Elektronik
Metal Dedektörleri Teknik
Değerlendirme ve Örnek Bir
Modelleme Uygulaması
Serkan AKSOY
Gebze Yüksek Teknoloji Enstitüsü Elektronik Mühendisliği Bölümü
Elektromanyetik bir indüksiyon sistemi olan metal dedektörleri, çeşitli cisim ve yapıların içerisinde
bulunan metalleri tespit ve teşhis etmek amacı ile kullanılan cihazlardır. Bu çalışmada elektromanyetik
tabanlı metal cisim tespit teknolojileri genel olarak değerlendirilerek, metal tespiti için yaygın olarak
kullanılan metal dedektörlerinin avantaj ve dezavantajları hakkında teknik bilgiler verilecektir. Bu
kapsamda örnek bir senaryo üzerinden sayısal modelleme sonucu hesaplanan toplam saçılan manyetik
alanın konumsal dağılımı toprağa gömülü alüminyum bir küre için üç farklı durumda değerlendirmiştir.
veya iletken olmayan tüm cisimlere karşı tepki
Gözle görülemeyen ve/veya yanına yaklaşılamayan veren sistemlerdir. Karmaşık bir ortamda çoklu iç
yansımalar da hesaba katıldığında ve bu sistemin
cisimlerin elektromanyetik yöntemlerle tespit ve
pahalı oluşu da göz önüne alındığında sadece
teşhisi, yoğun uygulama alanı bulan ve geniş
metal cisim tespiti için bu sistemi kullanmanın
yelpazede ilerleyen önemli bir teknoloji alanını
oluşturmaktadır. Bu kapsamda özel olarak (iletken) uygun olmadığı açıktır.
Temelde manyetik veya manyetik olmayan
metal cisimlerin/ortamların tespiti için kullanılan
iletken cisimlere tepki veren ve diğer iletken
elektromanyetik temelli belli başlı sistemler
olmayan cisimlerle etkileşimi olmayan sistemler
❱❱ Elektriksel özdirenç cihazları,
elektromanyetik İndüksiyon (EMİ) sistemleridir. Bu
❱❱ Manyetometreler,
sistemler metal tespitinin yanında gerçekte çok
❱❱ Yere nüfuz eden radarlar,
geniş bir uygulama alanına sahip olduğundan,
❱❱ Elektromanyetik indüksiyon cihazları,
olmak üzere sınıflandırılabilirler. Elektriksel özdirenç metal cisim tespit ve teşhisi için kullanılan EMİ
sistemleri özel olarak “metal dedektörleri ” olarak
cihazları temelde toprak vb. bir ortamın elektrik
isimlendirilmektedirler [1]. Yine, benzer amaç için
alan dağılımı ile ilgili olarak potansiyel farkını
kullanılan ve farklı teknolojileri (akustik/sismik,
ölçtüğünden, küçük iletken cisimlerin oluşturduğu
X-Işınları vb.) bünyesinde barındıran birçok hibrit
potansiyel değişimlerini tespitte yetersiz
kalacaklardır. Manyetometreler ise dünya manyetik sistemin varlığı da unutulmamalıdır.
Metal dedektörleri, diğer sistemlere göre aşağıdaki
alanını kullanan pasif sensörler olup, iyi manyetik
temel avantajlara sahiptir:
malzemelerin tespitinde başarılıdırlar. Fakat birçok
❱
❱ Küçük/büyük iletken cisimlere yüksek hassasiyet,
iletkenin (metalin) manyetik malzeme olmadığı
diğer cisimlere karşı tepkisizlik,
bilinmektedir. Yere nüfuz eden radarlar (ground
❱❱ Düşük sistem maliyetleri (nispeten bilinen üretim
penetrating radars, GPR) yüksek frekanslarda
teknolojisi),
(MHz ve GHz bandında) kullanılan ve iletken
Temeller
230 I 3e Electrotech
Mart 2014
Elektronik
Gözle görülemeyen ve/veya yanına
yaklaşılamayan cisimlerin elektromanyetik
yöntemlerle tespit ve teşhisi, yoğun
uygulama alanı bulan ve geniş yelpazede
ilerleyen önemli bir teknoloji alanını
oluşturmaktadır.
