T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
ÖLÇME ve DONANIM LABORATUARI
DENEY FÖYÜ
2015 - 2016 Güz Dönemi
1
İÇİNDEKİLER
SAYFA
İçindekiler
2
Öğrencilerin Alması Gereken Malzemeler
3
Rapor Yazım Kılavuzu
3
Rapor Kapak Formatı
5
Deney No 1: Bilgisayar, Donanım ve Yazılım Kavramları
6
Deney No 2: Direnç, Voltaj ve Akım Ölçümleri
24
Deney No 3: Ohm Kanunu ve Kirchoff Kanunları
32
Deney No 4: Düğüm Gerilimleri ile Devre Çözümü
36
Deney No 5: Thevenin ve Norton Teoremleri
42
Deney No 6: Süperpozisyon Teoremi
48
Deney No 7: Osiloskop Kullanarak Genlik ve Sıklık Ölçümü
52
Deney No 8: RL ve RC Devrelerin AC ve DC Analizi
60
2
1. Öğrencilerin Alması Gereken Malzeme Listesi
1 adet breadboard
Bağlantı kablosu (Zil teli)
5 adet 10 Ω direnç
5 adet 100 Ω direnç
5 adet 120 Ω direnç
5 adet 150 Ω direnç
5 adet 180 Ω direnç
5 adet 270 Ω direnç
5 adet 330 Ω direnç
5 adet 560 Ω direnç
5 adet 680 Ω direnç
5 adet 820 Ω direnç
5 adet 1 kΩ direnç
5 adet 1,2 kΩ direnç
5 adet 1,5 kΩ direnç
5 adet 1,8 kΩ direnç
5 adet 2,2kΩ direnç
5 adet 2,7kΩ direnç
5 adet 3,3kΩ direnç
5 adet 5,6 kΩ direnç
5 adet 6,8 kΩ direnç
5 adet 10 kΩ direnç
5 adet 12 kΩ direnç
1 adet 10 kΩ potansiyometre
1 adet 100 kΩ potansiyometre
3 adet 1nF kondansatör
3 adet 10 nF kondansatör
3 adet 100nF kondansatör
3 adet 10uF kondansatör
3 adet 100uF kondansatör
1 adet 1 mH bobin
1 adet 4.7 mH bobin
1 adet 10mH bobin
3
2. Rapor Yazım Kılavuzu
Laboratuar raporları, bilimsel bir çalışmada elde edilen sonuçları sunmak üzere aşağıdaki kurallara uygun
olarak hazırlanacaktır.
Grup elemanları her deneyden sonra bireysel bir rapor hazırlayacaklardır. Raporlar beyaz A4 kâğıtlarının tek
yüzüne okunaklı bir el yazısı ile yazılarak hazırlanacaktır. Çizimler ve grafikler milimetrik kağıda uygun
şekilde yapılacaktır. Bu nedenle her öğrenci yanında milimetrik kağıt bulundurmalıdır. Raporlar, deneyi
yapan öğrencinin isminin, imzasının, tarih ve e-mail adresinin yer aldığı tek tip kapak sayfası ile
başlayacaktır. Bunların dışında farklı yapılarda kapaklar kullanmayınız. Raporlar deneyin yapıldığı tarihten
bir hafta sonra deney saatinde teslim edilmelidir. Teslim zamanından daha geç getirilen raporlar kabul
edilmeyecektir. Teslim edilmeyen raporların notu sıfır olarak belirlenecektir. Raporlar aşağıdaki
bölümlerden oluşacaktır:
Amaç: Deneyde hangi konuların incelenmesi ve öğrenilmesi amaçlanmaktadır?
Her deney bölümü için:
Tüm hesaplamalar açıkça gösterilmelidir.
Sonuçlar: Deneyin her bölümü için elde edilen sonuçlar (tablo, çizim, gözlem) düzgün ve okunaklı
bir şekilde yazılacak ve yorumlanacaktır. Eğer deneyde istenmişse teorik olarak beklenen değerler
ile deneyde elde edilen sonuçlar karşılaştırılacaktır.
Sorular: Eğer deneylerde sorular verilmişse cevapları rapora yazılacaktır.
Yorum ve Görüşler: Öğrenciler deneyle ilgili yorum ve görüşlerini bu bölüme yazabilirler.
Deney raporu kapak sayfası aşağıda verilen formatta olmalıdır. (Renkli çıktı olmasına gerek yoktur.)
4
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
ÖLÇME ve DONANIM LABORATUARI
DENEY NO:
DENEYİN ADI:
DENEY TARİHİ:
RAPOR TESLİM TARİHİ:
DENEYİ YAPANIN
Adı-Soyadı
Numara
Bölüm
E-mail
İmza
5
DENEY NO 1: BİLGİSAYAR, DONANIM VE YAZILIM KAVRAMLARI
AMAÇ:
Bu deneyin temel amacı bilgisayar parçaları ve diğer elektronik parçaları tanımak ve bu tür elektronik
cihazlar nasıl çalıştığı hakkında temel seviyede bilgi sahibi olmaktır.
GİRİŞ;
Giriş birimleri ile dış dünyadan aldıkları veriler üzerinde aritmetiksel ve mantıksal işlemler yaparak işleyen
ve bu işlenmiş bilgileri çıkış birimleri ile bize ileten, donanım (Hardware) ve yazılımdan (software) oluşan
elektronik bir makinedir.
Bilgisayar donanımı (Hardware): Bilgisayarların fiziksel kısımlarına donanım denilmektedir. Elle
tutulabilirler. Ekran, klavye, Sabit disk (harddisk), fare, yazıcı, bellek, mikroişlemci, tarayıcı,…
Bilgisayar yazılımı (Software): Donanımı kullanmak için gerekli programlardır. Bilgisayarın nasıl
çalışacağını söylerler. Belirli bir işlemi yapmak üzere bilgisayara kurulurlar (setup, install). Örneğin: Kelime
işlem (Word processor) programları son kullanıcıların yazı yazması için kullanılır. Tablolama (spread sheet),
sunu(presentation), programlama dilleri (Pascal, C ...), ses (sound) programı gibi.
TEMEL BİLEŞENLER
6
KASA İÇERİSİNDEKİ BİLEŞENLER
CPU (CENTRAL PROCESSING UNIT) MERKEZİ İŞLEM BİRİMİ
Bilgisayarın beyni olarak nitelendirilebilir. Bilgisayar
donanımının Yönetim ve kontrolü burada yapılır.
İki bölümden oluşur;
Aritmetik ve Mantık Birimi (Arithmetic & Logic Unit ALU) : Dört işlem, verilerin karşılaştırılması,
karşılaştırmanın sonucuna göre yeni işlemlerin seçilmesi
ve kararların verilmesi bu birimin görevidir.
Kontrol Ünitesi ( Control Unit -CU) : Işlem akışını düzenler,
komutları yorumlar ve bu komutların yerine getirilmesini
sağlar.
7
MICROPROCESSOR TARİHÇESİ
Intel 4004 chip
CPU olarak adlandırılan bir mikroişlemci tek bir chip
üzerinde üretilmiş komple bir hesaplama motorudur. İlk
mikroişlemci Intel 4004 adı ile 1971 yılında üretilmiştir.
4004 işlemci sadece toplama ve çıkarma işlemlerini
yapabilen 4 bitlik bir işlemci idi. Fakat her şey tek bir chip
de toplandığı için bu çok önemli bir gelişme idi. 4004 den
önce bilgisayarlar birden fazla chip kullanılarak veya farklı
bileşenlerin birleştirilmesi ile üretiliyordu. 4004 ile
taşınabilir elektronik hesap makineleri da büyük bir
gelişme kaydetmişti. Kişisel bilgisayarlar (PC) için
geliştirilen ilk mikroişlemci Intel 8080 dir ve 8-bit lik
teknolojiye sahip olup 1974 yılında tanıtılmıştır. Bununla
birlikte bilgisayar dünyasındaki gerçek sıçrama 1979
yılında üretilen Intel 8088 dir. Intel 8088 işlemcisi IBM
PC lerde kullanılmıştır (1982). Daha sonraları 80286 to the
80386 to the 80486 Pentium to the Pentium II to the
Pentium III to the Pentium 4 işlemcileri geliştirilmiştir.
Tüm bu işlemciler Intel tarafından geliştirilmiş olup hepsi
8088 işlemcisinin temel tasarımı üzerinde yapılan
değişiklikler ile geliştirilmiştir. Pentium 4 işlemcisi orijinal
8088 işlemcisi üzerinde çalışan her türlü kodu 5000 kat
daha hızlı çalıştırabilmektedir.
1366 iğneli core i7
Transistor sayısı çip üzerindeki transistör adedini göstermektedir. Tablodan da görüleceği gibi transistör
sayısı yıllara bağlı olarak düzenli bir artış göstermiştir.
Intel işlemcilerin gelişimi;
8
Micron chip üzerindeki en ince telin mikron cinsinden kalınlığını göstermektedir. Karşılaştırma için, insan
saçı 100 micron kalınlığındadır. İşlemcilerdeki boyutlar düşerken transistör sayısı sürekli artmaktadır.
Clock speed chip’in ürettiği maksimum clock adedidir. Chip üzerinde bulunan kuartz kristali ile elde edilen
her clock (pulse) bir işlemin yapılması için gereklidir.
Data Width ALU nun genişliğidir. 8-bit lik bir ALU iki adet 8 bit sayıyı toplayabilir, çıkartabilir, çarpabilir
vs. Bununla birlikte 32-bit lik bir ALU 32 bit lik sayılar için aynı işlemleri yapabilir. 8-bit lik bir ALU 32-bit
lik iki sayı için yukarıdaki işlemleri dört hamlede yapar iken, 32-bit lik bir ALU bu işlemleri bir defada
yapabilmektedir Çoğunlukla yapabilmektedir. dış veri yolları (external data bus) ALU ile aynı genişlikte
olurlar. 8088 işlemcisi 16-bit ALU ya ve 8-bit lik veri yollarına sahipti. Bununla birlikte modern Pentium
işlemciler bir defasında 64 bitlik bilgiyi 32-bit lik ALU larına aktarabilirler. MIPS "millions of instructions
per second" saniyede yapılan işlem sayısını ifade etmektedir ve CPU ların performansını ölçmek için
kullanılan bir birimdir. Fakat modern CPU ların performansını ölçmek için günümüzde sık kullanılan bir
birim değildir.
