NEM SENSÖRÜ VE OTOMATİK ASPİRATÖR UYGULAMASI
Mehmet Süleyman YILDIRIM
Esin Şahan
Süleyman Demirel Üniversitesi
Elektronik Bilgisayar Eğitimi Bölümü
[email protected]
Süleyman Demirel Üniversitesi
Elektronik Bilgisayar Eğitimi Bölümü
[email protected]
ÖZET
2. NEM SENSÖRÜ
Günümüz dünyasında evimizdeki elektrikli cihazların
çoğu son derece otomatikleşmiştir. Ancak her eve
girmiş olan aspiratörler bu teknolojiye yetişememiştir.
Bu çalışma aspiratörleri tam otomatik hale getirmek
amacıyla tasarlanmıştır ve gerçekleştirilmiştir. Ayrıca
uygulanabilir olması için en düşük maliyet
hedeflenmiştir.
Nem sensörlerinin de diğer tüm sensörler gibi çeşitli
türleri bulunmaktadır. Kapasitif, endüktif tipleri daha
yoğun kullanılmaktadır.
Bu çalışmada ortamdaki nemi “nem sensörü” tarafından
alınarak mikro denetleyiciye aktarılmakta ve mikro
denetleyicideki algoritmaya göre aspiratör motorunun
hız
kademe
kontrolü
yapılabilmekte
veya
çalışma/durma gerçekleştirmektedir.
Uygulamada kullanılan sensör; Şekil 1’de görülen
RHK1AN sensörü kapasitif çalışan bir nem sensörüdür.
Havayı dielektrik madde kabul etmekte ve üzerindeki
nem yoğunluğu değiştikçe kapasite değeri ve dolayısıyla
direnç değeri değişmektedir. Girişine pozitif (+) gerilim
uygulanarak
üzerindeki
gerilim
değişimi
gözlenebilmektedir. Uygun devre ile akım değişimi de
takip edilebilir.
ABSTRACT
Nowadays home’s have to many electrical appliances
which are otomated and fully intehrated with elctronics.
However air vacuming machines (Aspirators) are not
that automatic.. For that reason in our project we try to
implement smart air vacuming machine as possible as
minimum cost.
In this study humidity has been sensed by humidity
sensor which has been plug in to the microcontroller to
operate air vuming machine ac motor to drive
accordingly. Motor rpm has been controlled automaticly
acording to relative humidty. Complete system has been
done and worked very well.
Anahtar Kelimeler:
Nem,
Mikrodenetleyici (PIC), Aspiratör
Nem
Şekil 1. Sensörün (RHK1AN) Önden Görünümü
3. OPAMP
Transistörlerden
oluşan
yükselteçlere
işlemsel
kuvvetlendirici
(Op-Amp)
denir.
Yükselteç,
karşılaştırıcı, osilatör, filtre vb. Elektronikte çok sık
kullanılan önemli bir elemandır.
Sensörü,
1. GİRİŞ
Bu çalışmada, aspiratörler tam otomatik hale
getirilmiştir. Tam otomatikden anlatılmak istenilen;
şimdiki aspiratörlerin elle kontrolünü kaldırmak ve
ortamdaki buhar değişimine göre aspiratör motorunun
hızlanıp, yavaşlamasını veya durmasını kontrol etmek
kastedilmiştir.
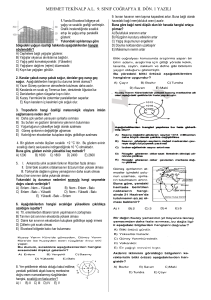
Şekil 2‘de görüldüğü üzere negatif ve pozitif olarak iki
girişi ve bir çıkışı bulunmaktadır. İki girişi arasında
gerilim farkı olursa bu farka göre çıkış gerilimini
değiştirir. Uygulamamızda opampı karşılaştırıcı olarak
kullandık. V1 ile V2 nin durumlarına göre V0
değişmektedir. Eğer V1>V2 ise V0 +V giriş değerini
verir, V2>V1 ise V0 sıfır (0) verir.
Nem sensörleri havadaki nem oranlarına göre değişik
birimlerde
çıkış
verebilen
elektronik
devre
elemanlarıdır. Birçok çeşitleri olmasına karşın kapasite
özelliği taşıyan tipin bu uygulamaya daha uygun olduğu
görülmüştür.
Şekil 2 OPAMP’ın Karşılaştırıcı Şekilde Kullanılması
Mikrodenetleyici ile nem sensöründen gelen bilgi
yorumlanarak hız kontrol katına emir verilmiştir.
