5. Uluslararası İleri Teknolojiler Sempozyumu (IATS’09), 13-15 Mayıs 2009, Karabük, Türkiye
ELEKTRİKSEL GERİLİM İŞARETİNİN FAZ PARAMETRELERİNİN
TAHMİNİ İÇİN KALMAN FİLTRESİ YAKLAŞIMININ BENZETİMİ
SIMULATION OF KALMAN FILTER APPROXIMATION FOR PREDICTING
OF PHASE PARAMETERS OF ELECTRICAL VOLTAGE SIGNAL
H.Hüseyin SAYANa, *, İlhan KOŞALAYb ve Mesut KAHRAMANc
a, *
Gazi Üniversitesi, Ankara, Türkiye, E-posta: [email protected]
TRT Gn. Md. Ankara, Türkiye, E-posta: [email protected]
c
BATEM MEB Giresun, Türkiye, E-posta: [email protected]
b
Özet
Bugüne kadar parametre tahminleri için çeşitli algoritmik
yaklaşımlar kullanılmıştır. Bunların arasında uyarlanabilir
klasik metotlar; çevre şartlarına göre kendi kendisini en
iyiye doğru kanalize edebilmesi, zamanla değişen
sistemlere kolaylıkla uygulanabilmesi ve yeni durumlara
göre kendi kendine ayarlayabilmesi yönüyle öne çıktığı
görülmektedir. Bu çalışmada, klasik uyarlanabilir
metotlardan Yinelenen En Küçük Kareler Metodu (YEKK)
kullanılmıştır. Öncelikle YEKK metoduna Kalman filtresi
algoritması adapte edilmiştir. Sinüs işaretinde yaratılan
basamak tarzındaki faz açısı kayması ve gerilim göçmesi,
izlenen sinyale kilitlenme seviyesini incelemek için,
MATLAB yardımıyla simule edilmiştir. Simülasyon
sonuçları irdelenmiş ve metodun etkinliği tartışılmıştır.
Anahtar kelimeler: Elektriksel işaret, Kalman filtresi,
MATLAB
Abstract
Hitherto various algorithmic approaches were used for
estimation of parameter. Adaptable classical methods
come forward amongst these approaches because of
optimizing itself in the varying environmental conditions,
being applicable to time-varying systems easily and being
adaptable by itself to new conditions. In this study,
recursive least squares method (RLSM) that is one of the
adaptable classical methods was used. Firstly Kalman filter
was adapted to RLSM. Step form of phase angle shift and
voltage collapse which were created in sinus signal were
simulated to investigate for locking level of tracked signal
by using MATLAB code. Results of simulation were
examined and efficiency of method was presented.
Keywords : Electrical signal, Kalman filter, MATLAB
1. Giriş
Günümüzde hızla gelişen yarı iletken teknolojisi sayesinde
her geçen gün daha iyi performansa sahip dijital sinyal
işlemcileri geliştirilmektedir. Böylece çeşitli hesap
yöntemleri kullanılarak geliştirilen algoritmalar sayesinde
sistemlerin ihtiyacı olan parametreler kolaylıkla elde
edilebilmektedir. Sistem parametrelerinin tahminine
dayanan hesaplama teknikleri günümüzde kendine
oldukça fazla kullanım alanı bulmaktadır. Bu parametre
© IATS’09, Karabük Üniversitesi, Karabük, Türkiye
tahmini ve hesaplamasında kullanılan yöntemlerden biri
ardışık tahmin yöntemleridir. Song, Nam ve Mutschler, bir
fazlı şebeke geriliminde olabilecek ani faz açısı kaymaları,
gerilim göçmeleri ve bölgesel frekans değişimleri durumları
için yaptıkları çalışmada faz bilgilerinin hesaplanması
üzerinde durmuşlardır [1]. Chung ise üç fazlı şebeke için
dq transformu kullanarak bir PLL tekniği geliştirmiştir. dq
transformundan elde ettiği algoritma ile faz bilgilerinin dijital
sinyal işlemciler kullanılarak elde edilebileceğini ve bu
bilgilerin kontrol sistemlerinde kullanılabileceğini yaptığı
simülasyon çalışması ile göstermiştir [2].
