ENDÜSTRİYEL ELEKTRONİK DEVRELERİ
Elektronik belki de en çok endüstride kullanılmaktadır. Bu yüzden endüstriyel elektronik adı altında bir
elektronik dalı oluşmuştur. Endüstriyel elektronik devreleri; endüstride insan kontrolünden daha hassas ve
hızlı denetim gerektiren, insan için tehlikeli olabilecek yerleri kontrol eden ve bazı işlevler yapılması
gereken yerlerde sıkça kullanılırlar. Bu örnekleri çoğaltmak mümkündür.
Endüstriyel elektronik devrelerine örnek verecek olursak; motor kontrol devreleri, ısı kontrol devreleri, ışık
kontrol devreleri gibi genel adıyla kontrol devreleri, inverterler, konverterler (dönüştürücüler), sanayide
kullanılan robotların elektronik bölümleri, ölçü aletleri...
Kısacası aklımıza gelebilecek birçok elektronik devre bir yönüyle endüstriyel elektronik alanına
girebilecek durumdadır. Bir endüstriyel elektronik devresi ele alalım. Bu çok basit bir devreden çok
karmaşık bir devreye kadar birçok devre olabilir. Burada olayın izahının kolaylığı açısından basit bir devre
ele alacağım. Kontrol devreleri bir sistemi kontrol etmeye yarar. O sistem kompleks bir yapıya sahip
olabileceği gibi (birçok çıktısı ve girdisi olan bir sistem), basit bir eleman da olabilir (bir ampul, bir elektrik
motoru...)
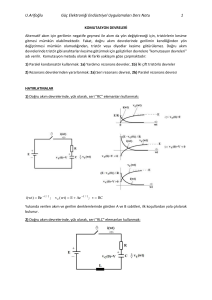
Genel olarak kontrol iki şekilde kontrol işlemini yapar. 1- Sistemin çıktılarına göre girdilerini kontrol eder.
(Kapalı çevrim kontrol sistemi) BR>Örnek: Bir buhar kazanı... 2- Sistemin çıktılarına bakmadan girdilerini
kontrol eder (Açık çevrim kontrol sistemi)
Kapalı çevrim kontrol sisteminde, kontrol edilecek sistemin çıkışlarından örnekler alınır, bu örnekler bir
referans bilgi ile kıyaslanır ve giriş bilgisi buna göre değiştirilir veya aynı kalır. Açık çevrim kontrol
sisteminde ise giriş çıkıştan bağımsız olarak değiştirilir.
Bu sistem çıkış bilgisinin önemsiz olduğu veya çıkış bilgisinin örneğini almanın zor olduğu durumlarda
uygulanır. Mesela fırınlarda bir kekin pişip pişmediğini algılayacak bir sensör henüz bulunamamıştır. Her
kontrol sisteminde mutlaka en az bir tane kontrol elamanı kullanılır.
Bu eleman kontrol edilecek sisteme göre değişir. Bir su akışı kontrol edilecekse su valfi, hava akışı kontrol
edilecekse hava valfi, elektrik makinesi kontrol edilecekse elektronik elemanlar kullanılır. Elektronik
elemanlar genelde; düşük güçler için transistor, yüksek güçler için tristör, triyak, yüksek frekanslar için fet,
mosfet ve bunların türevleri olan gto vs. dir.
Bu bölümde triyak ile kontrol edilen bir ampul devresini inceleyeceğiz. Bu devreye piyasada kısaca
dimmer denilmektedir. Ama daha önce devrenin çalışma prensibine bir bakmak gerekir.
Dimmerin çalışma prensibi:
Dimmer bir elektrik ampulünun akımını belli zamanlarda kesip belli zamanlarda vermek suretiyle o
ampulde harcana gücü kontrol eder. Böylece ampulün parlaklığını istediğimiz gibi ayarlayabiliriz. Bu
kontrolü triyak sayesinde yaparız. Triyak belli zamanlarda aktif belli zamanlarda pasif yapılır. Bu zaman
aralıkları değiştirilerek ampulde harcana güç kontrol altında tutulabilir. İleride verilecek örnek devrede bu
işlemin nasıl yapıldığı açıklanacaktır.
