HACETTEPE ÜNİVERSİTESİ / MÜHENDİSLİK FAKÜLTESİ
TENSÖREL ANALİZE GİRİŞ
BİTİRME PROJESİ
Levent Özkarayel
Fizik Mühendisliği Bölümü Lisans Öğrencisi
20923525
Proje Danışmanı: Doç. Dr. Mehmet Dilaver
HAZİRAN 2015
ÖNSÖZ
Tensörel analizin giriş düzeyinde incelendiği bu çalışmada bilgisini, vaktini ve deneyimini
benimle paylaşmaktan sakınmayan değerli hocam Doç. Dr. Mehmet Dilaver’e yürekten
teşekkür ederim.
Ayrıca lisans öğrenciliğim boyunca, kendilerinden çokça şey öğrendiğim, verdikleri derslerin
tümünü heyecanla takip ettiğim ve bilimsel başarılarını örnek aldığım saygıdeğer hocalarım
Prof. Dr. Mehmet Cankurtaran’a ve Prof. Dr. Mustafa Polat’a bu çalışma vesilesiyle en içten
şükranlarımı sunarım.
Bugünlere onlarsız hiçbir şekilde gelemeyeceğimi bildiğim sevgili aileme, borcumu hiçbir
zaman ödeyemeyecek olacağımı bilsem de bu çalışmayı ithaf ederim.
Levent Özkarayel
Haziran 2015
Bitirme Projesinin İnternet Sürümüne Yapılan Güncelleme:
Levent Özkarayel, 5 Haziran 2015’te Prof. Dr. Metin Önder, Doç. Dr. Ahmet Mecit Öztaş ve
Doç. Dr. Mehmet Dilaver’den oluşan jüri karşısında bu çalışmanın sunumunu gerçekleştirmiş
ve bu tarihten yaklaşık bir hafta sonra Hacettepe Üniversitesi Fizik Mühendisliği bölümünden
“3,15” not ortalamasıyla mezun olmuştur.
i
İÇİNDEKİLER
1.GİRİŞ .......................................................................................................................... 1
2.İNDİS NOTASYONU ................................................................................................ 2
2.1. İndis Notasyonuna Giriş .................................................................................... 2
2.2. Simetrik ve Asimetrik Sistemler ....................................................................... 3
2.3. Einstein Toplama Kuralı ................................................................................... 3
2.4. Cebirsel İşlemler ................................................................................................. 4
2.4.1. Toplama ve Çıkarma ................................................................................... 4
2.4.2. Çarpma.......................................................................................................... 4
2.5. e-Permütasyon Sembolü ve Kronecker Delta .................................................. 4
2.5.1. e - δ Özdeşliği ............................................................................................... 5
2.6. Dönüşüm Denklemleri........................................................................................ 5
2.7. Türevlerin Hesaplanması ................................................................................... 6
3.TENSÖR KAVRAMI VE DÖNÜŞÜMÜ ................................................................. 8
3.1. Dual Baz Vektörleri ............................................................................................ 8
3.2. Ters (Reciprocal) Bazlar .................................................................................. 10
3.3. Koordinat Dönüşümleri ................................................................................... 13
3.4. Vektör Dönüşümü ............................................................................................ 16
3.4.1 Kontravariant Bileşenler ............................................................................ 16
3.4.2 Kovariant Bileşenler ................................................................................... 17
3.5. Yüksek Mertebeden Tensörler ........................................................................ 18
4. ÖZEL TENSÖRLER .............................................................................................. 20
4.1. Metrik Tensör ................................................................................................... 20
4.2. Konjuge Metrik Tensör ................................................................................... 23
4.3. Associated Tensör ............................................................................................. 24
4.4. Fiziksel Bileşenler ............................................................................................. 25
4.4.1. Ortogonal Koordinatlarda Fiziksel Bileşenler ........................................ 27
6. TENSÖRLERDE TÜREV ..................................................................................... 31
6.1. Christoffel Sembolleri ...................................................................................... 31
6.1.1. I. Tip Christoffel Sembolü ........................................................................ 31
6.1.2. II. Tip Christoffel Sembolü ....................................................................... 32
6.2. Kovariant Türev .............................................................................................. 33
ii
6.2.1. Kovariant Türevin Fiziksel Yorumu ........................................................ 34
7. SONUÇ..................................................................................................................... 36
8. KAYNAKLAR ........................................................................................................ 37
iii
ŞEKİLLER DİZİNİ
Şekil 1: İki boyutlu kartezyen koordinat sistemi için ortogonal izdüşüm ...................... 8
Şekil 2: Ortogonal olmayan koordinat sisteminde paralel izdüşüm. .............................. 9
Şekil 3: Ortogonal olmayan koordinat sisteminde ortogonal izdüşüm .......................... 9
Şekil 4: Paralel ve Ortogonal izdüşüm sonucu elde edilen kovariant ve kontravariant
bileşenler. ...................................................................................................................... 10
Şekil 5: Koordinat eğrileri ve koordinat yüzeyleri ....................................................... 14
Şekil 6: Küresel koordinatlardaki bir P noktasının gösterimi ...................................... 14
Şekil 7: Fiziksel Bileşenler ........................................................................................... 26
iv
1.GİRİŞ
Fizikte, mühendislikte, bilimde ve matematikte, tensörler bazı temel yasaların temsil
edilmesinde kullanılırlar. Özellikle fizikte genel görelilikten elektrodinamiğe kadar, fiziğin
birçok alanında tensörler çokça kullanım alanına sahiptirler.
Skaler bir alan, bir skaler sayı ile bir nokta arasındaki karşılamayı tanımlar. N-boyutlu
bir vektör alanı ise, N-sayı ile bir nokta arasındaki karşılamadır. Bu kavram N-kare, N-küp ve
daha büyük mertebeler için bir nokta üzerinden genelleştirilirse; bu sayılar belli dönüşümleri
sağladıkları takdirde, tensör alanları olarak tanımlanırlar. Temel olarak, skaler alanlar, rankı
veya mertebesi “0” olan tensör alanlarını, vektörel alanlar ise, rankı veya mertebesi “1” olan
tensör alanlarını ifade eder.
İndis notasyonunu incelemek tensörel analiz için iyi bir başlangıç noktasıdır.
1
2.İNDİS NOTASYONU
2.1. İndis Notasyonuna Giriş
a ve b vektörleri
b b1eˆ1 b2eˆ2 b3eˆ3
a a1eˆ1 a2eˆ2 a3eˆ3
şeklinde verilmiş olsunlar. Burada ê1, ,ê2 , ê3 ortogonal baz vektörleridir.
a a1 , a2 , a3 , b b1 , b2 , b3
Şeklinde de gösterilebilen a ve b vektörlerinin matris formunda baz vektörleri ise;
eˆ1 1, 0, 0 , eˆ2 0,1, 0 , eˆ3 0,0,1
olarak verilir. İndis notasyonu vektörlerin gösteriminde büyük kolaylık ve sadelik sağlar.
Vektörün bileşenlerini temsil etmek üzere bir indis tayin edilir. Bu indisin alabileceği sayı
aralığı belirlenir, böylece tek gösterimle vektörün bütün bileşenleri tanımlanabilir. İndis
notasyonu uzun hesaplamalar sırasında daha sade ve kullanışlı bir yapı sunar.