MICROPROCESSOR İŞLEMLERİ
Bir CPU da yapılan işlemler “bit pattern” leri olarak tasarımlanırlar ve işlemcinin yapması istenilen işlemler
sayısal karşılığı olan kodlar ile tanımlanırlar. Fakat bilgisayar kullanıcıları için sayısal komutları hatırlamak
çok güç olduğu için bu işlemleri yapmak amacı ile bazı komutlar geliştirilmiştir. Bu komutlarını o işlemciye
ait assembly dili adı verilmiştir.
Assembler programları komutları bit patternleri haline rahatlıkla dönüştürebilmekte ve bu sayede işlemci
istenilen işi yapabilmektedir.
Hafıza Çeşitleri
RAM
ROM
Cache
Dynamic RAM
Static RAM
Flash Memory,
Memory Sticks
Virtual Memory
BIOS
9
RAM (RANDOM ACCESS MEMORY)
RAM genel olarak Bilgisayar hafızası olarak bilinir. Rastgele erişilebilir bellek olarak adlandırılmıştır,
çünkü RAM içerisindeki her bir hücreye istenildiği anda bilgi yazılabilir ve silinebilinir, içeriği okunabilir.
Mikroişlemcilere benzer olarak hafıza chip leri de milyonlarca transistör ve kapasitörden oluşan entegre
devrelerdir. Genel hali ile bilgisayar hafızalarında (DRAM, Dynamic Random Access Memory) bir
transistör ve bir kapasitör birlikte bir hafıza hücresini oluştururlar ve tek bir bit bilgiyi temsil ederler.
Kapasitör bir bitlik bilgiyi (0 veya 1) tutar, transistör ise bir anahtar görevi görerek bilginin okunmasını veya
değiştirilmesini kontrol eder. Kapasitör elektronları bir kova şeklinde düşünülebilir. Bir Hafıza hücresinde
“1” bilgisini tutabilmek için kovanın yani kapasitörün elektronlar ile dolu olması gerekmektedir. “0”
bilgisini hafızada tutmak için ise kovanın yani ilgili kapasitörün boş olması gerekmektedir. Buradaki temel
problem kovadaki elektron kayıplarıdır. Birkaç milisaniye içerisinde kova kayıplardan dolayı
boşalabilmektedir. Bu nedenle dinamik hafızaların işlevlerini yerine getirebilmeleri için “1” bilgisini tutması
gereken hafıza hücrelerindeki kapasitörlerin CPU veya memory controller tarafından sürekli doldurulması
gerekmektedir. Bunun için memory kontroleri hafızayı okur ve dolu olması gerekenlerin sürekli dolu
olmasını sağlar. Bu tazeleme işlemi saniyede binlerce kez yapılır.
RAM TİPLERİ
SRAM
Static random access memory herbir hafıza hücresi için çoklu transistör, 4 den 6 ya kadar, kullanmaktadır
ve kapasitör bulundurmamaktadır. Transistör sayısı fazla olduğu için daha fazla yer kaplamakta fakat sürekli
tazeleme gerektirmediği için (refresh) dinamik RAM lerden çok daha hızlı çalışmaktadır. Genel olarak
Cache bellek olarak kullanılmaktadır.
DRAM
Dynamic random access memory bir adet transistör ve kapasitör çiftinden oluşan hafıza hücrelerine
sahiptirler ve sürekli tazeleme işlemine ihtiyaç duymaktadırlar.
EDO DRAM
Extended data-out dynamic random access memory Bu tip RAM ler bir hafıza hücresinin (bit) sadece
adresinin tespit edilmesini takiben diğer bit ile ilgili işlemleri yapmak için önceki hafıza hücresinin tam
olarak doldurulmasını beklemezler, bu nedenle bir miktar hızlıdır.
SDRAM
Synchronous dynamic random access memory SDRAM ler EDO RAM lerden biraz daha hızlıdırlar.
Hafıza hücreleri için okuma ve yazma işleminde belirili bir satır ve bu satırdaki ilgili sütunların işlem
görmesi ile yaklaşık %5 lik bir hız artımı sağlanmıştır.
10
DDR SDRAM
Double data rate synchronous dynamic RAM Bu tip RAM ler SDRAM ile benzerdirler, aradaki farklılık
data aktarım genişliğinde sağlanan artımdır ki bu da yüksek hız anlamına gelmektedir.
RDRAM
Rambus dynamic random access memory RDRAM leri diğer RAM lerden üstün ve farklı kılan özelliği
kullandığı yüksek hızlı “Rambus channel” olarak adlandırılan veri yoludur. RDRAM hafıza chip leri 800
MHz hızında veri transferi ile çalışabilirler. Yüksek hızlı çalıştıklarından dolayı diğer hafıza chip lerinden
daha fazla ısı üretilirler ve bu ısıyı uzaklaştırmak için kendi soğutucuları vardır.
CMOS RAM
CMOS RAM küçük miktardaki hafıza ihtiyaçlarını karşılamak üzere kullanılan bir tanımlamadır, örneğin
bilgisayarımızdaki Hard disk ayarlarını saklamak için kullanılmaktadır. Bu RAM ler içeriklerini
koruyabilmek için küçük pillere ihtiyaç duymaktadır.
VRAM
VideoRAM ler ayrıca multiport dynamic random access memory (MPDRAM) olarak da bilinirler ve
video adaptörleri veya 3 boyutlu grafik hızlandırıcıları için kullanılırlar. "multiport" kelimesi VRAM in iki
adet bağımsız erişim kanalı kullanmasından dolayı kullanılmaktadır. Bu kanallardan biri CPU diğeri ise
grafik işlemcisinin RAM’e eşzamanlı erişimi için kullanılmaktadır.
VRAM grafik kartı üzerinde bulunmaktadır. VRAM ihtiyacını belirleyen faktörler ekrana ait çözünürlük
“resolution” ve renk derinliği “color depth” dir.
ROM (READ ONLY MEMORY) SALT OKUNABİLİR BELLEK
Read-only memory (ROM), firmware olarak da bilinirler, üretimleri esnasında özel bilgiler ile
programlanmış Hafıza tipleridir. ROM chipleri sadece bilgisayarlarda değil birçok elektronik cihazda da
kullanılmaktadır.
ROM Tipleri
Temel olarak beş adet ROM tipi bulunmaktadır
ROM (Read Only Memory)
PROM (Programmable Read Only Memory)
EPROM (Electrically Programmable Read Only Memory)
EEPROM (Electrically Erasable Programmable Read Only Memory)
Flash memory
Farklı ROM tipleri olmakla birlikte hepsi için temel iki özellik bulunmaktadır.
Bu tip hafızalarda elektrik olmasa dahi bilgiler kaybolmazlar.
Bu tip hafızalarda tutulan bilgiler ya değiştirilemezdir, ya da değiştirilmeleri için özel işlemler
gerekmektedir.
ROM Yapısı
RAM lere benzer olarak, ROM chipleri de satır ve sütunlardan oluşan bir matris yapısına sahiptir. Fakat satır
ve sütunların kesiştiği yerlerde (hafıza hücreleri), ROM chipleri RAM chiplerinden temel farklılıklar
göstermektedir. RAM ler her bir hafıza hücresinde kapasitörlere erişimi sağlamak için transistör kullanırken,
ROM chipleri diyodlar kullanmaktadır. Eğer bir ROM hücresindeki bilgi 1 ise satır ve sütun birleştirilir,
eğer değer 0 ise satır ve sütunların kesiştiği bölgede bağlantı kesilmektedir.
11
PROM
Bu tip ROM lar boş olarak temin edilip programlanabilmektedirler. Boş PROM chipleri ucuz olmakla
birlikte programlanması özel araçlar ile yapılmaktadır.
Bu tip ROM larda satır ve sütunlar arasında sigortalar (fuse) bulunmaktadır. ROM un programlanma işlemi
bazı sigortaların yakılması ile bazı satır ve sütunlar arasındaki bağlantıların kesilmesi şeklinde olmaktadır.
Bağlantı olan kesişimlerde değer 1, olmayanlarda ise 0 olarak algılanmaktadır.
EPROM
ROM ve PROM lar ile çalışmak oldukça zaman alıcı bir işlemdir. ROM ve PROM chipleri çok pahalı
olmamalarına rağmen harcanan zaman ve tek kullanımlık olmaları dikkate alındığında maliyet yüksektir. Bu
durumda Erasable programmable read-only memory (EPROM) lar devreye girmiştir. Bu tip ROM
chipleri defalarca yazılabildiği için maliyetleri daha düşük olmaktadır. Programlanmış bir EPROM’u silmek
için özel araçlar gereklidir. Bu araçlar ile belirli frekansta Ultraviyole ışık kullanılmaktadır.
EEPROM
EPROM lar tekrar kullanılabilirlikleri nedeni ile PROM lardan oldukça üstündürler. Fakat yinede EPROM
lar ile işlem yapmak özel araçlar ve hassas laboratuar işlemleri gerektirmektedir. EPROM lar tekrar
yazılırken monte edildikleri yerden sökülüp özel cihazlarda tekrar programlanmaktadırlar ve mevcut
program içerisinde bir kısım değişiklik yapılacak ise, tüm programın silinip tekrar programlanması
12
gerekmektedir. Bu gibi zorlukları ortadan kaldırmak için Electrically erasable programmable read-only
memory (EEPROM) lar geliştirilmiştir.
EEPROM lar;
Tekrar yazılmaları için yerlerinden sökülmeleri gerekmemektedir.
Programın kısmen değişmesi gerektiğinde, mevcut programın tamamının silinmesi gerekmemektedir.
EEPROM ların yazılması için özel ekipmanlara ihtiyaç duyulmamaktadır.
EEPROM ların tekrar yazılması işleminde UV ışığının yerine elektrik alanı kullanılmaktadır. Yazma işlemi
her bir hücreye elektrik alanı uygulamak sureti ile yapılmaktadır ve elektrik alanı her hücreye ayrı ayrı
uygulanmaktadır. Bu zorunluluk EEPROM içeriğinin hızlı bir şekilde değiştirilmesini gerektiren
uygulamalarda düşük hız problemini ortaya çıkarmaktadır.