4. NEM KONTROLLÜ ASPİRATÖR
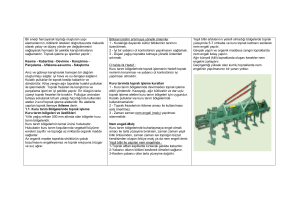
Gerçekleştirilen sistemin blok şeması Şekil 3’de
verilmiştir. Blok şemada görülen nem algılayıcı kısım
havadaki nem oranına göre analog bir çıkış vermektedir.
Analog dijital dönüştürücü gelen analog bilgiyi dijitale
dönüştürür
ve
mikrodenetleyiciye
iletir.
Mikrodenetleyici gelen bilgiye göre hız kontrol katını
yönetir.
Nem
Algılayıcı
Mikro
Denetleyici
orantılıdır.[1] Bundan dolayı V0 diğer 5K’lık direnç
üzerindeki gerilim değişimi alınmıştır. V0 bilgisi
buradan Analog Dijital Çevirici (ADC) ye
gönderilmiştir.
Analog Dijital Dönüştürücü; Analog Dijital Çevirici
(ADC) nem algılayıcısından gelen gerilim bilgisine
(V0) göre kademelerin artışını veya azalışını sağlayan
bloktur.[2] Şekil 3.4’de açık devre şeması gösterilmiştir.
Analog Dijital
Dönüştürücü
Hız Kontrol
Ünitesi
Şekil 3 Tasarlanan Sistem Blok Şeması
Şekil 4’de görülen devrede yukarıda anlatılan Analog
Dijital Dönüştürücü ve Microdenetleyici bölümleri yer
almaktadır.
Şekil 6 Analog Dijital Dönüştürücü Devre Açık Şeması
Analogdan dijital dönüştürme işlemi; V0’daki analog
bilginin R1, R2, R3, R4 ayar dirençleri üzerindeki
gerilim değerleri ile işlemsel kuvvetlendiriciler
(OPAMP)
tarafından
karşılaştırılması
şeklinde
gerçekleşmektedir.
Şekil 4. PIC’li Kontrol Devresi Açık Şeması
Nem Algılayıcı Devre; Bu devrede havadaki nemi
analog gerilim bilgisini dönüştürüp ADC bloğuna
gönderme işlemi yapılmaktadır. Bu işlemi nem sensörü
yapmaktadır. Kullandığımız Sensor (RHK1AN)
kapasitif olduğu için üzerinde gerilim/direnç değişimi
olmaktadır. Bu sebeple Şekil 5’de ki gibi devreye
bağlanmıştır.
Şekil 5. Nem Algılayıcı Devre
Sensörün havadaki nem değişimine göre üzerindeki
direnci değişmektedir. Şekilden de anlaşıldığı gibi nem
yoğunluğuyla (%RH) ile direnç değeri ters
Analog dijital dönüştürücüdeki R1, R2, R3, R4 ayar
dirençlerinin
değerleri
sistemin
hassasiyetini
belirlemektedir. Bizim seçtiğimiz değerler sistemin %55
RH ve %70 RH aralığındaki nem yoğunluğunda
çalışmasını sağlamaktadır. Bu aralık aspiratörlerin
uygulama sahasında gereken nem yoğunluğu miktarını
karşılamaktadır.
Eğer
istenirse
ölçüm
ayarı
değiştirilebilir.
Burada
kullanılan
işlemsel
kuvvetlendiriciler
LM358’dir.
Bu
işlemsel
kuvvetlendiricinin
kullanılmasının sebebi çıkışında sızmanın olmaması ya
da sistemi etkilememesidir. Çalışmalarımız sırasında
denediğimiz bir başka opamp LM741 çıkışında sistemin
kararlılığını etkileyecek kadar sızdırma yaptırdığı için
kullanılmamıştır. LM358’lerin tamamının pozitif (+)
girişine V0 bilgisi, negatif (-) girişine R1, R2, R3, R4
ayar dirençlerinden gelen kat bilgisi bağlanmıştır.
Karşılaştırma işlemi sonucunda uygun çıkışlardan
mikrodenetleyicinin RA0, RA1, RA2 girişlerinden
uygun olanına logic “1” (+5V) gönderilmektedir.
Mikrodenetleyici (PIC16F84); Projede mikrodenetleyici
olarak 16F84 entegresi kullanılmıştır. Bu entegrenin
seçilmesinin amacı genel amacımız doğrultusunda
maliyetidir.
RA0, RA1, RA2 girişlerine gelen logic “1” (+5V)
değerlerine göre RB0-RB2 portlarına Hız Kontrol
Ünitesi devresinin gereksinim duyduğu tetikleme
bilgilerini göndermektedir. Bunun yanında RB4-RB7
portları gösterge panosuna bilgi göndermek için
kullanılmıştır.