3
y1 a11 x1 a12 x2 a13 x3 y1 a1 j x j
j 1
3
y2 a21 x1 a22 x2 a23 x3 y2 a2 j x j
j 1
3
y3 a31 x1 a32 x2 a33 x3 y3 a3 j x j
j 1
Tüm bu gösterim indis notasyonunda;
3
yi aij x j
j 1
şeklinde tek bir toplam sembolü altında yapılabilir.
Bu gösterim, toplam sembolü de kaldırılarak;
yi aij x j i, j 1, 2,3
haline getirilebilir. Böylece vektörler;
a ve b ; a ai ve b bi i 1, 2,3
olarak yazılır.
yi aij x j i, j 1, 2,3
Yukarıdaki gösterimde “i” indisine serbest indis, “j” indisine ise toplam indisi denir. Serbest
indisin, eşitliğin her iki tarafında da aynı olması gerektiğine dikkat edilmelidir.
2
Bir ifadenin indis sayısı, mertebeyi temsil eder. İndis olmayan bir sistem, 0. mertebeden
sistemdir, özel olarak skaler ismini alır. Bir tane indis barındıran sistemler, 1. mertebeden
sistemlerdir ve özel olarak vektör adı verilir. İki veya daha fazla indise sahip olan sistemler ise
sahip olduğu indis sayısı mertebesindedir. Örneğin; Tijkl veya T prqm veya Tsn µ sistemlerinin
hepsi, 4. mertebeden sistem olarak isimlendirilir.
2.2. Simetrik ve Asimetrik Sistemler
Bir sistemin sahip olduğu iki indisinin sırayla yer değiştirmesi, sistemi değiştirmiyorsa o sistem
simetriktir denir. Bu koşulu sağlayan sistemler, simetrik sistemler olarak isimlendirilir.
Tijk sistemi için eğer;
Tijk Tjik Tjki Tkji
oluyorsa, Tijk sistemi simetriktir.
İndis değişimi, sistemin işaretini değiştiriyorsa, bu durumda sistem asimetrik olarak
isimlendirilir.
Tijk Tjik Tjki Tkji
durumunda, Tijk sistemi asimetriktir.
2.3. Einstein Toplama Kuralı
Einstein Toplama Kuralı, indis notasyonunda kullandığımız toplam sembölünün ifadeden
çıkartılarak daha sade bir gösterim elde etmeye yarayan bir kabuldür. Eğer bir eşitlikte, eşitliğin
her iki tarafında iki defa tekrar eden bir indis varsa toplamın bu indis üzerinden alınacağı
anlaşılır. Bu tekrarlanan indise ‘toplam indis’ diğer tekrarlanmayan indise de ‘serbest indis’ adı
verilir.
İki vektörün skaler çarpımı incelenirse;
Ai ve B j vektörleri i,j=1,2,3 olmak üzere,
Ai Bi ABcos
olarak yazılır. A ve B vektörlerin büyüklüğünü belirtir, “i” indisi ise toplam indisidir. Toplama
kuralı ile;
A1B1 A2 B2 A3 B3 ABcos
3
olarak yazılabilir.
2.4. Cebirsel İşlemler
2.4.1. Toplama ve Çıkarma
Herhangi iki sistemin toplanabilmesi ve ya çıkarılabilmesi için sistemlerin aynı tip ve özdeş
indislere sahip olmaları gerekmektedir.
P µ ve Q µ
sistemleri için
P µ Q µ S µ ve P µ Q µ R µ
şeklinde toplama ve çıkarma yapılır.
Ancak P µ k ve Q µ
sistemleri için toplama veya çıkarma yapılamaz.
2.4.2. Çarpma
Toplama ve çıkarma için gerekli olan eşit indis kuralı çarpma için geçerli değildir. İki sistemin
çarpımı, ilk sistemin bütün bileşenlerinin ikinci sistemin bütün bileşenleriyle ayrı ayrı
çarpılmasıyla elde edilir. Çarpma sonucu oluşan yeni sistemin mertebesi, çarpmaya giren
sistemlerin mertebelerinin toplamıdır.
M ij k ve N µ sistemleri için;
M ij k N µ K ij k µ
şeklinde çarpma yapılır.
2.5. e-Permütasyon Sembolü ve Kronecker Delta
Kronecker Delta ve e-Permütasyon Sembolü, indis notasyonunda sıklıkla kullanılan iki
semboldür.
e-Permütasyon sembolü;
eij ....k eij....k
1 ; i, j,...., k , 1,2,...,N ; Çift Permütasyon ise
-1 ; i,j,....,k, 1,2,.....,N ; Tek Permütasyon ise
0 ; Diğer durumlar
tanımına sahiptir.
eijk i, j , k 1, 2 , 3 için eijk orijinal halin permütasyonu “0” olduğundan, çift permütasyona
sahiptir.
4
e213 ifadesinde, “1” ile “2” yer değiştirmiş ve “1” permütasyon olmuştur, tek permütasyon
olduğundan tanım gereği; e213 1 ‘dir.
Dolayısı ile;
e123 e213 e231 e321 e312 e132
olacaktır.
e112 , e121 ,e223 gibi tekrarlanan durumlar ise “0”dır.
Kronecker Delta;
1 ,
0 ,
ij ij i j
i
i
j
j
tanımına sahiptir.
ij i, j 1, 2,3 ifadesi için;
11 22 33 1 ve 12 21 13 31 23 32 0
olur.
2.5.1. e - δ Özdeşliği
e - δ özdeşliği, Permütasyon Sembolü ve Kronecker Deltayı birbirine bağlayan bir eşitliktir.
eijk eimn jm kn – jn km
şeklinde verilir.
2.6. Dönüşüm Denklemleri
Bir noktanın N-boyutlu uzaydaki koordinatları olan x i bağımsız değişkenlerinin, başka bir Ni
boyutlu uzaydaki x bağımsız değişkenlerine dönüşümü;
1
2
N
x i = x i ( x , x , ......... , x )
i 1, 2,..., N
şeklinde verilir. Bu dönüşüm denkleminin koordinat sisteminden bağımsız olması
gerekmektedir. Bu koşulun sağlanabilmesi için gerek ve yeter şart, Jacobian determinantının
sıfırdan farklı olmasıdır.
5
x1
x1
1
x
x 2
1
x
.
.
.
x
x 2
x
x
x
J( )
.
j
x
x
.
.
i
x N
2
. . .
2
. . .
1
x
N
x
x 2
x
. . .
.
. . .
.
. . .
.
x N
x
x1
. . .
2
N
0
x N
x
N
Eğer Jacobian determinantı sıfırdan farklı ise, dönüşüm ve dönüşümün ters dönüşümü vardır
denir.
Ters dönüşüm de;
i
i
x x ( x1 , x 2 ,....., x N ), i (1, 2,...., N )
olarak gösterilir.
