GENEL FİZİK I
DERS NOTLARI
Hazırlayanlar:
Prof. Dr. Mustafa POLAT
Prof. Dr. Leyla TATAR YILDIRIM
2012
BÖLÜM-1
Ölçme
M
I
R
I
D
L
I
Y
Bu bölüm kapsamında aşağıdaki başlıklar üzerinde
durulacaktır:
A
L
Y
E
L
.
Bir fiziksel niceliğin
ğ
ölçülmesi
ç
R
D
e
v
Birimler,Tbirim sistemleri
A
L
O
Mekanikte
temel birimler
P
A
F
A
Birim dönüşümleri
T
S
U
M
Ölçümlerdeki duyarlılık
.
R
D
(1-1)
Ölçme: miktar belirleme işlemidir.
Fizikte, nicelikleri ölçmek için birtakım deneyler yapar ve ölçülen
Fizikte
M
I
nicelikler arasında bir bağ kurmaya çalışırız. Bu bağlar Igenellikle
R
D
matematiksel eşitlikler yoluyla ifade edilir.
edilir
L
I
Y
A
L
Buna en iyi örnek Ohm Yasası
Yasası’ dır.
dır Bu yasanın
özü bir iletkenin iki
özü,
Y
ucu arasına uygulanan potansiyel fark L
ileE iletken üzerinden akan
.
elektrik akımının ölçülmesi esasına dayanır.
R
D
e
v
Uygulanan potansiyel fark (V) ile elektrik akımı (I) arasındaki ilişki
T
A
çizgiseldir ve aşağıdaki L
matematiksel
form ile verilir
O
P
A
V AF
R T Constant
sabit
I
S
U
M
.
Bu eşitlik “Ohm
Ohm Yasası
Yasası” olarak bilinir
bilinir.
R
D
Eşitlikteki R, iletkenin “direnci” dir.
(1-2)
Birimler: Fiziksel bir büyüklüğü tam olarak tanımlayabilmek için o
büyüklüğün nasıl ölçüleceğini bir kurala bağlamak ve bir birim ile ifade
etmek gerekir. Böylece büyüklükleri bir standarda bağlamış oluruz.
M
I
R
D
I
D
L
I
Y
Temel Büyüklükler: Büyüklüklerin tümü birbirinden
bağımsız değildir.
A
Bazı büyüklükler temel büyüklük,
büyüklük diğerleri ise Y
buLtemel büyüklüklerden
E
türetilmiş büyüklüklerdir.
L
.
R
D
Temel büyüklükler için bir standart
saptanır ve diğer büyüklükler
e
v
temel büyüklükler cinsinden birimlendirilir.
T
A
L
O
Temel büyüklüklerinPbelirlenmesi
amacı ile, 1875 yılında kurulan ve
A
halen Paris’teFbulunan
Uluslararası Ağırlık ve Ölçmeler Bürosu
A
(IBWM S
=T
International Bureau of Weights and Measurements) 1971
U
yılında
bir toplantı yapmış ve Tablo 1’de verilmiş olan 7 büyüklüğü temel
M
.
R
bü üklük olarak
büyüklük
l k seçmiştir.
i ti
(1-3)
Bu 7 büyüklük uluslararası birim sistemini
(The International Systems of Units = SI) oluşturur.
Tablo 1. SI temel büyüklükleri
Büyüklük
Adı
Uzunluk
Metre
Kütle
.
KilogramDR
e
Saniye
v
T
A
Amper
A
Zaman
El kt ik k
Elektrik akımı
L
Sıcaklık
O
P
Madde
dd A
miktarı
k
F
A
Işık şiddeti
T
S
M
I
R
I
D
L
YI
A
L
Sembolü
Y
LEm
kg
s
A
Kelvin
K
Moll
moll
Kandela
Cd
R
D
U
. MMekanikte sadece üç tane niceliğe ihtiyaç duyulur.
Bunlar uzunluk, zaman ve kütledir.
(1-4)
Metre:
M
I
Başlangıçta metre, kuzey kutbu ile ekvator arasındaki
R
I
D
mesafenin on
on-milyonda
milyonda biri olarak tanımlanmıştır
(1792).
(1792)
L
YI
A
AB
L
1m
; (R
6370 km)
km)
Y
10
E
L
.
P tik nedenlerden
Pratik
d l dDR ötürü
ötü ü daha
d h
sonra metre,
t
e yapılmış standart bir ölçüm çubuğu
platin-iridyumdan
v
T
üzerindeki
iki çizgi arasındaki mesafe olarak
A
L
tanımlanmıştır.
O
P
A
F
7
R
D
S
U
.M
A
T
Dünya
1983’ ten beri metre, 1/299792458 s’ lik zaman
aralığında ışığın boşlukta aldığı yol olarak
tanımlanmıştır. Bu yeni tanımın sebebi, ışık hızının çok
hassas bir şekilde ölçülebiliyor olmasıdır.
olmasıdır
(1-5)
Saniye:
M
I
R
Başlangıçta saniye, Dünya’nın kendi ekseni etrafındaki tam bir dönüş
süresinin (24x60x60)’ ta biri olarak aşağıdaki gibi tanımlanmıştır.
1
1 saniye
24 60 60
A
L
Y
LE
I
D
L
YI
D
.
R
B tanımdaki
Bu
t
d ki problem,
bl
şekilde
kild
D
gösterildiği gibi, bir günlükve
sürenin sabit olmayışıdır.
olmayışıdır AT
L
O
P
A
F
A
T
S
U
M
Bu nedenle 1967’ den beri saniye, Cessium-133 elementinin yaydığı
.
R
bbelli
lli bir
bi ddalga-boyundaki
l b
d ki ışığın
ğ 9192631770 tit
titreşimi
i i için
i i geçen süre
ü
olarak tanımlanmaktadır.
(1-6)
Kilogram:
M
I
R
I
D
L
YI
SI birim sisteminde kütle standardı olan bir p
platin-iridyum
y
silindir aşağıda
ş ğ
verilmiştir.
.
R
D
e
A
F
R
D
S
U
.M
A
L
O
P
A
L
Y
LE
v
T
A
T
Bu silindirin
B
ili di i kütlesi
kü l i 1 kilogram
kil
olarak
l k kabul
k b l edilmiş
dil i ve Paris’
P i ’ teki
ki
Uluslararası Kütle Ölçüm Bürosu’ nda tutulmaktadır. Hassas kopyaları
da başka ülkelere gönderilmiştir.
gönderilmiştir
(1-7)
Birimdönüştürme:
Birim
dönüştürme:
M
I
R
I
D
Çoğu zaman fiziksel niceliklerin birimlerini değiştirmeye ihtiyaç
duyarız.
duyarız
Bunu
L
I
Y
yapmak için, iki birim arasındaki dönüşüm faktörünü bilmemiz
gerekir.
A
L
Y
E
L
.
Örnek: karayolu
y hız limiti olan 65 mil/saat'
i m/s cinsinden ifade ediniz.
R
D
1 mil = 1609 m ve 1 saat = 3600es
v
T
A
Bu durumda,
L
O
P
A
mil A
m
F 1609 m
65x
29
65
T
S
saat
3600 s
s
U
M
.
R
D bulunur. Bu hız limitini km/sa cinsinden bulunuz.
(1-8)
Ölçümlerdeki Duyarlılık :
M
I
R
I
D
L
YI
Belli bir nicelik, örneğin bir cismin uzunluğu L, değişik duyarlılıklarda belirlenebilir.
Duyarlılık ölçüm yöntemine ve ölçüm aletine bağlıdır.
A
L
En küçük ölçeği 1 mm olan bir cetvel ile ölçüm yapıyorsak
L uzunluğunu,
uzunluğunu
Y
E
L = 1.234 m şeklinde vermek gerekir.
L
.
R
Yani L uzunluğu
nl ğ dört anlamlı sa
sayıı ile verilmelid
erilmelid
ir.
D
e
v
Cetvel üzerindeki en küçük T
ölçek 1 mm olduğundan,
olduğundan
A
L
L' yi L = 1.2346 m biçiminde
vermek anlamsız olacaktır.
O
P
A
Diğer taraftan, duyarlılığı
0.1 mm olan verniyeli kumpas kullanıyorsak,
F
A
Tşşeklinde verilebilir ve bu durumda beşş anlamlı sayıy ile ifade edilir.
L = 1.2346 m
S
U
M nicelikteki anlamlı sayı, hesaplamalarda kullanılan niceliklerin anlamlı
Hesaplanan
.
R
D sayılarından fazla olamaz.
(1-9)
Örnek: Sabit v hızıyla hareket eden bir araç
d = 123 m' lik yolu t = 7.89
7 89 s' de alıyor.
alıyor
I
D
L
YI
Aracın hızını bulunuz.
Aracın hızı :
M
I
R
d
123 m
A m/s
v=
=
=15.5893536
L
Y
t
77.89
89 s
E
L
.
R
v' yii if
ifade
d etmek
k için
i i dokuz
d k rakam
k D kullanmak
k ll
k anlamlı
l l değildir.
d ildi
e
v
Çünkü, v' nin hesaplanmasında
kullanılan d ve t nicelikleri
T
A
sadece üç anlamlı sayıLile verilmiştir.
O
P
A
F
A
Dolayısıyla
v' de üç anlamlı sayı içerecek şekilde verilmelidir:
T
S
U
M
.
R v = 15.6 m/s.
D
(1-10)
Birimlerin alt ve üst katları: Bazı büyüklükler aynı birim ile ifade edildiği halde
sayısal değerleri birbirinden çok farklı olabilir. Örneğin, bir atomun yarıçapı ile
Dü ’ nın yarıçapı metre
Dünya’
t olarak
l k ifade
if d edilir,
dili ancakk sayısall değerleri
d ğ l i çokk farklıdır.
f kl d
Bu nedenle SI birimlerin alt ve üst katlarını gösteren işaretler kullanılır.
M
I
R
Faktör
1024
1021
1018
1015
1012
109
106
103
102
101
10-1
10-22
10-3
10-6
10-99
10-12
10-15
18
10-18
10-21
10-24
A
F
R
D
S
U
.M
A
T
İsim
Yotta
Zetta
Exa
Peta
Tera
Giga
Mega
Kilo
H t
Hecto
Deka
Deci
C ti
Centi
Milli
Micro
N
Nano
Pico
Femto
Att
Atto
Zepto
Yocto
A
L
O
P
Sembol
Y
Z
E
P
T
G
M
k
h
da
d
c
m
m
n
p
f
a
z
y
v
T
R
D
e
I
Günlük dildeki adı LD
Günlük dildeki adı
I
1 septilyonY
1 sekstilyon
A
L
1Y
kentilyon
E1 katrilyon
L
. 1 trilyon
1 milyar
1 milyon
bin
yüz
ü
on
onda bir
yüzde
ü d bir
bi
binde bir
milyonda bir
milyarda
il d bir
bi
trilyonda bir
katrilyonda bir
k til
kentilyonda
d bir
bi
sekstilyonda bir
septilyonda bir
(1-11)
Bazı Ölçme Aletleri
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
M
I
R
I
D
L
YI
v
T
A
T
R
D
(1-12)
M
I
R
Cetvel
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(1-13)
Verniyeli
y Kumpas
p
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
M
I
R
I
D
L
YI
v
T
A
T
R
D
(1-14)
M
I
R
Mikrometre
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(1-15)
BÖLÜM-2
V ktö l
Vektörler
M
I
R
I
Fizikte sadece büyüklükleri
y
ile tanımlanan niceliklereD “skaler”
L
I
nicelikler diyoruz. Sıcaklık, kütle, enerji bunlardan bazılarıdır.
Y
A
L
Büyüklük yanında ayrıca yön bilgisi içeren veya gerektiren
diğer fiziksel
Y
niceliklere ise “vektörel” nicelikler diyoruz. Yer-değiştirme,
hız, ivme, kuvvet
E
L
.
bunlardan bazılarıdır.
R
D
Bu bölüm kapsamında, aşağıdaki
konulara
değineceğiz:
e
v
T
Atoplama ve çıkarma işlemi
Vektörleri geometrik
L
O
Vektörleri bileşenlerine
ayırma
P
A
Birim vektör
notasyonu
F
A
Bileşenler
yardımıyla toplama ve çıkarma
T
S
U
Bir
vektörün bir skaler ile çarpılması
Mİki vektörün skaler (dot veya nokta) çarpımı
.
R
D
İki vektörün vektörel (cross) çarpımı
(2-1)
Bir vektörün üç elemanı vardır.
M
I
R
I
D
L
YI
A
L
Uygulama Noktası (başlangıç noktası):EYVektörel büyüklüğün
L başlangıç noktası denir.
uygulandığı noktaya uygulama ya da
.
R
Yukarıdaki
k d ki vektörün
k
uygulama
l
noktası
k D O noktasıdır.
k d
e
v
Büyüklüğü:
y
ğ Vektörün sayısal
y T değerine
ğ
o vektörün büyüklüğü
y
ğ denir.
A
L
Şekilde verilen a vektörünün
büyüklüğü a AB' dir.
O
P
A
Yönü:VektörelFbüyüklüğün
yönü, doğru parçasının ucuna konulan
A
T
okun yönündedir.
Şekildeki a vekötürnün yönü O
O' dan A' ya yöneliktir
S
U
veya
doğu yönündedir.
M
.
R
D
(2-2)
A noktasından B noktasına hareket eden bir cismin yer
yer-değiştirme
değiştirme
vektörü A noktasından B noktasına çizilen bir okla gösterilir.
M
I
R
I
D
Ok n uzunluğu
Okun
nl ğ yer-değiştirmenin
er değiştirmenin büyüklüğü
bü üklüğü ile
orantılıdır
orantılıdır.
L
I
Y
Okun yönü ise yer-değiştirmenin yönü ile
ilgilidir.
A
L
Y
Şekilde A dan B ye, A' den B' ne
ve A'' nden B'' ne çizilen
E
L aynıdır.
vektörlerin büyüklükleri ve yönleri
.
R
D
Vektörler, büyüklükleri
ve doğrultuları değiştirilmeden
e
v
istenildiği gibi kaydırılabilir.
T
A
L
Kitaplarda
vektörler sembolik olarak iki şekilde gösterilir:
O
P
A (niceliğin
üzerine bir ok çizilir)
Fa
R
D
S
U
.M
A
T
a
( i lik koyu
(nicelik
k
yazılır)
l )
Vektörün büyüklüğü de
a
veya
a biçiminde sembolize edilir.
(2-3)
Vektör işlemleri
M
I
R
• Vektörlerin Eşitliği
• Bir Vektörün Negatifi
• Vektörün Taşınması
A
L
Y
LE
I
D
L
YI
.
R
• Vektörlerin ToplanmasıD
e
v
• Vektörlerin Çıkarılması
T
A
L
O
• Vektörün
P Bileşenlerine Ayrılması
A
F
• Vektörün
Büyüklüğünün Bulunması
A
T
R
D
S
• Vektörün
V ktö ü bi
bir eksenle
k l yaptığı
t ğ açının bulunması
b l
U
. M • Vektörlerin bileşenleri
ş
cinsinden toplanması
p
devam
(2-4)
Vektör işlemleri
• Vektörlerin Çarpılması:
1. Bir Vektörün Bir Skaler ile ÇarpılmasıA
.
R
M
I
R
I
D
L
YI
L
Y
2. İki Vektörün Skaler (dot veya nokta
çarpım) Çarpılması
E
L
.
R
3 İki Vektörün Vektörel Çarpılması
3.
D
e
v
T
A Bölünmesi
L
• Vektörlerin Skalere
O
P
• VEKTÖRAVEKTÖRE BÖLÜNMEZ !!!
F
A
T
S
U
M
D
(2-5)
Vektörlerde Geometrik Toplama :
M
I
R
I
D
L
YI
s aA b
L
Y
LE
R.
b vektörünün
ktö ü ü bbaşlangıç
l
noktası
kt Da vektörünün
ktö ü ü
e
v
ucuna gelecek şekilde b Tvektörü kaydırılır.
A
L
a vektörünün başlangıç
noktasından b vektörünün
O
P
uç noktasına
k
çizilen
iAil vektör
k s vektörüdür.
k
d
F
A
T
R
D
S
İ vektör
İki
arasındaki açı olmak üzere, s vektörünün büyüklüğü,
U
. Ms =a +b +2abcos
2
2
2
ile verilir (kosinüs teoremi).
(2-6)
Vektörlerde Geometrik Toplama :
M
I
RB
A
A
R=A+B=?
.
R
D
e
B
A
B
S
U
.M
C
A
T
A
F
A
L
O
P
D
A
L
Y
LE
I
D
L
YI
R=A+B
v
T
C
R=A+B+C+D=?
D
B
A
R=A+B+C+D
R
A+B+C+D
R
D
(2-7)
Vektörel top
toplama
lama işleminin
"değişme özelliği" vardır:
a b b a
.
R
D
e
M
I
R
A
L
Y
LE
I
D
L
YI
b vektörünün negatifi (-b ), v
T
A
b vektörü ile aynı büyüklükte
L
O
fakat ters yöndedir.P
A
F
S
U
.M
A
T
R
D
(2-8)
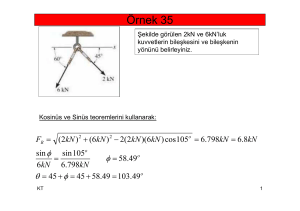
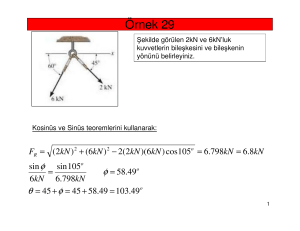
Örnek : Kuzeye
y doğru
ğ yyönelmişş 20 km' lik bir vektör ile 60o
M
I
kuzey-batıya doğru yönelmiş 35 km' lik vektörün bileşkesini bulunuz.
IR
D
L
YI
İki vektör arasındaki açı 60 o ' dir.
A
L
Y
Kosinüs teoremine göre bileşke vektörün büyüklüğü,
E
s a 2 +b 2 +2abcos
L
.
R
D
e
v
T
o
A
20
+
35
+2
20
35
cos
60
L
2
2
= 48.2
48 2 km
A
F
O
P
A
T
sin
i Usin
iS
b
35
sin sin
sin(120 ) 0.629
48.2
bM s
s
.
R
38.9o
D
(2-9)
Vektörlerde Geometrik Çıkarma:
M
I
R
d a b
I
D
L
YI
A
L
d a b a b Y
biçiminde yazılabilir.
yazılabilir
E
A
F
L
.
R
D
b vektöründen
b vektörü bulunur ve a vektörü
e
v
ile toplanır.
pT
A
L
O
P
A
T
Not: U
N
VSk ö l i bileşenleri
Vektörleri
bil
l i vasıtasıyla
l toplamak
l
k veya çıkarmak
k
k
mümkündür.
Uygulamada bu yöntem çok daha kullanışlı ve kolaydır.
.M
R
D
(2-10)
Vektörlerde Geometrik Çıkarma:
-B
A
R=A-B=?
.
R
D
e
B
LA
A
S
U
.M
R=A-B
B
C
A
T
A
F
O
P
A
L
Y
LE
v
T
R=A-B+C=?
R
AB C ?
M
I
R
I
D
L
AYI
B
B
R=A-B+C
A
C
-B
R
D
(2-11)
Vektörün bileşenleri ve bir eksenle yaptığı açı:
Bir
i vektörün
k
bi
bir eksen
k
yönündeki
d ki bil
bileşeni,
i vektörün
k
o eksen
k IM
R
I
ğ ax , a vektörünün xD- ekseni
üzerindeki izdüşümüdür. Örneğin
L
I
Y
üzerindeki izdüşümüdür. Vektörün ax bileşeni, başlangıç
ve uç
A
L
noktalarından x - eksenine çizilen dikmeler
mesafedir
Yarası mesafedir.
E
L
.
a vektörünün x- ve y-bileşenleri
R
D
ax a cos ve
e ay a sin .
v
eşitlikleri ileTverilir.
A
L
a O
ve a bileşenleri biliniyorsa, vektörün büyüklüğü
P
x
y
A
F ve sırasıyla x ve y ekseni ile yaptığı açı bulunabilir.
R
D
S
U
.M
A
T
ABC di
dikk üçgeninden:
2
x
a a a
2
y
olarak bulunur.
ve tan x
ay
ax
; tan y
ax
ay
(2-12)
Birim vektörler :
Herhangi bir doğrultuda,
doğrultuda büyüklüğü "1"
1 olan vektöre "birim vektör " denir.
denir
M
I
R
Birimsizdir ve sadece sadece yön göstermek
amacıyla kullanılır.
A
L
x, y ve z - eksenleri yönündeki birim vektörler,
vektörler
Y
E
L
ˆ
ˆ
ˆ
sırasıyla, i , j ve k ile gösterilirler.
.
R
D
e
v
Tüm vektörler birim vektörler cinsinden yazılabilir.
T
A
ˆ
ˆ
Şekildeki vektörler: a aLi a j ; b b ˆi b ˆj
O
P
A
birim vektörler:
a ve b yönündeki
F
A
a ˆT b
ˆa = ; S
b=
ile verilir.
verilir
U
a
b
M
.
Bu durumda a ve b vektörleri,,
R
D
x
y
a aaˆ ; b bbˆ biçiminde de yazılabilir.
x
I
D
L
YI
y
(2-13)
Bileşenleri Yardımıyla Vektörlerin Toplanması:
M
I
R
I
D
ˆ
ˆ
L
a a x i a y j
YI
r a
b ?
A
L
b bx ˆi by ˆj
Y
. LE
rR ax bx ˆi a y by ˆj
D
e
v
T
Bileşenleri Yardımıyla A
Vektörlerin Çıkarılması:
.
R
OL ˆ
aP ax i a y ˆj
A
d a b ?
F
A
ˆi b ˆj
b
b
T
x
y
S
ˆi a b ˆj
U
d
a
b
x
x
y
y
M
D
(2-14)
Örnek : Bir cisim üç ardışık yer-değiştirme yapıyor. Bunlar sırasıyla,
M
I
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ cm
d1 = 15i + 30j+12k cm, d 2 = 23i 14 j 5k cm ve d3 = 13i
+
15j
R
I
D
L
olduğuna
ld ğ
göre,
ö toplam
t l yer-değiştirme
d ği ti
vektörünün
ktö ü ü bileşenlerini
bil I l i i ve
Y
A
büyüklüğünü bulunuz.
L
Y
E
L
.
R d1 d 2 d3 15 23 13 ˆi + 30
14 +15 ˆj + 12 5 kˆ
R
D
ˆ
ˆ
ˆ
e
= 25i + 31j + 7k cm
v
T
A
L
O
Rx 25 cm ; RP
y 31 cm ; Rz 7 cm
A
F
A
T
S
2
2
2
U
2
2
2
RM
Rx + Ry + Rz 25 31 7 40.4 cm
.
R
D
(2-15)
Örnek: A şehri B şehrinin 46 km batı ve 35 km güneyinde yer
almaktadır Bu iki şehir arasındaki en kısa mesafenin büyüklüğünü
almaktadır.
ve yönünü bulunuz.
M
I
R
R 46iˆ – 35 ˆj
R = 57.8 km
v
T
R
D
e
A
L
O
P km
35
tan AFA
46
km
T
S
U
. M = 37.30
35 km
R (46 km) 2 (35 km) 2 . L
I
D
L
I
Y
46
km
A
L
Y
E
B
R=?
A
R
D
(2-16)
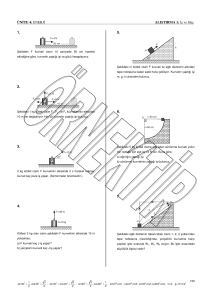
Örnek: Bir erkek çocuğu bir kıza, şekildeki gibi, 240 N’ luk bir kuvvet
uygulamaktadır. Kızın kolu yatayla 28 açı yaptığına göre bu kuvvetin
bileşenlerini bulunuz.
M
I
R
I
D
L
I
Y
F = 240
N
A
L
Y
E F
FLy
.
R
D
e
A
L
O
P
A
F
v
T
A
F = -|(240
|( S
N)T
) cos 28 | = - 240*0.88= -212 N
U
M
.
F = +|(240
|(
N)) sin 28 | =240*0.47= +113 N
R
D
x
y
0
0
280
Fy
Fx
Birim vektörler cinsinden
F 212 N iˆ 113 N ˆj
(2-17)
Örnek: Bir kaplumbağa aşağıda verilen ardışık üç yerdeğiştirme ve
yer değiştirmelerin
ğş
yyatayla
y yyaptığı
p ğ açı
ç verilmiştir.
ş Kaplumbağanın
p
ğ
bu y
toplam yer değiştirme vektörü R’ nin büyüklüğünü ve yönünü
bulunuz.
C=0
0.5
5m
A = 5 m, 00
R
M
I
R
I
D
L
YI
A
L
B=2
2.1
1m
Y
20
LE
.
R
A=5m
D
e
B = 2.1 m, 200
C = 0.5
0 5 m,
m 900
v
T
cos 200= 0.94
0 94
sin 200= 0
0.34
34
Vektör
f
A=5 m
0
A
T
A
F0
A
L
O
X-bileşeni
P ş ((i))
+5m
B=2.1m
B
2U
1S 200 +(2.1
(2 1 m)) cos 200
D
M
.
RC=0.5 m
0
900
0
Rx = Ax+Bx+Cx
Y-bileşeni
ş
(j)
0
+(2.1
(2 1 m)) sin
i 200
+ 0.5 m
Ry = Ay+By+Cy
(2-18)
Örnek devam: Verilen üç
ç vektörün toplamını
p
bulunuz.
A = 5 m,00; B = 2.1 m, 200; C = 0.5 m, 900R
. IM
x-bileşeni (i)
Ax = + 5.00
5 00 m
Bx = +1.97
9 m
Cx = 0
e
v
T
A
L
O
A = 5.00
P i+ 0j
A
FB = 1.97 i + 0.718 j
R
D
S
U
.M
A
T
C=
0i+ 0
0.50
50 j
R=
6
6.97
97 i + 1
1.22
22 j
I
D
L
I
Y
y-bileşeni (j)
A
L
Ay = 0EY
L
.
BR
0 8m
y = +0.718
D
Cy = + 0.50 m
(2-19)
Bi Vektörün
Bir
V k ö ü Bir
Bi Skalerle
Sk l l Çarpımı
Ç
:
M
I
R
I
D
L
I
s bir skaler nicelik ve a ' da bir vektör olmakYüzere,
A
L
bunların çarpımı b sa ile verilen yeni
bir vektördür.
vektördür
Y
E
L
.
B yenii vektörün
Bu
k ö ü büyüklüğü
bü üklüğüD
bR
= s | a | il
ile verilir.
ili
ve
s 0 ise, b vektörü aTile aynı yöndedir.
A
L
s 0 ise, b vektörü
a ile ters yöndedir.
O
P
A
F
A
Örnek
: F ma
T
S
U
.M
R
D
(2-20)
İki Vektörün Skaler Ç
Çarpımı
p
:
M
I
R
I
D
L
İki vektörün
ktö ü skaler
k l çarpımı, "dot
"d t veya nokta" çarpım Iolarak
l k da
d bili
bilinir.
i
Y
A
L
a ve b vektörlerinin skaler çarpımı a b =abYcos ifadesi ile verilir
verilir.
E
L
.
R
D
e
v
Örnek: İş
T
A
L
O
W Fx
P
A
F
A
T
S
U
M
.
R
D
(2-21)
Bileşenleri Cinsinden Skaler Çarpım :
M
I
R
I
D
L
a b = a x ˆi a y ˆj a z kˆ bx ˆi by ˆj bz kˆ YI
A
L
Y
E
ˆi ˆj kˆ olduğundan,
L
.
R
D
e
v
ˆi ˆi ˆj ˆj kˆ kˆ 1 T
A
L
ˆi ˆj ˆj ˆi 0
O
P a b axbx a yby az bz bulunur.
bulunur
A
ˆi kˆ kˆ ˆi F
0
A
T
S
ˆj kˆ kˆ ˆj 0
U
.M
R
D
(2-22)
Örnek : A = 2iˆ + 3jˆj + kˆ ve B = 4iˆ + 2jˆj kˆ vektörleri arasındaki
M
I
açıyı bulunuz.
IR
D
L
I iki
Bu soruda, iki vektör arasındaki açıyı bulmak için vektörlerin
Y
farklı yolla skaler çarpım işleminden yararlanacağız.
İki sonucu
A
L
birleştirerek açıya geçeceğiz
geçeceğiz.
Y
E
L
.
R
I. Yol : A B ABcosθ = (2) e
(3)D (1) (4) (2) (1) cosθ
v
T
= 14 21
cosθ
cosθ
A
L
O
P
II Y
II.
Yoll : A B AAB A B A B (2)(4) (3)(2) (1)(1) 3
F
A
T
S
U
A B
3
3
M
cos
θ=
0.175 θ = 100
.
R
AB
14 21
294
D
2
x
x
y
y
2
z
2
2
2
2
z
o
(2-23)
Örnek : A ve B vektörlerinin büyüklükleri aynı ve 5 birimdir.
M
I
ˆ
A+ B = 6i olduğuna göre, bu iki vektör arasındaki açıyı
Rbulunuz.
I
D
2
2
L
Kosinüs teoremine göre: A+B A + B + 2 AY
IB cos ' dır.
A
L
6 5 + 5 +Y
2 5 5 cos
E
Buna göre,
L
.
(6 0) (5) (5)
(6.0)
14 R
cos
D 0.28 106.3 bulunur.
e50
2(5)(5)
v
T
LA
Örnek : A 6iˆ 8jˆ O
; B 8iˆ + 3jˆ ve C 26iˆ +19jˆ vektörleri veriliyor.
AP
aA+bB+C =F0 eşitliğini sağlayan a ve b sayılarını hesaplayınız.
TA
ˆ + ( 8a 3b 19)jˆ 0
S
aA+bB
A+bB
+C
(6
a
8
b+
26)i
U
M 6a 8b 26
.
R
2
2
D
2
2
2
2
b l
a 5 ve b 7 bulunur.
8a 3b 19
o
(2-24)
Vektörel Çarpma:
M
I
R c a b
a ve b vektörleri arasındaki vektörel çarpma işlemi,
I
D
L
I
ile verilen yeni bir vektör oluşturur. c vektörünün
büyüklüğü
Y
A oluştur
L
c ab sin ile verilir ve a ile b vektörlerinin
ş duğğu
Y
düzleme diktir. Yönü "sağ-el-ku
LEralı" ile belirlenir:
.
R
D çarpım olarak da bilinir.
Vektörel çarpım,e"cross"
v
T
A
Sağ el kuralı:
L
O
i. a ve bPvektörlerinin başlangıç noktalarını birleştiriniz.
FA
iiA
. a vektörünü parmak uçlarınız onun yönünü gösterecek
T
R
D
S
şekilde
kild sağğ avuç içine
i i yatırınız.
t
U
M
.
iii. a vektörünü küçük açı yönünde b ' nin üzerine süpürünüz.
iv. Baş parmağınız c vektörünün yönünü verir.
(2-25)
Sağ el kuralı:
M
I
R
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(2-26)
M
I
R
A
L
Y
LE
I
D
L
YI
.
R
D
e
D
.
R
Vektörel çarpımın özellikleri:
c a xb
v
T
1 c abb sin
1.
i
A
L
O
2. a ve b birbirine
y antiparalel
p
ise c 0'dır.
P pparalel veya
FA
3. c Aa
ğ düzleme diktir.
T c vektörü a ve b ' nin bulunduğu
S
4.
c b
U
M
5. c ( b x a ) vektörel çarpımda değişme özelliği yoktur.
(2-27)
Bileşenleri Cinsinden Vektörel Çarpma :
a b a x ˆi a y ˆj a z kˆ b x ˆi by ˆj bz kˆ
D
ILDI
Y
ˆi ˆi ˆj ˆj kˆ kˆ 0
ˆi ˆj kˆ ; ˆj ˆi kˆ
.
R
M
I
R
A
L
Y
E
olduğundan
L
.
kˆ ˆi ˆj ; ˆi kˆ ˆj
R
D
ˆj kˆ ˆi ; kˆ ˆj ˆi
ve
T
a b a y bz az byLAˆi az bx ax bz ˆj ax by a y bx k̂
O
P
A
Not : a b, aşağıdaki determinant yolu ile de belirlenebilir.
F
A
T
i j k
S
U
a b ax a y az
; Not : a b b a
M
bx
by
bz
(2-28)
ˆ B = 4iˆ + 2jˆ kˆ ve C 5iˆ 2jˆ vektörleri verilsin.
Örnek : A = 2iˆ + 3jˆ + k,
M
I
a ) A B = ? , b) C (A+B) C A+C B olduğunu gösteriniz.
R
a )
b )
ˆi ˆj kˆ
A B 2 3 1 = 5iˆ 2ˆj +16kˆ
4 2 1
.
R
D
e
ˆi
ˆj kˆ
C (A+ B ) 5 2 0 = 21kˆ
2 5 0
A
F
A
L
O
P
v
T
ˆi ˆj kˆ
ˆ
ˆ
ˆ
C A 5 2 0 = 2i 5j +19k ve C B
2 3 1
S
U
.M
R
D
A
L
Y
LE
I
D
L
YI
A
T
ˆi
ˆj kˆ
5 2 0 = 2iˆ + 5jˆ + 2kˆ
4 2 1
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
C A C B = 2i 5j +19k 2i + 5j + 2k 21k C (A+B)
(2-29)
M
I
R
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(2-30)
M
I
R
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(2-31)
M
I
R
.
R
D
e
A
F
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
R
D
(2-32)
M
I
R
.
R
D
e
A
F
R
D
S
U
.M
A
L
O
P
A
L
Y
LE
I
D
L
YI
v
T
A
T
=0
cos
(2-33)
BÖLÜM-3
Bir Doğru Boyunca Hareket
M
I
R
I
D
L
B bölümde,
Bu
bölü d cisimlerin
i i l i bir
bi doğru
d ğ boyunca
b
h k ti i inceleyeceğiz.
hareketini
i I l
ği
Y
Aşağıdaki fiziksel nicelikleri ayrıntılı bir şekilde tanımlayacağız.
A
L
Y
Konum ve Yer-değiştirme
E
L
.
Ortalama Hız
R
D
Ortalama Sürat
e
v
Anlık Hız
T
Ortalama
O
ve Anlık
ALA İİvme
O
Pherhangi bir andaki hızı ve konumu
Sabit ivmeli hareket için,
için
A
F
veren bağıntıları türeteceğiz.
A
T
S
Ayrıca, yer yüzeyine
yakın noktalarda yerçekimi etkisi altında cisimlerin
U
hareketini M
inceleyeceğiz.
.
R
D olarak da, ivmenin sabit olmadığı durumlarda, cismin hareketini eğri
Son
altındaki alanın hesaplanması yöntemiyle inceleyeceğiz.
(3-1)
M
I
R
Kinematik,
Ki
tik cisimlerin
i i l i hareketini
h k ti i inceleyen
i l
mekaniğin
k iği bir
bi alt
lt dalıdır.
d ld
Bir cismin konumu zamanla değişiyorsa o cisim hareketlidir deriz.
I
D
L
I
Y
Hareketli cisimlerin noktasal parçacıklardan oluştuğunu ve hepsinin de
A
aynı
y şşekilde hareket ettiğini
ğ kabul edeceğiz.
ğ
L
Y
E
L
Bu bölümde, harekete neyin sebep olduğuyla. ilgilenmeyeceğiz.
R
D
x-ekseni boyuncae hareket eden bir cisim düşünelim.
v
Herhangi birTt anında, orijine göre cismin konumu x(t) ile
tanımlanır.Ax-ekseninin hangi tarafında bulunduğuna göre,
L
cismin
koordinatı
negatif veya pozitif olabilir.
O
P
A
KONUM: Bir cismin yerinin bir referansa göre
F
A
belirlenmesidir.
T
S
U
Bir cismin “konum vektörü”, bulunduğu koordinat
M
sisteminin orijininden cismin bulunduğu noktaya çizilen
.
R
vektördür.
ktö dü
D
(3-2)
Not: Yer-değiştirme ile gidilen toplam yol aynı şey değildir !!
M
I
R
.
R
A
F
S
U
A
L
O
P
D
e
v
T
A
L
Y
LE
I
D
L
YI
B
A
A
T
M
.
R
D
(3-3)
B
Yer değiştirme
50 m
A
A
L
O
P
M
I
R
Yol=100 m
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
Örnek: x1 5 m konumundan pozitif yönde x2 200 m konumuna
giden ve oradan tekrar başlangıçtaki konumuna dönen bir cisim
dü ü li
düşünelim.
A
F
S
U
A
T
Cisim toplam olarak 390 m yol aldığı halde,
M
.
ğş
Δx 0’ dır.
Ryyer-değiştirmesi
D
(3-4)
Yer-değiştirme Vektörü: Bir cisim x1 konumundan x2 konumuna
hareket etmişse, konumundaki değişim yer
yer-değiştirme
değiştirme ile tanımlanır.
M
I
R
x
x2 x1
yer değiştirme
son konum
ilk konum
SI sisteminde birimi (m)
.
R
A
L
Y
LE
I
D
L
YI
Örneğin,
Ö
ği ilk konumu
k
x1 5 m ve son konumu
k
x2 12 m olan
l bir
bi cismin
i i yerdeğiştirmesi Δx 12–5 7 m olacaktır. Δx’ in pozitif olması, yerğş
+x yyönünde olduğunu
ğ
ggösterir.
değiştirmenin
D
e
v
T
A
L
O
Cisim x 5 m konumundan
x 1 m konumuna hareket etseydi, yerP
d ği ti
değiştirme
Δ 1–5
Δx
1 5A – 4 m olurdu.
l d Δx’
Δ ’ in
i negatif
tif olması,
l
yerF olduğunu gösterir.
değiştirmenin –x A
yönünde
T
S
U
Yer-değiştirme,
hem büyüklüğü hem de yönü olan vektörel bir niceliktir.
M
.
R
T
Tek
k boyuttaki
b
tt ki hareketi
h k ti incelediğimiz
i l diği i bu
b bölümde,
bölü d yer-değiştirme
d ği ti
yönü
ö ü
Dolarak
Δx’ in işaretini kullanacağız.
1
2
(3-5)
Konum-zaman Grafiği ve Ortalama Hız:
M
I
Bir cismin hareketini tanımlamanın bir yolu, cismin konumunu zamana
R
I
bağlı
ğ olarak ççizmektir.
D
L
YI
Herhangi bir t anı ile t anı arasında, canlının x konumundanAx konumuna ne
L kti
k d hızlı
kadar
h l gittiği
ittiği konusunda
k
d “ortalama
“ t l
h ” bize
hız”
bi bir
bi fikir
fiki Y
verecektir.
E
L
.
Konum-zaman ggrafiğinde
ğ
((t , x ) noktasından ((t R
, x ) noktasına ççizilen doğrunun
ğ
D
eğimi, cismin t ve t aralığındaki v hızına eşittir.
e
v
AT
Lx2 x1 x
vortO
ortalama hız
P t2 t1 t
A
F
A
T
S
U
M
.
R
D
1
2
1
1
1
2
1
2
2
2
ort
(3-6)
Hareket ve konum-zaman
konum zaman grafiği
x
.
R
t
A
L
Cismin hareketini tanımlayınız.O
P
Ci i duruyor.
Cisim
d
A
F
A
T
S
U
M
.
R
D
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Duran bir cismin konum-zamana grafiği.
(3-7)
Hareket ve konum-zaman
konum zaman grafiği
x
t
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
A
L
O
P
Ci i hareketini
Cismin
h k ti i tanımlayınız.
t Al
F hızla gidiyor.
Cisim +x yönündeA
sabit
T
S
U
M
.
R
D
Değişen bir hızla hareket eden
bir canlının konum-zaman
grafiği
(3-8)
Hareket ve konum zaman grafiği
x (m)
B
x
x
A
t
t
A
F
vort T
xA
/ t
S
U
M
.
R
D
.
R
A
L
O
P
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Bir cismin konum-zaman grafiği
ggrafiktee verilmiştir.
ve
ş . Bu
u ccismin
s
ortalama hızı hesaplayınız.
vort = x/ t=2.0/6.0=1/3
t=2 0/6 0=1/3 m/s
(3-9)
Örnek: Şekilde bir cismin t1 = 1 s ve t2 = 4 s anlarındaki konumları
x1 = 4 m ve x2 = 2 m’dir.
Cismin ortalama hızını bulalım.
bulalım
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
x x 2 (4) 6 m
e
v
v
2 m/s
T
t t
4 1
3s
A
L
O
P
A
F
A
T
S
U
M
.
R
D
ort
2
2
1
1
(3-10)
Ortalama Sürat (vsürat_ort):
vsürat_ort
toplam yol
t
M
I
Ortalama sürat, Δt zaman aralığında alınan “toplam yol” cinsinden tarif edilir.IR
D
Ortalam sürat ortalama hızın büyüklüğü değildir.
L
YI
A
L
Ö rnek : Şekildeki otomobilin,
otomobilin A ve F
Y
E
noktaları arasındaki, ortalama hızını
L
.
ve süratini hesaplayınız ( t = 0 ve
R
D
=
30
m
;
=
50
s
ve
=
53
m).
x
t
x
e
v
T
x x
53 30
A
v
L
50 0 O
t t
P
83
A
1.66
m/s
F
50 A
T
S
x x x
22+52+53
U
v M
50
50
.
R
D 127 2.54 m/s
A
A
F
ort
F
F
F
A
A
AB
sürat_ort
50
BD
DF
(3-11)
Örnek : x-ekseni boyunca hareket eden bir cismin
M
I
R
konum-zaman grafiği yanda verilmiştir.
Cismin 0 2 s ; 0 4 s ; 0 7 s ; 0 8 s
aralıklarında ortalama hızını bulunuz.
0 8 s aralığında
ğ
cismin hız-zaman graf
g iğini
ğ çiziniz.
ç
.
R
A
L
Y
LE
I
D
L
YI
Konum-zaman grafiğinden;
10 0
50
vort(0-2)
5 m/s
; vort(0-4)
1.25 m/s
20
40
5 0
00
vort(0-7)
0.714 m/s ; vort(0-8)
0
70
80
v
A
F
A
L
O
P
D
e
v
T
A
T
dx
10 0
5 10
v(0-2)
5 m/s ; v(2-4)
2.5 m/s
dt
20
42
55
5 5
v(4-5)
0
; v(5-7)
5 m/s
54
75
0 (5)
v(7-8)
5 m/s
87
S
U
M
.
R
D
(3-12)
Anlık Hız:
Ortalama
O
t l
h bir
hız,
bi cismin
i i t1 ve t2 zaman aralığında
lğ d
ne kadar hızlı olduğu bilgisini içerir. Herhangi bir
t anında cismin ne kadar hızlı olduğu bilgisi “anlık
anlık
hız” tanımıyla verilir.
M
I
R
I
D
L
YI
A
L
Y
E hızın Δt →0
Anlık hız, ortalama
L
.
durumundakiRlimitidir.
D
e
x dx
v
v
lim
T
t 0 t dt
A
A
F
S
U
M
.
R
A
T
L
O
PBu
B tanımdan
d
anlık
l k hız,
h
cismin
i i x konumunun
k
zamana göre birinci türevidir.
Yani, konum-zaman grafiğinin herhangi bir
andaki eğimidir.
D
Anlık sürat anlık hızın büyüklüğüdür.
(3-13)
Örnek : x-ekseni boyunca hareket eden bir cismin konumu
x(t ) 4t +2t 2
M
I
R
I
ifadesine göre değişmektedir (t saniye, x metre cinsindendir). LD
YI
A
L
a ) 0 1 s ve 1 3 s aralıklarında cismin ortalama hızını
a
bulunuz
bulunuz.
Y
E
L
.
R
b ) t 2.5
2 5 s anındaki
d ki hızını
h
bbulunuz.
l
D
e
v
T
A
4 2 0
dx
L
b ) v(t )
4 + 4t m/s
a) v
O
2 m/s
dt
P
1 0
A
F
A
v((2.5)) 4 + 4(2.5)
( ) 6 m/s
S
12T 18 4 2
v
U
4 m/s
3 1
M
.
R
D
ort(0-1)
ort(1-3)
(3-14)
Ortalama İvme:
t1 ve t2 anları
l arasındaki
d ki ortalama
t l
iivme:
v2 v1 v
aort
t2 t1 t
.
R
Anlık İvme:
m// s2
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Anlık ivme, ortalama ivmenin Δt→0
durumundaki limitidir ve herhangi bir t anında
hızın ne kadar hızlı değiştiğini gösterir.
gösterir
A
F
S
U
D
M
.
R
A
T
A
L
O
P a lim v dv
t 0
t
dv d dx d 2 x
; a
2
dt
dt dt dt dt
Bu tanımdan
B
t
d anlık
l k ivme,
i
cismin
i i hızının
h
zamana
göre birinci türevidir. Yani, hız-zaman grafiğinin
g bir andaki eğimidir.
ğ
herhangi
(3-15)
Sabit İvmeli Hareket :
t 00'da
da cismin hızı v0 ve konumu x0 olsun
olsun.
I
D
L
YI
A
dv
L
a dv
d adt
dt ddv adt
dt a dt vE(tY
) v0 att
dt
L
0
0
v0
v
t
t
M
I
R
(E
(Eş-1)
1)
.
R
D
e
x
t
t
v
dx
v
dx vdt v0 atATdt dx v0 dt a tdt
dt
L
0
0
x
O
P
1 2
A
x(t ) x0 Av0Ft at
(Eş-2)
2
T
S
U
M
Bu iki. eşitlikten
t yok edilirse: v 2 v02 2a x x0 (Eş-3)
R
D
0
(3-16)
Konum x(t ), hız v(t ) ve ivmenin a(t ) zamanla değişimleri :
M
I
R
I
D
L
YI
Konum-zaman grafiği, düşeyi x x0’ da kesen bir
paraboldür.
paraboldür
1 2
x x0 v0t att
2
.
R
A
L
Y
LE
D
e
v
T
Hız-zaman grafiği, düşeyi v v0’ da kesen ve
eğimi
ğ
ivmeye
y ((a)) eşit
ş bir doğrudur.
ğ
A
F
S
U
M
.
R
A
L
O
P v v0 at
A
T
Burada ivme (a) sabittir.
D
(3-17)
Sabit İvmeli Hareket Denklemleri :
I
v vL0 D
a YI
t
A
L
Y
E
1. v v0 at
1 2
2 x x0 v0t at
2.
2
3. v v 2a ( x x0 )
2
2
0
A
F
S
U
A
T
M
I
R
L
.
R
ve D
L
O
P
T
A
1
4. x x0 vort t (v0 v)t
2
M
.
R
D
(3-18)
Örnek : x-ekseni boyunca
y
ilerleyen
y bir sürücü, t 10 s içinde
ç
hızını düzgün
g
M
I
R
olarak 10 m/s' den 30 m/s' ye çıkarıyor.
I
D
a) Sürücünün ivmesini bulunuz.
bulunuz
L
I
Y
b) Bu ivmelenme sürecinin ilk yarısında otomobil ne kadar
A yol alır?
L
Y
c) Bu ivmelenme sürecinde otomobil ne kadar yolE
alır?
L
.
R
D
30 10
2
e
a ) aort
2 m/s
v
10 0
T
A
L
1 PO
1
b ) x x x v t at 10 (5) (2) (5) 75 m
A
2
2
F
A
T
S
1
1
U
c ) x x x v t at 10 10 (2) (10) 200 m
M
2
2
.
R
D
s
i
s
2
i
i
i
2
2
2
(3-19)
Örnek : Durgun halden harekete başlayan bir cismin
ivme-zaman grafiği yanda verilmiştir.
a ) t 10 s ve t 20 s anlarında cismin hızı nedir?
M
I
R
I
D
L
YI
b ) İlk 20 s içinde cisim ne kadar yol almıştır?
A
L
Y
a) t 0 10 s a 2 m/s v v at v 20 m/s
E
L
10-15 s aralığında a 0 olduğundan hız sabittir. ve 20 m/s' dir.
R
D
e hız 20 m/s' dir.
15-20 s aralığında a 3 m/s vevilk
T
v v at v 20 A(3)) ((5)) 5 m/s
/
L
O
(20) (0)
b) 0-10
0 10 s aralığında: v v P 2a x x x =
=100 m
A
2(2)
F
A
10-15 s aralığında:
a 0 ve v 20 m/s x =20 (5)=100 m
T
S
U
(5) (20)
M
15-20
s aralığında: v v 2a x x x =
= 62.5 m
.
2 (3))
R
Dx x x x 262.5 m
2
0
2
0
2
2
2
0
0
2
1
2
2
1
2
3
2
0
2
0
2
3
(3-20)
Serbest Düşme:
M
I
R
Dünya yüzeyinin yakınlarında tüm cisimler büyüklüğü 9.8 m/s2 ve yönü
dünyanın merkezine doğru olan bir ivmenin etkisinde hareket ederler.
Serbest düşmede cisimlerin ivmesi sembolik olarak “g” ile gösterilir.
I
D
L
YI
A
F
S
U
M
.
R
A
T
A
L
Y
y-ekseni düşeyde ve yukarı
yönde alınırsa,
E
L ivmesi a = g olur.
serbest düşmede cismin
.
R
D
e
v
vA
vT0 gt
(Eş 1)
(Eş-1)
L
O
P y y0 v0t 1 gt 2
(Eş-2)
2
v2 v02 2g y yo
(Eş
(Eş-3)
3)
D
(3-21)
Örnek : 50 m yüksekliğinde bir binanın tepesinden bir taş düşey
d ğ lt d yukarı
doğrultuda
k ddoğru
ğ 20 m/s
/ hhızla
l ffırlatılıyor.
l tl
(g 10 m / s 2 )
a ) Taş maksimum yüksekliğe ne kadar zamanda çıkar?
M
I
R
I
D
L
YI
b) Bu nokta yerden ne kadar yüksektedir?
c) Taş fırlatıldığı seviyeye ne kadar zamanda gelir? Bu noktada hızı ne olur?
d ) t 5 s anında taşın hızı ve konumu nedir?
.
R
A
L
Y
LE
a ) M
Maksimum
ki
yükseklikte
ük klikt cismin
i i hhızı sıfırdır:
Df d v v0 gtt t 2 s
e
v
b ) v v 2 g y y y yT 20 m h 70 m
A
L
O
1
1
2 (20)
P
c ) y y 0 v t gt
g t (v gt
g )0t
4s
2 A
2
10
F
A
v v gt 20
10 (4) 20 m/s
T
S
U
d ) v v gt
20 10 (5) 30 m/s
M
.
v v
900 400
R
Dy 50 2 (10) 20 25 m y 25 m
2
2
0
o
o
2
0
0
0
0
0
2
2
0
(3-22)
Örnek : Bir helikopterin yerden yüksekliği y 3t 2 ile veriliyor. Burada
t saniye
y ve y metre cinsindendir. t 2 s anında helikopterden
p
bir paket
p
M
I
serbest bırakılıyor.
IR
a) P
Paket
k t ne kkadar
d zamanda
d yere ulaşır
l
(g 10 m / s )?
b) Paket yere ulaştığı anda hızının büyüklüğü kaç m/s'dir?
LA
2
c) Paketin ivmesi için ne söyleyebilisriniz?
.
R
D
L
YI
Y
LE
dyy
a ) v
6t paket
k t serbest
b t bırakıldığı
b k ld ğ andaki
d ki hhızı v0 12 m/s
/
dt
ve y
yerden yyüksekliği
ğ y0 12 m' dir.
A
D
e
v
T
L
1 2
12 384
2
y y0 v0t gt O
3.16 s
0 12 12t 5t t
P
2
10
A
Fzamana bağlı fonksiyonu: v(t ) 12 gt
b ) Paketin hızının
A
T 3 16 19
v 12 S
10 3.16
19.66 m/s
U
M
dv
.
c )R
Paketin ivmesi a
g 10 m/s
D
dt
2
dir ve sabittir.
sabittir
(3-23)
Duran bir cismin
M
I
konum-zaman, hız-zaman, ivme-zaman grafikleri:
IR
x
v
t
A
Konum-zaman
o u
aSaT
U
M
.
R
D
A
F
.
R
A
L
O
P
D
e
v
T
Hız-zaman
Hız
zaman
A
L
Y
LE a
D
L
YI
t
t
İvme-zaman
(3-24)
Sabit hızla hareket eden bir cismin
M
I
konum-zaman, hız-zaman, ivme-zaman grafikleri:
IR
x
v
t
A
Konum-zaman
o u
aST
a
U
M
.
R
D
A
F
.
R
A
L
O
P
D
e
v
T
Hız-zaman
Hız
zaman
t
A
L
Y
LE a
D
L
YI
t
İvme-zaman
İvme
zaman
(3-25)
Sabit ivme ile hareket eden bir cismin
M
I
konum-zaman, hız-zaman, ivme-zaman grafikleri:
IR
x
v
t
A
F
S
U
A
T
Konum-zaman
M
.
R
.
R
A
L
O
P
D
e
v
T
Hız-zaman
A
L
Y
LE a
D
L
YI
t
t
İvme zaman
İvme-zaman
D
(3-26)
İvmenin Sabit Olmadığı Durum :
Cismin
Ci
i ivmesi
i
i sabit
bit değilse,
d ğil cismin
i i hızını
h
v (t ) ve kkonumunu x (t )
integrasyon yoluyla bulabiliriz.
M
I
R
I
D
L
YI
İntegrasyon analitik olarak veya grafik yaklaşımı ile yapılır.
A
L
d
dv
a
dv adt dv adt v v adt vEYv adt
L
dt
.
R
D
e
v
kalan alan
adt a(t) t grafiğinde eğri altında
T
A
L
O
P
A
F
dx
A
v
dx vdt
dx vdt
T
dt
S
U
M
.
x R
D x vdt x x vdt vdt v(t) t grafiğinde eğri altında alan
v1
t1
t1
1
v0
0
t0
t1
1
t0
0
t0
t1
t0
x1
t1
x0
t0
t1
1
0
1
t0
t1
t1
t0
to
0
(3-27)
x (t )), v (t ) ve a (t ) arasındaki ilişki:
x (t )
Türev
İntegral
v (t )
D
e
v
T
A
L
Y
Türev
E
L
.
R
M
I
R
I
D
L
YI
İntegral
a ((t )
D
A
L
O
t
dx A P
x (t ) x0 v(t)
(t)dt
v F
0
A
dt
T
S
U
t
M
dv
.
v (t) v 0 a ( t ) d t
R a
dt
0
(3-28)
BÖLÜM-4
İki ve Üç Boyutta Hareket
Bu bölümde, tek boyut kısıtlaması olmadan, bir düzlemde ve uzayda
cisimlerin hareketini incelemeye devam edeceğiz.
Düzlemde harekete örnek olarak “eğik atış” ve “düzgün dairesel
hareket” ayrıntılı bir şekilde incelenecektir.
hareket
incelenecektir
Son olarak da, birbirlerine göre sabit hızla hareket eden referans
sistemlerine göre bir cismin hareketi incelenecektir. (Bağıl hareket)
(4-1)
Konum Vektörü
Bir parçacığın konum vektörü r , bulunduğu koordinat sisteminin
merkezinden p
parçacığın
ğ bulunduğu
ğ noktaya
y çizilen vektördür.
Örnek : Şekilde P noktasında bulunan cismin konum vektörü
r xˆi yˆj zkˆ
P
r 3iˆ 2ˆj 5kˆ (m)
(4-2)
Yer-değiştirme Vektörü
r1 konumundan r2 konumuna hareket eden bir cismin yer-değiştirme vektörü,
r r2 r1 biçiminde tanımlanır. r1 ve r2 konum vektörleri bileşenleri cinsinden
ˆ
ˆ
ˆ
r x i y j z k ve r x ˆi y ˆj z k̂ biçiminde ifade edilirse, yer-değiştirme
1
1
1
1
2
2
2
2
vektörü de bileşenleri cinsinden
r x2 x1 ˆi y2 y1 ˆj z2 z1 kˆ xˆi yˆj zkˆ
olur
olur.
x x2 x1
y y2 y1
z z2 z1
(4-3)
Ortalama ve Anlık Hız
Bölüm 3’ de tanımlandığı gibi,
Ortalama Hız =
Yer-değiştirme
Yer
değiştirme
biçiminde verilir.
Zaman
r xˆi yˆj zkˆ x ˆ y ˆ z ˆ
vort
i
j k
t
t
t
t
t
Anlık hız ise,
ise ortalama hızın t 0
durumundaki limitidir.
r dr
v lim
t 0 t
dt
(4-4)
t ' nin sıfıra gitmesi durumunda:
1. r2 vektörü r1 vektörü üzerine doğru kayar ve r 0 durumu gerçekleşir.
r
2.
vektörü (yani vort ), "1" noktasında yörüngeye çizilen teğet yönündedir.
t
3. vort v
dx
dy
dz
d ˆ ˆ ˆ
v
xi yj zk ˆi ˆj kˆ
dt
dt
dt
dt
v v ˆi v ˆj v kˆ
x
y
z
Hız bileşenleri şu eşitliklerle verilir:
dx
dy
ddz
dr
vx ; vy ; vz
v
dt
dt
dt
dt
(4-5)
Ortalama ve Anlık İvme
v v v
Hızdaki değişim
Ortalama ivme
aort 2 1
Zaman
t
t
Anlık ivme ise, ortalama ivmenin t 0 durumundaki limiti olarak tanımlanır :
d y ˆ dvz ˆ
dvx ˆ dv
v dv d ˆ
ˆ
ˆ
i
j
k axˆi ay ˆj az kˆ
a lim
vx i vy j vz k
t 0 t
dt dt
dt
dt
dt
Not: İvme vektörünün, hızdaki gibi, izlenilen yörüngeyle özel bir ilişkisi yoktur.
İvme bileşenleri şu eşitliklerle verilir:
d y
dv
dv
d x
dv
d z
dv
d
ax
a
; ay
; az
dt
dt
dt
dt
(4-6)
Örnek : Bir cisim, ilk hız bileşenleri v0 x 20 m/s ve v0 y 15 m/s olacak
şekilde, t 0 anında orijinden harekete başlıyor. xy -düzleminde hareket
eden cismin ivme bileşenleri de a x 4 m/s 2 ve a y 0 ' dır.
a) Cismin herhangi bir andaki hızını bulunuz.
b) Cismin herhangi bir andaki konumu nedir?
a ) vx v0 x ax t 20 4t m/s ; v y v0 y a y t 15 m/s
v 20 4t ˆi 15jˆ m/s
b ) t 0 x0 y0 0:
1
x(t ) x0 v0 x t ax t 2 20t 2t 2
2
2 ˆ
r
t
t
20
2
i 15t ˆj m
1
y (t ) y0 v0 y t a y t 2 15t
2
(4-7)
Eğik Atış
Bir cismin yer-çekimi kuvvetinin etkisi altında düşey düzlemdeki hareketi
“eğik
eğik atış”
atış hareketi olarak adlandırılır.
Cisim hareketine v0 ilk hızıyla başlar.
İlk hızın yatay ve düşey bileşenleri şu ifadelere sahiptir:
v0x v0 cos0 ; v0 y v0 sin0
Eğik atış hareketi, x-ekseni ve y-ekseni boyunca ayrı ayrı incelenecektir. Bu
iki hareket birbirinden bağımsızdır. x-ekseni
ekseni yönündeki hareketin ivmesi
sıfır, y-ekseni yönündeki hareketin ivmesi ise a g’ dir.
(4-8)
Yatay Hareket : ax 0' dır ve x-ekseni yönündeki hız değişmez.
vx v0 cos 0
(Eş-1)
ve
x x0 v0 cos 0 t
(Eş-2)
Düşey Hareket : ay g' dir vee y-eksenindeki
eksenindeki hareket serbest düşmedir.
düşmedir
vy v0 sin 0 gt
(Eş-3) ve
1
y y0 v0 sin 0 t gt 2
2
(Eş-4)
Eş-3' ten t bulunup Eş-4' te kullanılırsa; v y2 v0 sin 0 2 g y y0
2
bağıntısı elde edilir.
edilir
Bu eşitliklerdeki x0 ve y0 , cismin harekete
başladığı noktanın koordinatlarıdır.
Çoğu problemde hareketin başladığı nokta
orijin olarak alınır (x0 0 ; y0 0).
(4-9)
Yörünge denklemi :
vx v0 cos 0
(Eş - 1) ; x v0 cos 0 t
(Eş - 2)
v y v0 sin 0 gt
1 2
(Eş - 3) ; y v0 sin 0 t gt
2
(Eş - 4)
Eş-2'
ş den t ççekilip
p Eş-4'
ş te kullanılırsa,,
y tan 0 x
g
2 v0 cos 0
2
x2
bulunur ve bu eşitlik cismin izlediği yörüngenin denklemidir.
Yörünge denklemi y = ax + bx 2 formundadır ve bir parabolü tanımlar.
(4-10)
v02 sin 2 0
Yatay Menzil ( R ) : R
g
Cismin harekete başladığı nokta ile yere düştüğü nokta x -ekseni
üzerindeyse (y0 y 0), cismin yatayda aldığı yol (R ) menzil
olarak bilinir. Eş-4' ten
v0 sin 0 t
2v sin
i 0
1 2
1
gt 0 t v0 sin 0 gt 0 t 0
g
2
2
bulunur t , cismin uçuş süresidir ve Eş-2 [x v0 cos 0 t ]]' de
bulunur.
yerine konursa
2v02
v02 sin2θ0
R
sin 0 cos 0 R =
g
g
A
O
R
t
bulunur
bulunur.
Ci i yatayla
Cisim
t l 0 45 ' lik açı yapacak
k şekilde
kild atılırsa
tl
maksimum menzile ulaşır. Rmax
v 02
=
g
(4-11)
Maksimum Yükseklik (H):
v02 sin 2 0
H
2g
2g
v y v0 sin 0 gt
A noktasında, v y 0 :
v0 sin 0
v0 sin 0 gt 0 t
g
H y (t )
v0 sin 0 1 v0 sin 0
1 2
g
H v0 sin 0 t gt v0 sin 0
2
g
2
g
v02 sin 2 0
H
2g
2
(4-12)
Örnek : Bir taş, yükseklği 45 m olan bir binanın
tepesinden yatayla 30o açı yapacak şekilde
v0 20 m/s' lik ilk hızla fırlatılıyor.
a ) Taş,
Taş ne kadar sürede yere düşer?
b) Taş, atıldığı noktadan ne kadar uzakta yere düşer?
cc)) Taş, yere hangi hızla çarpar?
1
a ) y y0 v0 y t gt 2 5t 2 20 sin(30)t 45 0 t 4.22 s
2
b ) x x0 v0 x t
1 2
a x t x 20 cos(30)t 73 m
2
c ) vx v0 x 20 cos(30) 17.3 m/s
v y v0 y gt 20 sin(30) (9.8) (4.22) 31.4 m/s
v 17.3iˆ 31.4ˆj m/s
(4-13)
Örnek : Bir kurtarma uçağı yerden 100 m yükseklikte, 40 m/s yatay hızla giderken,
mahsur kalmış bir grubun bulunduğu noktaya yardım paketi ulaştırmak istiyor.
istiyor
a ) Paketin grubun bulunduğu noktaya düşmesi için geçen süre nedir?
b ) Hangi yatay uzaklıktan bırakılmalıdır?
c ) Paket hangi hızla yere çarpar?
a ) y y 0 v0 y t
1 2
1
gt 100 (9.8) t 2
2
2
t 4.52 s
1
b ) x x0 v0 x t ax t 2 x v0 x t 40 (4.52)
(4 52) 181 m
2
c ) vx v0 x 40 m/s
v y v0 y gt (9.8) (4.52) 44.3 m/s
v 40iˆ 44.3jˆj m/s
(4-14)
Örnek : Bir kayakçı, şekildeki gibi 25 m/s' lik yatay bir hızla atlayış yapıyor
ve rampanın alt ucuna düşüyor.
düşüyor Rampanın eğim açısı 35 o ' dir.
dir
a ) Kayakçı ne kadar süre havada kalır?
b ) Rampanın uzunluğ u ( d ) ne kadardır?
c ) Kayakçı rampaya hangi hızla çarpar?
1
y gt 2 44.9
9t 2 d sin(35)
i (3 )
2
25 tan(35)
4.9t 2
tan(35)
t
3.57 s
( )
25t
49
4.9
a ) x v0 x t 225t d cos(35)
(3 ) ;
b ) 25t d cos(35)
(35) d
25 (3.57)
109 m
cos(35)
c ) vx v0 x 25 m/s ;
v y v0 y gt (9.8) (3.57) 35 m/s
v 25iˆ 35jˆ m/s
(4-15)
Düzgün Dairesel Hareket:
Yarıçapı r olan çembersel bir yörüngede sabit v
hızıyla hareket eden cisim “düzgün
düzgün dairesel
hareket” yapıyor denir.
hareket
denir Yörüngenin her
noktasında cismin hızının büyüklüğü aynı fakat
yönü farklıdır.
Hızın değişmesi ivmenin sıfır olmadığı anlamına gelir.
gelir.
Dü ü dairesel
Düzgün
d i
l harekette
h k tt ivme
i
şu özellikleri
ö llikl i taşır:
t
1.
Çember üzerindeki her noktada çemberin merkezi olan C noktasına
doğrudur ve bu nedenle “merkezcil ivme” olarak adlandırılır.
adlandırılır
v2
2. Büyüklüğü a
bağıntısı ile verilir.
r
Cisim bir tam turunu bir periyotluk sürede (T) alır ve
2 r ile ifade edilir.
T
v
(4-16)
v vx ˆi v y ˆj v sin ˆi v cos ˆj
P noktasında konum, hız ve ivme :
yP r sin , xP rcos
y P ˆ xP ˆ
dv
v v i v j ; a
=
r
r
dt
v dyyP ˆ v dxP ˆ
i
j
r
dt
r
dt
ˆ v2
ˆ
v2
v2
2
2
a cos i sin j ; a ax a y
r
r
r
tan
ay
ax
v 2 / r sin
v / r cos
2
tan ivme, C' ye doğrudur.
(4-17)
Örnek : Bir taş, 0.5 m uzunluğundaki bir ipin ucuna asılmış
ve şekildeki gibi düşey düzlemde çembersel bir yörünge
üzerinde salınım yapmaktadır. İp, düşey eksenle 20o ' lik açı
yaptığında, taşın hızı 1.5 m/s' dir.
a) Tam bu anda, radyal ve teğetsel yönlerdeki ivme nedir?
b) Tam bu anda, net ivmenin büyüklüğünü ve yönünü bulunuz?
v2 (1.5)2
a) ar
4.50 m/s2
r
0.5
at g sin( ) 9.8 sin(20) 3.35 m/s2
b ) a ar2 at2 (4.50) 2 (3.35) 2 5.61 m/s 2
tan 1 (
3.35
) 36.7 o (ivmenin ip doğrultusu ile yaptığı açı)
4 50
4.50
(4-18)
Bir Boyutta Bağıl Hareket:
Hareket:
Bir P cisminin,
cisminin birbirine göre hareketli A ve B gözlem çerçevelerine göre
ölçülen hızları birbirinden farklıdır. B gözlemcisinin durgun olan A
gözlemcisine göre sabit bir vBA hızı ile hareket ettiğini varsayalım. Herhangi
bir anda A ve B gözlemcileri, sırasıyla, P cisminin konumunu xPA ve xPB
olarak ölçsünler. xBA’de B gözlemcisinin A gözlemcisine göre konumu olsun.
d
d
d
xPA xPB xBA xPA xPB xBA vPA vPB vBA
dt
dt
dt
dvBA
0 aPA aPB
dt
N t A ve B gözlemcileri
Not:
ö l
il i P
cisminin hızını farklı ölçerler
fakat ivmesini aynı ölçerler.
(4-19)
İki Boyutta Bağıl Hareket :
B gözlemcisinin A gözlemcisine göre xy - düzleminde sabit bir vBA hızı ile
hhareket
k t ettiğini
ttiği i varsayalım.
l
Herhangi
H h i bir
bi anda,
d A ve B gözlemcileri
ö l
il i P
cisminin konum vektörünü, sırasıyla, rPA ve rPB olarak ölçsünler. rBA ise B
gözlemcisinin A gözlemcisine göre konum vektörü olsun.
d
d d
rPA rPB rBA rPA rPB rBA vPA vPB vBA
dt
dt
dt
dv BA
0 a PA a PB
dt
(4-20)
Örnek : Genişliği 3 km olan ve doğu yönünde 5 km/sa düzgün
hızla akan bir nehirde, kayıkçı rotasını tam olarak kuzeye
yönlendirmiş ve suya göre 10 km/sa hızla ilerlemektedir.
a) Karadaki
d bir
b gö
gözlemciye
e c ye ggö
öre,
e, kayıkçının
y ç
hızını bu
bulunuz.
u u.
b) Kayıkçı ne kadar sürede karşı kıyıya ulaşır?
c) Tam karşıdaki
ş
bir noktaya
y ulaşması
ş
için
ç rotası ne olmalıdır?
a ) v KY v KN v NY 10 Nˆ 5 Eˆ km/sa
5
vKY = 10 2 5 2 11.2 km/sa ; tan 1 26.6 o
10
b ) d vKN t t
3
0.3 sa 18 dk
10
2
2
c ) vKY = vKN + vNY vKY = vKN
vNY
102 52 8.66 km/sa
5
o
30.2
8.66
tan 1
(4-21)
PRATİK: Hızların başlangıç
ş g ç noktalarını
birleştir, bakandan bakılana vektör çiz.
vbakılan
Çizdiğin bu vektör bağıl vektördür.
vbakan
vbağıl
Örnek: Şekilde, bir dörtyol kavşağına aynı v hızı ile
gelmekte
l kt olan
l K,
K L,
L M ve N araçları
l görülmektedir.
ö ül kt di
a) K’ dan bakan L’ yi nasıl görür?
L
K
v
v
N
K
v
M
v
vLK v 2
L
v
b ) M’ den bakan K’ yı nasıl görür?
vK
vM
vKM=2v
2
(4-22)
Örnek: Doğuya
ğ y doğru
ğ v hızıyla
y g
gitmekte
olan bir aracın içindeki yolcu yere düşen
yağmur damlasını güneye v hızıyla
gidiyormuş gibi görüyor.
görüyor Buna göre
yağmur damlasının yere göre hızı nedir?
vbakan
varaç-yer= v
vbakılan
vbağıl
vyağmur
yağmur-yer
yer
vyağmur-araç
yağmur araç= v
vDY = vDA + v AY vDY vˆj vˆi
vDY =
v
2
v
v 2 2v ; tan 1 45o
v
vyağmur-yer=?
varaç-yer
vyağmur-yer= v 2
y
x
(4-23)
Örnek: Doğuya doğru gitmekte olan X aracındaki gözlemci Y aracını
doğuya doğru, Z aracını batıya doğru gidiyormuş gibi görüyor. Buna göre,
Y ve Z araçlarının hareketleri hakkında neler söylenebilir?
Y kesinlikle doğuya doğru gidiyor ve hızı X’in
hızından büyüktür.
Buna göre,
g ,
1) Z, X’ in hızından daha düşük bir hızla doğuya gidiyor olabilir.
2) Z durgun olabilir.
3) Z batıya doğru gidiyor olabilir
olabilir.
(4-24)
Nehir Problemleri:
1- Suya göre hız: Su durgun iken yüzücünün veya kayığın sahip
olduğu
ld ğ hızdır.
h d
2- Kayığa
y ğ ggöre hız: Kayık
y durgun
g iken kayığın
y ğ içindeki
ç
hareketlinin hızıdır.
3- Yere
3
Y göre
ö h
hız: Suya
S
göre
ö hhız il
ile akıntı
k t hhızının vektörel
ktö l
bileşkesi olan hız. Yani yerde duran bir gözlemciye göre hızdır.
NOT: Nehir problemlerinde yere göre hız ile işlem yapılır.
(4-25)
Örnek: Akıntı hızının 5 m/s olduğu bir
nehirde,
hi d bir
bi kayık
k k K noktasından
k
d L
noktasına, suya göre sabit hızla 10 s’de
ggidiyor
y ve 20 s’de ggeri dönüyor.
y Buna
göre K-L uzaklığı kaç cm’dir?
KL=LK
vsu=5 m/s
vkayık
K
L
(vkayık 5) 10 (vkayık 5) 20
vkayık 15 m/s
KL (vkayık 5) 10 (15 5) 10 200 m
(4-26)
İki Boyutta Nehir Problemleri:
L
M
vsu
vkayık-su
vkayık-yer
K
N t 11: Her
Not
H hhız kkendi
di yolunu
l
alır.
l
Not 2: Kayık karşı kıyıya her zaman yere göre hızı doğrultusunda çıkar.
KL=(vkayık-su) t
LM=(vsu) t
KM=(v
KM
(vkayık-yer
)t
k k
(4-27)
BÖLÜM-5
Kuvvet ve Hareket I
M
I
R
I
D
Şu ana kadar hareketli bir cismin konum,
konum hız ve ivmesini tanımladık.
tanımladık
L
I
Y
Cismin Hareketine neyin sebep olduğuyla ilgilenmedik.
A
Bu ve sonraki bölümde ise, klasik mekaniğin temeliLolan ve geniş bir
Y
E
aralıkta pek çok fiziksel olguyu açıklayan Newton
yasalarını öğreneceğiz.
L
.
Ö ği yıldız
Örneğin,
ld ve gezegenlerin
l i hareketleri
h k tlDiRNewton
N t yasalarına
l
uyar.
e geçersiz olduğunu akılda
Ancak, aşağıdaki iki koşulda bu yasaların
v
T
tutmak gerekir.
gerekir
A
L
O
Pş hızına ççok yyakın olduğu
1. Cisimlerin hızlarının ışık
ğ durumlarda ((% 99
A Einstein’ in özel görelilik teorisini (1905)
veya üzeri). O F
zaman
A
kullanmamızTgerekecek.
S
U
M cismin boyutlarının çok küçük olduğu durumlarda
2. İncelenen
.
R
(elektron
(elektron,
proton nötron veya atom).
proton,
atom) O zaman da,
da Kuantum
D
mekaniğini (1926) kullanmamız gerekecek.
(5-1)
Newton’un Birinci Yasası = Eylemsizlik Yasası
M
I
R
Newton’ dan önce, bir cismin sabit bir hızla hareket etmesi için bir kuvvetin
etkimesi gerektiği düşünülüyordu. Bir cismin durgun olması onun “doğal
durumu” olarak biliniyordu. Ancak bu hata, “sürtünme” nin de bir kuvvet
olduğunun anlaşılmasından önceydi.
I
D
L
YI
A
L
Y
Örneğin, bir cisim pürüzlü yatay bir düzlemdeLvE
0 ilk hızıyla harekete
.
başlarsa
ş
bir süre sonra duracaktır.
R
D
e daha pürüzsüz bir yüzeyde
Diğer yandan, aynı cisim aynı ilk vhızla
T
harekete başlarsa çok daha sonra duracaktır.
duracaktır
A
L
Newton bu fikri ay ve gezegenlerin
hareketlerine uyguladı. Uzayda
O
Pdoğruluğu kesin olan “Newton’ un birinci
sürtünme olmadığı için,
için
A
F oldu. Buna göre,
yasası” ortaya çıkmış
A
T
S
Bir cismeUnet bir kuvvet etkimiyorsa, cisim durumunu korur.
M durmaya, hareketliyse aynı hızla düzgün doğrusal
.
Durgunsa
R
hareketine
devam eder.
D
(5-2)
M
I
R
K
Kuvvet:
t Bir
i cisme
i
etkiyen
ki
k
kuvvet,
sebep
b
olduğu ivmenin ölçülmesi ile belirlenebilir.
.
R
A
L
Y
LE
I
D
L
YI
Sürtünmesiz bir yüzey üzerine kütlesi m = 1 kg olan bir cisim koyalım
ve uygulanan bir F kuvvetinin oluşturduğu a ivmesini ölçelim.
D
e
v
T
A
L
Kuvvet, cismin ivmesi P
aO
= 1 m/s2 olacak şekilde ayarlanırsa,
uygulanan kuvvet,FFA= 1 newton (N)’ dur denir.
A
T
S
U
M
.
R
D
(5-3)
Kütle: Cisme özgü bir sabittir ve cisimdekiIM
F
R
I
madde miktarının bir ölçüsüdür. Bir cismin
a
D
L
I
kütlesi, cisme etki eden F kuvveti ile bu
kuvvetin
Y
F
sebep olduğu a ivmesini birbirine bağlayan
cisme
A
m
L
ö ü bir
özgü
bi niceliktir.
i likti
Y
a
E
L
.
Kütl i m0 = 1 kg
Kütlesi
k olan
l bir
bi cisme
i
F = 1 ND
kR t uygulayalım.
kuvvet
l l
e
Bu kuvvet cisme a0 = 1 m/s2 ivmesinivkazandırır.
T
Acisme uyguladığımızda cisme
Aynı kuvveti, kütlesi mX olan bir
L
O Bu durumda,
kazandıracağı ivme de aX P
olsun.
a
m FA a
m m
A
Tm a
a
S
U
MBöylece, aX ivmesi ölçülerek herhangi bir cismin mX kütlesi
bulunur.
.
R
belirlenebilir.
D
m0
0
X
X
X
0
0
X
X
0
0
X
(5-4)
Newton’un İkinci Yasası
M
I
R
Bir cisme etki eden net kuvvet (Fnet), bu kuvvetin cisme kazandırdığı ivme
(a) ve cismin kütlesi (m) arasındaki ilişki “Newton’un ikinci yasası”
olarak adlandırılır ve şöyle tanımlanır:
Fnet
y net kuvvet ile cisme kazandırdığı
ğ ivme
Bir cisme etkiyen
doğru orantılıdır ve orantı sabiti de o cismin kütlesine
eşittir.
.
R
D
Fnet ma
ve
m
A
L
Y
LE
I
D
L
YI
a
T
A
Not : Cisme FA , FB ve FC gibi çok sayıda
L
O
kuvvet etkiyorsa, net kuvvet
P
A
bunların vektörel toplamıdır
ve
F
TA
F F FS
F ile verilir
verilir.
U
Muzayda (xyz-koordinat sistemi) bileşenleri cinsinden Newton’ un
Üç boyutlu
.
R
ikinci
D yasası: F ma ; F ma ; F ma
net
A
B
C
net, x
x
net, y
y
net, z
z
(5-5)
Mekanik Problemlerinde Çok Sıklıkla Karşılaşacağımız Kuvvetler
ve Bunların Özellikleri:
M
I
R
I
Yer-çekimi
ç
Kuvveti: Bir cisme Dünya
y LD
tarafından
I
uygulanan kuvvettir. Dünyanın merkezineYdoğrudur ve
A
Newton’ un ikinci yasasına göre şöyle verilir.
L
Y
E
ˆ
L
F ma mgj . F mg
R
D
e
v
Newton’un
evrensel kütle çekim yasasının
T
A bir nokta kütle (m ) diğer bir nokta
mekanizması;
L
kütleyi
(m ), iki kütlenin çarpımı ile doğru,
O
Paralarındaki (r) uzaklığının karesi ile ters orantılı
A
F olacak büyüklükteki bir F kuvveti ile çeker.
