8. MOMENT 2
M. Feridun Dengizek
UYGULANAN BİR MOMENTİN
BELLİ BİR EKSEN ÜZERİNDE ETKİN
KISMININ BULUNMASI
Örnek 1:
Otomobil tekerini L tipi bijon anahtarı kullanarak
değiştirmek için harcadığımız kuvvetin oluşturduğu
momentin hepsi bijonlara gitmez.
Harcanan kuvvetin, dolayısı ile momentin bir kısmı
bijonları, bir kısmı ise tekeri döndürmeye çalışır.
O noktasında bulunan vidayı sökmek için kullanılan
L şeklinde bijon anahtarı toplam momenti O- E ekseni
üzerine yönlendirmektedir. (Bkz şekil 1)
Y ekseni üzerine aktarılan moment ise toplam
momentin sadece bir kısmıdır
Mo=FXd
My= FXdy
Şekil 1
Örnek 2:
Limanlarda raylar üzerinde hareketli vinçlerin yük
kaldırırken öndeki ray ekseni üzerinden öne doğru
devrilmemesi için yükün A-A ekseninde ne kadar
moment oluşturduğu bilinmelidir ki arkaya ona göre
karşı ağırlık koyularak vincin devrilmemesi sağlanabilsin
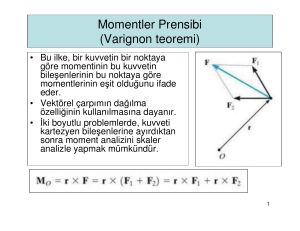
VEKTÖREL ANALİZ
Belli bir eksen etrafında etkin momentin vektörel analizi için O-E
ekseninde etkin maksimum toplam moment
i........ j........k
M o rXF rx ......ry .....rz i(ry Fz rz Fy ) j(rx Fz r z Fx ) k (rx Fy ry Fx )
Fx .....Fy .....Fz
Bu momentin istenilen eksen üzerine düşen kısmı için Ders 5 de
gördüğümüz noktasal çarpım işlemini kullanabiliriz.
Fp F * u
F 5.15
Yukarıdaki tanımlamaya göre belli bir
aksa göre moment
Ma=Mo*u
U birim faktörünü üç boyutlu
kartezyen notasyonunda yazarsak
u=ux i + uyj + uzk
Ma=(ux i + uyj + uzk)*Mo
M a (u x i u y j u z k ) * i(ry Fz rz Fy ) j(rx Fz r z Fx ) k (rx Fy ry Fx )
Yukarıdaki tanım için noktasal çarpım kuralını uygularsak
M a u x (ry Fz rz Fy ) u y (rx Fz r z Fx ) u z (rx Fy ry Fx )
M a u x (ry Fz rz Fy ) u y (rz Fx r x Fz ) u z (rx Fy ry Fx )
Yukarıdaki tanım formülün determinant formunda yazılmasına uygun
olduğundan
u x .....u y ....u z
M a rx ......ry .....rz
Fx .....Fy .....Fz
F 8.1
u x .....u y ....u z
M a rx ......ry .....rz
Fx .....Fy .....Fz
Yukarıdaki tanımda üç vektör bulunmaktadır.
Birincisi aranan momentin bulunduğu ekseni belirten birim
konum vektörü. (DİKKAT “u” nun birim vektör olduğu
unutulmamalıdır.)
İkincisi uygulanan kuvvet ile uygulamanın olduğu nokta
arasındaki konum vektörü
Üçüncüsü uygulanan kuvvet vektörü.
Verilen matrix’in determinantı istenilen eksendeki momenti
verir
Yandaki resimde a ekseni etrafında dönmeyi sağlayacak
moment Ma belirtilmiştir.
Burada r konum vektörünü belirleyen A noktası F kuvvetinin
doğrultusu üzerindeki herhangi bir nokta olabileceği gibi O
noktası da aranan moment ekseni üzerindeki herhangi bir
nokta olabilir.