FLASH MEMORY
Üreticiler bu problemi ortadan kaldırmak için Flash Memory leri geliştirmişlerdir. Bu tip hafızalar bir çeşit
EEPROM olmakla birlikte hücreler arasındaki bağlantılar iç teller ile sağlanmakta, EEPROM un silinme
işlemi tüm EEPROM için aynı anda yapılabilmekte veya blok olarak tabir edilen bazı parçalar için silme
işlemi tek seferde elektrik alanı uygulama sayesinde gerçekleşmektedir. Flash hafızalar normal EEPROM
lardan çok daha hızlı çalışmaktadırlar çünkü bu tip hafızlarda her defasında 512 byte lık bilgi
yenilenebilmektedir, normal EEPROM larda ise bu her defasında 1 byte lık değişiklik yapılabilmektedir.
BIOS
Flash hafızaların en çok kullanılan uygulama alanı bilgisayarların temel giriş/çıkış sistemi olan BIOS lardır.
BIOS temel olarak bilgisayarı oluşturan tüm birimlerin birlikte çalışmalarını denetleyen bir birimdir.
Temel olarak iki farklı yazılım tipi mevcuttur. Birincisi İşletim Sistemi; bilgisayarda çalışan uygulamalar
için bir dizi servis hizmeti verir ve kullanıcı ile bilgisayar arasındaki temel arabirimi oluşturur. Windows
2000, XP, Unix, Linux gibi çeşitleri bulunmaktadır. İkincisi ise Uygulama Yazılımlarıdır. Uygulama
yazılımları bilgisayar ile belirli işlemleri yapmamızı sağlayacak ve programcılar tarafından geliştirilmiş veya
kendimizin geliştirebileceği yazılımlardır. Örneğin şu anki sunumu gerçekleştirmek için kullandığımız MS
Power Point programı gibi. Tüm bunlara ek olarak BIOS bilgisayarın başarılı bir şekilde çalıştırılabilmesi
için gerekli olan ÜÇÜNCÜ tür bir yazılımdır.
BIOS ne yapar?
BIOS birden fazla önemli role sahiptir fakat bunlardan en önemlisi İşletim sisteminin bilgisayara
yüklenmesidir. Bilgisayarınızı açtığınızda ve mikroişlemcinin ilk komutu çalıştırmaya başlaması için bu
komutun ona bir yerden aktarılması gereklidir. Mikroişlemci bu komutu işletim sisteminden alamaz çünkü
13
işletim sistemi HARD DİSK üzerinde bulunmaktadır. Mikroişlemci bu komuta nasıl ulaşacağını kendisine
iletecek bir komut
(açıklama) olmadan bu işlemi gerçekleştiremez. BIOS mikroişlemciye bu bilgiyi sağlamaktadır.
BIOS un gerçekleştirdiği diğer bazı işlemeler şu şekilde sıralanabilir. Bilgisayar sistemini oluşturan
donanımların power-on self test olarak adlandırılan (POST) testini yaparak her şeyin uygun bir şekilde
çalışıp çalışmadığını kontrol eder.
Bilgisayara monte edilen diğer kartlar üzerinde bulunan farklı BIOS chiplerini çalıştırır. (Örneğin Grafik
kartı ve SCSI adaptörü gibi)İşletim sistemi ile iletişimde olan farklı donanımlar için düşük seviyeli bazı
programları içerir. Klavye, Ekran, seri ve paralel portlar bu sınıfa örnek olarak gösterilebilir. Hard disk,
bilgisayar zamanı gibi birim ve bilgiler için mevcut ayarları tutmaktadır. BIOS bilgisayar açılırken tüm
sürücüleri kontrol eder.
SES KARTLARI
Ses kartları bilgisayarlarda dijital olarak üretilen ses bilgisinin hoparlörlere aktarımını gerçekleştiren veya
analog olarak dış ortamdan alınan sesleri dijital olarak bilgisayarda depolamaya yarayan bir donanımdır. Ses
kartlarının kullanımı gündemde değil iken kişisel bilgisayarlar anakart üzerinde bulunan bir hoparlörden
sağlanan “beep” sesine mahkûmdurlar. 1980 lerin sonlarına doğru ses kartlarının kullanılmaya başlaması ile
birlikte bilgisayar kullanıcıları multimedya desteği ile tanıştı ve bilgisayar kullanımı çok daha farklı bir hale
geldi. 1989 yılında Creative laboratuvarlarında geliştiren Creative Labs SoundBlaster® ses kartı piyasaya
sürüldü. Daha sonra birçok firma ses kartı üretimine başladı.
Tipik bir ses kartı aşağıdaki bileşenlerden oluşmaktadır.
Gerekli hesaplamaları yapmak için bir dijital sinyal işlemcisi (DSP)
Bilgisayarda üretilen dijital sinyalleri dış ortama analog olarak aktarmak
için kullanılan bir Dijital – analog çevirici (DAC)
Dış ortamda üretilen analog sesleri bilgisayara dijital olarak kaydetmek için
bir Analog-Dijital çevirici (ADC)
Dataları kaydetmek için bir ROM veya Flash hafıza.
Müzik enstümanlarını bilgisayara bağlamak için Müzical ınstrument digitalk
interface (MIDI) arayüzü
Mikrofon ve hoparlörleri bağlamak için giriş ve çıkış jag ları.
Joystick veya gamepad bağlantısı için bir giriş.
Hard Disk
Hard Disk ler 1950 li yıllarda geliştirilmiştir. İlk zamanlar 20 inç çapında ve sadece birkaç Megabyte’lık
bilgi depolama kapasitesine sahiptiler. Orijinal olarak “sabit disk” olarak adlandırılmakla birlikte daha
sonraları Floppy disklerden ayırt edilebilmeleri için Hard disk olarak adlandırılmışlardır.
14
Hard Disk’lerde performansı belirleyen iki ölçüt mevcuttur.
Data Rate (Data Oranı): Hard disk in bir saniyede CPU’ya aktarabildiği veri miktarıdır. 5 ila 40
Mega Byte lık oranlar yaygın olarak kullanılmaktadır.
Seek time (Arama Zamanı): Arama zamanı CPu nun Hard disk ten bir dosya istediğinde bu dosyanın
ilk Byte’ının CPU’ya gönderildiği zaman miktarıdır. 10 ila 20 milisaniye değerleri yaygın olarak
kullanılmaktadır.
CD ROM – CD WRITERS
CD-ROM’lar disk ve disketler gibi veri depolamak için kullanılan birimlerdir. Veri kaydetme prensibi
manyetik ortamlarda olduğu gibi mıknatıslanma esasına dayanmaz. Optik mantıkla veriler kaydedilirler.
CD-ROM’ların çalışma prensibi bir metal veya plastik disk üzerine LASER ışını ile oyuklar açmaktır.
Bilindiği üzere verilerimiz bilgisayarda 0 ve 1 şeklinde işlenir ve depolanır. Burada sıfır ve biri temsil
edenler ise oyuklar ve tümseklerdir. Bu şekilde oyuklar ve tümsekler oluşturulduktan sıra bunların
okunmasına gelmiştir. CD-ROM sürücüler bu okuma işlemini gerçekleştirirler. CD-ROM sürücünün
okuma/yazma kafası yoktur. Bunun yerine laser ışınını veri üzerine gönderen ve yansımaları sınıflandırarak
elektrik sinyallerine çeviren bir eleman vardır. CD-ROM’lar çok büyük veri saklama kapasitelerine
sahiptirler. Bir CD-ROM yaklaşık 650MB’lık bilgi saklayabilir. Bunun yanında CD-ROM güvenilir veri
saklama birimleridir. Bilgiler fiziksel oyuklar ile oluşturulduğu için CD-ROM üzerine herhangi bir çizik gibi
fiziksel hasarlar yapılmadığı sürece bilgiler uzun süre saklanabilir.
15
16
Ses Oluşumu ve Kaydı
Bilgisayarda Üretilen Seslerin Dış Ortama Aktarılması
17
MONİTÖRLER VE EKRAN KARTLARI
Monitörler bilgisayar ile kullanıcı arasındaki temel arabirimdir. Günümüzde farklı tipte monitörler
olmakla birlikte masaüstü bilgisayarlarda kullanılan temel monitör teknolojisi Katot tüpüdür (CRT).
Bir Televizyonun İç Yapısı
Monitörlerde Renkli Görüntü Oluşumu
Renkli monitörlerde katottan çıkan üç adet elektron beam’ı vardır. Bunlar kırmızı, yeşil ve mavi
olarak adlandırılırlar. Ekran ise tek bir fosfor tabakası yerine üç adet (kırmızı, yeşil, mavi) fosfor tabakası ile
kaplanmış ve bu tabakalar nokta veya katmanlar şeklinde yerleştirilmiştir. Eğer monitöre yakından bir
büyüteç ile bakılırsa bu noktalar ve tabakalar görülebilir. Fosfor tabakasına çok yakın ve tüpün iç yüzeyinde
18
shadow mask olarak adlandırılan bir metal panel bulunmaktadır. Bu panel kırmızı yeşil ve mavi fosfor
noktaları ile ayarlanmış çok küçük deliklerle donatılmıştır.
Monitörlerde Bazı Temel Kavramlar
İki temel ölçüt ekran boyutlarını belirlemede kullanılmaktadır. Aspect ratio ya da ekran boyutu.
Birçok bilgisayar monitörü 4:3 oranını kullanmaktadır. Bu ekran genişliğinin ekran yüksekliğine oranının
4:3 olduğu anlamına gelir. Diğer bir oran ise 16:9’dur ki bu oran genellikle sinema filmlerinde kullanılır.
Ekran boyutları genel olarak ekranın diyagonal mesafesinin inç (1 inch = 25.4 mm) olarak verilmesi ile ifade
edilir.
Günümüzde kullanılan ekran boyutları 15, 17, 19ve 21 inç’dir. Notebooklarda ise bu değerler daha
düşüktür. (12 ila 15 inch)
Çözünürlük(Resolution)
Çözünürlük kavramı bir ekran için sahip olduğu toplam piksel sayısını ifade etmektedir. Piksel
kırmızı, yeşil ve mavi renk üçlüsünün oluşturduğu birimi ifade etmektedir. Çözünürlük genel olarak satır ve
sütun olarak piksel sayısının verilmesi ile ifade edilir. Örneğin 640x480, 1024x768 gibi.
Dot pitch kavramı pikseller arasındaki mesafeyi tanımlamaktadır (mm olarak). Genel olarak 0.31
mm, 0.28 mm, 0.27 mm, 0.26 mm ve 0.25 mm dot pitch’e sahip monitörler kullanılmaktadır.
Televizyonlarda bu değer 0.51 mm’dir.
CRT teknolojisine sahip monitörlerde tazeleme oranı kavramı (refresh rate) ekrandaki görüntünün bir
saniye içerisinde kaç kez görüntülendiğinin sayısıdır.
