve konum
bölgelerinde sayısallaştırılmasına dayanır. Ele alınan problemde üç boyutlu hesap
uzayının, eş boyutlu Nx × Ny × Nz adet dikdörtgen prizmadan oluştuğu varsayılır.
Birbirinin özdeşi olan bu dikdörtgenler prizmasının boyutları, ∆x, ∆y ve ∆z olup, bu yapı
FDTD hücresi olarak adlandırılır. Hücre numaraları, i, j, k yerine sırasıyla, x, y ve z hücre
numarası olmak üzere tam sayılarla belirtilir. İlk kez Kane Yee tarafından 1966’da
belirtilen bu yöntem ile, her hücrede farklı yerlerde bulunan üç elektrik ve üç manyetik
alan bileşeni ayrıca aralarında zaman farkı olacak şekilde, yinelemeli olarak istenen zaman
süresince hesaplanır. T hesap süresi, n (tamsayı) zaman adımı, ∆t hesaplama zaman aralığı
olmak üzere, bütün simülasyon süresi boyunca her hücrede bulunan tüm bileşenler için
hesaplama yapılır [1]. Çözümler yinelemeli olduğundan zaman ve konum aralıkları
arasında belli bir kararlılık kriteri söz konusudur. Yani konumda ayrıklaştırma yapıldıktan
sonra zaman aralığı rastgele seçilemez. Ayrıca, FDTD ile zaman bölgesinde geniş bantlı
darbesel işaretlerin simülasyonu da söz konusu olduğundan simüle edilen en yüksek
frekanslı (en küçük dalga boylu, λmin) bileşen için sayısal dispersiyona neden olmayacak
konum örneklemesine dikkat edilmelidir. Pratikte sayısal dispersiyon sınırı, problemden
probleme ve istenen doğruluğa bağlı olarak değişmekle birlikte (∆x, ∆y ya da ∆z’nin en
büyüğü) λmin/100 ile λmin/4 arasında seçilebilmektedir. Maxwell denklemleri, uzayın
belli bir noktasında ve belli bir anda oluşan elektrik alan değerlerini birbirine bağlar.
H r , t
x E r , t
t
E r , t
x H r , t
J
t
(2.19)
(2.20)
12
Elektrik alanın konuma göre kısmi türevi manyetik alanın zamana göre kısmi türevine
ortam parametreleri ε (dielektrik sabiti), μ (manyetik geçirgenlik) ve σ (iletkenlik) ile
bağlıdır. İkinci Maxwell denkleminde ise bunun tersi söz konusudur.
Verilen bu iki denklem merkezi farklara göre ayrıklaştırılıp düzenlendiğinde uzayın her
noktasında üç elektrik ve üç manyetik alan bileşenini içeren yinelemeli denklemler elde
edilir. E ve H bileşenlerinin alternatif yarım zaman adımları değerlendirildikten sonra E ve
H bileşenlerinin açık sonlu fark yaklaşımları,
H x i, j , k H x
n
n 1
i, j, k
t
n
n
.E y i, j , k E y i, j , k 1
0 z
t
n
n
.E z i, j , k E z i, j 1, k
0 y
H y i, j , k H y
n
n 1
i, j, k
t
n
n
.E z i, j , k E z i 1, j , k
0 x
t
n
n
.E x i, j , k E x i, j 1, k
0 z
H z i, j , k H z
n
n 1
i, j, k
t
n
n
.E x i, j , k E x i, j 1, k
0 z
t
n
n
.E y i, j , k E x i 1, j , k
0 x
(2.21)
(2.22)
(2.23)
2.t
2 t n 1
n
n
E x i, j , k
E x i, j , k
H y i, j , k
2 t
2. .t.z
H y i, j , k 1
n
(2.24)
n
2t
H z i, j , k H z n i, j 1, k
2 ty
2t
2 t n 1
n
n
E y i, j , k
E y i, j , k
H z i, j , k
2 t
2 tx
H z i 1, j , k
n
2t
n
n
H x i, j , k H z i, j , k 1
2 tz
(2.25)
13
n
2t
2 t n 1
n
H x i, j , k
E z i, j , k
E z i, j , k
2 t
2 ty
H x i, j 1, k
n
(2.26)
2t
n
n
H y i, j , k H y i 1, j , k
2 tx
formülleri ile ifade edilebilir. Yinelemeli denklemlerinden de görüldüğü gibi, uzayın bir
noktasındaki manyetik alan bileşeni aynı noktada bir önceki kendi değeriyle birlikte diğer
eksenlerdeki komşu elektrik alan değerlerine bağlıdır.
Benzer şekilde, Ez bileşeni de zamanda bir önceki değeri ile birlikte komşu Hx ve Hy
değerleri ile hesaplanır. Yee bu mantıktan yola çıkarak Şekil (2.3)’de verilen hücre
yerleşimini ortaya çıkarmıştır.
Ey(i+1,j,k+1)
Ez(i+1,j,k)
Hz(i,j,k+1)
Ex(i,j,k+1)
Ex(i,j+1,k+1)
Ey(i+1,j,k)
Hy(i,j,k)
Ey(i,j,k+1)
Hz(i,j,k)
Ex(i,j,k)
Ex(i,j+1,k)
Ez(i,j,k)
Ez(i,j+1,k)
Hx(i,j,k)
X(i)
Z(k)
Y(j)
Ey(i,j,k)
Şekil 2.3 Birim Yee hücresi ve alan bileşenlerinin yerleşimi
Şekil 2.3’de verilen birim Yee hücresi komşu hücre indisleri ile birlikte gösterilmiştir. Bu
hücre yapısı incelendiğinde,
Her birim Yee hücresinde üç elektrik ve üç manyetik alan bileşeni bulunur. Her hücre (i,j,k)
etiketi ile anılır. Bunlar sırasıyla, x, y ve z’deki hücre indisleridir. Zamanda ve konumda
ayrıklaştırma adımları Δt ve Δx, Δy, Δz’dir. Yani herhangi bir alan bileşeni için,
14
i, j, k i. x , j. y , k. z , t n. t
(2.27)
anlamına gelmektedir.
Her ne kadar bir hücre içerisindeki altı bileşen de aynı (i, j, k) etiketi ile gösterilse de Şekil
2.3’den görüldüğü gibi, bu bileşenlerin hücre içi yerleşimi farklıdır. Örneğin, Ex, (i, j, k)
hücresinin x düzleminde kenar ortasında iken, Hz, (i, j, k) hücrenin xy düzleminde yüzey
ortasında bulunur. Yani elektrik alanlar hücre kenarlarında, manyetik alanlar hücre
yüzeylerindedir.
Aynı hücrede, elektrik ve manyetik alanların yerleşimleri gibi, hesaplandıkları zaman
adımları da farklıdır. Elektrik ve manyetik alanlar birbirinden Δt/2 kadar farklı
zamanlarda hesaplanırlar. Yani elektrik alan bileşenleri t=0, Δt, 2Δt, 3Δt vb.
adımlarında hesaplanırken, manyetik alanlar t=Δt/2, 3Δ/2, 5Δ/2 vb. adımlarında
hesaplanmaktadır. Böylece, hesaplama bir elektrik alanlar bir manyetik alanlar diye
yinelemeli olarak sürdürülür.
Aynı hücrede belli bir noktada elektrik ve manyetik alanlarından söz edebilmek için
konumda ve zamanda ortalama almak yeterlidir. Örneğin alan bileşenlerini hücre
merkezine ötelemek için iki manyetik alan bileşeni
H x i, j, k
1
H x i, j, k H x i 1, j, k
2
(2.28)
yeterlidir. Ancak elektrik alan bileşenleri için komşu dört bileşene gerek vardır.
E z i, j, k
1
E z i, j, k E z i 1, j, k E z i, j 1, k E z i, j, k 1
4
(2.29)
Yinelemeli FDTD denklemlerinde, herhangi bir ortam üç ortam parametresi ile temsil
edilir. Bunlar, dielektrik sabiti ε, manyetik alan geçirgenliği μ, ısıl kayıpları temsil
eden iletkenlik σ’dır. Bunlardan ε ve σ, elektrik alan bileşenlerinin hesaplandığı
denklemlerde, μ ise manyetik alan bileşenlerinin hesaplandığı denklemlerde
görünmektedir.
15
Hücrelerde elektrik ve manyetik alan bileşenleri için farklı ortam parametreleri (ε, σ ve
μ) belirlenerek ince teller ya da elektrik ve manyetik ince tabakalar vb. modellenebilir.
Örneğin, dört hücre uzunluklu sonsuz ince tel anteni z boyunca k. hücreden itibaren
yerleştirmek için (l =4Δz) FDTD simülasyonu süresince
E z i, j, k E z i, j, k 1 E z i, j, k 2 E z i, j, k 3 0
(2.30)
yazmak yeterlidir. Diğer alan bileşenleri yinelemeli denklemlerinden hesaplanırken bu dört
hücredeki Ez bileşenleri sıfırlanarak bu anten modellenmiş olur. Benzer şekilde (i,j,k)
hücresinin ön yüzeyini (xy-düzlemi) sonsuz ince iletken bir tabaka ile kaplamak için (Şekil
2.4)
E x i, j, k E x i, j 1, k 0
(2.31)
E y i, j, k E y i 1, j, k 0
(2.32)
yazmak yeterlidir.
Ex(i,j,k)
+
Ey(i+1,j,k)
Ez(i,j,k+1)
+
+
+
H
Ez(i,j,k)
Ex(i,j+1,k)
+
+
H
Ez(i,j+1,k)
Hx(i,j,k)
H
Z
X
+
+
E
E
Y
Y
Şekil 2.4 Birim yee hücresinde xy ve yz düzlemlerindeki bileşenler
FDTD simülasyonu boyunca elektrik ve manyetik alanlar güncellenmektedir. Buna
karşın, bu alan değerlerinden herhangi bir noktada gerilim ya da akım hesabı kolayca
yapılabilir. Herhangi bir (i,j,k) hücresindeki gerilim ve akım Gauss ve Amper
yasasından elde edilir. Örneğin Vz ve Iz
Vz i, j, k E z i, j, k * z
I z i, j , k H x i, j 1, k H x i, j , k * x
H y i, j , k H y i 1, j , k * y
(2.33)
(2.34)
16
kullanılarak hesaplanır.
