Üst Uzuv İçin Hareket Destekleyici Dış İskelet
Robotunun EMG Temelli Kontrolü
Öğrenci Ahmet YAVUZ
Proje Danışmanı Doç. Dr. Erhan AKDOĞAN
Yıldız Teknik Üniversitesi, Mekatronik Mühendisliği Bölümü, Beşiktaş, İstanbul, Türkiye
I.
GİRİŞ
Bu proje çalışmasında üst uzuvlar için hareket destekçisi ve rehabilitasyon amaçlı bir dış iskelet
robotunun tasarımı, üretimi ve kontrolü ile ilgilidir. Sistemde biyomekanik parametrelerin yanı sıra
biyolojik parametreler de göz önüne alınarak kontrol gerçekleştirilmiştir. Biyomekanik geri besleme
elemanı olarak konum ve kuvvet sensörleri, biyolojik geri besleme elemanı olarak kas sinyallerini
3. Masaya ait alt ve üst tabla ergonomiktir. Robotun kullanımı sırasında kullanıcının rahatsız
olmaması amacı ile vücut hatları dikkate alınarak tasarlanmıştır.
4. Uzuv bağlantı elemanları, uzvu yeterli düzeyde sarmakta ve tutmaktadır. Kullanıcının konforu
düşünülerek bağlantı elemanının kol üzerindeki konumu değişebilmektedir. Tutamak, kullanıcının
uzuv boyuna bağlı olarak konumlandırılabilmektedir. Ayrıca özel olarak tasarlanan tutamak içine
kuvvet sensörü yerleştirilmiştir.
algılayan EMG sensörleri kullanılmıştır. Bu nedenle sistem hibrid data birleştirme yöntemi kullanan,
servo motorlarla tahrik edilen, 2 serbestlik dereceli, seri tip mekanik yapıya sahip olan bir robotik
V. EMG SİNYALLERİNİN İŞLENMESİ
EMG Sinyal İşleme Adımları:
sistemdir.
II. PROBLEM VE AMAÇ
Problem: Üst uzuv dış iskelet hareket destekçileri ve rehabilitasyon amaçlı sistemlerdeki problemler
Şekil 3: EMG sinyal işleme adımları
şunlardır: uygun mekanik yapı, ergonomi, dayanım, uyumlu çalışma, kararlılık, yörünge takibi
Amaç: Üst uzuvlara yönelik hareket destekçi ve rehabilitasyon amaçlı olarak kullanılabilecek, insan
EMG devresi tasarlanırken sinyal işleme adımları uygulanmıştır. Yükseltme ve filtreleme adımları
robot etkileşimini yeterli seviyede sağlayan, uzuv boyutuna göre ayarlanabilir, her iki kol için kullanıma
donanımsal, normalizasyon kısmı ise yazılımsal olarak yapılmıştır. EMG sinyallerinin doğruluğu
uygun, hibrid data birleştirme yolu ile geri besleme yaparak kontrol çevrimine hem biyomekanik hem
sistemin kontrolü ve kullanıcının kas aktivitesinin takibi için oldukça önemlidir.
de biyolojik parametreleri alan iki serbestlik dereceli bir dış iskelet robotunun tasarımı, üretimi ve
kontrolü amaçlanmıştır.
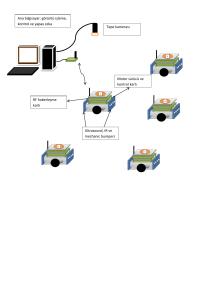
III. DIŞ İSKELET ROBOT SİSTEMİ
Sistem özellikleri:
Omuz ve dirsek için fleksiyon-ekstansiyon hareketlerini gerçekleştirir.
2 serbestlik dereceli seri tip mekanizma yapısına sahiptir.
Servo motor tahriklidir.
Şekil 4: EMG elektrot konumlandırılması
Şekil 5: EMG sinyal işleme devresi
Kas kasılma seviyesi (KKS) aşağıda verilen bağıntıya göre hesaplanır.
5 kg yük kaldırma kapasitelidir.
Uzuv boyutuna göre ayarlanabilir.
Her iki kol için kullanılabilir.
EMG sinyalleri ile biyolojik geri besleme yapılır.
Konum, kuvvet sensörleri ile biyomekanik geribesleme yapılır.
Güvenlik, yazılım ve donanım kontrollü olarak çift katlı sağlanır.
VI.