Örneğin 72 Hz’lik tazeleme oranına sahip bir monitörde ekrandaki pikseller en üst sıradan en alt
sıraya doğru olmak üzere saniyede 72 kez yenilenirler.
Düşük tazeleme oranları ekranda titreşimlere yol açar.
19
Renk derinliği kavramı monitörlerdeki renk kalitesini ifade etmektedir. Monitörde gösterilebilecek
renk adedi bu tanımlama ile ifade edilir. Örneğin SuperVGA (SVGA) bir ekran 16,777,216 adet farklı rengi
görüntüleme yeteneğine sahiptir. Çünkü 24 bitlik bir renk derinliğine sahiptir. 24 bitlik renk derinliğinde her
renk için kırmızı, yeşil ve mavi 8 bitlik kullanım söz konusudur. Bu renk derinliği gerçek Renk (True Color)
olarak adlandırılır. Çünkü insan gözü 10 milyon rengi ayırt etme yeteneğine sahiptir.
LCD Ekranlar
LCD ekranlar genelde notebooklarda kullanılan
Likit kristallerin elektrik alanına tabi tutularak yönlerini
20
ekranlardır.
değiştirmesi
ve ışığı geçirip geçirmeme prensibine göre çalışmaktadırlar.
Klavye ve Mouse
Klavye üzerinde kendi mikroişlemcisi bulunan bir giriş
birimidir.
Fare (Mouse)
21
Klasik mouse’lar (toplu) topun sürtünmesi ile
hareket eden ve uçlarına encoder bağlı diskler
yardımı ile düzlem üzerindeki konumun
belirlenmesini
sağlar.
Optik Mouse
Optik Mouse larda düzlemdeki hareket Mouse
içerisinde bulunan bir kamera yardımı ile tespit
edilmektedir.
Optik
Mouselar
Agilent
Technologies
tarafından 1999 yılı sonunda piyasaya sürülmüş
olup, saniyede 1500 resim alan küçük bir
kamera içermekte idi. Optik mouse lar hemen
hemen tüm yüzeylerde çalışmakta olup, alt
yüzeyde kırmızı bir ışık yayan bir led
bulunmaktadır ve bu yayılan
bu ışık yüzeyden yansıyarak bir CMO sensörü tarafından algılanmaktadır. Bu sensör her bir görüntüyü bir
Dijital sinyal prosesörüne (DSP) analiz için aktarmaktadır. DSP saniyede 18 Milyon ve üzeri işlem
yapabilme kapasitesine sahiptir. Peş peşe gelen görüntüler işlenerek görüntüler arasındaki farklılıktan
hareketle hareket miktarını algılamaktadır.
22
DENEY NO 2: DİRENÇ VOLTAJ VE AKIM ÖLÇÜMLERİ
Amaç: Dirençlerin üstündeki renklere bağlı olarak direnç değerini okuma, voltaj, akım ve direnç değerlerini
Avometre kullanarak ölçme.
A) GİRİŞ:
A.1. Avometre
Ampermetre, voltmetre ve ohmmetrenin bir gövde içinde birleştirilmesiyle üretilmiş ölçü aletine AVOmetre
denir. Analog ya da dijital yapılı olarak üretilen ve en yaygın kullanım alanına sahip olan bu aygıt ile DC
gerilim, AC gerilim, DC akım, AC akım ve direnç ölçülebilir.
AVOmetrelerin geliştirilmiş olan modeline ise multimetre denir. Multimetreler ilave olarak, diyot, transistör
kazancı, frekans, kondansatör kapasitesi, sesli kısa devre kontrolü (buzzer, bazır), sıcaklık vb. ölçümünü de
yapabilir.
Şekil 1: Avometrenin sembolik gösterimi
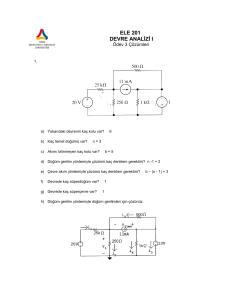
A.1.1. Avometre’nin akım modu: Bu modu kullanabilmek için şu yöntem takip edilmelidir.
Avometre’deki uygun mod seçilmelidir.
Akım ölçümünü yapmak istediğimiz terminale avometre seri olarak bağlanır. Avometre’nin
içdirenci sıfır kabul edilerek ölçüm yapılır.
DC devrelerde akımın yönü önemlidir. Avometre’nin ters bağlanması durumunda okuyacağımız
değer negatif olacaktır.
23
Şekil 2: Akım ölçümü
Şekil 2’de görüldüğü gibi I2 akımı ölçülmek isteniyorsa akımını ölçmek istediğimiz yere Avometreyi seri
olarak bağlayarak ölçümü gerçekleştirebiliriz.
A.1.2. Avometre’nin voltaj modu:
Avometredeki uygun mod seçilmelidir.
Voltaj ölçümünü yapmak istediğimiz terminale avometre paralel olarak bağlanır. Avometrenin
içdirenci sıfır kabul edilerek ölçüm yapılır.
DC devrelerde voltajın yönüne dikkat edilmelidir. Avometrenin ters bağlanması durumunda
okuyacağımız değer negatif olacaktır. Bunun yanında AC devrelerde bu durumun bir önemi
yoktur.
Şekil 3: Voltaj ölçümü
1. DC Voltaj Ölçümü
Kırmızı probu “V/Ohm” terminaline siyah probu COM terminaline takınız.
Fonksiyon anahtarını gerekli kademeye getiriniz.
AC/DC anahtarını “DC” ye çeviriniz.
Eğer voltaj değeri ölçülmüyorsa max kademeye doğru adım adım istediğiniz değeri bulana
kadar çeviriniz.
Her iki prob da test yapılacak voltaja takılarak sonuç görülür.
24
Şekil 4: DC Voltaj ölçümü
2. AC voltaj ölçümü
Kırmızı probu “V/Ohm” terminaline siyah probu COM terminaline takınız.
Fonksiyon anahtarını gerekli kademeye getiriniz.
AC/DC anahtarını “AC” ye çeviriniz.
Eğer voltaj değeri ölçülmüyorsa max kademeye doğru adım adım istediğiniz değeri bulana
kadar çeviriniz.
Her iki probda test yapılacak voltaja takılarak sonuç görülür.
Şekil 5: AC Voltaj ölçümü
3. Akım Ölçümü
Kırmızı probu “mA” terminaline takınız.
Eğer test edilen akım 200 mA den fazla ise kırmızı probu “10A” jackına takınız. Siyah
probu “COM” a takınız
Her iki probu da test yapılacak devre akımına takarak ölçüm yapılır.
Şekil 6: Akım ölçümü
4. AC Akım Ölçümü
25
Kırmızı probu “mA” terminaline takınız.
Eğer test edilen akım 200mA den fazla ise kırmızı probu “10A” jackına takınız ve siyah
probu “COM” a takınız.
Fonksiyon anahtarını gerekli kademeye getiriniz.
AC/DC anahtarı “AC” ye çeviriniz.
Eğer voltaj değeri ölçülmüyorsa maximum kademeye doğru adım adım istediğiniz değeri
bulana kadar çeviriniz.
Her iki prob da test yapılacak devreye takılarak akım değeri ölçülür.
Şekil 7: AC Akım ölçümü
5. Direnç Ölçümü Ω
Kırmızı probu “V/Ω” terminaline siyah probu COM terminaline takınız.
Fonksiyon anahtarını gerekli kademeye getiriniz.
Eğer akım değeri bulunmuyorsa maximum kademeye doğru adım adım istediğiniz değeri
buluncaya kadar çeviriniz.
Test yapılacak komponente probları takılarak ölçüm değeri alınır.
Şekil 8: Direnç ölçümü
6. İndüktans Ölçümü
Anahtarı gerekli kademeye getirip “LC” butonuna basınız.
Eğer indüktans değeri ölçülmüyorsa maximum kademeye doğru adım adım istediğiniz değeri
bulana kadar çeviriniz.
Çoklu amaç soketini seçiniz veya bu ölçüye göre test kliplerini seçiniz. İndüktansın uçlarını
test ediniz ve iki ucu “mA” ve “V/Ω” terminallerine takınız ve ölçümü yapınız, ekranda
indüktansın değerini bir kez daha göreceksiniz.
26
Şekil 9: İndüktans ölçümü
7. Kapasitans Ölçümü
Anahtarı “C” konumuna getirip “LC” butonuna basınız.
Eğer kapasitans değeri ölçülmüyorsa maximum kademeye doğru adım adım istediğiniz
değeri bulana kadar çeviriniz.
Çoklu amaç soketini seçiniz veya bu ölçüye göre test kliplerini seçiniz. İndüktansın uçlarını
test ediniz ve iki ucu “mA” ve “V/Ω” terminallerine takınız ve ölçümü yapınız, ekranda
indüktansın değerini bir kez daha göreceksiniz.
Doğruluğu sağlamak için genellikle düşük kapasitans kademesi 20nF seçilir, doğru okuma
devrenin açık devreden farkı olmalıdır.
Şekil 10: Kapasite ölçümü
8. Frekans Ölçümü
Kırmızı probu “V/ Ω” terminaline siyah probu COM terminaline takınız.
Anahtarı “10MHz” terminaline takınız.
Bu kademe otomatik kademedir ve ekranda frekans değerini gösterir. Mümkün olduğu kadar
her iki probun da temasını sağlayınız ve sonunda test sinyali alınız.
Şekil 11: Frekans ölçümü
27
9. Sıcaklık Ölçümü
Siyah temperature probunu “mA” terminaline kırmızı olan probu “V/ Ω” terminaline takınız.
Fonksiyon anahtarını “TEMP” kademesine getiriniz ve objeyi test ediniz.
Şekil 12: Sıcaklık ölçümü
10. Transistör Ölçümü
Anahtarı “hFE” konumuna çeviriniz.
Çoklu amaç soketini “mA” ve “V/ Ω” terminaline doğru takınız.
Doğru bir şekilde Base ( B ), Emitter ( E ), Collector ( C ) yi uyacak şekilde PNP ve NPN
tipine bağlı olarak transistor ü takılarak yaklaşık değer ölçümü yapılır.
11. Diode veya PN boğumlu Transistör Ölçümü
Kırmızı test probunu “V/ Ω” terminaline ve siyah probu “COM” terminaline takınız.
Anahtarı
konumuna getiriniz.