❱❱ Kolay kullanım ve zorlu koşullar altında
sağlamlık,
❱❱ İlgili elektronik teknolojilerinde ki hızlı
ilerlemeler.
Metal dedektörleri temelde, uzak alanda çalışan
klasik radarlardan farklı olarak yakın alanda çalışan
ve alıcıda radarın aksine indüklenen akımlar yerine,
elektromotor kuvvetinin (manyetik indüksiyon alanı
ve ilgili yüzey alanı integrali üzerinden tanımlıdır)
algılandığı manyetik sensör sistemleridir. Bir çeşit
düşük frekans yer radarı olarak da düşünülebilecek
metal dedektörlerinin metal ve mayın tespitinde en
etkili teknoloji olduğu Amerikan ordu raporlarında
da vurgulanmaktadır [2]. Metal dedektörleri
denildiğinde genelde akla sadece gömülü iletken
cisimlerin tespiti gelmektedir. Bu cisimler, arasında
askeri amaçlı mayın ve patlamamış mühimmatın
tespiti ile sivil amaçlı altın, gümüş vb. tarihi eser
tabanlı değerli malzemelerin bulunması düşünülür.
Fakat bu iki yaygın uygulama yanında, metal
dedektörleri EMİ sistemleri kapsamında1
❱❱ Güvenlik uygulamaları (kapı ve el tipi
dedektörler),
❱❱ Yeraltı boru, çukur, suyolu, siper vb. tespit
sistemleri,
❱❱ Mayın tespiti ile mayından arındırma,
❱❱ Su altı tespit sistemleri (torpido, denizaltı tespiti
vb.),
❱❱ Duvar içi dinleme cihazı (böcek) tespit sistemleri,
❱❱ Duvar içi demir çubuk tespit sistemleri (inşaat
teknolojisi),
❱❱ Yemek/yiyecek endüstrisinde metal parça tespit
sistemleri,
❱❱ Batimetrik haritalama,
1 EMİ sistemleri indüksiyon ısıtma, kablosuz enerji iletimi, indüksiyon
motor (elektromanyetik fırlatıcılar) tasarımı, RFID sensörleri, düşük
frekans tıbbi görüntüleme vb. birçok ek uygulama alanına sahiptirler.
231 I 3e Electrotech
Mart 2014
❱❱ Su ve toprak kirliliği çalışmaları (atık ve çöp
sahalarının tespit ve izlenmesi),
❱❱ Tahribatsız Eddy akımları muayene yöntemleri
vb. birçok uygulamada yoğun olarak
kullanılmaktadır.
Bu kapsamda bir metal detektöründen beklenen
yetenek, aranan iletken cismin
❱❱ Yön ve derinlik dâhil pozisyonunun (yerinin)
belirlenmesi (pinpointing),
❱❱ Elektromanyetik açıdan malzeme yapısının
belirlenmesi,
❱❱ 3 boyutlu geometrisinin belirli düzeyde
görüntülenebilmesi
olarak ifade edilebilir. Tüm bunlara karşın dar
bandlı (tek frekanslı) klasik metal dedektörlerinin
temel zayıf noktaları
❱❱ Yüksek yanlış alarm (false alarm) oranları,
❱❱ Cisim teşhisi (classification, discrimination)
konusunda başarı problemleri,
❱❱ Derinlik bilgisinin kabul edilebilir doğrulukta elde
edilememesi,
❱❱ görüntüleme zorlukları,
olarak sayılabilir. Bunlar arasında en büyük
dezavantaj yüksek yanlış alarm oranlarıdır.
Toprakta gömülü diğer iletken cisimler ile toprağın
mineralli yapısı ve iletkenliği metal detektörünün
yanlış alarm vermesinin temel nedenleridir.