Elde edilen moment negatif olursa kabul edilen u birim
vektörün ters yönde olması gerektiği ortaya çıkmış olur.
DİKKAT: Çapraz çarpım ile elde edilmiş olan vektörel değere bir başka
vektörel değer ile noktasal çarpım uygulandığında sonuç skalar bir değer
olur.
ÖRNEK PROBLEM 8.1
Yanda resmi verilen boru sisteminde A noktasından belirtilen
açılarda 500N kuvvet uygulanmaktadır.
o-x ekseni etrafında
o-Y ekseni etrafında ve
o-z ekseni etrafında oluşacak momentleri bulunuz
ÇÖZÜM 8.1
Önce F kuvvetini kartezyen koordinatlarda yazalım
Fz=F* (3/5) Fz=500*(3/5) Fz= 300N
F’=F*(4/5) F’=500*(4/5) F’= 400N
Fx=F’*(3/5) FX=400*(3/5) Fx=-240N
Fy=F’*(4/5) Fy=400*(4/5) Fy=320N
F= -240i + 320j + 300k
Sonra bir noktası dönme ekseninde, bir noktası
kuvvet doğrultusu üzerinde olan rOA konum
vektörünü yazalım
A(-2,2,3) O(0,0,0)
rOA= -2i + 2j + 3k
Son olarak dönme eksenlerini kartezyen koordinatlarda yazalım
ux=1i
uy=1j
uz=1k
u x .....u y ....u z
M a rx ......ry .....rz
Fx .....Fy .....Fz
ux=1i
uy=1j
uz=1k
rOA= -2i + 2j + 3k
F= -240i + 320j + 300k
1..........0.......0
M x 2.......2.......3
240...320...300
0..........1.......0
M y 2.......2.......3
240...320...300
0..........0........1
M z 2.......2.......3
240...320...300
Mx 1((2 * 300 (3* 320)) 0 0
Mx 360N m
M y 0 1(( 2 * 300) (3 * 240)) 0
M y 120 N m
Mz 0 0 1((2 * 320) (2 * 240))
M y 160 N m
PROBLEM
Yandaki mekanizmada A noktasındaki kolun mil
etrafında dönebilmesi için 125 N-m büyüklüğünde
tork (moment) uygulanması gerekmektedir.
B noktasına etki etmesi gereken kuvvet F minimum
ne olmalıdır.
ÇÖZÜM
MX=125 N-m
uX= 1i
F= (-F*cos60)i + (F*cos60)j + (F*cos45)k
F= (-0.5F)i+(0.5F)j+(0.707F)k
rAB= -0.15i + 0.3j +0.1k
1
M X 125 0.15
0
0
0 .3
0.1
0.5F 0.5F 0.707 F
125 1(0.3 * 0.707 F 0.1* 0.5F)
125 0.162F
F 771N m
MOMENT ÇİFTİ (Moment of a COUPLE)
Moment çifti
1. Birbirine paralel
2. Aralarında belli bir dik mesafe (d) bulunan
3. Aynı büyüklükte
4. Birbirine ters yönde etki eden
Kuvvet çiftlerinin oluşturduğu moment dir.
Bu kuvvet çiftinin toplamı sıfır olduğu için etkisi sadece
makine elemanı üzerinde elemanı belli bir yönde
döndürmeye çalışan bir moment oluşturmasıdır.
M=F*d
MOMET ÇİFTİNDE İKİ AYRI KUVVET NEDEN
TEK KUVVET GİBİ SONUÇ VERİR
Bir moment çiftininde sonuç M=F*d olduğunu
gördük
Eğer her iki kuvveti dikkate almak isteseydik
seçilen herhangi bir nokta etrafında toplam
moment alınmalıydı
MA=(F1 * 0)+ (F2 * d) MA =F2*d
Veya
MB=(F1 * d)+ (F2 * 0) MB =F1 *d
F1=F2 MA=MB=M
MOMENT ÇİFTİNİN YÖNÜ
Moment çiftinin yönüde sağ el kuralına göre belirlenir.