Kırmızı ve Siyah probların pozitif negatif taraflara test edilen diyot veya PN boğumlu
transistör ve yaklaşık düşen voltajın değeri alınır. Pozitif voltaj düşüşü iyi silikonlu yarı
iletkenlerde 0,5 ile 0,8 V arasında olmalıdır.
12. Süreklilik Buzzer Testi
Kırmızı test probunu “V/ Ω” terminaline ve siyah probu “COM” terminaline takınız.
Anahtarı
konumuna getiriniz.
Her iki probuda test edilecek komponente veya devreye temas ettirdikten sonra direncin
değeri 70 Ω dan düşükse buzzer sesi olarak ikaz edecektir.
28
B. Karbon tipli dirençlerde değer okuma: En çok kullanılan direnç çeşidi karbon tip dirençlerdir. Bu tip
dirençlerde, direncin gövdesinde 4 tane renk bandı vardır. Bu renkler, direncin ohm bazında değerini ve
toleransını gösterirler. Okumaya sola en yakın olan banddan başlanır. Direnç okunması ve renk tablosu
aşağıda verilmiştir.
R= AB x 10C ± D % ohm
Şekil 13: Direnç
Renk Kodları:
Renkler
1.Band
Çarpan
2.Band
Tolerans
0
Siyah
0
0
10
Kahverengi
1
1
101
%1
Kırmızı
2
2
102
%2
Turuncu
3
3
103
Sarı
4
4
104
Yeşil
5
5
105
Mavi
6
6
106
Mor
7
7
Gri
8
8
Beyaz
9
9
Altın
10-1
%5
Gümüş
10-2
%10
Renksiz
%20
29
Şekil 14: Uygulama Devresi
ÖN ÇALIŞMA ÖDEVİ
1. Aşağıda verilen direnç değerleri için uygun renk bandlarını bulunuz.
a) 470 ± 10% b) 1000 ± 5% c) 220 ± 20% d) 330 ± 10%
2.
A
a)
Kırmızı
B
C
D
Siyah
Kırmızı
Gümüş
b) Kırmızı
Kırmızı
Kahverengi
Altın
c)
Mavi
Altın
Altın
Gri
Turuncu
Gümüş
Yeşil
d) Mor
Yukarıda verilen renk bandları için direnç değerlerini bulunuz.
3. Osiloskop, güç kaynağı, multimetre, sinyal jeneratörü, potansiyometre(pot) nedir? Araştırınız.
4. Şekil 14' te verilen adımlardaki devrelerin benzetimini ve ilgili sonuçlarını seçeceğiniz bir simülasyon
programında gerçekleyiniz.
DENEYSEL ÇALIŞMA
1. Şekil 14' te verilen devreyi kurunuz. R1, R2, R3, R4 ve R5 üzerinden geçen, V1,V2,V3,V4 ve V5
gerilimleri bulunuz.
2. Dirençlerin bulunduğu kollar üzerinden geçen I1, I2, I3, I4, I5 akım değerlerini bulunuz.
RAPORDA İSTENENLER
1. Deneyin yapılış amacını birkaç cümleyle açıklayınız.
2. Deneyde kullanılan devrenin teorik çözümlerini yapıp, simülasyon ve deneyde ulaşılan ölçüm
sonuçlarını karşılaştırınız. Farklılıklar var ise sebeplerini açıklayınız.
3. Ölçüm sonuçlarınızı rapora ekleyerek deneyle ilgili görüşlerinizi sonuç bölümüne yazınız.
30
DENEY NO 3: OHM KANUNU VE KIRCHOFF KANUNLARI
Amaç: Deneysel olarak Ohm Kanunu ve Kirchoff Kanunları’nı doğrulama. Seri ve paralel bağlı
dirençlerde voltaj ve akım dağılımlarını gözlemleme.
A) GİRİŞ:
A.1. Kirchoff Akım Kanunu: Bir düğüme giren akımların toplamı, çıkan akımların toplamına eşittir. Ya da
bir düğüme giren ve çıkan akımların toplamı sıfırdır şeklinde ifade edilir.
i2 + i3 = i1 + i4
A.1.1. Kirchoff Voltaj Kanunu: Kapalı bir göz (çevre, loop) içerisindeki toplam gerilim düşümü sıfırdır.
Ya da kapalı bir çevrede harcanan gerilimlerin toplamı, sağlanan gerilimlerin toplamına eşittir.
v1 + v2 + v3 + v4 =0
A.1.2. Ohm Kanunu: Ohm kanunu bir elektrik devresinde iki nokta arasındaki iletkenden üzerinden geçen
akım potansiyel farkla (örn. voltaj veya gerilim düşümü) doğru; fakat iki nokta arasındaki dirençle ters
orantılıdır.
Burada, I akım amper, V referans alınan iki nokta arasındaki potansiyel fark volt ve R ohmla ölçülen ve
direnç olarak adlandırılan devre değişkeni (volt/amper)dir. Potansiyel fark gerilim olarakta bilinir ve bazen
V nin yerine U, E veya emk (elektromotor kuvvet) sembolleri kullanılır. Bu kanun basit elektriksel
devrelerdeki telden geçen akım ve gerilim miktarını açıklar.
31
Ohm kanunu: V = IR
ÖN ÇALIŞMA ÖDEVİ
1.
R1
R2
R5
V1
R4
R3
Yukarıdaki devre için direnç değerleri:
Reş=145 ohm, R2= R3=R5=180 ohm, R4=270 ohm‘dur. R1 direnç değerini hesapladıktan sonra, V1
gerilimini 6 V ve 12 V alarak her bir direnç üzerinden geçen akım ve gerilimi bulunuz. Kirchoff yasalarını
ispatlayınız.
2.
32
Yukarıdaki devre için R1=1.2k, R2=4.7k, R3=R7=2.2k, R4=R5=R6=1.2k ‘dır. Bu devredeki akım kaynağını
(Ana kol akım değeri ) 3mA ve 6mA değerlerinde varsayarak E gerilim değeri ile her bir dirence düşen akım
ve gerilimi bulunuz.
3.
Yukarıdaki devre için a ve b noktaları arasındaki Rab eşdeğer direncini hesaplayınız.
4.
Yukarıda verilen adımlardaki devrelerin benzetimini ve ilgili sonuçlarını seçeceğiniz bir simülasyon
programında gerçekleyiniz.
DENEYSEL ÇALIŞMA
A
R1
R2
R5
V1
R4
R3
B
33
1. Yukarıdaki devrede Reş=145 ohm, R2=R3=R5=180 ohm, R4=270 ohm’dur. V1 gerilimini sırayla 6V
ve 12V alarak tüm dirençler üzerindeki gerilim ve akım değerlerini ölçünüz. Yaptığınız deneysel
çalışmayı teorik olarak çözümlediğiniz sonuçlarla karşılaştırınız.
2. Elde ettiğiniz deneysel sonuçlarla Kirchoff Akım Kanunu ve Kirchoff Gerilim Kanunu’nun
geçerliliğini ispatlayınız.
3. A ve B noktaları arasındaki eşdeğer direnci (RAB) ölçünüz.
RAPORDA İSTENENLER
1. Deneyin yapılış amacını birkaç cümleyle açıklayınız.
2. Ölçüm sonuçları, teorik hesaplamalar ve simülasyon sonuçlarını karşılaştırmalı tablo şeklinde
yazarak rapora ekleyiniz.
3. Deneyde kullanılan devrenin teorik çözümlerini, simülasyon ve deneyde ulaşılan ölçüm sonuçlarını
karşılaştırınız. Farklılıklar var ise sebeplerini açıklayınız.
4. Ulaşılan sonuçlar dikkate alınarak deneyle ilgili yorum, görüş ve kazanımlarınızı yazınız.
34
DENEY NO 4: DÜĞÜM GERİLİMLERİ İLE DEVRE ÇÖZÜMÜ
Bu deneyde, düğüm gerilimleri metodu (Node-Voltage Analysis) devreye uygulanıp pratik olarak çalışması
öğrenilecektir.
KURAMSAL AÇIKLAMALAR
n (kolun) birleştiği noktaya düğüm noktası denir. Bu yöntemde,
Bir devrede üç ya da daha fazla elemanın
devredeki düğüm noktalarından biri referans noktası olarak alınır. Diğer düğüm noktalarının gerilim
değerleri bu referans düğümüne göre bulunur. Bir devredeki düğüm noktalarının sayısı ise, referans düğüm
noktası çıkarılınca geriye n 1 adet düğüm noktası kalır. n 1 adet bilinmeyen gerilim değeri olduğu
için n 1 adet denkleme ihtiyaç vardır. Her düğüm noktası için Kirchhoff akım yasası uygulanarak düğüm
denklemi yazılır. Aşağıdaki devre için düğüm denklemlerini yazalım.
R1=6.8KΏ, R2=12KΏ, R3=12KΏ R4=12KΏ, R5=1.8KΏ, Va=10 Volt ve Vb=5 Volt.
Şekil 1.
Kirchhoff akım yasasına göre her bir düğüm noktasında akımlar toplamı sıfırdır. Düğüme gelen akımlar (), çıkan akımlar (+) alınarak akımlar toplamı sıfıra eşitlenir. I i 0
i
Devrenin bağımsız akım denklemleri:
1. düğüm: I1+ I2+ I3=0
2. düğüm: I1+ I2+ I3=0
(1)
Düğüm denklemleri:
V1 Va V1 V1 V2
0
R1
R4
R2
(2)
V2 V1 V2 V2 Vb
0
R2
R5
R3
Devrede 2 adet düğüm bulunduğu için 2 bilinmeyenli 2 denklem yazılmıştır. Bu denklemleri matris şeklinde
yazalım.
35
1
1
1
R R R
4
2
1
1
R2
1
1
V R
R2
1 1
1
1
1 V2
0
R2 R5 R3
0
V
a
1 Vb
R3
(3)
Matrisi, admitans (1/empedans) şeklinde yazarsak;
Y1 Y4 Y2
Y2
Y2
V1 Y1 0 Va
Y2 Y5 Y3 V2 0 Y3 Vb
(4)
Bu matrisler, bilinen metotlardan biri kullanılarak çözülür. V1 ve V2 düğüm gerilimleri elde edilir.