FDTD simülasyonu ile hem sinüzoidal hem de darbesel kaynaklar modellenebilir.
FDTD simülasyonunun en önemli adımı birim Yee hücresinin iyi anlaşılmasıdır. Bu
anlaşılmadan alan ve devre büyüklüklerinin hesaplanması, konumda ve zamanda
senkronizasyonun sağlanması son derece zordur. Birim hücrede yerleşim ve ortam
parametrelerinin belirlenmesi anlaşıldıktan sonra, diğer önemli adımlar geçilebilir. FDTD
yöntemi ile üç boyutlu herhangi bir elektromanyetik problem ele alınabilir. FDTD hesap
uzayı, üç boyutlu kartezyen koordinat sisteminde Xmin, Ymin, Zmin ile Xmax, Ymax,
Zmax düzlemleri arasında kalan bölgeyi Nx*Ny*Nz adet Yee hücresine bölerek
incelenmektedir. Genelde FDTD ile modellenen bütün elektromanyetik problemlerde ele
alınan yapı etrafında ancak 3-5 dalga boyu mesafe kalır. Yani FDTD hesap uzayı içerisinde
Maxwell denklemleri kullanarak ancak yakın alanlar simüle edilebilir.
FDTD tekniğinde önemli sorunlardan birisi de açık bölge (ABS) simülasyonudur. Eğer
rezonatör gibi her yanı mükemmel iletken kaplı yapılarla ilgileniliyorsa FDTD hesap
uzayının altı sınır yüzeyindeki teğet elektrik alan bileşenlerini (simülasyon süresince)
sıfırlamak yeterlidir. Anten ışıma örüntüsü ya da hedef RSY davranışı hesaplanmak
isteniyorsa durum değişir. Bilgisayar kapasitesine bağlı olarak FDTD hesap uzayı sonlu
sayıda hücreden oluşur. Bu sayı birkaç bin olabileceği gibi, birkaç milyon hücre de olabilir.
Sayı ne olursa olsun her eksende bir maksimum hücre sayısı söz konusudur. Örneğin xekseninde ilk hücre bir iken son hücre Nx’tir. Benzer şekilde, y ve z-eksenlerinde ilk
hücreler (1,1) iken son hücreler Ny ve Nz’dir.
Yinelemeli FDTD
alan denklemlerine bakıldığında bir hücredeki elektrik alan
bileşenlerinin hesabında komşu manyetik alanlar ile aynı noktada bir önceki elektrik alan
değerinin kullanıldığı görülür. Benzer durum, manyetik alan bileşenlerinde de vardır. Yani
(i,j,k) hücresindeki değerler için yine (i,j,k) hücresindeki önceki zamanda hesaplanan
değerler ile komşu (i+1,j,k), (i,j+1,k), (i,j,k+1) hücrelerindeki değerler kullanılmaktadır.
Örneğin x-ekseni soldan sağa doğru bir okla gösterilsin. Bu durumda ilk hücre i=1 en
solda, son hücre i=Nx en sağda olur. İlk hücredeki bileşenler hesaplanırken komşu i=0 ve
i=2 hücrelerdeki, son hücrede hesap yapılırken i=Nx-1 ve i=Nx+1 hücrelerindeki bileşenler
kullanılır. Oysa i=0 ve i=Nx hücreleri olmadığından bu değerler sıfır gibi alınacak ve tam
17
yansıma söz konusu olacaktır. Yani, FDTD hesap uzayının sınır yüzeylerinde yinelemeli
denklemlerini (hiçbir önlem almaksızın) aynen uygulamak tam yansımalara neden
olacaktır. Bu ise alınan yapının değişmesi demektir.
2.4.4 Kararlılık (Courant) koşulu
FDTD denklemleri yinelemeli yapıda olduklarından, ilerleyen zaman adımlarında sayısal
hatalardan dolayı algoritmanın ıraksamaması gerekmektedir. Bu yüzden verilen yinelemeli
denklemlerde (∆x,∆y,∆z) konum ve ∆t zaman boyutları rastgele seçilemez. Yinelemeli
denklemlerin kararlı (sonsuza gitmeyen) sayısal çözümleri garantilemesi için bu hücre
boyutları arasında bir ilişki sağlanmalıdır.
Courant koşulunun fiziksel anlamını daha iyi açıklayabilmek için, sadece zamana ve
konumda x’ e bağlı bir dalga problemini ele alalım. Bu durumda koşul,
ct x ; c
1
0 0
(2.35)
olarak verilmektedir. Eşitliğin sol tarafı “hız x zaman” yani dalganın aldığı yolu verir. Işık
hızı dalganın yayılabileceği en yüksek hız olduğu için alınan yol maksimumdur. Sağ
tarafta ise hücre boyutu vardır. O halde FDTD yinelemeli denklemlerinin kararlı olabilmesi
için, seçilen zaman adımında dalganın maksimum ilerlemesi hücre boyutunu aşmamalıdır.
Başka bir deyişle, dalga hareketinin bir zaman adımında hücre içinde kalabilmesi için
zaman adımı buna göre yeterince küçük seçilmelidir. Üç boyutlu FDTD için Courant
kararlılık koşulu ise;
ct 2
1
1
1
2 2
2
x
y
z
olarak verilmektedir.
(2.36)
18
2.5 Sayısal Dispersiyon (Dağılım)
Elektromanyetik problemlerde dağılma (dispersiyon), belli bir ortamda iletilen geniş bantlı
bir işaretin, içerdiği farklı frekanslı bileşenlerinin (faz hızlarının farklı olmasından ötürü)
gözlenen bir noktaya farklı zamanlarda ulaşmaları nedeniyle bozulmasıdır. FDTD
yönteminde, hücre içindeki elektromanyetik dalgaların faz hızları boşluktaki c ışık
hızından farklı değerler almaktadır. Bu farklılık frekansa, hücre boyutuna ve dalga ilerleme
yönüne bağımlı olarak dağılmaya neden olmaktadır. Ancak burada sözü edilen dağılma
FDTD yönteminde ayrık değerlerde hesap yapmaktan dolayı oluşan sayısal dağılmadır.
FDTD yönteminde sayısal dağılmayı gidermenin fiziksel anlamı, simüle edilen işaret
içinde en küçük dalga boyuna (en yüksek frekans) sahip bileşenin konumda kaç hücre ile
örnekleneceğinin belirlenmesidir. Bu durum Nyquist örnekleme teoremine benzetilebilir.
Nyquist teoremine göre, bir işaretin bilgi kaybı olmadan tekrar elde edilebilmesi için
zamanda örnekleme hızının işaretin içerdiği en yüksek frekansın iki katı olması gereklidir.
Benzer şekilde, FDTD yönteminde de sayısal dağılma minimum dalga boylu işaretin kaç
konum adımı ile örnekleneceğine bağlıdır.
İki boyutlu TM (Transverse Magnetic) tipi problemde kayıpsız ortamda Maxwell
denklemleri;
H x
1 E z
t
y
H y
t
(2.37)
1 E z
x
(2.38)
E z 1 H y H x
t
x
y
(2.39)
şeklindedir.
TM modu için çözümler,
Ez
n
i, j
~
~
* exp j k ix k jy nt
~
~
* exp j k ix k jy nt
~
~
E z0 * exp j k x ix k y jy nt
(2.40)
Hx
n
i, j
H x0
Hy
n
i, j
H y0
x
y
(2.41)
x
y
(2.42)
19
şeklinde monokromatik olarak ilerleyen düzlemsel dalgalar olarak kabul edilir ve FDTD
yöntemine göre ayrıklaştırılan denklemlerde yerine koyulup gerekli düzenlemeler
yapılırsa,
2
2
~
~
2
k y y
k x x
1
1
1
t
sin
x sin 2 y sin 2
ct
2
(2.43)
eşitliği elde edilir ve TM modu için FDTD algoritmasına ait iki boyutlu sayısal dağılma
bağıntısı adını alır. Benzer yaklaşımla üç boyutlu FDTD için sayısal dağılma bağıntısı,
2
2
2
~
~
~
2
k y y
k x x
k z z
1
1
1
1
t
sin
x sin 2 y sin 2 z sin 2
ct
2
(2.44)
şeklinde bulunmaktadır. Bir düzlem dalga için üç boyutlu kayıpsız ortamdaki analitik
dağılma bağıntısı ise ( k sayısal dalga vektörü),
2
c
2
kx k y kz
2
2
2
(2.45)
olarak verilmektedir. Bu denklemlerde ∆t , ∆x , ∆y ve ∆z sıfıra doğru yaklaştıkça bu
bağıntılar birbirine denk hale gelmektedir. Buna göre, eğer zamanda ve konumda FDTD
örneklemesi uygun boyutlarda yapılırsa, sayısal dağılma etkisi istenilen seviyelere
indirilebilir.
2.6 Sınır Koşulları
FDTD yönteminde ele alınan elektromanyetik problemler yapıları açısından iki başlık
altında toplanabilir:
Kapalı bölgeler (örneğin; rezonatörler, dalga kılavuzları, vb.)
Açık bölgeler (örneğin; anten vb.)
Kapalı bölgelerde FDTD’nin uygulanabilirliği açısından herhangi bir sorun yoktur. Kapalı
bölgenin sınırları ile FDTD hacminin sınırları çakıştırılarak sorun giderilebilmektedir.
20
Örneğin, dalga kılavuzu FDTD ile modellenecek ise, teğet elektrik alan bileşenleri duvarlar
üzerinde sıfırdır ve bu durumda ayrıca sınır koşulu tanımına gerek yoktur.
Birçok uygulamada, serbest uzay içerisinde yer alan yapılar modellenir ve alanların sınırsız
uzayda yayılması veya saçılması istenir. FDTD uzayının sınırlandırılması gerekir. Saçılan
ve yayılan alanlar sınıra ulaştıkları zaman önlem alınmadığı takdirde problem uzayına geri
yansıyabilirler.
FDTD problem uzayının sınırı, saçılan ya da yayılan alanlar sınıra ulaştıklarında yutulacak
şekilde seçilir, böylece sınırsız uzayda yayılıyormuş gibi benzetim yapmak mümkün
olabilir. Bu tip problemler için dış sınırdan yansımadan önce zaman ilerleyişini durdurmak
da diğer bir yöntemdir. Ancak çoğu problem için uygun bir alternatif değildir.