Tüm bu avantaj ve yaygın kullanımı ile birlikte,
klasik (dar bandlı) metal dedektörlerinin söz
konusu dezavantajlarının üstesinden gelmek için,
gelişmiş metal dedektörleri üzerinde araştırmalar
devam etmektedir. Bu sistemlerde kullanılan iki
farklı yöntem, cisimlerin
❱❱ Frekans imzalarının (frekans spektrumu)
çıkartılması [3],
❱❱ Zaman imzalarının (üstel zayıflama zaman
spektrumu) çıkartılması [4],
olarak sınıflandırabilirler. Bu yöntemlerin ilkinde
hedef cisme 1-100 KHz frekans bandındaki bir
frekans bölgesinde genelde 1 KHz aralıklarla farklı
frekanslar gönderilir. Bu nedenle bu tür sistemler
çok frekanslı metal dedektörleri (veya frekans uzayı
sistemleri) olarak bilinir. Yöntemlerin ikincisinde
ise hedef cisme genelde en fazla 10 MHz’e kadar
en yüksek frekans bileşeni olan bir darbe (pulse)
işareti gönderilir. Bu nedenle bu tür sistemler
darbe indüksiyonlu metal dedektörleri (veya zaman
uzayı sistemleri) olarak bilinir [5]. Her iki sistemde
Elektronik
de cisimden geri dönen elektromanyetik dalgalar
frekans ve/veya zaman uzayında değerlendirilir.
Böylece cismin türü, yönü, malzeme yapısı,
derinliği vb. bilgiler kapsamında teşhisi ile yüksek
yanlış alarm oranları düşürülmeye çalışılır. Yine,
gelişmiş metal dedektörlerinin monostatik ve
bistatik uygulamaları da mevcuttur. Her bir
sistemin kendine göre avantaj ve dezavantajlarının
olduğu unutulmamalıdır.
Kısa Tarihçe
İkinci Dünya Savaşı yıllarında mayın tespit
ihtiyacının karşılanması için metal dedektörlerinin
gelişimi hızlanmıştır. Bu durum, entegre devreler
kullanan, düşük güçlü ve taşınabilir dedektörlerin
üretimini 1970’li yıllar boyunca tetiklemiştir. 1980’li
yıllardan itibaren mikroişlemciler de kullanan
dedektörlerden beklenen temel yetenek iletken
cisimlerin türünü ayırt (teşhis) edebilmektir. Bu
durum işaret işleme algoritmalarının kullanılmasına
yol açmıştır. Buna göre metal dedektörlerinin
gelişimi 1990’lı yıllara kadar en genel hatları ile
aşağıdaki gibi açıklanabilir [6]:
❱❱ 2000 yıl önce: Çin imparatoru tarafından
güvenlik amaçlı kullanım (statik),
❱❱ 1881: Graham Bell›in Amerikan Başkanı
Garfield›in vücudundaki mermiyi bulma çabaları,
❱❱ 1900: Kaptan McEvoy’ın su altında metal
dedektörü ile tespit çalışmaları,
❱❱ 1915: Maxwell-köprü devresi ile bomba tespiti
çalışmaları, M. C. Gutton,
❱❱ 1922: Amerikan Standart Bürosu’nun «Induction
Balance for Detecting Metallic Bodies” terimini
kullanımı,
❱❱ 1924: Radyo dedektörü denilen ve
vurma frekans devresi ile çalışan sistemin
patentlenmesi, D.Chilson,
❱❱ 1927: İlk metal dedektörü kitabının yazılması,
R. J. Santschi,
❱❱ 1929: Metallascope (M-Scope) sisteminin
patentlenmesi, Gerhard Fisher.
II’inci dünya savaşı yılları ve mayın dedektörleri için
yüksek talep:
❱❱ 1941: Polanya kuvvetleri tarafından yeni ve
avantajlı bir sistemin geliştirilmesi,
❱❱ 1942: Frekans modülasyonlu dedektörlerin
tanıtılması,
❱❱ 1987: İlk mikroişlemcili metal dedektörünün
232 I 3e Electrotech
Mart 2014
patentlenmesi, Garrett Electronics,
❱❱ 1987: İlk otomatik toprak ayarı yetenekli altın
dedektörü, MineLab (GT16000).