ÖN HAZIRLIK
1. a. Şekil 2’de görülen devredeki düğüm gerilimlerini, düğüm gerilimleri yöntemiyle çözünüz. Bu gerilim
değerleri, ölçüm kâğıdındaki Ön Hazırlık Tablo 1’de 1. satıra doldurunuz.
b. Bulduğunuz düğüm gerilimlerinden yararlanarak tüm eleman akımlarını Şekil 2’de verilen gerilim
referans yönlerine göre hesaplayınız ve ölçüm kağıdındaki Ön Hazırlık Tablo 1’in 2. satırını doldurunuz.
c. Bulduğunuz düğüm gerilimlerinden yararlanarak tüm eleman gerilimlerini Şekil 2’de verilen gerilim
referans yönlerine göre hesaplayınız ve ölçüm kağıdındaki Ön Hazırlık Tablo 1’in 3. satırını doldurunuz.
R1=6.8KΏ, R2=12KΏ, R3=12KΏ R4=12KΏ,
R5=1.8KΏ, R6=1.5KΏ, Va=10Volt ve Vb=5Volt.
Şekil 2.
2. Şekil 3’te görülen devre için 1a.,1b.,1c.’deki işlemleri yaparak ölçüm kağıdındaki Ön
Hazırlık Tablo 2’yi doldurunuz.
36
Şekil 3.
R1=100Ώ, R2=560Ώ, R3=180Ώ, R4=1.2KΏ, R5=680Ώ, R6=1.2KΏ, R7=1.8KΏ, R8=350Ώ, Va=5Volt ve
Vb=12Volt.
2. Şekil 4’te görülen devrede, R5 direnci üzerine düşen gerilimi düğüm gerilimleri metodunu kullanarak
bulunuz.
R1=1KΏ, R2=1KΏ, R3=4KΏ, R4=5KΏ,
R5=2KΏ ve V=10Volt.
R5=2K
Şekil 4.
3. Yukarıda verilen adımlardaki devrelerin benzetimini ve ilgili sonuçlarını seçeceğiniz bir simülasyon
programında gerçekleyiniz.
37
ÖN HAZIRLIK TABLO 1
1. adım
2. adım
3. adım
V1 [V ]
V2 [V ]
V3 [V ]
I R1 [mA]
I R 2 [mA]
I R3 [mA]
I R 4 [mA]
I R5 [mA]
I R 6 [mA]
V R1 [V ]
V R 2 [V ]
VR3 [V ]
V R 4 [V ]
VR 5 [V ]
VR 6 [V ]
ÖN HAZIRLIK TABLO 2
1.
adım
2.
adım
3.
adım
V1 [V ]
V2 [V ]
V3 [V ]
V4 [V ]
V5 [V ]
I R1 [mA]
I R 2 [mA]
I R3 [mA]
I R 4 [mA]
I R5 [mA]
I R 6 [mA]
I R 7 [mA]
I R8 [mA]
V R1 [V ]
V R 2 [V ]
VR3 [V ]
V R 4 [V ]
VR 5 [V ]
VR 6 [V ]
VR 7 [V ]
VR8 [V ]
DENEYİN YAPILIŞI
1. Şekil 2’deki devreyi board üzerine düzgün bir biçimde kurunuz.
a. Avometreyi Voltmetre kademesine getiriniz. Voltmetrenin – (toprak) ucunu referans noktasına bağlayarak
bütün düğüm gerilimlerini sıra ile ölçünüz ve Ölçüm Tablo 1’de 1. satıra kaydediniz. Daha sonra
voltmetrenin - ucunu referans noktasından ayırınız.
NOT 2: GERİLİM ölçülürken ölçü aletinin VOLTMETRE
VOLTMETRENİN devreye PARALEL bağlanacağına dikkat ediniz.
kademesinde
olmasına
ve
b. Bütün dirençlerin üzerine düşen gerilimleri sırası ile Şekil 2’de verilen referans yönlerinde avometre ile
ölçünüz ve Ölçüm Tablo 1’de 3. satıra kaydediniz. NOT 1: AKIM ölçülürken ölçü aletinin
AMPERMETRE kademesinde olmasına ve AMPERMETRENİN devreye SERİ bağlanacağına dikkat
ediniz.
c. Tüm dirençlerden geçen akımları, referans yönlerinde avometreyle ölçünüz ve ölçüm sonuçlarını Tablo
1’deki 2. satıra kaydediniz.
38
d. 2. adımdaki ölçümleri ve direnç değerlerini kullanarak, 1. adımdaki ölçümlerin doğruluğunu gözleyiniz.
Bulduğunuz değerleri ( hesaplayarak ) Ölçüm Tablo 1’de 4. satıra kaydediniz.
2. Şekil 3’teki devreyi board üzerine düzgün bir biçimde kurunuz. 1a., 1b., 1c., 1d. adımlarındaki işlemlerin
aynısını tekrar yaparak Ölçüm Tablo 2’yi doldurunuz.
ÖLÇÜM TABLO 1
Deney
V1 [V ]
V 2 [V ]
V3 [V ]
V R1 [V ]
V R 2 [V ]
VR3 [V ]
V R 4 [V ]
VR 5 [V ]
VR 6 [V ]
I R1 [mA]
I R 2 [mA]
I R 3 [mA]
I R 4 [mA]
I R 5 [mA]
I R 6 [mA]
V1 [V ]
V2 [V ]
V3 [V ]
1. adım
Deney
2. adım
Deney
3. adım
Deney
4. adım
ÖLÇÜM TABLO 2
Deney
V1 [V ]
V2 [V ]
V3 [V ]
V4 [V ]
V5 [V ]
V R1 [V ]
V R 2 [V ]
VR3 [V ]
V R 4 [V ]
VR 5 [V ]
VR 6 [V ]
VR 7 [V ]
VR8 [V ]
I R1 [mA]
I R 2 [mA]
I R 3 [mA]
I R 4 [mA]
I R 5 [mA]
I R 6 [mA]
I R 7 [mA]
I R8 [mA]
V1 [V ]
V2 [V ]
V3 [V ]
V4 [V ]
V5 [V ]
1. adım
Deney
2. adım
Deney
3. adım
Deney
4. adım
39
RAPORDA İSTENENLER
1. Deneyde kullanılan devrelerin düğüm gerilimlerini, düğüm gerilimleri yöntemiyle gerekli işlemleri
yaparak elde ediniz (Teorik hesap). (Ön hazırlıktaki sonuçlarınız doğru ise ön hazırlığı rapora
ekleyebilirsiniz).
2. Ölçtüğünüz düğüm gerilimleri ile ön hazırlıkta bulduğunuz değerleri karşılaştırınız. Farklı çıkıyorsa
nedenlerini açıklayınız.
3. Deneyde kullanılan devrelerin düğüm sayısı nedir? Bu devrelerin çözümü için kaç tane bağımsız akım
denklemine ihtiyaç vardır?
4. Ölçüm kâğıdındaki tabloları rapora ekleyerek deneyle ilgili yorumlarınızı yapınız.
40
DENEY NO 5: THEVENIN VE NORTON TEOREMLERİ
Amaç: Thevenin ve Norton teoremlerinin deneysel olarak doğrulanması.
GİRİŞ:
Thevenin ve Norton teoremlerini vermeden önce gözlerin (mesh) ve düğümlerin (node) (Kirchoff
kanunlarından), ve bir voltaj kaynağı (önceki bölümlerde gördük) ile akım kaynağının tanımlarını yapalım.
Düğüm: Bir devrede düğüm 3 veya daha fazla sayıda iletkenin kesiştiği noktaya denir. Bütün elektrikli
devrelerde bir düğüme giren akımların toplamı düğümden çıkan akımların toplamına eşittir. Ya da o
düğümden geçen akımların cebirsel toplamı sıfırdır:
ΣI=0
Göz: Bir devrede döngü (loop) oluşturan dallar kümesine göz (mesh) denir. Kapalı bir iletken yol olan göz
üzerinde voltajların cebirsel toplamı sıfırdır. Diğer bir deyişle, bir gözde akımlar ile o akımlara karşılık
gelen dirençlerin çarpımlarının toplamı o göz üzerindeki e.m.f lerin cebirsel toplamına eşittir:
ΣE=RI
Voltaj kaynağı.- Kendisinden istenilen akım ne olursa olsun çıkışında bir voltaj üretebilen kaynak olarak
tanımlanır. Pratikte ideal voltaj kaynağı yoktur, çünkü bunların her zaman bir iç direnci bulunur. Bu iç
dirençten de geçen akım burada bir voltaj düşümüne neden olur. İç direnç büyüdükçe kaynağın çıkış voltajı
azalır.
Akım kaynakları.- Sabit bir çıkış akımı verebilen üretece denir. İdeal bir akım kaynağı da mevcut değildir.
THEVENIN TEOREMİ
Bu teorem doğrusal bir ağ üzerindeki herhangi iki bağlantı noktası arasındaki elemanlar, bu iki nokta
arasındaki potansiyel farka eşit bir elektromotor kuvvete sahip bir üreteç ile değiştirilebilir; ancak, üreteç bu
iki noktaya göre dışta kalan dirençle seri olmalıdır der. Eğer, şekil 1 (a) daki gibi bir devreyi düşünecek
olursak Thevenin’nin eşdeğer devresi şekil 1 (b) deki devre olacaktır.
(a) Mevcut devre
(b) Eşdeğer devre
41
Şekil 1
Şekilde:
Req : A ve B noktaları arasında (R dış direnci hariç) devrenin eşdeğer direncidir. Şöyle ki, voltaj kaynakları
birbirleri ile kısa devre bağlanmış ve akım kaynakları açık devre içinde bırakılmış olsun.
Veq : Devre açıkken A ve B noktaları arasındaki (basitleştirilmiş devrenin) voltajdır.
NORTON TEOREMİ
Erişilebilen A ve B gibi iki terminali bulunan her devre bir Ieq akım kaynağı ile paralel olan bir Req eşdeğer
direnci ile değiştirilebilir. Ieq ve Req şöyle tanımlanabilir:
Req : A ve B noktaları arasında (R dış direnci hariç) devrenin eşdeğer direncidir. Şöyle ki, voltaj kaynakları
birbirleri ile kısa devre bağlanmış ve akım kaynakları açık devrede bırakılmış olsun. R eq aynen Thevenin
eşdeğer direnci gibi hesaplanır.
Ieq : Birincil devre kısa devre halindeyken A ve B noktaları arasında dolaşan akım şiddetidir.
Şekil 2 (a)
Şekil 2 (a) ya tekrar bakacak olursak bunun Norton eşdeğeri şöyle olacaktır:
Bir “R” direnci ile seri bağlı bir “V” voltaj kaynağı “R” direnci ile paralel bir I =V/R akım kaynağına
eşdeğerdir.