Parmak uçları Pozitif kuvvet yönünde ise
(saat istikametinin tersi) moment (başparmak) yukarı
doğru olur
MOMENT ÇİFTİ VEKTÖREL FORMÜLASYONU
Uzayda O noktasından uzakta birbirine paralel ve aynı
büyükükteki iki kuvvetin O noktası etrafında oluşturduğu
moment skalar bir değer olarak vektörlerin noktasal
çarpımından bulunur.
Burada r vektörünün yönünün A dan B
ye veya B den A ya olması sonucu
değiştirmeyeceği için r vektörü her iki
yön için aynıdır
M F * rAB F * rBA F * r
M F*r
Yine buradaki bir diğer önemli nokta;
O noktası nerede olursa olsun fark vektörü r aynı çıkar.
Yani Oluşan momentin dönme ekseni üzerinde herhangi bir noktaya
bağımlılığı yoktur
Dolayısıyla Moment çiftinin bir kuvvetin belli bir nokta etrafında
oluşturduğu moment den en önemli farkı moment çiftinin belli bir
konuma bağımlı olmayan serbest bir moment olmasıdır.
Ancak momentin yönü her zaman kendini oluşturan moment çitinin
bulunduğu düzleme diktir. (Örnek; x-y düzlemindeki kuvvet çiftinin
oluşturacağı moment her zaman z ekseni yönünde olur)
MOMENT ÇİFTİ BELLİ BİR KONUMA BAĞLI
OLMAYAN SERBEST BİR MOMENTDİR
Buna en iyi örnek araba direksiyonuna
uygulanan momentin tekerlere aynen
ulaşmasıdır.
Ekseni zemine açılı konumdaki direksiyondan
tekerlere giden millerde moment akarak
eksenleri zemine paralel konumdaki tekerleklere
büyüklüğü ve yönü değişmeden ulaşır
Eğer Kuvvetler ve kuvvetlerin arasındaki r
vektörel olarak yazılırsa bunların çapraz
çarpımından moment vektörel bir değer
olarak ortaya çıkar.
DİKKAT: Moment için yapılan çapraz
çarpımda önce konum (Moment kolu)
vektörü, sonra kuvvet vektörü yazılır.
EŞDEĞER MOMENT ÇİFTLERİ
Eğer iki ayrı moment çifti aynı moment
büyüklüğünü oluşturuyorsa bunlara
EŞDEĞER MOMENT denir
ÖRNEK
F1 =200N,
d1 =1 m.
M1=200*1=200N-m
F2 =200N, d2 =1 m.
M2=200*1=200N-m
M rXF
BİRDEN FAZLA MOMENT ÇİFTLERİNİN
TOPLANMASI
Bir sitemde birbirine bağlı makine elemanlarında
birden fazla moment çifti varsa, bu mometler
birbiri ile vektörel olarak toplanarak yönü ve
büyüklüğü farklı tek bir sonuç moment
oluştururlar.
Oluşan sonuç moment de serbest bir moment
olacağından yönü ve büyüklüğü aynı kalmak
şartı ile etki ettiği nokta makine elemanı
üzerinde herhangi bir nokta olabilir.
Yandaki resimde ilave ettiğim kırmızı düzlem
sonuç momentin etkili olabileceği başka bir
düzlem olabileceğini belirtmek içindir.
DİKKAT:
Vektörün bir başka vektör ile nokta
çarpımından skalar bir büyüklük
Vektörün bir başka vektör ile çapraz
çarpımından ise vektörel bir büyüklük elde
edildiğini unutmayın.
MR (rXF)
PROBLEM
Yandaki borunun O noktasında
oluşacak momenti bulunuz.
Çözüm İki şekilde yapılabilir.