A
T
S
Kütl l d
Kütlelerden
ve bu
b
kütl l i
kütlelerin
aralarındaki
l
d ki
U
g
g
1
2
G, kütle çekim sabitidir.
R
D
.M
uzaklıktan bağımsız olarak |F1| ve |F2|
y
her zaman birbirine
kuvvetlerinin büyüklükleri
eşittir.
(5-6)
Ağırlık: Bir cismin ağırlığı, cismin serbest düşmesini
Ağ
I
D
L
YI
engelleyecek kuvvetin büyüklüğü olarak tanımlanır.
g
W
y
.
R
A
L
Y
LE
M
I
R
D
mg e
v
T
A
L
O
Fnet,
ma
g 0 W mg
g
net y
y PW mg
A
F
A
T
S
Not: Ağırlık
ve kütle farklı niceliklerdir. Yer-çekiminin
U
Molduğu yerlerde (örneğin ayda, gm = 1.7 m/s2),
farklı
.
R
Dkütle değişmezken ağırlık değişir.
(5-7)
Değme Kuvveti: İsminden de anlaşılacağı gibi, bu kuvvetler birbirleriyle
temas halindeki y
yüzeyler
y
arasında oluşur.
ş
İki tür temas kuvveti vardır.
Birincisi temas yüzeyine dik yöndeki “normal kuvvet”, ikincisi de temas
yüzeyine paralel olan “sürtünme kuvveti” dir.
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
A
L
O
P bulunduğu yüzeye bir baskı uygularsa,
Normal Kuvvet: Bir cisim
uygularsa yüzey
A
F temas yüzeyine dik yönde, ismine “normal kuvvet”
deforme olur ve cisme,
A
diyeceğimiz
y ğ
birTkuvvet uygular.
yg
Bir masa üzerinde duran kütlesi m olan bir
S
U
blok düşünelim.
M
.
F R ma F mg 0 F mg
D
net,
t y
bulunur.
y
N
N
(5-8)
Sürtünme kuvveti: Bir cismi bulunduğu yüzey
M
I
R
I
üzerinde
ü
e de harekete
e e e zorlarsak
o s b
bir d
dirençle
e ç e karşılaşırız.
ş ş . LD
Bu direnç “sürtünme” olarak bilinir ve kayma
YI
A
eğilimine ters yöndedir.
L
Y
E
L
.
R
D
e
v
T
A
L
O
P
A
F
A
T
S
U
.M
R
D
(5-9)
G il
Gerilme:
Bir
i cisme
i
bağlı
b l olan
l ipte
i oluşan
l
bir
bi kuvvettir
k
IMi
ve şu özelliklere sahiptir:
R
I
D
L
YI
1. Her zaman ip boyunca yönelir.
2. Her zaman cismi çekecek yöndedir.
3. İp üzerinde A ve B noktalarında aynı büyüklüktedir.
.
R
S
U
D
M
.
R
A
L
Y
LE
D
e
v
Şu kabullenmeler
yapılacaktır:
T
A
L
O
a. İpin
kütlesi, bağlı oldukları cisimlerin kütlesine
P
göre
ö çokk küçüktür.
kü ük ü
A
F
A
T
b İp uzamasızdır
b.
uzamasızdır.
c. Makara
a a a kullanılması
u a
as durumunda,
du u u da, makara
a aa
sürtünmesizdir ve kütlesi ihmal edilebilir.
(5-10)
Newton yasalarını uygularken takip edilecek yol:
1. İncelenecek sistemin basit bir şeklini çizin.
2. Probleme uygun bir koordinat sistemi seçin.
A
L
3 Sistemdeki tüm kuvvetleri belirleyin ve serbest-cisim
3.
serbest cisim
Y
E
diyagramı üzerinde gösterin.
L
.
R
D
4. Newton yasalarını sisteme uygulayın.
e
v
T
A
L
O
P
A
F
A
T
S
U
M
.
R
D
M
I
R
I
D
L
YI
(5-11)
Örnek : Kütlesi 0.3 kg olan bir hokey diski sürtünmesiz bir yüzey üzerinde
k
kaymaktadır.
kt d Diske,
Di k şekildeki
kild ki gibi
ibi F1 = 5 N ve F2 = 8 N' lluk
k iki kuvvet
k
t
etkimektedir.
a) Diskin ivmesinin büyüklüğünü ve yönünü bulunuz.
b) Diskin ivmesini sıfır yapacak üçüncü kuvvet ne olmalıdır?
a ) a x
F
x
ay
m
Fy
5 cos(20) 8 cos(60)
29 m/s 2
03
0.3
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
m
5 sin(20) 8 sin(60)
17.4 m/s 2
0.3
2
x
2
y
A
L
a a a 29 17.4 33.8 m/s
O
P
17 4
17.4
tan (
) 31 A
F
29
A
T
ˆ
ˆ
S
b) a a i +a U
j 0 F F F F 0 F 5 cos(20)
(20) 8 cos(60)
(60) 88.7 N
M
F F F F 0 F 5 cos(20) 8 cos(60) 5.2 N
.
R
ˆ
ˆ
ˆ
ˆ
D
1
x
y
2
2
2
o
x
y
1x
1y
2x
2y
3x
3y
3x
3y
F3 F3x i + F3y j 8.7i 5.2j N
(5-12)
Örnek : Ağırlığı 125 N olan trafik ışıkları şekildeki gibi
M
I
R
iplerle asılı durmaktadır. Üstteki kabloların yatayla
o
I
D
L
YI
o
yp
yaptıkları
açılar
ç 37 ve 53 olduğuna
ğ
ggöre, her üçç teldeki
gerilme kuvvetlerini hesaplayınız. Hangi durumda
T1 T2 olur?
A
L
Y
E
L
Sistem dengede olduğuna göre, T F 125 N bulunur.
.
R
D
F T cos(37) T cos(53) 0 (Eş-1)
e
v
F T sin(37) T sin(53) T 0 T (Eş-2)
A
L
cos(53) O
0.8
TP=
T bulunur.
Eş-1' den: T
cos(37)
06
0.6
A
F
0.6
A
T 125 0 T 75.1 N
Bunu Eş-2' de yerine
koyarsak: T (0.6)
T
08
0.8
S
U
0.6
T . TM
99.9 N bulunur.
08
0.8
R
D
3
x
y
1
2
1
2
1
3
2
2
1
2
g
1
1
1
Eş-1' e göre, iplerin yatayla yaptıkları açılar aynı olsaydı, T1 T2 olurdu.
(5-13)
Örnek : Kütlesi m olan bir sandık, eğim açısı olan
sürtünmesiz eğik bir düzlem üzerinden serbest bırakılıyor.
aa)) Sandığın ivmesini bulunuz.
b) Sandık eğik düzlemin tabanına ne kadar sürede A
ulaşır
l
ve bu
b anda
d hhızı ne olur?
l ?
YL
M
I
R
I
D
L
YI
E
L
.
F
F
a )
R
D
x
mg sin max v
axe=g sin
y
N mg cos L0
A
F
O
P
T
A
1TA 2
b ) x x0 S a x t t
U 2
D
M
.
Rv 2 v 2 + 2a Δx
s
i
x
2d
bulunur
bulunur.
g sin
vs 2 g sin d olur.
(5-14)
Newton’un Üçüncü Yasası: Etki-Tepki Yasası
M
I
R
İki cisim arasındaki etkileşme kuvvetlerinin büyüklükleri aynı, doğrultuları
ters yöndedir.
A
L
Y
LE
Şekildeki gibi C bloğuna yaslanmış bir B cismi düşünelim.
C bloğunun B cismine uyguladığı kuvveti FBC , benzer şekilde
B cisminin C bloğuna uyguladığı kuvveti de FCB ile gösterelim.
.
R
Newton' un üçüncü
ç
yyasası ggereği,
ğ , FBC
A
F
S
U
D
M
.
R
A
L
O
P
I
D
L
YI
D
e
v
T F olur.
CB
A
T İkinci bir örnek ise yandaki şekilde verilmiştir.
Newton' un üçüncü yasası gereği,
FCE FEC
olur.
(5-15)
Newton Yasalarının Uygulanması/Serbest-Cisim Diyagramları:
Newton yasalarını uygulayarak mekanik
serbest-cisim diyagramını çizmekle başlar.
problemlerinin
M
I
R
çözümü
I
D
L
I yapılır.
Bu, incelenen sistem bir bütün olarak veya her cisim için ayrı Y
ayrı
A
L
Daha sonra her cisim için uygun bir koordinat sistemi Y
seçilir
seçilir.
E
L
.
Aşağıda verilen örneği gözönüne alalım. Sürtünmesiz
bir sistem
R
D
A ve B gibi iki blok ve A bloğuna etkiyen
bir F kuvveti içermektedir.
e
v
T
A
L
O
P
A
F
Şöyle "sistem" lerA
düşünebiliriz:
T
S
a. Sistem
Si t = blok
bl
k A + block
bl k B. Yatay
Y t kuvvet
k
tF .
U
M
.
b. System
= blok A. Cisme etkiyen iki yatay kuvvet vardır: F ve F .
R
D
c. System = blok B. Cisme etkiyen yatay kuvvet F .
dış
dış
dışş
BA
AB
(5-16)
Örnek : Kütleleri m1 ve m2 olan iki blok yatay sürtünmesiz bir
IM
düzlemde temas halindedir. m1 kütlesine sabit bir F kuvveti uygulanıyor.
a ) Blok sisteminin ivmesini bulunuz.
b ) Bloklar arasındaki temas kuvvetini bulunuz.
b
bulunuz
.
R
A
F
A
L
O
P
D
e
v
T
) F (m m )a
F (sistem
A
T
a )
x
S
U
1
2
A
L
Y
LE
R
I
D
L
YI
x
F
ax
m1 m2
b ) m2 bloğu için Newton' un ikinci yasasından:
D
M
.
R
m2
Fx F21 m2 ax F21 m m F F12 bulunur.
1
2
(5-17)
Örnek : Bir kişi elindeki m kütleli balığı asansörün
içinde ta
tavana
ana asılı yaylı
a lı bir tera
terazii ile tartmak istiyor.
isti or
Asansör ister yukarı ister aşağı doğru ivmelensin,
balığın gerçek kütlesinden daha farklı bir değer ölçer.
İspatlayınız.
İspatlayınız
Asansör yukarı doğru ivmelensin:
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
F
T
mg
ma
T
m
(
g
y
e a)
Asansör aşağı doğru
d
ivmelensin:
i
l iA
v
T
L
O
F
T
mg
ma
P T m(g a)
A
F
A
Asansör sabit hızla
hareket etsin:
T
S
T mg 0 T mg
FMU
.
R
Görüldüğü
gibi, ivmeli hareket durumunda balığın ağırlığı (T ),
D
y
y
gerçek ağırlığından farklı ölçülür.
(5-18)
Örnek : Kütleleri farklı iki cisim, ağırlığı ihmal edilebilir
sürtünmesiz bir makara üzerinden bir iple şekildeki gibi
asılmıştır. Bu sisteme "Atwood düzeneği" diyoruz. Sistem
serbest bırakıldığında, kütlelerin ivmesi ve ipteki gerilme
kuvveti ne olur?
m2 m1 olduğunu kabul edelim:
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
m1 ve m2 için Newton
Newton' un ikinci yasası
yasası, sırasıyla:
D
e
F
T
m
g
m
a
(Eş-1)
v
T
(Eş-2)
LA
F T m g m a O
P edersek ivme
Bu iki denklemden T' yi
yok
ivme,
A
F
m m A
a
ş de yerine
y
koyarsak,
y
,
gTbulunur. Bunu da Eş-1'
S
m m
U
M
.
m m
2m m
R
TD m a g m
1 g
b l
g bulunur.
y
1
y
2
2
1
2
1
1
1
2
1
2
1
m2 m1
1
2
m2 m1
(5-19)
Örnek : Kütleleri m1 ve m2 olan iki blok, sürtünmesiz ve
ağırlıksız bir makara üzerinden ağırlıksız bir iple birbirine
bağlıdır. m2 bloğu, eğim açısı olan sürtünmesiz eğik
düzlem üzerindedir
üzerindedir. Sistem serbest bırakıldığınd m2 bloğu
eğik düzlemden aşağıya doğru kaydığına göre, hareketin
ivmesini ve ipte oluşan gerilme kuvvetini bulunuz.
bulunuz
m1 ve m2 için Newton' un ikinci yasası, sırasıyla:
Fy T m1 g m1a
F
F
(Eş-1)
x'
m2 g sin T m2 a
y'
N m2 g cos 0
A
F
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
(Eş-2)
A
L
(Eş-3)
O
P
Eş-1 ve Eş-2 denklemlerinden T' yi yok edersek ivme,
A
T
m sin m1
a 2
bulunur
g bulunur.
m2 m1
S
U
M
.
R
2m1m2 1 sin
B
Bunu
da
d E
Eş-1'
1' dde yerine
i koyarsak,
k
k T
g bbulunur.
l
m2 m1
D
(5-20)
BÖLÜM-6
Kuvvet ve Hareket-II
M
I
R
I
D
L
YI
A
L
B bölüm
Bu
bölü kapsamındaki
k
d ki temel
t
l amaçlarımızı
l
şöyle
ö l Y
sıralayabiliriz:
l bili i
E
L
.
R
• İki cisim
i i arasındaki
d ki sürtünme
ü tü
k
kuvvetini
ti
i ttanımlamak.
l
k
D
e
v
T
• Statik
St tik ve kinetik
ki tik sürtünme
ü tü
k
kuvvetlerini
tl i i anlamak
l
k ve bunların
b l
A
L
özelliklerini öğrenmek. O
P
A
Fsürtünme katsayılarını tanımlamak.
• Statik ve kinetik
A
T
S
U
• Merkezcil
kuvvet açısından düzgün dairesel harekete tekrar
M
.
bakmak
bakmak.
R
D
(6-1)
Sürtünme : Yatay zeminde duran bir sandık düşünelim.
M
I
R
S d ğ sola
Sandığı
l ddoğru
ğ artan
t bi
bir kkuvvetle
tl çekelim.
k li S
Sandık
dk
I
D
L
YI
hareket etmediği sürece, temas yüzeyinde, uyguladığımız
F kuvvetini dengeleyen bir f s kuvveti oluşur. Bu kuvvet
A
L
Y de artar.
Uygulanan F kuvveti arttıkça, fEkuvveti
L
.
R
D
Uygulanan F kuvvetiebelli bir eşik değere ulaştığında,
v
T
hareket başlar ve
sandık sola doğru ivmelenir.
ivmelenir Sandık harekete
A
L
başladıktan
sonra, sandıkla zemin arasındaki kuvvet artık
O
P
"kiA tik sürtünme
"kinetik
ü tü
kuvveti
k
ti" dir
di ve f ile
il gösterilir
ö t ili ( f f ).
)
F
A
T
"statik sürtünme kuvveti" olarak tanımlanır.
s
k
S
U
D
M
.
R
k
s
Sandığın sabit bir hızla harekete devam etmesini istiyorsak,
uyguladığımız F kuvvetini f k ' yı dengeleyecek şekilde
düşürmemiz gerekecektir.
(6-2)
Sürtünmenin Kuvvetinin Özellikleri :
M
I
R
I
D
Özellik -1:
1: Temas eden iki yüzey birbirlerine göre hareketli değillerse,
değillerse
statik
L
I
Y
sürtünme kuvveti f , uygulanan F kuvvetini dengeler.
A
L
Y
E
L
Özellik - 2 : Statik sürtünme kuvveti f ' nin büyüklüğü
sabit değildir.
.
R
0' dan f
F değerine kadarDdeğişir.
e
v
Burada, statik sürtünme katsayısıdır.
T
Uygulanan F kuvveti,LA
f
kuvvetini aştığı anda
O
Pş
sandık harekete başlar.
A
F
A
T harekete başladıktan sonra, sürtünme kuvveti artık
Özellik - 3 : Sandık
S
U
M "kinetik sürtünme kuvveti" f ' dır ve büyüklüğü f F
.
R
eşitliği
i liği ile
il verilir.
ili Bu
B rada
d kinetik
ki ik sürtünme
ü ü
katsayısıdır.
k
d
D
s
s
s ,max
s
N
s
s ,max
k
k
k
N
k
(6-3)
f s ,max s FN
0 f s s FN
A
L
Y
EN
f k k F
L
.
R
D
e
v
T
M
I
R
I
D
L
YI
A
L
Not - 1 : Statik ve kinetik sürtünme
kuvvetleri temas yüzeyine paraleldir.
O
P harekete ters yöndedir.
Kinetik sürtünme kuvveti
yöndedir
A
F
A
kuvveti kayma eğiliminin tersi yönündedir.
Statik sürtünme
T
S
U
M
.
Not - 2: Kinetik sürtünme katsayısı , hareket eden cismin hızına bağlı değildir.
R
D
k
(6-4)
Örnek : m kütleli bir blok sürtünmeli eğik bir düzlem üzerindedir.
Eğim açısı , blok hareket edinceye kadar artırılabiliyor.
I
Bloğun kaymaya başladığı kritik açı k olduğuna göre, ILD
Y
zeminle blok arasındaki statik sürtünme katsayısı A
s nedir?
L
Y
E
L
Kritik durumda
.
R
D
(kayma başlamadan hemen önce):
e
v
T
A
L
ma x 0
Fx mg sin fPs O
A
F y N Tmg
AFcos ma y 0
S
N
U
f s mg
sin
sin N tan
M
.
cos
R
fD
s,max N tan k s N s tan k
M
I
R
(6-5)
Örnek : Donmuş bir gölet üzerinde, bir buz hokeyi
diskine 20 m/s' lik bir ilk hız veriliyor. Disk, buz
üzerinde 115 m yol aldıktan sonra durduğuna göre,
zeminle hokey diski arasındaki kinetik sürtünme
kaysayısı k nedir?
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
F y N mg ma y 0 T ve N mg
A
L
Fx f k max PO
f k k N k mg FA
ax k g
A
T
2
S
20
40
2
2
U
vs vi M
2ax x ax
.
( )
23
2(115)
R
D
ax k g k (9.8) k 0.177
(6-6)
Örnek : Pürüzlü bir yüzey üzerindeki m1 kütleli blok,
hafif bir iple sürtünmesiz
sürtünmesi vee kütlesi ihmal edilebilir bir
makara üzerinden m2 kütleli küresel cisme bağlanmıştır.
M
I
R
I
D
L
YI
m1 bloğuna şekildeki gibi yatayla açısı yapan bir F
A
L
Y
sürtünme katsayısı ise, sistemin ivmesini bulunuz.E
L
.
R
D
m bloğu: F F cos T ve
f m a (1)
T
A m g 0 N m g F sin
FL
sin
F N O
P
f k k NA k m1 g F sin
i
F
A
T
S
m bloğu: F T m g m a
U
M
.
F ((cos sin ) g (m m )
R
B if
Bu
ifadeleri
d l i (1) denkleminde
d kl i d yerine
i koyarsak,
k
k a
D
kuvveti uygulanıyor. Blok ile zemin arasındaki kinetik
k
x
1
k
y
2
y
1
1
2
1
2
k
2
(m2 m1 )
k
1
(6-7)
Örnek : Kütlesi 40 kg olan bir kalas sürtünmesiz yatay
düzlemde, üzerinde 10 kg' lık blok ile birlikte hareketsiz
durmaktadır. Blok ile kalas arasındaki statik ve kinetik
M
I
R
I
D
L
YI
sürtünme katsayıları sırasıyla 0.6 ve 0.4' tür. Bloğa 100
N' luk bir F kuvveti şşekildeki ggibi uygulanmaktadır.
yg
Bloğun
ğ ve kalasın
ivmelerini bulunuz.
.
R
A
L
Y
LE
D
e
v
T
Eğer iki kütle arasındaki sürtünme kuvvetinin maksimum değeri 100 N’
dan küçük
ç ise m2 bloğu
ğ kalas üzerinde sola doğru
ğ hareket edecektir.
A
L
O
f
N ' m gP
0.6(10)(9.8)
( )( ) 58.8 N
A
F göre, iki kütle arasındaki sürtünme
F f
olduğuna
A
T
S
k
kuvveti
ti kinetiktir.
kiU tikti
M
.
R
D
s ,max
max
s
s
2
s ,max
(6-8)
Şimdi herbir kütlenin serbest cisim diyagramını çizerek
h k tl i i inceleyelim:
hareketlerini
i l li
N ' m2 g 10 9.8 98 N
f k k N ' 0.4 9.8 39.2 N
m1 kalası: m1a1 f k
39.22
39
a1
0.98 m / s 2
40
A
L
O
P
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
m2 bloğu: m2 a2 FFA f k
A
T
100
39.2 60.8
S
6 08 m / s
a U
6.08
10
10
M
.
2
2
R
D
(6-9)
Düzgün Dairesel Hareket, Merkezcil Kuvvet:
M
I
R
Düzgün dairesel hareket yapan bir cismin herhangi
bir andaki ivmesinin büyüklüğü
a = v2/r
I
D
L
YI
A
L
di ve dairenin
dir
d i i merkezine
k i doğrudur.
d ğYd
E
L
.
Newton’ nun ikinci yasasına göre cismeRetki eden kuvvet
Newton
D
de dairenin merkezine doğrudur ve büyüklüğü
e
v
T
mv
A
F
L
r
O
P
A kuvvete “merkezcil kuvvet” diyoruz.
ifadesi ile verilir.FBu
A
T
MerkezcilSkuvvet yeni bir kuvvet değildir,
değildir C noktası etrafında
U
dönen
cisme
etkiyen net kuvvettir.
M
.
R
D
göre
ö merkezcil
k il kuvvet
k
b
bazen
sürtünme,
ü ü
b
bazen
normal,
l
D Duruma
2
bazen de yer-çekimi kuvveti olabilir.
(6-10)
Örnek: Kütlesi m olan bir yarış arabası düz (yatay) bir yolda R yarıçaplı
bir virajı v hızıyla dönmek istiyor.
istiyor Araba ile yol arasındaki sürtünme
kuvvetini belirleyiniz.
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
A
L
O
Py g
diyagramı
Arabanın serbest-cisim
ççizilirse,, virajın
j merkezine doğru
ğ
olan net kuvvetin statik sürtünme kuvveti fs olduğu görülür.
Dolayısıyla, statik sürtünme kuvveti fs merkezcildir. Arabanın virajdan
savrulmadan dönmesini sağlar.
A
F
S
U
D
M
.
R
A
T
mv
Fnet ,r fs
R
2
(6-11)
Örnek : Eğimli viraj :
M
I
R
Tamamen buzla
T
b l kaplı
k l (sürtünmesiz),
( ü tü
i ) 50 m
yarıçaplı bir viraji 13.4 m/s hızla geçmek için,
yolun eğim açısı kaç derece olmalıdır?
.
R
A
L
Y
LE
I
D
L
YI
Araba
D
e
v
T
A
L
mv O
F N sin AR P ((1 )
F
F
N
co
s
m g 0 N co s m g (2 )
A
T
S
(1 ) ve (2 U
) d en k lem lerin d en N ' yi yo k ed ersek ,
Mv
(1 3 .4 )
.
tanR
0 .33 6 6 4 2 0 .1
1
gR
(9 .8)(5 0 )
D
2
r
y
2
b u lu n u r.
2
o
(6-12)
Örnek: Rotor, ekseni etrafında v hızıyla dönen R
yarıçaplı içi boş bir silindirdir.
silindirdir Kütlesi m olan bir çocuk,
çocuk
sırtı silindirin iç duvarına yaslanmış bir şekilde ayaktadır.
Silindir dönmeye başlıyor ve önceden belirlenmiş bir hız
değerine ulaştığında, silindirin tabanı aniden düşmesne
rağmen çocuk silindir duvarında tutulu kalmaktadır.
Rotor
duvarıyla çocuk arasındaki statik sürtünme
katsayısı μs olduğuna göre, Rotor’ un minimum hızı ne
olmalıdır.
l ld
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
Çocuk için serbest-cisim diyagramı çizilirse, normal kuvvet F ’
T
nin
i merkezcil
k il kuvvet
k
olduğu
ld ğ görülür.
ö ülü
A
L
O
mv
P
F F ma
=
(Eş
(Eş-1)
1)
A
R
F
A
Tf mg 0,
F
f F mg F (Eş-2)
S
U
M
mv
Rg
Rg
.
Eş-1
ş Rve Eş-2
ş bbirleştirilirse,
eş
se, mg
v
v
bu
bulunur.
u u.
R
D
N
2
x ,net
N
y ,,net
s
s
s
2
s
N
s
N
2
min
s
s
(6-13)
Örnek: Çember şeklindeki platformun
yarıçapı R’ dir. Platformun en tepesinde
sürücünün düşmemesi için o andaki v hızı ne
olmalıdır.
M
I
R
A
L
Y
E
Sürücü platformun tepesinde iken serbest-cisim
L
.
diyagramını çizersek,
çizersek sürücüye etki edenRyer
yer-çekimi
çekimi
D
kuvveti Fg ve normal kuvvet FN aşağı yöndedir.
e
v
T
A hıza sahip olması
O noktada sürücünün minimum
L
O
durumunda, platformla teması
kesilir ve FN = 0 olur.
P
Bö l
Böylece,
sürücüye
üü ü
etki
tki eden
d
t k kuvvet
tek
k
t Fg’ dir
di ve
A
F
merkezcildir. Bu durumda,
A
T
S
U
mv
F . M
mg
v Rg
R
R
D
bulunur.
net , y
2
min
I
D
L
YI
min
(6-14)
Örnek : Kütlesi 0.5 kg olan bir taş, 1.5 m uzunluğundaki bir ipin
ucuna bağlanmış ve yatay bir düzlemde döndürülmektedir. Taşın RIM
I
D
bağlı olduğu ip en fazla 50 N
N' luk bir kuvvete dayanabildiğine L
göre,
I
Y
ipin kopmadan hemen önceki hızı ne olur?
A
.
R
A
F
S
U
mv
.M
TR
D
r
2
A
L
O
P
L
Y
LE
D
e
v
T
A
T
v m ax
rT m ax
m
1.5(50)
12.2 m /s
0.5
(6-15)
Örnek : Kütlesi m olan bir cisim L uzunluğundaki bir ipin ucunda
şekildeki gibi yatayda r yarıçaplı çembersel bir yörüngede v hızı
ile dönmektedir (Konik sarkaçç)). Cismin hızını bilinen nicelikler
cinsinden ifade ediniz.
T cos mg
mv
Tsin =
r
.
R
2
A
F
S
U
A
Tv
ta n
D
M
.
R
v
g r ta n
A
L
O
P
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
2
gr
g L s in ta n
(6-16)
Örnek : Kütlesi m olan bir cisim uzunluğu R olan
M
I
R
bir ipin ucunda, şekildeki gibi düşey düzlemde
O noktası etrafında dönmektedir. İpin düşeyle
açısı yaptığı bir anda cismin hızı v ise, ipteki
gerilme kuvveti ne olur?
g
.
R
Teğetsel kuvvet
A
L
Y
LE
I
D
L
YI
D
e
v
F mg sin ma a g Tsin (hızdaki değişimin kaynağı)
A v
L
O
F T mg cos ma
P T m R g cos
A
F
Radyal kuvvet
A
T
v
S
Üst noktada
( 180 ) T m g
U
M
R
.
R
v
D
Alt noktada ( 0 ) T m
g
t
t
t
2
r
r
2
o
o
üst
2
alt
R
(6-17)
Örnek : Kütlesi m olan bir cisim, sağa doğru ivmeli hareket yapan bir yük
vagonunun içinde tavana asılıdır
asılıdır.
M
I
a) Vagonun dışındaki durgun bir gözlemciye göre aracın ivmesi nedir?
IR
D
L
b )V
b
Vagonun içindeki
i i d ki bir
bi gözlemciye
öl
i göre
ö ddurumu iinceleyiniz?
l i i ?I
Y
A
L
Y
E
a ) Fx T sin ma
L
.
R
D
Fy T cos mg
e
v
T
a g tan
A
L
O
P
A
F
A
b ) F ' T sin
f
0
T
S
' U
T cos mg
FM
.
f
mg tan ma
R
D
x
hayali
y
hayali
(6-18)
BÖLÜM-77
BÖLÜM
Kinetik Enerji ve İş
Bu bölümde şu konulara değineceğiz:
A
L
Y
LE
M
I
R
I
D
L
YI
.
Hareket eden bir cismin kinetik
enerjisi
R
D
Bir kuvvetin yaptığı iş e
v
Güç
T
A
L
O
P
A
Ek olarak, iş-kinetik enerji
teoremini öğrenip değişik problemler çözeceğiz.
F
A
T
S
Hız ve ivme gibi vektörel nicelikler yerine iş ve kinetik enerji gibi skaler
U
nicelikleriM
kullanarak problemleri çözeceğimiz için, bu yöntemle işlemler
. olacaktır
daha R
kolay
olacaktır.
D
(7-1)
Kinetik Energy:
Bir cismin hızından dolayı
y sahip
p olduğu
ğ enerjidir.
j
Hızı v, kütlesi m olan bir cismin kinetik enerjisi
şu ifadeye sahiptir:
M
I
R
I
D
L
I
Y
SI sistemindeki birimi
1
A
g L/s = jjoule
kg.m
K mv
Y
2
ve sembolik
olarak J ile gösterilir.
E
L
.
R
Kütl i m = 1 kg
Kütlesi
k olan
l bir
bi cisim
i i v = 1 m/s
/ hızına
h
sahipse,
hi
ki tik enerjisi
kinetik
ji i K = 1 J’ dür.
dü
D
e
v
İşş ((W):
) Kütlesi m olan bir cisme bir FTkuvveti uygulandığında
yg
ğ
cisim ivmelenir
A (K) artırabilir veya azaltabilir.
ve hızını (v) dolayısıyla da kinetikLenerjisini
O
P değişim miktarı,
Cismin kinetik enerjisindeki
miktarı F kuvveti tarafından cisme
A
Fdışarıya alınan enerji (W) kadardır.
aktarılan veya cisimden
A
T
S
Ci
Cisme
enerji
ji aktarılmışsa
kt l
W pozitiftir
itifti (W > 0) ve F kuvveti
k
ti cisim
i i üzerinde
ü i d pozitif
itif
U
iş yapmıştır
denir.
M
.
Ak iR cisimden
Aksine,
i i d dışarıya
d
enerji
ji alınmışsa
l
W negatiftir
tifti (W < 0) ve F kuvveti
k
ti
D
cisim üzerinde negatif iş yapmıştır denir.
2
2 2
(7-2)
İş:
Şekilde kütlesi m olan cisim sürtünmesiz bir yüzeyde
x-ekseni yönünde hareket edebilmektedir.
Cisme yatayla açısı yapacak şekilde bir F kuvveti uygulanıyor.
M
I
R
I
D
L
YI
A
L
Y
Newton' un ikinci yasası gereği: F ma ' dır. Cismin başlangıçtaki
hızının v
E
L
ve d kadarlık bir yer-değiştirme sonundaki hızının .da v olduğunu varsayalım.
R
D
ev v 2a d eşitliğinden,
Kinematiğin üçüncü denklemi:
v
T
A
L
m F
m
m PO
m
v v 2a d 2 d F d F cos d
2 m
2
2A
2
F
A
1T
1
S
KU mv ; K mv K =K K Fd cos
2
2
M
.
W K W Fd cos W F d
R
D
x
x
0
2
2
i
2
0
2
0
s
x
2
s
2
0
x
x
x
s
i
İşin birimi, kinetik enerjinin birimiyle aynıdır (J).
(7-3)
M
I
R
Not-1: İİş iiçin
i bulunan
b l
bağıntıyı,
b
F kkuvvetinin
i i sabit
bi olduğu
ld
d
durum
için
i i türettik.
ik
Not-2: Cismin noktasal olduğunu kabul ettik.
N t 3 0 90 W 0 ; 90 180 W 0
Not-3:
I
D
L
YI
A
L
Y
E
NET İŞ: Cisme birden fazla kuvvet etkiyorsa (örneğin
L F , F ve F ),
.
R
net iş (W )'
) in hesaplanması:
D
e
v
T
A (W , W ve W ) ayrı ayrı hesaplanır ve
Yol-1: Herbir kuvvetin yaptığıLişler
sonra da toplanır (P
WO W W W ).
A
F
A
T
Yol 2: CisimS
Yol-2:
üzerine etki eden net kuvvet (F F F F ) bulunur ve
U
M
sonra da net kuvvetin yaptığı iş hesaplanır (W F d ).
.
R
D
A
B
C
net
net
A
A
B
C
B
C
net
A
B
net
C
net
(7-4)
Örnek : xy -düzlemindeki
düzlemindeki bir cisim F 5.0i
5 0iˆ + 2.0j
2 0jˆ (N)
kuvvetinin etkisiyle d 2.0iˆ + 3.0jˆ (m) ile verilen bir
yer-değiştirme yapıyor.
a)) Kuvvetin yyaptığı
p ğ işi
ş
M
I
R
I
D
L
YI
A
L
Y
E açıyı bulunuz.
b) Kuvvetle yer-değiştirme vektörü arasın
daki
L
.
R
D
e
v
a ) W F d (5
(5.0)
0) A(2.0)
(2
(2 0) (3.0)
(3 0) 16 J
T 0) (2.0)
L
O
P 29 13 cos
b ) F d Fd cos
A
F
A
1 T16
cos S(
) 35o
U
377
M
.
R
D
(7-5)
Örnek : İki blok hafif bir iple, sürtünmesiz ve
ağırlıksız bir makara üzerinden birbirlerine
bağlanmıştır.
ğ
ş Sistem serbest bırakıldığında,
ğ
,
fk
T
I
D
L
YI
M
I
R
T
bloklar sabit hızla hareket etmektedirler.
A
L
A bloğu sağa doğru
doğru, B bloğu aşağı doğru 75 cm hareket
ettiğinde,
ettiğinde
Y
E
L
bloklara etkiyen kuvvetlerin yaptıkları işleri.bulunuz.
Hız sabit ise ivme sıfırdır.
R
D
e
v
Blok A: F T f T
0
T f 12N
A
TL 12 0
Blok B: F O
P
A
Blok A: W 12 (0.75)
cos(0) 9 J ; W 12 (0.75) cos( ) 9 J
F
A
W 20T (0.75) cos( /2) 0 ; W 20 (0.75) cos( /2) 0
S
U
Blok B: M
W 12 (0.75) cos( ) 9 J ; W 12 (0.75) cos(0) 9 J
.
R
N
Not:
t
kt sabit
bit hızla
h l hareket
h k t ettiği
ttiği iiçin,
i hher iki bl
blok
k üüzerine
i etki
tki
D HHer iki blblokta
x
k
k
y
T
fk
g
mg
N
T
mg
eden kuvvetlerin yaptığı net iş=0’ dır.
(7-6)
İş - Kinetik Enerji Teoremi :
M
I
R
I
D
L
YI
Bir cisim üzerine yapılan net işin Wnet K s K i olduğunu daha önce
bulmuştuk.
A
L
Y
E dikkate alınırsa,
Kinetik enerjideki değişimin de K K K Lolduğu
.
R
iş kinetik enerji teoremi:
iş-kinetik
D
e
v
T
K KLAK W
O
P
A
kinetik
Bir cismin F
= Cisim üzerinde yapılan net iş
A
enerjisindeki
j T
değişim
ğ
S
U
M
W 0 K K 0K K
.
R
W 0 K K 0K K
D
s
s
i
i
net
net
s
i
s
i
net
s
i
s
i
(7-7)
Örnek : Kütlesi 6 kgg olan bir blok sürtünmesiz
bir düzlemde duruyorken, 12 N' luk sabit bir
yatay kuvvetin etkisiyle harekete başlıyor.
başlıyor Blok
yatayda 3 m yol adıktan sonra hızı ne olur?
A
L
Y
LE1
M
I
R
I
D
L
YI
W = F d = 12 3 cos(0) = 36 J K s K.i mvs2 0 36 J
R
2
D
e
v
72
vs
12 3.5 m/s
T
6
LA
O
P
A
Aynı problemi kinematikten
yola çıkarak tekrar çözelim:
F
S
U
A
T
12
2
F
12
ma
a
2
m/s
M
x
x
x
6
.
R
Dvs2 vi2 2ax x 2 2 3 12 vs 12 3.5 m/s
(7-8)
Örnek : Kütlesi 6 kg olan bir blok kinetik sürtünme katsayısı k = 0.15 olan
M
I
R
bir düzlemde
bi
d l d dduruyorken,
k 12 N' lluk
k sabit
bi bir
bi yatay kkuvvetin
i etkisiyle
ki i l hharekete
k
başlıyor. Blok yatayda 3 m yol adıktan sonra hızı ne olur?
W = F d = 12 3 cos(0) = 36 J
A
L
Y
LE
( F' nin yaptığı iş)
.
R
I
D
L
YI
f k k mg 0.15 6 9.8 8.82 N
W f f k d k mg cos( ) = 8.82 3 = 26.5 J ( f k ' nın yaptığı iş)
D
e
v
T
W W f 36 26.5
26 5 99.5
5
A
L
1
1
1 O
19
W W mv mv Pmv 9.5 v
1.8 m/s
2
2 A 2
6
F yola çıkarak tekrar çözelim.
A
Aynı problemi kinematikten
T
S
U
3.18
M
FR. 12 f 12 8.82 = 3.18 = ma a 6 0.53 m/s
D
v v 2a x 2 0.53 3 3.18 v 3.18 1.8 m/s
2
s
f
x
2
s
k
2
i
x
2
i
2
s
s
x
x
s
2
(7-9)
Yerçekimi Kuvvetinin Yaptığı
p ğ İş :
M
I
Kütlesi m olan bir cism A noktasından v ilk hızıyla
R
I
D
yukarı doğru fırlatılsın.
fırlatılsın
L
YI
Cisim yükseldikçe, yer-çekimi kuvveti (L
FA
mg ) tarafından
Y
E bir v hızına sahip olur.
yavaşlatılır ve B noktasında dahaL
düşük
.
R
D
Cisim A noktasından B noktasına
giderken,
e
v
yer-çekimi kuvvetinin yaptığı iş:
T
A
L
W A O
B F .d mgd cos180 mgd
P
A
F A noktasına dönerken,
Cisim B noktasından
A
T tarafından yapılan iş:
yer-çekimi kuvveti
S
U
M
.
R
W
D B A F .d mgdd cos 0 mgdd
0
g
g
g
g
g
(7-10)
Yükseltme Kuvvetinin Yaptığı İş :
M
I
R
Kütlesi m olan cismi bir F kuvvetiyle (dış kuvvet) A noktasından
B noktasına y
yükseltmek isteyelim.
y
Cisim harekete başladığı
ş ğ
I
D
L
I
Y
A noktasında ve ulaştığı B noktasında durgun olsun. Bu
A
L
aralıkta uygulanan F kuvvetinin sabit olması
gerekmiyor.
gerekmiyor
Y
E
L
.
R
Cisme etki eden iki kuvvet vardır.
vardır Biri
yerçekimi kuvveti F , diğeri
D
edışardan uyguladığımız F kuvvetidir.
de cismi yukarı kaldırmak için
v
T
A
W K 0 L
W W 0 W W
O
P mgd
W mgd cos180
W mgd
A
F
A
T
S
Al lt
Alçaltma
K
Kuvvetinin
ti i Y
Yaptığı
t ğ İş
İ :
U
M cisim B noktasından A noktasına hareket etmektedir.
Bu durumda
.
WDR
mgd cos 0 mgd W W = mgd
g
net
dış
g
dış
g
g
g
dış
dış
g
(7-11)
Değişken K uvvetin Yaptığı İş :
Şekilde konuma bağlı olarak değişen bir F kuvveti
Şekilde,
M
I
R
verilmiştir. Bu kuvvetin x ile x noktaları arasında
I
D
L
yaptığı
t ğ iişii ( W ) bbulmak
l k iisteyelim.
t
li
YI
Bunun için x , x aralığı, genişliğiLAx olan N tane
Y
ince şerite bölünür.
E
L
.
R
D
j. aralıkta yapılan v
işe W F x kadardır.
T
A
L
Bu durumda
toplam iş, W F x olur.
O
P
A
x
0 (N ) durumunda,
F
A
T
i
i
s
s
j
j , ort
N
j 1
S
U
R
D
.M
N
xs
j 1
xi
j , ort
W lim Fj ,ort x F ( x)dx
x 0
xs
W F ( x)dx F ( x) x grafiği altında kalan alan
xi
(7-12)
Örnek : Bir cisim üzerine etkiyen kuvvetin cismin
k
konumuna
bbağlılığı
ğl l ğ şekildeki
kild ki gibidir.
ibidi
a ) x = 0 8 m,
b ) x = 8 12 m
A
c ) x = 0 12 m
L
Y
aralıklarında bu kuvvetin yaptığı işi bulunuz. LE
M
I
R
I
D
L
YI
.
R
a ) W08
D
8 v6e
=F
( x)dx =F
( x)dxAT 2 = 24 J
L
O
P
A
4(
3)
= F ( x)A
dxF F ( x)dx =
= 6 J
2
T
S
U
M
b ) W812
xs
8
xi
0
xs
12
xi
8
x = 0 - 8 m aralığıdaki
üçgensel bölgenin alanı
x = 8 - 12 m aralığıdaki
üçgensel bölgenin alanı
c ) W .=
W0 8 W8 12 24 6 18 J
R
D
(7-13)
Örnek : Bir cisme etkiyen kuvvet, x metre cinsinden olmak üzere,
F = (8 x 16) N ifadesine göre değişmektedir.
IM
R
I
D
L
YI
a ) x = 0 3 m aralığında kuvvetin yaptığı işi bulunuz.
A
L
b ) Kuvvet-konum
Kuvvet konum grafiğini çiziniz ve x = 0 Y
3 m aralığında
E
L
kuvvetin yaptığı işi grafikten bulunuz..
R
D
xe
a ) W = F ( x)dx = (8 x 16)dx 8 v 16 x 12 J
T
2
A
L
O
P
A
F
A
T 2((16)) 1 8
S
b) W =W
W U+W =
= 12 J
2
2
M
.
R
D
xs
3
xi
0
0 2
2
3
0
23
(7-14)
Örnek : F = ((4xˆi + 3yyˆj) N' luk kuvvetin etkisindeki bir cisim
M
I
orijinden başlayarak x =5 m noktasına hareket etmektedir.
R
I
D
L
K
Kuvvetin
ti yaptığı
t ğ işi
i i bbulunuz.
l
YI
A
L
Y
ˆ
ˆj
E
W = F dr = ; dr dxi +
dy
L
.
R
D
r
e
v
W = (4 xiˆ A3T
yjˆ).(
) (dxiˆ dyjˆ)
L
r
O
r P
5
0
A
WF= (4 xdx 3 ydy ) 4 xdx 3 ydy
A
T r
0
0
S
U
2 5
M
x
.
W = 4 50 J
R
D
2 0
rs
ri
s
i
s
i
(7-15)
Yay Kuvveti :
Denge durumundaki bir yaya (uzamamış veya
sıkışmamış yay) bir blok bağlı bulunsun.
M
I
R
I
D
L
I doğru
Yayı d kadar gerecek şekilde bloğuYsağa
Aters doğrultuda
bir miktar çekelim. Yay elimize
L
Y
bir direnç kuvveti (F ) uygular.
E
L
.
R
Yayı d kadar sıkıştıracak
şekilde bloğu sola doğru
D
e yine ters doğrultuda bir direnç
itersek, yayvelimize
kuvvetiT
(F ) uygular
uygular.
A
L
O
Her iki durumda da,, yyay
yP
tarafından elimize uygulanan
yg
F kuvveti yayı
yy
A
F
doğal uzunluğuna
getirecek
yönde etkir. Büyüklüğü ise, uzama veya
A
T
S
sıkışma miktarı (x) ile orantılıdır.
orantılıdır
U
M
.
Eşitlik
olarak F kx bağıntısı
ğ
ile verilir. Bu eşitlik "Hooke y
yasası" ,
R
D
k ise "yay sabiti" olarak bilinir.
(7-16)
Yay Kuvveti Tarafından Yapılan İş :
M
I
R
Yay sabiti k olan bir yayın boyunu, kuvvet uygulayarak
xi ' den xs ' ye getirmiş olalım. Yayın elimize uyguladığı
I
D
L
kuvvetin yaptığı işi (W ) hesaplamak isteyelim.
YI
A
L
Y
Yayın kütlesiz olduğunu ve Hooke yasasına
uyduğunu varsayalım.
E
L
.
R
D
Değişken kuvvetin yaptığı iş bağıntısından,
e
v
T
x
1
1
A
W F ( x ) dx kxdx L
k xdx k kx kx
2
2
2
O
P
A
bulunur.
F
A
Tuzamasız durumda ise (x 0) ve yayı x kadar
Yay başlangıçta
S
U
germiş veya
M sıkıştırmış isek( x x), yay kuvvetinin yaptığı iş
.
R
1
D
W kx
olarak bulunur.
yay
xs
xs
xs
xi
xi
xi
2
xs
2
i
yay
2
s
xi
i
s
yay
2
2
(7-17)
Örnek : Kütlesi 1.6 kg olan bir blok, yay sabiti k = 1 10 3 N/m olan
M
yatay bir yaya bağlıdır. Yay 2 cm sıkıştırılıp durgun halden serbest
I
R
I
bırakılıyor. (Yüzey sürtünmesizdir).
D
L
YI
a ) Blok denge noktasından (x = 0) geçerken hızı ne olur?
A
L
bb ) Aynı soruyu
soruyu, sabit ve 4 N büyüklüğünde birYsürtünme kuvveti
E
L
olması durumunda tekrar cevaplayınız..
R
D
1 2 1
3
2 2 e
a) Wyay =kxm 110 2 10 v 0.2 J
2
2
T
A
L
2W
O
1
1
2(0.2)
W = mv mv vP=
=
= 0.5 m / s
2
2
m
16
1.6
A
F
A
b) W = f x S=T4 2 10 00.08
08 J sürtünme kuvvetinin yaptığı iş.
ş
U
M
.
1
2 (0.12)
R
0 2 00.08
08 v =
= 00.39 m / s
DK W W 2 mv 0.2
1.6
2
s
yay
f
2
i
s
2
k m
yay
yay
f
2
s
s
(7-18)
Örnek : Kütlesi 5 kg olan bir blok sürtünmesiz
bir yüzeyde,
bi
ü d yay sabiti
biti k = 500 N/
N/m olan
l
yatay bir yaya v0 = 6 m/s hızla çarpıyor ve
yayı sıkıştırıyor.
a ) Yaydaki sıkışma ne kadardır?
M
I
R
A
L
Y
LE
I
D
L
YI
b) Yay en fazla 15 cm sıkışabiliyorsa, v0 hızı
. en fazla ne olur?
R
D
1 2 1 2 1 ve2 1 2
a ) W yyayy = kxi kxm Tmvs mvi
2
2
2
2
A
L
1 2 1 2 PO
m
5
k m = mvi A xm =
kx
vi =
(6) = 00.6
6m
2
2 AF
k
500
T
S
U
b ) x . =M
R
D
m
m
k
500
vi vi = xm
(0.15) 1.5 m / s
k
m
5
(7-19)
Üç-Boyutlu Uzayda Kuvvetin Yaptığı İş :
M
I
R
I
Üç-boyutlu
Üç
boyutlu uzayda tanımlı bir F kuvveti genel olarak LD
I
Y
F F x, y, z ˆi F x, y, z ˆj F x, y, z kˆ
A
x
y
z
biçiminde tanımlanabilir.
.
R
L
Y
LE
D
Böylesi bir kuvvetin etkisinde, bir cismiekoordinatı
xi , yi , zi olan
v
T
A noktasından koordinatı xs , ys , zs olan B noktasına,
noktasına belirli bir
A
L
yol boyunca, hareket ettirmek
için yapılacak iş,
O
P
dW F dr F dx FFAdy F dz
A
T
S
W dW
d U F ddx F ddy F ddz
M
.
Rili
il Dverilir.
ile
x
B
xs
y
ys
x
A
xi
z
zs
y
yi
z
zi
(7-20)
Değişken Kuvvet ve İş - Kinetik Enerji Teoremi :
M
I
R
Değişken bir F (x ) kuvveti yardımıyla kütlesi m olan bir cismi D
A I( x xi )
L
I
noktasından B ( x x ) noktasına hareket ettirelim. Newton'
Y un ikinci
A
dv
L
Y
yasasına göre,
ö F ma m ' di
dir.
E
dt
L
.
R
D
Eşitliğin her iki tarafını dx ile çarpıpvxe ve x aralığında integralini alırsak,
T
Adv dv dx dv dv dx
dv
L
dx vdv
dx
O
Fdx m dt dx
P
dt dx dt
dt
dx dt
A
F
A
m
1
1
T
W m vdvS
v mv mv K K K bulunur.
2
2
2
U
M
.
NotR: Görüldüğü
ğ ggibi iş-kinetik
ş
enerji
j teoremi,
D kuvvetin sabit olduğu durum ile aynıdır.
s
i
xs
xs
xi
xi
xs
xi
2
xs
xi
2
s
s
2
i
s
i
(7-21)
Örnek : Kütlesi 0.1 kg olan bir blok hava-rayı üzerinde yay sabiti k = 20 N/m
olan yatay bir yaya bağlıdır
bağlıdır. Blok denge noktasından sağa doğru 11.5
5 m/s hızla geçiyor
geçiyor.
a) Hava-rayı sürtünmesiz ise, blok ne kadar sağa gidebilir?
M
I
R
I
b)) Hava
Hava-rayı
rayı sürtünmeli ise ( = 00.47),
47) blok ne kadar sağa gidebilir? LD
YI
A
1
1
1
1
L
a ) W = kkx kx
k mv mv
Y
E
2
2
2
2
L
.
R
1
1
m
01
0.1
D
kx = mv x =
v =
(1.5)
= 0.106 m
2
2
k
20e
v
T
A
b ) W =f
x = mg x Lsürtünme
kuvvetinin yaptığı iş.
O
1 P
1
K W W Amv kx mgx İş-kinetik
İ
enerji teorimi
F2
2
A
T 1
1
S
0 1 vU
(1.5)
(1 ) 20 x 0.47
0 4 00.1
1 99.8
8x
0.1
2 M
2
.
10
x
0.461x 0.113 = 0 x = 0.086 m 8.6 cm
R
D
k
2
i
yay
2
m
2
m
f
2
i
k
yay
m
m
k
2
i
i
m
2
i
f
2
2
m
2
s
2
m
2
m
m
k
m
m
m
(7-22)
Örnek : Salıncağa binmiş w ağırlığındaki bir çocuğu,
i l düşeyle
ipler
dü l 0 açısı yapana kadar
k d (burada
(b d çocuk
k
M
I
R
I
D
L
YI
durgundur) yatay bir F kuvvetiyle ittiğinizi düşünün.
Bunun için uygulamanız gereken kuvveti, sıfırdan
LA değere
başlayarak
ş y
ççocuk dengeye
g y ggelene kadar belirli bir maksimum
ğ kadar
Y
E işi bulunuz.
artırmanız gerekir. Uyguladığınız F kuvvetinin yaptığı
L
.
R
D 0 ; F = T sin
Denge durumunda : Fx = F Tesin
v
w
Fy L=ATTcos ağırlık
0 ; T w / cos
O
P
A
F = w tan AWF= F dl F ( Rd
) cos wR sin d
T
S
U
W =M
wR cos wR 1 cos
.
R
D
0
0
dl
0
0
0
0
0
(7-23)
Güç :
Gü F kkuvveti
Güç,
ti tarafından
t f d birim
bi i zamanda
d yapılan
l iş
i veya F kkuvvetinin
tiIM
i
R
I
D
L
I
Y
F kuvveti t zaman aralığında W kadar iş yapmışsaA
, ortalama güç
L
Y
W
E
P
L
.
t
R
D
e
Anlık güç ise
v
T
A
dW
L
P
O
ile tanımlanır.
P
dt
A
F
SI sistemindeki
birimi "J/s = watt" tır.
A
T"kilowatt
kilowatt-sa
saat" (kW) iş birimidir.
idir
S
U
M
.
Örneğin,
Ö
eğ , 1000
000 W gücündeki
gücü de bir
b motor
o o 1 saat
s sü
süreyle
ey e
R
D
iş yapma hızı olarak tarif edilir.
ort
çalışıyorsa yaptığı iş W =Pt =1000 3600 3600 kJ bulunur.
(7-24)
H Bağlı
Hıza
B ğl Gü
Güç İf
İfadesi
d i:
A
L
Y
E
açısı yapacak şekilde bir F kuvveti uygulayalım.
L
.
R
D
Uygulanan F kuvvetinin iş yapma hızı
e
v
T
A
L
dW F cos dx O
dx
P
F cos
Fv cos
P
dt
dt A
dt
F
A
ST
P F U
v
M
.
verilir.
R
D
Hareket eden bir cisme, hareket doğrultusu ile
M
I
R
I
D
L
YI
(7-25)
Örnek : Bir asansörün kütlesi 1000 kg' dır ve toplam
800 kg taşıyabilmektedir. Asansör yukarı çıkarken
M
I
R
I
D
L
YI
4000 N' luk sabit bir sürtünme kuvveti etkimektedir.
a) Asansör 3 m/s' lik sabit hızla yukarı çıkıyorsa,
A
L
b)) Asansör 1 m/s ' lik ivme ile yukarı çıkıyorsa,
b
çıkıyorsa Y
E
L
Asansör motorunun sağladığı güç ne olur? .
R
D
a) v sabit a 0 :
F
=
T
ve f w 0
T
T f w (1000 800) A
9.8
9 8 4000 22.16
16 10 N
L
O
2.16 10 3 6.48 10 W
P = T .v =
T v cos0 P
A
F
A
b ) a 0 :
F = T f Mg Ma
T
S
T fU
M ( g a ) 4000 1800*10.8 2.34 10 N
M
.
P = T .v = T v cos0 = 2.34
2 34 10 v W (burada v anlık hızdır)
R
D
2
y
4
4
4
y
4
4
(7-26)
BÖLÜM-8
Potansiyel Enerji ve Enerjinin Korunumu
Bu konu kapsamında şu konulara değineceğiz:
Potansiyel enerji
Korunumlu ve korunumsuz kuvvetler
Mekanik enerji
j
Mekanik enerjinin korunumu
Birçok
ço p
problemi
ob e “enerjinin
e ej
korunumu”
o u u u teo
teoreminden
e
de çö
çözeceğiz.
eceğ .
Burada vektörel nicelikler yerine iş, kinetik enerji ve potansiyel enerji gibi
skaler nicelikler kullanacağımız için işlemler daha kolay yapılabilecektir.
yapılabilecektir
(8-1)
İş ve Potansiyel Enerji:
Y
Yer-çekimi
ki i potansiyel
t i l enerjisi:
ji i
•
•
•
•
Kütlesi m olan bir cisim v0 ilk hızıyla A noktasından
yukarı doğru fırlatılıyor.
fırlatılıyor
Cisim ve yer bir sistemdir.
Yerçekimi kuvvetinin etkisiyle cisim yavaşlayarak
yükselecek ve B noktasında tamamen duracaktır.
duracaktır
Sonra da, aşağı doğru hareket ederek orijinal v0 hızıyla
A noktasına ulaşacaktır.
Cisim A noktasından B noktasına giderken Fg kuvvetinin yaptığı iş
W1 = mgh’
g dir. Bunun anlamı,, Fg kuvveti cismin kinetik enerjisini
j
yerçekimi potansiyel enerjisine (U) dönüşmüştür.
Cisim B noktasından A noktasına düşerken ise, Fg kuvvetinin yaptığı iş
W2 = mgh ’ dir. Bunun anlamı da, Fg kuvveti cismin yerçekimi potansiyel
enerjisini kinetik enerjiye dönüştürmüştür.
Sistemin potansiyel enerjisindeki değişim şu ifadeyle verilir:
U W
(8-2)
Yay potansiyel enerjisi:
•
Kütlesi m olan blok,
blok yay sabiti k olan bir yaya bağlıdır.
bağlıdır
•
Yay ve kütle bir sistemdir.
•
Herhangi
H
h i bir
bi anda
d A noktasından
kt
d geçerken
k ki hızı
h v0 olan
l
blok, yay kuvvetinin etkisiyle yavaşlayacak ve yayı x
kadar sıkıştırarak B noktasında tamamen duracaktır.
•
Sonrada, yay kuvvetinin etkisiyle ters yönde harekete
başlayacak ve A noktasından v0 hızıyla geçecektir.
Blok A noktasından B noktasına hareket ederken yay kuvveti Fyay tarafından
yapılan iş W1 = kx2/2’ dir. Bunun anlamı, yay kuvveti Fyay cismin kinetik
enerjisini
ji i i potansiyel
t i l enerjiye
ji (U) dönüştürmüştür.
dö ü tü ü tü
Blok B noktasından A noktasına hareket ederken ise, yay kuvveti Fyay tarafından
yapılan iş W2 = kx2/2
/2’ dir.
dir Bunun anlamı da,
da yay kuvveti Fyay cismin potansiyel
enerjisini kinetik enerjiye dönüştürmüştür.
Sistemin potansiyel enerjideki değişimi yine U W ifadesine sahiptir.
(8-3)
Korunumlu ve Korunumsuz Kuvvetler:
Cismin sadece kinetik ve potansiyel enerjileri
arasında bir dönüşüme neden oldukları için,
yerçekimi kuvveti ve yay kuvveti “korunumlu”
korunumlu
kuvvetlerdir.
Buna karşın, sürtünme kuvveti “korunumlu olmayan” bir kuvvettir.
Sürtünmeli bir yüzey üzerinde A noktasından v0 ilk hızıyla harekete
başlayan bir blok düşünelim. Blok ile zemin arasındaki kinetik sürtünme
katsayısı μk olsun. Blok, kinetik sürtünme kuvveti fk etkisiyle d kadar yol
aldıktan sonra B noktasında duracaktır.
A ve B noktaları arasında sürtünme kuvvetinin yaptığı iş Wf = μkmgd
olacaktır. Sürtünme kuvveti, bloğun tüm kinetik enerjisini “ısı
enerjisi” ne dönüştürmüştür. Bu enerji tekrar kinetik enerjiye
dö ü tü ül
dönüştürülemez
ve bu
b nedenle
d l sürtünme
ü tü
k
kuvveti
ti korunumlu
k
l bir
bi
kuvvet değildir.
(8-4)
1. Kapalı bir yol boyunca, korunumlu bir
kuvvetin bir cisim üzerinde yaptığı net iş
sıfırdır (Şekil-a).
Wnet 0
Yerden yukarı doğru fırlatılan taş ve kütle-yay
kütle yay sistemi buna
birer örnektir. Wnet = Wab,1 + Wba,2 = 0
2. a’dan b’ye giden bir cismin üzerine etki eden korunumlu
bir kuvvetin yaptığı iş gidilen yoldan bağımsızdır.
Şekil - a' dan : Wnet = Wab,1 + Wba,2 = 0
Wab,1 = Wba,2
Şekil - b' den : Wab,2 = Wba,2
W
W
abb,11 ab
b,2
2
(8-5)
Potansiyel Enerjinin bulunması :
Bir cisme etkiyen korunumlu kuvveti biliyorsak,
xi ve xs gibi iki nokta arasında cismin potansiyel
enerjisindeki değişimi (U ) hesaplayabiliriz.
Korunumlu bir F kuvvetinin etkisindeki bir cisim x-ekseni
boyunca xi noktasından xs noktasına hareket ediyor olsun.
F kuvveti tarafından cisim üzerinde yapılan iş
xs
W F ( x)dx eşitliği ile verilir.
xi
Böylece, potansiyel enerjideki değişim
xs
U W F ( x)dx bulunur.
xi
(8-6)
Yerçekimi Potansiyel Enerjisi :
Düşey doğrultuda (y-ekseni
ekseni boyunca) yukarı doğru yi noktasından
ys noktasına hareket eden m kütleli bir cisim düşünelim.
Cisme etki eden yerçekimi kuvveti nedeniyle cisim-yer sisteminin
potansiyel enerjisinde değişim olacaktır. Az önce bulduğumuz sonucu
kullanarak, cismin potansiyel enerjisindeki değişimi hesaplayacağız.
yf
ys
ys
yi
yi
yi
U F ( y)dy mg dy mg dy mg y y mg ys yi mg y
ys
i
Cismin bulunduğu son noktayı genelleştirirsek U ( y) Ui mg y yi
bulunur.
Genellikle hareketin başladığı konum yi 0 ve bu noktadaki
Genellikle,
potansiyel U i 0 olarak seçilir. Bu durumda,
U ( y ) mgy
bulunur.
(8-7)
Örnek : Yerden h kadar yükseklikten m kütleli
bir cisim serbest bırakılıyor. Cismin herhangi
bir andaki hızını, yerden olan yüksekliğine bağlı
olarak bulunuz.
K = U K s K i U s U i
Ki Ui Ks U s
1
m v s2 m g y
2
2 g (h y )
0 m gh
vs
(8-8)
Örnek : Şekilde L uzunluğundaki bir ipin ucuna
bağlı m kütlesinden oluşan bir basit sarkaç verilmiştir.
Cisim A açısal konumundan serbest bırakılmıştır ve
dönme ekseninin geçtiği P noktası sürtünmesizdir.
a ) Cisim en alt noktadan (B noktası) geçerken hızı nedir?
b ) Cisim en alt noktada iken ipteki gerileme kuvveti nedir?
b
1 2
a) Ki Ui K s U s mgh
h mvB vB 2 gL
L(1 cos A )
2
mvB2
TB mg 2mg (1 cos A )
b ) Fr TB mg
L
TB mg 3 2 cos A
(8-9)
Yaydaki Potansiyel Enerji :
Bir kütle-yay sisteminde,
sisteminde blok xi noktasından xs
noktasına hareket etsin. Yay kuvveti bir iş (W )
yapacaktır ve kütle-yay
kütle yay sisteminin potansiyel
enerjisinde bir değişim meydana gelecektir.
xs
xs
1 2 1 2
W F ( x)dx kxdx kxs kxi
2
2
xi
xi
1
1
U W U ( xs ) U i kxs2 kxi2
2
2
Genellikle hareketin başladığı konum xi 0 ve bu noktadaki
ppotansiyel
y U i 0 olarak seçilir.
ç
Denge noktasından herhangi bir x uzaklığında,
1 2
yaydaki potansiyel enerji: U kx
2
(8-10)
Mekanik Enerjinin Korunumu :
Bi sistemin
Bir
i
i mekanik
k ik enerjjis
i i, o sistemin
i
i kinetik
ki ik ve potansiyel
i l enerjilerinin
jil i i
toplamı olarak tarif edilir
(M k ik enerji
(Mekanik
ji = Emek K U )
Sistemin çevresinden izole olduğunu, dış kuvvetlerin olmadığını
ve sistemdeki kuvvetlerin ise korunumlu olduğunu kabul ediyoruz.
Sistemdeki iç kuvvetin yaptığı iş sistemin kinetik enerjisinde
bir değişim meydana getirecektir.
K W (Eş-1)
(Eş 1)
Bu, aynı zamanda sistemin potansiyel enerjisinde de bir
değişim meydana getirecektir
U W ((Eş-2).
ş ).
(8-11)
Bu iki eşitlik birleştirilirse,
K U
K s K i U s U i
Ki U i K s U s
sonucuna ulaşılır.
Bu "mekanik
Bu,
mekanik enerjinin korunumu"
korunumu yasasıdır ve şu şekilde özetlenebilir.
r
Emek. K U 0
Korunumlu ve korunumsuz kuvvetlerin olduğu izole bir sistemde bu yasa
Emek. Wkorunumsuz
f
formundadır.
d d
Burada Wkorunumsuz , sistemdeki tüm korunumsuz kuvvetler tarafından y
yapılan
p
işştir.
(8-12)
Şekilde m kütleli bir cisim ve asılı olduğu
ipten oluşan basit sarkaç verilmiştir.
Cisim-yer sisteminin mekanik enerjisi
sabittir. Sarkaç salındıkça, sistemin
kinetik ve potansiyel enerjileri
arasında sürekli bir dönüşüm olacaktır.
olacaktır
Cisim en alt noktadayken potansiyel
enerjiyi “sıfır” seçersek, bu noktalarda
kinetik enerji maksimum olacaktır
(a ve e durumu).
durumu)
c ve g durumlarında ise potansiyel
enerji
ji maksimum,
ki
ki ik enerji
kinetik
ji sıfır
f
olacaktır.
(8-13)
Örnek : Yaylı bir oyuncak tabancanın yay sabiti bilinmemektedir.
Yay 12 cm sıkıştırılıp düşey yönde ateşlendiğinde, 35 gg' lık bilye
atıldığı noktadan 20 m yukarıya yükseliyor. Tüm sürtünmeleri
ggözardı ederek,,
a) Tabancanın yay sabitini bulunuz.
b)) Bilye
y tabancayı
y hangi
g hızla terkeder?
c) Bilye atıldığı noktadan 10 m yukarıdayken hızı nedir?
1 2
2mgh
a) EA EC kx mgh k 2 953 N/m
2
x
1 2
1 2
k 2
b ) E A EB kx mgx mvB vB
x 2 gx 19.7 m/s
2
2
m
1 2
1 2
k 2
c ) kx mgh ' mvh ' vh '
x 2 gh ' 14 m/s
2
2
m
(8-14)
Örnek : İki blok hafif bir iple, ağırlıksız ve sürtünmesiz
bi makara
bir
k üzerinden
ü i d şekildeki
kild ki gibi
ibi birbirine
bi bi i bağlanmıştır.
b ğl
t
Sistem durgun halden serbest bırakılıyor. 5.00 kg' lık blok
yere çarptığında, 3.00 kg' lık bloğun hızı ne olur?
1
1
2
Ei Es m1 gh m2 gh m2v m1v 2
2
2
2 m1 m2 gh
2 2 9.8
9 8 4
v
19.6 4.43 m/s
8
m1 m2
(8-15)
Potansiyel Enerjiden Kuvvetin Bulunması :
Bilinmeyen bir F kuvvetinin etkisi altında x-ekseni boyunca hareket eden bir
cismin potansiyel enerjisinin konuma bağlılığı U (x) biliniyor olsun.
Cisim koordinatı x olan bir A noktasından koordinatı x + x olan çok yakındaki
bir B noktasına hareket etsin. Kuvvetin cisim üzerinde yaptığı iş
W F x
(Eş-1)
ile verilir.
Kuvvetin
K
ti yaptığı
t ğ bu
b iş,
i sistemin
i t i potansiyel
t i l enerjisinde
ji i d bir
bi değişim
d ği i meydana
d
getirir.
ti i
U W (Eş-2)
Bu iki eşitlik birleştirilirse,
dU ( x)
U
bulunur. x 0 durumundaki limit değeri ise F ( x)
F
x
dx
olur.
(8-16)
Potansiyel Enerji Eğrisi:
Cismin
Ci
i potansiyel
t i l enerjisinin
ji i i konuma
k
bağlı değişimini çizersek, F kuvvetinin
etkisi
altındaki
cismin
hareketi
konusunda detaylı bilgiler elde etmek
mümkün olur.
Ci
Cisme
etki
tki eden
d
k
kuvveti
ti aşağıdaki
ğ d ki
bağıntı yardımıyla konumun fonksiyonu
olarak bulabiliriz.
F ( x)
dU ( x)
dx
Örnek olarak yukarıdaki grafiği inceleyelim:
x2 , x3 ve x4 noktalarında potansiyel eğrisinin türevi sıfırdır. Dolayısıyla
bu noktalarda cisme etkiyen kuvvet de sıfır olur.
x2 ve x3 noktaları arasında dU/dx pozitif olduğundan, kuvvet –x yönündedir.
x3 ve x4 noktaları arasında dU/dx negatif olduğundan, kuvvet +x yönündedir.
(8-17)
Dönüm Noktaları :
Sistemin toplam mekanik enerjisi Emek. K ( x) U ( x).
Toplam mekanik enerji sabittir (5 J) ve yatay bir çizgi
ile gösterilmiştir. Herhangi bir x noktasında U ( x)
belirlenip yukarıdaki denklemde yerine konur ve cismin
K kinetik
ki tik enerjisi
ji i bulunabilir.
b l bili
Kinetik enerji, tanımı gereği negatif olamaz. Böylece cismin, x-ekseninin
hangi bölgesinde hareketli olduğunu belirleyebiliriz.
K ( x) Emek.
mek U ( x )
K 0 Emek U ( x) 0 U ( x) Emek.
Hareket izinlidir.
K 0 Emek U ( x) 0 U ( x) Emek.
Hareket yasaklıdır.
Emek. U ( x) olduğu noktalar, "dönüm noktaları" dır.
Yukarıdaki
k d ki grafiğe
fi göre, x1 ddönüm noktasıdır
k d ve bu
b noktada
k d K 0 'dır.
d
(8-18)
Yandaki grafikte Emek. = 4 J durumunu gözönüne alalım.
Buna göre dönüm noktaları (Emek. = U ) x1 ve
x > x5 noktalarıdır. x > x1 bölgesinde hareket
izinlidir Eğer mekanik enerjiyi 3 J veya 1 JJ’ e
izinlidir.
düşürürsek, dönüm noktaları ve hareketin
izinli olduğu bölge de değişecektir.
Denge Noktaları: Potansiyel enerji eğrisinde eğimin sıfır (dU/dx = 0) ve
y y da kuvvetin sıfır ((F = 0)) noktalar denge
g noktalarıdır. Kuvvetin
dolayısıyla
sıfır olduğu bölgeler de (x > x5) doğal denge bölgeleridir.
j y Emek.
ç
, kinetik enerji
j K = 0 olur ve cisim
Mekanik enerjiyi
mek = 4 J seçersek,
x > x5 bölgesinde hareketsiz olur.
Potansiyel enerji
enerji-konum
konum eğrisinde minimumlar,
minimumlar kararlı denge konumları,
konumları
Potansiyel enerji-konum
konumlarıdır.
eğrisinde maksimumlar,
kararsız
denge
(8-19)
Not: Şekil üzerindeki mavi oklar,
dU ( x)
F ( x)
dx
bağıntısı uyarınca cisim üzerine etkiyen
kuvvetlerin yönünü göstermektedir.
Kararlı Denge Konumları: Potansiyelin minimum olduğu x4 noktasını
gözönüne alalım. Mekanik enerji Emek. = 1 J olsaydı, bu noktada cisim
hareketsiz olacaktı (K = 0).
0) Cismi x4 noktasının çok az soluna veya sağına
çekersek, cismi denge noktasına getirmek için bir kuvvet oluşur. Bu nokta
kararlı denge noktasıdır.
Kararsız Denge Konumları: Potansiyelin maksimum olduğu x3
noktasını gözönüne alalım.
alalım Mekanik enerji Emek.k = 3 J olsaydı, bu
noktada cisim hareketsiz olacaktı (K = 0). Cismi x3 noktasının çok az
soluna veya sağına çekersek, her iki durumda da cismi bu noktadan
d h fazla
daha
f l uzaklaştıracak
kl
k şekilde
kild bir
bi kuvvet
k
oluşur.
l
B nokta
Bu
k kararsız
k
denge noktasıdır.
(8-20)
Örnek : Bir moleküldeki iki nötr atom arasındaki etkileşme kuvveti ile ilgili
potansiyel, Lennard-Jones
Lennard Jones potansiyel enerji fonksiyonu ile verilir:
12 6
U ( x ) 4
x
x
x atomlar arasındaki mesafe, ve ise deneysel sabitlerdir.
22
İki tipik
ti ik atom
t
için,
i i 0.265
0 265 nm ve 1.51
1 51 10 22
J' dür.
dü
Atomlar arasındaki etkileşme kuvvetini ve minimum uzaklığı bulunuz.
dU
d
Fx
= 4 12 x12 6 x6 = 4 12 12 x 13 6 6 x 7
dx
dx
12 12 6 6
Fx 4 13 7
x
x
12 12 6 6
Fx 4 13 7 0 x 21/6 0.3 nm
x
x
(8-21)
Örnek : İki boyutlu
y
uzayda
y bir kuvvetle bağlantılı
ğ
potansiyel
p
y enerji
j
fonksiyonu,
U ( x, y ) 3 x 3 y 7 x
ile veriliyor. Cisme etkiyen kuvveti bulunuz.
dU
d
3
2
Fx
= 3 x y 7 x = 9 x y 7
dx
dx
dU
d
Fy
= 3 x3 y 7 x = 3 x3
dy
dy
F Fx ˆi Fy ˆj 7 9 x 2 y ˆi 3 x3 ˆj
(8-22)
Dış Kuvvetin Bir Sistem üzerinde Yaptığı
p ğ İş:
Şu ana kadar, dış kuvvetlerin olmadığı izole
sistemleri ele aldık. Şimdi de, dış kuvvetlerin
etkidiği bir sistemi ele alalım.
Bir oyuncu tarafından fırlatılan bowling topunu göz önüne alalım.
Bowling topu ve dünya bir sistem oluşturur.
oluşturur
y
tarafından topa
p uygulanan
yg
kuvvet dışş kuvvettir. Bu durumda
Oyuncu
sistemin mekanik enerjisi sabit değildir, dış kuvvetin yaptığı iş kadar
değişir.
K U
W E
mek.
(8-23)
Örnek : Uzunluğu 1 m olan 30o ' lik eğik düzlemin
en üst noktasından,, kütlesi 3 kgg olan bir kutu durgun
g
halden aşağıya doğru kaymaya başlıyor. Kutuya
5 N' luk sabit bir sürtünme kuvveti etkimektedir.
a) Eğik düzlemin tabanında kutunun hızı ne olur?
b)) Kutunun ivmesi nedir?
1 2
a ) Ei K i U i = mgh = 3(9.8)(0.5) = 14.7 J ; Es K s U s = mv
2
E = f k d = 5(1) 5 J
1 2
2(9.7)
Es Ei mv 14.7 5 v
2.54 m / s
2
3
3(9.8)(0.5) 5
b) Fx mg sin(30) fk ma a
3.23 m / s2
3
(8-24)
Örnek : Kütlesi 20 kg olan bir çocuk, 2 m yüksekliğinde
düzgün olmayan bir kaydırağın tepesinden ilk hızsız
kaymaya başlıyor.
a) Sürtünme olmadığını varsayarak, kaydırağın en alt
noktasında
k
d çocuğun hızı
h nedir?
di
b) Sürtünme olması durumunda, çocuğun en alt noktadaki
hı ı 3 m/s old
hızı
olduğuna
ğ na göre sistemin mekanik enerjisindeki
kayıp ne kadardır?
1 2
a) Ki Ui = Ks Us mgh= mvs
2
vs = 2gh = 2 9.8 (2) = 6.26 m / s
1 2
1
2
b ) E = Es Ei mvs ' mgh = (20) 3 20(9.8)(2) 302 J
2
2
(8-25)
Örnek : Bir kayakçı 20 m yükseklikteki rampadan
ilk hızsız kaymaya başlıyor.
başlıyor Rampanın alt ucundan
sonra, düz olan bölgede kayakçı ile zemin arasında
sürtünme katsayısı 00.21
21' dir.
dir
a) Kayakçı, rampanın alt ucundan duruncaya kadar ne kadar yol alır?
b) Eğik düzlemin kendisi de aynı sürtünme kaysayısına sahip olsaydı,
olsaydı
(a) şıkkının cevabı ne olurdu?
1
a ) Ki U i = K s U s mgh = mvB2 vB 2 gh 19.8 m / s
2
vB2
1 2
E EC EB = 0 mvB = k mgd d
95.2 m
2
2k g
1 2
b ) mgh k mg cos L mvB vB 2 gh 1 k cot(20) 12.9 m / s
2
vB2
d
40.3 m
2k g
(8-26)
Örnek : İki blok hafif bir iple, sürtünmesiz ve ağırlıksız
bir makara üzerinden birbirine bağlıdır.
bağlıdır Yatayda bulunan
m1 kütleli blok, yay sabiti k olan bir yaya bağlıdır. Yay
uuzamasız
a as du
durumda
u da iken
e sistem
s ste seerbest
best bırakılıyor
b a yo ve m2
kütleli blok h kadar düşünce bir an için duruyor. m1 kütleli
blok ile zemin arasındaki sürtünme katsayısı
y nedir?
K 0
ve
E U g + U yay k m1 gh
U g U s U i 0 m2 gh
1 2
g
k m1 ggh kh m2 gh
1 2
2
U yay kh
2
1
m2 g 2 kh
k
m
g
1
(8-27)
Örnek : Bir blok, h yüksekliğindeki
sürtünmesiz bir rampadan ilk hızsız
kaymaya başlıyor ve karşıda bulunan
ve eğim
ği açısı olan
l bir
bi eğik
ğik düzlemi
dü l i
tırmanıyor. Blok ile eğik düzlemin
L
arasındaki kinetik sürtünme katsayısı
k olduğuna göre, blok bu düzlemde
ne kadar yükselir?
K 0 ; E U g k mg cos L
;
ymax
L=
sin
U g U s U i mgymax mgh
ymax
k mg cos
i
sin
h
mgymax mgh ymax
1 k cott
(8-28)
Örnek : Kütlesi 10 kg olan blok,
ilk hızsız olarak A noktasından
bırakılıyor. Uzunluğu 6 m olan
sürtünmeli
ü tü
li bir
bi bölgeyi
böl i ( BC arası))
geçtikten sonra, yay sabiti
k = 2250 N/m yaya
a a çarparak 30 cm sıkıştırıyor.
sıkıştırı or
BC arası bölgenin sürtünme katsayısını bulunuz.
K 0 ; E U g U yay k mgL
1 2
U g U s U i 0 mgh ; U yay kxm 0
2
1 2
mgh kxm
1 2
2
k mgL kxm mgh k
0.328
2
mgL
(8-29)
Örnek : Eğik düzlem üzerindeki m1 = 20 kg'lık
bl k hafif
blok,
h fif bir
bi iple,
i l m 2 = 30 kg'lık
k 'l k bbaşka
k bi
bir bloğa
bl ğ
bağlıdır. m 2 bloğu da, şekildeki gibi yay sabiti
250 N/
N/m olan
l bir
bi yaya bağlıdır.
b ğl d Bu
B haliyle
h li l yay
uzamasızdır ve eğik düzlem sürtünmesizdir. m1 bloğu eğik düzlemden
aşağı
ğ ddoğru
ğ 20 cm çekilip
kili (m 2 bloğu
bl ğ yerden
d 40 cm yüksekte)
ük kt ) ilk hızsız
h
bırakılıyor. Yay uzamasız hale geldiğinde blokların hızı ne olur?