Şekil 3
A ve B terminal noktalarından bakılan Thevenin devresi (a) Norton devresine (b) eşittir. Bakınız şekil 3.
42
Thevenin ve Norton Eşdeğer Devrelerinin Teorik Olarak Hesaplanması
Bu bölümdekileri daha iyi anlayabilmek için aşağıdaki devre çözümünü yapacağız. Aşağıdaki şekil 4’de
görülen devrenin Thevenin ve Norton eşdeğerlerini bulun.
Şekil 4
Şekil 5
Thevenin voltajı
Eşdeğer direnç
(a)
(b)
Thevenin devresi
(c)
(a) Bu göz (mesh) içinde dolaşan akım 0,4 amperdir. Bundan dolayı A ve B noktaları arasında görülecek
voltaj 6 volttur.
I
Veq. = 0,4 x 15 = 6 V
10
0,4 A
10 15
(b) Thevenin eşdeğer direnci şekil 5(b) de görüldüğü gibi kaynaklar kısa devre yapılarak hesaplanır.
Buradaki iki direnç paralel olduklarından eşdeğer direnç 6 olacaktır.
Reş
10 * 15
6
10 15
(c) Bu, şekil 5’deki şemadaki devrenin A ve B noktalarından görünen Thevenin eşdeğeridir. Norton eşdeğer
devresi Thevenin eşdeğer devresinden aşağıda gösterildiği gibi kolayca hesaplanabilir.
I eş
6
1A
6
43
Şekil 6
Şekil 7
ÖN ÇALIŞMA ÖDEVİ
1.
R1=5.6K
V1=12V
R3=1.5K
R2=750
Ry=750
Yandaki devrenin Thevenin eşdeğer devre modelini
çiziniz. Thevenin gerilimi ve direncini bulunuz.
2.
Yandaki devrenin Thevenin eşdeğer devresini çözümleyiniz
maksimum güç transferi için R direncinin değerini bularak
maksimum gücü bulunuz.
3.
R1 10 K , R2 10 K , R3 10 K , R4 10 K , R5 60 K , V1 10V , V2 5V
Yandaki devrede a ve b noktaları arasındaki Thevenin ve Norton eşdeğer devre modellerini çiziniz.
Thevenin gerilimi ile Norton akımını bulunuz.
4. Yukarıda verilen adımlardaki devrelerin benzetimini ve ilgili sonuçlarını seçeceğiniz bir simülasyon
programında gerçekleyiniz.
44
DENEYSEL ÇALIŞMA
1)
a) Ön çalışma sorularındaki ilk devreyi kurunuz. Ry direnci üzerine düşen gerilimi ve Ry üzerinden
geçen akımı ölçüp not ediniz.
b) Devrenin Thevenin eşdeğerini bulmak için Ry direncini yerinden çıkarıp Thevenin gerilimini
ölçünüz.
c) V1 gerilim kaynağını devreden çözüp yerine kısa devre elemanı bağlayınız. Thevenin direncini
ölçünüz.
d) Thevenin eşdeğer devresini çizip gerilim ve direnç değerlerini yazınız.
e) Thevenin eşdeğer devresini kurunuz Kurduğunuz devreye aynı yük direncini (Ry) bağlayınız. Ry
direnci içinden geçen akımı ve üzerine düşen gerilimi not ediniz.
f) Madde 1’de ölçülen değerle madde 5’deki değerleri karşılaştırınız. Aynı mı? Bu durumda Thevenin
Teoremi sağlanmış mıdır? Kısaca açıklayınız.
2)
a) Şekil 1’deki devrenin Norton eşdeğerini bulmak için Ry direncini çıkarıp yerine kısa devre elemanı
bağlayınız. Ry direnci yerine bağlanan kısa devre elemanı üzerinden geçen akımı ölçüp not ediniz.
Ölçtüğünüz bu akım Norton Akımı mıdır?
b) Devrenin eşdeğer direncini daha önceki bölümde ölçmüş idiniz.
3)
a) Norton akımını ve eşdeğer direnci ölçtüğünüze göre Şekil 1’deki devrenin Norton eşdeğer devresini
çizip değerleri belirtiniz.
b) Önceki bölümde Thevenin eşdeğer devresini kurmuş idiniz. Bu bölümde Norton eşdeğer devresini
kolaylıkla kurabilir misiniz? Niçin?
RAPORDA İSTENENLER
1. Deneyin yapılış amacını birkaç cümleyle açıklayınız.
2. Deneyde kullanılan devrenin teorik çözümlerini, simülasyon ve deneyde ulaşılan ölçüm sonuçlarını
karşılaştırınız. Farklılıklar var ise sebeplerini açıklayınız.
3. Deneyin 1. adımında Thevenin teoreminin sağlanıp sağlanmadığını kısaca açıklayınız. Thevenin
Eşdeğer devresini çiziniz.
4. Deneyin 2. adımında ölçtüğünüz değerlere göre şekil 1’deki devrenin norton eşdeğerini çiziniz.
5. Ulaşılan sonuçlar dikkate alınarak deneyle ilgili yorum, görüş ve kazanımlarınızı yazınız.
45
DENEY NO 6: SÜPERPOZİSYON TEOREMİ
Bu deneyde Süperpozisyon teoremi açıklanarak pratik olarak gerçekleştirilecektir.
I- - KURAMSAL AÇIKLAMALAR
Süperpozisyon teoremi birden fazla kaynak bulunan doğrusal devrelere uygulanabilir. Bu teorem çok
kaynaklı karmaşık devrelerin analizini kolaylaştırır. Birden fazla bağımsız kaynak içeren doğrusal devrede,
her bir kaynağın devre elemanı üzerinde oluşturduğu akım ya da gerilimin cebirsel toplamı alınır. Cebirsel
toplam alınırken akımın yönüne dikkat edilir. Bu akım yada gerilimi hesaplarken devrede tek bir kaynak
bırakılıp diğerleri devreden çıkarılır. Yani gerilim kaynağı kısa devre, akım kaynağı ise açık devre yapılır.
Eleman üzerindeki akım ya da gerilim değeri, bilinen devre çözüm yöntemlerinden biri kullanılarak bulunur.
Aynı işlemler sırasıyla diğer kaynaklar için tekrarlanır.
Teoremin daha iyi anlaşılması için bir örnekle açıklayalım.
Şekil1a’da görülen iki kaynaklı doğrusal devrede R2 direncinin
harcadığı gücü Süperpozisyon teoremi yardımıyla bulalım.
Bunun için sırayla kaynakları sıfırlayalım.
Şekil.1a
Önce Vdc gerilim kaynağı devredeyken, Idc akım kaynağını açık
devre yapalım. R2 direnci üzerinden geçen akım
VR2
I R2
’dir.
R1 R 2
Şekil. 1b
Şimdi Idc akım kaynağını devrede bırakıp Vdc gerilim kaynağını
kısa devre yapalım. R2 direnci üzerinden geçen akım
R1
I R2
Idc olur.
R1 R 2
Şekil. 1c
Hesaplanan akım değerlerinin cebirsel toplamı alınır. (Akım yönlerinin aynı olduğuna dikkat edin.)
I T OPLAM
VR2
R1
I dc olarak ifade edilir.
R1 R 2 R1 R 2
46
2
Güç ise PR I TOPLAM
.R 2 ’dir.
Vdc=8V, Idc=4mA, R1=2K ve R2=6K olsun. R2 direncinin harcadığı gücü hesaplayalım.
I T OPLAM
VR2
R1
8
2.10 3
I dc
4.10 -3 2mA
R1 R 2 R1 R 2
2.10 3 6.10 3 2.10 3 6.10 3
2
PR I TOPLAM
.R 2 (2.10 -3 ) 2 .6.10 3 24mW
II- ÖN HAZIRLIK
1. Aşağıdaki devrede 2Ω’luk direnç üzerindeki akımı Süperpozisyon teoremini kullanarak bulunuz.
Şekil. 2
2. 560Ω’luk direnç üzerinden geçen akımı Süperpozisyon teoremini kullanarak bulunuz.
Şekil. 3
47
Şekil. 4
3. Yukarıda verilen adımlardaki şekil 2,3 ve 4 devrelerinin benzetimini ve ilgili sonuçlarını seçeceğiniz bir
simülasyon programında gerçekleyiniz. Çıktısını ekleyiniz.
III-DENEYİN YAPILIŞI
1. Şekil. 4’te görülen devrede 560Ω’luk direnç üzerindeki akım Süperpozisyon teoremi ile bulunacaktır.
Devreyi board üzerine kurunuz. V1 ve V2 kaynaklarını istenen değerlere ayarlayıp devreye bağlayınız.
a. 560Ω’luk direnç üzerinden geçen ITOPLAM akımını ölçüp kaydediniz. Akım yönüne dikkate ediniz.
ITOPLAM=………….
b. V1 kaynağı devredeyken, V2 kaynağını devreden çıkarıp, devrede c ve d noktalarını kısa devre
yapınız . 560Ω’luk direnç üzerinden geçen I1 akımını ölçüp kaydediniz.
I1=…………….
c. V2 kaynağı devredeyken, V1 kaynağını devreden çıkarıp, devrede a ve b noktalarını kısa devre
yapınız . 560Ω’luk direnç üzerinden geçen I2 akımını ölçüp kaydediniz.
I2=…………….
Ölçtüğünüz I1 ve I2 akımlarını cebirsel olarak toplayınız. ITOPLAM= I1+ I2 olup olmadığını belirtiniz. Değil ise
nedenini açıklayınız.
2. Şekil. 3’te görülen devrede 560Ω’luk direnç üzerindeki akım Süperpozisyon teoremi ile bulunacaktır.
Devreyi board üzerine kurunuz. V ve I kaynaklarını istenen değerlere ayarlayıp devreye bağlayınız.
a. 560Ω’luk direnç üzerinden geçen ITOPLAM akımını ölçüp kaydediniz. Akım yönüne dikkate ediniz.
ITOPLAM=………….
b. I kaynağı devredeyken, V kaynağını devreden çıkarıp, devrede c ve d noktalarını kısa devre yapınız.
560Ω’luk direnç üzerinden geçen I1 akımını ölçüp kaydediniz.
NOT: AKIM KAYNAĞINI 1mA OLACAK ŞEKİLDE YENİDEN AYARLAYINIZ.
48
I1=…………….
c. V kaynağı devredeyken, I kaynağını devreden çıkarıp, devrede a ve b noktalarını açık devre olarak
bırakınız . 560Ω’luk direnç üzerinden geçen akımını I2ölçüp kaydediniz.