1990’lı yıllardan sonra konu ile ilgili çok fazla
çalışma, patent ve model üretildiğinden detaya
girilmemiştir [1], [6].
Halka Antenler
Metal detektörlerinde verici (Tx) ve alıcı (Rx) anten
olarak halka (loop) antenler ve onların değişik
konfigürasyonları kullanılır. Bu kapsamda yaygın
olarak kullanılan bazı halka anten türleri aşağıda
gösterilmiştir [7].
Şekil 1. a) Çift D, b) Ortak merkezli, c) Çoklu halka halka
antenler.
Özel olarak örneğin Çift-D türü halka antenler
daha fazla derinlik, daha geniş arama alanı vb.
avantajlara sahiptir. Gelişmiş metal dedektörleri
geniş bantlı sistemler olduğundan, halka antenlerin
ilgili frekans bandında çalışma performansı
bakımından analiz edilmesi zorunludur. Bu
kapsamda maksimum güç teoremi gereği,
bu antenlerin kaynak (osilatör) ile empedans
uyumluluğu (matching) konusuna dikkat
edilmelidir. Yine antenlerin rezonans veya
rezonansta olmayan durumlarda yakın alan
davranışlarının da bilinmesi gerekir. Antenlerin
tasarımında ki önemli bir diğer nokta ise alıcı
antenin vericiden etkilenmeyecek şekilde
tasarlanması gerekliliğidir. Yani, hedef cisim yok
iken alıcı antende indüklenen akımların minimum
olması sağlanmalıdır. Bu durum önemlidir
ziya alıcıdaki işaretin genliği zaten son derece
düşük olacağından, alıcıda ön kuvvetlendirici
(preamplifier) kullanımını zorunlu kılar. Her bir
frekansta geniş bandlı sistemlerde anten faktörü
de düşünülmesi zorunlu bir diğer parametredir.
Ek olarak halka antenler mutlak (absolute), farksal
(differential) ve çoklu-farksal (multi-differential)
modda çalışacak şekilde de tasarlanabilirler. Bu
durum saçılan alanın tümü ile pozitif veya pozitif/
Elektronik
Temelde manyetik veya manyetik olmayan
iletken cisimlere tepki veren ve diğer iletken
olmayan cisimlerle etkileşimi olmayan
sistemler elektromanyetik İndüksiyon (EMİ)
sistemleridir. Bu sistemler metal tespitinin
yanında gerçekte çok geniş bir uygulama
alanına sahip olduğundan, metal cisim
tespit ve teşhisi için kullanılan EMİ sistemleri
özel olarak “metal dedektörleri ” olarak
isimlendirilmektedirler.
manyetik veya manyetik olmayan cisimler belirli
başarı ile ayırt edilebilmektedir.
Teşhis (Classification or Identification)
Algoritmaları
İletken cisimlerin metal dedektörleri ile tespiti
prensip olarak mümkün olmakla birlikte, teşhisi
(ayırt edilmesi, sınıflandırılması) konusunda
büyük zorluklar mevcuttur. Klasik tek frekanslı
birçok ticari sistemde bu amaç için kullanılan
ardışık karşılaştırıcı (comparator) devreler veya
temel tespit algoritmaları ile bu sorun aşılmaya
çalışılmakla beraber, yetersiz kalacağı aşikârdır.
Bu durumun yanlış alarm oranlarını çok artıracağı
negatif bileşenlerinin var olması bakımından önemli da unutulmamalıdır. Bu kapsamda daha önce
bahsedildiği üzere frekans veya zaman uzayı
olup, tespit açısından faydalı olabilmektedir [5].