Torun (2005) tezinde, uyku elektroensefalografi’si(EEG)
verilerinin parametre tahminleri için ardışık tahmin
yöntemlerini karşılaştırmıştır. Yaptığı çalışmada parametre
tahmini için en iyi algoritma yaklaşımını bulmaya
çalışmıştır [3]. Buna benzer bir çalışmada Özer, Sağıroğlu
ve Kaplan (2004), geliştirdikleri sayısal tabu araştırma
algoritmasının performans analizi için yinelenen en küçük
kareler (YEKK), en küçük kafes kareler gibi uyarlanabilir
klasik metotların yanı sıra yapay sinir ağlarını
karşılaştırmıştır. Bu çalışma sonucunda uyarlanabilir klasik
metotların performansının diğerlerine göre daha iyi
olduğunu belirtmişlerdir.
Bu çalışmada klasik uyarlanabilir metotlardan yinelenen en
küçük kareler metodu kullanılmıştır. Öncelikle YEKK
metodunun kalman filtresi yaklaşımı için matematiksel
analiz yapılarak bir fazlı sinyalin faz bilgilerinin elde
edilmesine çalışılmıştır. Elde edilecek faz bilgileri ile
izlenen sinyale kilitlenme süreci üzerinde durularak
MATLAB’da bir ara yüz oluşturulmuştur.
Uyarlanabilir algoritmalar iki gruba ayrılır. Birinci grup, en
küçük ortalamalar karesi algoritmalarına dayalı olan
algoritmalardır. En küçük ortalamalar karesi algoritması, bir
azaltım arama algoritması ile sistem hatasının karesinin
ortalamasını minimize eder ve hesap karmaşıklığının az
olmasından dolayı çok popülerdir. Fakat en küçük
ortalamalar karesi algoritmalarının yakınsama oranı
sisteme ve giriş istatistiklerine bağlıdır. Sistem
parametrelerinin tahminindeki düşük yakınsama oranından
dolayı en küçük ortalamalar karesi algoritması her zaman
tatmin edici çözümler vermemektedir. İkinci grup, hatanın
karesinin deterministik toplamını en aza indiren YEKK
algoritmasına dayanır. YEKK algoritması, en küçük
ortalamalar karesi algoritmasından daha hızlı yakınsama
özelliği göstermesine rağmen hesaplama karmaşıklığı
fazladır [4].
Sayan, H. H., Koşalay, İ. ve Kahraman, M.
2. Kalman filtresi ile parametre tahmini
y(1) verildiğinde
Çıktısı {y(t)} olan bir sistemin
θˆ (t |(t-1)) olmak üzere Kalman filtresi,
y(t) = a1y(t-1)+a2y(t-2)+...+any(t-n)+ν(t)
(1)
doğrusal fark denklemleri ile modellendiği kabul edilsin.
Burada {y(t)} beyaz gürültü sürecini ve t=1,2,,..,n zaman
noktalarını göstermektedir. (1) eşitliğini q-1 gecikme işleyici
θ
(t)‘ nin en küçük varyanslı tahmini
θˆ (t |t-1) = θˆ (t-1|t-1)
[1]
θˆ (t |t) = θˆ (t|t-1) + K(t)[ y(t) - ϕ T(t) θˆ (t |t-1)]
T
K(t) = P(t |t-1) ϕ (t)[ ϕ (t) P(t |t-1) ϕ (t) + R2(t)]-1
P(t |t+1) = P(t) + R1(t)
T
P(t) = [1 –K(t) ϕ (t)]P(t |t-1)]
(10)
(11)
(12)
(13)
(14)
eşitlikleri elde edilir.
-1
q y(t) = y(t-1)
(2)
olmak üzere
A(q-1)y(t) = ν(t)
(3)
Sistem durum ve kovaryans tahminlerinin hesaplanması
için, durum ve ölçüm gürültülü kovaryans ve varyanslarının
bilinmesi gerekmektedir. Çoğu zaman bunların gerçek
değerleri bilinmediğinden ardışık tahminleri kullanılır.