2.7. Türevlerin Hesaplanması
Φ,
i
x bağımsız değişkenlerinin skaler bir fonksiyonu olsun;
Φ=Φ ( x
1
2
, x , ......... , x
N
i 1, 2, ....., N
)
Bu bağımsız değişkenlerin x i bağımsız değişkenler seti ile ilişkili olduğunu varsayıp kısmi
türev alırsak;
j
1
2
N
x
x x
x
j i 1 i 2 i ......... N
i
i
x x x
x x x x
x x
olur. İkinci kısmi türev de, x m değişkenine göre alınırsa;
j
j
2
2 x
x
j i m m j i
i
m
x x
x x x
x x x
Parantez içindeki terim G ile ifade edilirse;
G
x
j
1
2
G x , x , ...... , x
ve bu terimin x m değişkenine göre türevi alınırsa;
6
N
k
k
G G x
2 x
x m x k x m xi x k x m
Bulunan bu ifade ikinci kısmi türevde yerine konulursa;
j
j
k
2
2 x
2 x x
xi x m x j xi x m xi x k xi x m
ifadesi elde edilir. Burada “i” ve “m” indisleri serbest, “j” ve ”k” indisleri toplam indisleridir.
7
3.TENSÖR KAVRAMI VE DÖNÜŞÜMÜ
3.1. Dual Baz Vektörleri
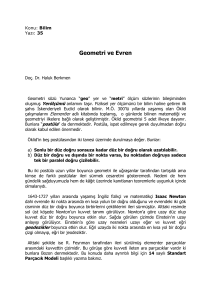
Herhangi bir vektörün, ortogonal bir koordinat sistemindeki ifadesi, vektörün koordinat
eksenlerine olan izdüşüm bileşenlerinin baz vektörleriyle çarpılmasıyla verilir.
A ( A1 e1 A2 e 2 A3 e3 )
Ancak vektör ifadesinin koordinat sisteminin eksenlerine olan izdüşümlerini elde etmenin
temel olarak iki farklı yolu vardır. Bunlar paralel izdüşüm ve ortogonal izdüşüm olarak ifade
edilen yöntemlerdir. Eksenlere paralel gönderilen bir ışığın oluşturduğu izdüşüme paralel
izdüşüm, eksenlere dik gönderilen ışığın oluşturduğu izdüşüme ortogonal izdüşüm denir.
Ortogonal bir koordinat sisteminde ışığı paralel veya dik olarak göndermek arasında bir fark
yoktur. Yani ortogonal bir koordinat sistemi için paralel izdüşüm ile ortogonal izdüşüm aynı
durumları ifade eder.
Şekil 1: İki boyutlu kartezyen koordinat sistemi için ortogonal izdüşüm
Burada A vektörü, baz vektörleri cinsinden;
A Ax e1 Ay e 2
olarak ifade edilir.
Ortogonal olmayan bir koordinat sistemi için paralel izdüşüm ve ortogonal izdüşüm karşımıza
farklı sonuçlar çıkarır. Eksenlere paralel gönderilen ışık vektörün büyüklüğünde değişime yol
açmazken, eksenlere dik gönderilen ışık, vektörün büyüklüğünde değişime yol açar.
8
Şekil 2: Ortogonal olmayan koordinat sisteminde paralel izdüşüm.
Şekil 3: Ortogonal olmayan koordinat sisteminde ortogonal izdüşüm
9
Şekil 4: Paralel ve Ortogonal izdüşüm sonucu elde edilen kovariant ve kontravariant
bileşenler.
Ortogonal olmayan bir koordinat sisteminde vektörel bir niceliğin gösterimi, seçilen izdüşüm
yöntemine göre değişiklik gösterecektir. Bu iki farklı gösterimde temsili yapılacak vektörün
ifadesi için yeni baz vektöleri ortaya atmak gerekir. Bu baz vektörleri kovariant ve kontravariant
baz vektörleridir. Vektörün ortogonal izdüşüm sonucu elde edilen bileşenleri, kovariant
bileşenler, paralel izdüşüm sonucu elde edilen bileşenleri ise kontravariant bileşenler olarak
tanımlanır. Kovariant bileşenler, alt indis ile gösterilirken, kontravariant bileşenler üst indis ile
gösterilir. Kovariant bileşenler, kontravariant bazlar ile kontravariant bileşenler ise kovariant
bazlar ile yazılır ve böylelikle vektörün büyüklüğü her iki gösterim için de aynı olur.
x
A Ax e Ay e
y
gösterimi 𝐴⃗ vektörünün kovariant bileşenlerinin kontravariant baz vektörleriyle yazımıyken,
A Ax e x A y e y
gösterimi 𝐴⃗ vektörünün kontravariant bileşenlerinin kovariant baz vektörleriyle ifadesidir.
Vektörün büyüklüğünü değiştirmeyen bu kovariant ve kontravariant baz vektörlerinin ikisine
birden “dual baz vektörleri” denir.
3.2. Ters (Reciprocal) Bazlar
A ( A1 e1 A2 e 2 A3 e3 )
Burada
A1 , A2 , A3
, A vektörünün e1 , e2 , e3 bazlarına göre bileşenleridir.
A vektörü;
A ( A e1 )e1 ( A e2 )e2 ( A e3 )e3
10
olarak da ifade edilebilir.
( E1 , E 2 , E 3 ) , ortogonal (lineer bağımsız) ancak birim uzunlukta olmayan bazlar olsun;
Bu durumda A vektörü, bu yeni sistem cinsinden;
A E1
A E2
A E3
A
E1
E2
E3
E1 E1
E2 E2
E3 E3
olarak yazılabilir.
Burada A vektörünün bileşenleri
Ai
A E i
i=1,2,3
E (i) E (i)
olarak verilir ve (i) ifadesi i indisi üzerinden toplam alınmayacağını belirtir.
E , E , E bazları, ters (Reciprocal) baz
j
1
E i E i j koşulu sağlanıyorsa, ( E1 , E 2 , E 3 ) ve
2
3
j
olarak isimlendirirler. Bu koşul, E i E olmasını gerektirir.
A vektörü kovariant bileşenler cinsinden;
1
2
A A1 E A2 E A3 E
3
Kontravariant bileşenler cinsinden de;
A A1 E1 A2 E 2 A3 E 3
olarak ifade edilir.
Ters bazların birbirine dik olmasından dolayı şu bağıntı yazılabilir;
1
E V 1 E 2 E 3
burada V, belirlenmesi gereken bir sabittir. Kronecker ilişkisini kullanarak bu sabiti belirlemek
kolaydır, her iki taraf E1 vektörüyle skaler çarpılır ve ifade düzenlenirse;
1
V E1 E E1 ( E 2 E 3 )
elde edilir.
j
1
E i E i j olduğuna göre E1 E 11 olur.
V 11 E1 ( E 2 E 3 )
11 1 olduğundan V sabiti;
V E1 ( E 2 E3 )
11
olarak bulunur.
Böylece ters baz vektörleri;
1
E
2
3
1
1
1
( E 2 E 3 ) , E ( E 3 E1 ) , E ( E1 E 2 )
V
V
V
ilişkisinden
1
E
2
3
E 2 E3
E 3 E1
E1 E 2
, E
, E
E1 ( E 2 E 3 )
E1 ( E 2 E 3 )
E1 ( E 2 E 3 )
olarak bulunur. Burada “V” sabitinin geometrik ifadesi, paralelyüzlünün hacmi olmasıdır.
j
E i E i j olurken eş bazların çarpımı ise uzayın metriğini tanımlar.
i
j
E i E j g ij g ji ve E E g ij g ji
A vektörünün kontravariant baz vektörleriyle yazılmış ifadesini E1 kovariant baz vektörüyle
çarparsak;
1
2
3
A E1 A1 E E1 A2 E E1 A3 E E1 A1
olduğu görülür.