E K U g U yay 0 (Tüm kuvvetler korunumlu olduğu için)
1
1 2
1
2
2
K m1v m2 v ; U g (m1 gL sin m2 gL) ; U yay kL
2
2
2
1
1 2
2
m1 m2 v (m1 sin m2 ) gL kL 0
2
2
kL2 2((m2 m1 sin ) g
gL
10 67.2
v
1 24 m/s
1.24
m1 m2
50
L 20 cm
L=20
k=250 N/m
m1=20 kg
m2=30 kg
(8-30)
BÖLÜM-9
M
I
Kütle Merkezi ve Çizgisel MomentumIR
Bu bölümde aşağıdaki konulara değinilecektir:
A
L
Y
LE
D
L
YI
Bir parçacık sisteminin kütle merkezi
Kütle merkezinin hızı ve ivmesi
Bir
Bi parçacığın
ğ ve parçacık
k sistemlerinin
i t l i i çizgisel
i i l momentumu
t
.
R
D
e
v
T
A
L
Kütle merkezinin nasıl hesaplanacağını ve çizgisel
O
P ilkesini öğreneceğiz.
momentumun korunumu
ğ
ğ
A
F
A
Son olarak, T
çizgisel momentumun korunum ilkesi yardımıyla
S
bi ve iki
bir
b
boyutta
çarpışma problemlerini
bl l i i çözeceğiz.
ö
ği
U
M
.
R
D
(9-1)
Kütle Merkezi :
x-ekseni
ekseni üzerinde
ü erinde x1 vee x2 noktalarında bulunan,
b l nan sırasıyla,
sırası la
M
I
m ve m kütlelerine sahip iki noktasal cismin kütleIR
merkezi,
D
L
m x m x
I
x
Y
m m
A
L
b ğ
bağıntısı
ile
il verilir.
ili
Y
E
L
.
x-ekseni üzerine yerleştirilmiş n tane parçacık durumunda
bu bağıntı:
R
D
m x m x m x ... m x
m x m
x m x ... m x
1
x
ve
mx
m m m ... m
M
M
T
A toplam kütlesidir.
olur. Burada M sistemdeki parçacıkların
L
O
P sistemi) parçacık sisteminin kütle
Üç-boyutlu
Üç
boyutlu uzayda (xyz -koordinat
koordinat
A
merkezi de, kütlesi A
mFolan parçacığın konum vektörü r olmak üzere,
T ola
daha genel bir ifade
olan
n
S
U
1. M
r
m r bağıntısına sahiptir.
R
DM
1
km
2
1 1
1
1 1
2 2
n n
3 3
km
1
2
3
i
2 2
2
1 1
2 2
3 3
n n
n
i 1
n
i i
i
n
kkm
m
i 1
i i
(9-2)
Konum vektörü rkm xkm ˆi y km ˆj z km kˆ biçiminde de yazılabileceğinden, kütle
merkezinin
k i i koo
k rdinatları
di l
1 n
xkm
m i xi
M i 1
ile verilebilir.
S
U
.M
y km
1
M
n
m y
i 1
i
i
z km
1
M
n
m z
i 1
i i
M
I
R
I
D
L
YI
A
L
Bir parçacık sisteminin kütle merkezi,
merkezi
sistemdeki tüm
Y
E
L
parçacıkların toplandığı bir nokta
ve sistem üzerine etki
.
Rkt etkiyormuş
eden
d tüm
tü dış
d kuvvetler
k
tl oDnoktaya
tki
gibi
ibi
e
düşünülebilir.
v
T
A şekildeki gibi havaya fırlatıldığını
Bir beyzbol sopasının
L
O
ve yyer-çekimi
çP
kuvvetinin etkisi altındaki hareketini düşünelim.
ş
A
Sopanın
kütle merkezi siyah bir nokta ile işaretlenmiştir.
F
A
T Kütle merkezinin hareketine bakıldığında,
ğ
, bunun bir
eğik atış hareketi olduğu kolayca görülür.
R
D
Ancak, kütle merkezi dışındaki noktaların hareketleri oldukça karmaşıktır.
(9-3)
Örnek : Konumları şşekilde verilen
m1 = m2 = 1.0 kg ve m3 = 2 kg kütleli
üç parçacıktan oluşan sistemin
kütle merkezini bulunuz.
M
I
R
A
L
Y
rE
) L
.
R
I
D
L
YI
km
D
m x m x m x m x (1)(1)ve(1)(2) (2)(0)
x
T
0.75
0 75 m
A
M
m m m L
11 2
O
P
m y m y mFyA m y (1)(0) (1)(0) (2)(2)
y
1 m
A
M
m m m
11 2
T
S
U
ˆ
r 0.75i
ˆj m
M
.
R
1
D
tan (
) 53.1
n
km
i i
i 1
1 1
2 2
1
3 3
2
3
2
3 3
n
km
i
i 1
i
1 1
2
1
2
3
km
1
o
0.75
(9-4)
ˆ
Örnek : xy -düzlemindeki konumları r1 12 j (cm), r2 12iˆ (cm) ve
r 12iˆ 12ˆj (cm) olan cisimlerin kütleleri de sırasıyla, m = 0.4 kg ve
3
1
M
I
R
I
D
L
YI
m2 = m3 = 0.8 kg ile veriliyor. Sistemin kütle merkezini bulunuz.
A
L
m x m x m x m x (0.4)(0) (0.8)(LE12)Y (0.8)(12)
0
x
.
M
m m m
0.4
0.8 0.8
R
D
e
v
m y m y m y m y AT
(0.4)(12) (0.8)(0) (0.8)( 12)
L
1.2 cm
y
O
m
11 2
M
m m P
A
F
A
r x ˆi y Tˆj 1.2ˆj cm
S
U
M
.
R
D
n
km
i 1
i i
1 1
2 2
1
3 3
2
3
2
3 3
n
km
i 1
i
i
1 1
2
1
km
km
2
3
km
(9-5)
Katı Cisimlerin Kütle Merkezi :
M
I
Maddenin, içinde homojen bir şekilde dağıldığı sistemlere katı cisimler diyebiliriz.
R
I
Böyle cisimlerin kütle merkezlerini bulmak için,
için kesikli toplama işlemiIyerine
LD
Y
sürekli toplama işlemi olan integrali kullanacağız:
A
L
Y
1
1
1
E
x
xdm
y
ydm L z
zdm
M
M
M
.
R
D
Cisimlerin simetrisi (simetri noktası, simetri ekseni,
simetri düzlemi) uygun ise integral
e
v
alma işlemine
ş
ggerek kalmayabilir.
y
Kütle merkezi
simetri elemanı üzerinde olacaktır.
T
A
L
O
P
Örneğin bir kürenin kütleAmerkezi, kürenin merkezidir.
C
F
A
T
S
U
Bir dikdörtgenin
kütle merkezi, karşılıklı köşegenleri
M
C
.
birleştiren doğruların kesişim noktasıdır.
R
D
km
km
km
(9-6)
Katı cisim L uzunluğuna ve M kütlesine sahip
M
I
R
bi çubuk
bir
b k ise,
i kü
kütle
l yoğunluğu
ğ l ğ çizgiseldir:
i i ldi
dm M
1
xkm
x dx
k
dl
L
M
I
D
L
YI
A
L
Y
Katı cisim
i i A yüzey alanına
l
ve M kkütlesine
l i sahip
hi
E
L
ince bir plaka ise, kütle yoğunluğu yüzeyseldir: .
R
D
dm M
1
1
x
x dA ;vye
y dA
M
M
dA A
T
A
L
O
Katı cisim V hacmine ve M kütlesine
P sahip ise,
A
kütle yoğunluğu hacimseldir:
F
A
T
S
U
dm M
1
1
1
M
x x dV ; y y dV ; z z dV
.
dV
V
M
M
M
R
D
M,A
dm
km
dA
km
M,V
dm
dV
km
km
km
(9-7)
Örnek :
a ) Kütlesi M ve uzunluğu L olan homojen bir çubuğun
kütle merkezini bulunuz.
b) Çubuğun
Ç b
çizgisel
i i l kütle
k l yoğunluğu
l
= x iise, kütle
k l
merkezini bulunuz. (x çubuğun sol ucundan olan
uzaklık, da bir sabittir).
a ) xkm
1
M
1
xdm M
b ) xkm
1
M
1
xdm M
L
L
L
A
L
Y
LE
e
v
T
L
2
L
D
A
L
1
xPdxO M x x dx 3M x
A
AF
L
T
S
U
0
I
D
L
YI
2
L
M L
2
0 x dx 2 M x 0 2 M 2 M L 2
L
L
3
0
M dx x dx
0
.
R
M
I
R
0
L
x
0
2
2
2
L
0
L3
3M
2
M
.
L
L 2M 2
xR
L
3
M
3
M
L
3
D
3
km
3
2
(9-8)
Örnek : Kütlesi M ve boyutları şekilde verilen dik üçgen
bi i i d ki plakanın
biçimindeki
l k
k l merkezini
kütle
k i i bulunuz.
b l
M
2M
y b
dm
d
( ydx
d )
( ydx
d ) ve
ab
x a
1
ab
2
xkm
dm
ykm
1
M
a
a
.
R
I
D
L
YI
2
2
2 x
b
x
x
dx
xydx
a
2
ab
b0
ab
b 0 a
a 3 0 3
3
D
e
v
b y
T
M
2M
b
(a x)dy
(a x)dy ve
ab
ax a
1
ab
2
1
M
A
F
A
L
O
P
A
T
b
b
2
2
a
ydm abb 0 y(a x)dy abb 0 y b (b y)dy
S
U
y
.2 M
b
y 1
b
b
2
b 2
3 0 3
R
D
ykm
xdm
a
A
L
Y
E
L
2
M
I
R
2
3
(9-9)
Parçacık Sistemlerinde Newton'un İkinci Yasası :
Kütleleri m1 , m2 , m3, ..., mn ve konum vektörleri r1 , r2 , r3 ,..., rn
M
I
R
olan n parçacıklı bir sistem düşünelim. Kütle merkezinin
konum vektörü şu ifadeyle verilir:
m1r1 m2 r2 m3r3 ... mn rn
rkm
M
Her iki tarafın zamana göre türevi alınırsa,
.
R
A
L
Y
LE
I
D
L
YI
d
1
d
d
d
d
rkm
m1 r1 m2 r2 m3 r3 ... mn rn
dt
M dt
dt
dt
dt
Mvkm m1v1 m2 v2 m3 v3 ... mn vn
bulunur. Burada vkm kütle merkezinin hızı, vi ' de i. parçacığın hızıdır.
D
e
v
T
A
L
O
P
H iki tarafın
Her
t f bir
bi kez
k ddaha
h zamana göre
ö türevi
tü i alınırsa,
l
A
F
A
1 dT
d
d
d
d
v mS v m
v m
v ... m
v
dt
M U dt
dt
dt
dt
M
Ma .m a m a m a ... m a
R
D
bulunur. Burada a kütle merkezinin ivmesi, a ' de i. parçacığın ivmesidir.
km
km
1
1 1
1
2 2
km
2
3 3
2
3
n
3
n
n n
i
(9-10)
i. parçacığa etkiyen kuvvet Fi ' dir ve Newton'un ikinci yasası
gereği,
i
mi ai Fi Makm F1 F2 F3 ... Fn
yazılabilir.
A
L
Y
LE
M
I
R
I
D
L
YI
dış i ç
Fi kuvveti
k
i ddış ve iç
i olmak
l k üzere
ü
iki bileşene
bil
ayrılabilir:
l bili Fi Fi Fi
.
R
Bu durumda yukarıdaki eşitlik şöyle bir forma dönüşür:
dış i ç
dış i ç
dış i ç
dış i ç
Makm F1 F1 F2 F2 F3 F3 ... Fn Fn
ddışş ddışş ddışş
ddışş
iç iç iç
iç
M km F1 F2 F3 ... Fn F1 F2 F3 ... Fn
Ma
ve D
T
A
L
Eşitliğin sağındaki ilk parantez, sistem üzerine etki eden net kuvvettir (Fnet ).
A
F
O
P
İkinci parantez ise, Newton'un üçüncü yasası gereği sıfırdır. Bu durumda,
kütle merkezinin hareket denklemi Makm Fnet ' dir ve bileşenler cinsinden
S
U
Fnet, x Makm, x
A
T
Fnet, y Makm, y
M
.
bağıntıları
ğ R ile verilir.
D
Fnet, z Makm, z
(9-11)
Yandaki eşitlikler, bir parçacık sisteminin kütle
merkezinin, sistemdeki tüm parçacıkların toplandığı
ve tüm dış kuvvetlerin etkidiği bir noktasal kütle
gibi hareket edeceğini göstermektedir.
Şekildeki örneği ele alalım.
Yerden ateşlenen bir roket yerçekimi kuvvetinin
etkisi altında p
parabolik bir yol
y izler.
.
R
Makm Fnet
M
I
F Ma
R
I
D
L
F I Ma
M
Y
AF Ma
L
Y
LE
net, x
km, x
net, y
km, y
et, z
net,
km,, z
D
e
v
T
Belli bir anda roket patlar ve birçok parçaya ayrılır.
Patlama olmasaydı, roketin izleyeceği yol kesikli
çizgiyle gösterilen yörünge olacaktı.
Patlamada ortaya çıkan kuvvetler iç kuvvetler
olduğundan vektörel toplamı sıfır olacaktır.
A
F
A
L
O
P
A
T
Roket üzerinde etkin olan kuvvet hala yerçekimi kuvvetidir.
S
U
Bunun anlamı, patlamada ortaya çıkan parçalar da yerçekimi
kuvveti etkisiyle parabolik bir yörüngede hareket ederler.
M
.
R
Dolayısıyla
D l
l kütle
tl merkezinin
k i i yörüngesi,
öü
i patlamadan
tl
d önceki
ö ki
yörüngesiyle aynı olacaktır.
D
(9-12)
Çizgisel Momentum :
p mv
Kütlesi m ve hızı v olan bir cismin çizgisel momentumu
p mv
il tanımlanır.
ile
t
l
SI sistemindeki
i t i d ki bi
birimi
i i kg.m/s'
k
/ ' dir.
di
M
I
R
A
L
Y
LE
I
D
L
YI
Momentum ifadesinin her iki tarafının zamana göre türevi alınırsa,
dp d
dv
mv m
ma Fnet
p mv
dt dt
dt
dp
Fnet
bulunur.
dt
.
R
D
e
v
T
A
L
Bu ifade Newton' un ikinci yasasının
bir başka ifade şeklidir.
O
P
Sözlü olarak: "Bir cisminAçizgisel momentumunun değişim hızı, o cisme etkiyen
F
A
net kuvvetin büyüklüğüne
eşittir ve onunla (net kuvvetle) aynı yöndedir.
T
S
Bu eşitlik, U
bir cismin çizgisel momentumunun ancak bir dış kuvvetle
M
.
değişebileceğini
göstermektedir. Dış kuvvet sıfır ise, cismin çizgisel
R
D
momentumu değişmez.
(9-13)
Parçacık Sistemlerinin Çizgisel Momentumu:
i. parçacığın kütlesi mi , hızı vi ve çizgisel momentumuIM
R
I
pi oolsun.
su . n tane
ta e parçacıktan
pa çac ta oluşan
o uşa bir
b sistemin
s ste LD
çizgisel
ç g se
YI
momentumu şu şekilde verilir:
A
L
Y
P p p p ... p m v m v m v ... LmEv Mv
.
R
Bir parçacık sisteminin çizgisel momentumu,
momentumu
sistemdeki parçacıkların
D
e
toplam kütlesi (M ) ile kütle merkezinin
hızının (v ) çarpımına eşittir.
v
T
A
Her iki tarafın zamana göre türeviLalınırsa,
O
P
dP d
Mv
F
M M
Ma A
dt dt
F
A
bulunur. Bu eşitlik,
parçacık sisteminin çizgisel momentumunun ancak bir dış
T
S
U
kuvvetle değişecebileceğini
göstermektedir.
M
.
R
Dış
Dkuvvet sıfır ise, parçacık sisteminin çizgisel momentumu değişmez.
1
2
n
3
1 1
2 2
n n
3 3
km
km
km
km
net
(9-14)
ˆ m/s ve kütlesi 3 kg olan bir cismin
Örnek : Kütlesi 2 kg olan bir cismin hızı (2iˆ 3j)
ˆ m/s' dir. İki parçacıktan oluşan bu sistemin kütle merkezinin hızını ve
hızı da (iˆ + 6j)
M
I
R
momentumunu bulunuz.
N
vkm
m
v
ii
A
L
Y
LE
ˆ + 3(iˆ + 6j)
ˆ
2(2iˆ 3j)
1.4i
1 4iˆ 2.4
2 4ˆj m/s
23
i 1
M
.
R
I
D
L
YI
Pkm Mvkm 5 11.4i
4iˆ 22.4
4ˆj 7iˆ 12ˆj kg m/s
D
e
v
Örnek : Yerden y
yukarı doğru
ğ ateşlenen
ş
birTroket 1000 m y
yükseklikte 300 m/s hıza sahipken
p
A
L
patlayarak üç eşit parçaya bölünüyor. Birinci parça 450 m/s hızla aynı yönde, ikincisi
O
P parçanın hızı nedir?
240 m/s hızla doğuya gidiyor.
gidiyor Üçüncü
A
F
A
M
T
mS
m m
3
U
M
Mv
m
v
m
v
m
v
v
v
v v
3
.
R
v 900 450 Kˆ 240 Dˆ 450 Kˆ 240 Dˆ m/s
D
1
2
i
3
1 1
2 2
3 3
3
i
1
2
3
(9-15)
Çarpışma ve İtme :
Bir cisme sıfırdan farklı bir dışş kuvvet etkidiğinde
ğ
cismin çizgisel
ç g
momentumunun değişebileceğini öğrendik.
M
I
R
I
İki cismin ççarpışması
pş
sürecinde böyle
y kuvvetler ortaya
y ççıkar.
D
L
Bu kuvvetlerin şiddetleri çok büyük ancak, etkime süreleri çok kısadır.
YI
A
Çarpışan cisimlerin çizgisel momentumlarındaki değişimin kaynağıdırlar.
L
Y
E
L
İki cisim arasındaki çarpışmayı. düşünelim. Çarpışma,
R
cisimlerin temas ettiği t D
anında başlar ve temasın kesildiği
e
t anında biter. Cisimler
çarpışma süresince birbirlerine F (t )
v
T bi kuvvet
il verilen
ile
il değişken
d A
i k bir
k
uygularlar.
l l Bu kkuvvetin
i
L
değişimiO
Şekil-a' da verilmiştir.
P
A
F
dp
A
F (t )
ile verilir. Burada p, cisimlerden birisinin çizgisel
T
dt
S
momentumudur.
U
M
.
dp F (t )dt dp F (t )dt
R
D
i
s
ts
ts
ti
ti
(9-16)
ts
dp
p
p
p
momentumdaki değişim
s
i
M
I
R
ti
ts
I
D
L
I
Y
İtme, çarpışan bir cismin çizgisel momentumundaki değişime eşittir:
J
p
A
L
Y
Genellikle, çarpışma süresince cisimler arasındaki etkileşmeEkuvvetinin
zamanla
L
nasıl değiştiğini bilemeyiz. Ancak, itmenin büyüklüğü .kuvvet-zaman grafiğinde
R
eğri altında kalan alana eşittir.
D
e
v
Aynı alanı verecek şekilde ortalama bir
kuvvet (F ) bulursak,
T
A
cisimlerin birbirlerine uyguladığıLitmeyi,
O
J F t F (t t )
P
A
şeklinde yazabiliriz. F
A
T
S
G
Geometrik
t ik olarak,
l k F (t )) t grafiği
fiği altında
lt d kalan
k l alan
l
U
ile F -tM
grafiği altında kalan alan aynıdır (Şekil-b)
.
R
D
J F (t )dt " itme" veya "impuls" olarak tanımlanır.
ti
ort
ort
ort
s
i
ort
(9-17)
Seri Çarpışmalar :
Kütlesi m ve +x-yönünde
y
hızı v olan özdeşş pparçacıkların
ç
sürekli
bir şekilde sabitlenmiş bir hedefe çarptığını düşünelim.
M
I
R
I
D
t süresince n tane parçacığın hedefe çarptığını varsayalım
varsayalım. HerbirIL
parçacığın
Y
momentumundaki değişim p olacaktır. Herbir çarpışmada A
p kadarlık bir
L
Y
momentum hedefe
h d f aktarılacaktır.
k l k
E
L
t süresince hedef üzerindeki itme ((impuls)
p ) JR
.np olduğundan,
ğ
D
J np
n
e v, çarpışma nedeniyle
F
mv olur. Burada
v
t
t
t
T
A miktarıdır. Dolayısıyla,
L
herbir parçacığın hızındaki değişim
O
P
m
F
v
A
F
t
A
T m
S
yazılabilir.
l bili Buradaki
BU d ki
, parçacıkların
kl
hedefe
h d f çarpma hızıdır.
h d
t
M
.
Çarpışmadan
sonra parçacıklar duruyorsa
duruyorsa, v 0 v v olur
olur.
R
D
Çarpışmadan sonra parçacıklar tam olarak yansıyorsa, v v v 2v olur.
ort
ort
(9-18)
Örnek : Kütlesi 400 g olan bir top 30 m/s hızla,
şekildeki gibi bir duvara doğru fırlatılıyor. Top
duvara çarptıktan sonra geliş doğrultusunun tersi
yönünde 20 m/s hıza sahiptir.
a) Duvarın topa
p uyguladığ
yg
ğı itme nedir?
M
I
R
I
D
L
YI
A
L
Y
Euyguladığı
b) Topun duvarla temas süresi 10 ms ise, duvarın topa
L
.
ortalama kuvvet nedir?
R
D
e
v
T
ˆ
20iˆ kg m/s
a) J P mv mv 0.4 20iˆ (30i)
A
L
O
P
J
20iˆ
A
b ) J F t F F
2000iˆ N
A
t 0.01
T
S
U
M
.
R
D
s
ort
i
ort
(9-19)
Örnek : Kütlesi 400 g olan bir top 20 m/s hızla yatay
doğrultuda sola doğru geliyor. Oyuncu topa geliş
I
D
L
YI
doğrultusunun tersi yönünde yatayla 45o ' lik bir
açıyla vuruyor ve topa 30 m/s' lik bir hız kazandırıyor. Top ile oyuncu
ğ
ggöre,,
arasındaki temas süresi 10 ms olduğuna
A
L
Y
LE
M
I
R
a ) Oyuncunun topa uyguladığı itme nedir?
b )) Oyuncunun topa uyguladığı ortalama kuvvet nedir?
.
R
D
e
v
ˆ + 30sin45jˆj ( 20i)
ˆ)
a ) J P mv mv 0.4 30
cos
45i
T
A
L
ˆ
ˆ
O
J 16.5i + 8.5j kgP
m/s
A
F
ˆ + 8.5jˆ
A
16.5i
J
b) J F t ST
F
1650iˆ + 850jˆj N
t
0.01
U
M
850
.
F
1650 850 =1856
1856 N ; tan
27.25
R
=27.25
1650
D
s
ort
ort
2
ortt
i
2
1
o
(9-20)
Çizgisel Momentumun Korunumu :
M
Bir parçacık sistemi üzerine etkiyen net kuvvet
I
R
I
D
dP
L
Fnet 0
Fnet 0 P sabit
biI
Y
dt
A
L
Y
E
Bir parçacık sistemi üzerine dış kuvvet etkimiyorsa,
L
.
R
toplam çizgisel momentum P değişmez.
değişmez
D
e
bir t anındaki
Herhangi bir t anındaki vHerhangi
çizgisel momentum AT
= çizgisel momentum
L
O
P
A
Çizgisel momentumunFkorunumu önemli bir ilkedir ve çarpışma problemlerinin
A
Tkolaylık sağlar.
çözümünde büyük
sağlar
S
U
M üzerine etkiyen dış kuvvet F 0 ise, iç kuvvetler ne kadar
Not : Bir sistem
.
R
bü ük
büyük
l
olsun,
l
çizgisel
i i l momentum
t
her
h zaman korunur.
k
D olursa
i
s
net
(9-21)
Örnek : Bir nişancı 3 kg' lık bir tüfeği geri tepmesine
izin verecek şekilde tutuyor.
tutuyor Yatay doğrultuda
M
I
R
nişan alarak 5 g' lık mermiyi 300 m/s hızla eteşliyor.
I
D
L
a) Tüfeğin
f i gerii tepme hızını,
h
YI
A
b) Merminin ve tüfeğin momentumunu,
L
Y
c) Merminin ve tüfeğin kinetik enerjisini bulunuz.LE
.
mv DR 0.005
0 005
ˆ
ˆ
a ) P mv MVR 0 VR e
300i = 0.5i m/s
M
v
3
T
A
b ) Pm mv (0.005)300iˆ L1.5iˆ kg m/s
O
P
PR MVR (3) A
0.5i
0 5iˆ 1.5i
1 5iˆ kg
k m/s
/
F
A
1 S2 T 1
c ) K m U
mv = (0
(0.005)(300)
00 )(300) 2 =226
226 J
2
2
M
.
R
1
1
2
DK R mVR = (3)(0.5)2 =0.375 J
2
2
(9-22)
Çarpışmalarda Momentum ve Kinetik Enerji :
Kütleleri m1 vee m2 , ilk hızları
hı ları v1i vee v2i ,
çarpışmadan sonraki hızları da v1s ve v2s
M
I
R
olan
l iki cisim
i i düşünelim.
dü ü li
Sistem izole ve Fnet 0 ise, çizgisel momentum korunur.
Bu kural, çarpışmanın türüne bakılmaksızın doğrudur.
Çarpışmaları
Ça
p ş a a iki sınıfta
s ta top
toplamak
a a mümkündür.
ü ü dü .
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
"Esnek (elastik)" ve "Esnek olmayan" olmayan çarpışmalar.
Kinetik enerjide bir kayıp yoksa (K i K s ),
) çarpışma esn
esnek
ek çarpışmadır.
çarpışmadır
A
L
Kinetik enerjide bir kayıp varsaO
(K K ), çarpışma esnek olmayan çarpışmadır.
P dönüşmüştür deriz.
Bu kayıp başka bir enerji formuna
formuna
deriz
A
F
A
İki cisim çarpıştıktan
sonra birbirine yapışıp birlikte hareket ediyorsa,
T
S
cisimler "tamamen
esnek olmayan" veya "esnek olmayan tam çarpışma"
U
Mderiz. Bu tür çarpışmalar esnek olmayan çarpışma türüdür ve
yapmıştır
.
R
kinetik
D enerjideki kaybın en fazla olduğu çarpışma türüdür.
s
i
(9-23)
Bir - Boyutta Esnek Olmayan Çarpışma :
Bu tür çarpışmalarda, çarpışan cisimlerin
çizgisel momentumları korunur:
p1i p2i p1s p2 s m1v1i m2v2i m1v1s m2v2 s
M
I
R
I
D
L
YI
A
L
Bir - Boyutta Tamamen Esnek Olmayan
Çarpışma :
Y
E yapışır ve çarpışmadan
Bu tür çarpışmalarda, çarpışan cisimler
L
.
sonra birlikte hareket ederler.
ederler R
Soldaki resimde,
resimde
D
v 0 özel durumu için:
e
v
m
T
m v m V mA
V V
v
m m
L
bulunur.PO
A
Ftür çarpışmalarda kütle merkezinin hızı
Bu
A
T
2i
1 1i
1
1
2
1
S
U
D
M
.
R
vkm
1i
2
p1i p2i
m1v1i
P
m1 m2 m1 m2 m1 m2
il verilir.
ile
ili
(9-24)
Örnek : Kütleleri 0.5 kg ve 0.3 kg olan iki blok şekildeki gibi birbirine doğru
2 m/s'
m/s lik hızlarla hareket ediyorlar
ediyorlar. Çarpışmadan sonra iki blok birleşip birlikte
hareket ettiklerine göre, çarpışmadan sonra blokların ortak hızı nedir?
Sistemin çarpışmadan önceki ve sonraki kinetik enerjisini kıyaslayınız.
kıyaslayınız
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
m A v A1 mB vB1 m A mB v AB 2
A
L
O
ˆ
ˆ
(0.5) P
2i (0.3)( 2i)
FA
0.5iˆ m/s
0.5 0.3
A
T
v AB 2
S
U 1
1
1
2
2
K1 m v mB vB1 1.6 J ;
K 2 m A mB v AB
2 0.1 J
2
2
2
K K 2 K1 1.5
1 5 J' lük enerji kaybı vardır
vardır.
D
M
.
R
2
A A1
(9-25)
Örnek : Kütlesi m olan bir mermi, kütlesi M olan tahta
bloğa doğru ateşleniyor ve tamamen esnek olmayan çarpışma
yapıyorlar. Blok+mermi sistemi maksimum y yüksekliğine
çıkıyor. Merminin geliş hızını, bilinenler cinsinden bulunuz.
mv
mv m M V V
mM
.
R
1
D
m M V 2 m M gy V 2 e2 gy
2
v
A
L
Y
LE
M
I
R
I
D
L
YI
T
A
A
F
S
U
M
.
R
A
T
L
O
P
2
m 2
mM
v 2 gy v
2 gy
mM
m
D
(9-26)
Örnek : Bir tüfekten ateşlenen 8 g kütleli mermi yatay, sürtünmesiz bir
yüzeyde
ü d bbulunan
l
ve bi
bir yaya bbağlanmış
ğl
0.992
0 992 kg
k kütleli
kütl li ttahta
ht bl
bloğa
ğ
saplanıyor. Blok+mermi yayı 15.0 cm sıkıştırıyor. Yayı 0.25 cm uzatmak
M
I
R
I
D
L
için gerekli kuvvet 0.75 N olduğuna göre, çarpışmadan hemen sonra I
Y
blok+mermi sisteminin hızı nedir?
A
L
Y
E
L
Merminin çarpışmadan önceki hızı nedir?
.
R
D
e
0.75
v
k
300 N /m
T
0 25 10
0.25
A
L
mv
O
m v m M V VP
Blok+merminin çarpışmadan sonraki hızı
mM
A
F1
1
k
A
x 2.6 m /s
m M VST kx V
2
2
mM
U
M
.
mM
R
V 325 m/s
/
MD i i çarpmadan
Merminin
d öönceki
ki hhızı: v
2
2
2
m
(9-27)
Bir - Boyutta Esnek Çarpışma :
Kütleleri m1 ve m2 , ilk hızları v1i ve v2 i ,
çarpışmadan sonraki hızları da v1s ve v2 s
M
I
R
I
D
L
YI
olan
l iki cisim
i i düşünelim.
dü ü li
A
L
Bu tür çarpışmalarda hem çizgisel momentum,
momentum hem deY
kinetik enerji korunur.
korunur
E
L
R.
Çi i l momentumun
Çizgisel
t
korunumu:
k
m v mD
v mv m v
(E 1)
(Eş-1)
e
v
1
1
1
1
Kinetik enerjinin korunumu
: Tm v m v m v m v (Eş-2)
A2
2
2
2
L
O
İki bilinmeyenli (v ve v P
) bu iki denklem çözülürse, cisimlerin çarpışmadan
A
sonraki hızları için şu
ifadeler
elde edilir:
F
A
m m T 2m
v
vS
v
U
m m
m m
M
R. 2m m m
vD
v
v
m m
m m
1 1i
2
1 1i
1s
1s
1
2
1
2
1
2s
1
2
1 1s
2
2 2i
2 2s
2
1 1s
2
2 2s
2s
2
1i
1
1i
2 2i
2i
2
2
1
1
2
2i
(9-28)
Esnek Çarpışmada Özel Durum v = 0 :
2i M
I
Az önce elde edilen eşitliklerde v2i 0 yazarsak,
R
I
D
L
v1s ve v2 s :
I
m m2
2m2
m m2
v1s 1
v1i
v2i v1s 1
v1i
m1 m2
m1 m2
m1 m2
v2 s
.
R
2m1 m2 m1
2m1
v1i
v2i v2 s
v1i
m1 m2
m1 m2
m1 m2
A
L
Y
LE
Y
D
e
v
bulunur. Aşağıdaki
ğ
özel durumlara göz
g T atalım:
A
L
1. m m m
O
P
m m
m mA
v
v F v 0
A
m
m m
m
T
2m US 2m
v
v
v v
M
m. m
mm
R
D cisimler hızlarını değiştirirler.
Çarpışan
1
1s
2
1
2
1
2
1
2s
1
1i
1i
1i
1i
1i
2
(9-29)
m1
2. m2 m1
1
m2
I
D
L
YI
m1
1
m1 m2
m2
v1s
v1i
v1i v1i
m1
m1 m2
1
m2
.
R
A
L
Y
LE
M
I
R
m1
2
m
m1
2 m1
2
v2 s
v1i
v1i 2
v1i
m1
m1 m2
m2
1
m2
A
F
A
T
A
L
O
P
D
e
v
T
m1 cismi (küçük cisim) aynı hızla geliş yönünün tersi yönünde hareket eder.
S
U
m2 cismi (büyük cisim) ileri yönde çok küçük bir hızla hareket eder (
M
.
R
m1
1).
m2
D
(9-30)
m2
3 . m1 m 2
1
m1
v1 s
M
I
R
I
D
L
YI
m2
1
m1 m 2
m1
v1 i
v1 i v1 i
m
m1 m 2
1 2
m1
v2 s
.
R
A
L
Y
LE
2 m1
2
v1 i
v1 i 2 v1 i
m2
m1 m 2
1
m1
D
e
v
T
A
L
O
P
m cismi
i i (büyük
(bü ük cisim)
i i ) neredeyse
d
aynı hızla
h l yoluna
l devam
d
eder.
d
A
F
A
m cismi (küçük cisim) gelen cismin yaklaşık iki katı bir hızla hareket eder.
T
S
U
M
.
R
D
1
2
(9-31)
Örnek : Kütleleri 0.50 kg ve 0.30 kg olan A ve B blokları birbirine
doğru 2.0
2 0 m/s hızlarla yaklaşıp çarpışıyorlar
çarpışıyorlar. Çarpışmadan sonra
M
I
R
I
D
L
YI
B bloğu aynı hızla ters yönde giderken A bloğunun hızı ne olur?
Ç
Çarpışmanın
türü
ü ü ne olabilir?
l bili ?
.
R
A
L
Y
LE
ˆ) 0.50v 0.30(2.0i)
m A v Ai mB vBi m A v As mB vBs 0.50(2.0i)
( ˆ) 0.30(( 2.0i)
( ˆ)
As
0.20iˆ
v As
0.40iˆ m/s
0 50
0.50
D
e
v
T
Ki
Ks
A
L
1
1
1PO
1
m v m v (0.50)(2.0) (0.30)( 2.0) 1.6 J
A
2
2
2
2
F
1
1TA
1
1
m v S m v (0.50)(
(0 50)( 00.40)
40) (0
(0.30)(2.0)
30)(2 0) 00.64
64 J
U
2
2
2
2
M
.
R
Ki ik enerji
ji korunmuyor
k
"esnek
k olmayan
l
çarpışma"
D Kinetik
2
A Ai
2
B Bi
2
A As
2
B Bs
2
2
2
2
(9-32)
İki - Boyutta Çarpışma :
Kü l l i m1 and
Kütleleri
d m 2 olan
l iki cismin
i i xy -düzleminde
dü l i d
M
I
R
I
ILD
Sistemin çizgisel momentumu korunur: p Y
p p p
AK K K K
Çarpışma
Ç
p ş esnek ise kinetik enerji
j de korunur:
L
Y
E
Çarpışmadan önce m parçacığının durgun olduğunu,
çarpışmadan
sonra da
L
.
m cisminin geliş doğrultusuyla , m cismininR
de açısı yaptığını varsayalım
varsayalım.
D
e korunum ifadeleri:
Bu durumda, momentumun ve kinetik enerjinin
v
T
x ekseni: m v m v cos A
m v cos (Eş-1)
L
O
y ekseni: 0 m v sin
P m v sin (Eş-2)
A
1
1
1
(Eş-3)
mv mv A
Fm v
2
2 T 2
S
olur.
U
M
.
Yedi R
bilinmeyenli (m , m , v , v , v , , ) üç tane denklemimiz var
var. Bunlardan
D
herhangi dört tanesinin verilmesi halinde, diğer üçü kolaylıkla bulunabilir.
çarpıştıklarını gözönüne alalım.
1i
2i
1i
1s
2i
2s
1s
2s
2
1
1
1 1i
1 1s
2
1 2s
2
2 2s
1
1 1s
2
1 1i
2
2 2s
1
2
2
2
2 2s
1
2
1i
1s
2s
1
2
(9-33)
Örnek : Kütlesi 20 kg bir oyuncak robot (A) +x yönünde
2 m/s hızla giderken, yolu üzerinde durgun halde bulunan
M
I
R
ve kütlesi 12 kg olan başka bir robota (B ) şekildeki gibi
çarpıyor Çarpışmadan sonra A robotu geliş doğrultusu ile
çarpıyor.
30o açı yapacak şekilde yukarı yönde 1 m/s hızla hareket
ediyorsa B robotunun hızı ne olur?
ediyorsa,
A
L
Y
LE
I
D
L
YI
.
MomentumunR
korunumu
D
e
v
P P
20(2i)
( ˆ) ((20 cos 30)i
)ˆ T
(12
( v cos ))iˆ v cos 1.89
A
L
Oˆj (12v sin )jˆ v sin 0.833
30)
P P
0 (20sinP
A
F
A
T
S
0 833
0.833
00.833
833
U
tan (
) 23.8 v
2.06 m/s
M
1.89
sin
.
R
D
m A v Ai m B v Bi m A v As m B v Bs
xi
yi
xs
B
ys
B
1
o
B
B
B
(9-34)
Örnek : Kütlesi 0.5 kg olan bir bilye (A) +x yönünde 4 m/s hızla
giderken yolu üzerinde durgun halde bulunan ve kütlesi 00.3
giderken,
3 olan
başka bir bilyeye (B ) esnek olarak çarpıyor. Çarpışmadan sonra
A bilyesi geliş doğrultusu ile bilinmeyen bir açısı yapacak
şekilde 2 m/s hızla hareket etmektedir. B bilyesinin hızını, ve
açılarını hesaplayınız
hesaplayınız.
A
L
Y
LE
M
I
R
I
D
L
YI
1
1
1
1
.
2
2
2
2
mAvAi mBvBi mAvAs
R
A mBvBs
B
Kinetik
enerjinin
korunumu
D
2
2
2
2
e
v
mA 2
0.5
2
vBs
(vAi vAs )
(16 4)AT
4 47 m/s
4.47
mB
0.3
L
O
P
Momentumun korunumu
m v m v m v m
v
A
F
A
ˆ
ˆ 0.3(4.47 cos )iˆ cos 1.341cos 2
0.5(2
cos
)i
P P
0.5(4i)
T
S
P P
U 0 0.5(2sin )ˆj 0.3( 4.47 sin )jˆ
sin 1.341sin 0
M
.
36.8
36
8 ve 26.5
26 5
R
D
A Ai
B Bi
xi
xs
yi
ys
o
A As
B Bs
o
(9-35)
BÖLÜM-10
Dönme
Bu bölümde,
bölümde katı cisimlerin bir eksen etrafındaki dönü hareketi
incelenecektir. Bu konu kapsamında aşağıdaki konulara değinilecektir:
Açısall yer-değiştirme
A
d ği ti
Ortalama ve anlık açısal hız (ω)
ç
ivme ((α))
Ortalama ve anlık açısal
Dönme eylemsizlik momenti (I)
Tork (τ)
Ayrıca,
dönen katı cisimlerin kinetik enerjisi,
j ,
dönen cisimler için Newton’ un ikinci yasası
dönme hareketi için iş-kinetik
iş kinetik enerji teoremi
üzerinde de durulacaktır.
(10-1)
Dönmedeki Değişkenler:
Katı
K
t cisim,
i i üzerindeki
ü i d ki tüm
tü noktaların
kt l
bi bi l i göre
birbirlerine
ö
hareket etmediği cisimlerdir.
Bir eksen
Bi
k
etrafında
t f d dönen
dö
k t bir
katı
bi cismi
i i tek
t k bir
bi
değişkenle tarif edebiliriz.
Dönme ekseninin
k i i z-ekseni
k i olduğu
ld
soldaki
ld ki katı
k cismi
i i
göz önüne alalım. Cisim içinde ve dönme eksenine dik
bir referans çizgisi seçelim. Katı cismin üstten görünüşü
hemen alttaki resimde verilmiştir.
Herhangi bir t anında referans çizgisinin açısal konumu, t = 0 anındaki
açısal konumuyla θ kadar bir açı yapıyor olsun. Katı cisim üzerindeki
noktalar birbirlerine göre hareketsiz olduklarından,
olduklarından θ referans çizgisi
üzerindeki tüm noktaların açısal konumudur ve dönme ekseninden r kadar
uzaktaki bir noktanın çizdiği yay uzunluğu s’ ye şu şekilde bağlıdır:
s
r
Not: θ radyan cinsindendir.
(10-2)
Açısal Yer -değiştirme:
Soldaki resimde t1 ve t2 anlarındaki referans çizgileri
gösterilmiştir. Bu zaman aralığında katı cismin yaptığı
açısal yer-değiştirme 2 1 kadardır.
Açısal Hız :
t1 , t2
zaman aralığında ortalama açısal hız: ort
2 1
t2 t1
t
ile tanımlanır ve SI sistemindeki birimi rad/s' dir.
Anlık açı
ç sal hız ise,, ortalama açısal
ç
hızın t 0 durumundaki limitidir:
d
lim
t 0 t
dt
(10-3)
Açısal İvme:
Dönen katı cismin açısal hızında bir değişim oluyorsa,
bu değişimin ne kadar hızlı olduğu açısal ivme ile
açıklanabilir.
Üstteki resimde referans çizgisinin t1 ve t2 anlarındaki durumları verilmiştir.
Katı cismin t1 anındaki açısal hızı 1 ve t2 anındaki açısal hızı da 2' dir.
t1, t2
2 1
zaman aralığında ortalama açısal ivme: ort
t2 t1
t
ile tanımlanır ve SI sistemindeki birimi rad/s2 ' dir.
Anlık açısal ivme, ortalama açısal ivmenin t 0 durumundaki limitidir:
d
lim
t 0 t
dt
(10-4)
Açısal Hız Vektörü :
Açısal hız vektörü, katı cisim saat ibrelerinin
tersi yyönünde dönüyorsa
y
pozitif, saat ibreleri
p
yönünde dönüyorsa negatif alınır.
Açısal hız vektörü dönme ekseni doğrultusundadır ve kesin yönü
"sağ
sağ-el-ku
el kuralı" na göre belirlenir.
S ğ - ell - k
Sağ
kuralı
l : Dönme eksenini,
k i i parmakk uçlarınız
l
d
dönme
yönünü
gösterecek şekilde sağ avcunuza alın ve dönme yönünde bir tur
atın. Başparmağınızın yönü açısal hız vektörünün ( ) yönünü verir.
(10-5)
Örnek : Bir döner kapının açısal konumu (t ) = 5+10t + 2t 2 rad ifadesi ile veriliyor.
t = 0 ve t = 3 s anlarında
anlarında, kapının açısal hızını ve açısal ivmesini bulunuz.
bulunuz
d
(t )
10 4t (0) 10 rad/s ve (3) 22 rad/s
dt
d
(t )
4 ((0)) ((3)) 4 rad/s 2
d
dt
Örnek : Bir mil 65 rad/s hızla dönerken, t 0 anında (t ) 10 5t (rad/s 2 ) ile
verilen
il ivmeli
i
li bir
bi harekete
h k başlıyor.
b l
d ki açısall hızını
h
ve bu
b 3 s'' lik
t 3 s anındaki
süredeki açısal yerdeğiştirmesini bulunuz.
d
(t )
d dt (t ) 65 10t 2.5t 2 (3) 12.5 rad/s
dt
0
0
(t )
3
3
d
5
d dt (65 10t 2.5t 2 ) 65t 5t 2 t 3
dt
6 0
0
0
0
3
3
117.5 rad
(10-6)
Örnek : Kütlesi 6 kg olan bir blok sürtünmesiz eğik bir düzlem
üzerindeki A noktasından serbest bırakılıyor. Blok P noktasında
iken sahip olduğu ivmenin teğetsel ve radyal bileşenlerini bulunuz.
1 2
mgh mgR mv v 2 g (h R) 2(9.8)(5 2) 7.67 m/s
2
v2
2
ˆ
Ft mat mg
gj at 9.8jˆj m/s 2
ar 29.4 m/s
R
Radyal ivme
Teğetsel ivme
(10-7)
Sabit Açısal İvme ile Dönme:
Dönme hareketinin açısal ivmesi sabit ise,
ise cismin açısal hızını ve açısal konumunu
zamana bağlayan basit eşitlikler bulmak mümkündür. Benzer bağıntıları ötelenme
hareketini incelerken çıkarmıştık.
çıkarmıştık Ötelenme hareketi ile dönme hareketi arasındaki
benzerlik, aşağıdaki nicelikler arasındaki bağlar dikkate alınarak kolayca kurulabilir.
Ötelenme
Ö
x
v
a
v v0 at
1 2
x xo v0t at
2
v 2 v02 2a x xo
Dönme
0 t
1 2
0 0 t t
2
2 02 2 0
(Eş-1)
(Eş 2)
(Eş-2)
(Eş-3)
(10-8)
Ö e : Bir tekerlek
Örnek
e e e 3.5 rad/s
d/s 2 ' lik sabit
s b açısal
ç s ivme
v e ilee dönmektedir.
dö e ed .
Tekerleğin t = 0 anındaki açısal hızı 2 rad/s olduğuna göre,
a ) ilk 2 s içinde ne kadarlık açısal yer
a
yer-değiştirme
değiştirme yapmıştır?
b) t = 2 s anındaki açısal hızı nedir?
1 2
1
a ) 0t t 2(2) (3.5)(2) 2 11 rad
2
2
11
N
1.75 tur yapmıştır.
2
b) 0 t 2 3.5(2) 9 rad/s
(10-9)
Örnek : Bir CD-çalarda, bilgi okuyucu lensin yüzeye
temas ettiği noktanın çizgisel hızı 1.3 m/s' dir ve sabittir.
CD' nin boyutları şekilde verilmiştir.
a ) CD' nin iç ve dış kenarlarında iken, lens bilgi yi
h
hangi
i açısall hızlarla
h l l okur?
k ?
b ) Müzik çalma süresi 74 dak+33 s olduğuna göre,
CD kaç defa döner?
c ) İvmenin sabit olduğunu varsayarak, bu zaman aralığında
CD' nin ortalama açısal ivmesini bulunuz.
a ) v r iç
v
1.3
v
1.3
56.5
rad/s
;
22.4 rad/s
dış
3
3
riç 23 10
rdış 58 10
1 i
b) s i t i t s
2 t
2 s i
t
2
t
22.4 56.5 74 60 33
28100 tur
n
2
2
2
c ) s i t
s i
t
22.44 56.5
22
56 5
7.6 103 rad/s 2
74 60 33
(10-10)
Çizgisel ve Açısal Değişkenler Arasındaki İlişki :
Bir eksen
Bi
k
etrafında
t f d dö
dönen katı
k t cisim
i i üzerindeki
ü i d ki bir
bi P
noktasını ele alalım. t 0 anında referans çizgisi x -ekseni
üzerinde ve P noktası da A noktasında bu lunsun.
lunsun
P noktası t kadarlık bir sürede, AP yayı boyunca hareket ederek
s yolunu alır. Bu sürede referans çizgisi (OP ) açısı kadar döner.
Açısal Hız ve Çizgisel
g
Hız arasındaki ilişki :
r OP olmak üzere, yay uzunluğu s ve açısı arasındaki ilişki s r eşitliğine uyar.
ds d r
d
P noktasının çizgisel hızı: v
r
r
dt
dt
dt
Hareketin periyodu: T
çevre 2 r 2 r 2
r
hız
v
Açısal hız:
2
1
2 f T
f
(10-11)
İvme :
P noktasının ivmesi iki bileşenlidir.
ş
Birincisi "radyal
y " yyönde
O noktasına doğrudur ve merkezcil ivme olarak adlandırılır.
Büyüklüğü,
v2
ar
2r
r
if d i sahiptir.
ifadesine
hi ti
İkinci bileşen ise, P noktasının izlediği çembersel yörüngeye "teğet"
yöndedir ve teğetsel bileşen diye adlandırılır. Büyüklüğü,
dv d r
d
at
r
r
dt
dt
dt
ifadesine sahiptir.
Dolayısıyla ivme vektörü a at t ar rˆ ve büyüklüğü de,
a at2 ar2
ile verilir.
(10-12)
Dönme Kinetik Enerjisi :
Soldaki dönen katı cismi, kütleleri m1 , m 2 , m3 ,..., mi ,....
olan çok küçük parçalara bölelim. P noktası, kütlesi
mi olan i. parçacık olsun.
Katı cismin dönme kinetik enerjisi, noktasal
cisimlerin kinetik enerjilerinin toplamına eşittir:
1
1
1
2
2
K m1v1 m2 v2 .... mi vi2
2
2
i 2
1
1
1 2
2
2 2
i. elemanın çizgisel hızı vi ri K mi ri mi ri I
2 i
2
i 2
I mi ri 2 terimi, katı cismin dönme eksenine göre "eylemsizlik momenti" dir.
i
Eylemsizlik momenti katı cismin kütlesine ve dönme ekseninin konumuna
bağlı olduğu için, bilinmelidir. Katı bir cismin eylemsizlik momenti, katı
cismin kütlesinin dönme eksenine göre nasıl dağıldığını tanımlar.
1
I mi ri 2 ; I r 2 dm ; K I 2
2
i
(10-13)
Örnek : xy-düzleminde bulunan bir oksijen molekülü O2 olsun ve
ortasından dik olarak geçen z-ekseni
ekseni etrafında dönsün.
dönsün Herbir oksijen
atomunun kütlesi 2.66 1020 kg' dır ve oda sıcaklığında aralarındaki
mesafe
f 1.21
1 211010 m'' di
dir.
a) Molekülün z-eksenine göre dönme eylemsizlik momenti nedir?
b) Molekülün dönme açısal hızı 4.6 1012 rad/s ise, dönme kinetik
enerjisi nedir?
2
d
20 1.2110
a) I mr
i i mr m r 2m 2 2.66 10
2
2
2
2
11
2
2 2
10
2
I 1.951040 kg m2
1 2 1
40
12 2
b ) K I 1.95 10 4.6 10 20.6 1016 J
2
2
(10-14)
Örnek : Dört adet küçük küre şekildeki gibi hafif çubukların uçlarına
tutturulmuş
l
ve sistem
i
xy-düzlemine
d l i şekildeki
kild ki gibi
ibi yerleştirilmiştir.
l i il i i
a) Sistem y ekseni etrafında açısal hızı ile döndürülürse,
sistemin dönme eylemsizlik momenti ve dönme kinetik enerjisi nedir?
b) Sistem z ekseni etrafında açısal hızı ile döndürülürse,
sistemin dönme eylemsizlik momenti ve dönme kinetik enerjisi nedir?
a ) I y mi ri 2 2Ma
M 2
1
1
2
K y I y 2Ma 2 2 Ma 2 2
2
2
b) I z mi ri 2 2 Ma 2 2mb 2
1
1
2
K z I z 2 Ma 2 mb 2 2 Ma 2 mb 2 2
2
2
(10-15)
Bazı katı cisimlerin dönme eylemsizlik momentleri:
(10-16)
Eylemsizlik Momenti Hesabı :
Noktasal p
parçacıklardan
ç
oluşan
ş sistemlerde: I mi ri 2 bağıntısından
ğ
hesaplanır.
p
i
Katı cisimlerde: I r 2 dm bağıntısından hesaplanır.
Paralel - Eksen Teoremi :
Eylemsizlik momenti dönme ekseninin konumuna
bağlı olduğundan, her farklı dönme ekseni için I' yı
tekrar hesaplamamız gerekir.
Bunun için, çok kolay bir yöntem olan
"par
p alel-eksen teoremi" ni kullanacağız.
ğ
Üstteki M kütleli katı cismin kütle merkezinden geçen ve sayfa düzlemine
dik olan eksene göre eylemsizlik momentini (I km
k ) bildiğimizi varsayalım.
Bu eksene paralel ve h kadar uzaktaki bir P noktasından geçen
eksene göre eylemsizlik momenti (I ) şu ifadeyle verilir:
I I km M h 2
"paralel-eksen teoremi"
(10-17)
Paralel - Eksen Teoreminin İspatı :
Soldaki katı cismin, koordinatları (a,b) olan bir
P noktasından sayfa düzlemine dik olarak geçen
y
momentini (I ) bulalım.
eksene ggöre eylemsizlik
A noktasında seçilen bir elemanın kütlesi dm ve koordinatları da (x, y ) olsun.
A ve P noktaları arasındaki uzaklık r
x a y b
2
olur.
2
2
I P r 2 dm x a y b dm
2
2 ax a 2 y 2 2by b 2 dm
IP
2
b 2 dm
x
2
y2
x
dm 2 a xdm 2b ydm a
2
İkinci ve üçüncü integraller kütle merkezinin x ve y koordinatlarına karşılık
geldikleri için sıfırdır.
sıfırdır
İlk integral I km ' ye eşittir. a 2 b 2 h 2 olduğundan dördüncü integral,
h 2 dm Mh 2 bulunur. Buradan da, I I km Mh 2 sonucu elde edilir.
(10-18)
Örnek : Kütlesi M ve yarıçapı R olan çembersel bir halkanın,
aa ) yüzeyine dik ve merkezinden geçen eksene göre eylemsizlik
momenti nedir?
bb ) yüzeyine paralel ve çapı boyunca olan bir dönme eksen ine
göre eylemsizlik momenti nedir?
a ) I dmR 2 M R 2
b ) I dmy dl R sin R 3 sin 2 d
2
2
1 cos 2
2 R 3
2
0
1
3
d
R
sin
2
2
0
1
M 3
2
I
R
MR
2
2
R
(10-19)
Örnek : Kütlesi M ve uzunluğu L olan bir çubuğun merkezinden
dik olarak geçen y eksenine göre eylemsizlik momenti nedir?
I dmx 2
M
I
L
M
2
2
dx
x
x
L dx
L /2
M 3 L /2
M L3 1
2
x
dx
x
2
ML
L /2
/
3
L
3
L
8
12
L /2
2
Örnek : Kütlesi M , yarıçapı
arıçapı R vee yüksekliği
üksekliği L olan katı bir silindirin
eksenine göre eylemsizlik momenti nedir?
Silindirle aynı boyda, r yarıçaplı ve dr kalınlığında silindirik
bir kabuk seçersek, dm dV L 2 rdr bulunur.
M
3
Buna göre, I dmr 2 L 2 rdr r 2
L
2
r
dr
2
R L
R
2M 3
2M R 4 1
I 2 r dr 2 MR 2
R 0
R 4 2
(10-20)
Örnek : Paralel-eksen teoremini kullanarak,
kütl i M ve uzunluğu
kütlesi
l ğ L olan
l bir
bi çubuğun
b ğ
sol ucundan dik olarak geçen y eksenine
göre eylemsizlik momenti nedir?
2
I I km
1
1
L
2
Mh
ML M ML2
12
3
2
2
Örnek : Aynı çubuğun kütle merkezinden
L /4 kadar
k d uzaktan
k
geçen ve y eksenine
k i
paralel bir eksene göre eylemsizlik momenti
nedir?
2
1
7
L
2
2
2
I I km
Mh
ML
M
ML
k
12
48
4
(10-21)
Tork :
Katı bir cisim, O noktasından r kadar uzaktaki P noktasına uygulanan bir F
kuvvetinin etkisiyle O noktası etrafında rahatça dönebilmektedir (Şekil-a ).
Ş kil b' dde F kkuvvetii radyal
Şekild l ve teğetsel
ğ
l bileşenlerine
bil
l i ayrılmıştır.
l
O noktasından geçen çizgi boyunca etkidiği için
kuvvetin Fr bileşeninin dönmeye katkısı yoktur.
Ancak, kuvvetin teğetsel bileşeni (Ft F sin )
O noktası etrafında dönmeye sebep olur.
F kuvvetinin döndürme etkisi, OP r uzaklığına ve
teğetsel
ğ
kuvvet bileşeninin
ş
(Ft ) büyüklüğüne
y
ğ
bağlıdır.
ğ
(10-22)
T k rFt rF
Tork,
F sin
i r F bbağıntısı
ğ
ile
il tanımlanır.
l
r uzaklığı, kuvvetin O noktasına olan dik uzaklığıdır
ve kuvvet kolu olarak adlandırılır.
r F rF rFt
Torkun yönü, cisme etkiyen kuvvet,
cismi saat ibrelerinin tersi yönünde döndürüyorsa "pozitif"
saat ibreleri yönünde döndürüyorsa "negatif" alınır.
(10-23)
Örnek : Yarıçapları R1 ve R2 olan iki silindir
şekildeki
kild ki gibi
ibi birleştirilmiştir
bi l i il i i (R1 R2 ).
) Yarıçapı
R1 olan silindir üzerine sarılmış ip sağa doğru F1 ,
yarıçapı R2 olan silindir üzerine sarılmış ip aşağı
doğ ru F2 kuvvetiyle çekiliyor.
z eksenine göre oluşan net tork nedir?
R1 F1 (kˆ) R2 F2 (kˆ) R1 F1 R2 F2 kˆ
F1 5 N
N, R1 1 m
m, F2 15 N
N, R2 00.5
5 m ise
ise, net torkun
büyüklüğü ne kadardır?
5 7.5 kˆ 2.5kˆ
2.5 N m
Sili di hhangii yönde
Silindir
ö d dö
döner?? z-ekseni
k i etrafında
f d saatin
i tersii yönünde
ö ü d döner.
dö
(10-24)
Örnek : Makaraların sürtünmesiz ve ihmal
edilebilir kütlelere sahip olduğunu varsayarak,
varsayarak
kütlesi M 1500 kg olan aracı dengeleyecek
bloğ n m kütlesini bulunuz.
bloğun
b l n
K üçük m akarayı gözönüne alalım :
2 T1 M g sin
i 1500 9.8 sin(45)
i ( ) T1 5197 N
0
T1
T2
T1
rT1 3rT2 T2 1732 N
3
T2
T2 mg m 176.8 kg
g
(10-25)
Dönmede Newton'un İkinci Yasası :
Ötelenme hareketinde,
hareketinde Newton
Newton' un ikinci yasası cisme etkiyen
kuvveti cismin ivmesine bağlar. Benzer bir ilişki, kuvvetin katı
yg
ğ tork ile cismin açısal
ç
ivmesi arasında
cisim üzerine uyguladığı
da vardır. Bu ilişki, Newton' un ikinci yasasının dönmedeki
karşılığıdır.
Kütlesi m olan bir cisim r uzunluğunda ağırlıksız bir çubuğun ucuna
yapıştırılmıştır. Cisim üzerine uygulanan F kuvveti ile sistem, orijinden
geçen eksen etrafında dönsün.
Daha önceden olduğu gibi F kuvvetini radyal ve teğetsel bileşenlerine
ayıralım. Radyal kuvvetin dönmeye katkısının olmadığını biliyoruz.
Ft mat Ft r mat r m r r mr 2 I
I
bulunur (F ma ile karşılaştırınız).
(10-26)
Dönen Katı Cisimler İçin Newton'un İkinci Yasası :
r uzunluğunda
ğ
ağırlıksız
ğ
bir çubuğun
ç
ğ ucuna bağlı
ğ m kütleli parçacık
p ç
özel
durumu için, Newton' un ikinci yasasının dönme hareketindeki karşılığını
bulduk. Ş
Şimdi ise,, bunu çok
ç daha genel
g
durumlar için
ç tekrarlayalım.
y
Net bir torkun etkisiyle ( net ) O noktasından geçen eksen
etrafında dönebilen çubuk benzeri katı bir cisim olsun
olsun.
Çubuğu, O noktasından olan uzaklıkları r1 , r2 , r3 ,..., rn ve
kütleleri m1 ,m2 , m3 ,..., mn olan küçük parçalara bölelim.
bölelim
Her bir parçaya, dönme için Newton' un ikinci yasasını uygularsak;
1 I1 ; 2 I 2 ; 3 I 3 ; ....
eşitliklerini elde ederiz. Cisme etki eden toplam tork,
net 1 2 3 ... n I1 I 2 I 3 ... I n
olacaktır.
l kt
Burada, I i mi ri 2 i. elemanın dönme eylemsizlik momentidir ve I1 I 2 I 3 ... I n
t l
toplamı
d katı
da,
k t cismin
i i dönme
dö
eylemsizlik
l
i lik momentidir.
tidi
Buradan da, net I yazılır.
(10-27)
Örnek : Yarıçapı R, kütlesi M ve eylemsizlik momenti I olan bir tekerlek
şekildeki
kild ki gibi
ibi ortasından
t d geçen sürtünmesiz
ü tü
i yatay
t bir
bi aksa
k bağlıdır.
b ğl d Tekerlek
Tk lk
etrafına sarılmış hafif bir ipin ucuna da m kütlesi asılmıştır.
Sistem serbest bırakıldığında m kütlesinin çizgisel ivmesini,
ipte oluşan gerilme kuvvetini ve tekerleğin açısal ivmesini bulunuz.
Ia
mg T ma ; I TR I T 2
R
a
g
I
1
2
mR
a
g
R I
R
mR
I
mg
T 2a
R
mR 2
1
I
(10-28)
Örnek : Kütleleri m1 ve m2 olan iki blok hafif iplerle,
Kütlesi M , yarıçapı
y ç p R ve eylemsizlik
y
momenti I olan
sürtünmesiz iki özdeş makara üzerinden birbirine
bağlanmıştır.
ğ
ş
Sistem durgun halden serbest bırakıldığında, blokların ivmesi ne olur?
m1 g T1 m1a
T1 T3 m1 m2 g m1 m2 a (Eş-1)
T3 m2 g m2 a
I T T R I T T 2I a
R
I T T R I
1
2
1
2
3
2
(Eş-2)
3
(Eş-1) (Eş-2) a
m1 m2 g
I
m
m
2
1
2
R2
(10-29)
Örnek : Kütleleri m1 =2 kg ve m2 = 6 kg olan iki blok hafif
bir iple, yarıçapı R = 0.25 m ve kütlesi M = 10 kg olan disk
şeklindeki bir makara üzerinden birbirine bağlanmıştır. Tüm
yüzeylerde kinetik sürtünme katsayısı 0.36' dır ve m2 bloğu
30 o ' lik eğik düzlem üzerindedir.
Sistem serbest bırakıldığında blokların ivmesini ve makaranın
her iki yanındaki iplerde oluşan gerilme kuvvetlerini bulunuz.
T1 k m1 g m1 a ;
m 2 g sin k m 2 g cos T2 m 2 a
T1 T2 m1 m2 a g k m1 k m2 cos m2 sin
I T1 T2 R
T1 T2
I
1
a R
MR 2
0.5 Ma
R
R
2
g m2 sin k m1 k m2 cos
a
0.309 m/s 2
m1 m2 0.5M
T1 m1 ( k g a) 7.67 N
T2 T1 0.5Ma 9.22 N
(10-30)
İş ve Dönme Kinetik Enerjisi :
Bölüm-7' de, bir kuvvetin bir cisim üzerinde yaptığı işin (W ), o
cismin kinetik enerjisindeki değişime (K ) eşit olduğunu gördük.
Benzer şekilde, bir torkun dönen bir cisim üzerinde yaptığı iş, o
cismin dönme kinetik enerjisindeki değişime eşittir.
Kütlesi m olan cisim, r uzunluğunda ağırlıksız bir çubuğun ucuna yapıştırılmıştır.
Katı cismin d kadar dönmesi için F kuvvetinin yaptığı iş: dW Ft rd d
ile verilir.
Kuvvetin radyal bileşeni Fr harekete dik yönde olduğu için iş yapmaz.
i ve s aralığında
l ğ d kuvvetin
k
i yaptığı
ğ toplam
l iş:
i
s
W Ft rd d
i
olur. İş-enerji teoreminden kinetik enerjideki değişim de şu ifadeye sahiptir:
1 2 1 2 1 2 2 1 2 2 1 2 1 2
K W mvs mvi mr s mr i I s I i
2
2
2
2
2
2
(10-31)
Örnek : Kütleleri M ve m olan iki cisim L uzunluğunda ağırlıksız
bir çubuğun
ğ uçlarına yyapıştırılmıştır.
p
Çubuğa dik bir eksene göre eylemsizlik momentinin
minimum olduğu noktayı ve bu noktadan geçen
eksene göre eylemsizlik momentini bulunuz.
I mi ri 2 I Mx 2 m( L x) 2 Mx 2 mx 2 2mLx mL2
dI
0 2( M m) x 2mL
L0
dx
m
x
L
M m
m2
2
2m 2
I (M m )x 2m Lx m L
mL
M m
M m
mM 2
I
L
M m
2
2
(10-32)
Örnek : Kütlesi M ve boyu L olan çubuk, bir ucundan geçen eksen
etrafında düşey düzlemde dönebilmektedir. Çubuk şekildeki gibi
yatay konumdan serbest bırakılıyor.
a ) Çubuğun bırakıldığı andaki açısal ivmesi, kütle merkezinin ve
uç noktasının çizgisel ivmesi nedir?
b ) Çubuk düşey konuma geldiği anda açısal hızı, kütle merkezinin
ve uç noktasının çizgisel hızı nedir?
a ) I rF
at r
at ,km
L
1
2
ML Mg
2
3
L 3g 3
g
2 2L 4
;
3g
2L
2L
3g 3
at ,uç L
g
2L 2
L 1 2 11
3g
2 2
b ) Ei Es Mg I ML
2 2
23
L
3g
L 3g 1
vuç L
3 gL
v r vkm
3 gL
L
L
2 L 2
(10-33)
Örnek : Kütlesi m1 ve m2 (m1 m2 ) olan iki blok şekildeki gibi
hafif bir iple,
p , yyarıçapı
ç p R ve eylemsizlik
y
momenti I olan sürtünmesiz
bir makara üzerinden birbirine bağlanmıştır. Sistem durgun halden
y
serbest bırakılıyor.
m2 bloğu h kadar alçaldığı anda hızı ne olur?
ç
hızı nedir?
Tam bu anda makaranın açısal
1
1
1
I
1
K = K s K i = m1v 2 + m 2 v 2 + I 2 0 m1 m 2 2
2
2
2
R
2
U = U s U i = m1 gh m2 gh
2
v
v
R
1
I 2
K U 0 m1 m2 2 v m1 gh m2 gh 0
2
R
2(m2 m1 ) gh
v
I
m
m
1
2
R2
v 1 2(m2 m1 ) gh
I
R R
m
m
1
2
R2
(10-34)
Güç :
Güç, bir kuvvet tarafından işin yapılma hızı olarak tarif edilir.
Güç
edilir
Dönme durumunda ise güç, tork tarafından işin yapılma hızı
olarak tarif edilir.
Cisim d kadar döndüğünde, torkun yaptığı iş dW d
ğ
göre,
g , güç
g ç ifadesi
olduğuna
dW d
d
d
P
dt
dt
dt
şeklinde elde edilir. (P F v ile karşılaştırınız).
İş-Dönme
ş
kinetik enerjisi
j teoremini özetleyecek
y
olursak:
s
W d
;
tork sabit ise
W s i
i
1 2 1 2
I s I i
2
2
Güç
W K
P
İş-Dönme Kinetik Enerjisi Teoremi
(10-35)
Ötelenme ve Dönme Hareketleri Arasındaki Benzerlik :
Ötelenme
Dönme
x
v
a
v v0 at
at 2
x xo v0t
2
v 2 v02 2a x xo
1 2
mv
2
m
F ma
K
F
W= F .dx
P F v
0 t
0 0 t
t2
2
2 02 2 0
K
1 2
I
2
I
I
W= .d
P
(10-36)
BÖLÜM-11
BÖLÜM
11
M
I
R
I
Yuvarlanma, Tork ve Açısal Momentum
D
Bu bölümde şu konulara değineceğiz:
.
R
A
L
Y
LE
L
I
Y
Çembersel cisimlerin yuvarlanması ve sürtünmeyle olan ilişkisi
Tork’ a genel bir bakış
D
e
v
T
A
L
O
Dönmede Newton’ P
un ikinci yasası
A
F korunumu
Açısal momentumun
A
T
Açısal S
momentumun korunumu ile ilgili uygulamalar
U
M
.
R
D
Parçacık ve parçacık sistemlerinin açısal momentumu
(11-1)
Ötelenme + Dönme = Yuvarlanma
Bir yüzey üzerinde kaymadan yuvarlanan çembersel kesitli
M
I
R
I
D
L
YI
bir cisim düşünelim.
A
L
Y
Cismin bu hareketini, kütle merkezinin ötelenmesi ile
kütle merkezi
E
L
.
etrafındaki dönme hareketinin bir toplamı olarak düşünebiliriz.
R
D
e t = 0 ve t = t anlarında çekilmiş
Kaymadan yuvarlanan bir bisiklet tekerleğinin
v
T
resimleri yukarıda verilmiştir.
verilmiştir
A
L
O
P i ttekerleğin
Y d ddurgun olan
Yerde
l bir
bi gözlemci,
ö
l
k l ği kütle
kütl merkezi
k i O noktasının
kt
v hızıyla
h l
A
F
ilerlediğini görecektir.
A
T
S
U
M zeminle temas ettiği P noktası da aynı hızla hareket edecektir.
Tekerleğin
.
R
D
1
2
km
(11-2)
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
s kadarlık bir çizgisel yol alırlar.
Dolayısıyla,
T
A
L
O
P
ds
ds
d
v
(E A
(Eş-1)
1) ; s R
R
=R (E
(Eş-2)
2)
F
dt
dt
dt
A
T
S
B iki eşitlik
Bu
itlik birleştirilirse,
bi l ti ili
kaymadan
k
d yuvarlanan
l
bi
bir cisim
i i iiçin:
i
U
vM R
.
R
D eşitliği elde edilir.
t1 ile t2 zaman aralığında O ve P noktalarının her ikisi de
km
km
(11-3)
M
I
R
vkm DRI
L
I
Y
A
L
Y
E v / R açısal hızıyla
Yuvarlanmanın, v hızıyla ötelenme ve kütle merkezi etrafında
L
.
p
olduğunu
ğ
biliyoruz.
y
dönme hareketlerinin toplamı
R
D
ehareketin hızlarının vektörel toplamıdır.
Cisim üzerindeki her noktanın hızı, bu iki
v
Saf
S f dö
dönme hhareketinde,
k ti d hhız noktadan
kt dATnoktaya
kt değişmektedir
d ği kt di ve büyüklüğü
bü üklüğü
L
O noktasından olan uzaklık rO
olmak üzere, r' ye eşittir .Yönü de, her noktada
P
çembere teğettir (Şekil-A
a).
F
A
Saf ötelenme hareketinde,
her
noktanın
hız
vektörü
(
v
) aynıdır (Şekil-b).
T
S
YuvarlanmaU
hareketinde hız, bu iki hızın vektörel toplamıdır. Buna göre, P noktasının
M
hızı her
zaman sıfır, O noktasının hızı v (r 0) ve en üstteki T noktasının hızı da
.
R
2v ' dır.
D
km
km
km
km
km
(11-4)
Yuvarlanma Hareketi ve "Saf Dönme":
Yuvarlanma hareketine değişik bir bakış şekildeki gibidir.
gibidir
M
I
Bu hareket, tekerlekle yolun temas ettiği P noktasından
Rdik
I
D
v
L
I "saf dönme"
olarak geçen eksene göre açısal hızı
olan
Y
R
A
L
hareketi olarak değerlendirilebilir.
ğ
Y
E bulmak için, hızın
Tekerlek üzerindeki her noktanın hızını
L
.
o noktadaki büyüklüğünü ve yönünü
bilmemiz gerekir
gerekir.
R
D
e
v
Hızın yönü, çembere her noktada teğettir. Örneğin, A noktasının hızı v , A ve P
T
Açizgilerle gösterilen doğruya diktir.
noktalarını birbirine bağlayan, kesikli
L
O
r , P noktasına olan uzaklığı göstermek
üzere, tekerlek üzerindeki her noktanın
P
çizgisel hızı v r ile verilir.
A
F
A
T r 2R olduğundan,
Örneğin,
ğ , T noktasında
ğ
, v 2 R 2v ,
S
O noktasındaUr R olduğundan, v R v ve
M
.
P noktasında
r 0 olduğundan,
ğ
, v 0' dır.
R
D
km
A
T
O
km
km
P
(11-5)
Yuvarlanmada Kinetik Enerji :
Solda, yuvarlanan
Solda
arlanan bir cisim verilmiştir.
erilmiştir Bu
B cismin P değme
noktası etrafında "saf dönme" hareketi yaptığını düşünürsek,
ki ik enerjiyi
kinetik
ji i hhesaplamak
l
k çok
k kkolay
l olacaktır.
l k
Cismin kütlesi M ve yarıçapı da R olsun.
M
I
R
I
D
L
YI
A
L
Y
E
I , P noktasına göre dönme eylemsizlik momenti olmak
üzere, kinetik enerji
L
.
R
1
K I bağıntısı ile verilir.
D
2
e
v
I paralel
paralel-eksen
eksen teoreminden bulunabilir,
bulunabilir
T
A
L
1
1
1
1
1
I I MR K I O
MR I MR I Mv
P
2
2
2
2
2
A
bulunur.
F
A
T , kütle
Buu ifadedeki
adede ilkSte
terim,
üt e merkezi
e e O etrafında
et a da aç
açısal
sa hızıyla
y a dö
dönen
e ccismin
s
kinetik
et
U
enerjisini, ikinci
terim ise v hızıyla ötelenen cismin kinetik enerjisini temsil eder;
M
.
1
1
K RI Mv
M
D2
2
P
P
2
P
P
2
2
km
km
2
2
km
2
2
2
km
2
km
km
km
2
2
km
(11-6)
Örnek : Yarıçapı r olan katı bir küre, R yarıçaplı yarım
kü şeklindeki
küre
kli d ki bir
bi kabın
k b içinde
i i d düşeyle
dü l açısı yapacak
k
şekilde ilk hızsız serbest bırakılıyor. Küre kaymadan
yuvarlandığına göre, kabın en alt noktasındaki açısal hızı
ne olur?
A
L
Y
LE
Ei E s
M
I
R
I
D
L
YI
.
R
Referans noktamız O noktası (r yarıçaplı kürenin
merkezi) olsun
olsun.
D
1
1 ve 1
12
mg R r (1 cos ) mv I mr mr
T
2
2
2
25
A
L
O
10 g R r (1 cos )
7
P
g R r (1 cos ) A
r
10
7r
F
A
T
S
U
M
.
R
D
2
km
2
2
2
2
2
2
2
2
(11-7)
Sürtünme ve Yuvarlanma :
Sabit bir hızla yuvarlanan bir cisim (şekil - a) durumunda
durumunda, değme
noktası P' nin kayma eğilimi yoktur ve dolayısıyla bu noktada
M
I
R
I
D
sürtünme kuvveti yoktur.
yoktur
L
I
Y
Yuvarlanan cisme net bir kuvvet etkimesi A
durumunda, kütle
L
Y
merkezi
k i sıfırdan
f d ffarklı
kl bi
bir a iivmesine
i sahip
hi olur
l (Ş
(Şekilkil b).
)
E
L
.
Yuvarlanan cisim sağa doğruR
ivmeleniyorsa, P noktası sola
D Bu nedenle, statik sürtünme
doğru kayma eğilimindeeolurdu.
v
kuvveti f sağa
ğ doğru
ğ olacaktır. f f
olduğu
ğ sürece
T
A
L
hareket düzgündür, yani kayma yoktur.
O
Kaymadan yuvarlanan bir cisimP
için v R' dir. Her iki tarafın zamana göre türevi
A
F kütle merkezinin çizgisel ivmesi (a ) ile açısal ivmesi ( )
alınırsa, yuvarlanan cismin
A
T
arasındaki ilişkinin:
S
dvMU d
a .
R
R
dt
dt
R
D
km
s
s
s ,max
max
k
km
km
km
km
olduğu görülür.
(11-8)
Eğik Düzlemden Aşağı Doğru Yuvarlanma :
Kütlesi M ve yarıçapı R olan yuvarlak düzgün bir cisim
cisim,
M
I
eğim açısı olan eğik bir düzlemden aşağı doğru kaymadan
R
I
yuvarlanmaktadır x -ekseni
yuvarlanmaktadır.
ekseni boyunca ötelenmeIL
veD
dönme
Y
hareketi için Newton' un ikinci yasasını A
uygulayarak
cismin
L abiliri
kütle merke
merkezinin
inin ivmesini
i mesini (a ) hesaplayabiliriz.
hesapla
Y
E
L
.
x -ekseni y
yönünde ötelenme için Newton' un
ikinci y
yasasından:
R
f Mg sin Ma
(Eş-1) e D
v
T
ANewton' un ikinci yasasından:
Kütle merkezi etrafında dönme için
L
a PO
a
a
Rf I ,
Rf I
f I
(Eş-2)
(Eş
2)
A
R
R
R
F
A
aT
g sin
Buradan da,
da I S
Mg sin Ma
a
I
R
U
1
M
MR
.
R
sonuc
sonucuna
ulaşılır.
D una ulaşılır
km
s
km
s
km
k
km
k
km
km
2
s
kkm
kkm
km
s
km
k
km
2
k
km
km
2
(11-9)
akm
Silindir
Çember
I km MR 2
akm
akm
akm
akm
g sin
1 MR 2 / MR 2
g sin
11
1
g s in
2
S
U
MR
2
.
R
2
akm
akm
k
km
A
T
km
akm
2
1 MR 2 / 2 MR 2
g sin
1 1/ 2
2
g sin
3
I
D
L
YI
2
MR 2
5
g sin
1 I km / MR 2
akm
km
A
F
A
L
Y
E
LKüre
D
e
v
gTsin
a A
L
1 I / MR
O
P
g sin
a
I km
g sin
1 I km / MR 2
M
.
R
D
M
I
R
g sin
I
1 km 2
MR
I km
akm
akm
g sin
1 2 MR 2 / 5MR 2
g sin
1 2 / 5
5
g sin
7
(11-10)
Yo - Yo :
Kütlesi M , yarıçapı R ve aksının yarıçapı da R0 olan Yo-Yo
M
I
bir ip boyunca aşağıya doğru yuvarlanarak iniyor. Daha
Rönceki
I
D
problemde olduğu gibi
gibi, y-ekseni
ekseni boyunca ötelenme
ve dönme
L
I
Y cismin
hareketi için Newton' un ikinci yasasını uygulayarak
A
L
kütl merkezinin
kütle
k i i iivmesini
i i (a ) hhesaplayabiliriz.
l bili i
Y
E
L
.
y -ekseni boyunca
y
ötelenme için
ç RNewton' un ikinci y
yasasından:
D
Mg T Ma
(Eş-1)
e
v
T
Kütle merke
merkezii etrafında
dönme için Newton'
Ne ton' unn ikinci yasasından:
asasından:
A
L
a
a
RTP
IO ,
T I
(Eş-2)
R
R
A
Fa
g
A
Buradan da, MgT I
Ma a
S
I
R
U
1
M
MR
.
R
Sonucuna
ulaşılır.