Eşitlik (9)’de gürültülü kovaryans matrisinin, R1(t)=q·I
şeklinde olduğu varsayımı altında q parametresi,
biçiminde yazabiliriz. Burada;
e(t ) 2 − E [e(t ) 2 ]
T
ϕ (t )ϕ (t )
q = h
-1
-1
-n
A(q ) = 1+a1q +...+anq
(4)
ve n modelin mertebesi, a1,...,an modelin bilinmeyen
parametreleridir. (1) veya (2) modeli
(15)
ile hesaplanır. Burada,
E [e(t)2|q ≡ 0] = R2(t)+ ϕ T(t)P(t|t-1) ϕ (t)
(16)
θ T = (a1,..,an)
(5)
biçimindedir. α düzeltme parametresi ve ölçüm gürültü
varyansı R2(t)’nin ardışık tahmini,
ϕ T (t) = (-y(t-1),...,-y(t-n))
(6)
R2(t) =
α R2(t-1)+(1- α )h(e(t)2 - ϕ T(t)P(t|t-1) ϕ (t))
(17)
olmak üzere q’nun ardışık tahmini,
olmak üzere
q(t) =
y(t) =
θ T ϕ (t) + ν(t)
(7)
= α q(t-1)+
şeklinde yazılabilir.
Eşitlik (7) ile verilen modeldeki parametrelerin tahmin
edilmesinde kullanılan yöntemlerden birisi de Kalman
filtresidir. Bu amaçla parametre vektörü rasgele yürüyüş
süreci olarak kabul edilirse (7) eşitliği,
θ
θ (t) + w(t)
y(t)= ϕ (t) θ (t) + ν (t)
(t+1) =
T
e(t ) 2 − E [e(t ) 2 ]
T
ϕ (t )ϕ (t )
α q(t-1) + (1- α )h
(8)
(9)
durum uzay modeli biçiminde yazılabilir. Burada durum
vektörü parametre vektörüdür. {w(t)}, {ν (t)} beyaz gürültü
süreçlerini göstermektedir. Hata teriminin ve başlangıç
durumunun bazı varsayımlarını sağladığı kabul edilmiştir.
Sistem geçiş matrisi birim matristir. En iyi filtreleme
problemi, y(t), y(t-1),..., y(1) gözlemleri verildiğinde, θ (t)
durumunun en iyi tahminini belirleme problemidir. y(t-1),...,
e(t ) 2 − R2 (t ) − ϕ T (t ) P (t − 1)ϕ (t )
ϕ T (t )ϕ (t )
(1- α )h
(18)
dir.
(10)-(14) denklemlerinde R1(t) yerine;
R1(t) =
1
[I – K(t) ϕ T(t)]P(t)
λ
(
t
)
−
1
(19)
ve R2(t) yerine de;
R2(t) = λ (t)
(20)
alınırsa (10)-(14) denklemlerine geçiş sağlanmış olur [3].
Burada YEKK metoduna göre Kalman filtresi elde
edilmiştir. YEKK metodundan elde edilen Kalman Filtresi
Sayan, H. H., Koşalay, İ. ve Kahraman, M.
yaklaşımının kullanılabilir algoritması aşağıdaki gibidir. Bu
algoritmada unutma faktörü λ ’nın değeri 1’e eşittir [5].
θˆ (t) = θˆ
(t-1)+K(t) ε (t)
ε (t) = y(t) - ϕ T (t) θˆ
T
(21)
(t-1)
(22)
T
K(t) = P(t) ϕ (t) = P(t-1) ϕ (t)/[ 1+ ϕ (t)P(t-1) ) ϕ (t)] (23)
T
T
P(t)=P(t-1)–P(t-1) ϕ (t) ϕ (t)P(t-1)/[1+ ϕ (t)
P(t-1) ϕ (t)]+R1
(24)
Algoritmada yer alan R1 matrisinin norm eğerinin algoritma
tepkisine nasıl etki ettiği önemli bir konudur.
3. YEKK yönteminin Kalman filtresi yaklaşımı ile
gerçekleştirilmesi ve MATLAB ara yüzü
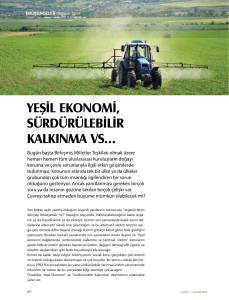
Şekil 2. Kalman filtresindeki R1=1·I norm değeri için tepki
eğrisi
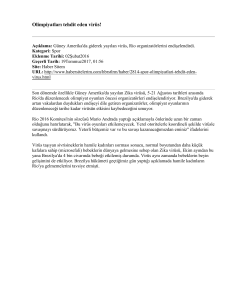
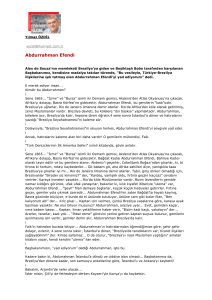
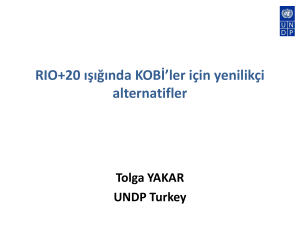
Simülasyonlarda kullanılan arayüz Şekil 1 de verilmiştir.