MOTOR KONTROL DEVRELERİ
AC ve DC'de çalışan motorların elektronik hız kontrolü büyük avantajlar sağlar. Örneğin; elektrikli
matkabın devir sayısının kontrolü ile çeşitli ortamlardaki çeşitli malzemeler çok rahat delinebilir.
Transformatör sargı tezgahında çalışan motorun da devir sayısı bu çeşit devrelerle kontrol edilmektedir.
12 Volt ve 24 Volt'ta Çalışan DC Motorların Kontrolü:
DC akımla çalışan model trenler için geliştirilmiştir. Fakat başka DC motorlarda çalıştırılabilir. Örneğin,
modelcilerin çok kullandığı 12 volt DC gerilim ile çalışan motorlarla küçük bir sargı sarma tezgahı
yapılabilir. Burada motor hızını kontrol eden P1 ayarlayıcısına bir pedal ile kumanda edilir. Küçük
devirlerde motorun dönme momenti sabit kalmadığından devre güvenle kullanılabilir.
Bu devre ile 12volt DC motor çalıştırılacaksa besleme uçlarına 12 volt AC gerilim uygulanmalıdır. şekil -1
'deki devre model tren regülatörü olarak kullanılacaksa besleme uçlarına 24 V AC gerilim uygulanmalıdır.
Pals jeneratörü için gerekli DC besleme gerilimi , D2 diyodu ile , besleme geriliminden elde edilir. Yarım
dalga doğrultma nedeniyle pals jeneratörü sadece pozitif alternanslarda gerilim alır.
Bu nedenle negatif alternanslarda tetikleme palsları üretilmez.D2 diyodunun nabazanlı DC gerilimi D1
zeneri ile sınırlandırılır. Bununla pratik olarak puls jeneratörünün sabit ve kararlı bir besleme alması
sağlanmış olur. Aksi takdirde gerilim değişmelerinde jeneratörün pals frekansı ve bununla da tetikleme
açısıyla regülatörün çıkış gerilimi değişirdi. P1 potuyla pals frekansı bağımsız olarak ayarlanabilir. P2
trimpotu minimum devir sayısının belirlenmesini sağlar.
Potansiyometrenin her konumuna belirli bir devir sayısı karşılık gelmektedir. Bilindiği gibi pals frekansı,
UJT'nin B1 ve B2 bağlantısı arasındaki gerilim değiştirildiğinde azalıp çoğalır. Bunun için motor
uçlarındaki gerilim, bir gerilim bölücü üzerinden B1'e geri beslenir. Artan yükte motor devri düşmeye
başlar. Motorun, tristör yalıtkan iken verdiği gerilim azalır. Böylece B1 pozitif gerilim azalır.
Pals jeneratörünün çalışma frekansı artar. Tristörün ateşleme zamanı ileri alınır. Yani tristör pozitif
alternansın daha büyük bir kısmında iletken olur. Motora daha fazla güç aktarılır. Yük azaldığında ise
çalışma öncekinin tersi şeklinde gerçekleşir. Motor uçlarındaki gerilimin dolayısıyla B1 geriliminin artması,
pals jeneratörünün çalışma frekansını azaltır. Tristör daha geç tetiklenir.
Neticede regülatör, ayarlanan devir sayısına yaklaşık olarak sabit tutmayı başarır. 42 Volt'luk Şönt Sargılı
Motorun Hız Kontrolu Devreye 6 amperlik şönt sargılı doğru akım motorları takılabilir. Çünkü tristörün
anma akımı 6 amperdir. Kullanılan motorun anma gerilimi 31 V olduğu için devrenin besleme gerilimi 42 V
AC seçilmiştir. Ancak hiçbir değişiklik yapılmadan devreye 24 V'luk motorlarda bağlanabilir. Kutup sargısı
için gerekli DC gerilim bir köprü diyot ile besleme geriliminden sağlanabilir.
J-K uçlarına bağlanan bu devre şekilde gösterilmiştir. Regülasyon endüvi gerilimine göre yapılmaktadır.