Özel olarak halka anten dâhil tüm metal dedektörü sistemleri adı verilen Gelişmiş Metal Dedektör
sistemleri önerilmiştir. Bu dedektörler ile cisimlerin
sisteminin kararlılığı konusunda da incelemeler
teşhisi için
yapılmıştır. Bu durum öncelikle günün farklı
zamanlarında (gündüz, gece vb.) ortam sıcaklığının ❱❱ Empedans düzlemi gösterilimi,
❱❱ Faz açısı değişimi gösterilimi,
tüm sistem üzerinde kararsız davranışlar
❱❱ Spektral imzaların (frekans/zaman imzası vb.)
oluşturması bakımından önemlidir.
gösterilimi,
❱
❱
Rezistif, indüktif ve çapraz geçiş bölgelerinde
Toprak ve Manyetik Dispersif Etkisi
çalıştırma,
Metal dedektörleri prensip olarak her türlü
❱❱ Konumsal ve zamansal alan dağılımı tabanlı I/Q
ortamda (toprakta) çalışabilmelidirler. Fakat çoğu
işaret dağılımı gösterilimler,
toprak ve malzeme (ırmak kumu vb.) yapısında
❱
❱
Farklı yüksekliklerden zengin veri toplanarak
bulundurdukları mineraller nedeni ile manyetik
değerlendirilmesi
dispersif özellik gösterir. Yani 1-100 KHz bandında
vb. çeşitli yöntemler üzerinde çalışılmıştır. Yine
farklı frekanslarda farklı manyetik geçirgenlik
problemin bir ters problem (inverse problem)
( , H/m) değerlerine sahiptirler. Bir diğer
olarak değerlendirilmesi ile
deyişle manyetik geçirgenlikleri frekansa ( , Hz)
❱❱ Alt uzay izdüşümü yöntemi,
bağlıdır (
[8]. Bu durum dedektörün
❱❱ Minimum karesel hata tersleme algoritması,
performansını ciddi anlamda etkileyerek, yanlış
❱❱ Güç yoğunluğu dağılımına dayalı
alarm oranlarını yükselten en önemli unsurdur.
periyodogramlar,
Buna karşın manuel veya otomatik toprak ayarına
❱❱ İstatistiksel tespit algoritmaları,
(ground balancing) sahip sistemler belirli düzeyde
❱❱ Çeşitli çıkartım (substraction) algoritmaları
başarılıdır. Bu nedenle toprak türüne bağlı
vb.
çeşitli yöntemler teşhis amaçlı uygulanmaktadır.
olmak üzere havadaki bir cismin tespit başarımı
ile, toprakta gömülü bir cismin tespiti başarımı
Çözünürlük
temelde birbirinden farklı değerlendirilmelidir.
Çözünürlük yan yana (genelde yatay duran)
gömülü iki cismin metal dedektörü ile ayırt
Tespit (Detection) Algoritmaları
Manyetik veya manyetik olmayan iletken cisimlerin edilebilme yeteneği olarak düşünülebilir. Metal
dedektörlerinde bu yetenek frekans, halka antenin
metal dedektörleri ile tespiti belirli derinlik kısıtları
boyu, ortamın kayıp düzeyi, gömülü cisimlerin
altında çoğu kez mümkündür. Alınan işaretlerde
büyüklükleri, malzeme yapısı ve gömülme
gömülü iletken cisimler nedeni ile oluşan pozitif
ve/veya negatif faz kaymalarından yararlanarak
derinlikleri/yönü, sistemin monostatik veya
233 I 3e Electrotech
Mart 2014
Elektronik
bistatik olması durumu vb. birçok parametreye
bağlıdır. Yine, gömülü manyetik malzemelerin
çevrelerinde oluşturduğu manyetik ekranlama
(gölgeleme) nedeni ile çözünürlük önemli oranda
düşmektedir. Prensip olarak daha büyük halka
antenler daha düşük çözünürlük vermekle beraber,
daha derinlerde tespit yapabilme imkânı sağlarlar.
Yine daha yüksek frekanslarda daha iyi çözünürlük
beklenir, ancak etkin arama derinliği azalır.