Sonlu farklar metodunda bir uzay-zaman kafesi oluşturulur ve Maxwell denklemleri, sonlu
fark denklemleri sistemi ile kafes üzerine yerleştirilir. Ancak bu yolla alan problemlerinin
çözümü denendiğinde saçılma problemi gibi bir sorunla karşılaşılır. Yani alanın içinde
bulunduğu düzlem sınırsız olmasına karşın bilgisayarda sınırlı bölgenin analizi
yapılabileceğinden yapı sınırlanır. Bunun için sınırlı boyutta kafes kullanılır fakat engeli
kapsayacak kadar geniş bir kafes olmalıdır ve doğruya yakın bir sonuç elde edebilmek için
kafesin dış yüzeyinden gelen alanı yutacak şekilde sınır koşulları kullanılmalıdır. Bu tip
sınır koşullarına açık sınır koşulları adı verilir.
2.6.1 Tek yönlü dalga denklemleri
Bilgisayar hafızasının sınırlı olmasından dolayı belli bir noktada kesilen FDTD uzayında
istenmeyen yansımalar oluşabilir. Bu yansımaları önlemek için FDTD uzayının sınırlarında
hesap yapılmaz. Bu sınır noktalarındaki alan değerleri iç noktalarda hesaplanan değerler
cinsinden belli bir denkleme uyacak şekilde yazılır. Bu denklemin uygun seçilmesi
yansımaların önlenmesi açısından çok önemlidir. Seçilecek denklem, geriye yansımaları
tamamen yok edecek ya da en aza indirecek şekilde olmalıdır. Genelde yapılan; dalga
denklemlerini ileri ve geri giden bileşenlere ayırıp, geri giden kısmı sıfırlamaktır.
Kartezyen koordinatlarda ABC ihtiyaçlarına uygun bir tek yönlü dalga denklemi teorisi
geliştirilmiştir. Bu teoride kısmi türev operatörleri çarpanlara ayrılır. Bunun için öncelikle
21
kartezyen koordinatlarda iki boyutlu bir dalga denklemi göz önüne alınmaktadır [2]. U
skaler bir alan bileşenini, c ise dalganın faz hızını göstermek üzere iki boyutlu dalga
denklemi;
2U
x
2
2U
y
2
1 2U
0
c2 t 2
(2.46)
şeklinde verilebilir. Burada kısmi türev operatörü
L
2
x
2
2
y
2
1 2
1
2
2
2
D x D y 2 Dt
2
2
c t
c
(2.47)
şeklinde tanımlanabilir. Bu durumda dalga denklemi
LU 0
(2.48)
şeklinde yazılmaktadır. L dalga operatörü
LU L LU 0
(2.49)
şeklinde çarpanlara ayrılabilir. Burada
L Dx
S
Dt
1 S 2
c
Dy
Dt / c
L Dx
Dt
1 S 2
c
(2.50)
(2.51)
(2.52)
olarak tanımlanmaktadır. L (-x) yönünde, L (+x) yönünde ilerleyen operatörlerdir.
x = 0 sınırında U dalga fonksiyonuna
LU 0
(2.53)
22
şeklinde L uygulandığında sınıra doğru herhangi bir α açısıyla gelen bir düzlem dalga
yutulur. Benzer şekilde x = xmax sınırındaki düzlem dalga için L operatörü aynı sonucu
vermektedir.
L ve L zaman ve konum değişkenlerine göre diferansiyel operatörleri içermektedir.
Aynı
zamanda
bu
ifadelerde
karekök
olabilmektedir.
Bu
haliyle
operatörler
sayısallaştırılamazlar. Kareköklü ifade L ve L ’yı hem konum hem de zaman
değişkenleri içinde yerel olmayan sözde diferansiyel operatörler haline getirdiği için, ABC
olarak kullanılan denklemin doğrudan doğruya sayısal hale getirilmesi engellenmektedir.
Kareköklü ifade normal kısmi diferansiyellerden oluşan bir seriye yaklaştırılarak bu sorun
çözümlenebilir ve ifade FDTD uygulamalarında sayısallaştırılabilecek hale getirilebilir.
Verilen L ve L operatörleri çok küçük S değerleri için
1 S 2 1
(2.54)
şeklinde tek terimli Taylor serisi açınımı ile kullanılabilir. S değerinin çok küçük olması,
ilerleyen dalganın; zamana göre türevinin ışık hızına bölünmesi sonucunda elde edilen
değerden, y- eksenine göre olan türevinin çok daha küçük olması anlamına gelmektedir.
Bu durumda;
L Dx
Dt
c
(2.55)
elde edilmektedir. Bu durumda x = 0 sınırı üzerinde sayısal olarak uygulanabilecek olan
birinci-derece ABC eşitliği;
U 1 U
0
x
c t
(2.56)
olarak bulunur. Benzer şekilde (2.50) eşitliğindeki kareköklü ifade Taylor serisine açılır ve
ilk iki terim alınırsa daha büyük S değeri için uygun olan
23
1
1 S 2 1 S 2
2
(2.57)
ifadesi elde edilir. Bu ifade (2.50) eşitliğinde kullanıldığında
L Dx
Dt
1 2
1 S
c
2
D
L Dx t
c
2
2
1 1 c.D y D Dt cD y
x
2 Dt
c
2 Dt
(2.58)
(2.59)
elde edilebilir. x=0 için ikinci dereceden ABC ifadesi ise şu şekilde olur.
2U 1 2U c 2U
0
xt c t 2
2 y2
(2.60)
Aynı ifade:
x = xmax sınırında
2U 1 2U c 2U
0
xt c t 2 2 y 2
(2.61)
y = 0 sınırında
2U 1 2U c 2U
0
yt c t 2
2 x2
(2.62)
y = ymax sınırında
2U 1 2U c 2U
0
yt c t 2
2 x2
olarak elde edilir.
(2.63)
24
2.6.2 Mur tipi sınır koşulları
Tek yönlü dalga denklemlerinde oluşturulan ABC (Absorbing Boundary Conditions)
denklemleri Mur tarafından FDTD algoritmasına uygun hale getirilmiştir. Üç boyutlu
uzayda x = 0 sınırındaki açık sınır koşulları için sonlu fark denklemlerinin çıkarılmasında
öncelikle Yee birim hücresinde aşağıdaki özellikler göz önünde bulundurulmalıdır:
Her hücre, üç koordinatta da o eksene dik iki yüzeyle sınırlıdır ve bu yüzeyler (i,j,k)
noktalarından geçmektedir.
E elektrik alan bileşenleri bu yüzeylere teğet, H manyetik alan bileşenleri ise dik
doğrultudadır.
FDTD iterasyonları neticesinde bir sonraki hücreye ait alan bileşenleri hesaplanabilir.
Ancak bu bağıntıda sınırın dışarısında yer alan manyetik alan bileşenlerine ihtiyaç
duyulmasından ötürü sınır üzerindeki teğet elektrik alan bileşenlerinin değerleri bu şekilde
elde edilemez. Bu yüzden açık bölge sınır koşullarının, sadece yüzeye teğet elektrik alan
bileşenleri için elde edilmesi yeterlidir.
2 boyutlu FDTD uzayında x = 0 sınırı için 1. derece Mur tipi ABC E z için çıkarılacak
olursa;
Ez
n 1
0, j E z n 1, j
c0 t
n
n
E z 1, j E z 0, j
c0 t
(2.64)
elde edilir.
2. dereceden Mur ABC ise;
Ez
n 1
0, j E z n 1 1, j
c 0 t
n 1
n 1
. E z 1, j E z 0, j
c 0 t
2
n
n
. E z 0, j E z 1, j
c 0 t
c0 t 2 E z n 0, j 1 2 E z n 0, j E z n 0, j 1
.
2c 0 t E z n 1, j 1 2 E z n 1, j E z n 1, j 1
olarak bulunmaktadır. Bu denklemlerde x y olarak kabul edilmiştir.
(2.65)
25
2.6.3 Mükemmel uyumlandırılmış plaka (perfectly matched layer, PML)
FDTD kullanılarak simüle edilen alan boyutlarını sınırlandırmamız gereklidir. Maxwell
denklemleri için en esnek ve en etkili emici sınır şartlarından biri Berenger tarafından
geliştirilen mükemmel uyumlandırılmış tabakadır. Böylece hesaplamaların daha kolay
yapılması sağlanmaktadır. Bu yöntemde, bir A ortamında yayılan elektromanyetik
dalganın farklı bir B ortamı ile karşılaşması durumunda, yansıma miktarı ortamların
dielektrik sabitlerine ve manyetik geçirgenlik sabitlerine bağlı olarak değişir [13].
A B
A B
c0
(2.66)
(2.67)
1
(2.68)
0 0
Darbenin sınıra çarpmadan sönümlenmesi istenmektedir. Bu ve değerlerinin
kompleks yapılması ile sağlanır, çünkü sanal kısım gecikmeye neden olan kısımdır.
DZ
1
t
0 0
H y H x
y
x
D z r E z
*
H x
1
t
0 0
H y
t
E z
y
E z
0 0 x
1
(2.70)
(2.71)
(2.72)
Fourier bölgesine geçilerek (
H y H x
jD z c 0
y
x
D z r E z
*
(2.69)
j );
t
(2.73)
(2.74)
26
E
jH x c 0 z
y
E
jH y c 0 z
x
(2.75)
(2.76)
elde edilir.
Normalize edilmiş birimler için denklem (2.73) ve (2.75) ve (2.76)’deki türev
ifadelerindeki ve ihmal edilmektedir. Bu ifadelerin yerine gerçel olmayan dielektrik
sabiti ve manyetik geçirgenlik sabiti kullanılmaktadır ( FZ * , FX * , FY * ).
jD z FZ x FZ
*
*
H y
y c0
x
H x
y
D z r E z
*
jH x FX
*
(2.77)
(2.78)
E z
y
x F * y c0
X
E
*
*
jH y FY x FY y c 0 z
x
(2.79)
(2.80)
Dikkat edilmesi gereken birkaç önemli nokta vardır. İlk olarak, F değeri akı yoğunluğu
D ile ilişkili ama E ile ilişkili değildir. İkinci olarak denklem (2.80), (2.79)’deki F ve
denklem (2.77)’daki F ’nin her bir değerine biri x yönünde diğeri y yönünde iki değer
ilave edilir. Bir PML’nin iki temel şartı vardır.