Regüle ayarı ile bu gerilim 2-32 V arası ayarlanabilir. Ancak bu gerilim değerleri arasındaki yük
değişmelerinin regüle edilmesi mümkündür. Bu sınır dışında motor devir sayısı yük değişmelerinden çok
etkilenir.2 volttan düşük gerilimlerde endüvi kayıplarından dolayı gerilimin büyük bir kısmı kaybolur. 32
volttan yüksek gerilimlerde ise regüle işlemi için gerekli olan regüle payı kalmaz ve besleme gerilim
artmadıkça regülatör çıkış gerilimi 0 olur. devrede tristör diğer devrelerden farklı bir şekilde bağlanmıştır.
Bu durumda da tristör anoduna pozitif gelince tetiklenecektir. Tristörün anodu motorun endüvi uçlarına
bağlıdır. Motorun diğer ucu ise şasededir. Şasenin (+) olmasının nedeni, regülatör ve tetikleme
devrelerinin negatif çıkış verecek şekilde planlanmış olmalarıdır. osi ltör kısmı D1 üzerinden besleme
geriliminin (-) alternanslarını alır. Pozitif alternanslarda çalışmaz. Tristörün yalıtımda olduğu alternansta
tetikleme devresi de durur. Böylece tetikleme palsı üretilmez. D3 zeneri , gelen negatif alternansların
tepelerini zener gerilimi seviyesinde keser. Böylece hem transistörler kararlı bir gerilim alır, hem de
referans gerilimi , besleme gerilimi değişmelerinden etkilenmez.
Referans gerilimin elde edildiği R8, P1 ve R9 gerilim bölücü dirençleri uçlarında saf DC gerilim elde etmek
için bu devre uçlarını C2 bağlanmıştır. C2 şarjının regülatör kısmına boşalmasını engellemek için D2
konmuştur. Referans üreteci R8,R9 ve P1'den meydana gelir. R8 ile gerilimin üst sınırı , R9 ile alt sınırı
ayarlanır. P1 ile bu ayarlanan sınırlar arasında gerilim ayarı yapılabilir. P1'in orta uç gerilimi R7 üzerinden
T1'e gider.
Bu transistör bir sabit akım kaynağı olarak C4'ü şarj eder. Böylece UJT osilatör çalışır. Tristöre ateşleme
trafosu üzerinden palsler göndermeye başlar. P1 potu ile orta uç gerilimi artırılırsa T1'in kollektör akımı
artarak C4'ü daha çabuk şarj eder. Böylece UJT, tristöre birim zamanda daha çok pals gönderir. Bu da
tristörün ortalama akımını arttırır. devre ilk çalıştırıldığında motorun devri yavaş ,yavaş artarken uçlardaki
gerilim minimumdan maksimuma doğru yükselir.
Bu gerilim R3 ve R4 üzerinden T1'1in emiterine geri beslemektedir. Bu nedenle motor ilk çalışmaya
başladığında motorun ters gerilimii düşük olduğundan T1'in emiterinde az bir negatiflik vardır. Fakat motor
devri arttıkça ters gerilimde artar. T1'in emiterine gittikçe artan bir negatiflik uygulanır. Bunun sonucu T1'in
kollektör akımı dolayısıyla UJT'nin pals sayısı azalır. Sonunda devre dengeye ulaşır. Yani P ile
ayarlanmış devir sayısına ulaşılmıştır. Motorun her devir sayısı bu dengeyi bozar ve devre eski konumuna
ulaşıncaya kadar UJT'ye daha az pals üretir. Çünkü motorun devir değişimi T1'in kollektör akımını
değiştirmiştir. Motorların Hız Kontrolü kontrol devresi 220 V AC'de çalışır.
Devrenin çalışma prensibi şekil-2'de verilen devrenin aynısıdır. Devre 0.5 amperlik endüvi akımına sahip
bir motorla denendi. Fakat kullanılan tristör 1 amperlik motorları da çalıştırabilir. Bu tristörün ters tepe
gerilimi 400 V'tur. Pozitif alternansta motorun ters indükleme gerilim, şebeke geriliminin maksimum
gerilimine ilave olduğundan tristörün doyum gerilimi yeterli değildir. Bunun için tristöre D4 seri bağlanarak
sadece negatif alternansların tristöre ulaşması sağlanır.