D
km
km
0
km
km
km
0
km
km
2
0
km
km
km
2
0
km
2
0
(11-11)
Tork :
Bölüm 10
10' da,
da bir eksen etrafında dönen katı bir cisme etkiyen torku ( )
M
I
hesapladık. Şimdi de, herhangi bir doğrultuda hareket eden bir cismeIR
D
etkiyen torku belirli bir noktaya göre hesaplayacağız.
hesaplayacağız
L
I
Y
A göre konum
Bir cisme etkiyen F kuvvetinin uygulanma noktasının belirli bir noktaya
L
Y
vektörü r ise, bu kuvvetin oluşturduğu tork r F ifadesi
ile
verilir.
E
L
.
Aşağıdaki şekilde, r ve F her ikisi de xy -düzlemindedir.
Sağ-el kuralından, torkun
R
z -ekseni yönünde olduğunu kolayca görebiliriz. D
e
v
T
r F
A
L
O
P
A
F
A
T
S
U
M
r ile F.arasındaki açı olmak üzere, torkun büyüklüğü rF sin ' dir.
R
OD
AB üçgeninden, r sin r r F bulunur ve Bölüm 10' daki tanımı ile uyumludur.
(11-12)
Açısal Momentum :
Çi i i l momentumun (p mv ) dö
Çizigisel
dönme hhareketindeki
k i d ki
M
I
R
I
D
L
YI
karşı-geliri açısal momentum vektörüdür. Bu yeni vektör,
r p ile tanımlanır.
Soldaki resimde, r ve p her ikisi de xy -düzlemindedir.
düzlemindedir.
Sağ-el kuralını uygulayarak ' nin z -ekseni yönünde
olduğunu kolayca bulabiliriz.
bulabiliriz
.
R
A
L
Y
LE
D
e
v
r ile p arasındaki
açı olmak üzere,
T
A
açısal momentumun
büyüklüğü
L
O
P
rmv sin ' dir.
A
O
F AB üçgeninden: r sin r r mv
S
U
A
T
bulunur.
Not : Açısal momentum, orijinin nerede seçildiğine bağlıdır. Orijini kaydırırsak,
M
.
açısal momentum için farklı bir değer buluruz. SI sistemindeki birimi kg m / s
R
D J s ' dir.
veya
2
(11-13)
Örnek : xy düzleminde hareket eden 1.5 kg kütleli bir cismin hızı v = 4.2iˆ 3.6ˆj (m/s)
il veriliyor.
ile
ili
Cismin
Ci i konumu
k
r = 1.5i+2.2
1 5iˆ 2 2ˆj (m)
( ) olduğunda,
ld ğ d açısall momentumu ne olur?
l ?
M
I
R
p = mv = 1.5
1 5( 44.2i
2iˆ 33.6
6ˆj ) = 66.3i
3iˆ 55.4
4ˆj
ˆi
ˆj
kˆ
A
L
Y
LE
I
D
L
YI
l r p 1.5 2.2 0 1.5 (5.4) 6.3 (2.2) kˆ = 22kˆ (kg m 2 /s)
6.3 5.4 0
.
R
D
e bir cismin herhangi bir andaki konumu
Örnek : xy düzleminde hareket eden 2.0 kgvkütleli
T
ˆ
ˆ
A momentumunu bulunuz.
r = 6.0i+5.0tj (m) ile veriliyor. Cismin açısal
L
O
P
dr
v
5.0ˆj Ap mv 2.0 5.0ˆj 10.0ˆj
F
dt
A
ˆiST ˆj
kˆ
U
l r . pM
6.0 5.0t 0 60.0 kˆ (kg m /s)
R
0 10.0 0
D
2
(11-14)
Örnek : Uzunluğu L olan hafif bir ipin ucuna bağlı m kütlesi,
şekildeki
kild ki gibi
ibi yatay
t düzlemde
dü l d dairesel
d i l hareket
h k t yapıyor
M
I
R
(konik sarkaç). Hareket süresince ipin düşeyle yaptığı
açısı sabit olduğuna göre, cismin açısal momentumunu
bulunuz.
v2
T sin m
v2
R tan
R
gR
T cos mg
v gR
R tan
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
p mv m gR
R tan
A
L
O
P yönde net açısal momentum sıfırdır.
l r pl
0 Aradyal
sıfırdır
F yönünde net bir açısal momentum vardır.
l l sin z -ekseni
A
T
S
U
sin
M
l . Lp sin(90) sin Lm gR tan sin m gL
cos
R
D
R L sin
r , net
z
2
z
3
4
l
(11-15)
Newton'un ikinci yasasının açısal formu :
M
dp
I
Ötelenme hareketi için Newton' un ikinci yasası: Fnet
' dir. IR
dt
D
L
Bunun dönme hareketindeki karşı-geliri nedir?
YI
A
L
Y
LE
d
d
dr dv
mr v
m r v m v r m v v r a
dt
dt
dt
dt
d
v v 0
m r a r ma r Fnet net
dt
.
R
D
e
v
T
A
L
O
P
d
Dönme hareketinde
Newton' un ikinci yasası: net
' dir.
A
dt
ST
A
F
.
R
U
M
D
(11-16)
Parçacık Sistemlerinin Açısal Momentumu:
M
n tane parçacıktan oluşan bir sistemde, parçacıkların
I
R
I
ç momentumları 1, 2 , 3 ,,...,, n olsun.LSistemin
açısal
D
YI
toplam açısal momentumu:
A
L
Y
E ile verilir.
L ...
L
.
R
D
Her iki tarafın zamana göre türevinden,
e
v
n
n
d i
d i AT
dL
dL
=
,
L net,i
net,i net
O
dt i 1 dt
dt
dt
i 1
P
A
bulunur. Bu tork,
sistem üzerine etki eden dış torktur.
F
A
T
S
Newton'U
un üçüncü yasası gereği, parçacıkların birbirlerine
M
.
uyguladıkları
torkların (iç tork) toplamı sıfırdır.
R
D
n
1
2
3
n
i 1
i
(11-17)
Bir Eksen Etrafında Dönme, Katı Cismin Açısal Momentumu :
Dönme eksenini z -ekseni
ekseni olarak alalım ve katı cismi kütleleri mi ,
konum vektörleri ri olan n tane parçaya bölelim. i. elemanın açısal
momentumu i ri pi ve büyüklüğü de i ri pi sin 90 ri mi vi
M
I
R
I
D
L
YI
A
L
Y
E vardır ve büyüklüğü,
Açısal momentumun sadece z -bileşeni
L
.
sin r sin m vR r m v
D
e
bulunur.
v
A
Açısal
l momentumların
l ATz -bileşenlerinin
bil
l i i toplamı
l
d
da:
L
O
L P
r
m
v
r
m
r
m
r
A
F
A
olacaktır.
T
S
mMr Utoplamı, katı cismin dönme eylemsizlik momenti olduğundan:
.
R
D
Lz I
ifadesine sahiptir.
i
iz
i
i
n
z
n
i 1
i 1
i
i
n
iz
i 1
i i
i
n
i
i i
i 1
i i
n
i
i
i
i 1
2
i i
2
i i
(11-18)
Örnek : Kütlesi 6 kg
g ve yyarıçapı
ç p 12 cm olan bowling
g topu
p
M
I
kendi ekseni etrafında saniyede 10 defa dönmektedir.IR
Topun açısal momentumu nedir?
.
R
L I
A
F
A
L
O
P
A
L
Y
LE
D
L
YI
D
e
v
T
A
T2
2
I mR
R 2 (6)(12 102 ) 2 345.6
345 6 104 kg m 2
5
5
S
U
D
M
.
RL I L
4
2
345
345.6
6
10
10
2
2
2.17
17
kg
m
/s
(11-19)
Örnek : Kütlesi M ve uzunluğu l olan çubuk, kütle merkezinden
dik olarak geçen eksen z -ekseni
ekseni etrafında rahatça dönebilmektedir
dönebilmektedir.
İki ucuna m1 ve m2 kütlelerine sahip bilyeler monte edilmiş sistem
düşey düzlemde
dü
dü l d hhızı ile
il dönmektedir.
dö
kt di
a ) Sistemin açısal momentumu nedir?
M
I
R
I
D
L
YI
A
L
b ) Çubuk yatayla açısı yaptığı bir anda sistemin açısal ivmesi
ne olur?
Y
E
L
.
R
1
l
l
D
l M
a ) L I I Ml m m e m m
12
4 3
2
2
v
T
l M
A
L I m m L
4 3
O
P
A
F l
A
l
T m g cos m g cos 2 m m g cos
S
2
2
U
b ) I
M
l M
M
.
l
m
m
R
m m
3
4 3
D
2
2
2
2
1
2
1
2
2
1
2
1
2
1
2
2
1
2
1
2
(11-20)
Örnek : Şekildeki gibi, bir noktadan sabitlenmiş hafif iple sarılmış R
yarıçaplı, M kütleli bir disk verilmiştir. Sistem serbest bırakıldığında,
M
I
R
a) ipte oluşan gerilme kuvvetini ve diskin kütle merkezinin ivmesini
bulunuz.
I
D
L
YI
b) disk h kadar alçaldığı andaki hızını bulunuz.
A
L
a
1 Y a 1
a ) Mg T Ma ; I TR I T E
MR
Ma
R
2
2
L
R
.
1
Mg
2R
Mg Ma Ma a
D g
1 e
2
3
v
M
M
T
2
A
L
2
1
O
T M ( g a) M ( gP g) Mgg
3
3
A
F1
A
T Mv 1 I 1 Mv 1 1 MR 3 Mv
b ) E E SMgh
2
2
2
22
4
U
M
.
4
R
vD
gh
h
3
2
2
i
s
2
2
2
2
2
2
(11-21)
Örnek : Kütlesi M , yarıçapı R olan bir çim biçme silindirine yatay
doğrultuda şekildeki gibi bir F kuvveti uygulanıyor. Silindir yatay
düzlemde kaymadan yuvarlanmaktadır. Kütle merkezinin ivmesinin
2F
F
ik sürtünme
ü ü
kkatsayısının
ld ğ
gösteriniz.
ö i i
ve statik
olduğunu
3Mg
3M
a
I fs R I R
M
I
R
I
D
L
YI
A
L
Y
L2E a 1
1
.
f s MR
2 Ma
R
2
D2
R
e
v
T
A
2F
1L
F f s Ma M P
OM a F a
3M
3M
A 2
F
A
T
S
22F
F F
F
U
f Mg F Ma F M
M
3M 3
3Mg
.
R
D
s
s
s
(11-22)
Örnek : Kütlesi m, yarıçapı r olan bir küre, eğik bir düzlem üzerinden şekildeki gibi h
yüksekliğinden ilk hızsız bırakılıyor (h > r ) ve kaymadan yuvarlanarak R yarıçaplı
M
I
R
çembersel bir yola giriyor. a) Çembersel yoldaki turu tamamlayabilmesi için minimum
h yüksekliği ne olmalıdır.
a ) Ei Es
1 2 12 2 2 1 2
I mr mv
2
25
5
A
L
Y
LE
I
D
L
YI
1
1
mgh 2mgR mv 2 I 2
2
2
1
1
7
7 2
mgh 2mgR mv 2 mv 2 2mgR mv 2 h 2 R
v
2
5
10
10 g
10g
Çemberin içinde dairesel hareket yapan küre çemberin en tepesinde iken üzerine etki
.
R
D
e
v
v
eden
d merkezcil
k il kuvvet:
k
t N mg mAT olacaktır.
l kt h' nin
i minumum
i
olması,
l
h
hızın
dda
R
L
O
mimumum olmasını sağlayacaktır.
P Bu noktada hızın minumum olması için N 0 olmalı.
A 7 v 2R 7 gR 2 7 R 2.7 R
v gR ve hF 2 R
A
10 g
10 g
10
T
S
b ) h =
3R durumunda,
P noktasında küreye etki eden merkezcil kuvvet nedir?
U
M7 v 3R 2R 7 v v 10 gR
h 2.R
10 g
10 g
7
R
D
2
min
min
2
P noktasında merkezcil kuvvet: Fmer
2
min
2
2
v2
10 gR 10
m m
mg
7R
7
R
(11-23)
Açısal Momentumun Korunumu :
M
I
R
K t cisimlerde
Katı
i i l d dahil,
d hil tüm
tü parçacıkk sistemleri
i t l i için
i i Newton'
N t ' un
dL
ikinci yasasının açısal formu:
net ' tir.
tir
dt
I
D
L
YI
A
L
Eğer sistem üzerine etkiyen net tork sıfırsa
(
0):
Y
E
L
dL
.
0 L sabit olur. Bu, açısal
ç
momentumun korunum
R
d
dt
D
e
ilkesidir.
v
T
A
Bir başka deyimle;
L
O
gPbir t anındaki Herhangi
g bir t anındaki
Herhangi
A
=
net
açısal
momentum
net
açısal
momentum
F
A
L
L
ST
net
i
.
R
U
M
i
s
s
Not : Dış torkun belli bir eksen yönündeki bileşeni sıfırsa, açısal
momentumun o eksen yönündeki bileşeni değişmez (korunur).
D
(11-24)
Resimdeki öğrenci, düşey eksen etrafında dönebilen
M
I
R
bi taburenin
bir
b
i üzerinde
ü i d oturmaktadır.
k d Kollarını
K ll
iki
I
D
L
YI
yana açan öğrencinin ellerinde özdeş ağırlıklar
varken i açısal hızıyla dönmektedir. Bu durumdaki
açısal momentum vektörü L dönme ekseni boyunca
A
L
Y
yukarı yöndedir (Şekil-a ).E
L
.
R
Öğrenci belli bir anda kollarını topluyor (Şekil-D
b) ve bu hareket sonucunda, dönme
e
v
eylemsizlik momenti, I ' den daha düşük
bir değer olan I ' ye düşüyor. Öğrenci ve
T
A
tabure sistemi üzerine dış bir tork L
etkimediğinden,
açısal momentum korunur.
O
Pt anında: L I olduğundan,
t anında: L I ve
olduğundan
A
F
A
I
T
L L IS
I
bulunur.
I
U
M
I
.
I IR 1 . Öğrenci son durumda daha hızlı döner.
döner
D I
i
i
i
i
s
i
i
i
s
i
s
s
s
s
s
i
s
s
i
s
s
i
i
s
i
s
(11-25)
Örnek : Düşey eksen etrafında rahatça dönebilen bir taburenin
M
I
R
üzerindeki öğrencinin elinde, 3.9 devir/s' lik bir açısal hızla
I
D
L
tekerleği vardır. Öğrenci, belli bir anda tekerleği
YI aynı açısal
yönde dönecek şekilde
ş
çeviriyor.
ç
yLABunun sonucunda,
hızla ters y
Y
öğrencinin açısal hızı ne olur? LE
.
Öğrenci (öğ) + tabure
tabure (t)
R
D
birleşik sisteminin toplam
dönme eylemsizlik momenti
e
v
I + I = 6.8
kg m
T
A
L
I 1.2 kg m ; 3.9O
dev/s ; I
6.8 kg m ?
P
A
L L L L F L
L
2L
A
T
S
U
2I
2 1.2 3.9
M
2 I . I
1.4 dev/s
I
68
6.8
R
D
dönen ve eylemsizlik momenti 1.2 kg m2 olan bir bisiklet
öğ
2
bt
i
s
bt
bt
bt
öğ t
t
bt
öğ t
bt
öğ
2
öğ t
öğ
öğ t
bt
2
öğ
bt
bt
öğ t
(11-26)
Örnek : Yarıçapı R 2 m, kütlesi M 100 kg olan disk şeklindeki
bi platform,
bir
l tf
merkezinden
k i d dik olarak
l k geçen eksen
k etrafında
t f d rahatça
ht
dönebilmektedir. Kütlesi m 60 kg olan bir öğrenci platformun dış
kenarı üzerindeyken platformla birlikte 2 rad/s hızla dönmektedir.
A
L
Y
LE
Öğrenci daha sonra platformun merkezine doğru yürümeye başlıyor.
r 0.5 m noktasına geldiğinde öğrenci+platform hangi hızla döner?
Ii
Li Ls I ii I ss s i
I s ve
.
R
M
I
R
I
D
L
YI
D
T
A
1
1
2
2
2
I i MR mR ; I s MR 2 m r
2
2
A
F
L
O
P
1
2
2
MR mR
200 240
2
s
i
((2)) 4.1 rad/s
2
1
200 15
2
MR
m
r
2
S
U
A
T
M
.
R
D
(11-27)
Örnek : Kütle merkezinden dik olarak geçen eksene
M
I
R
göre eylemsizlik
l
i lik momentii 12 kg
k m 2 ve uzunluğu
l
4 m olan ince bir çubuk şekildeki gibi düşey olarak
durmaktadır. Kütlesi 2 kg olan bir cisim 15 m/s yatay
A
L
Y
yönde yoluna devam ediyor. Çarpışmadan sonra cismin
E
L
.
çizgisel hızı ve çubuğun açısal hızı nedir?
R
D
v
e
L L rmv rmv I v
rmv I
T
r
A
L
m
2 O
v
v
15 6 m/s
P
I
A 12
m
2
F
r A
4
T
S
vsMU
6
s . 3 rad/s
r 2
R
D
hızla çubuğun tepe noktasına esnek olarak çarpıp aynı
i
s
i
s
s
s
I
D
L
YI
s
i
2
(11-28)
Örnek : Kütlesi M olan tahta bir blok sürtünmesiz yatay bir
masa üzerinde
ü erinde kütlesi ihmal edilebilir l uzunluğuna
nl ğ na sahip
M
I
R
I
D
dik eksen etrafında serbes
serbestçe
tçe dönebilmektedir.
dönebilmektedir Kütlesi m olan
L
I
Y
bir mermi çubuğa dik doğrultuda v hızıyla tahta bloğa çarpıp saplanıyor.
Mermi+blok
A
L hangi oranda bir
sisteminin çarpışmadan sonraki açısal hızı
hı ı ne ol
olur?
r? Bu
B çarpışmada
Y
E
L
kinetik enerji kaybı olmuştur?
.
R
L L
D
e
v
lmv
mv
lmv I
T
M m l LA
M ml
O
P
1
1
mv I A
M m l
K K
I
m
2
2
F
1 1
A
1 T
K
m
v
m
M
m
l
mv
S
2
U
K K M
m
M
.
1
KR
M m M m
D
ince bir çubuğa monte edilmiştir. Çubuk diğer ucundan geçen
i
s
2
2
i
2
2
2
2
s
2
i
i
s
i
(11-29)
Ötelenme ve Dönme Hareketleri Arasındaki Benzerlik :
Ötelenme
x
v
a
p
1 2
K mv
2
m
F ma
F
S
U
D
M
.
R
A
T
1 2
K I
2
I
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
A I
L
O
P
A
F
P Fv
dp
Fnet
dt
p mv
Dönme
P
d
net
dt
L I
(11-30)
BÖLÜM-12
Titreşimler
Bu bölümde şu ana başlıklara değinilecektir:
M
I
R
I
D
L
YI
A
L
Basit harmonik harekette yer
yer-değiştirme
değiştirme, hız
ve ivme
Y
E
L
Basit harmonik salınıcının enerjisi .
R
Harmonik salınıcılara örnekler: D
e
v
i. Kütle
Kütle-yay
yay sistemi T
A
L
ii. Basit sarkaç O
P
A
iii. Fiziksel
sarkaç
F
A
T
S
iv Burulma sarkacı
iv.
U
M
.Sönümlü
harmonik hareket
R
D
Zorla salınımlar/rezonans
(12-1)
Basit Harmonik Hareket :
Şekil-a ' da basit harmonik hareket yapan bir cisim resmedilmiştir.
.
R
A
F
A
L
O
P
A
L
Y
LE
x(t ) x
D
e
v
T
m
M
I
R
I
D
L
YI
cos t
A
T
Cismin yer-değiştirmesi x(t ) xm cos t bağıntısı ile verilir ve zamanla
S
U
nasıl değiştiği Şekil-b' de resmedilmiştir.
M
.
R
D
(12-2)
x(t ) xm cos t
Konum fonksiyonu = cismin denge noktasına olan uzaklığı
M
I
x niceliği "genlik" olarak bilinir ve cismin maksimum yer-değiştirmesidir.R
I
D
niceliği de hareketin "açısal frekans" ıdır ve
L
I
Y
2
A
2 f
L
T
Y
ifadesine sahiptir ve SI sisteminde birimi rad/s' dir. LE
.
R
birimi radyandır.
ır
t ise t anındaki faz açısıdır ve SI sisteminde
D
e
v
niceliği, salınıcının "faz sabitidir" ve salınan cismin t 0 anındaki x(0)
T
A SI sisteminde birimi radyandır.
konumuna ve v(0) hızına bağlıdır.
L
O
P
Hareketin zaman içinde
kendisini
tekrarladığına dikkat ediniz.
ediniz
A
Fgeçen süre "period (T )" olarak tarif edilir.
Bir tam salınım için
A
T
S
SI sistemindeki
i t iU
d ki bi
birimi
i i saniye
i dir
di .
M
.
Birim
zamandaki salınım sayısı
y "frekans (f )" olarak tanımlanır.
R
Dsistemindeki birimi hertz (s )' dir.
SI
m
-1
(12-3)
x ( t ) x m cos t
0 durumunda x(t ) xm cos t' dir
ve ŞekilŞ kil a' da
d çizilmiştir.
i il i ti
M
I
R
I
D
L
B it H
Basit
Harmonik
ik S
Salınıcının
l
H I:
Hızı
Y
dx(t ) d
x cos t L
x sin t
v(t )
A
Y
d
dt
dt
d
E
L
.
x çarpımı hızınRalabileceği maksimum
D
değerdir (v v).e 0 durumunda
v(t ) A
vT sin
i t' di
dir ve Şekil
Ş kil-b' dde çizilmiştir.
i il i ti
L
O
P
m
m
m
m
m
A
Basit Harmonik Salınıcının
İvmesi :
F
A
dv (t ) d T
a (t )
S x sin
i t x cos t x (t )
U
dt
dt
M
.
xRivmenin alabileceği
ğ maksimum değerdir
ğ
(a )).
D
m
2
m
2
2
m
m
0 durumunda a(t ) 2 xm cos t' dir ve Şekil-c' de çizilmiştir
(12-4)
Basit Harmonik Hareket İçin
ç Kuvvet Yasası :
Basit harmonik salınıcı için a (t ) x(t ) olduğunu biliyoruz.
2
M
I
R
I
D
L
I
Y
Newton' un ikinci yasasına göre: F ma m x A
m x olur.
L
Y
E
L
.
"Bir cisme etkiyen
y net kuvvet ile cismin y
yer-değiştirmesi
ğş
arasında,,
R
D
Hook Yasası olarak bilinen, F Ce x şeklinde bir ilişki varsa
v
T
(burada C bir sabit)
sabit), o cisim basit
harmonik hareket yapıyor
yapıyor" denir.
denir
A
L
O
P
B durumda,
Bu
d
d basit
b i hharmonik
ik salıcının
l
periyodu
i d
A
F
A
m
T
S
m C T 2
olarak bulunur.
lunur
U
C
M
.
R
D
2
2
2
(12-5)
M
I
R
I
D
L
YI
A
L
Üstte sürtünmesiz bir düzlemde, yay sabiti
k olan bir
Y
E
L
yaya bağlı m kütleli cismin hareketi
resmedilmiştir.
.
R
D
eHooke yasasına uyar: F kx.
m kütleli cisme etkiyen net kuvvet
v
T
B
Bunu,
F Cx
C il
ile karşılaştırırsak
k l A k C = k bbulunur.
l
L
O
P
B d dda, hhareketin
Buradan
k ti açısall frekansı
f k
ve periyodu
i d
A
F
A
CST k
m
m
U
ve T 2
2
m
m
C
k
M
.
R
l k hesaplanır.
h
l
D olarak
(12-6)
Basit Harmonik Hareketin Enerjisi :
Basit harmonik hareket yapan bir cismin mekanik enerjisi E , herhangi bir
anda cismin potansiyel enerjisi U ile kinetik enerjisi K' nın toplamıdır.
1 2 1 2
Potansiyel Enerji: U kx kxm cos2 t
2
2
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
1 2 1
1 k 2
2 2
2
Kinetik Enerji: K mv m xm sin t m xm sin 2 t
2
2
2 m
A
L
1
1
kx cos t sin t kx
Mekanik Enerji: E U P
KO
2
2
A
F
A
Şekilde potansiyel
enerji "yeşil", kinetik enerji "kırmızı" ve mekanik
T
enerji de "U
siySah" çizgi ile gösterilmiştir. U ve K zamanla değişirken,
M
.
E sabittir. Salınım yapan cismin potansiyel ve kinetik enerjileri
R
D
2
m
2
2
arasında dönüşüm olurken, toplamları sabit kalmaktadır.
2
m
(12-7)
Örnek : x -ekseni üzerinde basit titreşim hareketi yapan bir cismin konumu
x (t ) = 4cos(3
4 (3 t + ) if
ifadesi
d i il
ile veriliyor
ili
(t saniye
i ve x cm cinsindendir).
i i d di )
a ) Hareketin frekansını ve periyodunu bulunuz.
M
I
R
b ) Hareketin genliğini ve faz sabitini bulunuz.
c ) Cismin t = 0.25 s anındaki konumunu bulunuz.
a ) 3 2 f 3 f 1.5 hertz
.
R
1 2
T 0.67 s
f
3
A
L
O
P
A
L
Y
LE
I
D
L
YI
D
e
v
T
b ) x(t ) xm cos(t ) xm 4 cm ve
A
F
A
T
1
c ) x(0
(0.25)
25) 4 cos(3 ) 22.83
83 cm
4
S
U
M
.
R
D
(12-8)
Örnek : Yay sabiti 8 N / m olan bir yaya bağlı 0.5 kg kütleli cisim, genliği
10 cm olan basit harmonik hareket yapıyor.
yapıyor
a ) Cismin maksimum hızı ve ivmesi nedir?
M
I
R
I
D
b ) Cisim denge noktasından 6 cm uzakta iken hızı ve ivmesi nedir?
b
L
I
Y
c ) Cisim x = 8 cm' den x = 0' a ne kadar zamanda gider? A
L
Y
k
4 rad/s L
;E
a) x(t ) x cos(t ) ;
x 10 cm
.
m
R
D
v(t ) 40sin(4vt )e v 40 cm/s 0.4 m/s
x(t ) 10 cos(4t )
T
a (t ) 160
cos(4t ) a 160 cm/s 11.66 m/s
A
L
O
cos (0.6)
P
b ) x(t ) 10 cos(4t )A 6 t
0.23
0 23 s
4
F
A
v((0.23)) T
40sin(4
( 0.23)) 32 cm/s 0.32 m/s
S
U
a (0.23)
160 cos(4 0.23) 97 cm/s 0.97 m/s
M
.
R
D
m
m
m
2
m
2
1
2
2
(12-9)
c ) x(t ) 10 cos(4t )
M
I
R
cos 1 (0.8)
0.161 s
x1 8 t1
4
cos 1 (0)
x2 0 t2
0.392 s
4
t t2 t1 0.231 s
A
F
S
U
A
L
O
P
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
A
T
M
.
R
D
(12-10)
Örnek : Yay sabiti 25 N / m olan bir yaya bağlı 1.0 kg kütleli bir cisim x - ekseni
üzerinde basit harmonik hareket yapıyor.
yapıyor Cisim t = 00' da,
da x = 3 cm noktasından
M
I
R
serbest bırakıldığına göre,
I
D
a ) Hareketin periyodu nedir?
a
L
I
Y
b) Cismin konumunu, hızını ve ivmesini zamanın fonksiyonu
olarak bulunuz.
A
L
c ) Cismin maksimum hızı ve ivmesi nedir?
Y
E
L
.
k
25
2
2(3.14)
a)
5 rad/s ;
T
1.256
1 256 s
R
1.0
5
m
TD
e
v
T
b ) x(t ) x cos(t ) t 0 'da
x 3 cm vee v 0 0
A
L
x(t ) 3cos(5t )
O
P
d
dx
A
c ) v 15sin(5t ) 15 cm/s 0.15 m/s
)
v(t )
15sin(5
t
F
A
dt
T
S
dUx dv
a 75cos(5t ) 75 cm/s 0.75 m/s
a (t )
75cos(5t )
M
dt
dt
.
R
D
m
0
m
1
2
2
2
m
2
1
(12-11)
Örnek : Yay sabiti 20 N / m olan bir yaya bağlı 0.5 kg kütleli cisim x - ekseni
üzerinde
ü
i d genliği
liği 3 cm olan
l bbasit
i harmonik
h
ik hareket
h k yapıyor.
a) Sistemin mekanik enerjisini ve cismin maksimum hızını bulunuz.
M
I
R
I
D
L
YI
b ) Cisim denge noktasından 2 cm uzakta iken hızı nedir?
c ) Cisim bu noktadayken kinetik ve potansiyel enerjisi nedir?
A
L
Y
LE
1 2
1
a ) E K U kx m (20)(0.03) 2 9 10 3 J
2
2
.
R
D
e
1
2(9 10
v
x 0 U 0 E mv v
2AT
05
0.5
L
O
P
1
1
2 E kx
b ) E mv kkxA v
00.141
141 m/s
/
2
2F
m
A
T
S
1U
1
c ) K mv (0.5) 0.141 5 10 J
M2
2
.
R
D U E K 9 10 5 10 4 10 J
2
m
2
m
3
)
0.19 m /s
2
2
2
3
2
3
3
3
(12-12)
Örnek : Sürtünmesiz yatay bir yüzeyde bulunan P bloğunun
üzerinde
i d m kütleli
k l li bbaşka
k bir
bi bl
blok
k ( B bl
bloğu)
ğ ) bbulunmaktadır.
l
k d
Blokların temas yüzeylerinde statik sürtünme katsayısı
s = 0.6' dır. P bloğu bir yaya bağlıdır ve f = 1.5 Hz frekansında basit harmonik
M
I
R
A
L
Y
LE
I
D
L
YI
hareket yapmaktadır. B bloğunun P' nin üzerinden kaymaması için, harmonik
hareketin maksimum genliği ne olmalıdır?
.
R
D
e
v
F N mg 0 N mg f T mg ma
A
L
Basit harmonik harekette,PaO x ile verilir.
A
g
F
mg ma A
g a 2 f x x
T
2 f
S
U
x 0.0662
m 6.62 cm
M
.
R
D
B bloğu da P bloğu ile birlikte basit harmonik hareket yapar.
y
s ,m
m
2
s
m
m
2
s
m
s
m
m
m
s
2
m
(12-13)
Örnek : Kütlesi m ve yarıçapı R olan katı bir küre,
5 R yarıçaplı
l silindirik
ili di ik bir
bi yüzeyde
ü
d kaymadan
k
d
yuvarlanarak, düşey eksen etrafında küçük
salınımlar yapıyor. Salınım periyodunun
T 2
28 R
5g
.
R
olduğunu göste
gösteriniz?
riniz?
A
L
Y
LE
θ
4R
M
I
R
I
D
L
YI
D
e
v
T
v 4 RO O : küçük
kü ük kürenin
kü Ai O noktasına
kt
göre
ö açısall hızı
h
L
4O
O
v R : küçük kürenin
P kendi eksenine göre açısal hızı
A
F
1
1
A
E mg 4 R (1 cos
) mv I
T
S
2
2
U
M
.
R
D
U
2
2
bulunur.
K
(12-14)
v 4 RO ve 4O ifadelerini enerji eşitliğinde yerine yazar ve zamana
M
I
R
göre türev alıp sıfıra eşitlersek (enerji korunduğu için zamanla değişmez)
1
1
2
2
2
E mg 4 R(1 cos ) m 4 RO mR 4O
2
5
I
D
L
YI
2
2
küre için I mR
5
A
L
Y
d
d
32
dE
d
4 g sin
16 R
R
0LEsin
5
dt
dt
dt
dt .
R
32
D
4 g 16 R R 0 e
v
5
T
A
L
20 g
5 gO
P 2
112 R
28 R
A
F
A
5g
2T
28 R
S T 2
bulunur.
28 RU T
5g
M
.
R
D
O
O
O
O
O
O
küçük açı
O
(12-15)
Örnek : Kütlesi M olan bir cisim, O noktası etrafında serbestçe dönebilen
L uzunluğunda ağırlıksız bir çubuğa monte edilerek şekildeki gibi fiziksel
bir sarkaç yapılmıştır. Sarkaç, bağlantı noktasından h kadar aşağıdaki bir
M
I
R
I
noktadan da yay sabit k olan bir yaya bağlanmıştır.
bağlanmıştır Sistem bir miktar sola LD
I
Y
çekilip serbest bırakılıyor ve basit harmonik hareket yapıyor. Salınımın
A
L
frekansını bulunuz.
Y
E
L
Enerjinin korunumundan,
.
R
1
1
D
E M gL (1 cos ) M v kx
yazılabilir.
e
2
2
v
T
v L , x h sin ve cos 1 ifadelerini
yukarda yerine yazar
A
L
ve zamana göre türev alırsak, O
P
MgL kh cos A
F
A
ML T
S
bulunur. Küçük
açı cos 1 yaklaşımı ile birlikte,
U
M
.
MgL kh
1
kh
R
D 2 f ML f 2 L gL M elde edilir.
2
2
2
2
2
2
1/2
2
(12-16)
Örnek : Kütlesi m ve uzunluğu L olan ince bir çubuk,
bir ucundan g
geçen
ç mil etrafında serbestçe
ç dönebilmektedir.
Çubuğun diğer ucu da yay sabiti k olan bir yaya bağlanmıştır.
Çubuğun sağ ucu şekildeki gibi küçük bir açısı kadar
kaldırılıp serbest bırakılıyor ve sistem basit salınım hareketi
yapıyor Salınımın periyodunu bulunuz.
yapıyor.
bulunuz
Enerjinin korunumundan,
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
2
1
1
1
11
1
1
v
E kx 2 I 2 kx 2 mL2 kx 2 mv 2
2
2
2
23
2
6
L
yazılabilir.
A
L
O
Ptürevini alır sıfıra eşitlersek,
Her iki tarafın zamana göre
eşitlersek
A
F 3k
1
A
kxv mva 0 Ta x bulunur.
S
3
m
U
M
m
2
3k
.
T 2
Buradan da periyoda geçersek,
R
T
m
3k
D
elde edilir.
(12-17)
Burulma Sarkacı :
Eylemsizlik
E
l i lik momentii I olan
l disk,
di k bi
bir tell ile
il asılmış
l
ve ekseni
kIM i
R
I
etrafında salınım yapmaktadır. Diskin açısal yer-değiştirmesi
D
L
I
olduğunda telin diske uyguladığı geri çağırıcı
Y tork
ABurada telin
olur. Bu,, Hooke yyasasının açısal
ç formudur.
L
Y
E
burulma sabitidir.
L
.
R
D
ile F C x ifadelerini karşılaştırırsak,
C buluruz.
e
v
Kütlenin de dönmede eylemsizlik
y
momentine
karşılık
ş
geldiğini
g
ğ
T
A ve periyodu,
L
hatırlarsak, salınımın açısal frekansı
O
P
A
C
I
I
F
;
T 2
2
A
I
I T
C
S
olarak bulunur.
Burada I, diskin tele göre eylemsizlik momentidir.
U
M
Açısal. yer-değiştirme de (t ) cos t ifadesine sahiptir.
R
D
m
(12-18)
Basit Sarkaç :
Sabit bir noktaya bağlı L uzunluğundaki ip ile ipin ucuna bağlı
M
I
m noktasal cisminden oluşur. Kütle denge konumundan
Rbir
I
D
miktar uzaklaştırılıp serbest bırakılırsa
bırakılırsa, basit harmonik
hareket
L
I
Y
yapacaktır.
A
L
Bi i yerçekimi,
Biri
ki i diğeri
diğ i de
d iipteki
ki gerilme
il Y olmak
l k üzere,
ü
cisme
i
E
L
etkiyen iki kuvvet vardır. Bu kuvvetlerin
oluşturduğu net
.
t k r F Lmg
tork
L sin
iDR
' dır.
d Burada
B d , radyan
d
cinsindendir
i i d di
eyaptığı açıdır. 1 ( <10) durumunda,
ve ipin düşey eksenle
v
T
sin yaklaşımı
yapılabilir ve Lmg bulunur.
A
L
O
Bunu P
Bunu,
F C x ile karşılaştırırsak
karşılaştırırsak, C Lmg buluruz.
buluruz Kütlenin
A
F
S
U
M
C
.
R
D I
g
de dönmede eylemsizlik momentine karşılık geldiğini hatırlarsak,
A
T
mgL
I
olarak bulunur.
salınımın açısal frekansı ve periyodu
periyodu
;
I
I
mL2
L
T 2
2
2
2
C
mgL
L
mgL
L
g
(12-19)
Küçük-açı yaklaşımında, 1 ve dolayısıyla sin
k b ll
kabullenmesini
i i yaptık.
tk
“küçük”
küçük açı? Neye göre? Nasıl karar vereceğiz?
I
D
L
YI
A
L
(radyan)
(
)
sin
i EY
L
.
0 087
0.087
0R087
0.087
D
e 0.174
v
0.174
T
A
0.262L
0.259 (~% 1’lik fark)
O
P
0 349
0.349
0 342 ((~%
0.342
% 2’lik fark)
f k)
A
F
(derece)
(
)
5
10
15
20
M
I
R
A
T
S
Sonuç: U
10o
M
.
R
D
durumunda, küçük-açı yaklaşımını kullanabiliriz.
(12-20)
Fiziksel Sarkaç :
Bir O noktasından asılmış ve yerçekimi etkisiyle bu nokta
etrafında salınım yapan katı cisimdir. Cisme etkiyen net tork,
mgh sin ifadesine sahiptir. Burada h, katı cismin kütle
merkezi ile O noktası arasındaki mesafedir.
M
I
R
I
D
L
YI
A
L
Y
Küçük-açı yaklaşımı ( 10) yaparsak,
net tork
E
L
.
mgh olur.
R
D
Bunu, F C x ile e
karşılaştırırsak
C mgh buluruz.
v
T i karşılık
K l i dde dönmede
Kütlenin
d
d eylemsizlik
l
i likAmomentine
k l k geldiğini
ldiği i hhatırlarsak,
l
k
L
O
salınımın açısal frekansı ve
periyodu
P
A
C
mgh F
I
I
A
; T 2
2
T
I
I
C
mgh
S
U
Burada I M
, katı cismin O noktasından geçen eksene göre dönme eylemsizlik
.
R
momentidir(
D idi (I I mhh ).)
2
km
(12-21)
Örnek : Kütlesi M ve uzunluğu L olan ince bir çubuk, bir ucundan geçen
M
I
R
mil
il etrafında
t f d serbestçe
b t dönebilmektedir.
dö bil kt di Küçük
Kü ük salınımlar
l
l için
i i hareketin
h k ti
I
D
L
YI
periyodunu bulunuz.
I. Yol :
Enerjinin korunumundan,
A
L
L
L
1
1 E1Y
E Mg (1 cos ) I Mg (1 cos ) L ML
2
2
2
23
.
R
yazılabilir.
D
e
v
Her iki tarafın zamana göre türevini T
alır sıfıra eşitlersek;
A
L
L
1
3g
2
3g
O
Mg sin
ML 0
T 2
P
2
3
2L
T
2L
A
F
II. Yol :
A
T L
S
U
Mg sin
3g
2
3g
M
2
.
I
T 2
R
1
2L
T
2L
D
ML
3
2
2
2
2
2
2L
3g
2L
3g
(12-22)
Basit Harmonik Hareket ve
Düzgün Dairesel Hareket :
Bir cismin, yarıçapı xm olan çembersel
M
I
R
I
D
L
bi yörünge
bir
öü
üüzerinde
i d sabit
bit bi
bir v hhızıyla
lI
Y
A
hareket ettiğini düşünelim.
L
Y
E x-ekseni
P noktasında bulunan cismin
L
.
üzerindeki izdüşümü R
P noktasıdır.
noktasıdır Bu
D
e da
noktanın koordinatı
v
T
x(t ) x A
cos t
L
O
olacaktır.
P
A
F
m
S
U
D
M
.
R
A
T
P noktası çembersel yörünge üzerinde
d
düzgün
ddairesel
i
l hareket
h k yaparken,
k
izdüşümü olan P ise x-ekseni üzerinde
basit harmonik hareket yapacaktır.
(12-23)
P noktasının v hızı, xm çarpımına eşit ve IM
R
I
ççembere her noktada teğettir.
ğ
v hızının D
L
I
Y
x-ekseni üzerindeki izdüşümü:
A
L
v(t ) x sin
i t if
ifadesine
dYi sahiptir.
hi ti
E
L
.
R
D
e
v
İvme a ise, her
noktada çemberin merkezi olan O
T
A
L
noktasına
doğrudur ve x-ekseni üzerindeki izdüşümü
O
P
a
(
t
) x cos t ifadesine sahiptir.
sahiptir
A
AF
m
2
m
T
S
U
M
.
R
Sonuç : İster yer-değiştirmeye, ister hıza, isterse de ivmeye bakalım, düzgün dairesel
h k t yapan bi
hareket
bir cismin
i i x-ekseni
k i üüzerindeki
i d ki izdüşümü
i dü ü ü basit
b it harmonik
h
ik hareket
h k t yapar.
D
(12-24)
Örnek : Bir cisim 3 m yarıçaplı bir çember etrafında 8 rad / s sabit açısal hızla dönmektedir.
t = 0 anında cismin x koordinatı 2 m noktasıdır ve sağa doğru hareket etmektedir
etmektedir. Cismin x
koordinatını, çizgisel hızının ve ivmesinin x bileşenlerini bulunuz.
8 rad/s ve xm 3 m olarak verilmiştir. Buna göre,
x (t ) xm cos( t ) 3 cos(8t )
LA
t 0 ' da, x 2 m olduğuna göre,
1 2
2 3cos( ) cos ( ) 48.2o ve
3
T
.
R
M
I
R
I
D
L
YI
Y
LE
D
A
L
dx
Cisim t 0 anında sağa doğruO
hareket ettiği için,
0
P
dt
A
Fde, 48.2 0.841 rad alınmalıdır.
olmalıdır. Bu nedenle
A
T
S
U
vx 24sin(8t 0.841)
M
x(t ) . 3cos(8t 0.841)
R
0 841)
ax 192 cos(8t 0.841)
D
t 0
o
(12-25)
GENEL FİZİK II
DERS NOTLARI
Hazırlayanlar:
Prof. Dr. Mustafa POLAT
Prof Dr
Prof.
Dr. Leyla TATAR YILDIRIM
2012
BÖLÜM-21
BÖLÜM
21
Elektrik Yükü
A
L
Y
LE
M
I
R
I
D
L
YI
Bu bölümde, maddenin özelliklerinden birisi olan “elektrik yükü” ile
tanışacağız.
.
R
D
e
v
T
Atomu meydana
At
d
getiren
ti
elektron,
l kt
proton
t
ve nötron’
öt ’ nun yüklerini
ükl i i
öğreneceğiz ve devamında da şu konulara değineceğiz:
A
L
• Elektrik yükünün çeşitleri
O
P ((Coulomb yyasası))
• İki y
yük arasındaki kuvvet
• Yükün kuantalığı FA
A
• Yükün korunumu
T
S
U
M
.
R
D
(21-1)
Bir kumaş parçası ile ovuşturulan kehribarın tüy gibi
hafif nesneleri çektiği antik çağlardan beri bilinen bir
şeydir. Bu olgu, maddenin yeni bir özelliği olan
“elektrik
elektrik yükü
yükü” ile ilgilidir.
ilgilidir Birçok deney,
deney iki tür
elektrik yükünün varlığını göstermiştir: pozitif (renk
kodu: kırmızı) ve negatif (renk kodu: siyah). “pozitif”
pozitif
ve “negatif” isimleri Benjamin Franklin tarafından
verilmiş isimlerdir.
M
I
R
.
R
S
U
M
.
R
A
L
Y
LE
I
D
L
YI
D
Cam bir çubuğu v
ipek
e bir kumaşla ovuşturduğumuzda,
ikisi de elektrik
yükü kazanır. Cam çubuğun kazandığı
T
Apozitif olarak tanımlanır.
yükün işareti
L
O
P şekilde,
Benzer
şekilde plastik bir çubuğu bir kürk ile
A
F
ovuşturduğumuzda,
ikisi de elektrik yükü kazanır.
A
T Plastik ççubuğun
ğ kazandığı
ğ y
yükün işareti
ş
negatif
g
olarak
tanımlanır.
D
(21-2)
Yüklü cisimlerle yapılan bir çok deneysel çalışmalardan
elde edilen sonuçlar şu şekilde özetlenebilir:
M
I
R
S
U
M
.
R
I
D
1. Aynı işaretli yükler (her ikisi de pozitif veya
negatif)
L
birbirlerini iterler (Şekil-a).
YI
A
L
2 İşaretleri farklı olan yüklerY(biri pozitif,
2.
pozitif diğeri
E(Şekil-b).
negatif) birbirlerini çekerler
L
.
R
D
Yükünün işareti bilinen
bir cisimle, yükünün işareti
e
v
bilinmeyen cisim
arasındaki etkileşme kuvvetinin
T
A
yönünden Lyararlanarak,
bilinmeyen cismin yükünün
işaretiniO
P belirleyebiliriz.
A
FAynı işaretli yükler birbirini iter.
A
T
Zıt işaretli yükler birbirini çeker.
D
(21-3)
M
I
R
Yö t
Yöntem:
I
D
L
YI
İpek bir kumaşla ovuşturulan cam çubuğun pozitif
yüklü olduğunu biliyoruz. Bu çubuğu, yükü
kaybolmayacak ve etrafında serbestçe dönebilecek
şekilde
kild ortasından
d
asalım.
l
S
Sonra
d
da,
yükünü
ükü ü
bilmediğimiz bir cismi cam çubuğa doğru
yaklaştıralım.
yaklaştıralım
.
R
A
L
Y
LE
D
edurum söz konusudur:
v
Mümkün olan iki
T
Şekil- L
a:Aİki cisim birbirini iter. Bu
O
bilinmeyen
yük pozitif işaretlidir.
P
A
F Şekil-b: İki cisim birbirini çeker. Bu
S
U
A
T
durumda
durumda
bilinmeyen
y y
yük negatif
g
işaretlidir.
ş
M
.
R
D
(21-4)
Benjamin Franklin zamanında (18. yy) elektrik
yükünün bir çeşit ağırlıksız,
ağırlıksız sürekli akışkan
olduğu kabul ediliyordu. 20. yy başlarında Ernest
Rutherford’ un atomun y
yapısı
p üzerinde y
yürüttüğü
ğ
araştırmalar, maddenin ne şekilde meydana
geldiğini ortaya koydu ve bileşenlerinin sahip
oldukları yüklerin belirlenmesini sağladı.
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
Atomlar elektronlardan ve çekirdekten oluşur.
Çekirdeğin kendisi de, proton ve nötronlardan
oluşur.
D
e
v
T
A
L
Atomun çapı
510-10 m.O
-15P
Çekirdeğin çapı 510
m
m.
A
F
A
Elektronlar negatif
yüklü, protonlar pozitif yüklü, nötronlar ise yüksüzdür.
T
S
Bu durumdaUelektrik yükü, atomu oluşturan parçacıkların (elektron, proton,
M
.
nötron)
temel bir özelliğidir.
R
D
(21-5)
Atomik Bileşenlerin Kütleleri ve Yükleri:
Nötron (n) :
Proton (p) :
Elektron (e) :
M
I
R
I
D
L
YI
Kütle m = 1.67510-27 kg; Yük q = 0
27 kg; Yük q = +1.60210
19 C
Kütle m = 1.67310
1 67310-27
+1 60210-19
Kütle m = 9.1110-31 kg; Yük q = -1.60210-19 C
A
L
Y
N 1 Elektron
Not-1:
El k
ve protonun yükleri
ükl i için,
i i sırasıyla,
l “-e”
“ ” ve “+e”
“ ”
E
L .
sembolleri kullanılır. Bunlar temel yük olarak bilinirler
.
R
D
Not-2: Bir atomdaki elektron ve proton sayıları
eşitse, atom elektriksel
e“atom numarası (Z)” dır.
v
olarak “nötr” olarak adlandırılır. Bu sayı
T
Ave nötron sayılarının toplamı ise
Not-3: Bir atomdaki proton
L
“kütle numarası (A)” dır.PO
A
Gösterim: 235 AF
Z = 92 = elektron/proton sayısı
U
92T
S
A = 235 =proton
t + nötron
öt
sayısı
U
M
.
R
D
(21-6)
Yükün Quantalanması :
M
I
R
I
Bir nesnenin toplam yükü, o nesnedeki temel parçacıkların sayısına
D
L
I
Y
(elektron, proton, nötron) bağlıdır. Elektron sayısı Ne , proton sayısı
A
L
N ve nötron sayısı N olan bir nesnenin net yükü,
yükü Y
E
L
.
Q eN eN 0N e N N ne
R
D
e Bu, net yükün elektron
olur. Burada, n N N ve tamsayıdır.
v
T
A
yükünün tamsayı katları kadarLolacağını
gösterir. Yani yük quantalıdır.
O
P
A
F
A
N
T
S
N
U
N
M
.
R
D
p
n
net
e
p
n
p
p
e
e
p
e
n
(21-7)
Yükün Korunumu:
M
I
Rbir
Her ikisi de yüksüz olan cam bir çubuk ile ipek
I
kumaşımız olsun.
olsun Cam çubuğu ipekILD
kumaşla
Y yüklenir.
ovuşturduğumuzda, cam çubuk pozitif
A şekilde, ipek
L
Aynı anda, toplam yük sıfır olacak
Y
E olarak yüklenir.
kumaş da eşit miktarda L
negatif
.
Buradan, ovuşturma R
işleminin
herhangi bir yük
D
oluşturmadığı ancak,
birinden diğerine yük akışı
e Yükün korunumu şöyle
v
sağladığı anlaşılır.
T
ö tl bili
özetlenebilir:
“H h i bir
“Herhangi
bi işlemin
i l i öncesindeki
ö
i d ki
A
L
toplam
yük,
işlemden sonraki toplam yüke eşittir”.
O
P
A
AF Önceki Net Yük = Sonraki Net Yük
T
S
U
M
.
R
Qi Q
f
D
(21-8)
M
I
R
İletkenler ve Yalıtkanlar :
I
D
L
YI
A
L
Y
Ebazılarıdır.
malzemelerdir. Bakır, aliminyum, civa bunlardan
L
.
Raşmalarına izin vermeyen
Yalıtkanla yüklerin içlerinde serbestçeDdol
Yalıtkanla,
e bunlardan bazılarıdır.
malzemelerdir. Plastik, lastik, cam, vseramik
T
İletkenlerde, atomun son yörüngesindeki
bir veya daha fazla elektron
A
L
O hale gelebilir ve iletken içinde hareket
kolayca atomdan ayrılıp P
serbest
A
eder. Bunlara iletimFelektronları
diyoruz. İletim elektronları geride
A
y dediğimiz
ğ ST
pozitif
p
yüklü
y
atomlar bırakırlar. İletkenin içinde
ç
sadece
iyon
U
iletim elektronları
serbestçe hareket edebilir, pozitif yüklü iyonların
M
.
R
konumları
değişmez.
değişmez Yalıtkanlar ise iletim elektronu içermezler.
içermezler
D
İletkenler, yüklerin içlerinde serbestçe dolaşabilmelerine izin veren
(21-9)
Bir İletkeni İndüksiyon
y Yoluyla
y Yüklemek :
M
I
R
Şekil-a' da bir iletken yaltkan bir iple asılmıştır ve başlangıçta
I
D
yüksüzdür.
yü
sü dü . Negatif
Negat yü
yüklü
ü pplastik
ast çubuğu yavaşça yaklaştıralım.
ya
aşt a .
L
I
Y
Plastik yalıtkandır ve üzerindeki negatif yükler hareketsizdir.
A
L
Ancak, iletken içindeki negatif yükleri sağ
uca doğru itecektir.
Y
E meydana geldinden pozitif
İletkenin sol ucunda elektron boşluğu
L
.
yüklenmiş olacaktır
olacaktır. ŞekilŞekil bR
'de
de toprağa bağlı bir iletim yolu
D
oluşturulmuş, böylecee
elektronların toprağa akması sağlanmıştır.
v
Toprak bağlantısını
iptal eder ve plastik çubuğu uzaklaştırırsak,
uzaklaştırırsak
T
A
L
iletken çubuk pozitif yüklenmiş olacaktır.
O
P İletkenhe üzerinde indüklenen yük,
Not -1:
yük plastik çubuğun
A
F yükü ile ters işaretlidir.
S
U
A
T
Not - 2 : Plastik çubuk aynı amaçlı çok defa kullanılabilir.
kullanılabilir
M
.
R
D
(21-10)
Coulomb Yasası :
M
I
R
Aralarındaki mesafe r olan, q1 ve q2 yükleri olsun. Bu yükler
I
D
L
1. Kuvvetler, yükleri birleştiren doğru boyuncadır.
YI
2. Yükler aynı işaretliyse, kuvvet iticidir.A
L
Y
Yükler zıt işaretliyse, kuvvet çekicidir.
E
L
3. Kuvvetin büyüklüğü, Coulomb
Yasası olarak bilinen
.
R
q q
1
D
olmak e
üzere, F k
eşitliği ile verilir.
k
4
r
v
B d , boşluğun
Burada
bAT
l ğ veya havanın
h
elektriksel
l kt ik l geçirgenliği
i
liği
L
olarak O
bilinir ve değeri 8.85 10 N m /C dir.
P
A
F
birbirlerine, aşağıda özellikleri verilen kuvvetler uygularlar.
q1 q2
F k
r2
1
2
2
0
0
-12
2
2
m1m2
F G 2
r TA Coulomb kuvveti ve Newton'un gravitasyonel kuvveti aynı
S
U
D
M
.
R
formdadır. Tek fark
formdadır
fark, gravitasyonel kuvveti her zaman çekici
bir kuvvettir. Buna karşın Coulomb kuvveti, yüklerin işaretine
bağlı olarak çekici veya itici olabilir
olabilir.
(21-11)
Örnek : Hidrojen atomunda çekirdekteki proton ile yörüngedeki elektron arasındaki
M
I
R
uzaklık ortalama 5.3 1011 m' dir. Bunlar arasındaki elektriksel ve gravitasyonel
kuvvetlerin büyüklüklerini bulunuz.
I
D
L
I
Y
Coulomb yasasından, bu iki yük arasındaki kuvvetin büyüklüğü:
A
L
Y
1.6 10
e
F k
9 10
8.2 10 N. LE
r
.
5.3 10
R
D
İki kütle arasındaki çekim kuvvetinin büyüklüğü,
Newton' un gravitasyon
e
v
yyasasından:
T
A
L
9.11 10 1.67 10
mm
O
F G
6.7 10
3.6 10
N.
P
r
5 3 10
5.3
A
F
A
Atomik boyutta, T
parçacıklar arasındaki kütle çekim kuvveti önemsenmeyecek
S
düzeyde küçüktür.
U
M
.
R
D
19 2
2
E
8
9
11 2
2
31
g
e
p
2
27
11
47
11 2
(21-12)
Coulomb Yasası ve Üstüste Binme İlkesi :
Bir yük
Bi
ük grubunun
b
bbelirli
li li bi
bir yüke
ük uyguladığı
l d ğ nett kuvvet,
k IMt
R
I
tüm yüklerin uyguladığı kuvvetlerin vektörel toplamına
D
L
eşittir.
YI
A
L
Y
Ö
Örneğin,
q ve q yükleri tarafından q yüküne uygulanan
net kuvvet (F ),
E
L
.
F F F
R
D
ile verilir. Burada, F ve F sırasıyla qe ve q yüklerinin q yüküne
v
uyguladığı kuvvetlerdir
kuvvetlerdir. q yüküneT
etkiyen n tane nokta yük olması
A
L
durumunda ise net kuvvet, O
P
A
F F F F ...
F F
F
A
T
S
il ifade
ile
if d edilir.
dili
U
M
.
F F F
R
D
2
1
21
3
1
1
31
21
31
2
3
1
1
n
1
21
31
41
n1
i2
i1
1
12
14
(21-13)
Örnek : Şekildeki gibi üç nokta yük, dik kenarlarının
M
I
R
uzunluğu a = 10 cm olan ikizkenar üçgenin köşelerine
I
D
L
YI
yerleştirilmiştir. q1 = q3 = 5 C ve q2 = 2 C olduğuna
göre q3 yüküne etkiyen net kuvveti bulunuz.
A
L
Coulomb yasasından
yasasından, q ve q yüklerinin q yüküne uyguladıkları
kuvvetlerin
Y
E
L
büyüklükleri:
.
R
5 10 5 10 D
q q
e 11 N
9 10
F k
v
2 0.1T
2a
A
L
2 10O 5 10
q q
P
F k
9 10
9 N
A
a
0.1
F
A
F F F S
T
(11cos 45 9)iˆ 11sin 45 ˆj 1.1i
1 1iˆ 77.9
9ˆj N
U
M
7.9
.
Fnet 1.1 7.9 8 N ; tan
=98
R
1 1
1.1
D
1
2
3
6
1
3
13
6
9
2
2
6
2
23
net
3
9
2
2
13
6
23
2
2
1
o
(21-14)
Örnek : Şekildeki gibi üç nokta yük, x -ekseni üzerine
yerleştirilmiştir q1 = 15 C
yerleştirilmiştir.
C'luk
luk yük x = 2 m noktasında,
noktasında
q2 = 6 C'luk yük ise orijinde bulunmaktadır. q3 nokta
yükü x -eksini
eksini üzerinde hangi noktada olmalıdırki,
ırki üzerine
etkiyen net kuvvet sıfır olsun?
M
I
R
I
D
L
YI
A
L
Y
q ve q yükleri aynı işaretli olduğu için, işareti ne olursa
olsun q
E
L
.
bunların arasına konulmalıdır. Bu durumda:
R
D
q q
q q
e
; F k
F k
v
x
2 x
T
A
L
q
qO
F F
P
3x 8 x 8 0
2 x A x
F
A
x 0.775 m T
S
bulunur. U
M
.
R
D
1
2
3
1
13
3
2
23
2
1
13
23
2
yükü
3
2
2
2
2
(21-15)
Örnek : Aynı noktadan asılmış, kütleleri 3 102 kg olan
yüklü iki özdeş küre şekildeki gibi dengededirler. İplerin
İ
boyu 15 cm ve = 5o olduğuna göre, kürelerin yükü nedir?
M
I
R
I
D
L
YI
A
L
Denge durumunda yükler arasındaki uzaklık: a LsinYolacaktır.
olacaktır Küreler
E
L
dengede olduğuna göre:
.
R
q
D
T sin k
; T cos mg
e
v
2
a
T
A
q
L
k
O
a
mg
2
g
tan 2a
P
t
tan
q A
19.54
19 54 10
mg
k
F
A
q 4.42
4 42 10 SCT
U
bulunur. M
.
R
D
2
2
2
2
2
2
16
8
(21-16)
Örnek : Kütleleri m, yükleri de q1 = Q ve q2 = 2Q olan
iki parçacık L uzunluğundaki iplerle aynı noktadan düşey
olarak asılı halde dengededirler. Yükleri asılı oldukları
M
I
R
I
D
noktaya bağlayan iplerin düşeyle yaptıkları ve açıları
L
I
Y
çok küçüktür. Bu iki açı arasındaki ilişkiyi ve yükler arasındaki mesafeyi bulunuz.
A
L
Y
T sin F
F E
q yükü için
tan . L
T cos mgg
mgg
R
D
T sin F
F
e
tan
q yükü için
v
mgg
T cos mg
T
A
L
r L sin
r
O
L sin 2 L tan tan
r 2P
r L sin
2L
A
F
A
4kQ L
2Q
r
T
F mg tan S k
mg
r
r
mg
2L
U
M
.
bulunur.
R
D
1
1
2
E
1
1
1
1
E
1
1
2
E
2
2
2
2
1
1
1
1
2
2
E
E
2
1
2
2
1
2
1/3
2
(21-17)
Örnek : Yükleri + q olan iki özdeş parçacık, aralarındaki mesafe d olacak
şekilde y -ekseni
ekseni üzerinde sabitlenmişlerdir
sabitlenmişlerdir. Yükü Q ve kütlesi m olan
üçüncü bir parçacık ise, iki yükün ortasından dik olarak geçen eksen
M
I
R
I
üzerinde merkezden x kadar uzaktaki bir noktaya konuyor.
üzerinde,
konuyor Q yükü ILD
bu eksen üzerinde rahatça hareket edebilmektedir. x d durmunda, Y
Q
A
L
yükünün basit harmonik hareket yapacağını gösteriniz.
gösteriniz Hareketin
Hareket
in periyodunu bulunuz
bulunuz.
Y
E
L
.
Basit harmonik hareket yapan bir cisim için
için, F Cx
olmalıdır ( C )).
R
D
e qQ sin 2kqQx
Q yüküne etkiyen geri çağırıcı kuvvet: F v2k
x (d / 2)
T
x (d / 2)
A
L
2kqQx O
16kqQ
xd F
P
x
d
(d / 2) 1 A
(2 x / d )
F
A
T
d
S
2 / T T 2
U
16kqQ
M
.
R
D
2
2 3/2
3
2
2
2 3/2
3
3
(21-18)
Örnek : Yükleri + q olan dört özdeş parçacık, xy -düzleminde
b l
bulunan,
kenar
k
uzunluğu
l ğ L olan
l bir
bi karenin
k
i köşelerine
kö l i şekildeki
kild ki
gibi sabitlenmişlerdir. Q yüküne sahip başka bir parçacık ise,
k
karenin
i merkezinden
k i d dik olarak
l k geçen z -ekseni
k i üüzerinde,
i d kkare
merkezinden z kadar uzaktaki bir noktaya konuluyor. Q yükü
üzerine etkiyen net kuvveti bulunuz.
bulunuz
.
R
A
L
Y
LE
I
D
L
YI
+q yüklerinden birisinin Q yüküne uyguladığı çekici kuvvet: F k
a L / 2 L / 2 L / 2
2
2
cos
2
2
z
z 2 a2
Fnet 4 F cos Fnet
A
F
bulunur.
S
U
A
T
A
L
O
P4kqQz
k Q
z
2
a
2 3/2
D
e
v
T
M
I
R
qQ
z 2 a2
kˆ
M
.
R
D
(21-19)
BÖLÜM-22
BÖLÜM
22
Elektrik Alanlar
M
I
R
I
D
L
I
Bu bölümde durgun yüklerin oluşturduğu elektrik alan
Y ( E ) kavramıyla
A yükler arasındaki
tanışacağız. Yüklerin durgun olması halinde,
L
Y
etkileşmeleri belirlemek için Coulomb yasası
yeterlidir. Yükler durgun
E
olmasaydı,
l
d bu
b etkileşmeleri
kil
l i belirlemek
b li l
k için
i i. L
b k alternatif
başka
l
if yollar
ll bulmak
b l k
R
gerekirdi. Bu konu kapsamında şu konulara
değinilecektir:
D
e
v
T
• Nokta yükün oluşturduğu elektrik
alanın bulunması
A
L
• Nokta y
yük g
gruplarının
p
ve sürekli y
yük dağılımlarının
ğ
oluşturduğu
ş
ğ
O
P
elektrik alanların bulunması
A yüke etkiyen kuvvetin bulunması
• Elektrik alanF
içindeki
A kavramını öğrenmek. Düzgün elektrik alan içindeki
• “elektrik T
dipol”
S
dipole
etkiyen kuvveti, bu kuvvetin oluşturduğu torku ve dipolün
U
Mt i l enerjisini
potansiyel
ji i i belirlemek.
b li l
k
.
R
D
(22-1)
Aralarında r mesafesi olan q1 ve q2 nokta yükleri arasındaki etkileşme
kuvveti Coulomb yasasına göre,
M
I
R
I
1 q q LDq q
I
F
k
4
r Y
r
A
L
Y
bağıntısına
bağ
t s a sa
sahiptir.
pt . No
Nokta
ta yü
yükler
e aarasında
as da L
herhangi
eE a g b
bir te
temas
as o
olmadığı
ad ğ
.
halde, yüklerin birbirlerine kuvvet uygulamalarını
nasıl açıklayabiliriz? q1
R
D
yükü, yakınlarında q2 yükünün bulunduğunu
nerden biliyor? Bu nokta
e
v
ancak, yeni bir kavram olan “elektrik
alan” vektörü ile aydınlatılabilir. q1
T
A kuvvet uygulamaz. Bunun yerine, q2’ nin
nokta yükü q2 üzerine doğrudan
L
b l d ğ noktada
bulunduğu
kt d bir
bi elektrik
l kt ik alan
l oluşturur
l t
ve kuvveti
k
ti bu
b alan
l uygular.
l
PO
A
F
q yükü A
Ele
E
lektrik Alan ( E ) E , q üzerine F kuvveti uygular
1
2
T
S
U
M
.
R
D
1
2
2
1
2
2
0
(22-2)
Elektrik Alan Vektörünün Tanımı :
Yandaki pozitif yüklü çubuğu ele alalım. Çubuğu
M
I
ççevreleyen
y uzaydaki
y
tüm P noktalarında R
elektrik
I
D
L
alan vektörü (E ) şöyle bulunur:
I
Y
1 P noktasına
1.
kt
pozitif
itif bir
bi q0 test
tA t yükü
ükü ko
k nur.
L
Y
2. Yüklü çubuğun q0 testEyüküne uyguladığı F
F
E
q0
U
M
.
R
D
A
T
S
L
.
kuvveti ölçülür.R
D
e elektrik alan vektörü:
3 . P noktasındaki
v
T
F
A
L
E
((N/C))
PO q
A
ğ ggibi E ile F aynı
y yöndedir.
y
F Görüldüğü
0
Not : q0 test yükü, çubuktaki yük dağılımını
değiştirmeyecek kadar küçüktür.
küçüktür
(22-3)
Nokta Yükün Elektrik Alan :
Şekildeki q pozitif yükünü ele alalım.
Yükt r kkadar
Yükten
d uzaktaki
kt ki q0 ttestt yüküne
ükü
etkiyen
y kuvvet ve q0 ' ın bulunduğu
ğ
noktadaki elektrik alan:
q q0
F k
r2
.
R
D
e
A
L
Y
LE
I
D
L
I
Y
M
I
R
v
T
q q0 LA q
F
E
k
k 2
2 O
q0
q0 r P
r
FA
ile verilir.
erilirTA
E , q yükünden
ükünden dışarı doğr
doğrudur.
d r q nokta yükü
ükü
S
U
negatif
M olsaydı E , q yüke doğru olurdu.
.
R
D
(22-4)
I
D
L
I
Y
M
I
R
A
L
Nokta Yük Grubunun Oluşturduğu Elektrik
Alan:
Y
E
L
Bi nokta
Bir
kt yük
ük grubunun
b
oluşturduğu
l t d ğ nett elektrik
l kt ik alan
l E, herbir
h bi yükün
ükü
.
R
D
oluşturduğu elektrik alanların vektörel
toplamına eşittir.
e
v
T
Yukarıda verilen nokta yükA
grubunun
orijinde oluşturduğu elektrik alan,
L
O
E E1 E2 E3
P
A
F
olur. Burada EA
y , q1, q2 ve q3 yüklerinin
y
orijinde
j
1 , E2 ve E3 sırasıyla,
T
S
oluşturdukları
elektrik alan vektörleridir.
U
M
.
R
D
(22-5)
Örnek : Şekilde gösterildiği gibi, q1 = 7.0 C' luk bir yük
orijinde ve q2 = 5.0 C' luk diğer bir yük ise x = 0.3 m
noktasındadır. Koordinatları (0;0.4) olan P noktasındaki
elektrik alanını bulunuz.
I
D
L
I
Y
q1 ve q2 yüklerinin P noktasında oluşturdukları
M
I
R
A
L
elektrik alanların büyüklükleri, sırasıyla,
Y
E
L
q
q.
E k
3.9 10 N / C ; E k R 1.8 10 N / C
D
r
r
e
v
değerlerine sahiptir. BuradanTda P noktasındaki net elektrik alan,
A ˆ
L
ˆj
E E E 1.8
1 8 10
cos
i
3
3.9
9
10
1.8
1
8
10
sin
PO
A E 1.08 10 ˆi + 2.46 10 ˆj N / C
F
sin 0.8
0 8 A
T
2.46 10
S
cos 0.6
) 66.3
tan (
U
1.08 10
M
.
bulunur.
R
D
1
2
1P
1
2
2
2P
5
2
5
1
5
5
5
2
5
1
5
5
o
5
(22-6)
Örnek : Dört adet nokta yük, şekilde gösterildiği gibi,
kenar uzunluğu a olan bir karenin köşelerine konmuştur.
konmuştur
Sağ üst köşedeki q yükünün bulunduğu noktada, diğer
yükler tarafından oluşturulan elektrik alanını ve q yüküne
etki eden kuvveti bulunuz.
A
2 q, 3q ve 3q yüklerinin, q yükünün bulunduğuLnoktada
oluşturdukları
Y
y
, sırasıyla,
y , LE
elektrik alanların büyüklükleri,
.
R
2q
3q
4q
D
E 2 q k 2 ; E3 q k 2 ; E 4 q k 2
e a
a
2a
v
T
ifadelerine sahiptir. İlgi duyulan
noktadaki net elektrik alan :
A
L
O kq
k
3
k
3
ˆ kq
P
E E 2 q E3 q E 4 q 2 2 cos 45 i 2 4 cos 45 ˆj
A a 2
2
a
F
5
kq TA
5.06
10
o
)
58.8
E 2S3.06iˆ + 5.06ˆj ; tan 1 (
U
3.06 10 5
a
M
.
Rbulunur.
D
I
D
L
I
Y
M
I
R
(22-7)
Örnek : Yükü q ve kütlesi m olan bir parçacık,
şekilde gösterildiği gibi, + x-ekseni yönünde
yönelmiş düzgün bir E elektrik alanı içinde ilk
I
D
L
I
Y
M
I
R
hızsız serbest bırakılıyor. Cismin hareketini
A
L
tanımlayınız. (Yer-çekimi kuvvetini ihmal
Y ediniz).
qE
ma x qE a x
m ve
T
xi 0 ve vi 0 olduğundan,
A
E
L
.
R
D
L
O
1
qE 2
qE
2
P
xs a x t
t ; vs a x t
t
A
2
2m
m
F
A
W = F T x K K s qEx
S
U
bulunur.
M
.
R
D
(22-8)
Örnek : Bir proton, elektrik alanının E = 6 105ˆi olduğu bir bölgeye
+x - ekseni yönünde fırlatılıyor. Proton duruncaya kadar elektrik alan
M
I
içinde 7 cm yol alıyor. Protonun ivmesini, ilk hızını ve ne kadar
R sürede
I
D
durduğunu bulunuz. (Yer-çekimi kuvvetini ihmal ediniz).
IL
Y
A
L
ma qE
Y
E
L
.
qE 1.6 1016
5ˆ
16 ˆ
2
R
a
=
(
6
10
i)
=
5.75
10
i
m
/
s
27
D
m 1.67 10
e
v
vs2 vi2 2a x 0 vi2 A
2 T5.75 1016 0.07 vi 9 107 m / s
L
O
vi P 9 107
9
1.57
10
=1.57 ns
vs vi axt t A
16
F ax 5.75 10
A
T
bulunur. S
U
M
.
R
D
(22-9)
Örnek : Bir noktadan ağırlıksız iple asılmış q yüküne ve
m kütlesine sahip küçük bir küre
küre, şekilde gösterildiği gibi
E = Aˆi + Bˆj (N/C) ile verilen düzgün bir elektrik alan içinde
dengededir. A ve B pozitif sabitlerdir. Kürenin yükünü ve
ipte oluşan gerilmeyi bulunuz.
F 0
A
L
Y
LE
I
D
L
I
Y
M
I
R
T sin qE x qA
qA R.
mg tan
q
tan
D
T cos qB mg
mg
A B tan
e qB
T sin qA
v
T
A
L
qA
A mg O
tan
mgA
T
P
A B tan cos A B tan
sin sin A
F
A
b l
bulunur.
T
S
U
M
.
R
D
(22-10)
Elektrik Dipol :
Aralarında d uzaklığı olan, eşit ve zıt işaretli iki
M
I
yükten q oluşan sisteme "elektrik dipol
denir
nir.
R " de
I
D
L
I
Her elektrik dipol, "elektrik dipolYmoment (p)"
A p = qd ve yönü
vektörü ile tanımlanır. Büyüklüğü
L
Y
E doğru
yükünden q yyüküne
ğ dur. Su molekülü
de - q y
L
.
R
(H O) gibi birçok
molekül kendiliğinden bir dipol
D
v
momente
t sahiptir.
hie ti Oksijen
Ok ij atomu
t
ile
il iki hidr
hid ojjen
T
A
L
atomu arasındaki bağ,
ğ, 10
değerlik
ğ
elektron
paylaşımı
p
y
ş
ile
sağlanır
ğ
(
(8
tane
O
P
O' dan, 1' er tane de
H' den). Bu 10 değerlik elektronu O atomuna yakın
A
F
olma
l eğilimindedir.
ğili T
iA
d di Bu
B nedenle
d l su molekülünde,
l külü d O' nun bbulunduğu
l d ğ taraf
t f
S
H atomlarının
bulunduğu tarafa göre daha negatiftir.
U
M
.
R
D
2
(22-11)
Dipolün Oluşturduğu Elektrik Alan :
Dipolü oluşturan yüklerin P noktasında oluşturdukları
M
I
elektrik alanların büyüklükleri:
R
I
D
1 q
1 q
L E( ) E( )
EInet
E( )
ve E( )
2
2
4 0 r
4 0 r Y
Enett
Enet
.
R
D
A
L
1 EY q
L
1 q
q
q
2 2 .
2
2
4 0 r
r 4 0 z d / 2
z
d
/
2
R
D
e
2
2
q
d
v d
1 1
2 T
4 0 zA 2 z
2 z
L
d PO
2
1 yaklaşımı yapılırsa 1 x 1 2 x :
A
2Fz
A
T
q d d
qd
1 p
S
Enet
1 1 =
U
2
3
3
4
z
z
z
2
z
2
z
M
0
0
0
(22-12)
Sürekli Yük Dağılımlarının Oluşturduğu Elektrik Alan:
Q,A
Q,V
dq
dq
dV
dA
Q dq
(C/m)
L dl
Q dq
(C/m2 )
A dA
LA
Y
LE
I
D
L
I
Y dq
Q
V
dV
M
I
R
(C/m3 )
(C/
.
R
- Q yükü L uzunluğunda bir çubuğa
düzgün dağılmış ise,
D
e
v
çizgisel yük dağılımı sözTkonusudur.
A
L
- Q yükü A yüzey alanına
sahip bir plakaya düzgün dağılmış
O
P
A dağılımı söz konusudur.
ise, yüzeyselFyük
A
T
- Q yüküSV hacmine sahip katı bir cisme düzgün dağılmış ise,
U
hacimsel
konusudur.
M yük dağılımı söz konusudur
.
R
D
(22-13)
Yanda verilen hacimsel yük dağılımını gözönüne
alalım. Bu yük dağılımının P noktasında oluşturduğu
IM
R
I
D
elekrik alanı hesaplamak için izlenmesi
gereken
yol
L
I
Y
A
şöyle
ö l öözetlenebilir:
tl bili
L
Y
E
L
1 Yük ddağılımını,
1.
ğl
hacmi
h i dV olan
l sonsuz. küçük
kü ük elemanlara
l
l ayıralım.
l
R
D ve P noktası dq yükünden
Her eleman dq dV yüküneesahiptir
v
T
r kadar uzaktadır.
A
L
2. dq
d yükünü
k
nokta
k yük
k kkabul
b l ederek
d k P nokta
k sında
d oluşturduğu
l
d
d
dE
PO
A
F
yaz ve yyük dağılımı
y
ğ
üzerinden integralini
g
al (topla).
( p )
elektrik alanını
A
T
S
dq
1 dV
U
E
dEM
rˆ
2
2
40r
40 r
.
R
D
(22-14)
Örnek : Homojen yüklü sonsuz uzunluktaki bir çubuk
şekildeki
kild ki gibi
ibi x-ekseni
k i üzerinde
ü i d bulunmaktadır.
b l
kt d Çubuk
Ç b k
çizgisel yük yoğunluğuna sahip ise, çubuktan y kadar
uzaktaki bir noktada elektrik alan ifadesini bulunuz.
dq
q
dx
dE k 2 k 2
r
x y2
k
2
y
A
L
Y
LE
I
D
L
I
Y
M
I
R
ddx
.
E dE cos k y
R
D
x y e
1 x / y
v
tan x / y
T k 1 tan d k
A
cos d
L E
y
y 1 tan
y
1 tan d dxP/ O
A
F
k
k
x
2k
A
E
sin
E
T
yS
y x y
y
2 y
U
M
.
bulunur.
R
d
dx
2 3/ 2
2
2 3/ 2
2
2
2
2
3/ 2
2
2
D
0
(22-15)
Örnek : Uzunluğu L olan homojen yüklü bir çubuk şekildeki
gibi x-ekseni üzerinde bulunmaktadır. Çubuk çizgisel yük
yoğunluğuna sahip ise, çubuğun orta noktasından y kadar
uzaktaki bir noktada elektrik alan ifadesini bulunuz.
dq
q
dx
dE k 2 k 2
r
x y2
L/2
A
L
Y
LE
k
2
y
I
D
L
I
Y
M
I
R
L/2
dx
d
.
E dE cos k y
R
D
x ye
1 x / y
v
tan x / y
T k 1 tan d k
A
cos d
L E
y
y 1 tan
y
1 tan d dxP/ O
A
F
k
k
x
k L
A
E
sin
E
T
yS
y x y
y L / 2 y
U
M
.
Rbulunur.
L/2
d
dx
2 3/ 2
2
2
L/2
2 3/ 2
2
2
2
3/ 2
L/2
2
2
2
2
L/2
D
(22-16)
Örnek : Uzunluğu L olan homojen yüklü bir çubuk
şekildeki gibi x-ekseni
ekseni üzerinde bulunmaktadır.
bulunmaktadır
Çubuk çizgisel yük yoğunluğuna sahip ise, orijinden
x kadar uzaktaki (x > L) bir P noktasında elektrik
alan ifadesini bulunuz.
A
L
Y
LE
dq
dx '
dE k 2 k
2
x
x x '
I
D
L
I
Y
M
I
R
.
R
u D
x x '
dx '
k du
E dE k
; ve
E k
du
dx
'
y
u
'
x
x
T
A
L
1
1
1 O
1
E k k P k
u
x x '
A
x L x
F
k LTA
E
x (U
xS
L)
M
.
bulunur.