A vektörünün bu sefer kovariant baz vektörleriyle yazılmış ifadesini E1 kovariant baz
vektörüyle çarparsak;
A E1 A1 E1 E1 A2 E 2 E1 A3 E 3 E1
önceki eşitlikten A E1 A1 olduğunu bildiğimizden sonuç olarak;
A1 A E1 A1 E1 E1 A2 E 2 E1 A3 E 3 E1 A1g11 A2 g12 A3 g13
elde edilir. Bütün bileşenler için yazılırsa;
A1 A1 g11 A2 g12 A3 g13
A2 A1 g21 A2 g22 A3 g23
A3 A1 g31 A2 g32 A3 g33
olduğu görülür. Genel olarak;
Ai gik Ak ve Ai g ik Ak
şeklinde bir vektörün kovariant ve kontravariant bileşenlerinin ilişkisi ifade edilmiş olur.
12
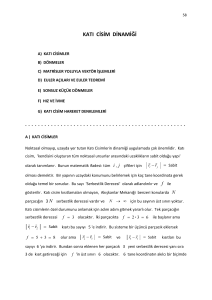
3.3. Koordinat Dönüşümleri
Koordinat seti (x,y,z)’den diğer bir koordinat seti olan (u,v,w) bir dönüşüm olduğunu
varsayalım. Dönüşüm denklemleri;
x x(u , v, w) , y y (u , v, w) ve z z (u , v, w)
Şeklinde tanımlanırken ters dönüşüm denklemleri ise;
u u ( x, y , z ) , v v( x, y, z ) ve w w( x, y, z )
şeklinde tanımlı olacaktır.
Bu dönüşüm denklemleri, bir koordinat yüzeyi seti tanımlar. Koordinat yüzeylerinin
denklemleri;
u ( x, y, z ) c1 , v( x, y, z ) c 2 ve w( x, y, z ) c3
olur ve burada c1, c2 ve c3 birer sabittir. Bu yüzeyler koordinat eğrileriyle kesişirler;
r u , c2 , c3 , r (c1 , v, c3 ) , r (c1 ,c2 ,w)
Burada konum vektörü;
r = r (u, v, w) x(u, v, w)e1 y(u, v, w)e 2 z (u, v, w)e3
olarak ifade edilmektedir.
Dual baz vektörlerini dikkate alırsak;
1
2
3
E u , E = v , E w
ifadeleri, koordinat yüzeylerinin kesişimlerinin ortak noktaları olarak değerlendirilebilir.
E , E , E vektör sistemi, koordinat yüzeylerinin normalleridir ve baz vektör sistemi olarak
1
2
3
seçilebilir. Aynı şekilde;
E1 =
r
r
, E2 =
v
u
, E3
r
w
ifadeleri de koordinat yüzeylerinin kesişimlerinin ortak noktaları olarak değerlendirilebilir,
bu durumda ise ( E1 , E 2 , E 3 ) vektör sistemi, baz vektör sistemi olarak seçilebilir, bu sistem ise
koordinat eğrilerinin teğet vektörleridir. Böylece normal bazlar ve teğetsel bazlar, ters bazlar
setini oluşturmuş olur.
13
Şekil 5: Koordinat eğrileri ve koordinat yüzeyleri
( Kaynak: Introduction to Tensor Calculus and Continuum Mechanics / J. H. Heinbockel )
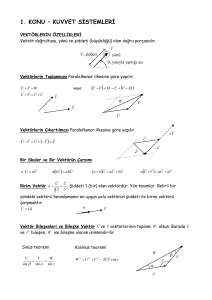
Örnek;
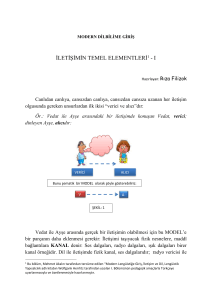
Küresel koordinatlarda dual baz vektörleri;
Şekil 6: Küresel koordinatlardaki bir P noktasının gösterimi
14
Dönüşüm denklemleri;
x x(r , , ) r sin cos , y y (r , , ) r sin sin , z z (r , , ) r cos
konum vektörü ise;
r r sin cos e1 r sin sin e2 r cos e3
olur. Bazlar;
r
= sin cos e1 sin sin e 2 cos e3
r
r
E2
= r cos cos e1 r cos sin e 2 r sin e3
r
E3 =
= r sin sin e1 r sin cos e 2 0e3
E1
olarak bulunur. Diğer bazlar ise;
V= E1 E 2 E 3
sin cos
= r cos cos
- r sin sin
sin sin
cos
r cos sin - r sin = r 2 sin
r sin cos
0
şeklinde determinant işlemiyle V niceliği bulunduktan sonra;
e1
e2
e3
1
1
E = 2
E 2 E3 = 2
r cos cos r cos sin r sin
r sin
r sin
- r sin sin r sin cos
0
1
1
işlemiyle E bulunur;
E = sin cos e1 - sin sin e2 cos e3
1
Diğer bileşenler de;
e1
e2
e3
1
1
E 2
E 3 E1 = 2
- r sin sin r sin cos
0
r sin
r sin
sin cos
sin sin cos
2
2
E =
1
1
1
cos cos e1 cos sin e 2 sin e3
r
r
r
1
1
E 2
E1 E 2 = 2
r sin
r sin
3
e1
e2
e3
sin cos
sin sin
cos
r cos cos r cos sin r sin
15
3
1 sin
1 cos
E =
e1
e2
r cos
r sin
şeklinde bulunur.
3.4. Vektör Dönüşümü
3.4.1 Kontravariant Bileşenler
VN vektör uzayında tanımlı bir C eğrisinin parametrik denklemi;
C : x i = x i t i 1, , N
olarak verilsin. C eğrisine teğet olan vektör;
dx1 dx 2
dx N
T =
,
, .... ,
dt
dt
dt
olarak ifade edilir.
İndis notasyonu ile bu ifade;
dxi
T
i 1, , N
dt
i
olarak gösterilir.
Dönüşüm denklemleriyle, C eğrisi, bar koordinatlarda;
i
x =x
i
x t , x t , .... , x t = x t
1
2
i
N
olarak ifade edilir.
Bar koordinat sistemindeki teğet vektör ise;
dx
T =
dt
i
i
olarak ifade edilir. Bu ifade, zincir kuralı ile düzenlenirse;
i
i
i
i
dx
d x dx j
dx j
T =
=
T =
T
j
dt
dx dt
dx j
i
şeklinde bar sistemle unbar sistem arasında dönüşüm elde edilmiş olur.
16
Tanım: (Kontravariant Tensör)
x
1
, x 2 , .... x N sistemindeki A i niceliği ve
x , x
1
2
, .... x
N
sistemindeki A niceliği
i
sıfırdan farklı J determinantı için;
i
dx j
A =J
A
dx j
i
w
dönüşüm denklemini sağlıyorlarsa, bu nicelikler rankı veya mertebesi “1”, ağırlığı w olan,
rölatif kontravariant tensörün bileşenleri olarak isimlendirilirler. Eğer özel olarak “w=0” ise o
halde rankı ya da mertebesi 1 olan mutlak kontravariant tensörün bileşenleri olarak
adlandırılırlar.