Ortamın gerisinden PML’ye giden empedans sabit olmalıdır.
0 m
F
*
F
*
X
1
(2.81)
X
Sınıra dikey doğrultuda (örneğin x yönünde), bağıl dielektrik sabiti ve bağıl manyetik
geçirgenlik sabiti bu yönün tersinde olan diğer yönlerde aşağıdaki eşitlikleri
sağlamalıdır.
27
F
*
X
1
F
(2.82)
*
Y
F
*
X
1
F
(2.83)
*
Y
Burada bu sabitlerin her biri kompleks yapıda kabul edilmektedir.
F
*
m
D
Fm
m
j 0
F * F
m
m
D
m
j 0
m=x veya y için
(2.84)
m=x veya y için
(2.85)
Denklem (2.82) ve (2.83)’deki parametrelerin aşağıdaki gibi seçilmesi yeterli olmaktadır.
F F 1
m
D
m
0
(2.86)
m
H
m
0
D
0
(2.87)
değeri arttırılırsa denklem (2.73), (2.75) ve (2.76)’daki D Z ve H Y değerleri azalır. İlk
önce x yönünde bir PML ele alınırsa
0 m
F
F
1 x / j 0
1
1 x / j 0
*
X
*
X
(2.88)
elde edilir. Böylece, (2.77), (2.78), (2.79) ve (2.80) ’deki denklemlerde F * ve F * ’nin
sadece x’e bağlı değerleri ele alınmalıdır.
H y H x
*
jD z FZ x c 0
y
x
jH x FX
*
E z
y
x c0
E
*
jH y FY x c 0 z
x
(2.89)
(2.90)
(2.91)
28
Buradan (2.86) ve (2.87)’deki denklem değerleri kullanılarak aşağıdaki denklemler elde
edilir.
D x
j 1
j 0
H y H x
Dz c0
y
x
Dx
j 1
j 0
E
H x c 0 z
y
Dx
j 1
j 0
E
H y c 0 z
x
1
(2.92)
(2.93)
(2.94)
(2.92), (2.93) ve (2.94)’de verilen denklemlere FDTD uyguladığında,
Dx
j 1
j 0
D z jD z D x D z
0
D z D i
D
Dz z
t
0
n 1 / 2
(2.95)
i, j D z n1 / 2 i, j
t
D i D z n 1 / 2 i, j D z n 1 / 2
0
2
.t
D z D i
n 1 / 2
i, j 1 1 D i
Dz Dz
t
0
t
2 0
t
n 1 / 2
i, j 1 1 D i
Dz
t
2 0
(2.96)
(2.97)
eşitliği elde edilir. Bu eşitliği (2.92)’de yerine yazılırsa
i, j gi3i D z n 1 / 2 i, j
H y n i 1 / 2, j H y n i 1 / 2, j
gi2i 0.5
H x n i, j 1 / 2 H x n i, j 1 / 2
(2.98)
x / 2c 0
t
1
c0
c0
x
x
2
(2.99)
Dz
n 1 / 2
bulunur. gi2i ve gi3i parametreleri ise
29
gi2i
1
1 D i t / 2 0
(2.100)
gi3i
1 D i t / 2 0
1 D i t / 2 0
(2.101)
ifadeleri ile verilir. (2.94) ifadesi
Hy
n 1
i 1 / 2, j
fi3i 1 / 2H y i 1 / 2, j
n
fi2(i 1 / 2)(0.5) E z
n 1 / 2
i 1, j E z n1 / 2 i, j
(2.102)
şeklinde düzenlenebilir. Burada,
fi 2i 1 / 2
1
1 D i 1 / 2t / 2 0
(2.103)
fi3i 1 / 2
1 D i 1 / 2t / 2 0
1 D i 1 / 2t / 2 0
(2.104)
şeklindedir. H y ’nin FDTD ızgarasındaki konumundan dolayı fi2 ve fi3 parametreleri
i+1/2’de hesaplanır. Denklem (2.93) ifadesi yeniden düzenlenerek aşağıdaki biçimde
yazılabilir.
E
( x) 1 E z
jH x c 0 z D
0 j y
y
(2.105)
Mesafeye bağlı türev ifadesi
E z E z
y
n 1 / 2
i, j 1 E z n1 / 2 i, j
x
curl _ e
x
(2.106)
olarak yeniden yazılabilir. Bu FDTD ile
Hx
n 1
i, j 1 / 2 H x
t
n
curl _ e
i, j 1 / 2
x
c 0
T
D ( x) .t curl _ e
0
x
n 0
(2.107)
30
olarak ifadesi elde
edilir. Toplam simgesinin önündeki ekstra t zaman bölgesinde
integral yaklaşımının bir parçasıdır. Sonuç olarak,
Hx
n 1
i, j 1 / 2 H x n i, j 1 / 2
c t D x t
n 1 / 2
i, j 1 / 2
0
I HX
x
0
c 0 t
.curl _ e
x
H x i, j 1 / 2
n
D x t
IH
2 0
n 1 / 2
X
(2.108)
c 0 t
curl _ e
x
i, j 1 / 2
ifadesini elde ederiz. (2.93) denkleminden aşağıdaki denklemler türetilirse,
curl _ e E z
n 1 / 2
i, j E z n1 / 2 i, j 1
i, j 1 / 2 I H
(2.109)
i, j 1 / 2 curl _ e
(2.110)
i, j 1 / 2 H x n i, j 1 / 2 0.5curl _ e
n 1 / 2
i, j 1 / 2
fi1i I H
(2.111)
I HX
Hx
n 1 / 2
n 1 / 2
X
n 1
X
bulunur. Burada,
fi1i
i t
2 0
(2.112)
olarak verilmektedir. f ve g parametrelerinin hesabında iletkenlik değişimine gerek
yoktur. Diğer bir parametre ise
xn
t
2 0
(2.113)
şeklindedir ve bu PML içinde ilerledikçe artar. f ve g parametreleri
i
xni 0.33 *
pml _ boyu
fi1i xni
3
i=1, 2, ….., pml_boyu
(2.114)
(2.115)
31
1
gi2i
1 xni
(2.116)
1 xni
gi3i
1 xni
(2.117)
olarak hesaplanır. Denklem (2.114) ifadesindeki parantez içerisinin değeri 0 ile 1 arasında
değişir. 0,333 sayısı ampirik olarak hesaplanır ve bu sayı kararlı kalan en büyük sayıdır.
Yukarıdaki parametrelerin değişim aralıkları aşağıda verilmiştir.
fi1i
0’dan 0,333’e
(2.117)
gi2i
1’den 0,75’e
(2.118)
gi3i
1’den 0,5’e
(2.119)
Ana problem uzayı boyunca gi2 ve gi3 değerleri 1 iken fi1 değeri 0’dır. Bu nedenle
programın ana parçasından PML’ye bir geçiş vardır.
Buraya kadar x yönündeki değerler hesaplanmıştır. Benzer şekilde y yönü içinde analizler
yapılmalıdır.
Dx
j 1
j 0
1 D Y
j 0
Dx
j 1
j 0
Dx
j 1
j 0
.1 D Y
j 0
1
H y H x
Dz c0
y
x
D Y
1
j 0
E
H x c 0 z
y
1
E
H y c 0 z
x
(2.120)
(2.121)
(2.122)
Yukarıdaki denklemlere x yönünde FDTD yöntemi uygulandığında,
i, j gi3i gj3 j D z n 1 / 2 i, j
H y n i 1 / 2, j H y n i 1 / 2, j
gi2i gj 2 j 0.5
H x n i, j 1 / 2 H x n i, j 1 / 2
Dz
n 1 / 2
bulunur. y yönündeki H y ifadesi ise,
(2.123)
32
curl _ e E z
I HY
n 1 / 2
n 1 / 2
i 1, j E z n1 / 2 i, j
i 1 / 2, j I H
n 1 / 2
Y
i 1 / 2, j curl _ e
i 1 / 2, j fi3i 1 / 2H y n i, j 1 / 2
n 1 / 2
i, j 1 / 2
fj 2 j 1 / 20.5curl _ e fi1i I H
Hy
(2.124)
(2.125)
n 1
(2.126)
X
olarak bulunur. PML ile ilgili parametrelerin alabilecekleri değer aralıkları aşağıda
verilmiştir.
fi1i , fj1 j
0’dan 0,333’e
(2.127)
fi2i , gi2i , fj 2 j , gj2 j
1’den 0,75’e
(2.128)
fi3i , gi3i , fj3 j , gj3 j
1’den 0,5’e
(2.129)
fi1i ve fj1 j ’nin değerleri 0’a diğer parametrelerin değerleri 1’e ayarlandığında
problem uzayının ana parçasında PML kolaylıkla kapatılabilmektedir.
33
3. ELEKTROMANYETİKTE PLAZMA ORTAMI
Plazma konusunda yapılan çalışmalar ilk olarak, 1920’li yıllarda Tonks, Amerikalı kimyacı
ve fizikçi olan Irving Langmuir ve arkadaşları tarafından yapılmıştır. İlk deneyler gaz
deşarjları
konusunda
yapılmıştır.
Yüksek
akım
taşıyabilen
vakum
tüplerinin
oluşturulmasına duyulan ihtiyaçtan dolayı yapılan çalışmalarda ekranlama (shielding) olayı
keşfedilmiştir. Daha sonra 1930’lu yıllarda kontrollü nükleer füzyon çalışmalarının
başlamasıyla plazma çalışmaları hız kazanmıştır. Maddenin dördüncü hali olarak da
bilinen plazma, en genel tanımla iyonize olmuş gazdır. Gaz fazındaki maddenin çok
yüksek sıcaklıklara ısıtılmasıyla atomlar iyonlaşarak, elektron ve pozitif iyonlar
oluştururlar. Ancak atomlar tamamıyla iyonize olmamakta ve bir kısmı nötr kalmaya
devam edebilmektedir. Oluşan bu parçacık bulutu plazma olarak adlandırılır. Plazma,
soğuk ve sıcak plazma olarak isimlendirilebilmektedir. Soğuk plazmalarda, gaz fazındaki
atomların sadece %1-10 kısmı iyonize olmakta geri kalan kısmı ise nötr kalmaya devam
etmektedir. Sıcak plazmalarda gaz tamamen iyonize olmaktadır ancak her iyonize gaz
plazma değildir. İyonize gazın plazma olarak adlandırılabilmesi için bazı kriterleri
sağlaması gerekmektedir [14].