R
D
L
2
2
2
0
L
0
(22-17)
Örnek : x-ekseni üzerinde bulunan, uzunluğu L olan bir çubuk
Ax
A çizgisel
i i l yükk yoğunluğuna
ğ l ğ
sahiptir.
hi i (A pozitif
i if bir,
bi x ise
i
çubuğun ortasından olan uzaklıktır. Çubuğun ortasından y kadar
uzaktaki bir noktada elektrik alan ifadesi nedir?
dqq
dx
xdx
dE k 2 k 2
kA 2
2
2
r
x
y
x
y
D
I
D
L
I
Y
M
I
R
A
L
Y
E
L
L/2
L/2
.
xdx R
xdx
E dE cos kAy
2 kAy
D
3/
2
2
2
2
2 3/ 2
ey
L/2 x v
0 x y
T
1/ 2
A
du
u
L
2
2
u x y du O
2 xdx E kAy 3/ 2 kAy
P
u
1 / 2
A
F
L/2
A
T
1
y
S
bulunur.
E U
2 kAy
2 kA 1
2
2
2
2
M
x
y
L
/
2
y
0
.
R
(22-18)
Örnek : Homojen yüklü ince bir çubuk, R yarıçaplı
çemberin bir parçası olacak şekilde bükülüyor. Şekilde
M
I
ğ ggibi,, yyayı
y ggören açı
ç ' dir. Yayın
y ççizgisel
g
yyük
verildiği
R
I
yoğunluğu ise, çemberin merkezindeki (O noktası) ILD
Y
elektrik
l kt ik alan
l nedir?
di ?
A
L
dq
dl
Rd k EY
dE k 2 k 2 k 2 . L d
r
R
R
R
R
D
/2
e
k
k
/2
v
E dE cos
cos d
sin / 2
T
R LA
R
/2
O
P
2k
2k
A
ˆ
E
sinF E
sin i bulunur.
R TA 2
R
2
S
2k
U
. M E
iî ve 2 E 0
R
R
D
(22-19)
Örnek : Yüklü ince bir çubuk bükülerek, şekildeki
gibi
ibi yarıçapı R olan
l yarım çember
b haline
h li getiriliyor.
ti ili
M
I
Çubuk üzerindeki bir noktadaki yük yoğunluğu, o
R
I
D
noktanın konum vektörü ile düşey arasındaki açıya
L
I
Y
= Acos ifadesi ile bağlıdır.
bağlıdır Yarım çemberin merkezindeki
(O noktası)
A
L
Y
elektrik alan nedir?
E
L
.
dq
dl
cos RdR kA
dE k 2 k 2 kA
cos d
D
2
r
R
Re
R
v
/ 2T
/2
A
2 kAL
2 kA 1 cos 2
2
E 2 dE cos O cos d
d
R 0
2
PR 0
A /2
F
kA TAsin
i 2
kA ˆ
A ˆ
E
E
j
j bulunur.
S
RU
2 0
2R
8 0 R
M
.
R
D
(22-20)
Örnek : Q yükü R yarıçaplı bir çember üzerine düzgün
olarak
l k dağılmıştır.
d ğl
t Çemberin
Ç b i merkezinden
k i d dik olarak
l k
geçen z -ekseni üzerinde ve merkezden z kadar uzaktaki
P noktasında elektrik alanı (E ) bulunuz. Hangi z değerinde
elektrik alan maksimum olur?
dq
dq
; dEyatay dE sin 0 ve dEz dE cos
dE k 2 k 2
2
r
z R
A
L
Y
LE
I
D
L
I
Y
.
zQ
R
dE k
dq k
E dE k D
e z R
z R
z R
v
T
A
Q
L
zQ
ˆ
ˆ
k ; Oz 0 E 0 ve z R E k
E k
k
z R P
z
A
F
A
z R 3z
T
dE
Q
0z R E
S
0 kQ
U
z R
dz
2
6 3R
M
.
R
D
zdq
z
2
2
z
2 3/2
z
z
2
M
I
R
Q
2 3/2
2 3/2
2
0
2 3/2
2
2
2
2
2
2 5/ 2
max
2
0
(22-21)
Örnek : Yarıçapı R olan ince bir disk düzgün yüzey
yük yoğunluğuna sahiptir. Diskin merkezinden dik olarak
M
I
ggeçen
ç eksen üzerinde ve merkezden z kadar uzaktaki bir
R
I
D
P noktasında elektrik alanı (E ) bulunuz.
IL
Y
A
L
zQ
zdq
z 2 rdr
Y
Ek
dE k
k
E
z R
z Rr .L z r
D
u z r
rdr
d
z du
e
v
E dE kz
k 2
;
E
T
u
4
du
rdr
2
z LAr
O
P
ˆ
z u
z
1
z
E
A
E
1
k
F
4 ( 1 A
/ 2)
2 z r
2
z R
T
S
U
zRE
k̂
M
2
.
R
D
(22-22)
2
2
3/ 2
2
2
R
0
3/ 2
2
2
2
2
2
3/ 2
2
3/ 2
3/ 2
0
R
1/ 2
0
0
0
2
2
0
0
2
2
Örnek : Yarıçapı R ve yüksekliği h olan ince silindirik
bir kabuk,
kabuk xy -düzlemine
düzlemine tabanı orijinde olacak şekilde
yerleştirilmiştir. Silindir düzgün yük yoğunluğuna sahip
I
D
L
I
Y
olduğuna göre, ekseni üzerindeki herhangi bir noktadaki
(P ) elektrik alanı bulunuz.
M
I
R
A
L
z z ' dq
z z ' 2 Rdz '
zQ
Y
Ek
dE k
k
E
z R
R . L
z z ' R
z z ' R
D
z z ' dz '
u
z
z
'
R
R
E dE
;e
v
2
z z ' RAT du 2 z z ' dz '
L
O R u
P
R du
R
1
E
E
A 4 ( 1 / 2) 2 z z ' R
4 u
F
A
T
S
RU
1
1
h
E M
kk̂ ; z = E 0
2 z h R
2
.
z R
R
D
2
2
3/ 2
2
2
3/ 2
2
2
h
2
0 0
2
2
3/ 2
2
3/ 2
h
1/ 2
3/ 2
0
0
0
2
2
0
2
2
2
0
2
(22-23)
Örnek : Yarıçapı R ve Q yükünün üzerine düzgün dağıldığı çembersel bir
hhalkanın
lk
merkezine
k i q yüküne
ükü sahip
hi noktasal
k
l bir
bi parçacıkk yerleştirilmiştir.
l i il i i
q yükünü, çemberin merkezinden geçen dik eksen boyunca z R olacak
M
I
R
I
şekilde çekip serbest bırakalım. q yükünün basit harmonikD
hareket
L
I
Y
yyapacağını
p ğ ggösteriniz ve hareketinin pperiyodunu
y
bulunuz.
A
L
Y
zQ
LE z
Ek
F qE F .kqQ
R
z R
z R
D
e için: F Cz
Basit harmonik haraket yapan birvcisim
C olmalıdır
olmalıdır.
T
A
kqQ
L
zRF
z cisim basit harmonik haraket y
yapıyor.
py
R PO
A2 kqQ
kqQ
mR
F
a
z A
T 2
mR ST
T
mR
kqQ
U
M
.
R
D
2 3/ 2
2
2
2 3/ 2
3
3
3
3
(22-24)
Elektrik Alan Çizgileri : İlk kez 19. yy' da Michael Faraday tarafından
elektrik alan vektörünü resmetmek için ortaya konmuştur. Elektrik alan
M
I
çizgileri ile elektrik alan vektörü arasında şu ilişkiler vardır : IR
LD
I
1. Herhangi bir P noktasında, elektrik alan vektörü EY
elektrik
alan
çizgisine teğettir.
LA
.
R
D
e
Y
LE
2 Elektrik
2.
Elektrikalanşiddeti
alan şiddeti, elektrikalançizgilerininyoğunluğuileorantılıdır
elektrik alançizgilerinin
yoğunluğu ile orantılıdır.
v
T
A
A
F
A
L
O
P
U
M
.
R
D
T
S
(22-25)
Örnek : Sonsuz geniş yüklü plakanın oluşturduğu elektrik alan
çizgileri.
i il i
M
1. Plakanın her iki tarafında elektrik alan şiddeti sabittir.
I
R
I
D
2. Elektrik alan vektörü plakaya diktir.
L
I
Y doğrudur.
3. Elektrik alan vektörünün yönü, plakadan dışarı
A
L
Not : Plaka negatif yüklü olsaydı, elektrik
alan vektörünün
Y
E
L
yönü
ö ü plakaya
l k
ddoğru
ğ olurdu.
l d .
R
D
e
A
F
A
A
L
O
v
T
P
U
M
.
R
D
T
S
(22-26)
3. Elektrik alan çizgileri pozitif yüklerden çıkarak negatif yüklerde
sonlanırlar.
Örnek : q yükünün
y
oluşturduğu
ğ elektrik alan çizgil
g eri :
q
Ek 2
r
A
L
Y
LE
.
-Elektrik alan çizgileri yüke doğrudur.
R
D
-Elektrik
El kt ik alan
l çizgilerinin
i il i i yönü,
ö vüe E' nin
i
T
A
yönünü verir.
L
O
P
-Birim yüzeyden geçen elektrik alan
A
F
çizgilerinin
younluğu yüke yaklaştıkça
Ayounluğu,
T
S
artmaktadır.
U
M
.
R
D
I
D
L
I
Y
M
I
R
(22-27)
Bir elektrik
elektrikdipolününoluşturduğu
dipolünün oluşturduğu
Özdeş iki pozitif yükün oluşturduğu
elektrik alan çizgileri:
elektrik alan çizgileri:
.
R
D
e
A
F
A
A
L
O
A
L
Y
LE
I
D
L
I
Y
M
I
R
v
T
P
U
M
.
R
D
T
S
(22-28)
Düzgün Elektrik Alan İçinde Elektrik Dipol :
Yanda x - ekseni yönünde düzgün bir elektrik alan
M
I
ç
bulunan elektrik dipolünü
p
ele alalım.
içinde
IRPozitif
DF = qE
ve negatif yüklere, sırasıyla, F+ = qEILve
Y
kuvvetleri eetkir.
tkir Dipole etkiyenAnet kuvvet,
kuvvet
L
Y
F = qE qE = 0 olacaktır.
E
L
.
Dipolün kütle merkezine göre F D
veRF kuvvetlerinin oluşturduğu
e
v
nett tork
t k ise,
i
T
A d
d
L
τ= τ +τ = F
sin
θ+ F
sinθ = qEdsin θ = pE sin θ
O
2P
2
FA
oolur
u ve τ = A
p × E formunda
o u da yazılabilir.
ya ab . Bu
u da, dü
düzgün
gü eelektrik
e t
T
S
alan içindeki
dipolün ötelenemeyeceğini ancak, kütle merkezi
U
etrafında
t. M
f d dö
döneceğini
ği i gösterir.
ö t i
R
D
net
+
+
+
(22-29)
Düzgün Elektrik Alandaki Elektrik Dipolünün Potansiyel Enerjisi :
U d pE sin ' d
90
(d azalma yönündedir)
90
U pE sin d pE cos
90
U = p E
v yönde
p ile
il E aynı
ö d ( 0) U min pE
E.
E
p
p
E
T
A
L kararlı denge
Sistem
g durumundadır.
A
F
A
T
S
U
M
.
R
D
.
R
D
e
A
L
Y
LE
I
D
L
I
Y
M
I
R
PO
p ile
il E tters yönde
ö d ( 180) U max pE
E.
Sistem kararsız denge durumundadır.
(22-30)
Düzgün
g Elektrik Alan İçindeki Elektrik Dipolü
p
Üzerinde Dış Kuvvetin Yaptığı İş :
M
I
Dü ü bir
Düzgün
bi E elektrik
l kt ik alanı
l içinde,
i i d alanla
l l IRi açısı
D
L a). Bir dış
I
yapan bir p elektrik dipolü olsun (ŞekilY
A
L b' deki gibi E ile
kuvvetin yardımıyla dipolü Y
Şekil-
E
L
s açısı yapacak şekilde
çevirelim.
çevirelim
Dış kuvvetin
.
R durumdaki potansiyel enerjisi
yaptığı iş, dipolünDson
e
v
ile ilk durumdaki potansiyel enerjisi arasındaki fark
T
A
kadardır:
L
O
P
W U U pE cos pE cos
FA
s
U
M
.
R
D
A
T
S
i
s
i
W pE
E cos i cos s
(22-31)
Örnek : Yükleri q1 = 2.0 C ve q2 = 2.0 C, aralarındaki
mesafe d = 5 mm olan bir elektrik dipolü,
dipolü merkezi orijinde
olacak şekilde z-ekseni üzerinde konmuştur. z-eksenine dik
ve dipolün merkezinden 1.5 m uzaktaki bir noktada elektrik
alan nedir?
I
D
L
I
Y
M
I
R
A
q
L
Y ; E k
2E 2
2
d / 2. L x
d / 2 x2
R
Ex E cos D
E cos 0
e
E E E ;
v
E y E sinT E sin 2 E sin
A
L
qd
k
O
ˆ
ˆ
E E y k k
k
p
P2
3/2
3/2
2
2
2
A
d / 2 x
d / 2 x
F
A
T
S
ˆ
E 26.7k
N/m
U
M
.
R
D
p qd k̂ 1108 C m ; E k
q
(22-32)
Örnek : Yükleri q = 1.6 1019 C ve aralarındaki mesafe
d = 0.125
0 125 nm olan bir elektrik dipolü,
dipolü büyüklüğü 5 105 N/C
olan düzgün bir elektrik alan içine şekilde görüldüğü gibi
yerleştirilmiştir Dipol ve elektri
yerleştirilmiştir.
elektrikk alan sayfa düzlemindedir.
düzlemindedir
Elektrik dipol momentini, dipole etkiyen torku ve dipolün potansiyel enerjisini
b l
bulunuz.
Di
Dipol,
l elektrik
l k ik alan
l tarafından
f d kendisiyle
k di i l aynı yönde
ö d oluncaya
l
kadar
k d
döndürülür. Elektrik alanın yaptığı iş ne olur?
.
R
D
e
A
L
Y
LE
I
D
L
I
Y
M
I
R
p qd 1.6 1019 0.125 109 = 2.0 1029 C m ( yükten + yüke doğru)
p E pE sin 22.00 1029 5 105 sin145
v
T
5.7 1024 N
LAm (sayfa düzleminden dışarı doğru)
PO
U p E U pE cos145 2.0 1029 5 105 cos145
A
F
U
8.2
8 2 10
A
T
S
24
J
W = U W pE (cos145 cos 0) 2.0 1029 5 105 (1.82)
U
M
.
R
D
W 1.82 10 23 J
(22-33)
BÖLÜM-23
Gauss Yasası
M
I
R
B bölü
Bu
bölüm kapsamında
k
d şu kkonulara
l ddeğinilecektir:
ği il kti
• Elektrik akısı (Φ)
• Simetri
• Gauss yasası
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
• Düzgün yüklü sonsuz geniş yalıtkan
plakanın,
T
A çubuğun,
• Düzgün yüklü sonsuz uzunL
yalıtkan
O ve kürenin
• Düzgün yüklü küresel P
kabuğun
A
Falanları hesaplayacağız. Gauss yasasını kullanarak,
oluşturduğu elektrik
A
iletkenlerin içinde
ç ST ve dışındaki
ş
elektrik alanlar da hesaplanacaktır.
p
U
M
.
R
D
Gauss yasasını uygulayarak;
(23-1)
Bir Vektörün Akısı : Hızı v olan bir hava akımı, A yüzey alanına sahip bir
yüzeye
yü
eye doğru
doğ u geliyor
ge yo oolsun
su ve hız ve
vektörü
tö ü v ilee yü
yüzeyin
ey normali
o a (nˆ ) arasındaki
a as da
M
I
açı da olsun. İlgili yüzeyden geçen akı, vA cos bağıntısı ile verilir
R ve
I
D
bu örnekte "hacimsel
hacimsel akış hızı (debi)"
(debi) anlamı taşır
taşır.
L
I
Y
yöndeyse
Not - 1 : Hava akımının hızı, geldiği yüzeyin normali ile aynı
A
L
Y
(v , yüzeye
ü
dik) akı
k maksimumdur
ki
d (vA
A).
) H
Hız yüzeyin
ü i normaline
li dik ise
i
E
L
(v , yüzeye paralel) akı sıfırdır.
.
R
D
Not - 2 : vA cos v A biçiminde yazılabilir.
Burada A vektörü,
e
v
yyüzeyin
y normali ile aynı
y yyönde,, büyüklüğü
y T ğ A olan bir vektördür. İsmine
A
"yüzey alan vektörü" diyebiliriz. L
O
P
A
F
A
T
S
U
M
.
R
D
(23-2)
Elektrik Alan Akısı :
Şekildeki gibi E elektrik alanı içinde kapalı bir yüzey
M
I
düşünelim. Bu yüzeyden geçen elektrik akısı şöyle
R
I
D
tanımlanır:
L
I
Y
1. Yüzeyi, A alanına sahip sonsuz küçük
elemanlara
A
L
ayıralım.
l
Y
E
L
2. Her elemandan geçen akı
E A EA cos olacaktır.
.
R
D
E A olarak bulunur.
3. Toplam akı;
e
v
y
geçen
g ç akıya
y eşittir.
ş
4. A 0 durumundaki
limit, yyüzeyden
T
A
LE dA (N m / C)
O
P
A
F Not -1: İntegral sembolü üzerindeki çember, integralin
2
S
S
U
D
M
.
R
A
T
kapalı yüzey üzerinden alınacağını gösterir.
Note 2 : Elektrik akısı (), yüzeyden geçen elektrik alan
ççizgilerinin
g
sayısıyla
y y orantılıdır.
(23-3)
Örnek : Yükü 1.0 C olan noktasal bir parçacığın,
merkezinde bulunduğu 1.0 m yarıçaplı küresel bir
yyüzeyden
y
ggeçirdiği
ç ğ elektriksel akıyı
y hesaplayınız.
p y
E
M
I
R
dA
I
D
L
YI
r
q
A
L
Y
E
elektrik alan, kendisinden dışarı doğrudur ve büyüklüğü,
L
.
R
q
D
Ek
e
r
v
T
ile verilir.
verilir Bu durumda,
durumda
A
L
q
O
d E dA EdA cos 0P k dA
r
A
F
A
q
q
q
1 10
k dA T
k 4 r
1.13 10
S
rU
8 85 10
8.85
r
M
bulunur.
.
R
D
Pozitif bir q noktasal yükünün kendisinden r kadar uzakta oluşturduğu
2
2
6
2
2
S
12
2
0
5
N m2
C
(23-4)
Örnek : Kenar uzunluğu a olan bir küp, şekildeki
gibi,
ibi pozitif
itif x-ekseni
k i yönünde
ö ü d dü
düzgün
ü bi
bir E elektrik
l kt ik
alanı içinde bulunmaktadır. Küpün yüzeylerinden
geçen toplam elektrik akısı nedir?
A
L
Y
LE
M
I
R
I
D
L
YI
Yüzey alan vektörleri y-ekseni (3 ve 4 nolu. yüzeyler) ve z-ekseni
R
D
doğrultusunda olan yüzeyler (ön ve arka
yüzeyler), elektrik alan
e
v
vektörüne diktir. Bu yyüzeyler
y akıya
y katkı g
getirmezler. Toplam
p
akı,,
T
A
L
1 ve 2 nolu yüzeylerden katkılanır:
PO
E dA E A
dA Ea
E c os180
180 Ea
E c os 0
F
A
T
S
Ea
E U
1 1 0
M
.
bulunur.
R
D
2
1
S1
2
2
S2
2
(23-5)
Örnek : Büyüklüğü 3.5 kN/C olan ve pozitif x-ekseni yönünde yönelmiş
düzgün bir elektrik alan içine, uzunluğu 0.70 m ve genişliği 0.35 m olanIM
R
I
dikdörtgen şeklinde bir plaka konuluyor. Aşağıdaki durumlar için D
plakadan
L
I
Y
geçen akıyı hesaplayınız.
A
L
Y
E plaka
b) plaka normali x-ekseni ile 40 açı yapıyor ve L
y -ekseni
.
R
yüzeyinde bulunuyorsa
D
e
v
A 0.35 0.7 245 10 Tm
A
L
Nm
O
ˆ
a ) E A i EAP 3.5 10 245 10 857.5
C
A
F
A
E T
Akˆ EA ˆi kˆ 0
S
U
M
Nm
ˆ
ˆ
.
b ) R
E A cos 40i A sin 40k EA cos 40 657
C
D
a ) pplaka yyz ve xyy düzlemlerinde bulunuyorsa
y
o
3
yz
2
3
3
2
xyy
2
(23-6)
Örnek : Kare prizma şeklindeki kapalı bir yüzey,
şekildeki gibi,
gibi pozitif x-ekseni yönünde ve şiddeti
M
I
R
E = (3 + 2 x ) ifadesi ile değişen bir elektrik alanı
2
iiçinde
i d bulunmaktadır.
b l
kt d a = b = 0.4
0 4 m ve c = 0.6
06m
olduğuna göre, kare prizmanın yüzeyinden geçen
toplam elektrik akısı nedir?
.
R
A
L
Y
LE
I
D
L
YI
Yüzeyy alan vektörleri y -ekseni ve z -ekseni doğrultusunda
ğ
olan yüzeyler
y y
D
e
v
Bu yüzden akıya katkı getirmezler.TToplam akı, karesel yüzeylerden
A
L
katkılanır:
PO
E dA E dA
E
abb cos180
180 E
abb cos 0
A
F
A
T
S
Nm
U
ab (3 2 a ) 3 2 a c ab 2 a c 2 a 0.27
M
C
.
b D
bulunur.
l nRr
(bir kenarı c olan dikdörtgensel yüzeyler) elektrik alan vektörüne diktir.
1
S1
2
S2
2
xa
xac
2
2
2
2
(23-7)
Örnek : Pozitif q yüklü bir parçacık, şekildeki gibi,
R yarıçaplı
l bir
bi küre
kü kabuğunun
k b ğ
merkezindedir.
k i d di Şekilde
Ş kild
gösterildiği gibi, yükün gördüğü 2 ' lık bir katı açının
gördüğü yüzeyden geçen akıyı bulunuz.
M
I
R
R
I
D
L
YI
q
A
L
Küre yüzeyi üzerinde r yarıçaplı dr kalınlığındaYbir
E
L
halkadan geçen akı,
.
R
D
q
erdr
d E dA EdA cos ' k
2
v
R
T
A q
q
L
sin ' d '
d
Rd '
R sin ' O
P
2 R
2
A
F
q
q
q
A
sinT
' d '
cos ' (1 cos )
S
2 U
2
2
M
q
q
.
R/ 2
;
D
2
2
2
0
0
0
0
0
0
0
0
0
(23-8)
Gauss Yasası :
Gauss yasası şu şekilde formüle edilir
edilir :
M
I
R
Herhangi bir yüzeyden geçen akı ε0 = yüzeyin içindeki net yükDI
Φε0 =qiç
ε0 E dA q iç
A
L
Y için geçerlidir.
Not -1: Gauss yasası her kapalı E
yüzey
L
.
p yyüzey
y içindeki
ç R net yükü
y
belirlerken,
Not - 2: Kapalı
D
yüklerin işaretlerini
dikkate almak gerekir.
e
v
n̂
Not -3: GaussTyasasını uygulark
uygularken
en, akıya katkıları
A
L
olmadığı için yüzeyin dışındaki yükler işleme
O
P katılmaz.
k tl
A
FYandaki şekil için;
A
ST
S
nˆ
nn̂
D
.
R
L
I
Y
U
M
S1 yüzeyi : 01 q,
S2 yüzeyi : 02 q
S3 yyüzeyi
y : 03 0,
S4 yü
y zeyi
y : 04 q q 0
(23-9)
Gauss Yasası ve Coulomb Yasası :
M
I
R
Gauss yasası ve Coulomb yasası, durgun elektrikte elektrik
yükü ile elektrik alan arasındaki ilişkiyi farklı biçimlerde
I
D
L
açıklayan bağıntılardır. Her ikisi de birbirinden
YI türetilebilir.
A türetelim:
ğ , Coulomb yasasını
y
Gauss yyasasından
Örneğin,
L
Y
E
L
q nokta yükünden r kadar uzaktaki bir P noktasındaki
elektrik alan Gauss
.
R
yasasından bulunabilir. q yükünü merkez kabul
eden r yarıçaplı küresel bir
D
e
v
Gaussiyen yüzey seçelim. Gaussiyen yüzeyi, yüzey alanı dA olan sonsuz
T
küçük elemanlara bölelim. HerbirA
elemandan geçen akı,
L
O
d EdA cos 0 EdA
P
bulunur. Buradan da, A
F
A
dA E 4 r
EdA E T
S
U
q
q
M
.q q E 4 r q E
k
4 r
r
R
D
sonucuna ulaşılır.
2
S
S
2
0
iç
0
2
2
0
(23-10)
Simetri: Bir cisme uygulanan fiziksel bir işlem (döndürme, öteleme gibi)
sonucunda,
d cisim
i i aynı kkalıyorsa
l
“simetriktir”
“ i t ikti ” denir.
d i
S
U
M
.
R
M
I
R
I
D
L
M k i d
Merkezinden
geçen düşey
dü
eksen
k
etrafında
t f dI serbestçe
b t
Y gözlerini
dönebilen bir küre düşünelim. Gözlemci
A
L
kapattıktan sonra küreyi ekseniYetrafında çevirelim.
çevirelim
E kürenin döndürülüp
Gözlemci gözlerini açtığında,
L
.
ğ
anlayabilir
y
mi?
döndürüldüğünü
R
D
e
Ekseni etrafında vserbestçe
dönebilen bir silindir
T
düşünelim Gözlemci
düşünelim.
gözlerini kapattıktan sonra silindiri
A
L
ekseni etrafında çevirelim. Gözlemci gözlerini açtığında,
O
Pdöndürülüpp döndürülmediğini
ğ anlayabilir
y
mi?
silindirin
A
F her iki örnek için de “hayır” olacaktır. Bu
Cevap
A
T
durumda, hem küre hem de silindir dönme eksenlerine
durumda
göre simetriktir deriz.
D
(23-11)
Ötelenme Simetrisi:
Sonsuz geniş bir düzlem düşünelim. Uçan halı
üzerindeki bir gözlemci bu düzlemin üzerinde
sabit bir yükseklikte olsun. Gözlemci gözlerini
kapattıktan
p
sonra bir miktar ötelensin. Gözlerini
açtığında, hareket edip etmediğini anlayabilir mi?
Cevap “hayır” olacaktır. Bu durumda, düzlem
ötelenme simetrisine sahiptir deriz.
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Gauss Yasası Uygulanırken İzlenecek
Yol:
A
L
O
P olarak çiziniz.
• Yük dağılımını geometrik
çiziniz
A
• Yük dağılımınınF
simetrisini ve elektrik alanına etkisini belirleyiniz.
A
T her kapalı
• Gauss y
yasası
p yyüzeyy için
ç ggeçerlidir.
ç
akısının en kolay
y
S
U
hesaplanabileceği
en uygun yüzeyi belirleyiniz.
M alanı hesaplamak için Gauss yasasını uygulayınız.
• Elektrik
.
R
D
(23-12)
Sonsuz Uzunlukta Düzgün Yüklü Çubuğun Oluşturduğu Elektrik Alan:
M
I
R
Şekilde düzgün çizgisel yük yoğunluğuna sahip bir çubuk
verilmiştir. Çubuğun simetrisi dikkate alınırsa, oluşturduğu
elektrik alanın kendinden dışarı doğru ve r uzaklığındaki
tüm noktalarda şiddetinin de aynı olduğu ortaya çıkar. Bu
yüzden, çubuğu eksen alan r yarıçaplı, h yüksekliğinde
yüzeyy Gaussiyen
y yyüzey
y olarak seçilebilir.
ç
silindirik bir y
.
R
A
L
Y
LE
I
D
L
YI
D
egibi düşünebiliriz: Üst yüzey S , yanal
Gaussiyen yüzeyi üç farklı yüzeyin birleşimi
v
yüzey
ü S ve ttaban
b yüzey
ü S . Yü
Yüzeyden
d AT
geçen nett akı,
k olacaktır.
l kt
L
S ve S yüzeylerinde, yüzey normali
ile elektrik alan vektörleri birbirlerine dik
O
P
olduğu
ld
i i ve akıları
için
kA
l sıfırdır.
f d Bu ddurumda
d net akı,
k
F
A
EdA T
E 2 rh cos 0 2 rhE
S
U
M
q
h
2k
.
Gauss
yasasından:
E
R
r
2 r
D
1
2
1
3
1
2
3
3
1
3
2
S2
iç
0
0
0
(23-13)
Örnek : Yarıçapı R ve düzgün hacimsel yük
yoğunluğu olan bir kürenin içinde ve dışındaki
bölgelerde elektrik alanını bulunuz
bulunuz.
rR
qiç
qiç
E dA E dA cos 0
0
S
0
.
R
S
iç
3
A
L
Y
LE
0
dE
dA
r
R
R
E
30
0
S
2
I
D
L
YI
R
D
e
v
T
O
P
4 R
4
FA
q RA E 4 r
3
3ST
U
M
.
R
0
S
M
I
R
dA
r
3
4
r
r
4 3
2
qiç r E 4 r
E
3 0
3 0
3
qiç
qiç
E dA cos 0
r R E dA
LA
dE
3
E
R
3 0 r 2
3
R
r
D
(23-14)
Örnek : Yarıçapı
ç p R ve Q yyükünün yyüzeyine
y düzgün
g
dağıldığı ince küresel bir kabuğun içinde ve dışındaki
böl l d elektrik
bölgelerde
l kt ik alanını
l
b l
bulunuz.
rR
qiç
E dA
0
S
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
qiç 0 dA 0 olduğundan
e E0
rR
v
T
qiç A
qiç
L E dA cos 0
E dA
S
A
F 2
O
P0
Q
A
qiç Q E
4 r E 4 r 2 k r 2
T
S
0
0
.
R
Q
0
S
Q
U
M
D
(23-15)
Örnek : İç yarıçapı a, dış yarıçapı b ve düzgün
hacimsel yük
ük yoğunluğu
oğ nl ğ olan küresel bir kabuk
kab k
için, r a; a r b ve r b bölgelerindeki
elektrik alanını bulunuz.
qiç
E dA
0
ra
qiç 0 dA 0 olduğundan E 0
D
e
v
T
a
O
P
A
F 4 b
A
r b E 4T
r
S
U
M
.
R
D
2
3
0
3
a3
E
b3 a3
3 0 r 2
M
I
R
I
D
L
YI
b
Q
dE
dA
r
a
b
dE
Q
dA
r
4
3
3
r 3 a3
r
a
2
3
E
a r b E 4 r
0
3 0 r 2
LA
dE
dA
r
A
L
Y
LE
S
.
R
Q
a
b
(b3-a3)
E
30 r2
a
b
r
(23-16)
Örnek : Yarıçapı R ve hacimsel yük yoğunluğu
qiç
E dA
A
L
Y
E
L
.
r R q 4 r ' dr ' r ' 4 r R
' dr ' r
D
e
v
r
r
T
E 4 r
EA
L
4
O
P
r R q 4F
A
r ' dr ' r ' 4 r ' dr ' R
A
T
S
R
R
U
E 4 r
E
M
4 r
.
R
D
I
D
L
YI
iç
0
0
R
4
0
0
4
2
2
0
0
0
0
R2
E
40
0
R
R
2
iç
dA
r
r
2
dE
0
2
M
I
R
R
bölgelerde elektrik alanını bulunuz.
r
dA
r
0 r olan bir kürenin içinde ve dışındaki
S
dE
2
0
0
R
r
4
0
0
4
2
0
4
0
2
0
0
(23-17)
Örnek : Yarıçapı R olan sonsuz uzunluktaki bir
silindirin
ili di i düzgün
dü ü hacimsel
h i
l yük
ük yoğunluğu
ğ l ğ ' ddur.
silindirin içinde ve dışındaki noktalarda elektrik
alanını bulunuz.
A
L
Yük dağılımının simetrisi nedeniyle,
nedeniyle Gaussiyen yüzey
Y
E
L
olarak silindir seçilir. S ve S yüzeylerinden
akıya
.
R
hiçbir katkı gelmez (dA E ). Bu durumda:
D
e
v
q
T
E dA
A
L
O
P
r h
A
r
r R E 2 rhA
E
F
2
T
S
U
R h
R
M
rR
E 2 rh
E
.
R
2 r
D
1
M
I
R
I
D
L
YI
3
içç
S2
0
2
0
0
2
0
2
0
(23-18)
ÖDEV : Yarıçapı R olan sonsuz uzunluktaki bir silindirin M
I
R
hacimsel yük yoğunluğu 0 r ile veriliyor. 0 bir sabit
I
D
L
ve r ' de silindir ekseninden olan uzaklıktır. Silindirin
YI içinde
A
L
ve dışındaki bölgede elektr
elektrik
ik alanını bulunuz
ve silindir
Y
E
L
ekseninden olan uzaklığa karşı değişimini
çiziniz.
.
R
D
e b olan düzgün yük
v
ÖDEV : İç yarıçapı a, dış yarıçapı
T
Auzunlukta bir silindirin ekseni
yoğunluğuna sahip sonsuz
L
O
P
üzerinde düzgün
üzerinde,
çizgisel
yükü yaşıyan sonsuz uzun bir
A
F
A
çubuk yerleştirilmiştir.
r a ; a r b ; r > b bölgelerinde
T
S
U
elektrik
alanlarını
bulunuz.
M
.
R
D
(23-19)
Sonsuz Geniş, Yalıtkan, Yüklü Plakanın
Ol t d ğ Elektrik
Oluşturduğu
El kt ik Alan
Al :
I
Plakanın pozitif ve düzgün yüzey yükIyoğunluğuna
LD
Y elektrik
sahip olduğunu varsayalım. Simetri nedeniyle
A
L
alan plakaya dik,
dik dışarı doğru Y
ve büyüklüğü her yerde
E
L
aynıdır. Şekildeki gibi, plakanın ortadan kestiği, kesit
.
R
alanı A olan silindirik
bir Gaussiyen yüzey seçebiliriz.
seçebiliriz
D
e yüzeyden oluşmuş gibi düşünebiliriz:
Silindiri üç farklı
v
T
S ğ kesit
Sağ
k it
S
, yanall yüzey
ü
S ve soll kesit
k it S . Yüzeyden
Yü d
A
L
geçen
net akı, olacaktır.
O
P
EA cos 0 EA ve 0 ( = 90)
1
2
1
A
F
S
U
M
.
R
A
T
M
I
R
1
3
3
2
3
2
2 EA
Gauss yasasından:
qiç
0
A
E
.
2 0
0
D
(23-20)
M
I
R
I
D
L
YI
A
L
Y
E iki iletken plaka olsun.
Yüzeysel yük yoğunlukları ve - olan sonsuz geniş paralel
L
.
ş
, yükler
y
plakaların birbirine
p
bakan y
yüzeylerinde
y
toplanır.
p
Plakalar birbirine yyaklaştırılırsa,
R
D
Plakalar arasındaki bölgede elektrik alanını bulmak
için, kesit alanı A olan silindirik bir
e
v
Gaussiyen yüzey (S) seçerek Gauss yasasını
uygulayabiliriz:
T
A
L
q
2 A
2
O
EA
E
P
A
F elektrik alanı için de, kesit alanı A' olan S' silindirik
Plakaların dışındaki bölgelerdeki
A
Tseçer ve Gauss yasasını uygularsak:
Gaussiyen yüzeyini
S
U
qM
EA .
0 E 0
R
D
1
iç
1
0
0
iç
0
1
1
0
1
1
0
(23-21)
Örnek : Şekilde gösterildiği gibi, yarıçapı 2a
ve düzgün
d
hacimsel
h i
l yük
k yoğunluğu
ğ l ğ olan
l bir
bi
küreden a y
yarıçaplı
ç p bir bölge
g ççıkarılmıştır.
ş
y
Çıkarılan kısmın tam ortasındaki elektrik alan
nedir?
di ?
A
L
Y
LE
Verilen y
yük dağılımını,
ğ
, ve düzgün
gR. yyük
D
e iki
yoğunluklarına sahip 2a ve a yarıçaplı
v
T i DDolayısı
kü i ttoplamı
kürenin
l
gibi
ibi düşünebiliriz.
dü ü A
bili
l
M
I
R
a
I
D
L
YI
2a
a
2a
x
+
a
L
O
ile, ilgili noktadaki toplam
P elektrik alan:
A
AFr '
r
a
=
E
T
3
3
3
S
U
M
olarak. bulunur.
R
D
0 r a
0
r ' 0
0
(23-22)
Bir İletken İçindeki Elektrik Alan :
M
I
R
I
D
L
dolaşabilen çok sayıda elektron barındıran malzemeler
olarak
YI
tanımlanır. İletkenin içinde E 0 olduğunu
ğLA düşünelim:
Y
E
Bu durumda, iletkenin içindeki elektronlar
sıfırdan farklı
L
.
F eE bir kuvvetin etkisiR
altında kalırlar. Bu nedenle
D
elektronlar ivmeli bir hareket yapacak v
veedolayısıyla bir elektrik akımı
T
oluşturmaları gerekecektir. BöyleA
olması durumunda da;
L
O
(a) İletkenin ısınması gerekir.
P
A manyetik alan oluşmalıdır.
(b) İletken çevresindeFbir
A
Şu ana kadar böyle
etkiler hiç gözlenmemiştir. Buradan da,
T
S
U
"Bir iletkenin içindeki durgun elektrik alan E sıfırdır." sonucunu çıkarabiliriz.
M
.
R
D
Soldaki iletkeni gözönüne alalım. İletkenler, içinde serbestçe
(23-23)
İzole Edillmiş Yüklü İletken :
M
I
R
Yanda
Y
d ttoplam
l
yükü
ükü q olan
l bi
bir il
iletken
tk verilmiştir.
il i ti Yük,
Yük
iletkende nasıl dağılmıştır? Bu soruyu yanıtlamak için,
I
D
L
il k i hemen
iletkenin
h
içinde
i i d bir
bi Gaussiyen
G
i
yüzey
ü I seçelim
li ve
Y
Gauss yasasını uygulayalım. İletkeninAiçinde E 0
L
Y
olduğundan,
E
L
.
R
D
q
e : Φ = (Eş - 2).
Φ = E ΔA = 0 (Eş -1) ve Gauss yasasından
v
ε
T
Aiçindeki yük sıfırdır (q = 0). İletkenin
L
Bu iki eşitlik birleştirilirse iletkenin
O
P olduğunu bildiğimizden,
sıfırdan farklı q yüküne sahip
bildiğimizden bu yükün sadece
A
F
iletkenin yüzeyindeA
bulunabileceği
sonucuna ulaşırız.
T iletkenin içinde bulunamazlar.
"Elektrostatik
Elektrostatik yükler,
yükler
bulunamazlar
S
U
Ancak yüzeyinde
bulunabilirler."
M
.
R
D
iç
S
0
iç
(23-24)
İçinde Boşluk Bulunan Yalıtılmış Yüklü İletken:
M
I
Yanda toplam yükü q olan bir iletken verilmiştir. Boşluğun
R
I
D
duvarında yük bulunurmu? Bu soruyu yine,
yine Gauss
yasası
L
I
Y
yardımıyla cevaplayabiliriz. Bunun için,Aşekildeki gibi
L
Y
boşluğun hemen dışında bir Gaussiyen
yüzey seçebiliriz.
E
L
.
ğ
İletkenin içinde E 0 olduğundan,
R
D
e
v
q
T
E A 0 (Eş
(Eş-1)
1) ve Gauss yasasından:
(Eş
(Eş-2).
2)
A
L
O
P
A
Bu iki eşitlik birleştirilirse
seçilen Gaussiyen yüzeyin içindeki yük sıfırdır (q = 0).
F
A
Tduvarında herhangi bir yuk yoktur. Özetleyecek olurs
Dolayısıyla, boşluk
olursak;
ak;
S
U
"İletken içindeki
boşluğun duvarlarında yük bulunamaz. Tüm yük iletkenin dış
M
.
yüzeyinde
yüzeyinde
bulunabilir
bulunabilir".
R
D
iç
S
0
iç
(23-25)
Yüklü İletkenin Hemen Dışındaki Elektrik Alan :
M
I
R
Bir iletkenin içindeki elektrik alan sıfırdır. Ancak,
dışındaki elektrik alan sıfır değildir. Yüzeyin her
noktasında yüzeye diktir. Böyle olmasaydı, elektrik
alanın yüzeye paralel bir bileşeni olurdu ve yüzeyde
bulunan yüklerin ivmelenmesine sebep olurdu. Bu
g n e le ktrik " kabullenmemize a yykırı olurdu.
ise "durgu
A
L
Y
LE
.
R
I
D
L
YI
D
e
v
T
Gauss yasasını uygulamak için, şekideki gibi silindirik bir Gaussiyen yüzey
kullanacağız Bu silindirik yüzey S1 , S2 ve S3 gibi üç farklı yüzeyden oluşur.
kullanacağız.
oluşur
A
L
Net akı, bu yüzeylerden geçenO
akıların toplamı olacaktır:
P
EA cos 0 EA A
q
q 1
F
A
0
EA cos 90
E
EA
T
A
S
0U
M
.
q
R
, yüzeysel yük yoğunluğu tanımından
tanımından, E bulunur
bulunur.
DA
1
2
3 .
1
iç
iç
2
0
0
3
içç
0
(23-26)
Örnek : Yarıçapı a olan 2Q düzgün yüküne sahip bir küre,
şekildeki gibi iç yarıçapı b ve dış yarıçapı c olan Q yüküne
M
I
R
I
sahip iletken bir küre kabuğunun merkezinde bulunmaktadır.
D
L
1, 2, 3 ve 4 nolu bölgelerdeki elektrik alanını bulunuz.
YI
qiç
E dA
S
0
.
R
A
L
Y
LE
3
D
2
Qr
2Qr
2
1 nolu bölge: E 4 r
vEe k 3
3
a
0a T
2 nolu bölge: E 4 r
2
PO
A
F
A
L
2Q
0
2Q
Ek 2
r
3 nolu bölge: ETA0 (İletkenin içinde yük bulunamaz. İletkenin
S
iç çeperinde 2Q dış çeperinde Q yükü birikir.)
U
M
.
Q
Q
2
R
4 nolu
böl
E 4 r
Ek 2
D l bölge:
0
r
(23-27)
BÖLÜM-24
Elektrik Potansiyel
Bu bölümde, elektrik alanla ilgili elektrik potansiyel (V) kavramını
öğreneceğiz. Bu bağlamda aşağıdaki konulara değineceğiz:
Elektrik alandan potansiyelin bulunması.
Potansiyelden elektrik alanın bulunması.
Nokta yük ve yük grubunun oluşturduğu potansiyel.
Sürekli yük dağılımlarının oluşturduğu potansiyel.
Yük sistemlerinin potansiyel enerjisi.
Eş-potansiyel yüzeyler ve elektrik alan çizgileri.
İzole bir iltekenin oluşturduğu potansiyel.
(24-1)
Elektrik Potansiyel Enerji :
xs
∆U =
− ∫ F ( x)dx
xi
Korunumlu bir kuvvetin yaptığı iş, cismin potansiyel
enerjisindeki değişimin negatif işaretlisidir. Korunumlu
bir kuvvetin etkisiyle cisim xi noktasından xs noktasına
hareket etmişse,
xf
∆U =
−q0 ∫ E ⋅ ds
s
i
∆U =
−W =
− ∫ F ( x)dx
U f − Ui =
xi
yazılır. q0 nokta yükü, bilinen bir elektrik alanı
(E ) içinde, F = q0 E elektrik kuvvetinin etkisiyle
A noktasından B noktasına gitsin. Yükün potansiyel
enerjisindeki değişim,
s
s
∆U =
− ∫ F ⋅ dl =
−q0 ∫ E ⋅ dl
i
i
olacaktır. Bu değişim q0 yüküne bağlıdır.
(24-2)
Elekrik Potansiyel (V ) :
A ve B noktaları arasındaki elektrik potansiyel fark
(∆V ), bu noktalar arasında taşınan birim yük başına
potansiyel enerji değişimi olarak tarif edilir:
s
W
∆U
Vs − Vi =− ∫ E ⋅ dl
→ ∆V =
∆V = =−
q0
q0
i
Noktalardan birisinin potansiyeli biliniyorsa, diğer noktanın elektrik potansiyeli
bulunabilir. Genellikle, yükten çok uzaktaki bir noktanın potansiyeli sıfır alınır
(V=i V=
0). Bu durumda, herhangi bir P noktasının potansiyeli,
∞
P
− ∫ E ⋅ dl
VP =
∞
ifadesiyle verilir. SI sistemindeki birimi J/C (volt)' dir.
(24-3)
Örnek : Bir proton, şekilde gösterildiği gibi büyüklüğü 8 ×104 V/m
olan pozitif x-ekseni yönündeki düzgün bir elektrik alan içinde durgun
halden serbest bırakılıyor. Proton elektrik alan yönünde 0.5 m gittiğinde,
a −) A ve B noktaları arasındaki elektriksel potansiyel fark ne kadardır.
b −) Bu iki nokta arasında, protonun potansiyel enerjisinde ne kadarlık
bir değişim olmuştur?
c −) Proton B noktasına ulaştığındaki hızı ne olur?
B
a −) VB − VA =
− ∫ E ⋅ dl =
− ∫ Edl cos 0 =
− Ed =
− ( 8 × 104 ) ⋅ (0.5)
B
A
A
VB − VA =−4 ×104 V
b −) ∆U =q∆V → ∆U =(1.6 ×10−19 ) ⋅ ( −4 ×104 ) =−6.4 ×10−15 J
1
c −) ∆K + ∆U = 0 → m p v 2 = 6.4 × 10−15 → v = 2.77 × 106 m / s
2
(24-4)
Örnek : Şekildeki gibi, − y yönünde büyüklüğü
325 V/m olan düzgün bir elektrik alan vardır.
Koordinatı ( − 0.2, − 0.3) m olan A noktası ile
koordinatı (0.4,0.5) m olan B noktası arasındaki
potansiyel farkını bulunuz.
B
B
VB − VA =
− ∫ E ⋅ dl =
− ∫ Edl cos(90 + θ ) = E AB sin θ
A
( )
A
0.62 + 0.82 = 1 m
VB − VA 325 (=
1)( 0.8 ) 260 V
→=
0.8
sinθ =
= 0.8
1
C
C
B
B
VB − VA =
− ∫ E ⋅ dl − ∫ E ⋅ dl =
− ∫ Edl cos180 − ∫ Edl cos 90
AB =
A
( )
C
A
C
VB −=
VA E AC
= 325(0.8)
= 260 V
(24-5)
Nokta Yükün Potansiyeli :
Orijinde bir q nokta yükü bulunsun. Yükten R kadar
uzaktaki P noktasının potansiyelini bulmak için, q0
test yükünü P noktasından sonsuza götürmemiz gerekir.
Böylece,
∞
∞
− ∫ E ⋅ dl =
− ∫ Edr cos 0 =
− ∫ Edr
V∞ − VP =
∞
R
q
R
R
∞
dr
q
E=
→ −VP = −
=−
2
2
∫
4πε 0 r
4πε 0 R r
4πε 0
VP =
q
∞
1
r
R
q
4πε 0 R
1
bulunur. q nokta yükünün kendisinden r kadar uzakta
oluşturduğu elektrik potansiyel:
q
1 q
V
=
= k
r
4πε 0 r
(24-6)
Nokta Yük Grubunun Oluşturduğu Potansiyel :
Şekilde üç nokta yükten oluşan bir sistem verilmiştir. Bu
yüklerin herhangi bir P noktasında oluşturdukları elektrik
potansiyel, her birinin ilgili noktada oluşturduğu
potansiyellerin toplamıdır.
1. Her bir yükün P noktasında oluşturdukları elektrik potansiyeller bulunur:
1 q1
1 q2
1 q3
V1 =
; V2
; V3 =
4πε 0 r1
4πε 0 r2
4πε 0 r3
2. Tüm yüklerin oluşturdukları potansiyeller toplanır:
1 q1
1 q2
1 q3
V= V1 + V2 + V3 =
+
+
4πε 0 r1 4πε 0 r2 4πε 0 r3
n tane nokta yükten oluşan bir sistem için bu ifade şöyle yazılır:
1 q1
1 q2
1 qn
1
V=
+
+ ... +
=
4πε 0 r1 4πε 0 r2
4πε 0 rn 4πε 0
qi
∑
i =1 ri
n
(24-7)
Örnek : Şekilde gösterildiği gibi, ikizkenar bir üçgenin
köşelerine üç nokta yük yerleştirilmiştir. − q yüklerinin
bulunduğu doğrunun tam orta noktasındaki elektrik
potansiyelini hesaplayınız. (q = 7 µ C alımız).
h = 42 − 12 = 15 cm
q
q
V
= V+ q + 2V− q =
+ k − 2k
h
r− q
1
2
V = ( 9 ×10 ) ⋅ ( 7 × 10 )
−
−2
−2
1
10
×
15 ×10
5 1
− 2 =
−1.1×107 V
V =63 ×10
15
9
−6
(24-8)
Örnek : Şekilde gösterildiği gibi, q1 = 2 µ C' luk yük
−6 µ C' luk yük ise y =
orijinde ve q2 =
3 m noktasında
bulunmaktadır. Bu iki yükün, x = 4 m noktasında (P)
oluşturdukları toplam elektrik potansiyel ne kadardır?
r2
q3 = 3 µ C' luk üçüncü bir yükü P noktasına getirmek
için yapılması gereken işi bulunuz.
q1
q2
V =V1 + V2 = k + k
r1
r2
−6
−6
×
×
2
10
6
10
V=
( 9 ×109 ) ⋅ 4 − 5
3
=
−
×
6.3
10
V
−18.9 × 10−3 J
W =q3 (VP − V∞ ) =
3 × 10−6 ( −6.3 × 103 − 0 ) =
(24-9)
Örnek : Şekilde gösterildiği gibi, Q, − 2Q ve Q
nokta yükleri x-ekseni üzerine aralarındaki mesafe
a olacak şekilde yerleştirilmişlerdir. x > a olmak
üzere, x-ekseni üzerindeki herhangi bir noktadaki
elektrik potansiyelini bulunuz. x a durumundaki
potansiyel ifadesini türetiniz.
q3
q1
q2
+k
V = V1 + V2 + V3 = k + k
r1
r2
r3
V
2
1
2
1
2x
− +=
=
−
kQ
kQ 2
2
x
x+a x x−a
x −a
2kQa 2
3
2
−
x
a
x)
(
2kQa 2
2kQa 2
a →V
≈
x=
3
2
2
x3
x (1 − a / x )
(24-10)
Elektrik Dipolünün Oluşturduğu Potansiyel :
Solda bir elektrik dipolü verilmiştir. Dipolü oluşturan nokta
yüklerin P noktasında oluşturdukları V potansiyelini bulalım.
P noktası, dipolün merkezi olan O noktasından r kadar uzakta
ve OP doğrusu dipol ekseni ile θ açısı yapsın. Bu durumda P
noktasındaki potansiyel:
1 q
q
q r( − ) − r( + )
.
V = V( + ) + V( − ) =
−
=
4πε 0 r( + ) r( − ) 4πε 0 r( − ) r( + )
olur. d dipolü oluşturan yükler arasındaki mesafe olmak üzere,
r d yaklaşımı yapılırsa r( − ) r( + ) ≈ r 2 , ABC dik üçgeninden de
r( − ) − r( + ) ≈ d cos θ yazılabilir. Bu durumda,
q d cos θ
1 p cos θ
V≈
,
=
4πε 0 r 2
4πε 0 r 2
sonucuna ulaşılır. Burada, p = qd kısaltması yapılmıştır.
(24-11)
Sürekli Yük Dağılımlarının Oluşturduğu Potansiyel :
Şekildeki sürekli yük dağılımına sahip bir cisim verilmiştir.
Yük dağılımının herhangi bir noktada oluşturduğu elektrik
potansiyel V üstüste binme ilkesiyle şu şekilde bulunur:
1. Cisim, sonsuz küçük dq yüküne sahip elemanlara bölünür.
λd
çizgisel yük dağılımı → dq =
σ dA
yüzeysel yük dağılımı → dq =
ρ dV
hacimsel yük dağılımı → dq =
2. dq yükünün P noktasında oluşturduğu dV potansiyeli yazılır: dV =
1 dq
4πε 0 r
1 dq
3. Tüm yüklerin katkısı, yük dağılımı üzerinden integral alınarak bulunur: V =
4πε 0 ∫ r
(24-12)
Örnek : Şekilde L uzunluğunda ve λ düzgün yük yoğunluğuna
sahip ince bir çubuk verilmiştir. Çubuğun sol ucundan, çubuğa
dik doğrultuda d kadar yukardaki bir P noktasındaki elektrik
potansiyelini bulunuz.
Çubuğun sol ucundan x kadar ötede seçilen dx elemanının yükü
dq λ dx ve P noktasına uzaklığı da
r
d 2 + x 2 olduğundan,
=
=
dq yükünün P noktasında oluşturduğu elektrik potansiyeli:
dq
λ dx
dV k= k
=
r
d 2 + x2
L
V = kλ ∫
0
L + d 2 + L2
k λ ln
= k λ ln x + d + x =
0
d
d 2 + x2
(
dx
2
2
)
L
bulunur.
∫
dx
d 2 + x2
(
= ln x + d 2 + x 2
)
(24-13)
Örnek : Şekilde L uzunluğunda ve λ = α x yük yoğunluğuna
sahip ince bir çubuk verilmiştir. Burada α pozitif bir sabit ve
x çubuğun sol ucundan olan uzaklıktır. Çubuğun sol ucundan
yatay doğrultuda d kadar uzaklıkta bir P noktasındaki elektrik
potansiyeli bulunuz.
Çubuğun sol ucundan x kadar ötede seçilen dx elemanının yükü
dq= λ dx ve P noktasına uzaklığı da r= x + d olduğundan,
dq yükünün P noktasında oluşturduğu elektrik potansiyeli:
dq
xdx
α xdx
dV k= k = kα
=
r
x+d
x+d
L
L
xdx
L + d
V = kα ∫
= kα x − d ln ( x + d ) 0 = kα L − d ln
x
d
d
+
0
bulunur.
xdx
x − d ln ( x + d )
∫ x+d =
(24-14)
ÖDEV : Şekilde L uzunluğunda ve λ = α x yük
yoğunluğuna sahip ince bir çubuk verilmiştir.
Burada α pozitif bir sabit ve x çubuğun sol
ucundan olan uzaklıktır. Çubuğun ortasından
dik doğrultuda b kadar uzaklıkta bir P
noktasındaki elektrik potansiyeli bulunuz.
(24-15)
Örnek : Homojen yüklü ince bir çubuk, R yarıçaplı
çemberin bir parçası olacak şekilde bükülüyor. Şekilde
verildiği gibi, yayı gören açı φ ' dir. Yayın çizgisel yük
yoğunluğu λ ise, çemberin merkezindeki (O noktası)
elektrik potansiyeli nedir?
Yay üzerinde seçilen dl elemanının yükü dq = λ dl dir.
O noktasındaki toplam elektrik potansiyeli:
φ
dV = k
dq
dl
Rdθ
= kλ = kλ
= k λ dθ → V = k λ ∫ dθ = k λφ
r
R
R
0
olur.
λ
φ = π (yarım çember) → V = k λπ =
4ε 0
λ
φ 2π (tam çember) →=
λ 2π
V k=
2ε 0
(24-16)
Örnek : Q yükü R yarıçaplı bir çember üzerine düzgün
olarak dağılmıştır. Çemberin merkezinden dik olarak
geçen z -ekseni üzerinde ve merkezden z kadar uzaktaki
P noktasında elektrik potansiyelini bulunuz.
Çember üzerinde seçilen dl elemanının yükü
dq λ=
dl (Q / 2π R)dl ile verilir.
=
P noktasındaki toplam elektrik potansiyeli:
dq
Q
Q dl
Q 1
dV= k = k
; ∫ dl = 2π R
→ V= k
∫ dl= k
r
r
2π R r
2π R r
Q / 2π R ) λ
(
Q
Q
z=0 → V =
k
=
=
=
Q
R 4πε 0 R
2ε 0
2ε 0
V =k
;
2
2
z +R
z → ∞ → V =k Q (nokta yükün potansiyeli)
z
(24-17)
Örnek : Yarıçapı R olan ince bir disk düzgün σ yüzey
yük yoğunluğuna sahiptir. Diskin merkezinden dik olarak
geçen eksen üzerinde ve merkezden z kadar uzaktaki bir
P noktasında elektrik potansiyelini bulunuz.
Toplam yükü Q olan bir çemberin potansiyeli : V = k
Seçilen çemberin toplam yükü dq, potansiyeli dV dir.
Q
z2 + r2
dq
σ 2π rdr
k= k
z2 + r2
z2 + r2
dV
R
σ R rdr
∫
V ∫=
dV
=
∫
2
2
2
ε
z
r
+
0
0
0
R
σ 2
σ 2
2
V
z + r=
z + R2 − z
=
0 2ε 0
2ε 0
xdx
=
2
x + a2
x2 + a2
(22-18)
Örnek : İç yarıçapı a ve dış yarıçapı b olan ince
bir disk düzgün σ yüzey yük yoğunluğuna sahiptir.
Diskin merkezinden dik olarak geçen eksen üzerinde
ve merkezden z kadar uzaktaki bir P noktasında
elektrik potansiyelini bulunuz.
Toplam yükü Q olan bir çemberin potansiyeli : V = k
z
Q
z2 + r2
Seçilen çemberin toplam yükü dq, potansiyeli dV dir.
dq
σ 2π rdr
k= k
z2 + r2
z2 + r2
dV
V
=
b
dV
∫=
a
σ
2ε 0
b
∫
a
rdr
z2 + r2
∫
b
σ 2
σ 2
2
V
z +=
r
z + b2 − z 2 + a 2
=
a 2ε 0
2ε 0
xdx
=
2
x + a2
x2 + a2
(24-19)
ÖDEV : Yarıçapı R olan ince bir disk σ = Cr
ile değişen yüzey yük yoğunluğuna sahiptir. C
pozitif bir sabit ve r disk merkezinden olan
uzaklıktır. Diskin merkezinden dik olarak geçen
eksen üzerinde ve merkezden x kadar uzaktaki bir
P noktasında elektrik potansiyelini bulunuz.
(24-20)
Örnek : Yarıçapı R ve yüksekliği h olan ince silindirik
bir kabuk, xy -düzlemine tabanı orijinde olacak şekilde
yerleştirilmiştir. Silindir düzgün σ yük yoğunluğuna sahip
olduğuna göre, ekseni üzerindeki herhangi bir noktadaki
(P ) elektrik potansiyelini bulunuz.
Q
Toplam yükü Q olan bir çemberin potansiyeli : V = k
z2 + r2
Seçilen çemberin toplam yükü dq, potansiyeli dV dir.
dq
k= k
2
( z − z ') + R 2
dV
h
σR h
V ∫=
dV
=
∫
ε
2
0 0
0
V =− ln 2
∫
dx
(
2
( z − z ')
2
+ R2
dz '
( z − z ')
2
+ R2
h
z 2 + R2 + z
( z − z ') + R + z − z '
=ln
2
2
0
( z − h) + R + z − h
=− ln 2
(a − x) + b
2
σ 2π Rdz '
2
(
)
2
)
(a − x) 2 + b 2 + a − x
(22-21)
Örnek : Yarıçapı R olan bir küre düzgün ρ
hacimsel yük yoğunluğuna sahiptir. Sonsuzun
potansiyelini sıfır kabul ederek, küre dışında
ve küre içinde elektrik potansiyelini bulunuz.
rP
VP − V∞ =
− ∫ E ⋅ dl =
− ∫ Edl cos (180 )
rP
∞
; [ dl =
−dr ]
∞
rP
rP
rP
dr
VP − V∞ = − ∫ E ( −dr )( −1) = − ∫ Edr =
− kQ ∫ 2
r
∞
∞
∞
r
P
Q
1
Q
VP = −kQ =
k =
V
(
r
)
k
; r>R
r
r
∞
P
r
rM
rM
kQ
Qr
− ∫ Edr =
− ∫ k 3 dr =
− 3
VM − VR =
R
R
R
R
rM
∫
R
kQ 2
−
rdr =
r − R2 )
3 ( M
2R
kQ kQ 2
kQ
r2
2
−
VM =
r − R ) → V (r ) =
3− 2 ; r < R
3 ( M
R 2R
R
2R
(24-22)
İndüklenmiş Dipol Moment :
Su molekülü (H 2 O) gibi birçok molekül kendiliğinden bir dipol
momente sahiptir. Bu tür moleküllere "polar" moleküller denir.
Aksine, O 2 , N 2 , ... gibi moleküllerin dipol momentleri sıfırdır.
Bunlara da "polar olmayan" moleküller denir. Şekil-a' da böyle
bir molekül resmedilmiştir. Pozitif yük ile çevresindeki negatif
yük bulutu aynı merkezli olduğu için dipol momenti sıfırdır.
Şekil-b' de, elektrik alan içindeki polar olmayan molekülde ne
gibi bir değişim olduğu resmedilmiştir. Merkezleri çakışık olan
pozitif yük ve negatif yük bulutu, elektrik kuvvetinin etkisi
altında ayrışmıştır.
Böylece, polar olmayan molekül elektrik alan etkisiyle sıfırdan farklı bir dipol
momente sahip hale gelmiştir. Buna "indüklenmiş dipol moment" ve moleküle de
"kutuplanmış" tır denir. Elektrik alan kaldırıldığında, kutuplanma da ortadan
kalkar ve dipol moment tekrar sıfır olur.
(24-23)
Eş - Potansiyel Yüzeyler :
Potansiyelleri aynı olan noktaların oluşturduğu
yüzeye eş-potansiyel yüzey denir. Şekilde dört
farklı eş-potansiyel yüzey verilmiştir. Aralarındaki
potansiyel farkının ∆V olduğu iki nokta arasında,
q yükünü bir noktadan diğerine götürmek için
elektrik alan tarafından yapılan iş: W =−q∆V .
=
=
WI 0 olur.
I numaralı
yol : ∆V 0 olduğundan,
=
=
WII 0 olur.
II numaralı
yol : ∆V 0 olduğundan,
III numaralı yol : WIII =q∆V =q (V2 − V1 ) .
IV numaralı yol : WIV =q∆V =q (V2 − V1 ) .
Not : Bir yükü, eş-potansiyel bir yüzeyde ( ∆V =
0 ) hareket ettirmek için
elektrik alan tarafından herhangi bir iş yapılmaz (W = 0).
(24-24)
Elektrik Alan E, Eş - Potansiyel Yüzeylere Diktir :
Potansiyeli V olan bir eş-potansiyel yüzey olsun.
Herhangi bir q yükünü elektrik alan yardımıyla,
yüzey üzerindeki bir yol boyunca A noktasından
B noktasına götürelim. ∆r , yol üzerinde seçilmiş
bir uzunluk elemanıdır.
Herhangi bir anda elektrik alan vektörü E ile ∆r arasındaki
açıya θ dersek, elektrik alan tarafından yapılan iş,
W= F ⋅ ∆r= qE ⋅ ∆r= qE ∆r cos θ
bulunur. A ve B noktaları eş-potansiyel bir yüzey üzerinde
olduğu=
∆r cos θ 0 olmalıdır.
için, W 0 ve böylece, qE=
Buradan da θ= 90°, yani, elektrik alan eş-potansiyel yüzeye
dik olmalıdır.
(24-25)
Eş - Potansiyel Yüzeyler ve Elektrik alan Çizgileri :
Düzgün Elektrik Alan
İzole Nokta Yük
Elektrik Dipol
q Nokta Yükü için Eş - Potansiyel Yüzeyler :
q
q
V=
r
= sabit → =
= sabit
4πε 0 r
4πε 0V
q nokta yükünü merkez alan r yarıçaplı küresel yüzeyler, eş-potansiyel yüzeylerdir.
(24-26)
Potansiyelden Elektrik Alanın Bulunması :
Şu ana kadar, elektrik alanını bildiğimizi kabul ederek elektrik potansiyelini
bulduk. Şimdi de durumu tersine çevirelim. Elektrik potansiyeli bildiğimizi
varsayıp, elektrik alanını bulacağız. Potansiyelleri sırasıyla V ve V + dV olan
aralarında dl mesafesi bulunan iki eş-potansiyel yüzey olsun. Elektrik alanı,
q0 nokta yükünü dl doğrultusu boyunca V eş-potansiyel yüzeyinden V + dV
eş-potansiyel yüzeyine taşısın. Elektrik alan tarafından yapılan iş iki şekilde
verilir:
W = −q0 dV
W
=
Fdl
cos θ Eq0 dl cos θ
(Eş-1)
(Eş-2)
dV
−q0 dV → E cos θ =
−
Eq0 dl cos θ =
dl
bulunur. PAB dik üçgeninden E cos θ teriminin, E elektrik
alanının l doğrultusundaki bileşeni olduğu görülür.
(24-27)
∂V
Böylece, El = −
sonucuna ulaşılır. "Elektrik alanın herhangi
∂l
bir yöndeki bileşeni, o yönde elektriksel potansiyelin konuma göre
değişim hızının negatif işaretlisidir". Eğer l doğrultusu sırasıyla,
x , y ve z -ekseni alınırsa, elektrik alan bileşenleri:
∂V
∂V
∂V
Ex =
−
−
−
; Ey =
; Ez =
∂x
∂y
∂z
Elektrik potansiyeli konumun bir fonksiyonu V ( x, y, z ) ise, elektrik
alan vektörünün x, y ve z bileşenleri bulunabilir ve birim vektörler
cinsinden:
∂V ˆ ∂V ˆ ∂V ˆ
E=
−
i−
j−
k
∂x
∂y
∂z
şeklinde ifade edilebilir.
(24-28)
Örnek : Yarıçapı R olan iletken bir kürenin potansiyeli
kQ
, r<R
R
V (r ) =
kQ , r > R
r
şeklinde tanımlıdır. İletken kürenin içinde ve dışındaki elektrik
alanını bulunuz.
dV
El = −
dl
d kQ
r < R → Er =
−
(
)=
0
dr R
kQ
d kQ
kQ
r > R → Er =
−
(
) = 2 → E = 2 rˆ
r
r
dr r
(24-29)
Örnek : Uzayın belli bir bölgesindeki elektrik potansiyeli,
V ( x, y , z ) =
5 x − 3 x 2 y + 2 yz 2 (V) ile veriliyor. Bölgedeki
elektrik alan bileşenlerini bulunuz. (1, 0, − 2) noktasındaki
elektrik alan şiddetini hesaplayınız.
d
2
2
Ex =−
(5 x − 3 x y + 2 yz ) =−5 + 6 xy
dx
dV
d
−
→ Ey =
−
El =
(5 x − 3 x 2 y + 2 yz 2 ) =
3x 2 − 2 z 2
dl
dy
d
2
2
−
−4 yz
Ez =
(5 x − 3 x y + 2 yz ) =
dz
−5 V/m ; E y =−
−5 V/m ; Ez =
(1, 0, − 2) → Ex =
3 2*4 =
0
E=
( −5 ) + ( −5) + ( 0 ) = 25 2 V/m
2
2
2
(24-30)
Örnek : Yarıçapı R olan ve düzgün σ yüzey yük yoğunluğuna sahip
bir diskin, merkezinden dik olarak geçen z - ekseni üzerinde oluşturduğu
potansiyel
σ 2
V=
z + R2 − z
( z)
2ε 0
ile verilmektedir. Diskin bu eksen üzerinde oluşturduğu elektrik alanını
bulunuz.
dV
σ d 2
El =
z + R2 − z
−
→ Ez =
−
dl
2ε 0 dz
σ
Ez = −
2ε 0
σ
Ez
=
2ε 0
1 2
2 −1/ 2
2
1
z
R
z
+
−
)
2 (
1 −
2
2
z +R
z
(24-31)
Nokta Yük Sisteminin Potansiyel Enerjisi (U ):
Nokta yük grubunun elektrik potansiyel enerjisi
(U ), tek tek tüm yüklerin sonsuzdaki bir noktadan
alınıp bulundukları yere getirilmesi için yapılması
gereken toplam iş olarak tanımlanır.
Herhangi bir q yükünü aralarındaki potansiyel farkının ∆V
olduğu iki nokta arasında, bir noktadan diğerine taşımak
için yapılması gereken iş W =q∆V ile verilir. Buna uygun
olarak, nokta yük grubunu biraraya getirecek şekilde yükleri
teker teker bulundukları noktalara getirerek yapılan işleri
bulmamız ve net işi bulmak için de hepsini toplamamız gerekir.
(24-32)
q1 in getirilmesi : W1 = q1 ( ∆V ) = 0
q2 q1
q2 nin getirilmesi : W=
q2 (V12 − 0=)
2
4πε 0 r12
1 q1q3 q2 q3
q3 ün getirilmesi : W=
q3 (V13 + V23 − 0=)
+
3
4πε 0 r13
r23
q2 q3
q1q3
q1q2
+
+
W = W1 + W2 + W3 → W =
4πε 0 r12 4πε 0 r23 4πε 0 r13
(24-33)
q2 q3
q1q3
q1q2
+
+
U=
4πε 0 r12 4πε 0 r23 4πε 0 r13
n tane nokta yükten oluşan bir sistemin elektrik potansiyel
enerjisini matematiksel olarak,
U=
1
4πε 0
n
∑
i , j =1
i< j
qi q j
rij
ifadesi ile verebiliriz. Bu ifadedeki rij , qi ve q j nokta yükleri
arasındaki mesafedir.
Not : Her yük ikilisinin yalnızca bir defa yazılması gerektiğine
dikkat ediniz. Bu nedenle, kesikli toplama işlemi yapılırken
i < j kısıtlaması getirilmiştir.
(24-34)
Örnek : Şekildeki dört noktasal yükü biraraya
getirmek için gerekli işi hesaplayınız.
(q = 5.0 µ C alınız).
q1q3
q2 q3
q3 q4
q1q2
q1q4
q2 q4
+k
+k
+k
+k
+k
U =k
r12
r13
r14
r23
r24
r34
kq 2
=
U
10−2
2
2 3 2 6 4 6 kq
3 + 5 − 4 + 4 − 5 − 3=
10−2
9 × 10 )( 5 × 10 )
(
U =
9
10−2
−6
2
1
4
− 3 + 1 − 5
8
23
22.5 − =
−12 J
1 − 15 =
15
(24-35)
Örnek : Yarıçapı R olan ve düzgün ρ hacimsel yük yoğunluğuna sahip bir
kürenin toplam elektrik potansiyel enerjisini hesaplayınız.
Yükü sonsuzdan getirdiğimizi varsayalım. Herhangi bir anda
kürenin yarıçapı r ve yükü q olmak üzere elektrik potansiyeli:
q
V =k
r
ifadesine sahiptir. Kürenin yükünü dq kadar artırmak için
yapılması gereken iş dU = dqV ile verilir. Küre içinde, r
yarıçaplı dr kalınlığında ince bir küresel kabuk seçilirse,
toplam iş:
dq = ρ 4π r 2 dr
4πρ 2
= ∫ dqV →
=
U
4 3 →U
3ε 0
q = ρ πr
3
R
4πρ 2 R 5
=
∫0 r dr
15ε 0
4
(24-36)
Örnek : Yarıçapı R olan Q homojen yüküne sahip bir halkanın
merkezine, kütlesi m olan bir q nokta yükü yerleştirilmiştir.
Halka ekseni boyunca, q nokta yükü çok az bir miktar çekilip
durgun halden serbest bırakılırsa, ulaşabileceği maksimum hız
ne olur?
q nokta yükünün bulunduğu ilk noktanın elektrik potansiyeli:
dq kQ
Vi
k
∫=
R
R
ifadesine sahiptir. Sonsuzdaki bir noktanın potansiyeli de V∞ = 0
olduğundan, q nokta yükü üzerinde yapılan iş:
kQq
W = −∆U = − q (V∞ − V ) =
R
bulunur. W = ∆K eşitliği yardımıyla:
kQq 1
=
mv 2 − 0 →
=
v
R
2
bulunur.
2kQq
mR
(24-37)
İzole bir İletkenin Potansiyeli :
Bir iletkenin üzerindeki veya
içerisindeki A ve B notalarını
düşünelim. Bu noktalar arasındaki
VB − VA potansiyel farkı şu eşitlikle
verilir:
VB − VA =
− ∫ E ⋅ dl
B
A
Bir iletkenin içindeki elektrik alanının (E ) sıfır
olduğunu biliyoruz. Dolayısı ile, yukarıdaki integral
de sıfırdır ve VB = VA bulunur. Özetle, "iletken
eş-potansiyel bir yüzeydir".
(24-38)
Örnek : Yarıçapları r1 ve r2 olan iki iletken küre, yarıçaplarına
göre, birbirinden çok uzaktadır. Daha sonra küreler, şekildeki gibi,
iletken bir telle birbirine bağlanıyor. Küreler dengeye ulaştıktan
sonra üzerlerindeki yükler sırasıyla q1 ve q2 oluyor. Dengeye
ulaşıldıktan sonra, küre yüzeylerindeki elektrik alan şiddetlerinin
oranını (E1 /E2 ) bulunuz.
Denge durumuna ulaşıldığında, kürelerin potansiyelleri aynı olur:
q
q
V1 =
V2 → k 1 =k 2
r1
r2
Küre yüzeylerindeki elektrik alan şiddetlerinin oranı da:
q1
r12
→
q
E2 = k 22
r2
olur.
E1 = k
2
2
r1 r2
r2
E1 q1 r2
=
=
=
r1
E2 q2 r1
r2 r1
(24-39)
Dış Elektrik Alan İçinde İzole İletken :
Bir iletkenin yüzeyinin eş-potansiyel olduğunu
ve elektrik alan çizgilerinin de eş-potansiyel
yüzeylere dik olduğunu biliyoruz. Yanda, elektrik
alan içine konmuş bir iletken verilmiştir. Elektrik
alan çizgilerinin iletken yüzeyine dik olduğu ve
iletkenin içinde elektrik alanın sıfır olduğu açıkça görülmektedir.
İletkendeki tüm yükler, iletken içindeki elektrik alanı sıfır yapacak
yeni bir düzenlenme içerisine girerler. İletkenin hemen yüzeyindeki
σ
elektrik alan Edış =
ile verilir.
ε0
(24-40)
Yüklü Bir İletkenin İçinde ve
Dışındaki Elektrik Alan ve
Potansiyel (ÖZET) :
1. Tüm yük iletkenin yüzeyindedir.
2. İletkenin içinde elektrik alan sıfırdır: Eiç = 0.
σ
3. İletkenin hemen dışındaki elektrik alan: Edış = .
ε0
4. İletkenin hemen dışındaki elektrik alan iletken yüzeyine diktir.
5. İletkenin içinde ve yüzeyindeki tüm noktalar aynı potansiyele sahiptir.
İletken eş-potansiyel bir yüzeydir.
(24-41)
Yarıçapı R, Yükü q Olan Küresel İletkenin
Elektrik alanı ve Potansiyeli :
r<R
→
1 q
V =
4πε 0 R
E=0
r>R
→
1 q
V =
4πε 0 r
q
E=
4πε 0 r 2
1
(24-42)
BÖLÜM-25
BÖLÜM
25
Kapasitörler
Bu bölümde aşağıdaki konulara değinilecektir:
M
I
R
A
L
Y
LE
I
D
L
YI
.
• İzole
o e iki iletkenden
et e de oluşan
o uşa sistemin
s ste
sığası
s ğasR(C).
D
• Basit geometrilere sahip bazı kapasitörlerin
sığalarının hesabı.
e
v
• Seri ve paralel bağlı kapasitörlerde
eşdeğer sığa.
T
A
• Kapasitörde depolanan enerji.
L
O
• Plakaları arası dielektrikle
doldurulmuş kapasitörler.
P
• Dielektriğin
Di l kt iği varlığında
l ğ Ad Gauss
G
yasası.
F
A
T
S
U
M
.
R
D
(25-1)
Sığa (Kapasitans) :
M
I
R
Birisi q ve diğeri de - q yüküne sahip, aralarında hava ya da
I
boşluk
ş bulunan iki izole iletkenden oluşan
ş sisteme "kapasitör"
p
D
L
I
denir. Elektrik devrelerdeki sembolik gösterimi,Yiletken plakaları
A yükü denilince,
L
temsil eden paralel iki çizgidir. Bir kapasitörün
Y
E Şekilde görüldüğü
plakalardaki yükün mutlak değeri L
anlaşılır.
.
gibi plakalarındaki yükten dolayı
gibi,
kapasitörü çevreleyen uzayda
R
D
e
v
T
bir elektrik alan oluşur. Pozitif ve negatif
yüklü plakaların potansiyelleri, sırasıyla,
A
L
V ve V ' dir. Böylece, plakalar O
P arasındaki potansiyel farkı da V V V V
A
ifadesiyle verilir. Bir kapasitörün
yükü (q), plakaları arasındaki potansiyel fark (V )
F
A
ile doğru orantılıdır.
Orantı
sabiti de, o kapasitörün sığasıdır ve birim potansiyel fark
T
S
başına yük olarak
tarif edilir.
U
Mq
.
R
C
C/V Farad (F)
D
V
(25-2)
Paralel Plakalı Kapasitör :
M
I
R
I
D
L
YI
A
L
Yparalel plakadan oluşan
Plakalarının yüzey alanı A ve aralarında d mesafesi bulunanEiki
L plakalar arası mesafeye
sisteme "paralel plakalı kapasitör" denir. Plakaların boyutları,
.
R
göre çok büyüktür. Bu nedenle, plakalar arasındaki
bölgede elektrik alan düzgün, kenar
D
e
v
kısımlarına yakın bölgelerde ise düzgün değildir. Plakaların dışındaki bölgelerde elektrik
T
A
alan "sıfır" dır.
L
BataryalarO
:
P
İki ucu
arasında
d sabit
bi bir
bi potansiyel
i l fark
f k oluşturan
l
ve bunu
b
sürekli
ü kli
A
F cihazlara "batarya" diyoruz. Elektrik devrelerinde biri uzun
kılan
A
Tdiğeri
S
diğ i kısa
k iki paralel
l l çizgi
i i ile
il sembolize
b li edilirler.
dili l Uzun
U
çizgi
i i
U
M
potansiyelin pozitif olduğu ucu, kısa çizgi de potansiyelin negatif
.
R
olduğu
ld ğ ucu gösterir.
öt i
D
(25-3)
Kapasitörün Yüklenmesi :
M
I
R
Yanda bir kapasitörün doldurulması için basit bir devre
I
D
kurulmuştur. S anahtarı kapatıldığında, batarya
negatif
L
I
Y
ucundan kapasitörün "2" nolu plakasına elektron sürer.
A
L
Bataryanın pozitif ucu da,
da "1"
1 nolu
plakadan eşit sayıda
Y
E yük ve plakalar
elektronu toplar. Böylece, plakalardaki
L
.
R
arasında başlangıçta sıfır
olan potansiyel fark artmaya
D
e bataryanın birim zamanda topladığı
başlar. Sonuç olarak,
v
Tük azalır.
ve sürdüğü
ü düğüAyük
l Yük akışı,
k kapasitörün
k
i ö ü plakaları
l k l
L
O
arasındaki
P potansiyel fark bataryanın uçları arasındaki
A
potansiyel farka eşit olana kadar devam eder ve sonra
F
S
U
A
T
durur.