3.4.2 Kovariant Bileşenler
A x = A x olacak şekilde skaler invariant bir nicelik alınırsa,
A x1 , x 2 ,.... , x N = A x , x ,.... , x
1
2
N
olarak da gösterilebilen bu nicelik
A
x
=
i
A
x
i
şeklinde yazılabilir. Zincir kuralı ile;
A
x
i
=
A
x
i
=
A x j
j
x x
i
olur.
Aj =
A
A
ve Ai =
j
i
x
x
olarak gösterilirse dönüşüm denklemi;
Ai = A j
x j
x
i
şeklinde bar sistemle unbar sistem arasında dönüşüm elde edilmiş olur.
17
Tanım: (Kovariant Tensör)
x
, x 2 , .... , x N sistemindeki A i niceliği ve
x
, x , ...., x
1
1
2
N
sistemindeki A
niceliği
i
sıfırdan farklı J determinantı için;
Ai = J w
x j
x
i
Aj
dönüşüm denklemini sağlıyorlarsa, bu nicelikler rankı veya mertebesi “1”, ağırlığı w olan,
rölatif kovariant tensörün bileşenleri olarak isimlendirilirler. Eğer özel olarak “w=0” ise o halde
rankı ya da mertebesi 1 olan mutlak kovariant tensörün bileşenleri olarak adlandırılırlar.
3.5. Yüksek Mertebeden Tensörler
x
1
, x 2 , .... , x N sistemindeki Aij x niceliği ve
x , x
1
2
, ..... , x
N
sistemindeki A x
mn
niceliği,
sıfırdan farklı J determinantı için;
mn
A
m
n
x x ij
x =J
A x
xi x j
w
dönüşüm denklemini sağlıyorlarsa, bu nicelikler, rankı veya mertebesi “2” ağırlığı w olan,
rölatif kontravariant tensörün bileşenleri olarak isimlendirilir. Eğer özel olarak “w=0” ise o
halde rankı ya da mertebesi “2” olan mutlak kontravariant tensörün bileşenleri olarak
adlandırılırlar.
Kovariant bileşenler ise;
x
1
, x 2 , .... , x N sistemindeki Aij x niceliği,
x , x
1
2
, ..... , x
N
sistemindeki, A x niceliği tanımlanarak,
mn
sıfırdan farklı J determinantı için;
Amn x = J
w
xi x j
m
x x
18
n
Aij x
şeklindeki dönüşüm denklemini sağlarlar. Bu niceliklere ise rankı veya mertebesi “2”, ağırlığı
w olan rölatif kovariant tensörün bileşenleri olarak isimlendirilir. Eğer özel olarak “w=0” ise,
rankı ya da mertebesi “2” olan mutlak kovariant tensörün bileşenleri olarak adlandırılırlar.
İkinci mertebeden karışık tensörler için;
x
1
, x 2 , .... , x N sistemindeki Aij x niceliği ve
x , x
1
2
, ..... , x
N
sistemindeki A x niceliği tanımlanmış olsun.
n
m
sıfırdan farklı J determinantı için;
n
m
A
n
x x j i
x =J
Aj x
xi x m
w
dönüşüm denklemi sağlanıyorsa, bu niceliklere rankı ya da mertebesi “2” olan rölatif tensörün
bileşenleri adı verilir. ”w=0” ise rankı ya da mertebesi “2” olan mutlak tensörün bileşenleri adı
verilir.
Genel olarak yüksek mertebeden tensörler için;
Tba11ba22........ban m x ve T j1 j2 .... jn x
i1i2 ....im
nicelikleri için dönüşüm denklemi;
T
i1i2 ....im
j1 j2 .... jn
w
i1
i2
im
x x x
x xb1 xb2
xbn a1a2 ....am
x = J
....
....
Tb1b2 ....bn x
j1
j2
jn
am
a
a
x x 1 x 2 x x x
x
olarak tanımlanır.
19
4. ÖZEL TENSÖRLER
Tensörlerin genel özellikleri incelendikten sonra, fiziksel problemlerde karşılaşılma ihtimali
yüksek olan bazı özel tensörlere de değinmek yararlı olacaktır.
4.1. Metrik Tensör
N-Boyutlu kartezyen koordinat sistemi için y i i 1, 2,...., N tanımı yapılsın.
x1 , x 2 , .... , x N genelleştirilmiş koordinatlar olmak üzere;
y i = yi x1 , x 2 , .... , x N şeklinde tanımlı olsun.
Her bir koordinatın türevi şu şekilde belirtilir;
y m j
dx
x j
dy m =
Diğer yandan yi ile yi dy i noktaları arasındaki mesafenin karesi;
ds2 dy m dy m dy1 dy 2 .... dy N
2
2
2
ifadesiyle gösterilir.
Bu ifade, koordinat türevi şeklinde verilirse;
ds 2 =
y m y m i j
dx dx
xi x j
ifadesi elde edilir.
g ij
y m y m
x i x j
olduğu göz önünde bulundurularak;
ds 2 =
y m y m i j
dx dx = g ij dx i dx j
i
j
x x
eşitliği elde edilir.
y m y m
Burada g ij i
ifadesine, xi koordinatları ile tanımlanan uzayın metriği denir. Burada
j
x x
g ij , x koordinatlarının bir fonksiyonudur ve dolayısıyla gij = gij x olarak da yazılabilir.
Metrik tensör i ve j indislerine göre simetriktir, yani;
gij = g ji
i
Bar koordinatlar ele alınırsa, x , uzunluğun karesi;
20
2
i
d s = g ij d x d x
j
olarak yazılır.
Burada da, g ij = g ij x olarak verilir yani, g ij ifadesi, bar koordinatlarının bir fonksiyonudur.
Metrik tensör elemanı temel olarak;
gij = E i E j , i, j 1, 2,3
ile verilir.
Uzunluk elemanının karesi açık halde;
ds 2 = g11 dx1 g12 dx 2 g13 dx3
2
2
2
g 21 dx1 g 22 dx 2 g 23 dx3
2
2
g 31 dx1 g 32 dx 2 g 33 dx3
2
2
2
2
olarak yazılır. Burada;
gij 1 (i j )
gij 0 i j
ise uzay düz ve ortogonaldir.
gij 1 (i j )
gij 0 i j
ise uzay düzdür ancak ortogonal değildir. Düzlemlerin dik olmadan kesişmesiyle oluşur.
gij 1 (i j )
gij 0 i j
ise uzay eğrisel ve ortogonaldir.
gij 1 (i j )
gij 0 i j
ise uzay eğriseldir ancak ortogonal değildir.
Kartezyen koordinatlar için uzunluk elemanının karesi;
ds 2 dx 2 dy 2 dz 2
olarak verilir. Kartezyen koordinatlar için metrik tensör;
21
1 0 0
gij = 0 1 0
0 0 1
olarak matris formunda yazılabilir. Görüldüğü üzere matrisin diagonal elemanları 1 olduğundan
anlaşılır ki bu uzay ortogonaldir. Matrisin diğer terimlerinin tamamı da 0 olduğundan anlaşılır
ki bu uzay düzdür.
Özetleyecek olursak, metrik tensör matrisinin diagonal elemanları uzayın düzlüğü, kalan diğer
terimleri ise uzayın ortogonalliği hakkında bilgi verir.