Mikrodenetleyicinin istenen görevini gerçekleştiren
program Picbasicpro da yazılmıştır. Picbasicpro’nun
seçilmesinin amacı aynı anda birden fazla işlemi
yapabilen kodların rahatlıkla yazılabilmesidir.[3] Bu
çalışmanın yazılımı için aynı anda üç girişinde kontrol
edilmesi aşağıdaki programla sağlanmıştır.
device=16f84
;pic seçimi
xtal=4
;osilatör frekansı(MHZ)
dim deg as byte
;değişken tanımlama
high porta
trisa=%11111
;porta bitlerinin hepsini Çıkış yapma
trisb=%00000000 ;portb bitlerinin hepsini Giriş yapma
portb=0
;tüm çıkışları söndür
main:
deg=0
deg.0=porta.0
;girişlerin 0. bitini değişkene aktarma
deg.1=porta.1
;girişlerin 1. bitini değişkene aktarma
deg.2=porta.2
;girişlerin 2. bitini değişkene aktarma
if deg=0 then
;eğer tüm girişler 0 ise 7.çıkısı aktif et
portb=%00000000
elseif deg=1 then ;eğer 1. giriş 1 ise 1.çıkısı aktif et
portb=%00010001
elseif deg=3 then ;eğer 1. ve 2. girişler 1 ise 2.çıkısı aktif et
portb=%00100011
elseif deg=7 then ;eğer 1. ve 2. ve 3. girişler 1 ise 3.çıkısı
aktif et
portb=%00110111
else
;eğer tüm girişler bunların dışıysa 8.çıkısı aktif et
portb=%10000000
endif
goto main
;basa dön
end
;bitti
Sonuç olarak kullanılan mikrodenetleyicinin sisteme
kazandırdığı özellikler;
kullanıcılar için gösterge
panosunun yanında işlevselliktir. Aspiratör modelinin
değişmesiyle meydana gelebilecek herhangi bir değişim
olduğunda yazılımın yeniden düzenlenmesi ile kolayca
uyum sağlayabilme imkânı vermiştir.
Hız Kontrol Ünitesi; Şekil 7’de görülen devre 3 adet
röleden oluşmaktadır. Tablo 1’de mikrodenetleyiciden
gelen veriler doğrultusunda röleler tetiklenmektedir. Bu
tetikler sayesinde motorun spir sayısı değişmekte
dolayısıyla hız değişmektedir. Sonuç olarak hız değişim
işlemini Hız Kontrol Ünitesi Devresi yapmaktadır.
Şekil 7 Hız Kontrol Ünitesi Devresinin Açık Şeması
I
II
II
Çıkış
0
0
1
Q1
0
1
1
Q2
1
0
1
0
1
0
Q3
Kapalı
Tablo1. Çıkış Durum Tablosu
Şekil 7’de görülen Hız Kontrol Ünitesi devresinin açık
şemasıdır. B0, B1, B2 uçları Şekil 4’de gösterilen Hız
Kontrol Ünitesi bölümündeki problara bağlanmaktadır.
Çıkışlarda Aspiratör AC Motorundan gelen kablolara
bağlanmaktadır.
6. SONUÇ
Uygulamada amacı doğrultusunda tam
aspiratör tasarlanmış ve gerçekleştirilmiştir.
otomatik
Sonuçlara bakıldığında; öncelikle nem sensörlerinin
kullanımı kolay, maliyeti yerine göre ucuz ve birçok
alanda uygulanabilir olduğu görülmüştür. Araştırmalar
sırasında karşılaşılan bir noktada nem sensörlerinin
ülkemizde üretilmemesidir. Bu sensörlerin üretimin çok
düşük maliyetle ülkemizde de yapılabilir olduğu
görülmüştür.
Anlaşılmıştır ki; nem sensörleri aspiratör kontrolünde
büyük kolaylık sağlamaktadır. Bunun yanında
uygulanılan hız kontrol devresi yerine lineer motor
kontrolü; frekans kontrol devresi ile ya da başka bir
yolla yapılarak sistem lineer hale getirilebilir. Ancak bu
seçenekler projenin ana ilkelerinden olan düşük maliyet
ilkesine terstir.
7.KAYNAKLAR
[1] http://www.nel.com.tr, (Tarih: 02-05-2005)
[2] Sülün, E.E.,Ekmekçibaşı, V.T., (2001), Herkes İçin
Elektronik, Haser, İzmir
[3] Altınbaşak, O., (2002), PicBasicPro ile PIC
Programlama, Atlaş, İstanbul