Yalnız seçilen diyotun gerilim ve akım değerleri (600 V , 1 A) yeterince yüksek olmalıdır. Eğer daha
yüksek gerilimli tristör kullanılırsa D4 takılmayabilir. R1'in değeri 5K/10W olarak seçilmiştir.D1 diyotunun
da çalışma gerilimi de yüksek olmalıdır. R3'ün değeri ve gücüde yükseltilmiştir. (50K/1W) Regülenin geri
besleme hattına C5 konmuştur. C5 motorun kollektör parazitlerinin regülatörü etkilemesini engeller regüle
alanı1:30'dur.6-180 voltluk çıkış gerilimleri için geçerlidir.
Motor kontrol devre uygulaması dide günlük hayatta karşılaştığımız bir uygulama olan bir otomobil cam
silecek motor kontrol devresini inceleyelim. Otomobil sileceklerinin ideal de yağmur şiddetine göre yavaş
ve hızlı çalışması istenmektedir. Hatta bu sileceklerin hızının ayarlanma olanağının bulunması, kullanımı
kolaylığının yanı sıra arzu edilen büyük bir özelliktir.
Devre silecek motoru çalışma düzeni bilinen ve motor üzerindeki sıfırlayıcı kontakları çalışan tüm
otomobillerde oldukça yüksek performansla çalışır. devrede silecek motoruna 12 v DC gerilimi 2N4442
'nin tetiklenmesiyle uygulamış oluruz. RV1 ve RV2 trimpotları C1 kapasitörünün şarj zamanını
değiştirdiğinden sileceklerin hareket etmesi için geçen dead-time süresini tespit etmek için kullanılır. Yani
birinci silmeden sonra ki bekleme süresini ayarlamak içindir. 2N4442 'nin tetiklenmesini 2N6027
sağlamaktadır.
2N6027 bir UJT transistörüdür ve S1 anahtarının kapatılması ile ilk anda C1 kapasitörünün minimum şarj
gerilimi yüzünden stand off durumundadır. C1 kapasitörü şarj olduğundan 2N6027 'nin anodu katotuna
nazaran daha pozitif olacak ve stand off durumundan iletime geçerek C1 kapasitörünün küçük değerli R3
ve R4 üzerinden deşarj olmasını sağlayacaktır. Bu anda 2N4442 iletime sokulacaktır. Burada ise
otomobilin silecek motor devresindeki kontakların durumu önem kazanmaktadır.
Silecek kolunun konumu ve ilkesini bilmek çok önemlidir. Şimdi bunu anlatmak ve hata yapma olasılığını
azaltmak gereklidir. Silecek kolu ilk anda sıfır konumundadır ve motor çalışmamaktadır. Yağmur yağmaya
başlayınca silecek kolu bir konumuna alınır. Silecek kolunda bulunan kontaklardan ( b) ve(c) noktaları
kısa devre olur ve 12V bu kapalı kontaklar üzerinden motora uygulanır ve silecekler harekete başlar ve
silecek kolu konum değiştirmediği sürece cam üzerinde silme işlemine devam eder.
Yağmur şiddetini arttırdığı zaman b ve c kontak kolu -2- konumuna alınmak suretiyle kısa devre olur ve
silecek motorundaki L1 sargısı devre dışı bırakılarak sileceklerin hızı arttırılır. Yağmur hızı azaldığı zaman
kol sıfır konumuna getirilir. Bu anda silecekler yerinde olmayabilir işte bu durumda motor üzerinde
bulunan sıfırlayıcı kontaklar devreye girer . sıfırlayıcı kontak sadece silecekler yerine döndüğünde açık
devre olur. Motor bobine giden 12V açık devre olduğunda silecekler çalışmaz. Zaman devresi sadece sıfır
konumunda çalıştırılacak şekilde tasarlanmış ve bağlanmıştır. S1 anahtarı off konumunda iken silecekler
çalışmamaktadır. S1 anahtarının on konumuna alınması ile çalışma başlar. 2N4442 iletime sokulur. 12V
D1 ve 2N4442 'nin anot ve katotu üzerinden silecek motoruna uygulanır ve silecekler hareket eder.