Küresel koordinatlar için metrik tensör yazılmak istenirse, dönüşüm denklemleri;
x x(r , , ) r sin cos
y y (r , , ) r sin sin
z z (r , , ) r cos
olduğuna göre konum vektörü;
r r sin cos e1 r sin sin e2 r cos e3
olarak yazılır. Koordinat eğrilerinin teğet vektörleri;
r
= sin cos e1 sin sin e 2 cos e3
r
r
E2
= r cos cos e1 r cos sin e 2 - r sin e3
r
E3 =
= - r sin sin e1 rsin cos e 2 0e3
E1
olarak bulunur.
g ij E i E j
olduğu göz önünde bulundurularak metrik tensör matrisinin her bileşeni ayrı ayrı hesaplanırsa;
g12 g13 g 21 g 23 g31 g32 0
ve diagonal elemanlar da
g11 1
g22 r 2
g33 r 2 sin
olarak bulunur.
Bu bilgilerle küresel koordinatlar için metrik tensörün matris gösterimi;
22
1 0
0 r2
0 0
g
ij
0
0
2
r sin
şeklinde yapılır.
4.2. Konjuge Metrik Tensör
Ortogonal sistemler için , Ai ve A j kovariant ve kontravariant bileşenler olsun.
Ai gij A j ifadesini g im ile çarparsak;
g im Ai g im gij A j
elde edilir ve g imgij jm olduğundan;
g im Ai g im gij A j jm A j
ifadesine ulaşılır.
Toplama kuralı uygulanırsa;
jm A j Am
olduğu görülür. Sonuç olarak;
Am = gimAi
ifadesi elde edilir.
Ortogonal sistemler için;
g
ij
g11
= 0
0
0
g 22
0
0
0
g33
olduğuna göre ve gij g ij = olduğundan bir matrissel denklem yazmak mümkündür;
g11
0
0
0
g 22
0
0 a 0 0 1 0 0
0 0 b 0 0 1 0
g33
0 0 c 0 0 1
burada, a, b, c konjuge metrik tensörünün elemanlarıdır. O halde;
23
0
ag11
0 bg 22
0
0
0 1 0 0
0 = 0 1 0
cg33 0 0 1
olduğundan konjuge metrik tensörün elemanları;
a
1
1
1
, b
, c
g11
g22
g33
olarak bulunur. O halde konjuge metrik tensörün matris formu;
g
ij
g 11
= 0
0
0
g 22
0
1
g
0 11
0 = 0
g 33
0
0
1
g 22
0
0
0
1
g33
olarak verilir.
Ortogonal kartezyen koordinat sistemleri için metrik tensör aşağıdaki şekilde verildiğinden;
g
ij
1 0 0
= 0 1 0
0 0 1
ve konjuge metrik tensörün diagonal elemanları, ortogonal sistemler için, metrik tensörün
diagonal elemanlarının çarpmaya göre tersi olduğundan;
g
ij
1
g11
= 0
0
0
1 0 0
0 0 1 0
0 0 1
1
g33
0
1
g 22
0
sonucu karşımıza çıkar. Buradan bir kez daha ortogonal kartezyen koordinat sistemleri için,
kovariant ve kontravariant bileşenlerin aynı olduğu sonucu ortaya çıkar.
4.3. Associated Tensör
Bir tensörün, metrik ya da konjuge metrik tensörle iç çarpımından oluşan tensörlerdir.
Örnek olarak;
g ij Ai A j veya gij A j Ai
24
verilebilir.
Başka örnekler olarak;
g mi Sijk S.mjk
g mj Rijk Rmi.k
T pqrs g pi g qj g rk g smTijkm
verilebilir. İndis yerine konulan (.), o indise göre metrik ile kontrakt edildiğini yani çarpım
sonucu düşen indisi ifade eder.
4.4. Fiziksel Bileşenler
Keyfi bir A vektörü, koordinat sistemi ve baz vektörlere bağlı olarak birçok formda temsil
edilebilir. Kartezyen koordinat sisteminde tanımlı bir A vektörü;
A Ax e1 Ay e2 Az e3
olarak gösterilebilirken,
daha genel bir koordinat sistemindeki koordinat dönüşümü için,
A vektörü kontravariant bileşenler cinsinden;
A A1 E1 A2 E 2 A3 E 3
olarak teğet bazlara göre yazılabileceği gibi,
A vektörü kovariant bileşenler cinsinden;
1
2
A A1 E A2 E A3 E
3
olarak normal baz vektörlerine göre de ifade edilebilir. Bu iki denklem, aynı vektörün, farklı
formlarda gösterimleridir. Bu gösterimlerde kullanılan baz vektörlerinin ortogonal ya da birim
vektör olma zorunluluğu yoktur.
A vektörünün fiziksel bileşenleri, vektörün koordinat eksenlerine olan izdüşümü ile belirlenir.
Bu izdüşüm, koordinat sisteminin baz vektörlerinin vektörün kendisiyle çarpılmasıyla elde
edilir.
A vektörünün E1 baz vektörü yönündeki bileşeni;
A
E1
=
E1
A1
E1
şeklinde bulunur. Burada E1 birim vektör olmadığından büyüklüğe bölünmüştür.
25
1
Aynı şekilde, A vektörünün E baz vektörü yönündeki fiziksel bileşeni;
A
E
E
1
1
A1
=
E
1
şeklinde bulunur.
Şekil 7: Fiziksel Bileşenler
( Kaynak: Introduction to Tensor Calculus and Continuum Mechanics / J. H. Heinbockel )
Şekil 7 ile gösterilen sistemde; , ve , 1 ilişkisini sağlayan pozitif sabitlerdir.
Ortogonal olmayan bazlar şekilden de görüldüğü gibi;
E1 e1 , E 2 e1 e2 , E 3 e3
olarak verilmiştir. Ters baz vektörleri;
E 2 E3
1
E
E1 E 2 E 3
2
E
3
E
e1 e2
E 3 E1
E1 E 2 E 3
E1 E 2
E1 E 2 E 3
e2
e3
olarak bulunur.
Keyfi bir A vektörü olan ve A Ax e1 Ay e2 şeklinde gösterilen vektörün kontravariant formda
gösteriminin A A1 E1 A2 E 2 olduğu göz önünde bulundurulursa vektörün kontravariant
bileşenleri;
1
2
A1 A E Ax Ay ve A2 A E Ay
26
olarak bulunur.
1
2
A vektörünün A A1 E A2 E şeklindeki gösteriminde yer alan kovariant bileşenleri ise;
A1 A E1 Ax ve A2 A E 2 Ax Ay
olarak elde edilir.
1
2
A vektörünün E ve E yönlerindeki fiziksel bileşenleri ise elde edilen sonuçların bu bazların
büyüklüklerine bölünmesiyle;
A
E
E
A
E
E
1
1
E
2
2
A1
1
A2
E
2
Ax Ay
2 2
A 1
Ay
Ay A 2
olarak elde edilir.
Bu sonuçlar skaler çarpım ile de;
A
E
E
A
E
E
1
1
1
1
E
2
2
2
1
2
2
A1 E E A2 E E
1
2
1
A1 E E A2 E E
E
2
A1
A 2
olacak şekilde elde edilebilirler.