M
.
R
D
(25-4)
Sığanın Hesaplanması :
M
I
Bir kapasitörün sığası, plakalarının boyutlarına,
R
I
D
şekline ve birbirlerine göre konumlarına,
konumlarına
özetle
L
I
geometrisine, bağlıdır. Sığa hesabıY
için aşağıda
A
L
sıralanan yol izlenir:
Y
E
L
.
1 Plakaların
1.
Pl k l
D
qR
ve q yüklü
üklü old
ldukları
kl varsayılır.
l
e
2. Plakalarvarası bölgedeki elektrik alan Gauss
T
A
yasasından bulunur ε E dA q .
L
O
P
0
A
F
iç
3. Plakalar arasındaki potansiyel fark, V E dl eşitliği kullanılarak hesaplanır.
S
U
A
T
q
4. Hesaplanan potansiyel fark, C eşitliğinde yerine konur ve sığa bulunur.
V
M
.
R
D
(25-5)
Paralel Plakalı Kapasitörün Sığası :
M
I
R yükü
d olsun. Üstteki plakanın yükü q, alttaki plakanın
I
D
ise q' dur
dur. Plaka ile aynı kesit alanına sahip
ve plakayı
L
I
ortasına alan dikdörgen prizma şeklindeY
bir Gaussiyen
A
L
yüzey seçelim.
seçelim
Y
E
L
Gauss yasasını uygularsak, plakalar arasındaki bölgedeki
elektrik alanı:
.
R
q
q
D
EA cos 0 EA
E
e
A
v
T
b l
bulunur.
Buradan
B d dda, iki plaka
l k arasındaki
d
ki potansiyel
t i l ffarkk için,
i i
A
L
qd
O
V Edl cos180 E dlP
Ed
A
A
F
bağıntısı elde edilir.A
Dolayısıyla, paralel plakalı bir kapasitörün sığası:
T
S
A
q
q
U
C
C
V Mqd / A
d
.
olarak
l R
l
D k bbulunur.
Ş kild ki plakaların
Şekildeki
l k l
yüzey
ü
alanı
l A ve aralarındaki
l d ki mesafe
f
0
0
0
0
0
(25-6)
Örnek : Plakaları arası hava dolu olan paralel plakalı bir kapasitörün plakalarının
alanı 77.66 cm 2 ' dir ve aralarında 11.25
25 mm mesafe vardır
vardır. Plakalar arasındaki potansiyel
M
I
R
fark 20 V ise,
I
D
L
YI
a) plakalar arası bölgedeki elektrik alanını
b) plakalardaki yüzey yük yoğunluğunu
A
L
c ) kapasitörün sığasını ve plakalardaki yük miktarını
c
Y
E
bulunuz.
L
.
R
D
V
20
a ) V = Ed E = =
= 16 e
10 V / m
v
d 1.25 10
T
A
b ) E
E 8.85 L10 16 10 1.416 10
O
P
A 7.6 10
10
A 8.85 F
c ) C
5.381 10 F
A
T 1.25 10
d
S
QU
C = M Q = CV = 5.381 10 20 107.62 10 C
.
V
R
D
3
3
12
3
0
7
C / m2
0
12
4
12
0
3
12
12
(25-7)
Örnek : Plakaları arası hava dolu olan paralel plakalı bir kapasitörün plakaları
arasına 150 V
V' luk potansiyel fark uygulandığında, plakalardaki yüzeysel yük
2
yoğunluğu 30 nC/cm oluyor.
a) Kapasitörün plakaları arasındaki mesafe nedir?
a
M
I
R
I
D
L
I
Y
b) Plakaların yüzey alanı 4 cm ise, kapasitörün sığasını ve plakalardaki yük
A
L
miktarını bulunuz
bulunuz.
Y
E
L
.
R
a ) V = Ed = d
D
e
v
V 8.85 10 150 T
d=
=
=
4 425 10 m
4.425
A
(30 10 / 10 )L
O
8 85 10 P 4 10
A 8.85
A
b ) C
8 10 F
F
d
4.425 10
A
T
30 10
Q S
= U
Q = A=
4 10 120 10 C
A
M
10
.
R
D
2
0
12
6
0
9
4
12
4
10
0
6
9
4
9
4
(25-8)
Örnek : Ağırlıksız bir iple paralel plakalı kapasitörün pozitif
plakasına bağlı olan m kütleli bir q nokta yükü şekildeki gibi
dengededir. Plakalar arasındaki potansiyel farkını bulunuz.
Plakalardaki yük
ük miktarı
miktarı Q ise
ise, kapasitörün sığası ne ol
olur?
r?
A
L
Y
LE
M
I
R
I
D
L
YI
V = Edd
Denge durumunda, q nokta yükü üzerine etkiyen net
kuvvet sıfır olmalıdır:
.
R
A
L
O
P
D
e
v
T
T sin qE
qE
mg tan
tan
V
d
T cos mg
mg
q
A
T
Q
Qq
C
V mgd tan
S
U
A
F
M
.
R
D
(25-9)
Silindirik Kapasitör :
M
I
R
Aynı L uzunluğuna sahip, a ve b yarıçaplı eş-eksenli iki silindirik
I
D
L
YI
kabuktan oluşan sisteme "silindirik kapasitör" diyoruz. Silindirlerin
boyu yarıçaplarının yanında çok büyüktür. Silindirlerle aynı uzunluğa
A
L
Y
LE
sahip, r (a < r <b) yarıçaplı silindirik bir Gaussiyen yüzey seçerek,
ara bölgedeki elektrik alanını bulabiliriz:
2 rLE cos0 2 rLE
Q
.
E
R
Q
0 2 rL
D
e
v
Bu durumda, içteki ve dıştaki silindirler arasındaki potansiyel fark:
T
A
Q
dr
L
V Edl cos180 E ( dr ) cos180
O
2 L r
PQ
Q
A
b
r
ln
ln
F 2 L
2 L a
A
T
0
a
0
b
a
S
U
D
M
.
R
0
b
0
bulunur ve buradan da sığa: C
C
Q
Q
V Q / 2 L 0 ln b / a
2 L 0
ln b / a
(25-10)
Örnek : Uzunluğu 50 m olan koaksiyel bir kablolonun iç
iletkenin yarıçapı 1.3 mm ve taşıdığı yük 8 C' tur. Dış
iletkeninin ise iç yarıçapı 3.8 mm ve yükü 8 C' tur. İki
iletkenin arasındaki bölgenin hava ile dolu olduğunu kabul
ederek, kablonun kapasitansını ve iletkenleri arasındaki
potansiyel farkını bulunuz.
.
R
2 L 0
C
ln b / a
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
A
L
2(3.14)(50)(8.85 10 P)O
C
2.591 10
ln(3.8 / 1.3) A
F
A
T
S
Q
Q
8 10
U
C M
V
3.09 10
V.
C 2.591 10
R
D
12
6
9
9
F
3
V
(25-11)
Küresel Kapasitör :
M
I
R
Yarıçapları a ve b olan eş-merkezli iki küresel kabuktan
I
D
L
şekilde küresel bir Gaussiyen yüzey seçerek, Y
araI bölgedeki
A
elektrik alanını bulabiliriz:
L
Y
q
E q
4 r E cos 0 4 r E LE
.
4 r
R
D
Bu durumda, içteki ve dıştaki küreler arasındaki
potansiyel fark:
e
v
T
q
dr
A
V Edl cos180 E dr L
cos180
r
4
O
P
q 1
q A1 1
F
4 r T4A
a b
S
q
q
ab
U
C 4
bulunur ve
buradan da sığa: C
M
q
1
1
V
b
a
.
R
4
a
b
D
oluşan sisteme "küresel kapasitör" denir. a r b olacak
2
2
2
0
0
a
2
0 b
a
0
b
0
0
0
(25-12)
Örnek : Küresel bir kapasitör, yarıçapları 7 cm ve 14 cm olan
eş-merkezli
k li iki iletken
il k küreden
k d oluşmuştur.
l
K
Kapasitörün
i
sığasını
ğ IM
R
I
hesaplayınız.
p y
Kürelerin taşıdığı
ş ğ yyük 4 C ise,, küreler arasındaki
D
potansiyel farkını bulunuz.
Küresel bir kapasitörün sığası:
A
L
Y
LE
L
I
Y
.
ab
R
C 4 0
D
e
ba
v
T b 14 cm olduğuna göre,
ifadesine sahiptir.
sahiptir a 7 cmAve
göre
L
4
O
(7
14)
10
12
C 4(3.14)(8.85
4(3 14)(8 85 A
10 P12 )
15.56
15
56
10
2
(14
7)
10
F
A
T
S
U
Q. M
Q
4 10 6
5
C R V
2.57
2 57 10 V
12
DV
C 15.56 10
F
(25-13)
Örnek : Yarıçapı d olan çok uzun iki silindir, şekilde gösterildiği
gibi
ibi birbirlerine
bi bi l i paraleldir
l ldi ve eksenleri
k l i arasındaki
d ki mesafe
f D' di
dir.
M
I
R
I
D
L
oluşan bu sistemin birim uzunluğunun sığası ne olur? (L D, d). I
Y
Ave
Gauss y
yasası kullanılarak,, silindirlerin bulunduğu
ğ düzlemde
L
Y
E
silindirler arasındaki bölgede elektrik alan:
L
.
2 kQ
2 kQ
R
E
(
(pozitif
i if yükten
k
negatif
if D
yüke
k ddoğru)
ğ )
Lr
L( D r )
e
v
bulunur. Burada r , negatif yüklü silindi
r ekseninden olan uzaklıktır.
T
A
L
2O
kQ
1
1
V V V E dl P
dr cos180
L
r Dr
A
F d 4kQ D d
2 kQ D dA
V
ln
ln
T
ln
S
L d
D
d
L
d
U
Q . M L
C
C R
DV 4k ln D d L ln D d
Silindirler zıt işaretli Q yükleri taşıdığına göre, iki silindirden
Dd
Dd
d
d
0
d
d
(25-14)
Eşdeğer Kapasitör:
Sayfanın her iki yanında, bir batarya ve
M
I
R
I
D
üç farklı kapasitörden oluşmuş devreler
L
I
Y
verilmiştir. Amacımız, her iki devrede A
de
L
tü kkapasitörleri
tüm
itö l i temsil
t
il edebilecek
d bil kYtek
t k
E
L
bir kapasitörün sığasının C. ne olması
R
gerektiğini bulmak. D
e
v
T
Soldaki resimde (Şekil(Şekil a ve b),
) uyguladığımız
V potansiyel farkı
A
L yük miktarı aynıdır. Aynı
nedeniyle, bataryanın devreye O
sürdüğü
P lidi Başka
d
durum
sağdaki
ğd ki resim
i için
i i Ade
d geçerlidir.
B k deyişle,
d i l şekilkil a' dda
F
verilen sığaları (C ,C
,C ) ve şekil-b' deki sığayı (C ) ayrı ayrı
A
T
S
kapalı kutulara
alsak ve birtakım elektriksel ölçümler yapsak,
U
M bir fark bulamazdık.
ölçümler. arasında
R
D
eş
1
2
3
eş
(25-15)
Paralel Bağlı Kapasitörler :
M
I
R
ŞekilŞ
kil a' da
d bir
bi batarya
b
ve birbirine
bi bi i paralel
l l bağlı
b ğl üüç ffarklı
kl
kapasitörden oluşan bir devre verilmiştir. Paralel bağlı
olmaları herbirinin uçları arasındaki potansiyel fark ile
olmaları,
I
D
L
I
Y
bataryanın uçları arasındaki potansiyel farkın eşit olduğu
A
L
anlamına gelir.
gelir ŞekilŞekil b' deki gibi
gibi, batarya aynı kalmak
Y
E bu üç kapasitöre eşdeğer
koşuluyla, birbirine paralel bağlı
L
. y
tek bir kapasitör
p
bağlamak
ğ R istiyoruz.
D
e farkı vardır. Her biri üzerindeki
Her üç kapasitörün plakaları arasında aynı V potansiyel
v
yük sırasıyla
yük,
sırasıyla, q C V ; q C V ve q A
T
C V olacaktır.
olacaktır Bu durumda,
durumda batarya tarafından
L
devreye sürülen toplam yük ve eşdeğer
sığa:
O
P
q C C C V
A
C C C
q q q q C CF C V C
V
V
A
T paralel bağlı n tane kapasitörden oluşan devrenin eşdeğer sığası:
bulunur Özetle
bulunur.
Özetle, birbirine
S
U
n
M
Ceş C. C ... Cn C j
1 2
R
j 1
j
D
1
1
2
2
3
3
1
1
2
3
1
2
3
eş
2
3
1
2
3
(25-16)
Seri Bağlı Kapasitörler :
M
I
R
Şekil-a ' da bir batarya ve birbirine seri bağlı üç farklı kapasitörden
I
D
L
I
Y
bir batarya ile V gerilimi uygulanmıştır. Şekil-bA
' deki gibi, batarya
Lüç kapasitöre eşdeğer
a nı kalmak koşuluyla,
aynı
koş l la birbirine seri bağlı bbu
Y
E
tek bir kapasitör bağlamak istiyoruz. L
.
R
Aynı hat üzerinde old
oldukları
ukları için her
üç kapasitör de aynı q yüküne
D
sahip olacaktır. Böylece kapasitörlerin
uçları arasındaki gerilimler,
e
v
sırasıyla, V q / C , V T
q / C ve V q / C olacaktır. Kombinas
KombinasA to plam potansiyel fark ve eşdeğer sığa:
L
yonun iki ucu arasındaki
O
P
1
1A 1
q
1
1
1
1
V V V V q F C
A
C
C
C
V
C
C
C
C
T
S
Ö
Özetle,
birbirine
paralel bağlı n tane kapasitörden oluşan devrenin eşdeğer sığası:
U
nM1
1
.
=
R
Ceş i 1 Ci
D
oluşan bir devre verilmiştir. Bu, kapasitörlerin aynı hat üzerinde ard
arda
d sıralandığı
l d
anlamına
l
gelmektedir.
l k di Bu kombinasyonun
k bi
iki ucuna
1
1
2
1
3
2
2
3
3
eş
1
2
3
eq
1
2
3
(25-17)
Genellikle, kapasitörlerden oluşan bir devre
M
I
R
kendi içlerinde paralel ve seri bağlı küçük
alt g
gruplar
p içerir.
ç
Böyle
y durumlarda, önce
alt grupların eşdeğer sığaları bulunur ve
I
D
L
YI
A
L
Y
E
L
Yukarıda basit bir devre verilmiştir. A ve C uçları arasındaki
eşdeğer sığayı bulmak
.
R
i t li
isteyelim:
D
e
v
C ve C paralel
l l bağlıdır
b ğl d ((şekilkil a ) A
C T C C
L
1
1
1
C ve C seri bağlıdır (şekil-P
b) O
C
C
C
A
F
C C A C C C
C C
T
C S
C C C C
U
M
.
sonucuRelde edilir.
D edilir
gruba geçilir.
g ç
sonra da ana g
1
12
2
12
2
3
123
12
eşş
1
1
3
2
12
3
3
123
12
3
1
2
3
(25-18)
Örnek : Kapasitörlerden oluşan yandaki devrenin a ve b
uşları arasındaki eşdeğer sığasını hesaplayınız.
C 2 ile C3 paralel C 23 4 F.
F
C 4 ile C5 paralel C 45 8 F.
A
L
2 F. EY
L
.
R
D 4 F.
C1 ile C 23 seri
1
1 1 1
+ C123
C123 4 4 2
C 45 ile C 6 seri
1
1 1 1
+ C 456
C 456 8 8 4
e
v
T
M
I
R
I
D
L
YI
C123 ile C 456 paralel C eş 6 F.
F
A
F
S
U
A
L
O
P
A
T
M
.
R
D
(25-19)
Örnek : Kapasitörlerden oluşan yandaki
M
I
R
devrenin a ve b uşları arasındaki eşdeğer
sığasını bulunuz.
bulunuz
A
L
Y
L1 E 3
I
D
L
YI
1
1 1
C
C 4 , C5 ve C 6 seri
+ . C 456
C 456 C DCR C C
3
1
1 1ve 2
C
C 2 ve C3 seri
AT
+ C 23
C 23 LC C C
2
O
P
A
C1 , C 23 ve C 456 paralel
F
A
T
S
U
M
.
R
D
C C 11
C eş C + C
2 3
6
(25-20)
Örnek : Şekildeki devrede C1 = 6 F, C2 = 3 F
ve V = 20 V' tur. Önce S1 anahtarı kapatılarak C1
p
dolduruluyor.
y Daha sonra S1 anahtarı
kapasitörü
açılıp, S2 anahtarı kapatılıyor. C1 sığasının ilk
A
L
yükünü ve denge kkurulduktan
urulduktan sonra sığaların yüklerini
Y
E
L
bulunuz.
.
R
D
Q
e C V 120 C
S anahtarı kapatılırsa: C
vQ
VT
A
Q
Q
L
S açılıp, S kapatılırsa: O
V V
P
C
C
A
Q Q Q AF
T Q 80 C
Q
Q S
U Q 40 C
C.M
C
R
D
1
0
1
1
C1
2
0
1
0
C2
M
I
R
I
D
L
YI
1
1
2
1
2
2
1
1
2
2
1
2
(25-21)
Elektrik Alanda Depolanan Enerji:
M
I
R
Sığası C olan bir kapasitörü yüklemek için yapılması gereken
iş ne kadardır? Bunu hesaplamanın yolu da, dolan kapasitörün
I
D
L
herhangi bir andaki resmini çekmektir. Plakaları
YIarasındaki
A düşünelim.
gerilimin V' ve yyükünün de q
g
q' olduğu
ğ bir
an
ş
PlakaL
Y
Eyapılması gereken iş,
ların yükünü dq' kadar artırmak L
için
.
q
dW dq
d V ddq DR
C e
ile verilir. Kapasitörü toplam q yüküTilev yüklemek için yapılması gereken
A
toplam iş:
L
O
P 1 q 1 q
1
W
W V dq q dqA
C AF
C 2
2 C
T
bulunur
bulunur.
S
U
1
1
M
.
q CV W CV veya W qV
R
2
2
D
q
2
0
q
2
0
2
(25-22)
Kapasitörde Depolanan Potansiyel Enerji :
Kapasitörü yüklemek için harcadığımız enerji, kapasitörde potansiyel
M
I
R
enerji olarak depolanmıştır:
I
D
L
YI
q 2 CV 2 qV
U
2C
2
2
Bu enerji, kapasitörün boşaltılmasıyla tekrar kazanılabilen bir enerjidir.
Enerji Yoğunluğu :
.
R
A
L
Y
LE
Kapasitörün plakaları arasındaki bu bölgede E V / d ifadesi ile verilen düzgün bir
D
e
v
T
elektrik alan olduğu düşünülürse, enerjinin bu elektrik alanda depolandığını söylemek
yanlış olmaz. Başka deyimle, elektrik alan boş uzayda enerji depolar.
LA
U
.
Hacim
Paralel plakalı bir kapasitörün plakaları arasındaki bölgenin hacmi,
cmi A plakaların
Enerji yoğunluğu (u ), birim hacimdeki potansiyel enerji olarak tanımlanır: u
O
P
A
Farasındaki mesafe olmak üzere Hacim Ad olduğundan:
yüzey alanı ve d plakalar
A
T
V
U
US CV
1
A V
u
U
u E
Hacim
Ad 2 Ad d 2 Ad
2 d
2
M
.
sonucuna
ulaşılır.
ulaşılır Bu genel bir bağıntıdır ve her
her durumda geçerlidir.
geçerlidir
R
D
2
2
2
0
2
0
0
(25-23)
Örnek : Sığaları C1 ve C2 olan iki kapasitör, zıt kutuplu ve
plakaları arasında aynı Vi gerilimi olacak şekilde dolduruluyor.
M
I
R
Daha sonra bu kapasitörler bataryadan sökülerek yandaki devre
kuruluyor ve her iki anahtar da (S1 ve S2 ) aynı anda kapatılıyor.
I
D
L
I
a ) a ve b noktaları arasındaki V gerilim farkı ne olur?
Y
b ) Sistemin, anahtarlar kapatılmadan önce ve sonraki toplam enerjisini bulunuz.
A
L
Si t i son enerjisinin
Sistemin
ji i i ilk enerjisine
ji i oranı nedir?
di ?
Y
E
Q C V ve Q C V
L
a )
Q Q Q Q Q .
Q C V ve Q C V
R
D
e C Q ve Q C
Q
C
C
Q Q Q ( 1)Q vQ
Q
C
C
T
C C
C C
A
L
C
C
V
Q
Q
V
O
C
C C
C CP
A
F
1
1
1 C C
V
b ) U C C V Ave U C C V
T
2
2
2 C C
S
C
1 CU
M
V
.
2 C C
C C
U
R
DU 1
C C
s
1i
1 i
1s
1 s
1s
1
2s
2
2i
2 i
2s
2
s
1s
1
2s
2i
1s
2s
1
2s
2
2s
2
1s
s
1i
1
1
1s
2
1
2
Q
2
i
1
1
2
1
2
2
i
1
i
2
2
s
1
2
2
s
1
2
i
1
2
2
2
1
s
i
1
2
2
i
2
2
2
C1 C 2 Vi 2
1
2
1
2
(25-24)
Örnek : Yükü Q ve plaka alanı A olan paralel plakalı bir kapasitörün plakaları
M
I
R
arasındaki etkileşme kuvvetini bulunuz.
I
D
L
Herhangi bir anda plakalar arasındaki mesafe x olsun. Plakalar arasındaki
YI
A
mesafenin x dx olması için yapılması gereken iş:
L
Y
1 Q
E
1Q
L
dW U
.
2
C
2
C
R
D
A
e
C
v
Q x
xT
dx
Q
x
A
d
dx
dW
A
2 AL A 2 A
C
O
x dx
P
Q FA
dW Fdx F A
2 A
T
S
U
M
.
R
D
i
s
2
2
i
s
0
2
2
0
0
0
0
2
0
(25-25)
Dielektriğin Varlığında Kapasitörler:
M
I
Michael Faraday 1837 yılında, kapasitörün plakaları arasındaki
R
I
D
bölgeyi farklı yalıtkanlarla tamamen doldurarak,
doldurarak bunun
sığaya
L
I
Y sonucunda,
olan etkisini incelemiştir. Yaptığı birçok denemeler
A
L
yalıtkanla dol
doldurulmuş
durulmuş kapasitörlerin sığası
ile doldurulmadan
Y
E
L
önceki sığası (C ) arasında C . C eşitliği ile verilen bir
R
ili ki olduğunu
ilişki
ld
f k i Burada
farketti.
d sabiti,
bi i plakalar
l k l arasına konan
k
D
e
v
yalıtkan malzemenin dielektrik sabitidir ve birimsizdir. Hava ya
T
da boşluk içinL
A
= 1, bunun dışındaki yalıtkanlar için >1' dir.
O
Faraday deneylerini
iki farklı şekilde yapmıştır:
P
A
1. Sabit
bir gerilim altındayken (batarya bağlı iken), plakalar
F
A
T arasına yyalıtkan bir malzeme yerleştirmiştir
y ş
ş (Ş
(Şekil-a).
)
hava
S
U
R
D
.M
hava
2. Batarya bağlı değilken, plakalarındaki yük sabit iken,
plakalar arasına yalıtkan malzeme yerleştirmiştir (Şekil(Şekil b)).
(25-26)
Şekil - a : Sabit V Gerilimi Altındaki Sığa :
Plakalar arasında dielektrik malzeme yokken, plakalardaki
yük q ve plakalar arasındaki potansiyel fark V olduğundan,
kapasitörün sığası Chava q / V ile verilir. Faraday, plakalar
M
I
R
A
L
Y
LE
I
D
L
YI
yerleştirdikten
ş
sonra,, plakalardaki
p
arasına dielektrik malzeme y
yükün çarpanı kadar arttığını gözlemiştir (q q).
q κq
q
Bu yeni durumdaki sığa: C
κ κChava
V V
V
Şekil - b : q Yükünün Sabit Olduğu Durumda Sığa :
.
R
D
e
v
T
S
U
D
M
.
R
A
L
Faraday, bataryadan
izole edilimiş yükü sabit olan kapasitörün
O
Parasına dielektrik bir malzeme yerleştirdikten sonra,
plakaları
sonra
A
F arasındaki potansiyel farkın 1/ oranında azaldığını
plakalar
A
T
gözlemiştir
ö l i ti (V V / ).
q
q
q
Bu y
yeni durumdaki sığa:
ğ C
Chava
V V /
V
(25-27)
Bir bölge, dielektrik sabiti olan yalıtkan bir
malzeme ile tamamen kaplanmışsa, 0 terimini
M
I
R
I
içeren
ç
bütün elektrostatik eşitliklerde
ş
yyerine
D
L
I
Y
yazılmalıdır.
A
L
Y
E
Örneğin, dielektrik birLortamda
nokta yükün
.
R
elektrik alan ifadesi:
D
1 veq
E
.
4T
r
A
L
O
PDielektrik bir ortamda izele bir iletkenin
0
0
2
0
A
F
S
U
M
.
R
A
T
dışındaki elektrik alan ifadesi:
E
.
0
D
(25-28)
Örnek : Plaka alanı A ve plakaları arası uzaklığı d olan paralel
plakalı bir kapasitörün tam ortasına
ortasına, plakalarla aynı yüzey alanına
M
I
R
sahip, kalınlığı a olan yüksüz metal bir dilim konuyor.
I
D
aa) Kapasitörün yeni sığasını bulunuz.
L
b) Dilimin çok ince olması durumunda, sığanın içi hava dolu bir kapasitöre dönüştüğünü
YI
ve dilimin nereye konulduğunun önemsiz olduğunu gösteriniz. LA
Y
E iletken dilim eş-potansiyel
Dilim iletken olduğu için içindeki elektrik alan sıfırdır. Dolayısıyla,
L
.
yüzeydir. Dilimin dışında kalan bölgeler birbirine seri bağlı
iki kapasitör gibi düşünülebilir:
R
D
A
C
e
v
(d a ) / 2
A
1
1
1
d a d a d a
a )
a
C
T
A C
C C A
2 A 2 A A
d a
C
L
( d a ) / 2
O
P
A A
A
b ) a 0 durumda, C lim
(plakaları arası hava dolu paralel plakalı kapasitör)
F d a d
A
Dilimi, üst yüzeyi
ile üst plaka arasındaki mesafe b olacak şekilde yerleştirirsek:
T
S b d ba d a
A
1
1 U1
C
(a şıkkı ile aynı sonuç bulunur)
M
A
A
A
C .C C
d a
R
D
0
1
eş
eş
0
2
eş
1
0
2
0
0
1
2
0
0
0
a0
eş
eş
0
0
0
0
(25-29)
Örnek : Paralel plakalı bir kapasitör, kenar uzunluğu l olan ve
aralarında d mesafesi bulunan kare şeklinde iki paralel plakadan
oluşmuştur. Şekilde gösterildiği gibi, dielektrik sabiti olan bir
dilimin x kadarlık bir bölümü plakalar arasındadır.
M
I
R
I
D
L
YI
a ) Kapasitörün sığasını bulunuz.
b) Plakalar arasındaki potansiyel fark V ise, kapasitörde depolanan enerji ne kadardır?
A
L
Y
Ekalan boş kısım, birbirine
a ) Dilimin plakalar arasında kalan kısmı ile plakalar arasında
L
.
paralel bağlı iki kapasitör gibi düşünülebilir:
R
D
lx
e
C
v
l
l
d
C
C
C
x
l
x
1 x l
T
l (l x )
d
d
A
C
L
d
O
P l A
xA
0C
F
d
d
A
T x l C l A
S
d
d
U
l
1M
.
1 x l V
b ) U C V U
R
2d
D 2
0
1
eş
0
1
0
2
0
2
2
eş
0
0
2
eş
eşş
2
0
0
0
2
(25-30)
Örnek : Alanı A ve aralarındaki mesafe d olan paralel iki metal
M
I
R
plaka arasına, şekilde gösterildiği gibi, dielektrik sabiti , kalınlığı
d /3 ve plakalarla aynı yüzey alanına sahip olan dielektrik bir
I
D
L
YI
malzeme yerleştirilmiştir.
yerleştirilmiştir Bu şekilde oluşan kapasitörün sığasını
sığasını,
dielektrik malzeme konulmadan önceki sığa (C0 ) cinsinden bulunuz.
A
L
Y
E birbirine seri bağlı
Plakalar arasında dielektrikle dolu olan kısım ile boş olan kısım,
L
.
iki kapasitör gibi düşünülebilir:
R
D
A
C
e d 1 d 1 2
d
1
1
1
2d
v
d / 3
2
T
A C
C C
3AA 3 A 3 A
3 A
C
L
2 d / 3
O
P
3 A
C
d 2 1 FA
A
A
3
T
1 C
C
C
S
2
1
d
U
M
.
R
D
0
1
eş
0
2
eş
1
2
0
0
0
0
0
0
0
eş
0
(25-31)
Örnek : Alanı A ve aralarındaki mesafe d olan paralel iki metal
plaka arasına
arasına, şekilde gösterildiği gibi,
gibi dielektrik sabitleri 1 , 2
M
I
R
ve 3 olan dielektrik malzemeler yerleştirilmiştir.
I
D
L
YI
B şekilde
Bu
kild oluşturulan
l t l kkapasitörün
itö ü sığasını
ğ
bulunuz.
b l
A
L
Y sabiti
kapasitörler gibi değerlendirilebilir. Bu birleşik bölge de, E
dielektrik
L
bölge ile paralel bağlıymış gibi düşünülebilir.
.
R
A/2
D
C
e
d
v
1
1
1 T d
d
d
A / 2
A
C
C
C L
C
A A A
d /2
O
P
A/2
C
d / 2 FA
A
A T
A
C
C
C
C
S
2
dU
d
M
.
A 2
A
R
C
;
1
C
D
Dielektrik sabitleri 2 ve 3 olan malzemelerle dolu bölgeler birbirine seri bağlı
1
1
olan
1 0
2
2 0
3
2
23
3
3
2 0
3 0
0
2
3
3 0
0
2
3
2
0
d
1
0
eş
23
eş
2
1
23
3
2
2
1
2
1
3
2 2 3
2
3
1
2
3
3
3
eş
0
d
(25-32)
Örnek : Eş-merkezli iki iletken küresel kabuktan içtekinin yarıçapı a,
dıştakinin yarıçapı c' dir
dir. Şekilde gösterildiği gibi
gibi, kabuklar arasındaki
a r b bölgesi dielektrik sabiti 1 olan bir malzeme ile, b r c
M
I
R
I
D
L
YI
bölgesi dielektrik sabiti 2 olan başka bir malzeme ile doldurulmuştur.
Bu şekilde oluşturulan kapasitörün sığasını bulunuz.
A
L
Y
E birbirine seri bağlı iki
Küreler arasında farklı dielektrik malzemelerle dolu olan kısımlar,
L
.
kapasitör gibi düşünülebilir:
R
D
ab
C 4
e cb
1
1
1
1 b a c b
bv a
b a
T
b
bc
C
C C A 4 ab
b 4 bbc 4 b a
c
C 4
L
c b
O
ac ab
1
1 bc ac P
1 c (b a ) a ( c b )
A
4 b
4
C
ac
b
ac
F
A
4 T abc
C
S
c (U
b a ) a (c b )
M
4 abc
4 abc 4 ac
.
=
R 1 C
=
c (b a ) a (c b ) cb abb
ca
D
1
1 0
2
2 0
eş
2
eş
2
2
1
1
1
2
1
2
0
eş
1
1 0
2 0
1
2
0
2
1
2
1
0
1
2
2 0
1
eş
0
0
0
(25-33)
ÖDEV : Yarıçapları a ve b olan iki metal kürenin
merkezleri
k l i arasındaki
d ki uzaklık
kl k d' dir
di (d a ve b).
)
Şekilde gösterildiği gibi, kürelerin yükleri +Q ve
M
I
R
Q ise,
i sistemin
i t i sığasını
ğ
bulunuz.
b l
A
L
Y
LE
I
D
L
YI
Gauss yasası kullanılarak, küre merkezlerinin bulunduğu düzlemde ve
küreler arasındaki bölgede elektrik alan:
kQ
kQ
E 2
(pozitif yükten negatif yüke doğru)
2
r
(d r )
Burada r , negatif yüklü kürenin merkezinden olan uzaklıktır.
.
R
V V V
d a
b
A
L
O
P
D
e
v
T
d a
1
1
E dl kQ 2
dr cos180
2
r
d r
b
A
1
1 F 1
1
Q
V kQ
A
T
d
a
b
a
d
a
4
S
U
4
4
Q
C M
.
2 1 1 2
V
1 1
R
D a b d a a b d
0
2
1 1
a
b
d
a
0
0
(25-34)
ÖDEV : Paralel plakalı bir kapasitörün plakalarının kenar
uzunlukları L ve W,
W plakaları arasındaki mesafe ise d ' dir
dir.
Plakalar arasındaki bölge, şekilde gösterildiği gibi, köşeden
kö
köşeye
çizilen
i il hatla
h tl ikiye bölünmüş
bölü ü ve dielektrik
di l kt ik sabitleri
bitl i
1 ve 2 olan malzemelerle doldurulmuştur. Bu şekilde
oluşturulan
l t l kapasitörün
k
itö ü sığasını
ğ
bulunuz.
b l
dC1
.
R
1 0Wdx
d y
2 0Wdx
dC2
y
L
Ceş 0W
0
D
e
v
T
A
L
O
W
P
d
d
xA
FL
0
eş
1
1
2
L
1 1 2 x
2
ln
2
1 1 2 L 0
W U
S
C
M
ln
d.
R
D
1 2
1
1
A
T
0
A
L
Y
LE
I
D
L
YI
1
1
1
1 dy y
y d
;
x L
dCeş dC1 dC2 0Wdx 1
2
dx
1 2
d
1 2
1
M
I
R
2
1
; 1
2
Ceş
0W 2
0W
ln
1
d
d
(25-35)
Dielektrikler : Atomik Bakış
M
I
R
Dielektrikler,
i l k ikl "polar
l " ve "polar
l olmayan
l
" diye
di iki sınıfa
f
I
D
L
YI
ayrılır. Polar dielektrikler, elektrik alan sıfır olsa bile
yapılarındaki yük dağılımlarının simetrik olmayışından
dolayı sıfırdan farklı dipol momente sahiplerdir (H 2 O).
A
L
Y
Elektrik alan sıfırken dipollerin E
yönelimleri gelişigüzel
L
.
dağılım gösterir (Şekil
(Şekil-a )).RDüzgün bir E dış elektrik alan
D
e b), minimum enerji durumuna
uygulandığında (Şekilv
T
k l k geldiği
karşılık
ldiği
iiçin
i U p E di
dipoller
ll elektrik
l k ik alanla
l l
A
L
O
P edeler. Termal hareketlilik nedeniyle
aynı
y y
yönde yyönelmeyi
y tercih
y
A
F gerçekleşemez. Ancak, bu kısmi yönelim
bu yönelim tam A
olarak
T
S
kendisini oluşturan dış elektrik alanla zıt yönde bir iç elektrik alan
U
M
oluşturur.
Bu nedenle, net elektrik alan E dışardan uygulanan E
.
R
D
0
0
alanından daha zayıftır.
(25-36)
Polar olmayan dielektrikler, elektrik alanın olmadığı
M
I
R
durumda herhangi bir dipol momente sahip değildir
I
D
L
YI
(Şekil-a ). Plakaları arasında düzgün elektrik alanının
E 0 olduğu paralel plakalı bir kapasitörün p lakaları
arasına böyle bir dielektrik malzeme koyarsak,
koyarsak E 0
alanı kendisiyle aynı yönde yönelmiş bir p elektrik
dipol momenti indükler (Şekil(Şekil b ).
) Yönelen moleküller
.
R
A
L
Y
LE
D
ebir yük oluştu rmazlar. Ancak,
dielektriğin içinde net
v
T
dielektriğin plakalara
yakın yüzeylerinde net bir yük
A
L
O
P bu yyükler,, dipolün
birikimi oluşur.
ş İndüklenen
p
negatif
g
ve ppozitif uçlarından
ç
A
Foldukları plakanın yükü ile ters işaretlidir. Bu yükler,
kaynaklanır ve yakın
A
T
S
dielektriğin içinde
E ile ters yönde bir E elektrik alanı oluşturur (Şekil(Şekil c)
U
M
ve bunun
sonucunda da, kapasitörün plakaları arasındaki net elektrik alan E
.
R
daha
D zayıftır (E E / ).
0
0
(25-37)
Dielektriğin Varlığında Gauss Yasası :
M
I
R
T
Tamamen
dielektrikle
di l k ikl kaplı
k l bir
bi ortamda
d Gauss
G
yasası nasıll
I
D
L
YI
ifade edilir? Plakaları arası hava dolu olan paralel plakalı bir
kapasitörün (Şekil-a ) plakaları arasındaki bölgede elektrik
alan, Gauss yasasından,
q
q
E0 A
E0
0
0 A
.
R
A
L
Y
LE
D
e
v
Aynı kapasitörün plakaları arası dielektrik
sabiti olan bir yalıtkanla tamamen dolu
T
A
L
(Şekil-b) ise, dielektriğin plakalara
yakın yüzeylerinde indüklenen yük q olmak üzere:
O
q q
q P
q E q q
A
EA
E
F
A
A
A
T q
q
S
q q
E dA
U
M
.
R
sonucu
elde edilir.
edilir
D
ifadesine sahiptir.
0
0
0
0
0
(25-38)
q
Dielektriğin varlığında Gauss yasası:
E dA
0
M
I
R
I
D
L
Bu sonuç paralel plakalı kapasitör için türetilmiş olsa da, tüm diğer durumlar
YI için de
A
doğru
ğ ve geçerlidir.
gç
L
Y
E
L
.
Not 1:: Akı ifadesi
No
ades dielektrik
dee
sab
sabiti ' y
yı içermektedir.
çe e edR.
D
Not 2 : Dielektriğin varlığında yazılan Gauss e
yasasındaki q yükü kapasitörün yüküdür,
v
dielektrik malzemenin yüzeyindeTindüklenen yükle ilgisi yoktur
yoktur.
A
L
Not 3 : Gauss yüzeyinin her yerinde
sabit olmayabileceği genel durumu düşünülerek,
O
P içine alınmıştır.
dielektrik sabiti A
integral
alınmıştır
F
A
T
S
U
M
.
R
D
(25-39)
BÖLÜM-26
Akım ve Direnç
Bu bölüm kapsamında şağıdaki konulara yer verilecektir:
•
•
•
•
•
•
Elektrik akımı (i)
Elektrik akım yoğunluğu ( J )
Sürüklenme hızı (v d )
Bir iletkenin direnci (R) ve özdirenci (ρ)
Ohm yasası, ohmik ve ohmik olmayan iletkenler
Elektrik devrelerinde Güç
(26-1)
Elektrik Akımı :
Soldaki ilk resimde (Şekil-a), içinde ve yüzeyindeki her
noktanın aynı potansiyelde olduğu bir iletken verilmiştir.
İİletkenin içindeki serbest elektronlar gelişigüzel hareket
ettiklerinden, herhangi bir yönde net yük akışı yoktur.
İletkenin belirli bir noktadan kesilip araya bir batarya
koyduğumuzu
k
d ğ
varsayalım
l (Ş
(Şekilkil b). B
Bu son ddurumda
d A
ve B noktaları arasında, batarya gerilimine eşit, VA VB
potansiyel ffarkı
arkı oluşmuştur.
oluşmuştur Artık durum statik değildir
ve iletkenin içinde belirli bir doğrultuda net bir yük akışı
vardır İletkendeki bu net yük akışına,
vardır.
akışına "elektrik akımı"
denir.
(26-2)
Şekilde, bir bataryaya bağlı ve içinden akım geçen iletkenin
bi parçası görülmektedir.
bir
ö ül kt di aa ; bb veya cc ile
il gösterilen
ö t il
kesitlerden herhangi birisini ele alalım. Elektrik akımı i,
ilgili kesitten birim zamanda geçen yük miktarı olarak tarif
edilir. Başka deyimle, ilgili kesitteki yük akış hızı olarak bilinir. Matematik olarak:
dq
i
(C/s amper,
amper A)
dt
ifadesine sahiptir.
Akımın Yönü :
İletkenlerde akımın yönü okla ( ) gösterilir ve akımı oluşturan
yüklü parçacıkların işareti ile şu şekilde ilişkilidir:
1. Akım positive yüklerin hareketinden kaynaklanıyorsa, yönü
yüklerin v hızı ile aynı yöndedir
yöndedir.
2. Akım negative yüklerin hareketinden kaynaklanıyorsa, yönü
yüklerin v hızı ile ters yöndedir.
(26-3)
Akım Yoğunluğu : Akım yoğunluğu vektörel bir niceliktir ve
büyüklüğü,
büyüklüğü
i
J
(A/m 2 )
A
ile verilir. Akım yönüne dik olan birim kesitten geçen akım miktarı
olarak tarif edilir ve elektrik akımı ile aynı yöndedir. Bir iletkenden
geçen toplam akım, akım yoğunluğu (J ) cinsinden:
i J dA
ile verilir.
Akım yoğunluğu vektörel bir nicelik olduğu halde, akımın
kendisi skaler bir niceliktir
niceliktir. Yanda,
Yanda bir elektrik devresinden
bir parça verilmiştir. a noktasına gelen i0 toplam akımı, i1
ve i2 olam üzere ikiy
ye ayrılmıştır.
y
ş Yükün korunumu gereği
g ğ
i0 i1 i2 olacaktır. Dikkat edilirse, toplam akımı bulmak
için herhangi bir vektörel toplama işlemi yapılmamıştır.
(26-4)
Örnek : Yükü 8.0 nC olan bir nokta yük, çembersel bir yörüngede
100 rad/s' lik bir açısal frekansla dönmektedir. Nokta yükün bu
dönü hareketi nedeniyle oluşan akımı hesaplayınız.
2
2
2 f
= 0.02 s
T =
T
100
q
8.0 10 9
i=
i=
= 4.0 10 7 A
t
0.02
Ö
Örnek
: Kesit alanı 2 cm2 olan bir telden geçen yük q(t ) 4t 5 +5t +6 C
ile veriliyor. t 1 s anında telden geçen akımı ve teldeki akım yoğunluğunu
bulunuz.
dq
i (t ) 20t 4 5 i (1) 25 A
dt
25
i
5
2
1.25
10
A
/
m
J
A 2 10 4
i
(26-5)
Örnek : Bir telden geçen akım i(t ) = 100sin(120 t ) ifadesine
sahiptir. Burada, t saniye cinsinden ve akım amper cinsindendir.
t = 0 ile t = 1/240 s arasında telin kesitinden geçen toplam yük
miktarını bulunuz. Akımı oluşturan yüklü parçacıklar elektronlarsa,
bu kadar sürede telin kesitinden kaçç tane elektron ggeçmiştir?
ç ş
dq
i
dq idt 100 sin(120 t ) dt
dt
1/ 240
1
1/ 240
q 100 sin(120
( t ) dt 100
( t ) 0
cos(120
120
0
5
2 618 C
cos 2 1 6 = 2.618
2.618
19
9
N e 2.618
2 618 C N
1.64
1
64
10
tane elektron.
elektron
19
1.6 10
5
q
6
(26-6)
Sürüklenme Hızı (vd ) :
Bir iletkenden
Bi
il tk d akım
k geçmesi,
i elektrik
l kt ik alanın
l
etkisiyle
tki i l yüklerin
ükl i
belirli bir yönde akması anlamına gelir. Bu akış, "sürüklenme
hızı" dediğimiz ortalama bir vd hızıyla gerçekleşir.
hızı
gerçekleşir Yükler
iletken içinde gelişigüzel hareket etmeye devam ederken, aynı
zamanda da sürüklenirler.
Şekilde kesit alanı A olan bir iletken verilmiştir. Akımı oluşturan yüklü parçacıkların
elektronlar ve iletkenin birim hacmindeki serbest elektron sayısının
y
da n olduğunu
ğ
varsayalım.
İletkenin L uzunluğundaki bir parçasındaki toplam yük:
q nAL e ile verilir ve bu bölgedeki tüm yük t L / vd kadarlık bir sürede A
kesitinden geçer. Bu durumda iletkenden geçen akım ve iletkendeki akım yoğunluğu:
i
q nALe
i nAvd e
nAvd e ; J
nevd
t L / vd
A
A
Akım yoğunluğu
Ak
ğ l ğ ile
il elektronların
l k
l
hızı
h ters yönlü
ö lü olduğundan
ld ğ d
J nevd şeklinde yazılır.
(26-7)
Örnek : Kesit alanı 3.31106 m 2 olan bakır bir telden 10 A şiddetinde
akım geçmektedir. Her bir bakır atomunun elektronlarından sadece birisi
akımın oluşumuna katkı verdiğine ve bakırın yoğunluğu 8.95 g/cm3
olduğuna göre
göre, elektronların sürüklenme hızını hesaplayınız.
hesaplayınız (Bakırın
molar kütlesi: 63.5 g/mol).
m 63.5
1 mol bakırın hacmi: V =
=7.09 cm 3
d 8.95
1 moll bakırda
b k d 66.02
02 10 23 tane bakır
b k atomu olduğuna
ld ğ
göre,
ö
elektron yoğunluğu:
6.02 10 23
28
3
8.49
10
elektron/m
n
7.09 10 6
J
I
10
vd
ne neA 8.49 10 28 1.6 10 19 3.31 10 6
vd 2.23 10 4 m / s
(26-8)
Direnç :
Bir iletkenin iki ucu arasına, şekildeki gibi, V potansiyel farkı
uygulanırsa o iletkenden i akımı geçer. Direnç, bir iletkenin
içinden geçen akıma, başka deyimle içindeki yük akışına karşı
gösterdiği tepki ya da karşı koyuşun bir ölçüsüdür. M atematik
olarak:
V
R
(V/A ohm, )
i
eşitliği ile verlir. Elektrik devrelerindeki sembolik gösterimi
şekil-b'de verilmiştir.
Özdirenç
Ö
d e ç ( ) :
Durgun elektriğin tersine, iletkenin içinde elektrik alan artık sıfır değildir. İletkenin
içindeki elektrik alan iletkendeki akım yoğunluğu ile doğru oratılıdır ve orantı sabitine
de o iletkenin "özdirenci" denir (E J ). SI sistemindeki birimi:
E
V/m V
E J
m
m
.
2
J
A/m A
(26-9)
İletkenlik ( ) :
İletkenlik özdirencin tersidir ( 1 / ) ve birimi
( m) 1 ' dir. Bir iletkenin elektriği ne kadar iyi
ilettiğinin bir ölçüsüdür. Elektriği iyi iletebilen
malzemelerin iletkenlikleri de o denli büyüktür.
Böylece, akım yoğunluğu ile elektrik alan arasındaki eşitlik,
Böylece
eşitlik iletkenlik cinsinden,
cinsinden
J E
formunda da yazılabilir.
yazılabilir Yukarıdaki iletkenin içindeki elektrik alan ile iletkendeki
akım yoğunluğu birlikte değerlendirilirse, bir iletkenin direnci (R) ile özdirenci ( )
arasında
arasında,
V
E
E V/L V A
A
L
R
i
J i/ A i L
L
J
A
ile verilen bir ilişki olduğu ortaya çıkar.
L
R= ρ
A
(26-10)
Örnek : Kesit alanı 2.00 104 m 2 ve uzunluğu 10.0 cm silindirik bir aliminyum
telin direncini hesaplayınız.
hesapla ını Aynı
A nı boyutlara
bo tlara sahip,
sahip ööz-direnci
direnci 3.00
3 00 1010 m olan
cam bir silindir için yukarıdaki hesabı tekrar yapınız. ( Al 2.82 108 m)
R
L
A
R Al Al
L
01
0.1
2.82 10 8
4
A
2.00 10
Rcam cam
5
1.41
10
L
0.1
13
3.00
3 00 1010
1.50
1
50
10
4
A
2.00 10
Örnek : Yarıçapı 0.321
0 321 mm olan nikromdan yapılmış telin birim uzunluğunun
direncini hesaplayınız. 1 m uzunluğundaki nikrom telin uçları arasınan 10 V' luk
bir potansiyel fark uygulanırsa
uygulanırsa, teldeki akım ne olur? ( Ni Cr 1.15
1 15 106 m)
A r 0.321 10
2
3 2
3.24 10 7 m 2
R
1.5 10 6
4.6 /m
7
L A 3.24 10
V
10
2.2
I
22A
R
4.6 (1)
(26-11)
Örnek : Farklı malzemelerden yapılmış, kenar uzunluğu
3 mm olan kare kesitli iki tel şekildeki gibi birleştirilmiştir.
Birinci tel 25 cm uzunluğunda ve öz-direnci 4 105 m,
ikincisi
iki
i i ise
i 40 cm uzunluğunda
l
d ve öz-direnci
di
i 6 105 m'dir.
di
Birleşik telin toplam direncini hesaplayınız.
R
L
A
L
0.25
10
4 10 5
3 2
A
9
3 10
L
0.40
24
RB B 6 10 5
2
A
3 10 3 9
RA A
Teller birbirine eklendiği için, toplam direnç:
R R A RB
10 24 34
3.78
9
9
9
(26-12)
Örnek : Şekilde, iç iletkeninin yarıçapı a 0.5 cm, dış iletkeninin
yarıçapı b 1.75 cm ve uzunluğu L 15 cm olan koaksiyel bir kablo
verilmiştir. Koaksiyel kablolar, akım kablo boyunca akacak şekilde
tasarlanırlar. İletkenler arası bölge, akım kaçaklarını önlemek için
tamamen silikonla kaplanır.
kaplanır İki iletken arasındaki silikonun direncini
hesaplayınız. İletkenler arasına 12 V' luk bir potansiyel fark uygulanırsa,
kaçak
ç akım miktarı ne kadardır? ( Si 640 m))
Kablodaki kaçak akım yönü radyal doğrultudadır. Yani, iç iletkenden
dış iletkene doğrudur. Kablo ile aynı eksenli ve aynı boyda, yarıçapı
r ve kalınlığı dr olan silindirik bir kabuğun direnci:
L
dr
dR
A
2 rL
ifadesine sahiptir. Dolayısı ile silikonla kaplı bölgenin toplam direnci ve kaçak akım:
R
b
b
dr
dr
640
b
1.75
R
ln
R
ln
851
2 rL 2 L a r
2 L a
2 (0.15) 0.5
a
V
12
14.1 mA
R 851
olarak bulunur.
I
(26-13)
Örnek : Şekilde öz-direnci , uzunluğu L, iç yarıçapı ra ve dış
yarıçapı rb olan silindirik bir kabuk verilmiştir
verilmiştir. Silindirin iki ucu
arasına gerilim farkı uygulandığında, akım silindir ekseni boyunca
akmaktadır. Bu uçlar arasında silindirin direncini bulunuz.
akmaktadır.
Silindir ile aynı eksenli ve dL uzunluğundaki bir kesitin direnci:
L
dL
dR
R
A
b2 a 2
ifadesine sahiptir. Silindir ekseni boyunca bu dirençleri üst üste toplarsak,
toplam direnç:
L
L
dL
L
R
dL
2
2
2
2
2
2
b
a
b
a
b
a
0
0
olarak bulunur.
(26-14)
Örnek : Şekilde, ön yüzeyinin (A) kesiti aw, arka yüzeyinin
kesiti bw olan L uzunluğuna ve öz-direncine
öz direncine sahip bir cisim
verilmiştir. Bu cismin A ve B yüzeyleri arasındaki direncini
bulunuz.
A yüzeyine paralel ve x kadar uzakta, kalınlığı dx olan bir
plakanın direnci:
L
dx
dx
ba ya
R
dR
;
A
wy w b a
L
x
x
a
L
ifadesine sahiptir. A yüzeyinden B yüzeyine kadar bu dirençleri üst üste
toplarsak,
rsak toplam direnç:
L
dx
L
b a
L
b
ln
ln
x
a
w 0 b a
w b a L
w
b
a
a
0
x
a
L
olarak bulunur.
R
L
(26-15)
ÖDEV : Şekilde, tabanının yarıçapı b ve tavanının yarıçapı a
olan h yüksekliğine ve öz
öz-direncine
direncine sahip kesik koni şeklinde
bir cisim verilmiştir. Bu cismin tavanı ile tabanı arasındaki
direncini bulunuz.
Tavan yüzeye paralel ve z kadar uzakta, kalınlığı dz olan bir
plakanın direnci:
L
dz
dz
ba ya
R
dR
;
2
2
y
b a
L
z
A
L z a
ifadesine sahiptir. Tavan yüzeyinden taban yüzeyine kadar bu
dirençleri üst üste toplarsak,
dirençleri
toplarsak toplam direnç:
L
L
dz
L
1
L
R
2
b
a
0 b a
ab
b
a
z
a
L
L z a
0
olarak bulunur.
(26-16)
Özdirencin Sıcaklıkla Değişimi :
Şekilde
Ş
kild bakırın
b k
ö di
özdirencinin
i i sıcaklıkla
kl kl
nasıl değiştiği verilmiştir. Bu değişim
neredeyse çizgiseldir ve birçok iletken
için
ç benzerdir.
Birçok pratik uygulamalarda, özdirencin sıcaklığa bağlılığı matematiksel
olarak,
l k
0 1 T T0
bağıntısı ile verilir. Buradaki sabitine "özdirencin sıcaklık katsayısı"
ğ ((293 K)) ve 0' da iletkenin oda
denir. T0 kelvin cinsinden oda sıcaklığı
sıcaklığındaki özdirencidir. Örneğin, bakırın oda sıcaklığındaki
özdirenci: o 1.69
1 69 108
m' dir.
dir
(26-17)
Örnek : Bir ampülün içindeki tungsten telin direnci, ampül yanmıyorken
(T0 = 20 o C) 19 , yanıyorken
anı orken 140 ' ddur.
r Ampül yanıyorken
anı orken sıcaklığı ne
kadardır? ( tungsten = 4.5 103 ).
0 1 T T0 ; R
R R0 1 T T0
R
1
1 T0
T
R
0
L
A
1
140
1
20 1435 o C
T
3
4 5 10
19
4.5
(26-18)
Ohm Yasası :
Şekil-b' de bir direnç üzerinden geçen i akımının, direncin uçları arasındaki V potansiyel
farkına bağlı değişimi verilmiştir. Akım-gerilim (i -V eğrisi) karakteristiği denilen bu eğri,
orijinden geçen bir doğrudur. Bu tür iletklenlere "Ohmik" iletkenler adı verilir ve ohm
yasasına uyarlar.
l Tanım
T
olar
l akk ohm
h yasası: "Bir
Bi iletkenden
il tk d geçen akım,
k sabit
bit bir
bi sıcaklıkta,
kl kt
iletkenin iki ucu arasındaki potansiyel farkla doğru orantılıdır". Her iletkenohm yasasına
uymaz Bu tür iletkenlere "Ohmik olayan" iletkenler diyoruz.
uymaz.
diyoruz Örnek olarak
olarak, şekilşekil c' de
yarı-iletken bir diyotun akım-gerilim karakteristiği verilmiştir. Görüldüğü gibi V / i ( R)
oranı sabit değildir. Üstelik, gerilim ters çevrildiğinde diyot akımı iletmez.
(26-19)
Ohm Yasasına Mikroskopic Bir Bakış:
Neden
N
d bbazı cisimlerin
i i l i ohm
h yasasına uyduğunu
d ğ
anlamak
l
k
için, iletimin nasıl gerçekleştiğine atomik düzeyde bakmak
gerekir Örnek olarak
gerekir.
olarak, bakırda iletimin nasıl gerçekleştiği
yandaki şekilde gösterilmiştir. İletken içindeki serbest
elektronların gelişigüzel hareketleri yaklaşık olarak
106 m/s mertebesindeki hızlarla olur ve sürekli olarak
bakır atomlarıyla
y ççarpışırlar.
pş
Serbest elektronun bir iletken içindeki A ve B noktaları arasında izlediği yol
yukarıdaki
k d ki şekilde
kild grii kesikli
k ikli çizgilerle
i il l gösterilmiştir.
ö t il i ti Düzgün
Dü ü bir
bi E elektrik
l kt ik
alanı uygulandığında, elektronun izlediği yol ise aynı şekil üzerinde yeşil renkte
kesikli çizgilerle gösterilmiştir.
gösterilmiştir Elektriksel kuvvetin etkisiyle
etkisiyle, elektron sağa
doğru küçük bir vd sürüklenme hızı kazanmış ve B noktasına ulaşmıştır.
(26-20)
İletken içindeki serbest elektronlardan sadece birini düşünelim. Ardışık çarpışmalar arasında
geçen ortalama süre olsun. Üzerinde etkiyen elektriksel kuvvet elektron ivme kazanır:
F eE
F eE a
m m
Her çarpışmada elektronun tüm kinetik enerjisini kaybettiğini varsayarsak, elektronun
sürüklenme hızı,
eE
((Eş-1)
ş )
vd a
m
olur. J akım yoğunluğuna sahip bir iletkende elektronların sürüklenme hızı,
J
J nevd vd
(Eş 2)
(Eş-2)
ne
eşitliği ile verilir. Bu iki eşitlik birleştirilirse,
J
eE
m
E 2 J
ne
m
ne
sonucu elde edilir. Bu son eşitlikten:
m
E J 2
ne
bağıntısı elde edilir. Eğer elektrik alana bağlı değilse, iletkenin özdirenci değişmez ve
ohm yasası ile uyumludur.
vd
(26-21)
Elektrik Devrelerinde Güç:
Şekilde verilen elektrik devresini düşünelim. Bir
cihazın (direnç, motor, ...) a ve b uçları arasına
batarya ile V gerilimi uygulanmıştır. Devreden
geçen i akımı nedeniyle cihazın bir ucundan
diğerine
diğ
i dt
d kadarlık
k d l k bir
bi zamanda
d dq
d id
idt kadar
k d
bir yük geçer.
Potansiyel enerjideki azalma dU Vdq Vidt kadardır. Bu enerji batarya
tarafından cihaza aktarılır. Bataryadan
y
cihaza enerji
j aktarılma hızı "g
güç"
olarak tanımlanır ve
dU Vidt
P
P iV (V A watt,
t W)
dt
dt
ifadedine sahiptir.
Ohmik bir direnç üzerinde açığa çıkan güç ifadesinde V iR eşitliği kullanılarak
P iV i 2 R V 2 / R olarak yazılabilir.
(26-22)
Örnek : Direnci 8 olan nikrom bir telin uçları arasına 120 V' luk bir
poatnsiyel
i l fark
f k uygulanarak
l
k bir
bi elektrik
l k ik ısıtıcısı yapılıyor.
l
Telden
T ld geçen
akımı ısı üretilme hızını bulunuz.
V 120
15 A
R
8
P i 2 R (15) 2 8 1800 J/s
i
Örnek : 240 V' luk bir gerilim altında çalışan ve 20 A akım çeken bir fırında
4 saat boyunca pişirilen bir yemek için ödenecek elektrik parası ne kadardır?
(elektriğin kW-saat' i 15 kuruştur).
P iV 20 240 4800 W 4.8 kW
Enerji W P t 4.8 4 19.2 kW-saat
Tutar 19
19.22 15 288 kuruş 2.88
2 88 TL
(26-23)
BÖLÜM-27
BÖLÜM
27
Devreler
M
I
R
A
L
Y
LE
Bu bölümde aşağıda listelenen konulara değinilecektir:
I
D
L
YI
Elektromotor kuvvet (emk)
Gerçek ve ideal emk kaynakları
Kirchhoff’ un çevrim kuralı
Kirchhoff’ un kavşak kuralı
Kirchhoff
Çok halkalı devreler
Seri bağlı dirençler
Paralel bağlı dirençler
Bir kapasitörün dolması ve boşalması, RC devresi
.
R
A
F
S
U
A
L
O
P
D
e
v
T
A
T
M
.
R
D
(27-1)
Bir iletkende akımın sürekli olması için, iki ucu arasına potansiyel
M
I
R
fark uygulamak gerekir. İletken içinde oluşan elektrik alan, sürekli
I
D
L
I cihaza
arasında sürekli bir potansiyel fark oluşturmaya yarayan
Y
"emk kaynağı" adı verilir. Bir üretecin emk' sı,
elektromotor kuvvet
A
L
Y
kaynağı tarafından yük taşıyıcıları üzerine birim yük başına
yaptığı iş ( = dW / dq)
E
L
.
olarak tanımlanır. Birimi J/C veya volt' tur. Batarya, pil, akü birer emk kaynağıdır.
R
D
Bu cihazlar sanki bir "yük pompası" gibi çalışırlar.
Potansiyelin düşük olduğu uçtan
e
v
potansiyelin yüksek olduğu uca doğru sürekli olarak yük pompalarlar. Aşağıdaki
T
A
şekilde, sistemin mekanik eşdeğeri
verilmiştir. Buradaki pompa, suyu alçaktaki bir
L
O
depodan
p P yyüksekteki başka
ş bir depoya
p y pompalamaktadır
p p
ve
A
Felektrik devresindeki emk kaynağına karşılık gelir. Depolar
A
T arasındaki boru elektrik devresindeki direnci, depolar da
S
U
direncin yüksek ve düşük potansiyele sahip uçlarını temsil
M
.
etmektedir.
R
D
olarak bir ucundan diğerine yük pompalar. Bir iletkenin iki ucu
(27–2)
Bir emk kaynağının kutbu, bir ucunda küçük çember olan bir
okla gösterilir. Okun yönü kaynağın negatif ucundan pozitif
M
I
R
I
D
L
YI
ucuna doğrudur. Bir devreye bağlandığında, kendi içindeki
pozitif yükler negatif uçtan pozitif uca doğru akar ve devrede
yük akışı
ş oluşmasına
ş
sebepp olur. Bunu y
yaparken
p
dq
q
de bir y
A
L
Y
E bir iş yapar. Kaynağın
yükü üzerinde dW dq ile verilen
L
.
batarya olması durumunda,Rgerekli enerji batarya için
içindeki
deki
D
kimyasal reaksiyonlardan;
jeneratör olması durumunda, mili
e
v
T
çeviren mekanik
kuvvetten; güneş pili olması durumunda da
A
L
güneşten
sağlanır. Yandaki devrede, B kaynağında depolanmış
O
P enerji form değiştirir.
kimyasal
değiştirir Bir kısmı motorda mekanik
A
F
S
U
M
.
R
A
T
enerjiye, bir kısmı direnç üzerinde ısıya ve kalan kısmı da A
ka nağında kimyasal
kaynağında
kim asal enerji
enerjiyee dönüşür.
dönüşür
D
(27–3)
Yandaki devrede (Şekil-a), R direnici bir emk kaynağının
a ve b uçlarına bağlıdır.
İdeal Batarya :
S
U
M
.
R
M
I
R
I
D
L
YI
A
L
Y
E
L
a ve b uçları arasındaki V gerilimi,
üzerinden geçen i akımına
.
b ğl ddeğilse
bağlı
ğil emkk kaynağı
k
ğD
idealdir
id Rldi (V ) denir
i (Şekil(Ş kil b).
)
e
v
T
A
Gerçek Batarya:
L
O
P
A
F b uçları arasındaki V gerilimi, üzerinden geçen i akımıyla
a ve
A
T
azalıyorsa emk kaynağı gerçektir (V ir) denir (Şekil-c).
)
Bu ifadedeki r, emk kaynağının "iç direnci" dir.
D
(27–4)
Tek Halkalı Bir Devredeki Akım:
M
I
R
Şekilde tek halkalı bir devre verilmiştir. Kaynağın ideal ve bağlantı
p olduğunu
ğ
varsayalım.
y
kablolarının ihmal edilebilir dirence sahip
I
D
L
I
Y
Devrede saat ibreleri yönünde bir i akımı akar.
A
L
Y
E
L
dt kadarlık bir zamanda devreden dq idt kadarlık bir yük
akar. Bu durumda batarya
.
R
d ddq idt
dW
d ifadesi
if d i ile
il verilen
il bir
bi iş
i yapar. Enerjinin
ji i korunumu
k
gereğii bu
b enerji
ji
D
e
direnç üzerinde ısı enerjisi olarak açığa çıkar:
v
T
A
L
idt Ri dt Ri iP
RO
0
A
F
A
Bu son eşitlik, Kirchhoff'
un çevrim kuralı olarak bilinir. Daha açık bir ifadeyle;
T
S
"Bir elektrikUdevresindeki herhangi bir çevrim boyunca tüm elemanlar
M potansiyel değişimlerinin toplamı sıfırdır".
üzerindeki
.
R
D tarif edilebilir.
şeklinde
2
(27-5)
Örnek : İç direnci r = 0.25 ve emk' sı = 13 V olan bir batarya,
R = 3 ' llukk bir
bi direncin
di
i uçlarına
l
b ğl
bağlanmıştır.
t
M
I
R
a ) Devreden geçen akımı ve bataryanın çıkış gerilimini
b) Bataryanın devreye sağladığı gücü, dirençler üzerinde
birim zamanda açığa çıkan ısı enerjisini hesaplayınız.
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
13
a ) i
4A
r R 0.25 3
V = iR = 4 3 12 V veya V = ir
i = 13 4 0.25
0 25 12 V
b ) Pbatarya i 4 13 52 W
A
L
O
P
A
P = i R = 4 F 3 48 W
A
T
S
P =i U
r = 4 0.25
0 25 4 W
M
.
R
R
r
2
2
2
2
D
(27-6)
Örnek : İçç direnci r ve emk' sı olan bir batarya,
y , şşekildeki
gibi R direncinin uçlarına bağlanmıştır. Hangi R direncinde,
g ç maksimum olur?
üzerinden ççekilen güç
Pi R
2
2R
i
P
2
rR
r
R
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
r R 2 r RT
R
dP
A = 0 r R 2R 0 R r
=0
L
dR
r RO
P
A
R
F
P
A
r RS
T 4r
U
M
.
R
D
2
2
4
2
max
2
2
Rr
(27-7)
Direnç Kuralı :
V iR
V iR
V
A
F
A
T
V
S
U
M
.
R
M
I
R
Bir direnç üzerinden geçen akımla aynı yönde hareket
I
D
L
YI
ediyorsak, direnç üzerindeki potansiyel değişimi:
V iR
Bir direnç üzerinden geçen akımla ters yönde hareket
A
L
Y
ediyorsak, direnç üzerindeki
potansiyel değişimi:
E
L
V iR
.
R
D
e:
v
EMK Kuralı
T
İ
İdeal
bir
kaynak
üzerinde, emk'' nın yönünde
ö ü
hareket
A
L
ediyorsak,
kaynak üzerindeki potansiyel değişimi:
O
PV
İdeal bir kaynak üzerinde, emk' nın tersi yönde hareket
ediyorsak,
di
k kaynak
k
k üzerindeki
ü i d ki potansiyel
t i l ddeğişimi:
ği i i
V
D
(27-8)
M
I
R
I
D
L
YI
A
L
Ş kil a' da
Şekild verilen
il ddevreyii ele
l alalım.
l l Batarya, r iç
i dirençli
di
li Y
gerçekk bir
bi bataryadır.
b
d
E
L tam bir tur atarak
Bu çevrim için, a noktasından başlar ve saat ibreleri.yönünde
R
Kirchhoff' un çevrim kuralını uygularsak:
D
e
v
ir iR 0 i
T
Rr
A
L
buluruz.
O
P
A
F b noktasına saat ibreleri yönünde giderken çevrimin
A
Şekil-b' de, a noktasından
T
S
h noktasındaki
her
k
d ki V potansiyeli
i li çizilmiştir.
i il i i Batarya üzerinde
i d negatif
if uçtan pozitif
i if
U
M için, V potansiyel değişimi pozitiftir. Akımla aynı yönde hareket
uca gittiğimiz
.
R
ettiğimiz
D için, her iki direnç üzerindeki V potansiyel değişim negatiftir.
(27-9)
Örnek : Şekilde iki batarya ve iki dirençten oluşan tek
halkalı bir devre verilmiştir. Bataryaların iç direçleri
ihmal edilebilir. Devreden geçen akımı, dirençlere
aktarılan güçleri ve 12 V' luk bataryanın devreye
sağladığı gücü hesaplayınız.
M
I
R
I
D
L
YI
A
L
Y
E
6 L12
1
V 0 8 I 10 I 0 I R.18 3 A
D
Negatif işaret, akımın ters yönde aktığını
göstermektedir.
e
v
8 AT
1
P I R 8 L0.89 W
9
O
3
P
10
1 FA
P I R A 10
1.11 W
9
T 3
S
U
1
M
P .I 12 4 W
3
R
D
1
2
2
R1
2
1
2
R2
2
2
2
2
(27-10)
Çok Halkalı Devreler:
M
I
R
Şekilde iki halkalı bir devre verilmiştir. Bu devre bad, bdc
I
D
L
YI
ve bd olmak üzere üç kolludur. Her koldan geçen akıma bir
isim verilir ve keyfi bir yön seçilir. Yapılan işlem sonucunda
A
L
Y
E seçtiğimizi bildirir.
akımın yönünü başlangıçta yanlış
L
.
R
Yukarıdaki devrede bad,
bad bdc ve bd kollarından
geçen akımlara sırasıyla
D
e seçilen yönler devre üzerinde
i , i ve i isimleri verilmiş ve akımlar v
için
gösterilmiştir.
ö il i i b ve d noktaları
k l birer
biATkkavşaktır.
k Yükün
ü kkorunumu gereği,
ği
L
O
d noktasına gelen i ve i akımlarının
toplamı i akımına eşittir (i i i ).
P
A
Bu, Kirchhoff' un kavşak
kuralı olarak bilinir ve daha açık bir ifadeyle;
F
A
"Bir kavşağa gelen
akımların toplamı, o kavşağı terkeden akımların
T
S
toplamınaUeşittir".
M
.
şşeklinde
tarif edilir.
R
D
akım için negatif
g bir değer
ğ bulunabilir. Bu durum bize, ilgili
g
1
2
3
1
3
2
1
3
2
(27-11)
Devredeki i1 , i2 ve i3 akımlarını belirlemek için üç
M
I
R
denkleme ihtiyacımız vardır. Bunlardan birincisi,
I
D
L
YI
d noktasına uygulanan kavşak kuralından bulunur:
i1 i3 i2
(Eş-1)
A
L
Diğer iki tanesi de, bad ve bdc halkaları için saat ibrelerinin
tersi yönünde
Y
E
hareket edilerek Kirchhoff' un çevrim kuralının uygulanmasıyla
bulunur:
L
.
bad için: i R i R 0
(Eş-2)R
D
e
bdc için: i R i R 0
(Eş-3)
v
Tö ü ü d devredeki
Ü bilinmeyenli
Üç
bili
li bu
b üç
ü denklemin
d kl i Açözümünden,
d
d ki i , i ve i akımları
k l
L
bulunabilir. Herhangi bir akımın
değerinin negatif bulunması, ilgili akım için
O
P
başlangıçta seçilen yönün
yanlış olduğu anlamına gelir. abcd halkası için de
A
F
A
çevrim kuralı uygulanarak
dördüncü bir eşitlik daha bulunabilir. Ancak, bu
T
S yeni bir bilgi vermez. Bu yeni eşitlik,
yeni eşitlikU
bize
M i R i R 0
abcd. için:
(Eş-4)
R
Dverilir ve Eş-2 ile Eş-3' ün toplamından başka birşey değildir.
ile
1
1 1
3
3
3
2
3
2
2
1
1
1 1
2
2
2
3
2
(27-12)
Örnek : Yanda verilen devrenin kollarından geçen
M
I
R
I1 , I 2 ve I 3 akımlarını,
k l
Ki
Kirchhoff'
hh ff' un çevrim
i ve kavşak
k
k
kurallarını kullanarak bulunuz.
A
L
Y
LE
I
D
L
YI
Kirchhoff un çevrim ve kavşak kurallarından,
Kirchhoff'
abcf halkası için: 12 I1 3 I1 5 I 2 I 2 4 0 2 I1 3 I 2 4
(Eş-1)
.
fcde halkası için: 4 I 5 I 8 I 0 3 I R4 I 2 (Eş-2)
D
e
c kavşağı için: I I I (Eş-3)
v
Eş 1 ve Eş-2'
Eş-1
Eş 2' den,
den I ve I çekilipA
Eş-3'
EşT3' te yerine konursa
konursa,
L
6
17
11
O
AI
A
A
I
I
P
13
13 A
13
F başlangıç yönleri doğru, I akımının başlangıç
bulunur. I ve I akımlarının
A
T
S
yönü
önü ise ters seçilmiştir
seçilmiştir.
U
M
.
R
D
2
1
2
1
2
1
1
3
2
3
2
3
3
3
3
2
(27-13)
ÖDEV : Kirchhoff' un çevrim ve kavşak kurallarını
kullanarak, yanda verilen devredeki tüm dirençlerden
geçen akımları
k l bulunuz.
b l
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e kurallarını
ÖDEV : Kirchhoff' un çevrim ve kavşak
v
T
kullanarak yanda verilen devredeki
kullanarak,
tüm dirençlerden
A
L
geçen akımları bulunuz. 200O
' luk direncin uçları
P
arasındaki
d ki potansiyel
i l ffarkı
k hhesaplayınız.
l
A
F
A
T
S
U
M
.
R
D
(27-14)
Bir Devrede İki Nokta Arasındaki Potansiyel Fark :
Şekildeki
Şek
ildeki tek halkalı devreyi ele alalım.
alalım b ve a noktaları
M
I
R
I
D
L
k
d b noktasına
k
h kI ederken,
hareket
d k
a noktasından
Y
V V tüm elemanlar üzerindeki A
V potansiyel
L
değişimlerinin toplamıY
E
L
.
işlemiyle bulunur.
R
D
a noktasını b noktasına bağlayan iki farklıeyol bulunmaktadır. V V potansiyel
v
T
farkını her iki yönde de hareket ederek
bulabiliriz:
A
L
Saat ibreleri yönünde
:
V V ir
O
P
S t ibrelerinin
Saat
ib l i i ter
t sii yönünde
ö ü d : V V iR
A
F
A
Not -1 : Bu devreTiçin Kirchhoff' un çevrim kuralı uygulanırsa, ir iR 0
S
bulunur.
Bu da, ir iR anlamına gelir.
U
M
Not - 2.: İki nokta arasındaki potansiyel fark yoldan bağımsızdır.
R
D
arasındaki Vb Va potansiyel farkı,
b
a
b
b
a
b
a
a
(27-15)
Örnek : Şekilde iki halkalı bir devre verilmiştir. Devredeki
kollardan geçen I1 , I 2 ve I 3 akımlarını bulunuz. a ve c
noktaları arasındaki potansiyel farkını (Vca Vc Va ) üç farklı
yolu takip ederek hesaplayınız.
M
I
R
I
D
L
YI
A
L
Y
LE (Eş-1)
Kirchhoff'
c o un
u çevrim
çev
ve kavşak
avşa kurallarından,
u a a da ,
abcd halkası için: 10 6 I1 2 I 3 0 3 I1 I 3 5
.
bcfe halkası için: 10 6 I 14 4 I 0 3 I R
2 I 12 (Eş-2)
(Eş 2)
D
c kavşağı için: I I I (Eş-3)
e
v
Eş-1
Eş
1 ve Eş
Eş-2'
2 den,
den I ve I çekilip Eş
Eş-3'
3 te yerine konursa,
konursa
T
A
L
1A
I 2 A I 3 A I O
P yönü doğru
bulunur I akımının başlangıç
bulunur.
doğru, I ve I akımlarının başlangıç
A
F
yönleri ise ters seçilmiş.
A
T
adc yolu: V 2SI V V V 2 I 2( 1) 2 V
U
abc yolu:M
V 10 6 I V V V 10 6 I 10 6(2) 2 V
.
abefcR
D yolu: V 4 I 14 V V V 14 4 I 14 4(3) 2 V
1
1
2
2
3
3
1
c
3
a
1
a
2
3
2
a
1
3
2
1
2
2
c
c
a
3
c
c
a
c
1
a
2
(27-16)
Örnek : Şekilde iki halkalı bir devre verilmiştir. be kolundan geçen I 3
akımı 2 A olduğuna göre
göre, diğer kollardan geçen I1 ve I 2 akımını,
akımını af kolu
üzerindeki bataryanın emk' sını bulunuz. a ve d noktaları arasındaki
M
I
R
I
D
potansiyel farkını (V V V ) üç farklı yolu takip ederek hesaplayınız
hesaplayınız.
L
YI
A
Kirchhoff' un çevrim ve kavşak kurallarından,
L
Y
befa halkası için: 5 I 2 I 0 2 I 10
(Eş-1)
E
L
5
bedc halkası için: 5 I 15 7 I 0 7 I 15 10 .I A
R
7
D
b kavşağı için: I I I 2 (Eş-2)
e
v
5
9
I ' iin ddeğeri
ğ i Eş-2'
E 2' dde kkullanılırsa:
ll l
I IAT
2 I 2( ) A
7
7
L
9
88 O
2 I 10 10 2(( ) P V bulunur.
7A 7
F
9 88
A
afed yolu: V 2 I V V V 2( )
10 V
T
7
7
S
abed yolu: V U
5 I V V V 5(2) 10 V
M
5
.
abcd R
yolu: V 7 I 15 V V V 7( ) 15 10 V
7
D
da
d
a
3
2
3
1
2
2
1
1
1
3
1
1
2
2
2
a
d
2
a
3
a
1
d
d
d
d
a
a
d
a
(27-17)
Eşdeğer Direnç:
M
I
Yanda, birbirine farklı şekilde bağlanmış üç adet
R
I
D
dirençten oluşmuş bir devre verilmiştir.
verilmiştir Üç
adet
L
I
Y
direnç içeren bu gruba elektriksel olarak
eşdeğer
A
L
Y
tek bir direnç R bağlayabiliriz.
Bunun anlamı,
E
L
.
şşekil-a' da dirençç grubunun
g R uçları
ç
arasına uygulanan
yg
D
V gerilimi, şekil-be' deki R direncinin uçları arasına
v
T aynı i akımını sağlar
uygulanırsaAbatarya
sağlar. Başka bir
L
O
P (R , R , R ) ve eşdeğer direnç (R ) kapalı
deyimle üçlü dirençAgrubu
deyimle,
F
A
kutular içine alınırsa,
bu devrelerde yapılacak elektriksel ölçümlerle
T
S
bunları birbirinden
ayırd etmek imkansızdır.
U
M
.
R
D
eş
eş
1
2
3
eş
(27–18)
Seri Bağlı Dirençler :
M
I
R
Şekil-a' da, seri bağlı üç dirençten oluşan bir devre verilmiştir.
I
D
L
toplamı kaynağının gerilimine eşittir (V V +VY=I ). Şekil-b'de
A
ğ ı üçç dirence eşdeğer
ş ğ tek dirençli
ç bir
devre verilmiştir.
ş
seri bağl
L
Y
Ea seçilir ve saat ibreleri
Her iki devre için de, başlangıç noktası
L
.