Sıfırlayıcı kontaklar kısa devre olarak D2 üzerinden bobinin 12V irtibatlanmasını sağlar. Aynı zaman da
bu 12V 2N4442 'nin katotuna da uygulanmış olur. Devre bu şekilde çalışmasına devam eder. Endüstride
kontrol genelde anahtarlama yöntemi ile yapılmaktadır. Bunun sebebi (genelde fazla güç harcayan
devreler kontrol edildiğinden) güç kaybının önüne geçilmek istenmesidir. Bir transistörü anahtar olarak
kullanırsak transistörün iki durumda çalışması söz konusu olacaktır.
Transistörün kesim ve doyum bölgesi. Transistörü aktif bölgede kullanmayız. Çünkü transistör aktif
bölgede güç harcamaktadır. Ancak pasif ve doyumda harcadığı güç minimum dur. Bu durumları
inceleyelim.
Pasif bölge: Bu durumda transistör üzerinde maksimum gerilim bulunurken sadece sızıntı akımı akar.
Sızıntı akımını ihmal edersek;
P = Vec * Iec = Vmax* Is (Is = 0) P = 0
Doyum bölgesi: Bu durumda transistör üzerinde minimum gerilim bulunurken (saturasyon gerilimi)
maksimum akım akar.
Saturasyon gerilimini ihmal edersek;
P = Vsat * Iec = Vsat * Imax (Vsat = 0) P = 0
Aktif bölge: Bu durumda ise transistör üzerinde hem belli bir gerilim , hem de belli bir akım mevcuttur.
Harcanan
güç ise;
P = Vce * Ice kadardır.
Alçak güçlü devrelerde bu değer fazla önemsenmeyebilir. Ancak yüksek güçte bir devre kontrol
edilecekse transistörde harcanan güç KW lar mertebesine kadar çıkar. Bu ise büyük bir problemdir.
Anahtarlama yönteminde bile harcanan güç bizi rahatsız eder. İhmal ettiğimiz değerlerin yanı sıra
elemanın bölge değiştirme sırasındaki harcadığı zamanda güç kaybı olur. (kesimden doyuma - doyumdan
kesime).
GÜÇ DEVRELERİ:
Elektronikte mekanikte olduğu gibi küçük olan bir olguyla büyük olan olguyu kontrol etmek gerekmektedir.
Örneğin ATX bilgisayar kasalarında bilgisayar üzerideki her alet maximum 24V çalışmasına karşın
bilgisayar mikro işlemcisi 220V güç kaynağını bir yarıiletken ile kontrol edebilmektedir. Bu yapıda bizim
için önemli olan minimum güçle maximum güçü kayıpsız olarak hızlı ve kesin bir şekilde kontrol etmektir.
Robotic alanında ise güç devreleri özellikle lojik ibarelerden oluşan hareket ifadelerini motora anlatmak
için kullanılmaktadır. Bu işlemler için özel güç katları vede entegreler tasarlanmaktadır bunlardan bazıları
L293, L297, L297D, UMB 2003 gibi 5-30 volt arasında çalışabilen güç katlarıdır.
Ana Hatlarıya Sürücü Devreleri:
Güç devreleriyle kazanılan lojiksel kontrolü doğru ve manalı bir hareket çevirmek için devreye sürücü
devreler girmektedir. Sürem asıl anlam olarak yön verme mansaına gelmekle birlikte yapısal olarak
atılacak bir sonraki adımı belirleme işlemidir. Roboti'de motor sürücü devreleri motorun yerine ve bir
sonraki pozisyonuna geçişini belirlemektedir. Aşşağıda genel olarak bir model görülmektedir:
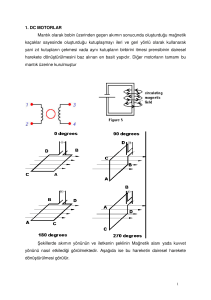
DC MOTORLAR
Doğru akım makinaları hem jenaratör hem de motor olarak çalışabildiği için temelde DC motor ve
jenaratör (genaratör) çalışma prensipleri aynıdır. Aradaki tek fark jenaratördeki E.M.K. (elektromotor
kuvvet) çıkış geriliminden büyük iken; motordaki E.M.K. çıkış geriliminden küçük olmasıdır. Böylece güç
akışı yönü değişmektedir.