4.4.1. Ortogonal Koordinatlarda Fiziksel Bileşenler
Ortogonal koordinatlarda uzunluk elemanın karesi, metrik tensörün;
h1 2
gij 0
0
0
0
2
h3
0
h2
2
0
olduğu durum için,
ds 2 gij dxi dx j h1 dx1 h2 dx2 h3 dx3
2
2
şeklinde ifade edilir.
27
2
2
2
2
Eğrisel ve ortogonal olan bu koordinat sisteminde x1 ekseni için i i 1, 2,3 birim vektörü
tanımı yapılırsa;
1
dx1
ve 2 3 0
ds
olur. Birim vektör için;
1 gij i j
eşitliği yazılabileceğine göre;
1 gij i j g1111 h1 1
2
2
ifadesi elde edilir. Böylece;
1
1
h1
olarak bulunur.
A vektörünün x i yönündeki Ai bileşeninin i birim vektörüne olan izdüşümü incelenecek
olursa;
A 1 gij Ai j g11 A11 h1 A1
2
1
h1 A1
h1
elde edilir.
Benzer olarak x 2 için i ve x 3 için i birim vektörleri seçilirse;
2
dx 2
dx 3 1
, 1 3 0 ve 3
, 2 0
ds
ds
Fiziksel bileşenler ise;
A 2 h2 A2 ve A 3 h3 A3
olarak bulunur.
Yani vektörün kontravariant terimlerinin fiziksel bileşenleri, metrik tensör matrisinin ilgili
diagonal elemanıyla (scale factor) çarpılmasıyla bulunur.
Daha genel bir ifadeyle, mertebesi “1” olan kontravariant bir tensörün fiziksel bileşenleri;
A i hi Ai gi i Ai
eşitliği ile belirlenir.
Kovariant bir tensörün fiziksel bileşenlerinin bulunmasında metrik tensör ve konjuge metrik
tensör arasındaki ilişki kullanılabilir. Ortogonal bir koordinat sistemi için metrik tensör ve
konjuge metrik tensör arasında;
28
g i i
1
i
gi i
1, 2,3
ilişkisi vardır. x1 yönündeki kovariant bileşenler;
1 g111 h1
2
1
h1 , 2 3 0
h1
olarak verilir.
gij Ai j gij Ai g jmm
eşitliği kullanılarak;
A11 g11 A1h1
A
1
1 A(1)
2
h1
h1
olarak x1 yönündeki fiziksel bileşen bulunur. Benzer şekilde;
A 2
A
A2
ve A 3 3
h2
h3
olarak diğer fiziksel bileşenler de elde edilir.
Yani vektörün kovariant terimlerinin fiziksel bileşenleri, metrik tensör matrisinin ilgili diagonal
elemanıyla (scale factor) bölünmesiyle bulunur.
Daha genel bir ifadeyle, mertebesi “1” olan kovariant bir tensörün fiziksel bileşenleri;
A i
Ai
hi
Ai
gi i
eşitliği ile belirlenir.
Ortogonal bir koordinat sisteminde, kontravariant ve kovariant terimlerin fiziksel bileşenleri
aynıdır. Bu durum şu şekilde ispat edilebilir;
Ai gij Aj
ifadesi şu şekilde toplama açılabilir;
Aj A1 g1 j A2 g 2 j A3 g3 j
burada i j için gij 0 olduğuna göre;
Ai gi i A(i )
sonucu elde edilir. Bu eşitlikten kovariant ve kontravariant fiziksel bileşen ifadelerinin
aşağıdaki şekilde birbirine eşit olduğu görülebilir;
29
A i Ai gi i
30
Ai
gi i
6. TENSÖRLERDE TÜREV
Tensörel analizin en önemli problemlerinden biri metrik tensörün ve onun türevlerinin elde
edilmesidir. Bu bölümde, tensörel türev için gerekli olan yapılar incelenerek tensörlerin
türevlenebilirliğiyle ilgili bilgi elde edilmeye çalışılacak. Metrik tensörün türevlerine
ulaşabilmek için, ‘Christoffel Sembolleri’ denilen yapıyı kurmaya ihtiyaç vardır.
6.1. Christoffel Sembolleri
6.1.1. I. Tip Christoffel Sembolü
Aşağıdaki dönüşüm denklemini sağlayan bir metrik tensör tanımlanmış olsun;
g g ab
x a xb
x x
ve , , niceliği dönüşüm metriğinin türevi olarak aşağıdaki şekilde tanımlansın;
, ,
g
x
Bu durumda , , niceliği çarpımın türevinde;
, ,
g
x
g ab x c x a xb
c
x x x x
halini alır. Bu noktada belirlenen
g ab
2 xa
xb
x x x
g ab
x a
2 xb
x x x
1
, , , , , , kombinasyon terimi
2
g g
1
1 g
, , , , , ,
2
2 x
x
x
sonucunu verir. Dönüşüm altında bu eşitlik;
1
1 gab gbc gca x a xb xc
2 x a xb
gab
, , , , , , c a b
2
2 x
x
x x x x
x x x
haline gelir. Buradaki parantez içindeki terim I. Tip Christoffel sembolü olarak tanımlanır ve
aşağıdaki notasyonla gösterilir;
ac, b ca, b
1 gab gbc gca
2 xc x a xb
Metrik tensörün, gij g ji özelliğine sahip simetrik bir tensör olmasından dolayı; I. Tip
Christoffel Sembolü, ilk iki terime göre simetrik olur.
31
6.1.2. II. Tip Christoffel Sembolü
I. Tip Christoffel Sembolü için dönüşüm denklemi;
, ac, b
x a xb xc
x x x
gab
2 xa
xb
x x x
şeklinde verilir. I. Tip Christoffel Sembolünün bir tensör gibi dönüşmesini engelleyen
2 xa
gab
xb
x x x
x de
terimi
g ifadesi ile çarpılırsa;
x d
2 xa
xb x de
2 xa
2 xa
2 xa
2 xe
bd de
be
e
g ab
g
g
g
g
g
ab
ab
a
d
x x x x
x x
x x
x x
x x
sonucu elde edilir.
Dönüşüm denkleminin tamamı gab
x
2
2 xa
xb
x x x
terimiyle çarpılır ve elde edilen denklemden
e
x x
ifadesi çekilirse;
2 xe
x
g ac, d , d g de
x
x x
x x
de
x a x c
sonucuna ulaşılır. Bu denkleme temel dönüşüm olan g de g
x d xe
x x
eşitliği uygulanırsa
denklem;
2 xe
x x
g de ac, d
x a xc
x
x
g
,
xe
x
haline gelir ve II. Tip Christoffel Sembolü;
i i
1 i g k g j g jk
i
g jk , g j k
2
x
x
j k k j
x
olarak tanımlanır. II. Tip Christoffel Sembolü için dönüşüm denklemi;
xe e x a xc
2 xe
x
a c x x x x
olarak verilir. I. Tip Christoffel Sembolü için olduğu gibi II. Tip Christoffel Sembolü de bir
2 xe
tensörel nicelik gibi dönüşmez. Bunu engelleyen bu sefer,
terimidir.
x x
32
I. ve II. Tip Christoffel Sembolleri, birbirleri cinsinden ifade edilebilirler. Tanım olarak II. Tip
Christoffel Sembolü halihazırda I. Tip Christoffel Sembolünü içeriyor.
i
i
g jk ,
j
k
Bu tanım denklemi g i ile çarpılırsa;
i
g i g i g i jk , jk , jk ,
j k
ifadesine ulaşılır. Sonuç olarak
i
j k
jk , g i
eşitliğiyle I. Tip Christoffel Sembolü II. Tip Christoffel Sembolü cinsinden yazılmış olur.