3.1 Plazma Kriterleri
Plazma elektriksel olarak nötr olmasına rağmen çok iyi bir iletkendir; elektrik alan ve
manyetik alanla etkileşebilir. Elektrik ve manyetik alanlar plazma içerisindeki
parçacıkların yörüngelerini kontrol ederler. Yüklü parçacıkların hareketleri parçacık
demetleri, dolayısıyla da manyetik alan oluşturan akım veya elektrik alan yaratabilirler.
İyonize gazın plazma olarak tanımlanabilmesi için, plazmanın elektrostatik özelliklerini
belirleyen, uzunluk ölçüsü anlamına gelen, Debye uzunluğu, Debye hacmi içerisinde yer
alan parçacık sayısı ve plazma çarpışma frekansının sağlaması gereken koşullar vardır.
Birinci koşul Debye uzunluğu ile plazma boyutu, ikinci koşul Debye hacmi ile parçacık
yoğunluğu, üçüncü koşul ise çarpışma frekansı ile yüklü parçacıklar ve nötr atomların
çarpışmaları arasında geçen ortalama zaman arasındaki bağıntılardan oluşmaktadır.
k .T .
D B e 2 0
ne .e
1
2
D L
(3.1)
34
Burada; D Debye uzunluğu, k B Boltzman sabiti, Te elektron sıcaklığı, 0 boşluğun
geçirgenliği,
n
yoğunluk,
ne
elektron
yoğunluğu,
e
ise
elektronun
yükünü
göstermektedir. Debye uzunluğu, plazma içerisinde yüklü bir parçacık tarafından diğer bir
yüklü parçacığın elektrik alanının etkisinin hissedildiği mesafeyi verir. İyonlaşmış bir
gazın plazma olarak adlandırılabilmesi için plazma boyutunun ( L ), Debye uzunluğundan
çok büyük olması gerekmektedir. Plazma karakteristiği için önemli olan bir kavram,
plazma ortamında elektron yoğunluğu ( ne ) ve iyon yoğunluğunun ( ni ) hemen hemen
birbirine eşit
olması
anlamına gelen, plazmanın
yaklaşık
olarak nötr kalma
(quasineutrality) durumudur. Plazma bölgesinin çevresinde plazma kılıfı (plasma sheath)
olarak adlandırılan ve plazmayı temas ettiği tüm yüzeylerden ayıran bir bölge meydana
gelmektedir. Bu bölgede pozitif yük yoğunluğu elektron yoğunluğundan fazladır.
4
3
N D .n. . D
3
N D 1
(3.2)
Debye küresi olarak bilinen hacim içerisinde bulunan parçacık sayısı N D birden çok
büyük olmalıdır.
. 1
(3.3)
Yüklü parçacıklar ile nötr atomlar arasındaki ortalama çarpışma süresi ile plazma
salınım frekansının çarpımı, birden büyük olmalıdır. Yoğunluk ( n ) ve sıcaklık ( k T ) plazma
için iki önemli parametredir. Evrende farklı yoğunluk ve sıcaklıklara sahip olan birçok
plazma çeşidi vardır. Plazmaların bir kısmı laboratuvar ortamında oluşturulur; ancak
yıldızlar ve uzay plazmaları gibi doğal plazmalar da vardır. En önemli plazma güneştir.
3.2 İzotropik Plazma ve İletken Dağılımı
Dielektrik ortamda, rezonans frekansı 1 (3.5)’deki denklemde 0(sıfır) değildir ve küçük
frekanslarda 0 ’a yaklaşır ve bundan dolayı r sabit bir değer alır. Fakat iletkende,
moleküllere bağlı olmayan elektronlar vardır ve bundan dolayı geri kuvveti m 0 2 r
denklem (3.6)’da sıfır olur. Ayrıca moleküller arasında etkileşim göz ardı edilebilir ve iki
farklı ortamdaki elektrik alan eşitlenebilir.
35
d2 r
dr
2
m. 2 m.0 r m.v.
F
dt
dt
r 1
(3.4)
2
Ne
2
m. 0 . 1 2 jv
(3.5)
Manyetize plazma ortamının dielektrik geçirgenlik sabiti [15],
1
*
P 2
. j.vC
(3.6)
ile verilir. Burada
P 2. . f P
(3.7)
vC elektron çarpışma frekansı
f P plazma frekansı
olarak tanımlanmaktadır. Her iki ortamın dielektrik geçirgenlik sabiti eşitse (aynı ortamda),
p2
1 j
1
. 0
. j.vC
(3.8)
bulunur. (3.8) denklemi çözülürse,
p
0 v C j
2
(3.9)
eşitliği elde edilir. Düşük frekanslarda v , bundan dolayı sabittir ama genelde
frekansa bağlı olarak değişir.
(3.6) denklemini açılırsa,
* 1
P 2 / vC P 2 / vC
j
vC j
bulunur. (3.10) denkleminin Z transformu alındığında,
(3.10)
36
*
P / vC
1 P / vC
1
t 1 z
1 e vC .t .z 1
2
2
(3.11)
Dz * z .Ez .t
(3.12)
elde edilir. (3.11) denklemi (3.12) denkleminde yerine konularak,
D z E z
P 2 .t
.
1
1
. E z
1
vC t 1
1 e
z
1 z
vC
(3.13)
ve denklemin paydaları eşitlenerek,
1 e vC t .z 1
P 2 .t
. E z
D z E z
.
vC .t
vC .t 2
1
1
1
e
.
z
e
z
vC
(3.14)
bulunur. Yukarıdaki denklemde yeni bir terim olarak S z tanımlanırsa,
S z
1 e vC t .z 1
P 2 .t
. E z
.
vC .t
vC .t 2
1
.z e
.z
vC
1 1 e
(3.15)
Ez Dz z 1.S z
(3.16)
bulunur. S z denklemi (3.16)’da yerine konup S z çekilirse,
S z 1 e vC .t .z 1.S z e vC .t .z 2 .S z
P 2 .t
vC
1 e
vC .t
.Ez
(3.17)
elde edilir. (3.16) ve (3.17) denklemlerine FDTD yöntemi uygulandığında,
e X k d X k s X k
s X k 1 exp vC .t .sxm1k exp vC .t .sxm2k
(3.18)
powomega,2.0* t / vC * 1 exp vC .t e X k
(3.19)
sxm2k sxm1k
(3.20)
sxm1k sxk
(3.21)
bulunur. Plazma ortamı yüksek frekanslı ortam olduğundan dolayı FDTD hücre boyunun
alındığından daha küçük seçilmesi gerekir. EM plazma frekansı 4000 THz aldığımızda,
37
c 3 *108
75 *109 m
15
f 4 *10
(3.22)
olur. Hücre boyu, dalga boyunun en az on’da biri alındığında kararlı olur. Düşük
frekanslarda plazma ortamı bir metal gibi gelen EM dalgayı yansıtır, yüksek frekanslarda
ise EM dalga plazma ortamından geçer.
38
39
4. KAYNAK PARAMETRELERİN SEÇİMİ
FDTD ile elektromanyetik problem simülasyonunda önemli unsurlardan birisi de
parametre seçimidir. FDTD ile zamanda darbesel işaretlerin simüle edilmesindeki ana
amaç ele alınan yapının geniş frekans bandında davranışını incelemektir. FDTD ile her
yapı her frekans bölgesinde incelenebilir. Bu nedenle FDTD ile bir yapı simüle edilmek
istenildiğinde çıkış noktası parametrelerin belirlenmesi olmaktadır. FDTD’de parametre
seçimi aynı zamanda bir çeşit optimizasyon anlamına da gelir [1]. Parametre seçiminin iki
önemli ayağı vardır. Bunlar;
İstenen frekans analizi ve ayrık Fourier tekniğinin gerekleri,
FDTD parametrelerinin istenen frekans analizi doğrultusunda belirlenmesi olarak
sıralanabilir. Bu iki unsur birlikte ele alındığında parametre optimizasyonu doğal
olarak yapılmış olur.
FDTD hesap uzayına yerleştirilen yapı ne olursa olsun, genelde zamanda darbesel bir işaret
uygulanır. Bu işaret, bir gerilim ya da akım kaynağı olabileceği gibi, saçılma
problemlerinde olduğu gibi bir düzlem dalga da olabilir. Kaynak tipi ve konumda değişimi
ne olursa olsun zaman değişimi Gauss fonksiyonu benzeri bir davranış gösterir. Şekil
4.1’de 3dB darbe süresi 2 ns olan bir Gauss darbesi ve frekans bandı yan yana çizilmiştir.
Şekil 4.1’den görüleceği gibi, Gauss darbesi alçak frekansları da (DC bileşeni) içeren
frekans bandına sahiptir. Çok alçak frekanslardan istenen en yüksek frekansa kadar
analizlerde Gauss kullanmak elverişlidir. Oysa saçılan alan problemlerinde ya da dalga
kılavuzlarında DC bileşen zaten söz konusu olmadığından Gauss fonksiyonu yerine Gauss
fonksiyonun birinci hatta üst mertebe türevleri kullanılabilir. Türev mertebesi arttıkça
Gauss fonksiyonun alçak frekansları atılmaktadır. Ancak problem ne olursa olsun kaynak
olarak Gauss darbesi uygulanabilir. Eğer yapıda DC bileşeni ya da alçak frekanslar
desteklenmiyorsa, zaten uyarma hücresinden birkaç hücre ötede bu bileşenler sönecek ve
Gauss darbesi yerine Gauss fonksiyonun birinci türevi gibi işaret iletilecektir. Buna darbe
kopması denir.
40
1
1
f(t) 0.5
Genlik 0.5
0
-3
0
-2
-1
0
1
Zaman(nsn)
2
3
-2
-1
0
Frekans(GHz)
1
2
Şekil 4.1 Gauss darbesinin normalize zaman ve frekans davranışı.