R
yönünde Kirchhoff'
Kirchhoff un çevrim kuralı
uygulanırsa:
D
e
v
T
A
iR iR iR 0 i
L
RO R R
R R R R
P
iR 0 F
A
i
R
A
T
S
b l
bulunur.
n tane
di
direncin
i serii bbağlanması
ğl
d
durumunda
d iise eşdeğer
d ğ direnç:
di
U
M
.
R R
R R R ... R ifadesine sahip olur.
D
Bu dirençlerden aynı i akımı geçer. Üzerlerindeki gerilimlerin
1
1
2
2
3
3
1
2
3
eş
1
2
3
eş
eş
n
eş
i 1
i
1
2
n
(27-19)
Paralel Bağlı Dirençler :
M
I
R ( ),
verilmiştir. Dirençlerin uçları arasındaki gerilimler aynı
I
D
üzerlerinden geçen akımların toplamı ise emk kaynağı
nın
L
I
sağladığı akıma eşittir ( i i i i ). Şekil-bY
' de paralel
A
bağlı üç dirence eşdeğer tek dirençli Y
birLdevre verilmiştir.
verilmiştir
EKirchhoff' un kavşak
Her iki devre için de a noktasında
L
.
kuralı uygulanırsa,
R
D
e
1 1 1
v
i
T
R R R
1
1 1 1
A
i
;
i
;
i
olmak
üzere,
L
R
R
R
R
R R R
O
i
P
R
A
Fparalel bağlanması durumunda ise eşdeğer direnç:
bulunur. n tane direncin
A
T
1
1 S
1 1
1
U
...
ifadesine sahip olur.
R
R R R
R
M
.
R
D
Ş kil a ' dda paralel
Şekill l bbağlı
ğl bağlı
b ğl üç
ü dirençten
di
oluşan
l
bi devre
bir
d
1
2
1
1
2
3
2
3
3
1
2
3
eq
1
2
3
eş
n
eş
i 1
i
1
2
n
(27-20)
Örnek : Şekilde verilen devrenin, a ve b uçları
M
I
R
arasındaki eşdeğer direncini bulunuz.
5 ve 6 nolu dirençler paralel: R56 20
.
R
A
L
Y
LE
I
D
L
YI
D
3, 4 ve R dirençleri birbirine seri: R ve40
T
A
L
O
PR 20
2 ve R
dirençleri paralel:
A
F
A
T
S
U
1 ve R Mdirençleri seri: R 40
.
R
D
56
3456
3456
23456
23456
ab
(27-21)
Örnek : Şekilde verilen devrenin, a ve b uçları
M
I
R
arasındaki eşdeğer direncini bulunuz.
1 ile 2
vee 8 ile 9 nol
nolu dirençler seri:
R12 12 ve R89 12
4 ilile R12
ve 7 ile
il R89 dirençleri
di
l i paralel:
l l
R124 6 ve R789 4
6 ve R789 dirençleri
di
l i seri:
i R6789 18
.
R
A
L
Y
LE
I
D
L
YI
D
6 ve
5 ve R
dirençleri paralel: R
T
3 ve R
dirençleri
di
l i seri:
i R
12
A
L
R ve R
paralel: R 4
O
P
A
F
A
T
S
U
M
.
R
D
56789
6789
56789
124
356789
356789
ab
(27-22)
Ampermetre ve Voltmetre :
Ampermetre akım ölçmeye yarayan bir cihazdır.
Ampermetre,
cihazdır Bir
M
I
Rbir
iletkenden geçen akımı ölçmek için, iletken belli
I
D
L
yerinden
i d kesilir
k ili ve kesilen
k il bu
b uçlar
l ampermetrenin
t i
I
Y
giriş ve çıkış uçlarına bağlanır. Böylece,
iletkendeki
A
L
Y
akımın ampermetre üzerinden
akması sağlanmış olur.
E
L iletken üzerindeki a
Yandaki devrede ampermetre,
.
R
D
ve b noktaları arasına
yerleştirilmiştir.
e
v
T
Ampermetrenin iç direnci (r ),
) devredeki
diğer dirençlerden çok küçük olmalıdır
A
L
r R ve r R .
O
P
V l
Voltmetre
iise, bi
bir ddevrede
dA
hherhangi
h i iki nokta
k arasındaki
d ki potansiyel
i l ffarkını
k ölçen
öl
F
A
bir cihazdır. Yukarıdaki
devrede voltmetre R direncinin iki ucuna (c ve d noktaları)
T
S
bağlanmıştır. Voltmetrenin
iç direnci (r ), devredeki diğer dirençlerden çok
U
M
.
büyük olmalıdır r R ve r R .
R
D
A
A
1
A
2
1
V
V
1
V
2
(27-23)
Voltmetre :
V lt t bbağlı
Voltmetre
ğl ddeğilken:
ğilk Vgerçek iR
M
I
R
I
D
b l d ğ koldan
bulunduğu
k ld akacaktır.
k kt Kirchhoff'
Ki hh ff' un çevrim
i veIkavşak
kL k
Y
kurallarından:
A
L
iRi r
r
Yr
r
i
i V i RLE
iR
i i i
Rr
Rr
Rr
.
V lt t i gerçek
Voltmetrenin
k gerilimi
ili iD
ölçmesi
ölR i için:
i i r R olmalıdır.
l ld
e
v
Ampermetre:
T
A
L
AmpermetreO
bağlı değilken: i
R
P
A
Ampermetre
bağlandıktan sonra, devreden geçen akım:
F
A
T R
Voltmetre bağlandıktan sonra, i akımının bir kısmı voltmerenin
2 V
1
1
1
2
V
1
V
V
V
V
V
Vgerçek
V
gerçek
S
U
D
M
.
R
i
igerçek
R rA R rA
Ampermetrenin
p
ggerçek akımı ölçmesi için: rA R olmalıdır.
(27-24)
RC Devresi : Bir Kapasitörün Dolması :
M
Yanda verilen devreyi ele alalım. t 0 anında
I
R
I
kapasitörün
p
boşş olduğunu
ğ
ve S anahtarının
LD a
I
Y
noktasına temas ettirildiğini kabul edelim.
A
L
Böylece batarya kapasitörü
Böylece,
R direnci üzerinden
Y
E
L
yüklemeye başlar. .
R
D
Buradaki amacımız, kapasitörde biriken yükü
zamanın bir fonksiyonu olarak
e
v
ç , bataryadan
y
negatif
g ucundan başlar
ş ve saat ibreleri
bulmaktır. Bunun için,
T
A
L
yönünde hareket ederek çevrim kuralını uygularsak:
O
Pdq q
q
dq
q
A
iR 0 F R 0
R
dt
C
C
dt
C
A
T(i dq / dt).) Bu eşitlik,
eşitliği elde edilir
eşitlik homojen olmayan birinci dereceden
S
U
lineer birM
diferansiyel denklemdir.
.
R
D
(27-25)
dq
q C q
dq
dt
R
dt
C
C
C q RC
q
t
dq
dt
0 C q 0 RC
M
I
R
t
C q
ln
q (t ) 1 e t /
RC
C
çözümü elde edilir. Burada RC ' dir ve devrenin "zaman sabiti"
olarak tanımlanır. Bu süre içinde kapasitördeki yük maksimum
değerinin 0.632 katına ulaşır. Bir diğer nicelik ise, T1/ 2 RC ln(2)
.
R
A
L
Y
LE
I
D
L
YI
eşitliği ile tanımlanan "yarılanma zamanı" dır ve kapasitörün yarı
D
e
v
T
yarıya dolması için geçen süre olarak tanımlanır. Kapasitör üzerinde
biriken yükün zamana bağlı değişimi şekil-a' da verilmiştir.
A
L
O
dq
P
i
i (t ) e
dt
FRA
A
ile verilir ve zamana
bağlı değişimi şekil-b' deki gibidir. t 0 anında devredeki
T
S
akım maksimumdur
ve kapasitörde yük biriktikçe azalır. Devrenin zaman sabiti
U
RC .veM
yarılanma süresi T aynıdır. Akımın, maksimum değerinin 1/e' sine
R
düşmesi
D için geçen süre , yarısına düşmesi için geçen süre T olarak tanımlanır.
Devreden geçen akım ise,
t /
1/ 2
1/ 2
(27-26)
Örnek : Sığası C olan yüksüz bir kapasitör, emk' sı olan
bi batarya
bir
b t
ile,
il şekildeki
kild ki gibi,
ibi R direnci
di
i üüzerinden
i d yükleniyor.
ükl i
M
I
R
I
D
L
YI
C = 5 F, R = 8 105 ve = 12 V olduğuna göre, devrenin
zaman sabitini,
sabitini yarılanma süresini,
süresini kapasitördeki maksimum
yükü ve devredeki maksimum akımı bulunuz. Anahtar kapatıldıktan kadar sonra,
kapasitördeki yük ve devredeki akım ne olur?
q (t ) 1 e t /
i ( t ) e t /
R
ve
RC 8 10 5 10
5
6
4s
.
R
A
L
Y
LE
D
e
v
T
A
L
q 12 5 10 60 O
PC
A
12
1.5F
10 A 15 A
i
A
R 8 10 T
q (t ) 12 5 U
10S 1 e 60 10 1 e 37.9 C
M
.
12
i (t ) R e
e 0.552
0 552 10 55.52
52 A
8 10
D R
T1/ 2 RC ln
l 2 4 lln 2 2.77
2 77 s
6
max
5
max
5
6
/
/
1
6
1
5
5
(27-27)
Örnek : Yanda verilen devredeki S anahtarı, kapasitör tamamen doluncaya
kadar tutulsun.
tutulsun Her direnç üzerindeki kararlı akımı ve kapasitör üzerindeki
yükü bulunuz. t = 0 anında anahtar açılırsa, R2 direnci üzerinden geçen akımı
zamanın fonksiyonu olarak bulunuz ve kapasitör üzerindeki yükün maksimum
değerinin 1/5' ine düşmesi için geçen süreyi hesaplayınız.
M
I
R
I
D
L
YI
A
L
Devre kararlı duruma ulaştığında
ulaştığında, kapasitörün bulunduğu koldan
akım geçmez
geçmez.
Y
12 k ve R dirençleri üzerinden aynı akım geçer: LE
.
9
1
R
i
10 0.33 mA
D
27 10
3
e
v
q
1
T
V iR
q 10 15
10 10 10 50 C
A
C
3
L
O birbirine seri bağlı 15 k ve 3 k' luk
t 0 anında anahtar açılırsa, P
kapasitör
A
dirençler üzerinden boşalacaktır.
F
A
q
dq
T
q (t ) q e
i
(
t
)
e
S
dt R C
U
M
.
q
R
q e
t R C ln 5 18 10 10 10 ln 5 290 10 =00.29
29 ms
5D
2
3
3
C
2
m
m
3
m
t / Reş C
6
3
m
t / Reş C
eş
m
m
t / Reş C
eş
3
6
3
(27-28)
Örnek : Yandaki devre, sığaları C1 = 2 F ve C2 = 3 F olan iki kapasitör,
dirençleri R1 = 2 k ve R2 = 3 k olan iki direnç ve emk
emk' sı = 120 V olan
bir bataryadan oluşmuştur. Kapasitörler başlangıçta boştur ve t = 0 anında
M
I
R
I
D
L
YI
S anahtarı kapatılıyor. Kararlı denge durumunda, kapasitörler üzerindeki
q1 ve q2 yüklerini bulunuz.
A
L
RR Y
1
1
1
R
1.2 k
R ve R dirençleri paralel:
E
L
R
R R
R R
.
R
C ve C kapasitörleri
k
i l i paralel:
l l C C C
C
5 F
D
e
Devre, sığası C 5 C ve direnci R v1.2 k olan basit bir RC devresidir.
T
A q C 120 5 10 600 C
Kapasitör üzerindeki maksimumLyük:
O
P C
qA
0 4 600=240
600 240 C
q q q
q 0.4
F
C C
q
q A
T
C
S
C
C
q
q 0.6 600=360 C
U
C C
M
.
R
D
1
eş
1
1
eş
2
2
1
eş
m
2
1
2
1
2
1
2
2
eş
2
eş
m
1
1
eş
2
1
1
1
m
2
2
2
1
eş
6
m
2
(27-29)
Örnek : Kararlı denge durumunda, yandaki devrede gösterilen
tüm akımları hesaplayınız.
hesaplayınız Kapasitör üzerindeki maksimum yük
ne kadardır?
Devre kararlı duruma ulaştığında, kapasitörün bulunduğu
koldan akım geçmez. Yani, I 5 0 ve I 4 I1 olur.
A
L
Y
LE
Kirchhoff' un çevrim ve kavşak kurallarından,
defc halkası için: 4 3 I 2 5 I 3 0 3 I 2 5 I 3 4
c kavşağı için: I1 I 2 I 3
(Eş-3)
I
D
L
YI
(Eş-1)
.
R
D
e
v
T
gbcf halkası için: 8+3 I 2 5 I1 0 5 I1 3 I 2 8
M
I
R
(Eş-2)
A
L
8 3I
4 3I
11 O4
4
A
I
I P I
5
5
5
5
11
A
F
A4
4
4
3
8 3T
8 3I
4 3I
11 76
11 56 A
I
US
A ve I
5 M
5
55
5
5
55
.
q
R
ahgb
h b halkası
i i 3
8 0 q 11C 11 6 10 66 C
D h lk için:
Eş-1' den I 3 ve Eş-2' den I1 çekilip Eş-3' te yerine konursa:
2
1
2
2
2
2
2
3
m
C
m
2
6
(27-30)
RC Devresi : Bir Kapasitörün Boşalması :
Yanda verilen devreyi ele alalım.
alalım t 0 anında kapasitördeki
M
I
yükün q olduğunu varsayalım ve S anahtarının b noktasına
R
I
D
temas ettirildiğini kabul edelim.
edelim Böylece
Böylece, bataryadan
ayrılan
L
I
Y Başlangıcı
kapasitör R direnci üzerinden boşalmaya başlar.
A
L
b noktası seçer ve saat ibreleri yönünde
hareket ederek çevrim
Y
E
kuralını uygularsak:
L
.
q
dq Rq
dq
iR 0
R
0
i
alınmıştır!!!
D
C
dt
C
dt
e
v
Tli bibir dif
B eşitlik,
Bu
i lik birinci
bi i i dereceden,
d
d homojen,
h
j A lineer
diferansiyel
i l ddenklemdir.
kl di
L
dq
q
dq
dtPO
dq
dt
dt
RC
q ARC
q
RC
F
A
q
t T
ln S q(t ) q0e-t /
RC
U
q
M
.
Kapasitör üzerindeki yük eksponansiyel olarak azalmakta ve t durumunda sıfıra
R
D
ulaşmaktadır.
Devrenin zaman sabiti RC ve yarılanma süresi T aynıdır.
0
q
t
q0
0
0
1/2
(27-31)
Örnek : Sığası C olan bir kapasitörün R direnci üzerinden boşaldığını varsayalım.
M
I
R
a ) Kapasitördeki yük ne kadar zamanda maksimum değerinin 1/4' üne düşer.
I
D
L
YI
b) Kapasitördeki enerji ne kadar zamanda maksimum değerinin 1/4' üne düşer.
qm
t
t / RC
a ) q (t ) q m e
qm e
ln 4
RC
4
t RC ln 4 1.39 RC 1.39
t / RC
.
R
A
L
Y
LE
qm2 e 2 t / RC
qm2
qm2 e 2 t / RC
1 q (t ) 2
b ) U (t )
U (t )
2 C
2C
4(2C )
2C
2t
RC
ln 4 RC ln 2 0.693 RC 0.693
ln 4
t
RC
2
A
F
S
U
A
L
O
P
D
e
v
T
A
T
M
.
R
D
(27-32)
Örnek : Sığası C olan bir kapasitör emk' sı olan batarya ile yükleniyor
ve daha
d h sonra da,
d bataryadan
b
d sökülüp
k l bir
bi R direnci
di
i üzerinden
i d boşaltılıyor.
b l l
I
D
L
YI
Kapasitör tamamen boşalıncaya kadar, R direnci üzerinde açığa çıkan ısı
enerjisi miktarı ne kadardır?
Kapasitör boşalırken:
q (t ) qm e t / RC Ce t / RC
i (t )
t / RC
e
R
.
R
D
e
dE i (t ) Rdt E i (t ) Rdt v
R e
TR
A
L
RC
C O
e
1 C
E
e
du
P2 2
R 2
A
F
A
T
S
U
M
.
R
D
2
2
ısı
2
ısı
0
2
ısı
0
u
2 t / RC
0
2
e 2 t / RC
A
L
Y
LE
M
I
R
u 2t / RC
dt ;
du 2 dt / RC
C
2
0
(27-33)
BÖLÜM-28
Manyetik Alan
Bu bölümde aşağıda listelenen konulara değinilecektir:
A
L
Y
LE
M
I
R
I
D
L
YI
Manyetik alan vektörü B ,
Hareket eden y
yüklü parçacığa
p ç ğ etkiyen
y manyetik
y
kuvvet FB ,
Manyetik alan çizgileri
Düzgün manyetik alanda yüklü parçacığın hareketi
Akım taşıyan tele etkiyen manyetik kuvvet
Akım halkasına etki eden tork
Manyetik dipol,
dipol manyetik dipol moment ,
Hall etkisi
Parçacık hızlandırıcı: Cyclotron (zorunlu değil)
A
F
S
U
A
L
O
P
D
e
v
T
.
R
A
T
M
.
R
D
(28-1)
Manyetik Alanın Kaynağı :
Manyetik alan oluşturmanın iki yolu vardır:
M
I
R
I
D
L
I
Y
İçinden elektrik akımı geçirilen iletken tel (elektromagnet)
A
L
Y
E
Kalıcı mıknatıslanmaya sahip L
malzemeler
(mıknatıs)
.
R
D
Hem elektromagnetehem de mıknatıs ince demir tozlarını
v
T
çeker Merkezinden
çeker.
dik geçen eksen etrafında serbestçe
A
L
dönebilen
hafif bir çubuk mıknatıs, kendisini Güney-Kuzey
O
P
doğrultusunda
yönlendirecek şekilde döner (pusula).
(pusula) Hem
A
AFakım taşıyan tel hem de mıknatıs, çevrelerinde "manyetik
ST
.
R
U
M
alan" (B ) ol
oluşturur
şt r r vee kendilerini "manyetik
man etik kuvve
k et" (FB )
uygulayarak hissettirirler.
D
(28-2)
B Manyetik Alanının Tanımı :
Manyetik alan vektörü, v hızına sahip bir q yüküne uyguladığı FB
M
I
R
I
manyetik
y
kuvveti cinsinden tanımlanır. q yyüküne sahip
p pparçacık
ç
D
L
I
Y
gelişigüzel doğrultularda B manyetik alanına gönderilir ve manyetik
A
L
alan içinde izlediği yollara bakılır.
bakılır q yüküneYetkiyen F kuvvetinin
LE
sıfır olduğu tek bir doğrultu vardır. B. manyetik alanı bu doğrultuya
R
paraleldir. Bunun dışındaki tümDdoğrultularda F kuvveti sıfırdan
e
v
farklıdır ve büyüklüğü
y
ğ T
F q vB sin ile verilir. Burada , v ile B
A
L
arasındaki açıdır.
Vektörel olarak bu kuvvet F qv B ifadesine
O
P
sahiptir
hi i ve
sağ-el
ğ l kuralına
k l göre,
ö v ile B' nin
i oluşturduğu
l
d ğ düzleme
dü l
A
F
A
diktir.
Manyetik alanın SI sistemin deki birimi:
T
S
N
U N
B
B
B
B
R
D
.M
C (m / s)
=
A m
= tesla
(28-3)
Vektörel Çarpma:
IM
a ve b vektörleri arasındaki vektörel çarpma işlemi, c IRa b
D
ile verilen yeni bir vektör oluşturur.
oluşturur c vektörününILbüyüklüğü
Y
Aoluşturduğu
c ab sin ile verilir ve a ile b vektörlerinin
L
Y
düzleme diktir. Yönü "sağ-el-kuralıL
"E
ile belirlenir:
.
R
i a ve b vektörlerinin başlangıç
i.
noktalarını
birleştiriniz
birleştiriniz.
D
e
ii. a vektörünü parmak vuçlarınız
onun yönünü gösterecek
T
Aiçine yatırınız.
şekilde sağ avuç
L
O
P küçük
iii. a vektörünü
ç açı
ç yyönünde b 'nin üzerine süpürünüz.
p
A
F
iv. Başparmağınız
c vektörünün yönünü verir.
A
T
S
U
M
.
R
Vektörel çarpım, "cross" çarpım olarak da bilinir.
D
(28-4)
Bileşenleri Cinsinden Vektörel Çarpma :
a b a x ˆi a y ˆj a z kˆ b x ˆi by ˆj bz kˆ
ˆi ˆi ˆj ˆj kˆ kˆ
ˆi ˆj kˆ ; ˆj ˆi kˆ
0
kˆ ˆi ˆj ; ˆi kˆ ˆj
ˆj kˆ ˆi ; kˆ ˆj ˆi
olduğundan
e
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
v
T
a b a y bz a z by iî L
a
b
Az x a x bz ˆj a x by a y bx kk̂
O
P determinant yolu ile de belirlenebilir.
Not : a b, aşağıdaki
belirlenebilir
A
i
F
A
Tj k
S
U
a b M
ax a y az
.
R
D
bx
by
;
Not : a b b a
bz
(28-5)
Manyetik Alan Çizgileri : Elektrik alan ile elektrik alan çizgileri arasındaki ilişki
M
I
R
gibi, manyetik alan ile manyetik alan çizgileri arasında da benzer bir ilişki vardır:
I
D
L
1. Herhangi bir P noktasında, manyetik alan vektörü B manyetik alan çizgisine
YI teğettir.
A
L
Y
E
L
.
R
D
e
v
2. Manyetik alan şiddeti, manyetik alan çizgilerinin yoğunluğu ile orantılıdır.
T
A
L
O
P
B B
A
F
A
T
S
U
M
.
R
D
P
Q
(28-6)
Kalıcı Bir Mıknatısın Manyetik Alan Çizgileri:
M
I
R
Şekil-a' da, kalıcı bir mıknatısın manyetik alan çizgileri
I
D
L
YI
gösterilmiştir. Bunlar, bir kısmı mıknatısın içinden geçen
kapalı halkalar şeklindedir. Pozitif yükte başlayıp negatif
A
L
Y
LE
yükte sonlanan elektrik alan çizgileri gibi, başlangıç ve
bitiş noktaları yoktur. Kapalı halka şeklindeki manyetik
.
R
alan çizgileri, mıknatısın bir ucundan girer diğer ucundan
çıkarlar. Alan çizgilerinin çıkış yaptıkları uç mıknatısın
D
e
v
kuzey kutbu, giriş
yaptıkları uç ise güney kutbu olarak
T
A bağımsız olacak şekilde mıknatıstan
bilinir. BuLkutupları
O
y P y İkisi birlikte bir "magnetic
g
dipole
p " oluştururlar.
ayıramayız.
A
Şekil-b'
de, at nalı şeklinde bükülmüş bir çubuk mıknatısın
F
S
U
R
D
.M
A
T
manyetik
y
alan ççizgileri
g
verilmiştir.
ş Şekilden
Ş
de anlaşılacağı
ş
ğ
gibi, kutuplar arasında ve kutupların birbirine yakın olduğu
yyerlerde manyetik
y
alan çok
ç şşiddetlidir.
(28-7)
Örnek : Şekilde görüldüğü gibi, bir televizyon tüpü içerisindeki elektronlar
+xx-ekseni
ekseni yönünde 8 106 m/s
m/s' lik bir hızla ekrana dik doğrultuda gelmektedir.
Tüpü çevreleyen kangalların oluşturduğu manyetik alan xy -düzleminde, x -ekseni
ile 60o ' lik açı yapmakta ve büyüklüğü de 25 mT' dır. Elektronlara etkiyen
manyetik kuvvetin büyüklüğünü ve elektronun ivmesini hesaplayınız.
FB qv B FB evB sin 1.6 10 19 8 10 6 25 10 3 sin 60
FB 2.77 10 14 N (sağ-el kuralına göre, z yönünde)
FB
2 77 10 14
2.77
16
2
F ma a
3.04
10
m/s
me
9.11 10 31
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Örnek : Bir proton,
proton + y -ekseni yönündeki 0.3
03T
T' lık bir manyetik alan içinde,
içinde alan
A
L
ile 37 ' lik açı yapacak şekilde 3 10 m/s hızla hareket etmektedir. Protona etkiyen
O
Pprot
manyetik
y
kuvvetin büyüklüğünü
y
ğ
ve
p onun ivmesini hesaplayınız.
p y
A
F
A
F qv B F evB sin 1.6 10 3 10 0.3 sin 37
T
S
F 8.7 10 N
U
M F 8.7 10
.
R
F ma
5 21 10 m/s
D a m 1.67 10 5.21
o
B
6
19
B
B
B
p
6
14
14
13
2
27
(28-8)
Örnek : Kinetik enerjisi 5 MeV olan ve + x-ekseni yönünde giden protonlar,
şekildeki gibi, x 0 ile x 1 m aralığında etkin, büyüklüğü B 0.05 T olan ve
sayfa düzleminden dışarı doğru yönelmiş düzgün bir manyetik alan bölgesine
giriyor. Protonlar manyetik alan bölgesini hangi hızla terkederler.
19
(1 eV
V 11.6
6 1019
J)
J).
A
L
Y
LE
1
16 10 13
2
6
19
7
m p v0 5 10 1.6 10 v0
3.1
10
m/s
27
2
1.67 10
FB qv0 B m p a y ev0 B sin 90
.
R
M
I
R
I
D
L
YI
D
Proton çok hızlı olduğu için merkezcil kuvvetin yatay
e yöndeki bileşeninin etkisi
v
ihmal edilebilir.
T
A
L
0.05
1.6
10
3.1
10
O
a
1.5 10 m/s (sağ-el kuralına göre, y yönünde)
P
1.67 10
A
v v a t
v 3.1 10 m/s
v
F
A
a 0
1
T
x
v
t
t
3.22 10 s
S
3.1 10
U
v v aM
t v a t 1.5 10 3.22 10 4.83 10 m/s
.
0 483
Rˆ
0.483
ˆj 10 m/s
ve
tan
v D
3.1i
0.483
8.86
3.1
19
7
14
y
27
x
0x
x
x
7
0
x
8
0x
y
2
0y
y
7
y
y
7
8
14
1
6
o
(28-9)
Elektronun Keşfi : Yandaki şekilde bir
M
I
R
k d ışınları
katod
l tüpü
ü ü görülmektedir.
ö ül k di Filamanın
Fil
I
D
L
I
Y
farkı altında hızlanırlar
ve odaklanırlar.
A
L
Y
E dışarı çıkar ve
Anotta açılmış küçük bir delikten ince bir elektron demeti oluşturarak
L
.
R
floresan ekrana çarparak bir ışık noktası oluştururlar
oluştururlar. 1897
yılında J.J.
J J Thomson benzer
D
bir katod ışını tüpü kullanarak, ışık noktasını neyin
e oluşturduğunu anlamak için araştırmalar
v
yaptı. Şekilde görüldüğü gibi, anot
anot' un sağ T
tarafındaki bölgeye birbirine dik, sabit elektrik
A
alan ve manyetik alan uyguladı. DemetLüzerindeki net kuvveti sıfır yapacak manyetik alan
O
y Py
demetin sapmasını
p
engelledi.
g
Buradan,,
ve elektrik alan şşiddetlerini ayarlayarak
A
1
2eV F
A
mv eV v
Tm
2
S
U
E
2eV
e
E
F =F M
eE evB v
.
B
m
m 2VB
R
D ulaştı ve böylece elektronu keşfetmiş oldu.
sonucuna
ısıttığı katod' tan elektron yayınlanır. Anot
il katod
ile
k d arasına uygulanan
l
V potansiyel
i l
2
2
E
B
2
(28-10)
Düzgün Manyetik Alan İçinde Yüklü Parçacığın Hareketi
(Dairesel hareket =cyclotron hareketi):
M
I
R
Kütlesi m olan bir q nokta yükü, v hızıyla düzgün manyetik alan
I
D
L
I
Y
hareket yanda verilmiştir. Böyle bir hareketi sağlayan
merkezcil
A
L
Y
kuvvet F qv B ile verilen manyetikEkuvvettir.
L
.
Böyle bir hareketin yarıçapı, periyodu ve frekansı:
R
D
mv
v
e
F q vB ma m r
v
qB T
r
A
L
qB
qB
2 r 2 mv
2 m O
1
T
f f
2 f
T
P
v
q Bv
qB
T
2 m
m
A
F v hızına bağlı değildir. Aynı yüke ve kütleye sahip tüm
Not 1 : Hareketin periyodu
A
Thızlara sahip olsalarda,
parçacıklar farklı
parçacıklar,
olsalarda tam bir turu aynı sürede yaparlar.
yaparlar
S
U
Not 2 : Hızlı
parçacıklar büyük yarıçapta çemberler üzerinde dolanırken, yavaş
M
.
parçacıklar
daha küçük yarıçapta çemberler üüzerinde
zerinde dolanırlar.
dolanırlar
R
D
içine dik olacak şekilde girerse, düzgün dairesel hareket yapar.
Manyetik alana dik olarak giren bir elektronun yaptığı dairesel
B
2
B
(28-11)
Örnek : Yanda, iyonları kütle-yük oranlarına göre ayırd etmeye yarayan
p
ş Kaynaktan
y
ççıkan
"Kütle spektrometresi
" nin şşematik ggösterimi verilmiştir.
iyonlar dar bir yarıktan geçirilerek, birbirine dik elektrik (E ) ve manyetik
(B0 ) alan olan bir bölgeden geçirilir ve düzgün başka bir manyetik alan (B1 )
bölgesine dik olarak girerler. İyonlar bu bölgede r yarıçaplı yarım bir
A
L
Y
LE
çember çizerek fotografik bir yüzeye çarparlar. İyonların kütle-yük oranını
if d eden
ifade
d bbağıntıyı
ğ
türetiniz.
ü i i
E
qE qv B0 0 qE qvB0 v
B0
v2
mv
FB q
qv B qvB
q 1 m r
r
qB1
A
L
O
P
.
R
M
I
R
I
D
L
YI
D
e
v
T
m rB1 rB0 B1
E
q
v
Bu ifade kullanılarak, iyonların kütle-yük oranı deneysel olarak belirlenir.
A
F
S
U
A
T
M
.
R
D
(28-12)
Spiral (sarm al) Yörünge :
Düzgün
Dü
ü manyetik
tik alanına,
l
v hhızı il
ile B manyetik
tik
M
I
R
I
D
L
YI
alanı arasında açısı olacak şekilde giren yüklü
bi parçacıkk olsun.
bir
l
Parçacığın v hhızını, manyetik
ik
alana dik ve paralel olan bileşenlere ayıralım. Bu
A
L
Y
bileşenler yanda gösterilmiştir:
v v cos ve
E
L
.
v v sin . Parçacık bağımsız iki hareket yapar.
R
D
Bunlardan birisi, manyetik alana dik olanedüzlemde yarıçapı ve periyodu,
v
mv
2 m
T
r
; T
A
L
qB
qB
O
olan dairesel hareketidir.
hareketidirA P
F yönünde v sabit hızıyla yapılan ötelenme hareketidir.
Diğeri ise, manyetik
alan
A
T
S
B iki hareketin
Bu
h k ti birleşimi
bi l i i spiral
i l şeklindedir
kli d di ve spiralin
i li sarmall adımı
d
(p ):
)
U
M
2 mv cos
.
p
Tv
R
qB
D
(28-13)
Örnek : Bir proton, büyüklüğü 0.35 T olan düzgün bir manyetik alan içerisinde, yarıçapı 14 cm
olan çembersel bir yörünge üzerinde düzgün dairesel hareket yapmaktadır. Protonun yörüngedeki
çizgisel hızını bulunuz. Aynı manyetik alan içerisinde bir elektron, aynı çizgisel hızla düzgün
dairesel hareket yapsaydı, yörüngesinin yarıçapı ne olurdu?
v2
FB qv B evB m
r
M
I
R
A
L
Y
LE
19
2
erB 1.6 10 14 10 0.35
6
v
4
4.7
7
10
m/s
/
27
m
1.67 10
31
6
mv 9.11 10 4.7 10
6
r
76
76.4
4
10
76.4
76 4 m
19
eB
1.6 10 0.35
.
R
I
D
L
YI
D
e
v
Örnek : 350 V' luk bir potansiyel fark altında durgun halden hızlandırılan elektronlar, düzgün bir
T
manyetik alan içerisine dik olarak giriyor ve A
yarıçapı 7.5 cm olan çembersel bir yörünge üzerinde
L
hareket ediyor. Manyetik alanın büyüklüğünü,
elektronların açısal hızını ve periyodunu bulunuz.
O
P
A
700 1.6 10
1
11.110 m/s
m v 350 1.6 10 Fv
A
2
9.1110
T
S
9 11 10 11.1
11 1 10
m v 9.11
v
U
F qv B evB m
B
8.43 10 T
r
er
M
1.6 10 7.5 10
.
11 110
11.1
2
2
vR
D
1.48 10 rad/s ;
T
4.25 10 s 42.5 ns
19
19
2
e
6
31
31
2
B
6
r
7.5 102
4
e
e
0
6
19
2
8
8
T
1.48 108
(28-14)
Örnek : Yükü q 3.2 1019 C olan bir parçacık, düzgün bir elektrik ve manyetik alan olan
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
bölgeye v 2i 3j k m/s hızla giriyor. E 4i j 2k V/m ve B 2iˆ + 4jˆ + kˆ T
M
I
R
I
D
L
YI
olduğuna göre, parçacığa etkiyen net kuvveti bulunuz. Bu kuvvet x-ekseni ile ne kadarlık bir
açı yapar??
F qqE qv
q B
ˆi
ˆj
kˆ
.
R
v B 2 3 1 3 4 ˆi 2 2 ˆj 8 6 kˆ = 7iˆ 4ˆj 2kˆ
D
e
v
ˆ 3.2 10
F 3.2 10 4iˆ ˆj 2kˆ 7iˆ 4ˆj 2k
T
A
L
5
tan 24.4
O
11
P
A
F
A
T
S
U
M
.
R
D
2 4
1
19
1
19
A
L
Y
LE
11iˆ 5jˆj N
o
(28-15)
Akım Taşıyan Tele Etkiyen Manyetik Kuvvet:
M
I
R
Şekilde, kesit alanı A olan ve i akımı taşıyan uzun bir
I
D
L
YI
tel verilmiştir. Telin L uzunluğundaki bir kısmı, sayfa
düzleminden dışarı doğru yönelmiş düzgün bir manyetik
alan içinde
ç
olsun. B manyetik
y
alanı tarafından tele dik
doğrultuda bir FB kuvveti uygulanır. Bu kuvvet, telin L
A
L
Y
LE
.
R
uzunluğunda bulunan tüm elektronlara
etkiyen manyetik
D
e
kuvvetlerin vektörel v
toplamına
eşittir. Telin L uzunluğunda
T Q olmak üzere,
bulunan toplam
toplamAyük
üzere
L
LO
Q it P
i Qv iL
v
A
F
A
T
F q v B sin 90 q v B Qv
Q B
S
d
d
D
.
R
U
M
B
i
i d
F iLB
B
o
i
i
d
d
(28-16)
Telin akım yönünün, B manyetik alanı ile herhangi
bir açısı yaptığı genel durumda (Şekil-a)
(Şekil a) manyetik
kuvvet vektörel formda, FB iL B şeklinde yazılabilir.
Burada L vektörü, büyüklüğü telin L uzunluğuna
eşit, akımla aynı yönde bir vektördür.
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
Manyetik alanın düzgün olmadığı ve akım taşıyan
telin doğrusal olmadığı durumlarda (Şekil-b) akım
taşıyan tel, doğrusal kabul edilebilecek sonsuz küçük
A
L
O
P
D
e
v
T
dL uzunluğundaki elemanlara bölünür. Her bir dL
y manyetik
y
kuvvet dFB = idL B
elemanına etkiyen
A
F olduğundan, net kuvvet:
S
U
M
.
R
A
T
FB i dL B
şeklinde yazılır.
D
(28-17)
Örnek : İletken bir tel bükülerek R yarıçaplı kapalı bir yarım çember
haline getirilmiştir.
getirilmiştir Sayfa düzleminde bulunan ve yukarı yönde olan
düzgün bir B manyetik alanı içine konan iletken halka, şekildeki gibi,
saat ibrelerinin tersi yönünde I akımı taşıdığına göre, halkaya etki eden
net kuvveti bulunuz.
F1 ve F2 , sırasıyla, halkanın düz kısmına ve çembersel kısmına etkiyen kuvvetlerdir.
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
2R
2R
F1 Idl B F1 IdlB sin 90 IB dl 2 IRB (sayfa düzleminden dışarı doğru)
D
e
v
F Idl B F IdlB sin IB sin ( Rd )
T
A
L
F IBR cos 2 IRB (sayfa düzleminden içeri doğru)
O
P
A
F F F
F
A
T
S
F 2 IRB 2 IRB
0
U
M
.
R
D
0
0
2
2
0
2
0
1
2
(28-18)
Örnek : Yandaki devrenin tabanındaki iletken telin uzunluğu L = 5 cm
ve kütlesi m = 10 g'
g dır.
dır Devredeki direnç R = 12 ve bataryanın emk'
emk sı
= 24 V' tur. Manyetik alan yokken yaylardaki uzama miktarı 0.5 cm iken,
sayfa düzleminden dışarı doğru düzgün bir B manyetik alan uygulandığında
0.8 cm oluyor. Uygulanan manyetik alanın şiddeti nedir?
A
L
Yay sabiti k ve manyetik alan yokken uzama miktarı y olsun.
olsun
Y
E
24
L
Devreden geçen akım: I
2 A (saat ibrelerinin tersi.yönünde)
R 12
R
D
Manyetik alan yokken: 2ky mg
(Eş-1) ve
T
Manyetik alan varken: 2ky mg ILB (Eş-2)
(Eş 2)
A
L
O
Eş-2 ve Eş-1' i taraf tarafa oranlarsak,
P
A
y F mg 0.8 10 10 10
y
mg ILB
B A 1
1
0.6 T
y
mg
T
y
IL 0.5 2 (5 10 )
S
U
M
.
R
D
M
I
R
I
D
L
YI
0
0
1
3
1
1
0
0
2
(28-19)
Örnek : Birim uzunluğunun kütlesi olan ve I akımı
taşıyan iletken
il k bi
bir çubuk
b k iki ucundan
d ağırlıksız
ğ l k iiplerle
l l
asılmıştır. Çubuğun bulunduğu bölgede yukarı yönde
dü ü B manyetik
düzgün
tik alanı
l uygulandığında,
l d ğ d çubuğ
b ğu taşıyan
t
ipler düşeyle açısı yapacak şekilde çubuk dengede
k l
kalıyor.
M
Manyetik
tik alanın
l
şiddetini
idd ti i bbulunuz.
l
.
R
Çubuğun boyu L olsun.
olsun
T sin FB ILB
(Eş
(Eş-1)
1)
T cos mg Lg
(Eş-2)
A
F
A
L
O
P
M
I
R
I
D
L
YI
A
L
Y
LE
D
e
v
T
Eş-2 ve Eş-1' i taraf tarafa oranlarsak,
A
T
S
ILB
g
tan MU
B
tan
I
Lg
.
R
D
(28-20)
Örnek : Kütlesi m ve yarıçapı R olan iletken bir çubuk, şekildeki
gibi aradalarında d mesafesi olan L uzunluğundaki iki paralel
gibi,
M
I
R
iletken ray üzerinde durmaktadır. İletkenden i akımı geçtiğinde ve
rayların oluşturduğu düzleme dik ve yukarı yönde düzgün bir B
manyetik alanı uygulandığında, iletken durgun halden sağa doğru
A
L
Y
LE
I
D
L
YI
kaymadan
y
yuvarlanmaktadır.
y
İletken yyayları
y
hangi
g hızla terkeder?
FB = idL B F iBd
.
R
(sağ-el kuralına göre sağa doğru)
D
e
v
T
1
1
W K mv 2 I 2
2
2
1
A
Burada I , silindirin eksenine göreLeylemsizlik momentidir (I mR ).
2
O
P
1
1 1A
1
3
v 1
W F L mv F
mR mv mv mv
2
22
2
4
4
A
R
T
S
4 FL U 4 iBdL
v
M
3.m
3 m
R
D
2
2
2
2
2
2
2
(28-21)
Akım Halkasına Etki Eden Manyetik Tork:
M
I
R
Şekil-a' da a ve b kenar uzunluklarına
sahip, i akımı taşıyan dikdörgen şeklinde
I
D
L
I Akım halkası,
bir akım halkası verilmiştir.
Y
A
yyüzeyy normali nˆ, L
B manyetik
y
alanı ile
Y
Eşekilde manyetik alanı içine
açısı yapacak
L
.
R
konuyor 1 ve 3 nolu kenarlara etkiyen manyetik
konuyor.
kuvvetler
ile 2 ve 4 nolu kenarlara
D
e büyüklükte ve ters yöndedirler:
etkiyen manyetik kuvvetler kendi içlerindeveşit
T
F F iaB
i B sin
i 90 iaB
i B
A
L
F F ibB sin(90 ) ibBO
P cos
A
Bu kuvvet çiftlerinin vektörel
toplamı sıfırdır (F 0). Ancak, F ve F kuvvetleri,
F
A
halkanın merkezi C
noktasına
göre sayfadan içeri doğru bir tork oluşturur (halkayı
T
S
saat yönündeU
döndürür) ve büyüklüğü de:
M iabB
.
iabB
R
+ (
)sin (
)sin iabB sin iAB sin
D
2
2
1
3
2
4
net
1
1
3
3
(28-22)
Manyetik Dipol Moment :
Sarım sayısı N olan ve i akımı taşıyan bir akım halkası
B manyetik alanı içine konulduğunda üzerine etkiyen
M
I
R
I
D
tork NiAB ile verilir
verilir. Akım taşıyan halkayla
halkL
ayla
ilgili
I
olarak, "manyetik dipol moment ( )" olaY
rak bilinen yeni
A
L
bir vektör tanımlayabiliriz
tanımlayabiliriz. Bu vektörün
büyüklüğü NiA
Y
Edik doğrultudadır. Yönü
ile verilir ve halka düzlemine
L
.
R
sağğ ell kkuralına
l göre
ö belirlenir.
b li l i Sağ
S ğ elimizin
li i i parmak
k
uçları
l akım
k yönünü
ö ü ü gösterecek
ö
k şekilde
kild
D
e dipol momentinin yönü olur.
halkayı kavrarsak, baş parmağımızın yönü manyetik
v
T
A
L
ve B arasındaki açı olmakO
üzere tork, B sin
P
veya vektörel formda
B ile verilir.
verilir
A
F
Halkanın potansiyelAenerjisi ise, U B cos B
T
S
eşitliği
itliği ile
il verilir.
ili
U
M
.
0 U B, potansiyel enerji mnimumdur (kararlı denge konumu).
R
D U B, potansiyel enerji maksimumdur (kararsız denge konumu).
180
Not : Her iki konumda da halkaya etkiyen net tork sıfırdır ( 0).
(28-23)
Örnek : Kenar uzunlukları 5.4 cm ve 8.5 cm olan 25 sarımlı dikdörgen şeklindeki
bir halka 15 mA akım taşımaktadır.
taşımaktadır Büyüklüğü 0.35
0 35 T olan düzgün bir manyetik
M
I
R
alan, halkanın yüzeyine paralel olacak şekilde uygulanıyor. Halkanın dipol momentini,
I
D
L
halka a etkiyen
halkaya
etki en torku
tork vee halkanın potansiyel
potansi el enerjisini bbulunuz.
l n
I
Y
B yüzeye paralel, yüzeye dik olduğuna göre, B ile arasındaki açıA90 dir.
L
Y
N (iA) 25 15 10 5.4 8.5 10 1.72 10 A E
m
L
.
B B sin 1.72 10 0.35 sin 90 6.02 10 N m
R
D
U B U B cos 0
e
v
T
Uygulanan manyetik alanın
alanın, halka yüzeyi
ile 60 ve 90 yapması durumunda,
durumunda
A
L
halkaya etkiyen tork ve halkanınO
potansiyel enerjisi ne olur?
P
B yüzey ile 60 ve 90 ' lik
açı yapıyorsa
yapıyorsa, sırasıyla,
sırasıyla ile 30 ve 0 ' lik açı yapar:
A
F
B sin 1.72
10 0.35 sin 30 3.0110 N m
A
T
S
U B cos
1.72 10 0.35 cos 30 5.2110 J
U
M
.
R
B sin 1.72 10 0.35 sin 0 0
D
U B cos 1.72 10 0.35 cos 0 6.02 10 J
o
3
4
3
2
3
4
o
o
o
o
o
3
o
4
30o
3
30
4
o
3
0
o
3
0
o
4
(28-24)
Örnek : Kenar uzunlukları 0.4 m ve 0.3 m olan 100 sarımlı
dikdörgen şeklindeki bir halka
halka, şekildeki gibi,
gibi uzun kenarı
y -ekseni üzerinde, kısa kenarıda x-ekseni ile 30 açı yapacak
o
şekilde durmaktadır
durmaktadır. Halka,
Halka y -ekseni
ekseni ile çakışık olan kenarı
etrafında rahatça dönebilmektedir. Halkanın 1.2 A akım
M
I
R
I
D
L
YI
A
L
taşıması ve + x yönünde büyüklüğü 00.88 T olan düzgün bir Y
E bulunuz.
manyetik alan uygulanması durumunda halkaya etkiyenL
torku
.
R
Sağ-el kuralına göre, halkanın dipol momenti D
z doğrultusu ile
e
v ç yyapar.
30 ' lik açı
ç ve + x doğrultusu
ğ
ile 60 T
' lik açı
p
A
N (iA) 100 1.2 0.4 0.3L 14.4 A m
O
P el kuralına göre
B B sin A (Sağ
(Sağ-el
göre, y yönünde)
F saat ibreleri yönünde döner.
Halka, y ekseni etrafında
A
T
S
14.4
14 4 0.8
0 8 sin
i 60 10 N m
U
M
U . B U B cos
R
UD
14.4 0.8 cos 60 5.76 J
o
o
2
(28-25)
Örnek : Uzunluğu 60 cm olan ve 20 A akım taşıyan iletken bir tel, kapalı halka
M
I
R
h li getirilerek,
haline
i il k normali
li 00.5
5 T bü
büyüklüğündeki
üklüğü d ki manyetik
ik alana
l
dik olacak
l k şekilde
kild
I
D
L
i üzerine
ise,
ü i etkiyen
tki
torku
t k bulunuz.
b l
Hangi
H i durumda
d
d hhalkaya
lk
etkiyen
tki
ttorkk Imaksimumdur.
ki
d
Y
A
a ) Eş-kenar üçgen: 3d 60 d 20 cm
L
Y
E
1
1
3
L
A dh d d d / 2
d 0.0173.m
2
2
4
R
D
iA 20 0.0173 0.346 A m e B 0.346 0.5 0.173 N m
v
b ) Kare: 4d 60 d 15 cm
T
A
L
A d 0.15 0.0225 O
m
P
iA 20 0.0225A
0.45 A m B 0.45 0.5 0.225 N m
F
A
60 d 9.55 cm
c ) Çember: 2 d T
S
A d U
0.0955 0.0287 m
M
.
R iA 20 0.0287 0.574 A m B 0.574 0.5 0.287 N m
D
manyetik alan içine konuyor. Halka, a) eş-kenar bir üçgen, b ) kare ve c ) çember
2
2
2
2
2
2
2
2
2
2
2
2
2
Çembere etkiyen tork maksimum olur.
(28-26)
ÖDEV : Kütlesi 0.1 kg ve toplam uzunluğu 4 m olan bir tel, kenar
M
uzunluğu 0.1 m olan kare şeklindeki halka etrafına sarılarak bir
I
R
I
g elde ediliyor.
y Halka,, bir kenarı y
yatay
y eksen üzerinde olacak
kangal
D
L
I
Y
şekilde asılmıştır ve bu eksen etrafında rahatça dönebilmektedir.
A
L
Halka düşey doğrultuda büyüklüğü 10 mT olan birY
Halka,
manyetik alan
E
L
içinde iken, üzerinden 3.4 A' lik akım geçirilmektedir.
.
R
a) Halka
lk ddengede
d ik
iken, yüzeyii ile
il manyetik
ik alan
l arasındaki
d ki açı nedir?
di ?
D
e
v
b) Halka dengede iken, manyetik alan tarafından etkiyen tork ne olur?
T
A
L
O
P
A
F
A
T
S
U
M
.
R
D
(28-27)
Hall Etkisi :
M
I
Edvin Hall, 1879 yılında metallerde iletimin negatif yüklü
R
I
elektronlarla gerçekleştiğini gösteren bir deney Iyapmıştır.
yapmıştır
LD
Y
Bu deney sayesinde, metaldeki elektron yoğunluğunu
(n ) da
A
L
belirleyebilmiştir Deneyde,
belirleyebilmiştir.
Deneyd e kesitininY
genişliği d ve kalınlığı
EBu dilim, şekildeki gibi
t olan bakır bir dilim kullanmıştır.
L
.
yüzeyine dik yönde düzgün R
bir manyetik alan içinde iken i
D
e
akımı taşımaktadır. Elektronlar,
B manyetik alanı nedeniyle
v
T
F manyetik kuvvetinin
etkisiyle dilimin sağ tarafına doğru
A
L
(R) itilirler
ve
böylelikle, dilimin sağ tarafı sol tarafına (L)
O
P
göreAdaha negatif olur.
olur İki kenar arasında oluşan yük farkı
F
nedeniyle bir E elektrik alanı oluşur ve elektronlara kuvvet
A
T
B
S
U
M
.
R
uygulamaya
l
başlar.
b l Bir
Bi süre
ü sonra, elektronlar
l kt l üzerine
ü i etkiyen
tki
net kuvvet sıfır olur.
D
(28-28)
FE FB eEH evd B EH vd B
J nevd vd
J
i
i
ne neA netd
(Eş-1)
M
I
R
(E 2)
(Eş-2)
I
D
L
YIBi
Yandaki bakır dilimin a noktası ile c noktası arasındaki
Hall potansiyeli VH EH d ile verilir. Bu durumda,
sonucu elde edilir.
.
R
A
F
A
L
O
P
An
L
etV
tV
Y
LE
VH
i
B
d
netd
td
EH vd B
(Eş-3)
H
D
e
v
T
Üstteki şekilde olduğu gibi, yük
Üstteki şekilde olduğu gibi, yük
A
taşıyıcıları elektronlar
olduğu durumda
T
taşıyıcıları
aş y c a protonlar
p o o a oolduğu
duğu durumda
du u da
S
V V VUnegatiftir.
V V V pozitiftir.
M
.
Dilimin
kenarlarından hangisinin
g
pozitif
p
hangisinin
g
negatif
g
olduğundan
ğ
yyola ççıkılarak,
R
Dyük taşıyıcılarının cinsi belirlenebilir. Deneysel olarak ölçülen V Hall potansiyeli
H
c
a
H
c
a
H
Eş-3' te kullanılarak, yüktaşıyıcılarının yoğunluğu bulunur.
(28-29)
Örnek : Genişliği 1.5 cm ve kalınlığı 0.1 cm olan dikdörgen şeklindeki bakır bir
dilim 5 A akım taşımaktadır
taşımaktadır. İletken dilim,
dilim yüzeyine dik yönde
yönde, büyüklüğü 11.22 T
M
I
olan bir manyetik alan içinde ise, Hall voltajını hesaplayınız. (Bakırın elektronR
I
D
yoğunluğu: n 88.49
49 10 elektron/m ).
)
L
I
Y
1.2 5
Bi
Bi
A
V
n
L
V te
t
nte
t
Y
8 49 10 0.1
0 1 10 1.6
1 6 10
8.49
E
L
.
V 4.42 10 0.44 V
R
D
e
v
Örnek : Kalınlığı 0.33 mm olan bir şerit, yüzeyine dik yönde, büyüklüğü 1.3 T
T
A
olan düzgün bir manyetik alan içinde
50 A akım taşımaktadır. Şeritin uzun kenarları
L
O
arasında ölçülen Hall voltajı 9.6
P V ise, şeritteki elektron yoğunluğunu bulunuz.
A
F 1.3 50
Bi
A
n
T
V le 9.6
9 6S
10 00.33
33 10 11.6
6 10
U
M
n 12.82
10 elektron/m
.
R
D
28
3
h
h
28
2
3
19
19
7
h
6
h
28
3
(28-30)
Cyclotron Parçacık Hızlandırıcı :
M
I
R
Cyclotron hızlandırıcısı, şekildeki gibi birbirine ters
I
D
L
I
Y
E elektrik alanı, D' lerin bulunduğu A
düzleme dik yönde
L
Y
de düzgün bir B manyetik alanı
oluşturulur. Şekilde bir
E
L
mv
.
r
proton hızlandırıcısı g
p
gösterilmiştir.
ş
Protonlar,
,
R
eB
D
e
eB
v
yarıçaplı çembersel bir yörüngede f
frekansı
T
2 m
A
L
O
ile dönerler. Bu frekans (cyclotron
frekansı) ile elektrik alanın değişim frekansı
P
A
(f ) eşit olduğunda, protonlar
D' ler arasındaki boşlukta elektrik alan tarafından
F
A
hızlandırılır. Protonlar
hızlandıkça yörünge yarıçaplarını artırırlar. Elektrik alan
T
S
U
protonların hızını
artırırken, manyetik alan onları çembersel yörüngede dönmeye
M
.
zorlayacak
yR şşekilde hızlarının y
yönünü değiştirir.
ğş
D
bakan "D" şeklinde, içi boş iki adet iletkenden oluşur.
D' ler arasındaki boşlukta, f E frekansıyla titreşen bir
E
(28-31)
BÖLÜM-29
M
I
Elektrik Akımlarının Oluşturduğu IR
D
L
M
Manyetik
tik Alanlar
Al l
YI
A
L
Y
B bölümde,
Bu
bölü d elektrik
l k ik akımı
k
il oluşturduğu
ile
l
d ğ manyetik
ik alan
l arasındaki
d ki ilişkiyi
ili ki i
E
L
anlamaya çalışacağız. Bunun için, problemin .simetrisine
bağlı olarak iki
R
farklı yol izleyeceğiz.
izleyeceğiz
D
e
v
Simetrinin
S
e
düşük o
düşü
olduğu
duğu du
durumlarda
u a da
Biot-Savart
o S v
yasasını,
y
s s , yü
yüksek
se o
olduğu
duğu
T
A
durumlarda ise Amper yasasınıLkullanacağız.
O
P iletkenlerin oluşturdukları manyetik alanlar
Çok değişik geometrilere
sahip
A
her iki yaklaşımlaAF
da bulunabilir. Ayrıca, birbirine paralel iki iletken
arasındaki manyetik
y T kuvveti de hesaplayacağız.
p y ğ
S
U
M
.
R
D
(29-1)
Biot -Savart Yasası : Bu yasa, i akımı taşıyan dl uzunluğundaki bir iletkenin, kendisinden
r kadar
k d uzaktaki
kt ki bi
bir noktada
kt d oluşturduğu
l t d ğ dB manyetik
tik alanını
l
verir.
i
Solda i akımı taşıyan bir tel verilmiştir. Tel üzerinde akımla aynı
yönde, sonsuz küçük uzunlukta bir dl vektörü seçilir. i akımı taşıyan
bu parçanın, kendisinden r kadar uzaktaki P noktasında oluşturduğu
manyetik alan:
0i dl r
dB
4 r 3
ifadesi ile verilir. Burada r vektörü, iletken üzerinde seçilen dl vektör elemanından
M
I
R
.
R
A
L
O
P
A
L
Y
LE
I
D
L
YI
D
e
v
T
P noktasına çizilen vektördür. 0 4 107 T m/A ile verilen bir sabittir ve hava
yya da boşluğun
ş ğ manyetik
y
geçirgenliğidir.
g ç g ğ
, dl ile r vektörleri arasındaki açı
ç olmak
üzere, dB manyetik alanının büyüklüğü de:
A
F
A
T
0i dl sin
d
dB
4 r 2
S
U
M
.
ile verilir.
R
D
(29-2)
Sonsuz Uzun Telin Manyetik Alanı :
M
I
R
I
D
L
YI
Biot-Savart yasasına göre, sonsuz uzun düz bir telden eşit
uzaklıktaki noktalarda manyetik alan şiddeti aynı, yönü ise
sağ-el kuralına göre çevreseldir. Yani, teli merkez alan
çemberlere her noktada teğettir.
.
R
A
L
Y
LE
Sağ-el parmak uçları akım yönünü gösterecek şekilde dl
vektörünü avuçç içerisine
ç
yatırıp,
y
p, en küçük
ç açı
ç y
yönünde
r vektörü üzerine süpürürsek, başparmağımız manyetik
D
e
v
T
A
L
O
P diğer göster
alan yönünü gösterir.
gösterirABir
gösterim
im şekli de,
de sağ-el
sağ el
F gösterecek şekilde iletken tel
başparmağı akımAyönünü
T
S
avuç içerisine
i iU
i alınırak
l
k kkavranırsa, kalan
k l parmakların
kl
Mgösterdiği yön manyetik alan yönüdür.
uçlarının
.
R
D
(29-3)
Şekildeki tel üzerinde akımla aynı yönde bir dl elemanı
seçelim Bu elemanın P noktasında oluşturduğu manyetik
seçelim.
0 i dl r
alan dB
sayfadan
y
içeri
ç doğrudur
ğ
ve büyüklüğü,
y
ğ ,
3
4 r
0 i dl sin
dB
4
r2
ile verilir. Akım taşıyan tel sonsuz uzunlukta ise,
M
I
R
A
L
Y
LE
I
D
L
YI
.
R
P noktasında oluşturduğu toplam
manyetik alan:
D
e
i dlvsin
B dB
4AT r
L
r l P
O
R
sin sin R / r R / l R
A
i
i
i
R dl AF i
R dl
l
B
T
4 l S
2
2
R
2 R
l R
R
l R
U
M
dx.
x
DR
0
2
2
2
0
2
x a
2 3/2
2 3/2
0
0
2
0
2
2
2
2 3/2
0
2
2
0
a2 x2 a2
(29-4)
Yarı Sonsuz Telin Manyetik Alanı :
M
I
R
Sonsuz uzun tel için yapılan işlemlerin aynısı burada da
I
D
ş g
orijin
j olarak
kabul
tekrarlanacaktır. Telin başlangıcını
L
I
Y
edersek, tele dik yönde orijinden R kadar uzaktaki bir
A
L
P noktasındaki manyetik alan:
Y
E
L
.
i dl sin R
D
B dB
4 ver
T
r l R A sin sin R / r R / l R
L
O
Pi Rdl
i
i
l
A
FB
0
2
0
0
2
2
2
S
U
M
.
Dx R a
dx
2
2 3/2
A
T
0
4
0
2
l R
2
2 3/2
0
4 R l 2 R 2 0
0
4 R
x
a2 x2 a2
(29-5)
Sonlu Telin Manyetik Alanı :
Ş kild ki tell üzerinde
Şekildeki
ü i d akımla
k l aynı yönde
ö d bir
bi dl elemanı
l
seçelim. Bu elemanın P noktasında oluşturduğu manyetik
M
I
R
alan
l sayfadan
f d içeri
i i doğrudur
d
d ve bbüyüklüğü,
kl
I
D
L
YI
A
L
Y
E
L
ile verilir. Akım taşıyan telin uzunluğu
L ise, telin ortasından
.
R
R kadar
k d uzaktaki
kt ki bir
bi P noktasında
kt
d oluşan
l
manyetik
tik alan:
l
D
e
i
dlvsin
B dB
T r
4 A
L
r l P
R O sin sin R / r R / l R
A
F
A
i
i
i
i
R dlT
R dl
l
L
B
S
4 l U
2
2
R
4 R L / 2 R
R
l R
l R
M
.
dxR
x
xD
a a x a
dB
0 i dl sin
r2
4
L/2
L/2
0
2
L/2
L/2
2
L /2
2
0
L /2
2 3/2
2 3/2
2
2
2
0
0
2
L /2
L /2
0
2
2
2
2 3/2
0
2
2
2
0
2
2
(29-6)
Örnek : Üzerinden kararlı i akımı geçen,
uzunluğu
l ğ L olan
l ince
i
bir
bi tel,
t l şekilde
kild görüldüğü
ö üldüğü
gibi x-ekseni üzerindedir. x > L ve x < L olmak
üzere, x-ekseni üzerinde herhangi bir P(x,0)
noktasındaki manyetik alanı bulunuz.
0i dl r
dB
4 r 3
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e küçük dl elemanı ile, buradan
L uzunluğundaki tel üzerinde seçilen sonsuz
v
T
manyetik alanı bulmak istediğimizA
P noktasına çizilen r vektörü arasındaki
L
açı 0 olduğundan, dl r 0 O
olur ve x -ekseni üzerinde, x L şartını sağlayan
P
tü noktalarda
tüm
kt l d manyetik
tik
alan
l sıfırdır.
f d
A
F
A
T
S
Benzer bir durum
x
0
için
de
geçerlidir.
dl
vektörü
ile
r
vektörleri arasındaki
U
M
açı 180. olduğundan, dl r 0 olur ve x -ekseni üzerinde, x 0 şartını sağlayan
R
tüm
Dnoktalarda manyetik alan sıfırdır.
o
o
(29-7)
Örnek : Kenar uzunluğu l = 0.4 m olan kare bir halka,
M
I
R
şekildeki gibi, saat ibreleri yönünde 10 A şiddetinde bir
akım taşımaktadır. Karenin merkezindeki manyetik
alanın büyüklüğünü ve yönünü bulunuz.
.
R
A
L
Y
LE
I
D
L
YI
L uzunluğunda, i akımı taşıyan bir telden r kadar uzaktaki
manyetik alan:
0i
L
B
4 r L / 2 2 r 2
0i
l
r B
2
4 l / 2
A
F
S
U
.M
A
T
BT 4 B 4
R
D
A
L
O
P l
l / 2
4 10 7 10
l 2
2
D
e
v
T
l / 2
2
0i
1
2 l
2
2
0i
l 2
28.28 10 6 T
(29-8)
Çembersel Yay Parçasının Manyetik Alanı :
Şekildeki gibi,
gibi i akımı taşıyan R yarıçaplı çembersel bir yay
M
I
R
parçası olsun. Yayı gören açı radyan cinsinden ' dir. İletken
I
D
L
üzerinde
i d akımla
k l aynı yönde
d seçilen
il bir
bi dl elemanının
l
çemberin
b i
I
Y
merkezi C noktasında oluşturduğu manyetikAalan, Biot-Savart
L
Y
yasasından,
E
L
i dl sin 90 i dl .
dB
R
4
R
4 R
D
vi e
dl Rd dB T
d
4 R
A
L
O
ile verilir ve sayfa düzleminden
P dışarı doğrudur. Net manyetik alan:
i FA
i
B dB
d B
A
4T
R
4 R
S
U çember) (yarım çember) 2 (çember)
/M
2 (çeyrek
.
i
i
i
R
B
B
B
D
0
0
2
2
0
0
0
0
0
8R
0
0
4R
2R
(29-9)
Örnek : Kapalı bir halka gibi değerlendirebileceğimiz
M
I
R
yandaki kangal I akımı taşımaktadır. A noktasındaki
manyetik alan ifadesini bulunuz.
B Bç 2 BL / 2 BL
Bç
0i
4R
0i
2L
,
L/2
L/2
D
e
v
T L / 2 L / 2
0i
0i
l
2
2
4 R l R 0
4 ( L / 2)
BL / 2
L/2
0i
l
BL
4 R l 2 R 2 L / 2
0i
A
F
A
T
.
R
A
L
Y
LE
A
L
i
O
P 4 ( L / 2)
2
2
L
0
L / 2
2
L / 2
2
I
D
L
YI
0i
2 2 L
0i
2 L
,
,
0i
0i
0i 1
2
B
2
,
2L
L 2
2
2 2 L
2 L
S
U
M
.
R
D
(29-10)
Örnek : Yanda verilen kapalı halka I akımı
taşımaktadır. P noktasındaki manyetik alan
ifadesini bulunuz
bulunuz.
M
I
R
I
D
L
YI
A
L
Telin düz kısımlarının oluşturduğu manyetik alan Y 0
E
L
a ve b yarıçaplı yaylar P noktasında manyetik
alan oluşturur.
.
R
D
BB B
e
v
i
T
B
A
4 R
L
O
i i
P
B
,A
4 b 3 12b F
A
i ST
i
B
,
U
4M
a 3 12 a
.
i 1 1 i b a
R
BD B B
,
b
a
0
yay
b
0
0
0
0
a
a
b
0
12 a
b
0
12 ab
(29-11)
Çembersel Akım Halkasının Manyetik Alanı :
İletken üzerinde seçilen sonsuz küçük bir dl elemanının,
elemanının çemberin
merkezinden dik geçen z -ekseni üzerindeki P noktada oluşturduğu
manyetik alan
alan,
i dl sin 90 0i dl
dB 0
2
4
r
4 r 2
ile verilir. Doğrultusu ise z -ekseniyle açısı yapacak yöndedir.
Manyetik alanın z -eksenine dik bileşenlerinin (dB ) toplamı sıfır,
M
I
R
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
paralel bileşenlerinin (dB ) toplamı ise sıfırdan farklıdır.
A
L
O
P
0i dl cos
R
2
2
dB dB cos
; r R z ; cos
2
r
r
4
iR dl 0iR
dl
dB 0
B dB , (R ve z sabit)
3/2
3
4 r
4 R 2 z 2
A
F
S
U
A
T
0iR
0iR
M
dl
.
4R
R z
4 R
D
B
2
2 3/2
2
z
2 3/2
2 R B
0iR 2
2R z
2
2 3/2
(29-12)
Örnek : Yarıçapı R olan çembersel bir halka üzerinde düzgün
M
I
R
dağılmış toplam q yükü taşımaktadır. Halka, merkezinden geçen
ve yüzeyine dik eksen etrafında sabit açısal hızı ile dönmektedir.
Çember ekseni üzerinde ve çemberden z = R /2 kadar uzaktaki bir
noktada oluşan manyetik alan nedir?
.
R
I
D
L
YI
A
L
Y
LE
Çemberin z-ekseni etrafında dönmesi ile oluşan akım:
D
e
v
T
q
q
q
q
i
i
t
T 2 / 2
A
L
iR
iR
B O
B
P2 R R / 2
2R z
A
F
4 i
4 TqA
2 q
B
S
R 5 U
R 5 2 R 5
M
.
R
D
2
2
0
0
2
2 3/ 2
0
3
0
3
2
2
3/ 2
0 iR 2
2 R 1 1 / 4
3
3/ 2
0
3
(29-13)
Örnek : İç yarıçapı a ve dış yarıçapı b olan bir disk
düzgün yüzey yük yoğunluğuna sahiptir.
sahiptir Disk,
Disk
M
I
R
merkezinden geçen ve yüzeyine dik olan z -ekseni
etrafında
f d sabit
bi açısall hızı
h ile
il dö
dönmektedir.
k di Di
Diskin
ki
ekseni üzerinde ve disk merkezinden z kadar uzaktaki
P noktasında oluşan manyetik alanını ve diskin
.
R
manyetik dipol momentini bulunuz.
A
L
Y
LE
I
D
L
YI
D
e
v
a r b olacak şekilde, disk üzerinden
dr kalınlığında bir
T
Ageçen di akımı:
halka seçelim. Bu halkadan
L
O
P 2 rdr
q
2 rdr
d
di
di
d
rdr
d
A
FT
t
2 /
A
T
S
r rdr
UiR
r di
B M
dB
.
2 r z
2 r z
2
R z
R
D
2
0
0
0
2
2
2
2 3/ 2
2
2
3/ 2
2
2
3/ 2
(29-14)
0
b
r dr
3
M
I
R
I
D
2
L
x a I x a
z
Y
A
L
r 2 z
b 2 z
a Y
2z
B
E
2 r z
2 b z
La z
.
R
D
e
v
di akımı taşıyan r yarıçaplı halkanın manyetik dipol momenti,
T
A
L
d di r
O
P
şeklinde ifade edilir
edilir.ABuradan
Buradan, net manyetik dipol moment:
F
A
T
d S
rdr r r dr
b a
4
U
M
.
R
D
B dB
r
a
2
2
x3dx
2 3/2
2
b
2
0
2 3/2
2
2
2
x 2 2a 2
2
2
2
0
2
2
2
a
2
2
2
2
b
b
2
a
3
4
4
a
(29-15)
Amper Yasası : Akım dağılımının bilindiği durumda,
manyetik alanı bulmak için Biot-Savart
Biot Savart yasası ile birlikte
M
I
R
üstüste binme ilkesini kullandık. Akım dağılımındaki
I
D
L
simetri
i t i yüksek
ük k ise,
i Biot-Savart
Bi t S
t yasasının yerine
i I işlemlerin
i l l i
Y
kolaylığı nedeniyle Amper yasasını kullanacağız.
A
L
Y
E i akımı taşıyan
Amper yasasını, Biot-Savart yasasından türetebiliriz.LŞekilde
.
sonsuz uzun bir tel verilmiştir
verilmiştir. Teli merkez kabulReden r yarıçaplı çembersel
D
bir halka üzerinden B' nin çizgi integrali:ve
i
i AT
r i B dl i
2L
B dl 2 r dl cos 0 2O
r
Pseçilen halkanın geometrisinden bağımsız olduğuna
bulunur İntegral sonucunun
bulunur.
sonucunun,
A
F
dikkat ediniz. Bu sonAbağıntı Amper yasası olarak bilinir ve şöyle tanımlanır:
T
S
"Herhangi bir
kapalı eğri boyunca B dl integrali, ile kapalı halka içindeki
U
M
.
net akımın
ççarpımına
p
eşittir".
ş
R
D eğri "Amper halkası" olarak isimlendirilir.
Kapalı
0
0
0 iç
0
0
(29-16)
Amper Yasasının Uygulanması :
M
I
R
1. B dl integralinin belirlenmesi. Kapalı halka l1 , l2 , ..., ln
I
D
L
I
gibi n tane elemana bölünür ve B l BYl cos toplamı
A
L
Y
hesaplanır. Burada B , i. elemanın bulunduğu
yerdeki manyetik
E
L
alandır. n durumunda bu toplam:
.
DR
B dl lim B vleolur.
T
2.
i
'
in
hesaplanması.
Sağ-el parmak uçları kapalı halka
A
L
B
dl
i
O
üzerindeki
P hareket yönünü gösterecek şekilde halka kavranır.
A
F
A
Halka içinde başparmağımızla
aynı yönde olan akımlar pozitif alınır.
T
S
Halka içinde
başparmağımızla
ters yönde olan akımlar negatif alınır.
U
M akımların hiçbir katkısı yoktur.
Halka .dışındaki
R
D örnekte: i i i
Şekildeki
n
i 1
n
i
i
i 1
i
i
i
i
n
n
i 1
i
i
iç
0 iç
iç
1
2
(29-17)
Uzun Bir Telin Dışındaki Manyetik Alan:
M
I
R
i akımı taşıyan sonsuz uzun bir telin oluşturduğu manyetik
alan ççizgilerinin,
g
, teli merkez kabul eden ççemberler şşeklinde
I
D
L
olduğunu biliyoruz. Problem silindirik simetriye
YI sahiptir
ve teli merkez alan r yyarıçaplı
ç p bir çember
ç LA Amper
p halkası
Y
E büyüklüğü çemberin
olarak seçilebilir. Manyetik alanın
L
.
üzerindeki her noktada aynıdır ve yönü çembereRteğettir.
teğettir Bu durumda manyetik
D
e
alan,
v
T
B
dl
Bdl
cos
0
B
dl
d
l
2
rB
LA B
O
i
P
i iB
2F
rA
olarak bulunur. TA
S
Not : AmperU
yasası herhangi bir kapalı halka için geçerlidir.
M
.
Hesaplamalarda
p
kolaylık
y sağlaması
ğ
açısından
ç
en basit
R
D
0
0 iç
0
halkayı seçmek daha uygundur.
(29-18)
Örnek : Sonsuz uzunlukta dört tel, yandaki gibi, kenar
uzunluğu
l ğ 0.2
0 2 m olan
l bir
bi karenin
k
i kö
köşelerine
l i yerleştirilmiş,
l ti il i
sayfa düzleminden içeri ve dışarı doğru 5 A şiddetinde
akım taşımaktadırlar. Karenin merkezindeki net manyetik
alanı hesaplayınız.
1
r
2
0.2
2
0.2
2
A
L
Y
LE i
M
I
R
I
D
L
YI
2
m ; B A BB BC BD 0
10
2 r
.
R
D
e
v
T
0i
Bx 2 r sin 45 sin 45 sin 45 sin 45 0
0i
0i 2
2 0i
B
4
cos
45
4
y 2 r
2 r 2
r
A
F
A
T
2 0i ˆ
B
j
r
S
U
D
M
.
R
A
L
O
P
2 4 10 7 5 ˆ
j 2 10 5 ˆj
2
10
(29-19)
Örnek : Yanda, bir koaksiyel kablonun kesiti
verilmiştir.
il i i Merkezdeki
k d ki iletkenin
il k i taşıdığı
d akım
k
sayfa düzleminden dışarı doğru 1 A, dıştakinin
taşıdığı akım ise sayfa düzleminden içeri doğru
M
I
R
I
D
L
YI
A
L
Y
Şekilde gösterilen a ve b noktalarındaki manyetik LE
.
alanları bulunuz.
R
D
e
v
i
B
T
A
2 r
L
i
4 10 1PO
B
2 10 T (saat ibrelerinin tersi yönünde)
A
2 a 2 1
10
F
A
i
4S
T
10 3 1
B
U
1.33 10 T (saat ibreleri yönünde)
2 bM 2 3 10
.
R
D
3 A' dir. İç ve dış iletkenler plastikle kaplanmışlardır.
0
a
b
0 iç
7
4
3
0 iç
7
4
3
(29-20)
Uzun Bir Telin İçindeki Manyetik Alan:
M
I
R
Teldeki akımın, tel kesitine düzgün dağıldığını kabul edelim.
Telin taşıdığı
ş ğ akım i ve yyarıçapı
ç p R dir. Tel ile aynı
y merkezli,,
I
D
L
I
Y
r (r R) yarıçaplı bir Amper halkası seçelim. Manyetik
A
alanın büyüklüğü çemberin
çemberin üzerindekiL
her noktada aynıdır
Y
E manyetik alan,
ve yönü çembere teğettir. Bu durumda
L
.
R
B
dl
Bdl
D cos 0 B dl 2 rB
e
v
r
r
T
i i
i
A
R
R
L
O
P 2 rB i r B i r
A
R
2
R
F
iç
2
2
2
2
2
0
A
T
0
2
2
Amper halkasını telin dışında seçersek: 0iiç 0i olur
S
U
M
.
R
ve telin dışındaki manyetik alan:
DB
0i
2 r
ifadesine sahip olur.
(29-21)
Örnek : Yarıçapı R olan silindir şeklindeki bir iletken, şekilde
gösterildiği
ö ildiği gibi
ibi toplam
l I akımı
k
taşımaktadır.
k d Telin
T li kesitindeki
k i i d ki
akım yoğunluğu, b pozitif bir sabit olmak üzere, J br ifadesi
il verilmektedir.
ile
il kt di Telin
T li iiçinde
i d ve dışındaki
d d ki manyetik
tik alanları
l l
bulunuz ve tel ekseninden olan uzaklıkla değişimini çiziniz.
M
I
R
I
D
L
YI
A
L
Y
2 bR
E
L
I J 2 rdr 2 b r dr
(toplam akım)
.
3
R
D
r R : B dl Bdl cos 0 B dl 2erB
v
T
2 b r
A
i J 2 rdr 2L
b r dr
3
O
P
2 b r A
3I
b
I
B
2 rB
r
F
r
A
3
2 R 3
3
2 R
T
S
r R : B U
dl Bdl cos 0 B dl 2 rB
M
.
I bR 1
R
D i I 2 rBB I B 2 r 3 r
R
R
3
2
0
0
r
0 iç
r
0
3
2
0
2
0
0
0
0
3
0
0
2
3
0
3
2
r
3
0
0 iç
0
0
0
(29-22)
ÖDEV: Yarıçapı R olan silindir şeklindeki bir iletken telden toplam I akımı
akmaktadır. Telin kesitindeki akım yoğunluğu, J0 pozitif bir sabit olmak üzere,
IM
R
I
D
L
YI
r2
J J0 1 2
R
A
L
if d i il
ifadesi
ile verilmektedir.
il k di Telin
T li içinde
i i d ve dışındaki
d d ki bölgelerde
bölEY
l d manyetik
ik alanları
l l
L
.
bulunuz ve tel ekseninden olan uzaklıkla değişimini çiziniz.
R
D
e
v
T
A
L
O
P
A
F
A
T
S
U
M
.
R
D
(29-23)
Örnek : Genişliği l olan çok uzun metal bir şerit, şekildeki
gibi xy -düzlemindedir
düzlemindedir ve boyunca toplam I akımı taşımaktadır.
taşımaktadır
y -ekseni üzerinde ve şeritin kenarından b kadar uzaktaki bir
P noktasında manyetik alanını bulunuz.
bulunuz
A
L
Y
LE
M
I
R
I
D
L
YI
Metal şerit boyunca kalınlığı dy olan sonsuz uzun ince bir tel seçelim. Bu telin
taşıdığı akım di ( I / l ) dy ve P noktasında oluşturduğu manyetik alan:
0 di
dB
(pozitif z -ekseni yönünde)
2 l b y
.
R
D
e
v
u lb y
I
dy
T
B dB
;
duLA
dy
2 l l b y
O
I du
I
P
B
ln
l
b y
A
2 l
u
2 l F
A
I b T
I l b
B
ln S B
ln
2 l U
lb
2 l b
M
.
R
D
l
0
0
l
0
l
0
0
0
0
0
(29-24)
Örnek : Sonsuz genişlikte ve sonsuz uzunlukta çok ince metal
bir şerit xy -düzlemindedir
düzlemindedir ve kesitinde birim uzunluk başına K
M
I
R
akımı taşımaktadır. Şeritten z kadar yukarıdaki bir P noktasında
I
D
L
YI
manyetik alanını bulunuz.
bulunuz
A
L
Y
LE
Metal şşeritteki kesitinde, z -ekseninden x kadar uzakta kalınlığı
ğ dx olan sonsuz
uzun ince bir tel seçelim. Bu telin taşıdığı akım di Kdx ifadesine sahiptir ve P
noktasında oluşturduğu manyetik alan:
.
R
dB
0 Kdx
0 di
2 r 2 x 2 z 2
;
D
e
v
T
Bz dB sin 0
Bx dB cos 0
A
L
K
K
dx
z
dx
O
B B dB cos
P
2 x z
2
z
1 x / z
x z
A
F
tan x / z
A
1 tan d K
K
T
d
B
S
dx / z
2
1 tan
2
1 tan dU
M
K
K
.