MODLARA GÖRE KAS - ROBOT AKTİVASYONU
Temelde kasların ve robotun aktif-pasif çalışma durumu üzerine kurulmuş üç ayrı mod
bulunmaktadır. Bu modlar kullanıcının ya da terapistin tercihi üzerine seçilebilmekte veya
değiştirilebilmektedir. Bahsedilen modlar aşağıdaki gibidir:
1) Yük Kaldırma Modu: Hem kaslar hem de robot aktif olarak çalışır. Kas üzerindeki zorlanma robot
tarafından belirlenen sınırlarda minimize edilmek istenir. Yani 5 kg’lık bir ağırlığın 4 kg’ı robot
tarafından, 1 kg’ı ise robot tarafından kaldırılır.
2) Rehabilitasyon Modu: Kaslar pasif, robot aktif olarak çalışır. Robotun omuz ve dirsek eklemleri
için fleksiyon-ekstensiyon hareketlerini belirlenen açılarda uygulaması ile kaslar pasif olarak
çalıştırılır ve kasların ürettiği sinyaller beyne aktarılır. Devamlı olarak yaptırılan hareket beyin
tarafından öğrenilir. Bu sayede uzuv için geri kazanım süreci yürütülür.
3) Egzersiz Modu: Kas aktif, robot yarı aktif olarak çalışır. Bu modda kullanıcının kas gelişimi için
çalışmalar yürütülür. Robot, daha düşük kas gücü olan bir birey için daha az tersine tork uygularken
daha güçlü kaslar üzerinde yapılan geliştirme tedavilerinde daha yüksek tersine tork üretir. Dirsek
Şekil 1: Dış iskelet robot sistemi
eklemi için maksimum 15 Nm, omuz eklemi için ise 30 Nm tersine tork üretilebilmektedir.
VII. SONUÇLAR
IV. DIŞ İSKELET ROBOTUNUN MEKANİK YAPISI
Dış iskelet robotu; yapılan tüm statik – dinamik analizler
ışığında tasarlanmıştır. Bahsedilen tüm modlar için
tasarlanan arayüzler ile bilgisayar üzerinden takip imkanı
sağlanmaktadır. Biyomekanik geri besleme elemanı;
enkoderler ve kuvvet sensörü ve biyolojik geri besleme
elemanı; EMG devresinden gerekli veriler alınabilmekte
ve bu veriler kontrolcüye yazılmış gömülü algoritma ile
değerlendirilmektedir. Sistemin hareketi için PID kontrolü
yöntemine başvurulmuştur.
Rehabilitasyon modunda yaptığımız çalışmada; arayüz
üzerinden omuz ve dirsek eklemleri için ayrı ayrı
belirlenen
Şekil 2: Sistemin Mekanik Tasarımı
minimum-maksimum
açı
sınırları
bilgisi
kontrolcüye gönderilmiştir. Kontrolcü, belirlenen sınırlarda
1. Robot profili ve masa bacağı üzerinden hem oturarak hem de ayakta kullanım boy ayarlama
PID kontrolü ile hareketi etkili bir biçimde sağlamıştır.
imkanı mevcuttur. Ek olarak konum değişikliği yapılabilmesi için frenli tekerleklere sahiptir.
EMG devresiyle, pasif uzuv üzerinde oluşan hareketliliğin
2. Sistem uzuv boyutuna göre buradaki kızak mekanizmasından ayarlanır. Ayrıca gene bu resimde
neden olduğu kas sinyalleri gözlemlenmiştir ve biyolojik
görülen aparat ile her iki kol için kullanılabilir.
Şekil 7: Rehabilitasyon modunda çalışma
geribeslemeler başarı ile kayıt altına alınmıştır.
Referanslar
[1] Riener, R., Nef, T., Colombo, G., ―Robot-aided neurorehabilitation of the upper extremities.‖, Med. Bio. Emg. Comp., 2005.
[2] Leifer, L., ―Rehabilitive Robotics‖, Robot Age, pp:4-11, 1981.
[3] Kwee, H., Duimel J., Smit, J., De Moed, A.T., Van Woerden, J., Kolk, L.V.D., ―The Manus Wheelchair-mounted manipülatör: Developments Toward a Production Model‖, Proc. 3rd Int. Conf. Assoc. Aadvancement
Rehab. Tech., 1988.
[4] A Myosignal-Based Powered Exoskeleton System, Jacob Rosen, Moshe Brand, Moshe B. Fuchs, and Mircea Arcan
[5] The Cybernetic Rehabilitation Aid: a Novel Concept for Direct Rehabilitation, Erhan AKDOĞAN* , Keisuke Shima**, Hitoshi Kataoka**, Masaki Hasegawa***, Akira Otsuka***, Toshio Tsuji**
İletişim Bilgileri:
Öğrenci:
Ahmet YAVUZ
[email protected]
Proje Danışmanı:
Erhan AKDOĞAN
[email protected]