Şekil 2, 3 ve 4 de YEKK yönteminin Kalman filtresi
yaklaşımı ile gerçekleştirilmesinde R1 matrisinin 1·I , 0,01·I
ve 0,001·I norm değerleri için sinüssel sinyalde yaratılan
basamak tarzındaki faz açısı kayması ve gerilim
göçmesine tepkisi gösterilmiştir.
Şekil 3. Kalman filtresindeki R1=0,01·I norm değeri için
tepki eğrisi
Şekil 1. YEKK Metodunun Kalman filtresi yaklaşımı ile bir
fazlı sinyale kilitlenme simülasyonunun arayüzü
Şekil 4. Kalman filtresindeki R1 =0,001·I norm değeri için
tepki eğrisi
Sayan, H. H., Koşalay, İ. ve Kahraman, M.
Şekillerden anlaşılacağı üzere YEKK metodunun Kalman
filtresi yaklaşımında R1 matrisinin norm değeri unutma
faktörü yaklaşımındaki λ’nın değeri gibi algoritma
adaptasyonunda belirleyici bir faktördür. Şekiller
incelendiğinde R1 matrisinin büyük norm değerleri için
izlenen sinyale kilitlenme kısa sürede ve sert bir biçimde
olmaktadır. R1 matrisinin norm değeri sıfıra yaklaştıkça
kilitlenme zamanı artmakta ancak kilitlenme yumuşak bir
şekilde olmaktadır. Uygulama alanına göre kilitlenmenin
sert mi olacağına yoksa yumuşak bir şekilde mi olacağına
kullanıcı deneysel sonuçlarla karar vermelidir.
4. Sonuç
Çalışmada Yinelenen En Küçük Kareler Metodu (YEKK)
kullanılmıştır. Öncelikle YEKK metoduna Kalman filtresi
algoritması adapte edilmiştir. Sinüs işaretinde yaratılan
basamak tarzındaki faz açısı kayması ve gerilim göçmesi,
izlenen sinyale kilitlenme seviyesini incelemek için,
MATLAB yardımıyla simule edilmiştir. Simülasyon
sonuçları ; R1 matrisinin büyük norm değerleri için izlenen
sinyale kilitlenmenin kısa sürede ve sert bir biçimde
olduğunu, R1 matrisinin norm değeri sıfıra yaklaştıkça
kilitlenme zamanının arttığını ancak kilitlenmenin yumuşak
bir şekilde oluştuğunu göstermektedir.
Kaynaklar
[1] Song, H., Nam, K., Mutschler, P., “Very Fast Phase
Angel Estimation Algorithm For A Single Phase System
Having Sudden Phase Angel Jumps”, Conference
Record of 2002 IEEE Industry Aplications,
925931(2002)
[2] Chung, S. “A Phase Tracking System For Three Phase
Utility Interface Inverters”, IEEE Transactions On
Power Electronics, 15(3): 431-438 (2000)
[3] Torun, S. “Uyku EEG’sinde Karşılaşılan İğciklerin
(Spindle) Sezimi Üzerine Bir Çalışma”, Yüksek Lisans
Tezi, Ankara Üniversitesi Fen Bilimleri Enstitüsü,
Ankara, (2005)
[4] Özer, Ş., Sağıroğlu, Ş., Kaplan, A., “ Ar Sistem
Modelinde Farklı Algoritmaların Karşılaştırılması”, Gazi
Üniversitesi Mühendislik Mimarlık Fakültesi Dergisi,
19(4): 431-436(2004)
[5] Söderström, T., Stoica, P., “System Identification”,
Printice Hall, New York, 60-95, 320-350 (1989).