B R
B
(Negatif x doğrultusunda)
(Negat
doğ u tusu da)
2
D 2
0
x
0
2
2
/2
2
2
2
2
/2
0
0
2
2
/ 2
0
/2
/ 2
0
/ 2
(29-25)
Paralel İki İletken Tel Arasındaki Manyetik Kuvvet :
Manyetik alan içinde bulunan akım taşıyan bir tel üzerine F = I l × B
RIM
I
ifadesi ile tanımlanan manyetik bir kuvvet etkidiğini biliyoruz. D
L
I
Y yönlerde
Yanda, aralarında a mesafesi bulunan, aynı
A
L
I ve I akımları taşıyan sonsuz uzunlukta
iki paralel
Y
E
L
verilmiştir. Her bir tel diğer. telin bulunduğu yerde
bi manyetik
bir
tik alan
l oluşturur.
l D
t R Bu
B nedenle
d l de
d birbirleri
bi bi l i
e
üzerine manyetikvkuvvet uygularlar.
T
A telin bulunduğu yerde oluşturduğu
I akımı taşıyan telin, I akımı yaşıyan
L
O
manyetik alan ve bu alan nedeniyle
P I akımı yaşıyan telin birim uzunluğuna
A
etkiyen manyetik kuvvet,
sırasıyla,
F
A
I ST
II
F
I
B
F I L
sin
i
90
U
L
2 a
2 a
2 a
M
.
ifadelerine
sahiptir.
p Sağ-el
ğ kuralına göre
g
bu kuvvet bir ççekim kuvvetidir.
R
D zıt yönlerde akım taşıması durumunda ise bu kuvvet iticidir.
Tellerin
1
2
2
1
1
2
0 2
21
1
0 2
o
21
0 1 2
(29-26)
Örnek : Sonsuz uzunlukta I1 akımı taşıyan
ş y bir tel,, şşekilde
gösterildiği gibi, düzgün geometriye sahip I 2 akımı taşıyan
kapalı bir halka ile kısmen çevrelenmiştir
çevrelenmiştir. Halka ekseni ile
tel çakışık olduğuna göre, halkaya etkiyen net manyetik
k
kuvveti
ti bulunuz.
b l
.
R
A
L
Y
LE
M
I
R
I
L ILD
Y
D
e
v
tersi yönünde çevreseldir. Bu nedenle, kapalı halkanın çembersel kısımlarına
T
A L uzunluğundaki kısımlarına etkiyen
kuvvet etki etmez. Halkanın düzL
olan
O
manyetik kuvvet:
P
A
I
F
F
I
L
(sağa doğru)
A
I
2 R
T
B
L
I
2 R US
(sağa doğru)
F I L
M
2 R
.
R
LI I
D
F F F
F
(sağa doğru)
I1 akımı taşıyan sonsuz uzun telin oluşturduğu manyetik alan saat ibrelerinin
0 1
sol
0 1
2
0 1
sağ
sol
sağ
2
0
1 2
R
(29-27)
M
I
R
Solenoid (bobin) :
.
R
A
L
Y
LE
I
D
L
YI
Boyu yarıçapının yanında çok büyük olan yalıtkan bir silindir üzerine yüzlerce
D
e
v
solenoid, yanyana sıralanmış çok sayıda
çembersel halkadan oluşmuş bir
T
A
L
sistem gibi düşünülebilir. Solenoidten i akımı geçtiğinde, solenoidin içinde
O
P eksenine paraleldir ve yönü sağ-el kuralıyla
oluşan manyetik alan solenoid
A
F uçları akım yönünü gösterecek şekilde solenoidi
bulunur. Sağ elin parmak
A
T
S
sağ aavuçç içine aldığımı
aldığımızda,
da başparmağımız
başparmağımı solenoidin içinde ol
oluşan
şan man
manyetik
etik
U
M gösterir. Solenoidin dışındaki manyetik alan ise çok zayıftır
alanın yönünü
.
veD
idRl solenoid
ideal
l id iiçin
i yaklaşık
kl k sıfır
f alınabilir.
l bili
veya binlerce defa helis şeklinde sıkıca sarılmış iletken telden oluşur. Böylece
(29-28)
Solenoidin içindeki manyetik alanı bulmak için Amper
M
I
R
yasasını kullanabiliriz. İdeal bir solenoid için, solenoidin
içindeki manyetik alan düzgün, dışındaki manyetik alan
I
D
L
ise sıfır kabul edilebilir. Solenoidin birim
YIuzunluğundaki
A
sarım sayısı n olsun.
L
Y
E halkasını alalım.
Amper halkası olarak şekilde gösterilen dikdörtgensel abcd
L
.
R
Halkanın uzun kenarları solenoidin eksenine paraleldir
ve biri solenoidin içinde
D
diğeri ise dışındadır. Amper yasasından: ve
T
B dl
B dl B dl B dl BO dlLA
P
A
B dl Bdl cos 0AFB dl Bh ve B dl B dl B dl 0
T
S
B dl MBhU ; i nhi
.
dl i Bh nhi B ni
DBR
b
c
d
a
a
b
c
d
b
b
b
c
d
a
a
a
a
b
c
d
iç
0 iç
0
0
Toplam sarım sayısı N ve silindirin boyu L olmak üzere n N / L dir.
(29-29)
Toroid :
M
I
R
Toroid,
T
id id
ideall bi
bir solenoidin
l idi bükülerek
bükül k simit
i it şekline
kli getirilmesi
ti il
i
ile oluşturulabilir. Kesiti aynı olmak koşuluyla, herhangi bir
geometriye
t i sahip
hi olabilir.
l bili i akımı
k
t
taşıyan
N sarım sayısına
sahip bir toroid olsun. Toroid içinde manyetik alan çizgileri,
toroid
id il
ile aynı merkezli
k li çemberlerdir
b l di ve manyetik
ik alan
l her
h
I
D
L
YI
A
L
Y
E
L
noktada çemberlere teğettir. Yönü
sağ-el kuralıyla bulunur.
.
R
S
Sağ-el
l parmakk uçları
l akım
k Dyönünü gösterecek
k şekilde
kild toroidi
idi
e manyetik alan yönünü gösterir.
kavrarsak, başparmağımız
v
T
Toroidin dışında
ise manyetik alan yaklaşık olarak sıfırdır.
A
L
O
P bir çember alır ve Amper yasasını uygularsak:
Amper halkası olarak r yarıçaplı
A
F B dl 2 rB ve i Ni
B
dl
Bdl
cos0
A
T
S
Ni
2 rB M
U
Ni B
2 r
.
R
bulunur.
D
iç
0
0
(29-30)
Manyetik Dipolün Oluşturduğu Manyetik Alan:
M
I
R
i akımı taşıyan R yarıçaplı çembersel bir halkanın, merkezinden
I
D
dik olarak geçen z -ekseni
ekseni üzerinde, merkezden z kadar
uzaktaki
L
I
Y
bir P noktasında oluşturduğu manyetik alan,
A
L
iR
Y
B
E
L
2R z
.
R k uzakk noktalarda
b
bağıntısı
il verilir.
ile
ili Çemberden
b D
d çok
k l d ( z R) :
e
v
iR
iR i R
iA
B
T
z
2z
2A
2 z
2 z
2 z
L
olur. BuradaO , halkanın manyetik dipol momentidir. Vektörel
P
f
formda
dA manyetik
ik alan:
l
F
A
ST B ( z )
2
0
2
2 3/2
2
0
2
0
3
2
0
3
0
3
0
3
3
0
D
.
R
U
M
2 z 3
olur. Halkanın oluşturduğu manyetik alan, çubuk mıknatısın
oluşturduğu
l t d ğ manyetik
tik alanla
l l aynı formdadır.
f
d d
(29-31)
BÖLÜM-30
Ö Ü
İndüksiyon ve İndüktans
M
I
R
I
D
L
YI
A
L
Y
E
L
Bu bölümde aşağıdaki konulara yer verilecektir:
.
R
D
Faraday indüksiyon yasası
e
Lenz kuralı
v
M
Manyetik
tik alandaki
l d ki değişimle
d ği i A
l T
indüklenen
i dükl
elektrik
l kt ik alan
l
L
Öz-indüktans ve karşılıklı
indüktans
O
P
RL devreleri
A
F depolanan enerji
Manyetik alanda
A
T
S
U
M
.
R
D
(30–1)
Faraday' ın Yaptığı Deneyler ve
Faraday
y İndüksiyon
y Yasası :
M
I
R
1830' lu yıllarda, İngiltere'de Michael Faraday ve Amerika
ş Devletleri'nde Joseph
p Henry,
y batarya
y kullanmadan
Birleşik
elektrik akımı üretilebilen önemli deneyler yaptılar. Aşağıda
A
L
Y
LE
I
D
L
YI
y yyasası" olarak bilinen bağıntıyı
ğ y elde
"Faradayy indüksiyon
etmede yardımcı olabilecek bazı deneyler anlatılacaktır.
.
R
Yukarıda,, duyarlı
y
bir ampermetrenin
p
bağlı
ğ olduğu
ğ kapalı
p halka şşeklinde bir devre
verilmiştir. Devreye kalıcı bir mıknatıs yaklaştırdığımızda, ampermetreden bir akım
geçtiği görülür. Yapılan birçok denemeden çıkan sonuçlar şöyle özetlenebilir:
D
e
v
T
A
L
O hareketli ise, halkada akım oluşmaktadır.
1. Halka ile mıknatıs birbirinePgöre
A
2. Hareket ne kadar hızlı
ise, akım o denli şiddetli olmaktadır.
F
A
3. Hareket yönü tersine
çevrilirse veya mıknatısın kutbu değiştirilirse, halkadaki
T
S
akım da yön
değiştirerek ters yönde akar.
U
M
.
R
BuDşekilde oluşturulan akıma "indüklenen akım", halkada oluşan emk' ya
"indüklenen emk" ve olayın kendisine de "indüksiyon" denir.
(30–2)
Yandaki şekilde karşılıklı duran iki halka verilmiştir.
1 nolu
l halkanın
h lk
b l d ğ devredeki
bulunduğu
d
d ki S anahtarı
ht
kapatıldığında veya kapalı iken açıldığında, 2 nolu
M
I
R
I
D
L
h lk
halkaya
bbağlı
ğl ampermetreden
t d akım
k geçtiği
tiği
görülür.
ö ülü
I
Y
1 nolu halkadaki akım sabit olduğu
sürece, 2 nolu
A
L
h lk d herhangi
halkadan
h h i bi
bir akım
k geçmez.
Y
E
L
Bu iki indüksiyon deneyinde,.manyetik alan ya mıknatısla
ya da
d akım
k geçirilen
i il bir
bi D
telle
llRoluşturulabilmektedir.
l
l bil k di
e
v
Faraday yaptığı bu deneylerin sonucunu "Faraday' ın indüksiyon yasası" olarak
T
A
bilinen aşağıdaki ifade ile özetlemiştir:
L
O
p bir halkadan g
geçen
çP manyetik
y
alan ççizgilerinin
g
sayısı
y değişirse,
ğş
,
Kapalı
A
F (emk indüklenir).
halkada bir emk oluşur
A
T
S
Faraday yasasıUsadece indüksiyonu açıklamakla kalmaz aynı zamanda indüksiyonun
M
tarifini de
yapar. Maxwell' in elektromanyetizma ile ilgili dört denkleminden birisidir.
.
R
D
(30–3)
Manyetik Akı (Φ ) :
B
M
I
R
Kapalı bir halkanın sınırladığı bir yüzeyden
I
geçen
g
ç manyetik
y
akı şşu şekilde
ş
bulunur:
LD
I
BY
dA
A
1. Kapalı
p halkanın sınırladığı
ğ yyüzey,
y, alanı dA olan sonsuz küçük
ç yüzey
y Ly elemanına bölünür.
Y
2. Her bir yüzey elemanından geçen manyetik akı hesaplanır: dE
BdA cos .
L
.
Burada , dA elemanının bulunduğu noktada yüzeyin normali
nˆ ile manyetik
R
D
alan B arasındaki açıdır.
ve
3. Tüm akılar toplanır:
p
BdA cos T
B dA ((T m Wb).)
A
Eğer halkanın sınırladığı yüzeydenLgeçen manyetik alan düzgün ise manyetik akı
O
B. A BA cos ifadesiP
ile bulunur.
A
F yasası şu şekilde de tarif edilir:
Faraday indüksiyon
A
Tindüklenen emk'
İletken halkada
emk nın büyüklüğü ( ),
) halkadan geçen
S
U
d
M
manyetik
akının
(Φ
)
zamanla
değişim
hızına
eşittir.
.
dt
R
D
d
B
B
B
2
B
B
B
N sarım sayısına sahip bir kangalda indüklenen emk: N
dt
B
(30–4)
Bir halkadan geçen akıyı değiştirmenin yolu :
Manyetik alan içerisinde bulunan bir halkadan geçen manyetik akı B :
B B dA BdA cos
M
I
R
A
L
Y
LE
I
D
L
YI
genel ifadesine sahiptir. Bu ifadeye göre, halkadan geçen manyetik akıyı
değiştirmenin üç yolu vardır:
1. Halkanın içinde
ç
bulunduğu
ğ manyetik
y
alanın büyüklüğünü
y
ğ
değiştirmek.
ğş
.
R
D
e
v
T
2. Manyetik alan içindeki halkanın yüzey alanını değiştirmek.
3 Halkanın yüzey normali nˆ ile B manyetik alanı arasındaki açısını
3.
değiştirmek.
A
F
S
U
A
L
O
P
A
T
M
.
R
D
(30–5)
Örnek : Kenar uzunluğu 18 cm olan kare şeklindeki bir kangalın sarım sayısı
200 ve toplam direnci 2 ' dur.
dur Kangal yüzeyine dik yönde uygulanan manyetik
M
I
R
alanın şiddeti 0.8 s içinde 0' dan 0.5 T' ya düzgün olarak artırılmaktadır. Kangalda
I
D
L
indüklenen emk' yıı vee akımı hesaplayınız.
hesapla ını
YI
A
B A 0 0.5 (0.18) 0.0162 T m L
Y
E
200 0.0162
N
4.05
L
.
4.05 V i
2A
R
t
08
0.8
R
2
D
e
v
Örnek : Yüzey alanı A olan bir kangal,
yüzeyine dik yöndeki bir manyetik alan
T
A
L
içine konuyor. Manyetik alanınO
şiddeti, a bir sabit olmak üzere, B B e
P göre
ifadesine uygun olarak değiştiğine
göre, kangalda indüklenen
indüklenen emk'
emk yı bulunuz
bulunuz.
A
F
A
T
d
S
BA AB e
AB e a aAB
AB e
U
dt
M B manyetik alanın maksimum değeri,
Burada
.
R
D aAB ise indüklenen emk'nın maksimum değeri.
s
i
2
s
ind .
2
ind .
ind .
at
0
at
0
ind .
at
0
at
0
0
0
(30–6)
Örnek : Uzunluğu L olan bir iletkeni, şekilde gösterildiği
gibi, sayfa düzleminden içeri doğru olan düzgün bir manyetik
alan içinde alana dik yönde sağa doğru sabit bir v hızıyla
hareket ettirelim. İletkenin
İ
iki ucu arasında oluşan potansiyel
farkını bulunuz.
M
I
R
I
D
L
YI
A
L
Y
Eelektronlar aşağıya
İletken sağa doğru sabit bir hızla hareket ettiğinde,
L
.
R
doğru F evB büyüklüğünde bir kuvvetin
etkisinde kalır ve iletkenin
D
e Yük ayrışması sonucunda da
iki ucu arasında bir yük ayrışması oluşur.
v
il tk i uçları
iletkenin
l arasında
d bi
bir potansiyel
tATi l farkı
f k oluşur.
l
Bu
B şekilde
kild iletkenin
il tk i
L
O
uçları arasında manyetik kuvvete
zıt yönde bir elektrik kuvveti oluşur.
P
Yük kutuplanmasınınAartışı ile elektrik kuvvetinin değeri de artar.
F
A
Kararlı denge durumu
oluştuğunda:
T
S
V
F F MU
evB eE e
V BLv
L
.
R
bulunur.
Bu potansiyel farka indüklenmiş emk denir.
D
B
B
E
ind
(30–7)
Örnek : Uzunluğu L ve kütlesi m olan bir iletken, şekilde
M
I
R
gösterildiği
ö ildiği gibi,
ibi sayfa
f düzleminden
dü l i d içeri
i i doğru
d ğ olan
l düzgün
dü ü
bir manyetik alan içinde, sürtünmesiz iki iletken ray üzerinde
alana dik yönde sağa doğru v0 ilk hızıyla harekete başlıyor.
A
L
Y
LE
İletkenin hızını zamanın fonksiyonu olarak bulunuz. İletken
telde indüklenen akımı ve emk' yı bulunuz.
.
R
I
D
L
YI
ind
dv
dv
B 2 L2
BLv
F ma m
ILB
LB
dt
LB
dt
R
v
mR
R
D
e
v
T
Av
B L
L
dt Oln v mR
P
A
BLv BL AF
I
vTe
R
RS
U
M
.
R
IR BLv e
D
v
v0
2 t
dv
B L
v
mR
2
2
t
v ( t ) v0 e
B 2 L2
t
mR
0
0
0
0
2
B 2 L2
t
mR
B 2 L2
t
mR
(30–8)
Lenz Kuralı :
dB
dt
M
I
R
Faraday yasasında yer alan () işareti, indükleme
I
D
L
yoluyla
l l oluşan
l
akımın
k
yönü ile
il il
ilgilidir.
ilidi I İndükleme
Y İ d kl
A Lenz kuralına
ile oluşan akım ya da emk' nın yönü
L
Y
göre belirlenir. Lenz kuralı:
E
L
.
R
İndükleme ile oluşan akım
akım, halkadan geçen
geçenmanyetik
manyetik
akıdaki değişimi
D
e
engelleyecek şekilde bir manyetik alan oluşturacak
yöndedir.
v
T
A
Şekilde, halkaya yaklaştırılan bir L
mıknatıs verilmiştir. İndüklenen akım şekilde
O
gösterilen yöndedir. Çünkü,P
Lenz kuralına göre indüklenen akımın sağa doğru bir
A
F gerekir. Halka, kuzey kutbu mıknatısın kuzey kutbuna
manyetik alan oluşturması
A
Tgibi düşünülebilir
yakın bir mıknatıs
düşünülebilir. Bu yüzden
yüzden, mıknatısın kendisinde mendana
S
U
M akıdaki artışı engelleyebilmek için kendisine yaklaşan mıknatısı
getirdiği. manyetik
i DkRi
itecektir.
İndüklenmiş akımın
oluşturduğu indüklenmiş
Bi manyetik
tik alan
l çizgileri
i il i
(30–9)
Örnek -11 : Çubuk mıknatısın N kutbunun
M
I
R
I
halkaya yaklaştırılması.
D
A
L
Y
LE
L
I
Y
.
Çubuk mıknatıs halkaya yaklaştırıldıkça, halkanın
merkezinde sola doğru
R
D
oluşturduğu BM manyetik alanının şiddeti
ve zamanla artar. Böylece, halkadan
T kuralına
geçen B manyetik
tik akısı
k da
d artar.
t AL
Lenz
k l göre,
ö indüklenen
dükl
akım
k saatt
L
O
P sağa
ibrelerinin tersi y
yönde akarak
ğ doğru
ğ Bi indüklenmişş manyetik
y alanını
A
F
oluşturur ve halkanın
A merkezindeki net manyetik alan Bnet BM Bi olur.
T
S
Böylece, indüklenen
akım manyetik akıdaki artışı engellemiş olur.
U
M
.
R
D
(30–10)
Örnek - 2 : Çubuk mıknatısın N kutbunun
M
I
R
I
halkadan uzaklaştırılması.
D
A
L
Y
LE
L
I
Y
Çubuk mıknatıs halkadan uzaklaştırıldıkça,. halkanın merkezinde
R
D
sola doğru oluşturduğu BM manyetik
alanının
şiddeti zamanla azalır.
e
v
T
Dolayısıyla halkadan geçen
Dolayısıyla,
azalır. Lenz
AB manyetik akısı da azalır
L
O
kuralına göre, indüklenen
akım saat ibreleri yönünde akarak sola
P
A
Falanını oluşturur ve halkanın merkezindeki net
doğru Bi manyetik
A
T
S
manyetik
tik alan
l
Bnet BM Bi olur.
l Böylece,
Bö l
indüklenen
i dükl
akım
k
U
M
.
y
akıdaki azalmayı
y engellemiş
g
olur.
manyetik
R
D
(30–11)
Örnek - 3 : Çubuk mıknatısın S kutbunun
M
I
halkaya yaklaştırılması.DIR
.
R
A
L
Y
LE
L
I
Y
D merkezinde sağa doğru
Çubuk mıknatıs halkaya yaklaştırıldıkça,ehalkanın
v
T zamanla artar.
oluşturduğu BM manyetik alanınınAşiddeti
artar Böylece,
Böylece halkadan
L
O
geçen manyetik akısı da
artar.
kuralına göre, indüklenen akım saat
P Lenz
A
F sola doğru B manyetik alanını oluşturur ve halkanın
ibreleri yönünde akarak
A
T
St manyetik
merkezindeki
k i d kiUnet
tik alan
l B B B olur.
l Böylece,
Bö l
iindüklenen
dükl
M akıdaki artışı engellemiş olur.
akım manyetik
.
R
D
B
i
net
M
i
(30–12)
Ö k -4: Ç
Örnek
Çubuk
b k mıknatısın
k
S kutbunun
k b IM
R
I
halkadan uzaklaştırılması.
D
.
R
A
L
Y
LE
L
I
Y
Ç b k mıknatıs
Çubuk
k
halkadan
h lk d uzaklaştırıldıkça,
kl
ld kD halkanın
h lk
merkezinde
k i d
e
v
sağa doğru oluşturduğu BM manyetik
T alanının şiddeti zamanla azalır.
A
Böylece, halkadan geçen B Lmanyetik akısı da azalır. Lenz kuralına
O
P ibrelerinin tersi yönünde akarak sağa
göre indüklenen akımAsaat
göre,
F
A
doğru B manyetik
alanını oluşturur ve halkanın merkezindeki net
T
S
U
manyetik alan
B B B olur. Böylece, indüklenen akım manyetik
M
.
akıdaki
azalmayı engellemiş olur.
R
D
i
net
M
i
(30–13)
İndüksiyon ve Enerji Transferi :
M
I
R
Lenz kuralına göre, indüklenen akım kendisini doğuran
dış etkiye bir tepki olarak doğar. Bu nedenle, dış etki
manyetik alan-halka sistemi üzerine bir iş yapar. Bu iş
halkanın R direnci üzerinde ısı enerjisi olarak açığa çıkar.
.
R
A
L
Y
LE
I
D
L
YI
Şekilde genişliği L olan iletken bir halka verilmiştir.
Halkanın bir bölümü düzgün B manyetik alanı içindedir
ve sabit bir v hızıyla alan dışına çıkarılıyor. Herhangi
bir anda, halkadaki manyetik akı B BA BLx ' dir.
D
e
v
T
A
L
O
Halkadaki
akının azalma hızı (indüklenen emk) ve
P
A
F indüklenen akım sırasıyla,
S
U
M
.
R
A
T
dB
dx
BL
dt
dt
ifadelerine sahiptir.
BLv
BLv ve i
R
R
D
(30–14)
R direnci üzerinde birim zamanda açığa çıkan ısı enerjisi,
M
I
R
2
2 2 2
BLv
B
Lv
(Eş-1)
Pısı i 2 R
R
R
R
il verilir.
ile
ili Halkanın
lk
k
kenarlarına
l
etkiyen
ki
manyetik
ik kkuvvetler
l
şekil üzerinde gösterilmiştir. F2 ve F3 kuvvetlerinin toplamı
sıfırdır. Halkaya etkiyen tek manyetik kuvvet F1 kuvvetidir:
BLv
B 2 L2v
F1 iL B F1 iLB sin 90
LB
R
R
Bu durumda, halkayı sabit bir v hızıyla alan dışına çekmek
.
R
A
L
O
P
A
L
Y
LE
I
D
L
YI
D
e
v
T
için eşit büyüklükte ve ters yönde bir dış kuvvet uygulamak
gerekir. Bu kuvvetin birim zamanda yapacağı iş:
A
F P
S
U
D
M
.
R
A
T
B 2 L2v 2
(Eş-2)
dış F1v
R
E 1 ve Eş-2
Eş-1
E 2 karşılaştırılırsa,
k l t l
hhalkayı
lk alan
l dışına
d
çıkarmak
k
k
için uygulanan dış kuvvetin yaptığı işin, halka üzerinde ısı
enerjisine
ji i dönüştüğü
dö ü tüğü görülmektedir.
ö ül kt di
(30–15)
Örnek : Kenar uzunlukları l ve w olan dikdörtgensel bir halka,
şekildeki
kild ki gibi,
ibi sabit
bi bi
bir v hhızıyla
l sayfa
f düzleminden
dü l i d iiçerii ddoğru
ğ
olan düzgün bir manyetik alana soldan giriş yaparak sağ taraftan
çıkıyor.
k
M
Manyetik
ik alanın
l
etkin
ki olduğu
ld ğ bölgenin
böl i genişliği
i liği 3w' dur.
d
A
L
Y
LE
Halkadan geçen manyetik akıyı ve halkada oluşan indüksiyon
emk'
k' sını bulunuz
b l
ve konumla
k
l nasıll ddeğiştiğini
ği iği i çiziniz.
i i i
0
I
D
L
YI
0
D
e
v
Blx
Halkanın x kadarı alanın içinde
T Blv
A
L
Blw
O
Halkanın tamamı alanın içindeP
0
A
F
Bl w x
A
Halkanın x kadarı alanın
dışınd
a
T
Blv
S
U
Halka alanın
dışında
0 ; 0
M
.
R
D
H lk alanın
Halka
l
d
dışında
d
.
R
M
I
R
;
(30–16)
Örnek : Kenar uzunlukları L ve w olan dikdörtgensel bir
halka,
h
lk şekildeki
kild ki gibi,
ibi I akımı
k
t
taşıyan
sonsuz uzun bir
bi ttelden
ld
h kadar uzaktadır.
M
I
R
I
D
L
a ) Halkadan
H lk d geçen manyetik
tik akıyı
k bulunuz.
b l
I
Y
bt ifadesine göre
b) Telden geçen akım, a ve b pozitif sabitler olmak üzere, I a A
Lü ve yönünü
d ği i halkada
değişirse
h lk d oluşan
l
indüksiyon
i dük i
emk'
k' sının büyüklüğünü
bü üklüğü
ö ü ü bbulunuz.
l
Y
E
L
a ) Halka üzerinde seçilen şeritten geçen akı:R.
D
LI
dr
I
e
d BLdr
v
Ldr
2
r
2 r
T
A
LI
LI L w
ln r O ln 1
P2 h
2
A
L w dI
Lb w
d
F
ln 1
ln 1
b )
A
2
2
dt T
h dt
h
S
U
Halka içinden
geçen akı sayfa düzleminden içeri doğrudur ve büyüklüğü
M
.
artmaktadır.
R
D
İndüklenen
emk saat ibrelerinin tersi yönünde akım oluşturacak yöndedir.
hw
0
0
h
0
hw
0
h
0
0
(30–17)
Örnek : İki kapalı bölmeden oluşmuş iletken bir halka,
şekildeki gibi,
gibi yüzeyine dik ve sayfa düzleminden içeri
doğru yönelmiş bir manyetik alan içindedir. a = 65 cm
M
I
R
ve iletkenin birim uzunluğunun direnci 0.1
0 1 /m'
/m dir.
dir
Manyetik alan şiddeti B (1103 T/s) t ifadesine
ugun olarak değişiyorsa,
değişiyorsa PQ kolundan geçen indüksiyon
akımını bulunuz.
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
d
dB
Büyük halka: 1
2a 2
R1 0.1 halka çevresi=0.1*6 a 0.6 a
dt
dt
1 2 a dB 2 (0.65)
3
i1
1
10
2.17 mA (saat ibrelerinin tersi yönünde)
R1 0.6 dt
0.6
A
F
A
L
O
P
d
dB
Küçük halka: 2
a2
R2 0.1 4 a 0.4 a
dt
dt
2
a dB (0.65)
3
1.63 mA (saat ibrelerinin tersi yönünde)
i2
1
10
R2 0.4 dt
0.4
S
U
A
T
M
.
R
PQ kolundaki ne akım: i i1 i2 0.54 mA (saat ibrelerinin tersi yönünde)
D
(30–18)
ÖDEV : Birim uzunluğunda n tane sarımı olan bir
solenoidten geçen akım zamanla I (t ) I m (1 e
t
M
I
R
)
ifadesine uygun
g n olarak değişmektedir
değişmektedir. Solenoidin
merkezinde ve solenoid ile aynı eksenli N sarım
sayısına ssahip
ahip R yarıçaplı halkada indüklenen emk' yı
bulunuz.
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
T
ÖDEV : Kararlı
K
l I akımı
k
taşıyan sonsuz
bi tell ile
il
A uzun bir
L
kenar uzunluğu l ve a olan birO
kangal, şekildeki gibi,
P
aralarındaki
l
d ki mesafe
f r olacak
lA k şekilde
kild aynı düzlemde
d l d
F
A
durmaktadır. Kangal
sabit bir v hızıyla, akım taşıyan
T
S şekilde hareket ettirilirse, kangalda
tele paralel U
kalacak
M emk ne olur?
indüklenen
.
R
D
(30–19)
Örnek : Kesitinin kenar uzunlukları a = 2 cm ve b = 3 cm, iç
yarıçapı R = 4 cm olan N
N=500
500 sarımlı bir toroidin taşıdığı akım
I t = 50sin 120 t ifadesi ile değişmektedir. Burada, t saniye
ve I Amper cinsindendir.
cinsindendir Şekildeki gibi
gibi, toroidi çevreleyen N
N'=20
=20
sarımlı dikdörtgen şeklindeki halkada oluşan indüksiyon emk' sını
zamanın fonksiyonu olarak bulunuz.
bulunuz
Toroidin içindeki manyetik
y
alan: B
0 IN
2 r
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
Toroidin kesitinden geçen manyetik akı:ve
T dr
IN
AINa
IN
IN
INa R b
d
d BdA
a
.
dr
ln
L
2 r
2
r
2
R
O
P
a R b dI
NN
N d
A
dI
F
ln
50*120 cos 120 t
dt
2
R dt
A
dt
T
4 10 S
500 20 0.02
0 02 7
U
ln 50 120 cos 120 t
M 2
4
.
R
0 42 cos 120 t
D 0.42
R b
0
0
0
R
0
7
(30–20)
İndüklenen Elektrik Alanlar:
M
I
R
Şekilde, r yarıçaplı bakır bir halka verilmiştir. Halka,
I
D
L
YI
R yarıçaplı bir bölgede etkin olan, sayfa düzleminden
içeri doğru yönelmiş ve şiddeti zamanla artan düzgün
A
L
Y
LE
bir manyetik
y
alan içindedir.
ç
Halkadan geçen
g ç manyetik
y
akıdaki değişim nedeniyle indüklenen akımın yönü saat
.
ibrelerinin tersi yönünde
olacaktır
olacaktır.
R
D
e içindeki elektronların hareket
v
İletken halkada bir i akımının olması, iletkenin
T
A varlığı anlamına gelir. Bu son yorumun
etmesini sağlayan bir E elektrik alanının
L
O
da ışığı
ş ğ altında Faraday
y yyasası:
P
A
F alan bir elektrik alan indükler.
A
Değişen manyetik
T
S
U
biçiminde
de
ifade edilebilir.
M
.
NotR
Bakır halka olmasa bile
bile, indükleme ile bir elektrik alan oluşur.
oluşur
D ::Bakır
(30–21)
Soldaki şekilde, bakır halka yerine r yarıçaplı çembersel
bir yol çizilmiştir. Bu yol boyunca indüklenen emk,
E dl
(Eş-1)
M
I
R
A
F
S
U
M
.
R
A
T
I
D
L
I
Y
ile verilir. Aynı emk Faraday yasası ile de verilebilir:
A
L
dd
Y
(
(Eş-2)
)
E
dt
L
.
Bu iki eşitlik birleştirilirse,
R
d e D
E dl dt
v
T
Aelde edilir. Çember üzerinde elektrik alan,
bağıntısı
L
O
PE dl Edl cos 0 E dl 2 rE
rd
dB
B
d
dB
r B
r2
dt
dt
olarak bulunur.
2
E
2 dt
D
(30–22)
Örnek : Birim uzunluğundaki sarım sayısı n olan R yarıçaplı
uzun bir
bi solenoidten
l id geçen akım
k
I t = I m cos t ifadesine
if d i
M
I
R
I
D
L
YI
göre değişmektedir. Solenoidin içinde ve dışındaki noktalarda
indüklenen elektrik alanını bulunuz.
A
L
d
d ( B. A cos 0) Yd
r R E dl
E 2 r
nI R
E
L dt
dt
dt
.
R
nR dI
nR
E
sin t
I D
2 r dt
2r
e
v
T
nR I
nR I
E
t E sin t ; E
A
sin L
2r
2r
O
d P
d ( B. A cos 0)
d
r R E dl A E 2 r
nI r
F dt
dt
dt
A
T
r
dI r
S
E n
n I sin
i t
U
dt 2
2
M nr I
.
nr I
R
E
sin
t
E
sin
t
;
E
D
2
2
2
0
2
2
0
0
2
m
2
m
0
m
m
0
m
2
0
0
0
0
m
m
m
m
0
m
(30–23)
İndüktans :
M
I
R
Toplam sarım sayısı N , kesit alanı A ve uzunluğu l olan
bir solenoidten i akımı geçtiğinde, içindeki manyetik alan
I
D
L
B ni ve solenoidten geçen net manyetik
YIakı NBA
A
ile verilir. Burada n, solenoidin birimLuzunluğundaki
sarım
Y
sayısıdır (n N / l ).
E
L
.
R
T l sarım sayısı N nll olduğundan
Toplam
ld ğ d nett manyetik
tik akı,
k
D
e i
N ( BA) N niA n lA
v
T
A geçen i akımıyla doğru orantılı olduğuna
olacaktır. Net manyetik akının, solenoidten
L
O
dikkat ediniz. Solenoid için bulunan
P bu sonuç, herhangi bir indüktör için de geçerlidir
ve net manyetik akı: A
Li formundadır. Orantı sabiti L, indüktörün "indüktans" ı
F
olarak tarif edilir T
veA
ilgili indüktörün geometrisine bağlıdır. Bu durumda solenoidin
indüktansı, US
M n lAi
.
L R
n lA T.m
T m /A Henry (H)
i
D i
B
0
2
B
0
0
B
B
olur.
2
0
2
2
0
(30–24)
Öz - İndüksiyon
y :
M
I
R
Sağdaki resimde, 1 nolu halkadaki
akımın değişmesiyle
ğş
y 2 nolu halkadan
geçen manyetik akıdaki değişimin bir
emk indüklediğini
ğ daha önce ggördük.
.
R
A
L
Y
LE
I
D
L
YI
D
e geçen akım zamanla değişiyorsa,
Bir indüktör üzerinden
v
T
indüktörden geçen
net manyetik akı da,
da (t ) Li (t )
A
L
bağıntısı
uyarınca zamanla değişir. Böylece, Faraday
O
P göre indüktörde "öz-indüksiyon
yasasına
öz-indüksiyon emk
emk" sı olarak
A
AFbilinen bir emk indüklenir:
B
T
S
U
M
.
R
dB
di
L
dt
dt
D
(30–25)
RL Devreleri :
Yanda seri bağlı bir R direnci ile indüktansı L olan bir indüktör
verilmiştir. L' nin açık ucu emk' sı olan bir bataryaya, R' nin
açık ucu ise bataryanın diğer ucuna bir S anahtarı le bağ
bağlıdır.
lıdır.
Başlangıçta açık olan anahtar t 0 anında a noktası ile temas
ettirilerek devre tamamlanıyor. x noktasından başlayarak saat
ibreleri yönünde Kirchhoff' un çevrim kuralını uygularsak,
di
di
iR
R L 0 L iR
R
dt
dt
M
I
R
.
R
A
F
i
A
L
O
P
di iR
di
d
dt
dt
L
iR L
D
e
v
T
t
di
ddt
0 iR 0 L
1
t
i
ln iR 0
i(t ) 1 et /
R
L
R
A
T
A
L
Y
LE
I
D
L
YI
S
Burada, L /UR ile verilir ve RL devresinin "zaman sabiti" dir. T
M
.
R
RL devresinin
RL
yarılanma ömrü
ömrü olarak bilinir.
bilinir
D
L
ln2 niceliği ise
1/2 =
R
(30–26)
L / R olmak
l k üüzere, herhangi
h h i bir
bi t anında,
d
M
I
R
I
D
L
YI
ç akım: i(t ) 1 et /
Devreden ggeçen
R
Direncin uçları arasındaki gerilim: VR iR 1 et /
A
L
Y
di
E
İndüktörün uçları arasındakiLgerilim: V L e
.
dt
R
bağıntıları ile verilir.Dt 0 anında, beklentilere uygun
e
v
bir şekilde devreden geçen akım sıfırdır (i 0). Anahtar
T
A uzunca bir süre sonra (t ), devredeki
kapatıldıktan
L
O
akım
P i / R ile verilen maksimum değerine ulaşır.
A
F Tam bu noktada indüktörün kısa devre gibi davrandığını
L
t /
max
S
U
A
T
y
yyanlışş olmaz.
söylemek
M
.
R
D
(30–27)
Manyetik Alanda Depolanan Enerji :
M
I
R
Bir kapasitörün palakaları arasındaki bölgede elektrik alanda
enerji depolayabildiğimizi biliyoruz. Benzer bir mantıkla, bir
I
D
L
I
indüktörün içindeki manyetik alanda da enerji depolayabiliriz.
Y
Yandaki devre için Kirchhoff ' un çevrimA
kuralını uygularsak,
L
Y
E
di
di
L
iR L
i i R Li
.
dt
dt
R
D
bulunur. i terimi, bataryanın birim zamanda devreye
sağladığı enerjiye karşılık gelir.
e
v
i R terimi, birim zamanda direnç üzerinde
ğ çıkan ısı enerjisini
j
temsil eder. Son
açığa
T
A
terim ise, enerjinin korunumu gereği,
birim zamanda indüktörde depolanan manyetik
L
O
enerjiye karşılık gelir. Bu durumda
P indüktörde depolanan enerji,
A
dU
di
Li dU AFLidi
dt
dt
T
S
1
1
U
U LiM
di L i U Li indüktörde depolanan manyetik enerji
2
2
.
R
D ile verilir.
ifadesi
2
2
B
B
i
B
o
2 i
o
B
2
(30–28)
Manyetik Alanda Enerji Yoğunluğu:
M
I
R
Yanda, birim uzunluğunda n sarım bulunan, kesiti A ve
I
D
L
YI
boyu l olan bir solenoid verilmiştir. Solenoidten i akımı
geçtiğinde, içinde oluşan manyetik alan B 0 ni ile
A
L
Y
LE
verilmektedir. Solenoidin dışındaki manyetik alan ise
yaklaşık sıfırdır.
.
R
1 2 1
S l id depolanan
Solenoidte
d l
toplam
l enerji,
ji U B Li 0 n 2 Al i 2
2
2
olduğundan, solenoidin içindeki bölgede birim hacimdeki enerji miktarı, diğer
bir deyişle enerji yoğunluğu,
A
F
A
L
O
P
D
e
v
T
0 n 2 Ali 2 0 n 2i 2 0 2 n 2i 2
UB
B2
uB
uB
hacim
2 0
2 0
2 Al
2
S
U
A
T
M
.
R
olarak bulunur. Solenoid özel durumu için hesaplanmasına rağmen, genel bir
D
bağıntıdır ve manyetik alanın olduğu her durumda doğrudur.
(30–29)
Karşılıklı İndüktans:
Şekildeki g
gibi, birbirlerinin oluşturdukları manyetik
y
alan çizgilerinden etkilenebilecek kadar yakın iki
indüktör olsun. Ş
Şekil-a' da verilen 1 nolu halkadan
M
I
R
I
D
L
geçen i akımı, 2 nolu halkanın bulunduğu
YI bölgede
A
L
B manyetik
y
alanını oluşturur.
ş
Bunun sonucu olarak,,
Y
E akı M i olur.
2 nolu halkadan geçen L
manyetik
.
R
D
i akımı zamanla değişirse, 2 nolu halkadan geçen
akı da değişir ve
e
v
d
di
T
M
A
dt
dt
L
O
ile verilen bir emk indüklenir. Benzer
bir yaklaşım kullanılarak, 2 nolu halkadan
P
A
geçen i akımının zamanla
değişmesi durumunda (şekil-b), 1 nolu halkadan
F
A
geçen akı MTi olmak üzere, 1 nolu halkada indüklenen emk,
S
d
di
MU
M
dt
dt
.
R
yazılabilir.
D
1
1
2
21 1
1
2
2
21
1
2
1
1
1
12 2
12
2
(30–30)
M 21 ve M12 her ikisi de,
de indüktörlerin birbirine göre konumuna ve
M
I
R
geometrilerine bağlı sabitlerdir ve biribirine eşittir (M12 M 21 I M ).
D
L
I
M , iki indüktör arasındaki "karşılıklı indüktans" olarakYbilinir.
A
L
SI sistemindeki birimi "henry
henry (H)
(H)" dir. Bu durumda
indükterlerde
Y
E
L
indüklenen emk ifadeleri aşağıdaki gibi verilir:
.
R
D
e
v
di
Mi M T
Adt
L
O
P
A
di
F
Mi A
M
T
dt
S
U
M
.
R
D
1
2
2
1
1
2
2
1
(30–31)
M
I
BÖLÜM-31
Ö Ü
R
I
Elektromanyetik Titreşimler ILD
Y
ve
A
L
Y
Alternatif Akım
LE
.
R
D
e
v
Bu bölüm kapsamında
p
aşağıdaki
ş ğ
konulara değinilecektir:
ğ
T
A
L
LC deverelerinde elektromanyetik
salınımlar
O
Kapasitörlü alternatif P
akım (AC) devreleri
A
RCL devrelerindeFrezonans
A
T Güçç
AC devrelerinde
S
U
M
.
R
D
(31-1)
LC Salınımları :
M
I
R
Şekilde bir C kapasitörü ve bir L indüktöründen oluşan
devre verilmiştir. Kapasitör başlangıçta doludur ve
I
D
L
yükü Q ' dur.
=t 0 anında S anahtarının kapatılmasıyla,
YI
A r ve kapasitör
devreden zamanla değişen bir i akımıLgeçe
Y
E
indüktör üzerinden boşalmaya L
başlar.
.
H h i bir
Herhangi
bi anda,
d kkapasitör
i ö üüzerindeki
i d ki yük
ükDqRve devreden
d
d geçen akım
k i ise,
i
e
devrenin toplam enerjisi, kapasitör ve v
indüktördeki enerjilerin toplamı olur:
T
A
q
Li
L
U U U
2C
2 PO
A
Devredeki iletim kablolarının
direnci ihmal edilirse, toplam enerji sabittir.
F
A
dq
T
i
S
dU
q dq
di
d q 1
U
dt
0M
Li 0
q0
L
dt
C
dt .
C dt
dt
di d q
R
D
dt dt
2
E
2
B
2
2
2
2
(31-2)
d 2q 1
d 2q 1
L 2 q0
(Eş-1)
q 0
2
dt
C
dt
LC
Bu ikinci dereceden, homojen bir diferansiyel denklemdir ve çözümü daha önce
M
I
R
I
yapılmıştır Sürtünmesiz bir yüzey üzerinde titreşim hareketi yapan birIkütle-yay
yapılmıştır.
kütle
LD yay
Y
sisteminin hareket denklemi ve çözümü aşağıdaki gibidir:
A
L
d x
Y
x 0 (Eş-2) x(t ) x cos(t )
E
L
dt
.
Eş 1 ve Eş-2
Eş-1
Eş 2 karşılaştırıldığında,
karşılaştırıldığında her iki denkl
denklemin
eminRde aynı formda olduğu kolayca
D
ebetimleyen ve Eş-1 ile verilen denklemin
görülebilir. Buradan hareketle, LC devresini
v
çözümünden,
ö ü ü d 1/ LC olmak
l k üzere,
ü ATkkapasitör
itö üüzerindeki
i d ki yük
ük ve ddevreden
d geçen
L
akım sırasıyla,
O
P dq
d
q(t ) Q cos t FA
ve i
Q sin t
dt
A
T
olarak bulunur
bulunur. S
U
Burada Q M
maksimum yük (t 0 anında kapasitördeki yük miktarı), salınımın faz
.
açısı R
frekansıdır
Dve enerji salınım frekansıdır.
2
2
2
m
(31-3)
Herhangi bir anda kapasitördeki ve indüktördeki
enerjiler sırasıyla:
q
Q
UE
cos 2 t
2C 2C
2
Li 2 L 2Q 2
Q
UB
sin 2 t
sin 2 t
2
2
2C
ile verilebilir. Böylece herhangi bir anda toplam enerji:
2
2
.
R
U UE UB
A
L
O
P
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
Q2
1 Q2
2
2
U
cos t sin t
2 C
2C
olur. Toplam enerji sabittir: "enerji korunur".
A
F
A
T
3T
1 Q2
T
t 0, , T , ,.... kapasitördeki enerji maksimumdur (
).
2
2
2 C
T 3T 5T
1 Q2
t , , ,,.... indüktördeki enerji
j maksimumdur (
)).
4 4 4
2 C
S
U
M
.
R
D
(31-4)
M
I
R
.
R
A
F
S
U
A
L
O
P
A
L
Y
LE
I
D
L
YI
D
e
v
T
A
T
M
.
R
D
(31-5)
Alternatif Akım :
M
I
R
emk' sı sabit olan bir batarya, belli bir doğrultuda
sabit bir akım üretir. Bu tür akımlara "doğru akım"
I
D
L
veya "Direct Current - DC" adı verilir.
YI
A
L
Y düzgün bir manyetik
Sarım sayısı N ve yüzey alanı A olan bir halka, şekildekiEgibi
L
.
alan içinde iken ekseni etrafında açısal hızıyla döndürülsün. Halkadan geçen akı
R
D
ve indükleme yoluyla halkada oluşan emk sırasıyla,
e
v
d T
NAB cos t A NAB sin
i t sin
i t
L
dt
O
P yapılmıştır. emk'
olur. Burada, NAB kısaltması
emk sı dolayısıyla da ürettiği
A
F
A
akımın doğrultusu T
f
ile verilen bir frekansla periyodik olarak değişiyorsa,
2
S
bu tür gerilimU
kaynaklarına "alternatif akım" veya "Alternating Current - AC"
M
.
Şehir şşebekesinde kullanılan g
Ş
gerilimin maksimum değeri
ğ 310 V,,
adı verilir.
R
D
B
B
m
m
m
frekansı ise f 50 Hz' tir.
(31-6)
AC devresinde direnç:
M
I
R
Şekil-a' da bir AC üretecine bağlı R direnci verilmiştir.
I
D
L
I
Kirchhoff' un çevrim kuralı uygulanırsa:Y
(L
t )A
(t ) i(t )R 0i(t ) Y
E R
L
.
i(t ) sin t R
i sin t
D
R
e
v
bulunur. Maksimum akım i / R ifadesine sahiptir.
T
Auçları arasındaki gerilim de V (t ) sin t
Direncin
L
O
ile
verilir.
Şekil-b' de, direnç üzerinden geçen akım ve
P
Üreteç gerilimi (t ) m sin t şeklinde değişmektedir.
m
m
m
m
m
A
F direncin uçları arasındaki gerilim zamanın fonksiyonu
S
U
D
M
.
R
A
T
olarak çizilmiştir. Her iki nicelik de aynı zamanlarda
maksimum ve minimum değerlere sahip olduklarından
"aynı
y fazda" dır denir.
(31-7)
AC devrelerinde akım ve ggerilim,, şşekil-c' deki ggibi
M
I
"fazör diyagramı" ile gösterilir. Direnç üzerindeki
R
I
D
V (t ) gerilimi ve direnç üzerinden geçen
i
(t ) akımı,
akımı
L
I
Y
ismine "fazör" denilen dönen vektörlerle
gösterilir.
A
L
Y
E
L
.
Fazör diyagramının çizilmesinde aşağıdaki noktalara
dikkat edilmelidir:
R
D
e
v
1.. Fazörler,
a ö e , saat ibrelerinin
bee
te
tersi
s T
yö
yönünde
ü de açısal
aç sa hızı ilee dö
dönerler.
e e.
A
L
2. Her fazörün uzunluğu, kendi
genliği ile orantılıdır.
O
P
3 Fazörün düşey eksen
3.
üzerindeki
bileşeni
bileşeni, o niceliğin anlık değerine
A
F
A
eşittir.
T
S
4. Her fazörün
dönme açısı, o niceliğin fazına eşittir
U
M
.
((Yukarıdaki
örnek için
ç faz t' dir).
)
R
D
(31-8)
Direnç için ortalama güç :
M
I
R
T
I
0 P (t ) dtILD
Y
A
T
2
2
L
m 1
m
T
2
Y
sin
tdt
P
sin tdt P
E
2
L
R T 0
2 R.
R
AC gerilimin "kare ortalamasının D
karekökü" (kok değeri):
e
v
1/
2
1/ 2
T
2 T
T
1
m
m
2
A
2
Vkok V (t ) dt L
sin tdt
O
T
2
0
P T 0
A
2
F
V
A
ile verilir. BuTdurumda,
P kok bulunur. Bu ifade DC
S
R
U
M ve direnç üzerinde ısıya dönüşür.
ile aynıdır
.
R
D
m 2
1
2
P (t ) i (t )V (t )
sin t P
R
T
T
2
0
(31-9)
Örnek : Bir üretecin çıkışındaki gerilim (t ) = 200sin t ifadesine sahiptir.
B d t saniye
Burada,
i ve volt
lt cinsindendir.
i i d di Bu
B üreteç
ü t 100 ' luk
l k bir
bi di
direncin
i iki
ucuna bağlanırsa, direnç üzerinden geçen akımın "kok" değeri nedir?
(t ) 200
i (t )
sin t 2 sin t im 2 A
R
100
i
2
ikok m
1.41 V
2
2
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
Örnek : Bir üretecin çıkışındaki gerilim (te
) =D
msin t ifadesine sahiptir.
v
T
Bu üreteç, bir anahtar vasıtasıyla,
y 70 ' luk bir direncin iki ucuna bağlanmıştır.
ğ
Anahtar kapatıldıktan sonra t = 0.01 s anında direncin uçları arasındaki gerilim
A
L
O
V =0.25 ise, üretecin açısalPfrekansı nedir? Direncin uçları arasındaki gerilim
A
ne kadar zaman sonra aynı
değere sahip olur?
F
A
T
(t )
S
i (t )
V sin
i t 0.25
0 25 sin
i t t 0.25
0 25 radd
U
R
M
.
0.25
2
2
R 25 rad/s ;
T
0.25
0 25 s
T
25
D 0.01
R
m
R
m
m
m
(31-10)
AC devresinde kapasitör :
M
I
R
Şekil-a' da, AC üretecine bağlı C sığasına sahip bir kapasitör
I
D
L
YI
verilmiştir. Üreteç gerilimi (t ) m sin t ifadesi ile verilsin.
Kirchhoff' un çevrim kuralı uygulanırsa:
q(t )
(t )
0 q(t ) C (t ) Cm sin t
C
dq
Cm cos t i(t ) im sin t 90
i(t )
dt
m
bulunur. Maksimum akım im Cm
ifadesine sahiptir.
1/ C
Burada, X C 1/ C niceliği "sığasal direnç (kapasitif reaktans)"
.
R
A
L
Y
LE
D
e
v
T
S
U
D
M
.
R
A
L
O
P ve birimi ohm () dur.
olarak tanımlanır
A
Üreteç
frekansı çok yüksek ( ) ise kapasitörün kısa devre,
F
A
T ççok düşük
ş ise ( 0)) açık
ç devre olduğunu
ğ
ggösterir. Ş
Şekil-b' de
kapasitör akımı ve kapasitör gerilimi zamanın fonksiyonu olarak
ççizilmişti
ş r. Görüldüğü
ğ ggibi,, akım g
gerilimin 90o önündedir.
(31-11)
Kapasitör için ortalama güç :
2
m
P i (t )V (t )
sin t cos t
XC
2sin cos sin 2
A
m 2
L
P
sin 2t Y
2XC
LE
M
I
R
I
D
L
YI
.
T
T
m 2 1DR
1
P P(t )dt P
sin 2tdt 0
e
v
T 0
2
X
T
C
0
T
A
L
O
P herhangi bir güç kaybına yol açmaz.z
Not : Kapasitör ortalamada
A
F
A
titreşimin
belli bir zaman diliminde AC üretecinden enerji
T
S
U
soğurur,
kalan zaman diliminde ise bu enerjiyi kaynağa
M
.
R
verir Böylece,
Böylece ortalama olarak güç kullanmaz.
kullanmaz
D yeniden verir.
(31-12)
Örnek : Sığası 8 F olan bir kapasitör, kok değeri 150 V ve 60 Hz frekansında
çalışan bir üretecin kutuplarına bağlanmıştır.
bağlanmıştır Devrenin kapasitif reaktansını ve
M
I
R
devreden geçen akımın kok değerini bulunuz.
1
1
1
XC
332
6
C 2 fC 2 60 8 10
ikok
kok 150
0.452 A
X C 332
.
R
A
L
Y
LE
I
D
L
YI
D
e
v
Örnek : Bir AC üretecinin maksimum
ççıkışş gerilimi
g
= 48 V ve frekansı da
T
A F olan kapasitörün plakalarına bağlanırsa,
L
f = 90 Hz' tir. Bu üreteç, sığası 3.7
O
P değeri ne olur?
devreden geçen akımın maksimum
A
F
A
q (t ) C (t ) C sin t i (t ) C sin t i C
T
S
i 2 fC U 2 90 3.7 10 48 0.1 A
M
.
R
D
m
m
m
m
m
m
m
6
(31-13)
AC devresinde İndüktör (bobin):
M
I
R
Şekil-a' da, AC üretecine bağlı indüktansı L olan bir indüktör
I
D
L
YI
verilmiştir. Üreteç gerilimi (t ) m sin t ifadesine sahiptir.
Kirchhoff' un çevrim kuralı uygulanırsa:
A
L
Y
LE
di
di (t ) m
((t ) L 0
sin t
dt
dt
L
L
m
m
i(t ) sin tdt
cos t i(t ) im sin t 90
L
L
bulunur. Maksimum akım im m / L ifadesine sahiptir. Burada,
.
R
D
e
v
T
A
L
ve birimi O
ohm () dur.
P
ÜreA
teç frekansı
f k
çokk yüksek
k k ( ) ise
i indüktörün
i d k
açıkk ddevre,
F
A
T çok düşük ise ( 0) kısa devre olduğunu gösterir. Şekil-b' de
X L L niceliği
i liği "b
"bobin
bi direncii indüktif
i dük if reakta
k ns" olarak
l k bilinir
bili i
S
U
R
D
.M
indüktör akımı ve indüktör gerilimi zamanın fonksiyonu olarak
çizilmiştir. Şekilden de görüldüğü gibi, akım gerilimden 90o
geridedir.
(31-14)
İndüktör için ortalama güç :
M
I
R
I
D
L
YI
m 2
P i(t )V (t )
sin t cos t
XL
A
L
m
2sin cos sin 2 P
sin 2tEY
2X L . L
R
T
2 D T
me 1
1
P P(t )dt P v
sin 2tdt 0
T
T0
2
X
T
L
0
A
L
O
Not : İndüktör ortalamada
P herhangi bir güç kaybına yol açmaz.
A
titreşimin belli
bir zaman diliminde AC üretecinden enerji
F
A
Tkalan zaman diliminde ise bu enerjiyi kaynağa
soğurur
soğurur,
S
U
M verir. Böylece, ortalama olarak güç kullanmaz.
yeniden
.
R
D
2
(31-15)
Örnek : İndüktansı 25 mH olan bir indüktör, kok değeri 150 V ve 60 Hz
M
I
R
f k
frekansında
d çalışan
l
bir
bi üretecin
ü t i kutuplarına
k t l
b ğl
bağlanmıştır.
t D
Devrenin
i indüktif
i düktif
reaktansını ve devreden geçen akımın kok değerini bulunuz.
X L L 2 fL 2 60 25 10 3 9.425
ikok
kok
150
15.9 A
X L 9.425
.
R
A
L
Y
LE
I
D
L
YI
Ö k : Bir RL devresinde AC üretecinin çalışma
Örnek
D frekansı 50 Hz ve ürettiği
e
v
gerilimin maksimum değeri 100 V' tur. Devreden geçen akımın maksimum
T
A bulunuz.
değeri 7.5 A ise, indüktörün indüktansını
L
O
P
100
i
L
0.0424 42.4 mH
A
2 F
fi
2 50 7.5
L
A
T
S
Hangii açısallU
frekansta
f k
maksimum
ki
akım
k 2.5 A olur?
l
M 100
.
R
943.4
943 4 rad/s
Di L 2.5 0.0424
m
m
m
m
m
m
(31-16)
ÖZET
Devre
D
Elemanı
Ortalama
O
t l
Güç
Direnç
R
m
PR
2R
2R
Kapasitör
2
C
PC 0
Indüktör
L
PL 0
I
D
L
R kt
Reaktans
Ak
Akımın
Fazı
F
M k Ii
Maksimum
Y
(Direnç)
Gerilim
A
L
Y
E
Akım gerilimle
L
.
V i R
R
aynı
y fazda
d
R
D
e
v
i
1 TAkım gerilimden
V i X
X A
90 önde
C
C
L
O
P
Akım gerilimden
A
F X
S
U
A
T
M
I
R
R ,m
o
C
L
L
90o geride
C ,m
m
m
C
m
VL ,m im X L im L
M
.
R
D
(31-17)
Seri bağlı RLC Devresi :
IM
Şekil-a' da seri bağlı bir RLC devresi verilmiştir. AC
R
I
D
kaynağının emk'
emk sı t sin t ifadesine
uygun
L
I
Y
olarak değişmekte ve devreye sağladığı
akım da
A
L
Y
i (t ) i sin
i t şeklinde
kli d ddeğişmektedir.
ği
k di Ü
Üreteç
E
L
.
geriliminin ve devreye sağladığı akımının fazörleri
R
D
şekil-b' de verilmiştir.
Devreden geçen i (t ) akımı
e
v
ddirenç,
e ç, kapasitör
apas tö
ve indüktör
dü tö için
ç ortaktır.
o ta t . Şe
Şekil-c' de
T
A
L
direnç, O
kapasitör ve indüktörün uçları arasındaki
P fazörleri birarada verilmiştir
geri
gerilimlerin
limlerin
verilmiştir. Direnç
A
Füzerindeki gerilim akımla aynı fazda, kapasitör
A
T
m
m
S
U
D
M
.
R
üzerindeki gerilim akımdan 90 geride ve indüktör
üzerindeki gerilim akımdan 90 öndedir.
(31-18)
M
I
R
I
D
L
YI
A
L
Y
EV ve V zıt yönde
bulunur. Bu eşitlik yukarıda fazör formunda da verilmiştir.
L
.
olduğundan bileşkesi V V olur. Böylece, OABRdik üçgeninden:
D
V V V i R i X v
ie
X i R X X
T
A
veya i L
i
O
R X X
P R L 1C
A
F
A
bulunur. Paydadaki terim, RLC devresinin "empedansı" dır ve Z ile gösterilir:
T
S
1
U
Z R M
X
X
Z
R
L
veya
C
.
R
birimi
D 'dur.
RLC devresine Kirchhoff
Kirchhoff' un çevrim kuralı uygulanırsa: (t ) VR (t ) VC (t ) VL (t )
L ,m
L ,m
2
m
m
2
R ,m
C ,m
m
2
2
C ,m
2
L ,m
2
L
2
m
2
m
L
C
m
C
2
m
2
2
L
C
m
m
2
2
C
2
L
C ,m
2
2
(31-19)
OAB dik üçgeninden: tan
VL ,m VC ,m
VR ,m
im X L im X C X L X C
im R
R
M
I
R
I
D
Ldüktifti
0 Akımın
Ak
f gerilimin
fazı
ili i fazından
f
d geridedir,
id di devre
d
iIindüktiftir.
Y
0 Akımın fazı gerilimin fazının önündedir, devre
kapasitiftir.
A
L
0 Akım
Ak ve gerilim
ili aynı ffazdadır.
d d
Y
E
L
.
R
D
e
v
T
A
L
O
P
A
F
A
T
S
U
bulunur. Devrenin fazı, X L ve X C ' nin alacağı değerlere bağlıdır:
1 X L XC
1.
2. X C X L
3 XC X L
3.
M
.
R
D
(31-20)
Örnek : Bir RLC devresinde AC üretecinin çalışma frekansı 60 Hz ve ürettiği
M
I
R
gerilimin maksimum değeri 120 V' tur. Devrede R = 200 , C = 4 F ve L
değişkendir. L' nin hangi değerinde, kapasitörün uçları arasındaki gerilim üretecin
geriliminden 30o geride kalır?
Kapasitörün uçları arasındaki gerilimin üretecin
geriliminden 30 o geride kalması demek, devredeki
.
R
A
L
Y
LE
I
D
L
YI
akım ile gerilim arasındaki faz farkının 60
olması demektir.
XL XC
tan
X L X C R tan
R
1
1 1
2 fL
R tan L
R tan
2 fC
2 f 2 fC
o
A
F
S
U
A
L
O
P
D
e
v
T
A
T
1
1
L
200 tan 60 0.84 H
6
2 60 2 60 4 10
M
.
R
D
(31-21)
Örnek : Maksimum gerilimi 150 V olan ve çalışma
ffrekansı
k
50 Hz olan
l bir
bi AC üretecii şekildeki
kild ki RLC
devresinin a ve d uçlarına bağlanmıştır. a-b; b-c; c-d
ve b-d uçları arasındaki maksimum gerilimleri bulunuz.
X L L 2 fL 2 50 00.185
185 58
.
R
1
1
1
XC
49
6
C 2 fC 2 50 65 10
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
150
i
3.66
3 66 A
T
R X X
58 49
40 LA
O
V i R 3.66 40 P
146.4 V
A
V i X 3.66A
F 58 212.3 V
T
V i X S
3
3.66
179 3 V
66 49 179.3
U
M
.
R
D
m
m
2
2
L
R ,m
m
L ,m
m
L
C ,m
m
L
2
2
C
(31-22)
Örnek : Bir RLC devresinde; R 150 , L = 250 mH, C = 2 F,
M
I
üretecin maksimum gerilimi 210 V ve çalışma frekansı 50 Hz'IR
tir.
LD
İndüktif ve kapasitif reaktansları,
reaktansları devrenin empedansını,
empedansını Idevredeki
Y
maksimum akımı ve akımla gerilim arasındaki faz L
açısını
A bulunuz.
Y
E
X L 2 fL 2 50 0.25 78.5
L
.
R
1
1
1
D
X
1592.4
e
C 2 fC 2 50 2 10 v
T
Z R X X 150L
A 78.5 1592.4 1521.3
O
P210
A
i
0.138 A 138 mA
F 1521.3
R X XA
T
S
XU X
78.5 1592.4
tan M
84.4
tan
R
150
.
R
D
L
C
6
2
2
m
L
2
2
C
m
2
2
1
L
L
C
C
1
o
(31-23)
ÖDEV : Bir RLC devresinde; R 425 , L = 1.25 H, C = 3.5 F,
M
I
üretecin maksimum gerilimi 150 V ve açısal frekansı 377 rad/s'Rdir.
I
D
İndüktif ve kapasitif reaktansları,
reaktansları devrenin empedansını,
empedansını devredeki
L
I
Y
maksimum akımı ve akımla gerilim arasındaki faz açısını
bulunuz.
A
L
Y
E
L
.
R
D
e
v
T
A
L
O
P
A
F
A
T
S
U
M
.
R
D
(31-24)
Rezonans :
Ş kild verilen
Şekilde
il RLC devresindeki
d
i d ki üretecin
ü t i açısall frekansı
f k
M
I
R
I
D
L
olarak
l k artırılsın.
t l
D
Devreden
d geçen akımın
k
genliği,
liği
I
Y
A
i
L
Y
R X X
1
E
R
L
L
C
.
R
D
1
eşitliği ile verildiğinden,
e L C 0 olduğunda akımın
v
T
genliği enA
büyük olur. Bu durum üretecin açısal frekansı ,
L
O
P1
devrenin doğal frekansıFA
değerine eşit olduğunda gerçekleşir. Buna
A
LC
T
S
"rezonans" ddurumu
ddenir.
i R
Rezonans ddurumunda,
d akımın
k
genliği
liği i / R olur.
l
U
M karşı çizilen akım genliği "rezonans eğrisi" olarak bilinir.
Üreteç frekansına
.
R
D
olsun ve çok düşük bir değerden yukarı doğru sürekli
m
m
2
m
2
L
C
2
2
0
rez
m
(31-25)
RLC Devresinde Güç :
M
I
R
AC devrelerinde kapasitör ve indüktör tarafından
I
D
L
I
gördük. Ortalama güç direnç üzerinde
ve
Yharcanır
A
L
şöyle hesaplanır:
Y
E
L
P(t ) i(t ) R i sin.t R
R
iDR
i R
1
e
P Pdt
sin
t
dt
i R
v
T T
T
2
A
R
L
PO i Ri i R
i
i cos
P
Z
Z
kullanılan ortalama gücün sıfır olduğunu daha önce
2
2
m
T
2
m
ort
0
T
2
2
m
2
kok
0
kok
ort
kok
kok
kok
kok kok
kok kok
A
F Bu ifadedeki cos , devrenin "güç faktörü" olarak
S
U
R
D
.M
A
T
bilinir. 0 durumu (X L X C ) rezonans şşartıdır ve
bu durumda, devrede harcanan güç maksimumdur.
T
sin t dt
0
2
T
2
(31-26)
Örnek : Bir RLC devresinde; R 8 , L = 50 mH, C = 5 F ve frekansı
değiştirilebilen AC kaynağının maksimum gerilimi 400 V' tur. Kaynağın
frekansı rezonans frekansının yarısına eşit olduğunda, devreye sağlanan
ortalama güç ne kadardır?
Port ikok kok cos
1
LC
0
1
50 10 5 10
3
6
2000 rad/s
A
L
O
P
.
R
A
L
Y
LE
M
I
R
I
D
L
YI
D
e
v
T
X L L 50
2
2
0 1000 rad/s
Z
R
X
X
150.2
1
L
C
2
XC
200
C
400
R
8
im m
cos
2.66 A ;
Z 150.2
Z 150.2
0.2 (400) 8 28.3 W
i
Port ikok kok cos m m cos
2
2
2
150.2
A
F
S
U
A
T
M
.
R
D
(31-27)
Örnek : Bir RLC devresinde; R 150 , L = 20 mH, üretecin kok değeri
M
I
R
30 V ve ffrekansı
k
5000 rad/s'
d/ ' dir.
di Devredeki
D
d ki akımın
k
maksimum
ki
olabilmesi
l bil
i
için, bağlanması gereken kapasitörün sığası ne olmalıdır? Devredeki akımın
kok değerini hesaplayınız.
I
D
L
YI
A
L
D
Devredeki
d ki akım
k rezonans durumunda
d
d maksimum
k i
olur.
l Y
E
L
1
1
.
X X
L
R
C
LC D
e 1
1
v
5000
C T
2 10
5000 20 10
A
20 10 C
L
O
30
P(Rezonans ddurumunda
0.2
i
0 2 AA (R
d Z R di
dir.))
Z
150
F
A
T
S
U
M
.
R
D
L
C
0
0
0
3
kok
2
3
6
2 F
kok
(31-28)
Örnek : Bir RLC devresinde; R 400 , L = 0.5 mH, C = 5 F ve AC
üretecin gerilimi (t ) 100sin 1000t ile veriliyor. Burada t saniye ve
I
D
L
YI
volt cinsindendir. Kaynağın devreye sağladığı ortalama gücü bulunuz.
Port ikok kok cos
A
L
Y
E
L
Z. R X X
R
D
X L L 0.5
2
1000 rad/s
1
L
200
XC
C
100
R 400
im m
cos
0.22 A ;
Z
447
Z 447
0.22 (100) 400
im m
cos
Port ikok kok cos
10 W
2
2
2
447
A
F
S
U
M
I
R
A
L
O
P
e
v
T
C
2
447
A
T
M
.
R
D
(31-29)
Piletim 368 MW
I
D
L
YI
Pısı 55 MW
Enerji İletim Hattı :
.
R
A
L
Y
LE
M
I
R
l
Gü il
Güç
iletim
ti hhattının
tt
di
direnci:
i R (tasarruf
(t
f için,
i i küçük
kü ük kkesit
it alanına
l
sahip
hi ince
i
teller,
t ll
A
yukarıdaki örnekte R 220 olarak seçilmiştir).
D
e
v
T
A
L
iPO
(maksimum güç iletmek için,
2
İletim hattında açığa çıkan güç: Pısı ikok
R (kaybın en az olması için, akım düşük olmalı).
İletilmek istenen güç: Piletim kok kok
A
F
kok
artırılmalı).
A
T
Yukarıdaki örnekte, iletim hattından geçen akım en fazla ikok 500 A' dir. Dolayısıyla,
S
U
iletim hattının girişinde, kok 736 kV olmalıdır. Şehir şebekesi gerilimi yaygın olarak
M
.
R
220 V olduğundan, iletim hattının sonunda kok değeri düşürülmelidir. Bunun için de,
D
AC geriliminin genliğini artıracak veya azaltacak cihazlara ihtiyaç duyulur.
(31-30)
Örnek : Bir enerji istasyonu, 1 km uzaktaki bir kasabaya 20 MW' lık güç sağlamak
istiyor İstasyon çıkışında 22 kV olan güç bir transformatör yardımı ile 230 kV'
istiyor.
kV a
M
I
çıkarılıyor. İletim hattının toplam direnci 2 ve elektriğin kilowatt- saat' i 0.2 ITL
R
D
ise bir günlük enerji maliyetini hesaplayınız
ise,
hesaplayınız. Transformatör kullanılmadığı
durum
L
I
Y
için aynı hesabı tekrar yapınız.
A
L
P
20 10
Y
P I V I
87 A
E
V 230 10
L
.
İletim hattında harcanan (ısıya dönüşen) güç: P R
I R 87 2 15 kW
D
e 360 kW-saat
Bir günlük toplam kayıp 15 kW 24vsaat
M li
Maliyet
360 kW-saat
kW
0 2 TL A
T
72 TL
0.
L
O
İstasyon çıkışında transformatör
kullanılmasaydı:
P
P A
20 10
910 A
P I V I
F
A
V 22 10
T
S
İ
İletim
hattında
harcanan (ısıya dönüşen) güç: P I R 910 2 1656 kW
U
Mtoplam kayıp 1656 kW 24 saat =39744 kW-saat
Bir günlük
.
R
Maliyet
D 39744 kW-saat 0.2 TL 7950 TL
6
3
ısı
2
2
6
3
ısı
2
2
(31-31)
Transformatör :
M
I
R
AC gerilimlerin genliklerini değiştirmeye yarayan
I
D
cihaz ya da aletlere "transformatör"Ladı
verilir.
verilir
I
Y
Şekildeki gibi, aynı demir çekirdek üzerinde farklı
A
L
sarım sayılarına sahip ikiY
halkadan oluşur.
oluşur
E
L
.
Değiştirilecek gerilime bağlı,
bağlı sarım sayısı N olan R
halkaya "primer" adı verilir
verilir.
D
e N olan halkaya ise "sekonder"
Transformatör çıkışının bağlı olduğu, sarımvsayısı
T
adı verilir.
verilir
A
L
O
P
D i çekirdeğin
Demir
ki d ği rolü,
lü bir
bi A
halkanın
h lk
manyetik
tik alan
l çizgilerinin
i il i i diğer
diğ hhalkadan
lk d dda
F
A
geçmesini sağlamaktır. Primer halkanın girişine V gerilimi uyguladığımızı, sekonder
T
S
halkanın çıkışından
V gerilimi aldığımızı varsayalım. Halkaların kesit alanı A ve
U
M manyetik alan da B olsun. Primer ve sekonder halkalardan geçen
her iki halkadaki
.
R
D akılar ile bunların uçları arasındaki gerilimler:
manyetik
P
S
P
S
(31-32)
d P
dB
NP A
dt
dt
d S
dB
S NS BA VS
NS A
dt
dt
bulunur. Bu iki eşitliği taraf tarafa oranlarsak:
P N P BA
VP
(Eş-1)
(Eş
1)
(Eş-2)
M
I
R
I
D
L
YI
A
L
dB
Y
N A
V
V
N E
V
dt N
V V
L
.
dB
V
N
N
N
N
N A
R
dt
D
e sayılarına bağlı olarak transformatörler
sonucuna ulaşılır. Halkaların birbirlerine görev
sarım
T
f kl şekilde
farklı
kild iisimlendirilirler:
i l di ili l
A
L
N
N N
V , bu "yükseltici transformatör" adını alır.
1 VPO
N
A
N AF
N N
1 V V , bu "düşürücü transformatör" adını alır.
T
N
S
U
Uzak noktalara
enerji iletiminde her iki transformatör türü de kullanılmaktadır.
M
.
R
D
S
S
P
P
S
P
S
S
S
P
P
S
P
S
P
S
P
S
P
S
P
P
S
P
S
P
(31-33)
VS
VP
NS NP
VP N S =VS N P
((Eş-1)
ş )
M
I
R
I
D
L
h lk d ki I akımı
halkadaki
k
yanındaki
d ki sekonder
k d Ihhalkada
lk d dda bi
bir
Y
I akımı oluşur. TransformatörünA
"ideal" olduğunu
L
Y
yani ısınma nedeniyle enerjinin kaybolmadığını varsayarsak:
E
L
.
(Eş. 2)
V I V I
R
D
yazılabilir. Eş-2 ve Eş-1' i taraf tarafa bölersek,
e
v
V I
V I
N
T
I N IA
N I
I
V N
V N
N
L
O
bulunur.
P
A
Yükseltici transformatörlerde
(N N ), sekonder halkada oluşan akım primer
F
A
Tküçüktür
halkadaki akımdan
ç
(I I )).
S
U
DüşürücüM
transformatörlerde
(N N ), sekonder halkada oluşan akım primer
.
halkadaki
akım
akımdan
dan büyüktür (I I ).
)
R
D
Yandaki devrede S anahtarı kapatıldığında, primer
P
S
P P
S S
P P
P
S
S S
S
P
P
S
S
S
P
P
P
S
S
S
P
P
S
S
P
P
(31-34)
Örnek : Bir transformatörün primer ve sekonder halkalarındaki sarım sayıları N P 350 ve
N S 2000 ' di
dir. P
Primer
i
hhalkanın
lk
girişine
i i i VP = 175
175cos t ifadesi
if d i il
ile ddeğişen
ği
bi
bir gerilim
ili
uygulanırsa, sekonder halkanın çıkışındaki gerilimin kok değeri ne olur?
VS
V
P
NS NP
NS
2000
VP
175 cos t
NP
350
1000
VS kok
707.1 V
2
VS
VS 1000 cos t
A
L
Y
LE
M
I
R
I
D
L
YI
.
R
Örnek : Bir transformatörün sekonder halkasına bağlı direnç
R = 50 ve uçları arasındaki
D
gerilimin kok değeri V = 25 V' tur. Üreteç geriliminin
e kok değeri V = 80 V ve primer ile
v
sekonder halkaların sarım sayıları
sayıları oranı da NT/ N = 2.5
2 5 ise,
ise primer halkadaki direnç (R ) nedir?
A
L
V
V
N
O
V
(25) 62.5 V
V 2.5
P
N
N
N
A
F
A
Üreteçç gerilimi
g
80 VTolduğuna
ğ
göre,
g , ppotansiyel
y düşmesi
ş
(V ) 17.5 V olur.
S
U
25
V
V V
M
I
0.2 A
V I V I
I
.
V
V R 62.5 50
R
D V 17.5
S
'
p
S
P
S
P
S
P
P
P
S
P
S
S
D
2
P P
S S
P
S
P
RP
D
IP
0.2
87.5
S
S
S
P
S
(31-35)
RLC devrelerinde sönümlü titreşim :
M
I
R
Şekildeki gibi, LC devresine bir direnç eklenirse, direnç
I
D
L
YI
üzerinde kayıp olacağı için enerji denklemini yeniden
yazmak
k gerekir.
ki Direnç
Di
üzerinde
ü i d birim
bi i zamanda
d ısıya
dU
dönüşen enerji miktarının
i 2 R olduğunu biliyoruz.
dt
A
L
Y
E
L
Herhangi bir anda kapasitördeki yük q, devreden geçen akım
i ise,
.
R
1q 1
dU q ddq
di
U U U
Li
LiD i R
2C 2
dt C dt e dt
v
dq
di d q
d q
dq T1
i
ve
L
R A q 0
dt
dt dt
dt
dt C
L
O denklemi ile aynı formdadır.
Bu denklem sönümlü harmonik P
hareket
A
d x
dx
F x(t ) x e cos t ; k b
b kx 0A
m
dt
dt
m 4m
T
S
Bu benzerlikten dolayı,
RLC devre denkleminin çözümü şöyedir:
U
M
R
1
.
q (t ) R
Q
Qe
cos t ;
LC 4 L
D
2
E
B
2
2
2
2
2
2
2
m
2
Rt / 2 L
2
bt /2 m
2
2
2
(31-36)
q (t )
Q
Q
Qe Rt / 2 L
Q
q(t ) Qe Rt / 2 L cos t
M
I
R
q (t )
Qe Rt / 2 L
.
R
A
L
Y
E
L
I
D
L
YI
1
R2
2
LC 4 L
D
e ile değişen bir harmonik hareketi
ifadesi
v
T
Rt /2 L
Bu eşitlik, maksimum genliği Qe
tanımlamaktadır Genlikte zamanla bir azalma meydana geldiği için "sönümlü
tanımlamaktadır.
harmonik hareket" isimlendirmesi yapılmıştır. Sönümlü harmonik hareketin
açısal frekansı, sönümün olmadığı durumdakinden daima daha küçüktür.
A
F
A
L
O
P
A
1 S
1
RT
<
U
LC 4L
LC
M
R /4R
L . 1/ LC durumunda, bu iki frekans yaklaşık aynı alınabilir ( ).
D
2
2
2
2
(31-37)
DERS NOTLARININ
HAZIRLANMASINDA
YARARLANILAN KAYNAK KİTAPLAR
Fiziğin Temelleri (Ders Kitabı)
(David HALLIDAY, Robert RESNICK, Jearl WALKER)
Üniversite Fiziği (Yardımcı Kitap)
(Hugh D. YOUNG ve Roger A. FREEDMAN)
Fen ve Mühendislik İçin FİZİK (Yardımcı Kitap)
(Raymond A. SERWAY ve John W. JEWETT)