Görüntüleme
Metal dedektörleri ile belli çözünürlük ve kalitede
görüntüleme yapmak mümkündür. Fakat bu
durum düzgün veri toplamayı gerektirdiğinden
gerçek uygulamalarda çoğu kez zordur.
Bununla birlikte özellikle mayınların, patlamamış
mühimmatların ve duvar içi demir çubukların vb.
cisimlerin görüntülenmesi konusunda çalışmalar
mevcuttur [9]. Yine araca monteli gelişmiş askeri
dedektörlerde de gerçek zamanlı görüntüleme
önemli bir ihtiyaçtır. Bu sistemlerde dizi halka
antenlerin kullanıldığı unutulmamalıdır.
Modelleme ve Simülasyon
Elektromanyetik sistemlerin geliştirilmesi için
modelleme ve simülasyon desteği şarttır. Bir metal
dedektörü sisteminin modellenmesi temelde “eş
değer (skaler) devre modeli” veya “elektromanyetik
(vektörel) modeli” üzerinden yapılabilir. İlk model
akım ve gerilimler üzerinden sistemin eş değer
empedansının bulunması üzerine kurulu olup, ortak
(mutual) indüktans hesabını gerektirmektedir.
İkinci model ise Maxwell denklemlerinin analitik
veya nümerik (sayısal) çözümüne dayalıdır. Bu
modelde gerçek bir metal dedektörü probleminin
tam analitik çözümü genellikle mevcut değildir
ya da pratik açıdan yetersiz olabilecek birçok
varsayım ve yaklaşıma dayalıdır. Bunun temel
nedeni problemin yakın alanda, düşük frekanslarda
(kuvazi-statik durumda) ve dispersif toprak için
çözülmesinin gerekliliğidir.
Yine, Maxwell denklemleri tabanlı gerçek
hayat problemlerini çözmek için gerekli sayısal
çözümlerinin düşük frekanslarda yaygın olmaması
nedeni ile metal dedektörü için nümerik (sayısal)
simülasyonlar da son derece azdır. Bu durum
indüksiyon olayının ve etkilerinin yeterince
anlaşılamamasına ve bu nedenle sistemlerin
234 I 3e Electrotech
Mart 2014
istenilen düzeyde geliştirilememesine neden
olmaktadır. Daha önce belirtildiği üzere gerçek
problemlerde toprağın manyetik dispersif etkisinin
hesaba katılması zorunluluğu, simülasyonları bir
kat daha zorlaştırmaktadır. Bu durum gelişmiş
metal dedektörü sistemlerinin belirli bir başarı
ile üretilebilmesi açısından büyük bir dezavantaj
oluşmaktadır.
Örnek Uygulama
Bu bölümde verilen sonuçlar yazarın yönetimi
altında M. Burak Özakın tarafından yapılan bir
yüksek lisans tezi kapsamında elde edilmiştir [10].
Buna göre metal dedektörü problemi Kuasi-Statik
Zaman Uzayı Sonlu Farklar (Finite Difference
Time Domain) yöntemi ile üç boyutlu kartezyen
koordinatlarda ve Maxwell denklemlerinin çözümü
kapsamında incelenmiştir. Şekil 2’de gösterilen
problem uzayı hava/kayıplı toprak arayüzü ve
halka antenden oluşmakta olup, çalışma frekansı
10 KHz’dir.
Şekil 2. Problem uzayının genel görünümü.
Çözüm, temelde quasi-statik koşulun (
) sağlanması üzerine kuruludur. Burada
(rad/
sn) açısal çalışma frekansını, (F/m) cismin veya
(S/m) ise cismin
ortamın dielektrik sabitini ve
veya ortamın iletkenliğini göstermektedir. Tüm
problem uzayının manyetik olmayan ortam ve
). Bu
cisimlerden oluştuğu kabul edilmiştir (
kapsamda sistem monostatik (alıcı ve verici anten
aynı yerde) düşünülmüş ve alüminyum küp, küre ve
prizma şeklindeki gömülü cisimler için konuma bağlı
saçılan manyetik alan dağılımları hesaplanmıştır.