(Darbe zamanda daraldıkça frekans bandı genişler)
FDTD ile fiziksel bir problemin simülasyonunda diğer önemli bir nokta da frekans
analizidir. FDTD ile alan ya da devre parametrelerinin zaman bölgesinde davranışları elde
edilir. Simülasyon bitiminde ise frekans analizi ayrık Fourier dönüşümleri ile
gerçekleştirilir. Bu işlemde önemli bir sorun işaretin uygun örneklenmesidir. Şekil 4.2’de
işaretin uygun örneklenmesi ya da örneklenmemesi durumunda neler olabileceği şematik
olarak gösterilmiştir:
İşaret Spekt rumu
Frekans
Yetersiz Örneklenmiş İşaret Spekt rumu
Frekans
Yeterli Örneklenmiş İşaret Spekt rumu
Frekans
Şekil 4.2 Sınırlı banda sahip bir işaretin örnekleme sıklığı ile ilişkisi
Sınırlı banda sahip zaman işareti örneklendiğinde (yani ayrıklaştırıldığında) işaretin bandı
frekans bölgesinde periyodikleşir. Bu durumda bandların iç içe geçmesi bilgi kaybı
demektir. Bunu önlemenin yolu uygun örneklemeden geçer. Uygun örnekleme, işaret
41
işleme tekniğinde bilinen Nyquist örnekleme teoreminden başka bir şey değildir. Yani
işaretten zamanda alınan ayrık örneklerin sıklığı, işaretin içerdiği en yüksek frekansın iki
katı hızda olmalıdır. FDTD yönteminde parametrelerin saptanması şu aşamalarda yapılır:
Önce uygulanacak kaynak, örneğin Gauss darbesi seçilir. Kaynak darbe süresi analiz
yapılacak en yüksek frekansa göre ayarlanır
Gauss darbesi ve darbe süresi seçildikten sonra, ikinci adım zamanda ve konumda
ayrıklaştırmaktır.
Gauss darbesinin frekans bandındaki en büyük frekans bileşeni, Nyquist örnekleme
teoremi gereği zamanda ayrıklaştırmayı belirler. Bu, ayrık Fourier dönüşümü için
geçerlidir.
Yani, istenen en yüksek frekans bileşeni fmax ise işarette bilgi kaybı olmaması için
zaman adımı ∆tFFT=1/(2fmax) olmalıdır. Bu en üst sınırdır.
FDTD tekniğinin uygulanmasında ise konumda hücre boyutları ∆x, ∆y ve ∆z ile
zaman adımı ∆t(FDTD) yine ilgilenilen en yüksek frekanstan (fmax) başlayarak
belirlenilir.
FDTD açısından iki sınırlama söz konusudur. Birincisi sayısal dağılma, ikincisi
kararlılık kriteridir. Yukarıda kısaca sözü edilen bu iki nokta hem FDTD simülasyonu
hem de simülasyon sonrası ayrık Fourier analizi açısından önemlidir.
Ele alınan zaman işareti içerisinde en yüksek frekanslı (fmax) yani en küçük dalga
boylu (λmin) bileşen en az birkaç hücre ile örneklenebilmelidir. Yani FDTD hücre
boyutları işaretin en küçük dalga boyuna sahip bileşeninden bile birkaç misli küçük
olmalıdır.
Uygulamada,
λmin/100
ile
λmin/4
arasında
hücre
boyutlarına
rastlanmaktadır. Genelde λmin/10-λmin/20 arasındaki değerler uygun seçimlerdir.
Bu şekilde hücre boyutları seçildikten sonra kararlılık kriteri gereği zaman adımı,
∆t(FDTD) belirlenir.
42
Genelde simülasyon sonrası frekans analizi için gerekli ∆tFFT değeri simülasyon adımı
∆t(FDTD) değerinden çok daha küçüktür ve FDTD zaman adımını belirlemek bu
koşulu otomatik olarak sağlar.
Ancak simülasyon süresinin belirlenmesi frekans analizi açısından önemlidir. Zaman
bölgesinde FDTD simülasyonunu ne kadar süreceği sorusunun iki açıdan yanıtlanması
gerekir. Birincisi simülasyon sonrası frekans analizidir. Frekans analizinde hangi
frekans çözünürlüğü (∆f) ile sonuçlar istenmektedir. İstenen ∆f çözünürlüğü işaretin
zaman bölgesinde hangi sürede yani (Tmax) gözleneceğini belirler. Bu ikisi birbiri ile
ters orantılıdır. Yani, ∆f=1/Tmax olduğundan, ne kadar hassas frekans ayrımı
isteniyorsa o kadar uzun süre işaret gözlenmelidir, simülasyon sürdürülmelidir.
Tmax
ve
∆t(FDTD)
belirlendikten
sonra
simülasyon
adımı
N(FDTD)
=
Tmax/∆t(FDTD) olarak seçilir.
Simülasyon adımı N(FDTD)=NSTOP, istenen frekans çözünürlüğünden belirlenen
minimum zaman adımıdır. Ele alınan yapıda işaretin gözlenen zaman davranışı daha
kısa sürede bitiyorsa FDTD simülasyonunu kesip işaretin öncesine ve/veya sonrasına
sıfır eklenerek gerekli Tmax sağlanır.
Tersine Tmax süresi işaretin zaman davranışının sona ermesine yetmiyorsa,
simülasyon, zaman davranışı sona erinceye dek sürdürülür. Örneğin rezonatör gibi
çınlamaya neden olan yapıların incelenmesinde FDTD simülasyonunda işaret zamanda
çok yavaş söndüğünden uzun süreler gerekir. Uygulamada bazen simülasyon belli bir
süre sonra kesilip, işaret işleme teknikleri ile sonraki anlarda yapının davranışını
kestirmek yoluna gidilir.
Parametrelerin bu şekilde seçimi hem FDTD için gerekli kararlılık ve sayısal dağılma
koşullarını hem de simülasyon sonrası frekans analizinin istenildiği gibi yapılabilmesini
sağlayacaktır.
43
4.1 FDTD Algoritması
FDTD algoritması, işleyiş açısından oldukça basittir. Ana döngü zaman döngüsüdür.
Seçilen maksimum zaman adımı tamamlanıncaya kadar ana zaman döngüsü çalıştırılır.
Ana FDTD algoritması önce ilgili yapıyı yerleştirir, gerekli parametrelerin hesabını yapar
ve sonra zaman döngüsünü başlatır. Zaman adımları N=1’den N=Nstop’a kadar ana FDTD
döngüsü tekrarlanır. Burada Nstop maksimum zaman adımıdır. Probleme göre birkaç yüz
adım olabileceği gibi, onbinlerce de olabilir. Özellikle rezonansa gelen yapılarda zaman
davranışı çok yavaş söneceğinden büyük Nstop değerleri gerekebilir.
Ana FDTD döngüsü t=0 anında başlar. Önce elektrik alan bileşenleri bütün hücrelerde
hesaplanır.
Bitiminde,
sınırlarda
ABS
elektrik
alan
bileşenleri
kullanılarak
gerçekleştiğinden, ABS için her sınır yüzeydeki teğet elektrik alan bileşenleri kullanılır.
Örneğin; Xmin ve Xmax sınır yüzeylerinde elektrik alanının y ve z bileşenleri (Ey ve Ez)
kullanılır.
FDTD uzayı içerisindeki bütün hücrelerde elektrik alanlar hesaplanır, sınır yüzeylerde
ABS gerçekleştikten sonra manyetik alanların hesabına geçilir. Ancak, elektrik ve
manyetik alanların hesaplandıkları anlar birbirinden ∆t/2 kadar farklıdır. Sonra üç
manyetik alan alt programı çağrılır. Bunların bitiminde tekrar zaman ∆t/2 kadar arttırılır.
Böylece simülasyon yinelemeli olarak sürdürülür. Yani, bir elektrik alanlar bir manyetik
alanlar hesaplanarak işleme devam edilir. Arada sınır yüzeylerde ABS gerçekleşir.
Başla
Yapı ve
Parametreler
Elektrik Alanlar
Sınır Koşulları
FDTD Döngüsü
Hayır
Dur
Çıkış
Evet
t=Tmax
t=t+ t/2
t=t+ t/2
Şekil 4.3 Ana FDTD döngüsü ve yinelemeli adımları
Manyetik
Alanlar
44
4.2 İki Boyutlu FDTD Uygulaması
Yukarıda açıklanan teorik bilgilerden sonra 2 boyutlu modelleme işlemine geçilmiştir. TE
ve TM dalga denklemleri programlama diline dönüştürülmüştür. İki boyutlu modelleme
işleminde ilk önce hava ortamında daha sonra farklı iki ortamda nasıl hareket ettiği
gözlenmiştir. Her programda c , , gibi değerler ortamın özelliğine göre alınmıştır.
Gerekli adımlar sırasıyla uygulanarak ve algoritma mantığı kullanılarak C++ programı ile
gerekli programlar yazılmıştır.
Elektrik Alan ve Manyetik Alan işaretlerinin z yönüne bağlı olmadığı kabul edildiğinde ve
µ, değerleri sabit olarak ele alındığında (J ≡ 0);
TE modu için;
H x H y 0, E z 0
Bz E x E y
t
y
x
(4.1)
H z E y E x
t
x
y
(4.2)
Dx H z H y
Jx
t
y
z
(4.3)
E x H z
t
y
D y
H z
Jy
z
x
t
E y
t
n 1 / 2
1
Z
1
Z
(4.5)
H z
x
1
ct
Hz
(4.4)
.t ve Z
(4.6)
376.7
(4.7)
i 1 / 2, j 1 / 2 H z n 1 / 2 i 1 / 2, j 1 / 2
n
n
E y i 1, j 1 / 2 E y i, j 1 / 2
x
n
n
E x i 1 / 2, j 1 E x i 1 / 2, j
y
(4.8)
45
Ex
Ey
n 1
i 1 / 2, j E x i 1 / 2, j Z
y
H z n 1 / 2 i 1 / 2, j 1 / 2
n 1 / 2
i 1 / 2, j 1 / 2
H z
(4.9)
i, j 1 / 2 E y i, j 1 / 2 Z
x
H z n 1 / 2 i 1 / 2, j 1 / 2
n 1 / 2
i 1 / 2, j 1 / 2
H z
(4.10)
n
n 1
n
eşitlikleri elde edilir.