CÖZÜM a
Kuvvetleri ayrı ayrı değerlendirirsek
FA 25k
rA 0i 8 j 0k
FB 25k
rB (6 * cos 30)i 8 j (6 * sin 30)k
rB 5.2i 8 j 3k
M o (rA XFA ) (rB XFB )
i
j
Mo 0 8
k
i
j
k
0 5.2 8 3
0 0 25
0
0
25
M o ((i(8 * 25) j(0 0) k (0 * 0)) ((i(8 * 25) j(5.2 * 25 0) k (0 0)
M o 200i 200i 130 j
M o 130 j
ÇÖZÜM b
Kuvvetler eşit büyüklükte ve birbirine
paralel olduğu için kuvvetler moment çifti
olarak değerlendirerek daha kolay
çözülebilir.
Moment çiftlerinden herhangi birisi
kullanılacak olursa konum vektörü diğer
kuvvete giden vektör olmalıdır
M o (rABXFB )
veya
M o (rBA XFA )
rAB rB rA
rAB (5.2i 8 j 3k ) (0i 8 j 0k )
rAB (5.2i 3k)
FB 25k
M o (rABXFB )
i
j
k
M o 5 .2 0 3
0
0
25
M o i(0 0) j(5.2 * 25 0) k (0 0)
M o 130 j
PROBLEM
Yanda görünen borular üzerinde
belirtilen momentler etki etmektedir.
Ortaya çıkacak toplam momenti
kartezyen formunda ve skalar olarak
bulunuz.
ÇÖZÜM
Momentlerin yönleri birim vektörler olarak yazılarak
momentler kartezyen formuna çevrilir
u1
2i 2 j 3.5k
22 22 3.52
0.44i 0.44 j 0.78k
M1 u1 * M1
M1 (0.44i 0.44 j 0.78k )450
M1 200i 200 j 350k
u 2 1k
M2 u2 * M2
M T M1 M 2 M 3
M 2 1k * 250 M 2 250k
MT (200i 200 j 350k) (250k) (180i 240 j)
u3
1.5i 2 j 0k
1 .5 2 ( 2 ) 2 0 2
0.6i 0.8 j
MT 20i 40 j 100k
M3 u3 * M3
M (20) 2 (40) 2 100 2
M 3 (0.6i 0.8 j) * 300 M 3 180i 240 j
M 109lb ft
PROBLEM
Resimdeki yapıda ortaya çıkacak
toplam momenti bulunuz
ÇÖZÜM
Önce moment çiftlerini ayıralım ve
etkin kuvvet ve kuvvet kollarını
kartezyen koordinatlarda yazalım
FD=(150*cos30)i - (150*sin30)j
FD = 130 i -75 j
rCD= 4i+4j
i
j
k
MC 4
4
0
130 75 0
M C i(0 0) j(0 0) k (4 * (75) (4 *130)
M C 820k
Diğer moment çiftini ele alalım
FF=(150*cos30)i - (150*sin30)j
FF = -(3/5)*200 i +(4/5)*200 j
FF=-120i+160k
rEF= 2i+2j+0k
MF
i
j
k
2
2
0
120 160 0
M E i(0 0) j(0 0) k (( 2 *160) (2 * (120)
M E 560k
MT MC M E
MT 820k 560k
MT 260lb ft
PROBLEM
Rolamit denilen yandaki mekanizmanın
dengede olabilmesi için F kuvveti ne olmalıdır.
ÇÖZÜM
Mekanizmanın dengede olabilmesi için toplam
momentlerin sıfır olması gerekir.
MR=MF+MT =0
X=25*2*cos30=43.3mm
Y= (25*2*sin30)+25+25 = 75mm
rAB=43.3i+75j
T= -15 i
F= -Fk
i
j
k
M T 43.3 75 0
15
0
0
M T i(0 0) j(0 0) k ((0) (75 * (15)
M T 1125k
i
M F 43.3
0
M R MT M F
j
k
75
0
F 0
M F i(0 0) j(0 0) k (43.3 * ( F) 0)
M F (43.3F)k
MR 1125 43.3F 0
F
1125
26 N
43.3