Bir iletken olan alüminyumun manyetik olmayan
Elektronik
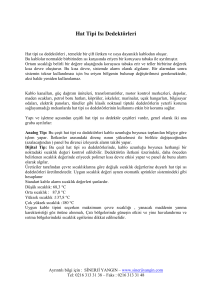
a) farklı anten çapları,
b) farklı anten yükseklikleri,
c) farklı cisim derinlikleri,
Şekil 3. 10 KHz’de gömülü alüminyum bir küreden saçılan toplam manyetik alanın yatay menzile göre üç farklı parametre
açısından değişimi.
malzeme olduğu unutulmamalıdır. Saçılan manyetik
alanlar özel olarak dairesel halka antenin üç
farklı yüksekliği (h), üç farklı anten çapı (a) ve üç
farklı derinliği (d) için hesaplanmıştır. Buradaki
sonuçlar sadece iletken alüminyum küre için
Şekil 3’te gösterilmiştir. Şekillerdeki dikey çizgiler
(kırmızı renkli) cismin bulunduğu yatay menzili
göstermektedir.
Sonuçlara göre anten çapı artıkça saçılan alanın
genliği artarak, cismin tespiti bakımından
karakteri daha çok belirginleşmektedir. Buna
karşın anten yüksekliğinin artması ve cismin
daha derinlere gömülmesi durumunda saçılan
alanın genliği ve karakteri bakımından tam ters
bir etki söz konusudur. Elde edilen bu sonuçlar
iletken cisimlerin tespiti/teşhisi ve sistem tasarımı
kapsamında başarım açısından son derece
önemlidirler.
Kaynaklar
[1] Aksoy S., (2014), Advanced Metal Detectors, E-Book,
http://anibal.gyte.edu.tr/dosya/102/~saksoy.
[2] Patel D., Desert storm soil properties and mine
detectors, Technical Report USA-BRDEC-TR #2537, Fort
Belvoir, Unclassified, 80 pages plus appendices, 1993.
235 I 3e Electrotech
Mart 2014
[3] Svatos J., Vedral J., The usage of frequency swept
signals for metal detection, IEEE Trans. on Magnetics,
48-4, 1501-1504, 2012.
[4] Nelson C. V., Keller M. R., Wide-bandwidth time decay
signatures from UXO targets, Proc. SPIE 4742, Detection
and Remediation Technologies for Mines and Minelike
Targets VII, 756-765, 2002.
[5] Ewald H., Electromagnetic Induction, Chapter 4 in
Subsurface Sensing, 175-224, Editors: A. S. Türk, K.
Hocaoğlu, A. A. Vertiy, John Wiley & Sons Inc., Hoboken,
New Jersey, USA, 2011.
[6] Roberts R. T., The history of metal detectors, Western
& Eastern Treasures, 1999.
[7] Szyngiera P., (1999), A method of metal object
identification by electromagnetic mean, Mine Identification
Novelties Euroconference, 155-160, Florence, Italy.
[8] Das Y., Effects of soil electromagnetic properties on
metal detectors, IEEE Trans. on Geoscience and Remote
Sensing, 44-6, 1444-1453, 2006.
[9] Bruschini C., Evaluation of a commercial visualizing
metal detector for UXO-mine detection - HILTI ferroscan
system, International Workshop on Sustainable
Humanitarian Demining (SusDem 97) , 6.18-6.27, Zagrep,
Crotaria, 1997.
[10] Özakın M. B., Aksoy S., Üç boyutlu Kartezyen
koordinatlarda düşük ve tek frekanslı metal dedektörlerinin
kuvazi-statik zaman uzayı sonlu farklar yöntemi ile
benzetimi, 6. URSI Ulusal Bilim Kongresi, 2-5 Eylül 2012,
Doğuş Üniversitesi, İstanbul, TÜRKİYE.