TM modu için;
E x E y 0, H z 0
Dz H y H x
Jz
t
x
y
(4.11)
E z H y H x
t
x
y
(4.12)
H x
E
z
t
y
(4.13)
H y
Ez
t
n 1
E z
x
(4.14)
i, j E x n i, j Z H y n 1 / 2 i 1 / 2, j H y n1 / 2 i 1 / 2, j
x
(4.15)
n 1 / 2
i, j 1 / 2 H x n1 / 2 i, j 1 / 2
Z
Hx
y
Hx
Hy
n
n
E z i, j 1 E z i, j
Z y
n 1 / 2
i, j 1 / 2 H x n 1 / 2 i, j 1 / 2 1
n 1 / 2
i 1 / 2, j H y n1 / 2 i 1 / 2, j 1
eşitlikleri elde edilir.
(4.16)
n
n
E z i 1, j E z i, j
Z x
(4.17)
46
47
5. SİMÜLASYON SONUÇLARI
Bu tezde FDTD yöntemi kullanılarak iki boyutlu bir nesnenin herhangi bir noktasında
oluşturulan dalganın zaman adımına göre nasıl yayıldığı gözlenmiştir. Simülasyon
sonuçlarında sadece TM durumu incelenmiştir. İlk başta sadece hava ortamında yayılan
dalga için sonuçlar elde edilmiştir. Daha sonra hem PML hem de Mur tipi sınır koşulları
kullanılarak belli sınırlar içerisinde dalganın nasıl yayıldığı gözlenmiştir. Son olarak iki
farklı ortam kullanılmıştır. Hem hava ortamı hem de plazma ortamı aynı anda bir hücrede
kullanılarak ve sınır koşulları da hücreye dahil edilerek dalganın nasıl yayıldığı
incelenmiştir. Plazma ortamının dışında oluşturulan dalganın hangi frekanslarda plazma
ortamına çarparak geri yansıdığı, hangi frekanslarda plazma ortamından geçip tekrar hava
ortamına geçtiği simülasyon sonuçlarında gözlenmiştir.
5.1 İki Boyutlu TM Dalgasının Simülasyonu
60x60 boyutundaki hücrede elektrik ve manyetik alan oluşturularak bu alanın tam
ortasında Gauss darbesiyle bir dalga üretilmiş ve yayılması incelenmiştir. Ortam hava
olduğundan 8,85 *1012 olarak alınmıştır. Şekil (5.1)’de onuncu adımda, Şekil (5.2)’de
otuzuncu adımda ve Şekil (5.3)’de ise ellinci adımda elektromanyetik dalganın hareketi
gözlenmiştir. Bu üç şekilde de herhangi bir emici sınır koşulu kullanılmamıştır.
0.2
Ez
0.15
0.1
0.05
0
60
60
40
40
20
x-->cm
20
0
0
Şekil 5.1 Elektromanyetik dalganın adım adım ilerlemesi
y-->cm
48
Şekil (5.1)’de onuncu zaman adımında Gauss darbesinin (30,30) noktasında hava
ortamında oluşumu görülmektedir.
0.2
Ez
0.1
0
-0.1
-0.2
60
60
40
40
20
20
0
x-->cm
0
y-->cm
Şekil 5.2 Elektromanyetik dalganın adım adım ilerlemesi
Şekil (5.2)’de otuzuncu zaman adımında Gauss darbesinin kenarlara doğru genişleyerek
yayıldığı ve E Z değerinin azaldığı görülmektedir.
0.06
0.04
Ez
0.02
0
-0.02
-0.04
60
60
40
40
20
x-->cm
20
0
0
y-->cm
Şekil 5.3 Elektromanyetik dalganın adım adım ilerlemesi
49
Şekil (5.3)’de ellinci zaman adımında Gauss darbesinin Şekil (5.2)’ye göre daha fazla
kenarlara doğru genişleyerek yayıldığı ve E Z değerinin daha da fazla azaldığı
görülmektedir.
5.2 İki Boyutlu TM Dalgasının PML Uygulanmış Hali İle Simülasyonu
60x60 boyutundaki hücrede elektrik ve manyetik alan oluşturularak bu alanın tam
ortasında Gauss darbesiyle bir dalga üretilmiş ve yayılması incelenmiştir. Ortam hava
olduğundan 8,85 *1012 olarak alınmıştır. Sınır koşulu olarak PML uygulanması ile
Şekil (5.4)’de kırkıncı adımda, Şekil (5.5)’de yüzüncü adımda ve Şekil (5.6)’da bininci
adımda dalganın hareketi gözlenmiştir.
0.2
0.1
Ez
0
-0.1
-0.2
-0.3
60
60
40
40
20
x--->cm
20
0
0
y--->cm
Şekil 5.4 PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.4)’de kırkıncı zaman adımında Gauss darbesinin (30,30) noktasında hava
ortamında oluşumu görülmektedir.
50
0.3
Ez
0.2
0.1
0
-0.1
60
60
40
40
20
20
0
x--->cm
0
y--->cm
Şekil 5.5 PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.5)’de yüzüncü zaman adımında Gauss darbesinin hava ortamında Şekil (5.4)’e
göre daha fazla sınırlara doğru genişleyerek yayıldığı gözlenmektedir.
0.1
Ez
0
-0.1
-0.2
-0.3
60
60
40
40
20
x--->cm
20
0
0
y--->cm
Şekil 5.6 PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.6)’da bininci zaman adımında Gauss darbesinin hava ortamında Şekil (5.5)’e göre
çok daha fazla sınırlara doğru genişleyerek yaklaştığı ve PML’den dolayı sınıra çarpan
dalganın sönümlendiği gözlenmektedir. Bu noktada dalganın geri yansımaması
istenmektedir. Çünkü geri yansımaların hesaplanabileceği bir yöntem yoktur.
51
5.3 İki Boyutlu TM Dalgasının İki Farklı Ortamda İken PML Uygulanmış Hali İle
Simülasyonu
80x80 boyutlu hücrede sinüs ve Gauss darbelerinin çarpımıyla oluşturulan dalga Şekil
(5.7)’de gösterildiği gibi x yönünde 0’dan 40’a kadar serbest uzayda, 40’dan 50’ye kadar
plazma ortamında ve 50’den 80’e kadar tekrar serbest uzayda yayılmakta olup PML
uygulanması durumunda elde edilen dalga şekilleri incelenmiştir. Darbenin frekansı Şekil
(5.8), Şekil (5.9) ve Şekil (5.10) için f=500THz seçildiğinde dalga plazma ortamına
geldiğinde tamamen geri yansımaktadır. Darbenin frekansı Şekil (5.11), Şekil (5.12) ve
Şekil (5.13)’de olduğu gibi f=4000THz seçildiğinde dalga plazma ortamından geçip belli
bir adım sayısından sonra PML’den dolayı sönümlenmektedir.
PLAZMA ORTAMI
Şekil 5.7 Plazma ortamının oluşturulduğu x yönündeki konumları
52
0.01
0.008
Ez
0.006
0.004
0.002
0
80
60
80
60
40
40
20
20
0
x--->cm
0
y--->cm
Şekil 5.8 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.8)’de ellinci zaman adımında sinüs ve Gauss darbelerinin çarpımıyla oluşturulan
kaynağın (20,20) noktasında oluşumu gözlenmektedir. Sınır koşulu olarak PML
kullanılmıştır. Sinüs darbesinin frekansı 500 THz’dir.
0.02
0
Ez
-0.02
-0.04
-0.06
-0.08
80
60
80
60
40
40
20
x--->cm
20
0
0
y--->cm
Şekil 5.9 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.9)’da yüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla oluşturulan
dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamına çarpıp geri
53
yansımaktadır. Sınır koşulu olarak PML kullanılmıştır. Sinüs darbesinin frekansı 500
THz’dir.
0.04
Ez
0.02
0
-0.02
-0.04
80
60
80
60
40
40
20
20
0
x--->cm
0
y--->cm
Şekil 5.10 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
0.2
Ez
0
-0.2
-0.4
-0.6
80
60
80
60
40
40
20
x--->cm
20
0
0
y--->cm
Şekil 5.11 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
Şekil (5.10)’da üçyüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamına çarpmakta,
geri yansıyan dalga PML’den dolayı sönümlenmektedir. Sinüs darbesinin frekansı 500
54
THz’dir. Şekil (5.11)’de ellinci zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan kaynağın (20,20) noktasında oluşumu gözlenmektedir. Sınır koşulu olarak
PML kullanılmıştır. Sinüs darbesinin frekansı 4000 THz’dir.
0.1
0.05
Ez
0
-0.05
-0.1
80
60
80
60
40
40
20
20
0
x--->cm
0
y--->cm
Şekil 5.12 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
-4
x 10
4
Ez
2
0
-2
-4
80
60
80
60
40
40
20
x--->cm
20
0
0
y--->cm
Şekil 5.13 İki farklı ortamda PML uygulanmış elektromanyetik dalganın ilerlemesi
55
Şekil (5.12)’de yüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamından
geçmektedir. Şekil (5.11)’de çıkan sonuca göre dalga daha fazla genişleyip, E Z değeri
azalmaktadır. Sınır koşulu olarak PML kullanılmıştır. Sinüs darbesinin frekansı 4000
THz’dir.
Şekil (5.13)’de üçyüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamından
geçmektedir. PML’den dolayı dalga sönümlenmektedir. Sinüs darbesinin frekansı 4000
THz’dir.
5.4 İki Boyutlu TM Dalgasının İki Farklı Ortamda Mur Tipi ABC Uygulanmış Hali
İle Simülasyonu
100x100 boyutlu hücrede sinüs ve Gauss darbelerinin çarpımıyla oluşturulan dalga Şekil
5.14’de gösterildiği gibi x yönünde 0’dan 50’ye kadar serbest uzayda, 50’den 60’a kadar
plazma ortamında ve 60’dan 100’e kadar tekrar serbest uzayda yayılmakta olup Mur tipi
ABC uygulanması durumunda elde edilen dalga şekilleri incelenmiştir. Darbenin frekansı
Şekil (5.15), Şekil (5.16) ve Şekil (5.17)’de olduğu gibi f=500THz seçildiğinde dalga
plazma ortamına geldiğinde tamamen geri yansımaktadır. Darbenin frekansı Şekil (5.18),
Şekil (5.19) ve Şekil (5.20)’de olduğu gibi f=4000THz seçildiğinde dalga plazma
ortamından geçip belli bir adım sayısından sonra dalga sönümlenmektedir.