Toparlarsak elektrik motoru, elektriksel enerjiyi mekanik enerjiye dönüştürerek jenaratördeki işlemin tam
tersini gerçekleştirmektedir. Bilindiği gibi jenaratörler mekanik enerjiyi elektrik enerjisine çevirmektedirler.
DC (doğru akım)'la çalışan motora bir gerilim uygulandığında pozitif fırça ve kolektör üzerinden , endüvi
sargılarından akım geçecektir. Motorun endüvi sargısı genaratörünün endüvi sargısıyla aynı yapıdadır.
Böylece N kutbu altındaki iletkenlerden akım bir yönde akarken S kutbu altındaki iletkenlerden ters yönde
bir akım akacaktır.
Endüviden akım geçmesi sonucu ana alanla etkileşen bir başka alan oluşmaktadır. Burada aranılan
sonuç endüvi sargıyı döndürebilmek için bir kuvvet oluşturmak gerektiğidir. Zıt E.M.K'nın varlığıda bu
prensip üzerine kuruludur. Zıt E.M.K. besleme gerilimine karşı koymasına rağmen uygulanan gerilimi
geçememektedir. Bu nedenle endüvi akımını sınırlamaktadır.
Endüvi akımı sadece yükü sürebilecek kadar güç üretimine katkıda bulunmaktadır. Eğer motora herhangi
bir yük bağlı değilse zıt e.m.k.. hemen hemen uygulanan gerilime eşittir. Bu durumda üretilen güç sadece
dönme kayıplarını karşılayacak kadardır. Bundan dolayı endüvi akımının üretilen zıt e.m.k tarafından
kontrol edildiği söylenebilir.
Ia =Vı-Ea / Ra Amper
Burada Vı motora uygulanan gerilim ve Ra endüvi sargısının direncidir. Endüvide indüklenen zıt emk ,
kutup akısı ve endüvinin dönüş hızına bağlıdır.
Ea= K*j *n
Burada k değeri endüvi ve kutup sargısına bağlı bir sabittir.
ÖRNEK
Bir Dc motor 230 V'luk bir kaynaktan 1680 d/d (devir/dakika) hız ile dönerken 28A akım çekmektedir.
Endüvi sargı direnci 0.25 W ise Ia=0 (yüksüz konumda/boşta) devir sayısı ne olabilir?
YANIT
Yüklü durumda Ia= 28 A iken;
Ea= Vı - Ia*Ra =223 V
Ea= K*j *n Þ 223/1680 = 0.1327 Vd/Ad Yüksüz durumdayken;(Ia=0)
Ea=Vı, Ea= K*j *n Þ 230/0.1327= 1733 d/d olarak bulunabilir.
DC MOTORLARIN SINIFLANDIRILMASI
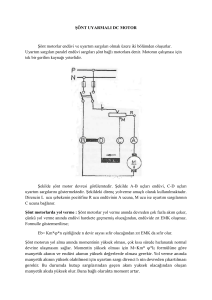
Dc motorlarda üç sınıf altında incelenebilirler; bunlar...Şönt Seri Kompund (hem seri hem paralel) olarak
isimlendirilebilir... Alan sargısı endüviye paralel bağlı ise şönt, seri bağlı ise seri olarak isimlendirilir. Seri
sargı endüvi akımını taşıyacağından kalın kesitli iletkenden, az sarımlı; şönt sargı ise ince kesitli
iletkenden çok sarımlı olarak yapılabilir.
Komput motorlarda alan sargılarının ürettiği manyetik alanlar birbirini destekleyecek yönde ise kümülatif
yada eklemeli komput, zayıflatacak yönde ise diferansiyel motor komput adını almaktadır.