6.2. Kovariant Türev
A Ai
xi
x
olarak verilen dönüşüm denklemine uyan, mertebesi “1” olan ve Ai ile verilen bir
kovariant tensör tanımlanmış olsun. Bu dönüşüm denkleminin x
alınırsa;
A
x
Ai
2 xi
x x
koordinatına göre türevi
Ai x j xi
x j x x
elde edilir. Bu eşitlik II. Tip Christoffel Sembolü için verilen dönüşüm denklemiyle;
xi i x j x k A x j xi
A
ij
i
x j k x x x x x
x
A
şeklinde yazılabilir. Ai için verilen dönüşüm denklemi kullanılarak;
Aj x j x k
i x j x k
A
Ai
k
x x x
j k x x
x
A
eşitliğine ulaşılır. Bu eşitlik biraz düzenlenirse;
A
Aj
i x j x k
A
k Ai
x
x
j k x x
sonucuna ulaşılır. Bu aşamada da Aj niceliğinin x k bileşenine göre kovariant türev tanımı;
33
Aj,k
Aj
i
Ai
x
j k
k
şeklinde yapılabilir. Bu sonuç, kovariant bir tensörün kovariant türevinin mertebesi “2” olan
yeni bir tensör oluşturacağını gösterir. Oluşan bu yeni tensör;
A , Aj ,k
x j x k
x x
ile verilen dönüşüm denklemine uyar.
6.2.1. Kovariant Türevin Fiziksel Yorumu
Genelleştirilmiş koordinatları x1 , x 2 , x3 ve baz vektörleri E1 , E 2 , E 3 olan bir sistem ele
alınmış olsun. Baz vektörlerinin konumla değişiyor olması matematiksel olarak her bir baz
vektörünün koordinatların bir fonksiyonu olarak aşağıdaki gibi verilmesini gerektirir;
E i E i x1 , x 2 , x3
r
xi
i 1, 2,3
Ters bazlar da koordinatların fonksiyonu olarak;
E E x1 , x2 , x3
i
i
i 1, 2,3
şeklinde yazılabilir.
Bu bilgilerle bir A vektörü, kontravariant bileşenler cinsinden;
A A1 E1 A2 E 2 A3 E 3 A j E j
olarak verilirken, kovariant bileşenler cinsinden de;
1
2
3
A A1 E A2 E A3 E Aj E
j
olarak gösterilebilir. A vektöründeki değişim;
dA
şeklinde yazılabilir. Vektörün
A k
dx
x k
A
türevi kontravariant bileşenler cinsinden;
x k
A
A j
j E j
A
Ej
x k
x k x k
olarak verilirken kovariant bileşenler cinsinden;.
34
A
E A j
Aj k kj E
k
x
x
x
j
şeklinde yazılır. Kovariant bileşenlerin kovariant türev tanımı;
j
A
A
E
Ai ,k k E i ki Aj k E i
x
x
x
olarak verilmişti. Kontravariant bileşenlerin kovariant türevi ise;
i
A ,k
A i Ai
E j i
k E k Aj k E
x
x
x
olarak tanımlanır. Baz vektörlerin türevleri;
j
j
E
E j m
ve
E
m
x k j k
x k
m
m
E
k
olarak verilebilir. Bu durumda, baz vektörlerinin türevleri ile kendilerinin skaler çarpımı II .
Tip Christoffel Sembolünü verecektir;
i
E
i
m i i
E j m
E
m E
m
x k j k
j k
j
j
j
E
Ei k
x
m
m
j
E Ei
k
m
k
m
j
i
k
i k
Bu durumda kovariant ve kontravariant bileşenlerin kovariant türev ifadeleri;
Ai ,k
Ai j
Aj
x k i k
Ai ,k
Ai i
x k j
j
A
k
eşitliklerine dönüşür. Bu eşitliklerin 1. terimleri, koordinat eğrileri boyunca tensörel alanların
değişim hızını ifade ederken, 2. terimler ise, koordinat eğrileri boyunca yerel baz vektörlerinin
değişimlerini temsil ederler. Bu denklemler kovariant türevin, II. Tip Christoffel Sembolü ile
ilişkili fiziksel yorumudur.
35
7. SONUÇ
Bu çalışmada ilk olarak basit vektörel gösterimin indis notasyonu yöntemiyle nasıl daha basit
ve sade olarak gösterilebileceği ele alınmış ve tensörel analizin bileşen sayısının arttığı uzun ve
karmaşık hesaplamalarında indis notasyonunun sağladığı gösterim kolaylığı vurgulanmıştır. 3.
bölümde düz uzay ve ters uzayda baz vektör tanım bağıntıları elde edildikten sonra vektör ve
koordinat dönüşümlerine yer verilmiştir. Bir vektörün temsilinde, alışıldık ortogonal koordinat
sistemlerinin dışına çıkıldığında vektör bileşenlerinin kovariant ve kontravariant olarak
farklılaştığı ve gösterim yöntemine bağlı olarak baz vektörlerinin değişmek zorunda olduğu
ayrıntısıyla incelenmiştir. Başta metrik tensör olmak üzere bazı özel tensörler incelenmiş ve
metrik tensörün uzayın fiziksel yapısı hakkında ne tarz bilgiler içerdiği detaylıca işlenmiştir.
Kovariant ve kontravariant gösterimlerde vektörün fiziksel bileşenlerine metrik tensör
kullanılarak nasıl ulaşılabileceği gösterilmiştir.
Son bölümde, tensörlerde türev işlemi kovariant türev başlığı altında araştırılmış ve bu
türevlerin hesaplanması için gerekli olan I. ve II. Tip Christoffel Sembolleri tanımlanmıştır.
Christoffel Sembollerinin ve kovariant türevin fiziksel yorumu ile çalışma sonlandırılmıştır.
Bu çalışmada tensörel analiz, giriş düzeyinde ele alınmış, kuramsal veya uygulamalı birçok
alanın teorik hesaplamalarında kendisine yer bulan tensörlerle ilgili temel bir başvuru kaynağı
oluşturulması amaç edinilmiştir. Bu amaç doğrultusunda, kovariant ve kontravariant bileşen
kavramları, metrik tensör hesaplamaları, fiziksel bileşenler gibi başlıklara detaylıca yer
verilirken kimi bazı karmaşık başlıklara ya yüzeysel değinilmiş ya da bu çalışmada yer
verilmemiştir.
36
8. KAYNAKLAR
1. Introduction to Tensor Calculus and Continuum Mechanics, / J.H. Heinbockel – 1996
2. Quick Introduction to Tensor Analysis / R. A. Sharipov – 2004
3. Vector and Tensor Analysis / Eutiquio C. Young – 1993
4. Mathematical Methods for Physicists, A Compensive Guide / George B. Arfken, Hans J.
Weber, Frank E. Harris - 2013
37