PLAZMA ORTAMI
Şekil 5.14 Plazma ortamının oluşturulduğu x yönündeki konumları
56
0.01
0.008
Ez
0.006
0.004
0.002
0
100
100
80
50
60
40
x-->cm
0
20
0
y-->cm
Şekil 5.15 50 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.15)’de ellinci zaman adımında sinüs ve Gauss darbelerinin çarpımıyla oluşturulan
kaynağın (20,20) noktasında oluşumu gözlenmektedir. Sınır koşulu olarak Mur tipi ABC
kullanılmıştır. Sinüs darbesinin frekansı 500 THz’dir.
0.02
0
Ez
-0.02
-0.04
-0.06
-0.08
100
100
80
50
60
40
x-->cm
0
20
0
y-->cm
Şekil 5.16 100 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.16)’da yüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamına çarpıp geri
57
yansımaktadır. Sınır koşulu olarak Mur tipi ABC kullanılmıştır. Sinüs darbesinin frekansı
500 THz’dir.
0.02
Ez
0
-0.02
-0.04
-0.06
100
100
80
50
60
40
x-->cm
0
20
0
y-->cm
Şekil 5.17 300 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.17)’de üçyüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamına çarpıp geri
yansımaktadır. Bu dalga Mur tipi ABC’den dolayı sönümlenmektedir. Sinüs darbesinin
frekansı 500 THz’dir.
58
0.2
Ez
0
-0.2
-0.4
-0.6
100
100
80
50
60
40
0
x-->cm
20
0
y-->cm
Şekil 5.18 50 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.18)’de ellinci zaman adımında sinüs ve Gauss darbelerinin çarpımıyla oluşturulan
kaynağın (20,20) noktasında oluşumu gözlenmektedir. Sınır koşulu olarak Mur tipi ABC
kullanılmıştır. Sinüs darbesinin frekansı 4000 THz’dir.
0.1
Ez
0.05
0
-0.05
-0.1
100
100
80
50
60
40
x-->cm
0
20
0
y-->cm
Şekil 5.19 100 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.19)’da yüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamından
geçmektedir. Şekil (5.18)’de çıkan sonuca göre dalga daha fazla genişleyip, E Z değeri
59
azalmaktadır. Sınır koşulu olarak Mur tipi ABC kullanılmıştır. Sinüs darbesinin frekansı
4000 THz’dir.
0.05
Ez
0
-0.05
100
100
80
50
60
40
x-->cm
0
20
0
y-->cm
Şekil 5.20 300 zaman adımı sırasında elektromanyetik dalganın durumu
Şekil (5.20)’de üç yüzüncü zaman adımında sinüs ve Gauss darbelerinin çarpımıyla
oluşturulan dalga, x yönünde kırk ile elli arasında oluşturulan plazma ortamından
geçmektedir. Mur tipi ABC’den dolayı dalga sönümlenmektedir. Sinüs darbesinin frekansı
4000 THz’dir.
PML emici sınır koşulu kullanıldığında Mur tipi emici sınır koşuluna göre daha doğru
sonuçlar elde edilebildiği görülmüştür. Ayrıca, plazma ortamına gelen dalganın düşük
frekanslarda geri yansıdığı, yüksek frekanslarda ise plazma ortamından geçtiği
gözlenmiştir.
60
61
6. SONUÇ VE ÖNERİLER
FDTD yöntemi doğrudan zaman bölgesinde Maxwell denklemlerinin ayrıklaştırılmasına
dayanır. Bu nedenle hem sinüzoidal kaynak uyarımı ile hem de darbesel kaynak uyarımı ile
analizleri yapılabilmektedir. Darbesel kaynak kullanılarak elde edilen geçici durum
davranışından Fourier dönüşümü yardımıyla nesnelerin geniş bantlı frekans davranışları
kolaylıkla elde edilebilmektedir. FDTD yöntemi kullanılarak farklı boyutlardaki nesneler
üzerinde yayılan elektromanyetik dalganın nasıl yayıldığı kolaylıkla gözlemlenebilir.
FDTD yöntemi, hücre boyutları küçüldükçe gerçeğe yakın değerler verdiğinden dolayı
güvenilir bir yöntemdir.
Tezin ikinci bölümünde, FDTD yöntemi ile ilgili literatür incelenmiş olup, Maxwell
denklemlerinin FDTD yöntemine uygun şekilleri kullanılmıştır. FDTD yönteminden,
FDTD yönteminin avantajlarından ve dezavantajlarından bahsedilmiştir. Maxwell
denklemlerinin Yee hücresine nasıl yerleştirildiği gösterilmiştir. FDTD denklemleri
yinelemeli yapıda olduklarından, ilerleyen zaman adımlarında sayısal hata olmaması için
uygun ( x , y , z , t ) değerleri seçilmiştir.
Bir başka önemli konu sınır koşullarıdır. Sınır koşulları kullanılarak daha gerçeğe yakın
değerler bulunabilmektedir. Bu tezde, iki sınır koşulu incelenmiştir. Bunlardan biri PML,
diğeri ise Mur tipi sınır koşuludur. Açık sınır koşullarının birbirine göre farkları
incelenmiş, hangi sınır koşulunun sınıra gelen dalgayı daha iyi yuttuğu araştırılmıştır. Bu
konuda PML yönteminin daha iyi sonuç verdiği gözlenmiştir.
Tezin üçüncü bölümünde, plazma ortamı incelenmiş olup, hava ortamında oluşturulan
dalganın hangi frekanslarda plazma ortamından geçip, hangi frekanslarda plazma
ortamından geri yansıdığı gözlemlenmiştir.
Son olarak, C++ ve MATLAB programları kullanılarak plazma ortamının dalga yayılması
üzerindeki etkisi incelenmiştir. Daha sonraki çalışmalarda üç boyutlu plazma ortamları
FDTD yöntemi kullanılarak incelenebilir.
62
63
KAYNAKLAR
1. Sevgi, L. (1999). Elektromagnetik Problemler
İstanbul/Türkiye: Birsen Yayınevi, 7-8, 9-17, 24-29.
ve
Sayısal
Yöntemler.(1).
2. Taflove, A. and Hagness, S. C. (2005). Computational Electrodynamics: The Finite
Difference Time Domain.(3). Norwood/United States of America: Artech House, 3-4,
236-242.
3. Kunz, K. S. and Luebbers, R. J. (1993). The Finite Difference Time Domain Method for
Electromagnetics.(1). Florida/United States of America: CRC Press, 1-2.
4. Yee, K. S. (1966). Numerical Solution of Initial Boundary Value Problems Involving
Maxwell’s Equations in Isotropic Media. IEEE Transactions Antennas propagation,
14(3), 302-307.
5. Taflove, A. and Brodwin, M. E. (1975). Numerical Solution of Steady-State
Electromagnetic Scattering Problems Using the Time-Dependent Maxwell’s Equations.
IEEE Transactions Microwave Theory and Techniques, 23(8), 623-630.
6. Taflove, A. (1980). Application of the Finite-Difference Time-Domain Method the
Sinusoidal Steady-State Electromagnetic Penetration Problems. IEEE Transactions
Electromagnetic Compatibility, 22(3), 191-202.
7. Mur, G. (1981). Absorbing Boundary Conditions for the Finite-Difference
Approximation of the Time-Domain Electromagnetic Field Equations. IEEE
Transactions Electromagnetic Compatibility, 23(4), 377-382.
8. Umashankar, K. R. and Taflove, A. (1982). A Novel Method to Analyze
Electromagnetic Scattering of Complex Objects. IEEE Transactions Electromagnetic
Compatibility, 24(4), 397-405.
9. Berenger, J. P. (1994). A Perfectly Matched Layer for the Absorption of
Electromagnetic Waves. Journal of Computational Physics, 114(2), 185-200.
10. Balanis, C. A. (2012). Advanced Engineering Electromagnetics.(2). New Jersey/United
States of America: Wiley, 1-5.
11. Inan, U. S. and Marshall, R. A. (2011). Numerical Electromagnetics the FDTD
Method.(1). Cambridge/United States of America: Cambridge, 1-2.
12. Elsherbeni, A. and Demir, V. (2008). The Finite-Difference Time-Domain Method for
Electromagnetics with Matlab Simulations.(1). New Jersey/United States of America:
Scitech, 1-2.
13. Sullivan, D. M. (2013). Electromagnetic Simulation Using the FDTD Method.(2). New
Jersey/United States of America: Wiley, 56-64.
14. Akgün, Y. (2010). Düşük enerjili plazma odak füzyon cihazı yapımı ve nötronik
ölçümler, Doktora Tezi, Ankara Üniversitesi Fen Bilimleri Enstitüsü, Ankara, 3-7.
64
15. Ishimaru, A. (1991). Electromagnetic Wave Propagation, Radiation and Scattering.(1).
New Jersey/ United States of America: Prentice Hall, 209-210.
65
ÖZGEÇMİŞ
Kişisel Bilgiler
Soyadı, adı
: AVCI, Selçuk Alparslan
Uyruğu
: T.C.
Doğum tarihi ve : 07/04/1984 Karabük
yeri
Medeni hali
: Bekar
Telefon
: 0 (312) 582 33 16
Faks
: 0 (312) 202 37 10
e-posta
: [email protected]
Eğitim Derecesi
Okul/Program
Mezuniyet Yılı
Yüksek lisans
Gazi Üniversitesi/Elektrik-Elektronik
2014
Mühendisliği
Lisans
Kırıkkale Üniversitesi/ Elektrik-Elektronik
2007
Mühendisliği
Lise
Mustafa Kemal Lisesi
2001
İş Deneyimi, Yıl
Çalıştığı Yer
Görev
2011-devam
Gazi Üniversitesi
Araştırma
Görevlisi
ediyor
2010-2011
Karabük Üniversitesi
Araştırma
Görevlisi
Yabancı Dili
İngilizce
Yayınlar
-
Hobiler
Futbol, Basketbol, Yüzme, Sinema