I2=…………….
Ölçtüğünüz I1 ve I2 akımlarını cebirsel olarak toplayınız. ITOPLAM= I1+ I2 olup olmadığını belirtiniz. Değil ise
nedenini açıklayınız.
V- RAPORDA İSTENENLER
1. Deneyde kullanılan devrelerin teorik çözümlerini yapıp ölçüm sonuçları ile karşılaştırınız. Farklılıklar
varsa sebeplerini açıklayınız.
2. Ölçüm sonuçlarını rapora ekleyiniz.
3. Doğrusal devre ne demektir? Araştırınız.
49
DENEY NO 7: OSİLOSKOP KULLANARAK GENLİK VE SIKLIK ÖLÇÜMÜ
Amaç: Bu deneyde amaç, Elektrik-Elektronik Mühendisliği’nde en çok kullanılan ölçü aygıtlarından birisi
olan Osiloskop’un tanıtılması, osiloskop kullanarak çeşitli dalga biçimlerinin genlik, sıklık (frekans), dönem
(period) gibi özelliklerinin ölçülmesidir.
1. AÇIKLAYICI BİLGİLER:
1.1.
OSİLOSKOP YAPISI: Osiloskop, girişine uygulanan gerilimin zamanla değişimini
ekranında gösterebilen bir ölçü aygıtıdır. Yapısal ve işlevsel açıdan osiloskop 4 ana kattan oluşur.
Bunlar; Görüntü birimi, Yatay saptırma katı, Düşey saptırma kat(lar)ı ve Tetikleme
katı’dır.
Şekil-1: Osiloskop yapısında yer alan katlar ve ilişkileri
1.1.1. Görüntü Birimi: Yapısında bir Katot Işınlı Tüp (Cathode Ray Tube: CRT) yer alır. Katot
ışınlı tüpün ilkesek biçimi Şekil-2 (a)’da, ekranının ön görünüşü ise Şekil-2 (b)’de
verilmiştir.
Katot ışınlı tüpün katodu bir flaman yardımıyla ısıtılarak, atomik yapısında yer alan serbest
elektronların kolayca kopması sağlanır. Bu serbest elektronlar anota uygulanan yüksek (+)
potansiyelli gerilim yardımıyla anota (dolayısıyla ekrana) doğru büyük bir hızla çekilirler.
Yukarıdaki ilkesel yapıda gösterilmemiş olan ve yine katota göre (+) potansiyele sahip olan
hızlandırma ve odaklama ızgaraları yardımıyla elektronlar anotta yer alan ekran yüzeyinin tam
orta noktasına gönderilir. Ekranın iç yüzeyine kaplanmış olan fluoresans madde, üzerine
elektronlar çarptığında ışıma yapar ve ekranı izleyen kişi tarafından parlak bir nokta olarak
görülür.
Şekil-2: Katot ışınlı tüpün ilkesel yapısı ve ekranının ön görünüşü
1.1.2. Yatay Saptırma: Düşey ve yatay saptırma levhalarının işlevleri, her bir çiftin kendilerine
uygulanan farklı elektriksel potansiyeller sonucu aralarında oluşacak olan elektrik alanı
yardımıyla, tam ortalarından geçen elektronları uygun yönde ve uygun oranda saptırarak
ekranda belirli bir noktaya yönlendirmektir. Her iki levha çiftine de herhangi bir gerilim
uygulanmadığında, elektron beneği ekranın tam ortasında görülecektir. Şekil-3’te, düşey
ve yatay saptırma levha çiftlerinin birine ya da her ikisine ve farklı yönlerde zamanla
değişmeyen gerilimler uygulandığında, ekranda görülecek olan görüntüler verilmiştir.
Düşey saptırma levhalarına herhangi bir gerilim uygulanmadığını, sadece yatay saptırma
levhalarına gerilim uygulandığını düşünelim. Örneğin, ekrana önden bakıldığında sağda
yer alan levhaya, soldakine göre daha (+) olacak biçimde sabit (zamanla değişmeyen) bir
gerilim uygulandığında, oluşacak elektrik alanı, elektron beneğini ekranın tam ortasına
değil, biraz daha sağa doğru yönlendirir (Şekil-3 (a)). Belirtilen yönde, yatay saptırma
levhaları arasına uygulanan gerilimin şiddeti arttırıldığında sapma oranı da aynı yönde ve
biraz daha fazla olacaktır.
Yatay saptırma levhalarına gerilim uygulanmayıp, sadece düşey saptırma levhalarına
gerilim uygulanırsa, uygulanan gerilimin yönüne ve şiddetine bağlı olarak elektron beneği
düşey doğrultuda yer değiştirir (Şekil-3 (b)).
50
Eğer her iki levha çiftine de gerilim uygulanırsa, yine yön ve şiddetlerine bağlı olarak,
elektron beneği ekran düzleminde farklı bir yer alır (Şekil-3 (c)).
Şekil-3: Düşey ve yatay saptırma levhalarına uygulanan gerilimlerin elektron beneğini
saptırması
Eğer düşey saptırma levhalarına herhangi bir gerilim uygulanmamışken, yatay saptırma
levhalarına zamanla değişimi Şekil-4 (a)’da verilen testere dişi (rampa) biçimli bir gerilim
uygulanırsa, levhalar arasındaki gerilim her an farklı olacağından, katottan fırlayarak
ekrana doğru ilerleyen ve birbirini izleyen elektronları etkileyen elektrik alanı da zaman
içinde farklı olacaktır. Bu durum, farklı anlarda ekrana ulaşan elektronların farklı
noktalara çarpmalarına neden olur. Eğer uygulanan gerilimin zamanla değişim hızı
(sıklığı) çok küçük ise, bu durum ekranda yatay yönde ilerleyen bir nokta olarak gözlenir
(Şekil-4 (b)). Ancak işaretin sıklığı (frekansı) gözün izleyebileceğinden daha hızlı ise,
ekrana ulaşan elektronlar ekranda yatay bir çizgi olarak görülür (Şekil-4 (c)). Yatay
saptırmaya uygulanan testere dişi gerilimin sıklığı, Tarama Frekansı ya da Tarama Hızı
olarak da anılır. Tarama frekansı değiştirilerek ekrandaki görüntünün daha geniş ya da
daha dar bir yatay uzunluk kaplaması sağlanabilir.
Şekil-4: Yatay saptırmaya uygulanan testere dişi gerilimin sıklığının ekrandaki görüntüye
etkisi
1.1.3. Düşey Saptırma: Düşey saptırma katı, ölçülmek ya da incelenmek istenen işaretin
osiloskoba uygulandığı giriş katıdır. Her osiloskopta en az bir adet düşey saptırma katı
yer alır. Uygulamada en yaygın olarak iki girişli aygıtlar kullanılmakla birlikte, özel
amaçlı çok girişli osiloskoplar da vardır. Yatay saptırma katındakine benzer biçimde,
sadece düşey saptırma levhalarına uygulanacak gerilimler ekrana oluşan elektron
beneğinin düşey yöne sapmasını sağlar.
Osiloskobun girişine (düşey saptırma katına) sinüs biçimli, yatay saptırma katına da sinüs
ile aynı frekansta bir testere dişi gerilimin uygulandığını var sayalım. Elektron beneği
yatay saptırmaya uygulanan işaretin hızına bağlı olarak ekranın sol yanından sağa doğru
sabit bir hızla ilerlerken, aynı anda düşey saptırma levhalarına uygulanan gerilimin anlık
değerlerine bağlı olarak yukarıya ya da aşağıya doğru sapma gösterir. Bu durumda
ekranda girişe uygulanan gerilimin zamanla değişimi yatayda tüm ekranı kaplayacak
biçimde görülür (Şekil-5)
Şekil-5: Osiloskop ekranında oluşan görüntü
Giriş işaretinin sıklığı ile tarama hızı birbirine eşit değilse, ekranda giriş işaretinin sadece
tam bir dönemi (periyodu) görülmez. Eğer ekranda giriş işaretinin birkaç döneminin
görülmesi isteniyorsa, tarama hızı kademeli olarak azaltılır. Böylece, yatay tarama henüz
bir kez tamamlanmadan, yani elektron beneği henüz ekranın sağ yanına ulaşmadan, ona
göre daha hızlı olan giriş işareti bir periyottan daha fazla ilerler ve ekranda izlenebilir.
Tersine, tarama hızı artırılarak, ekranda giriş işaretinin bir periyottan daha az bir bölümü
de incelenebilir.
1.1.4. Tetikleme Birimi: Osiloskop ekranında elde edilen görüntünün sürekli aynı kalabilmesi
için, her tarama işaretinin başlangıç noktasında girişe uygulanan gerilimin belirli bir anlık
değerde olması gerekir. Aksi durumda her taramada giriş işareti farklı bir anlık değerden
başlayacağından, ekranda durağan değil, kayan bir görüntü elde edilir. İşte tetikleme
biriminin işlevi, giriş işaretinden örnekler alarak, her tarama başlangıcında yatay saptırma
51
levhalarına uygulanan testere dişi biçimli işaretin en küçük değerinden başlatılmasını
sağlamaktır.
OSİLOSKOP ÖN PANELİNDE YER ALAN BAZI DÜĞME VE ANAHTARLARIN
İŞLEVLERİ:
1.2.
1.2.1. Görüntü Katı: Görüntü katıyla ilgili denetim işlevleri aşağıdaki düğme ve anahtarlar
yardımıyla gerçekleştirilir:
Power: Osiloskobun açma/kapama işlevini yerine getirir.
Inten: Ekrandaki görüntünün parlaklığını ayarlar.
Focus: Ekrandaki görüntünün netliğini ayarlar.
Illum: Ekranın dış yüzeyini aydınlatır.
Trace Rotation: Bir tornavida kullanılarak, yatay eksenin yere parallel olması ayarını
gerçekleştirir.
1.2.2. Yatay Saptırma Katı: Yatay saptırma ile ilgili olarak aşağıda ad ve işlevleri sıralanan
anahtar ve düğmeler kullanılır:
TIME/DIV: Bu çok konumlu seçici anahtar, yatay saptırma uygulanan tarama işaretinin
sıklığını kademeli olarak değiştirir. Anahtarın gösterdiği değer, elektron beneğinin yatay
eksende bir kare (Div) sapmasının karşılığıdır. Örneğin; Time/Div anahtarının 1 ms
önünde olması, elektron beneğinin yatay ekseninde 1 Div (1 cm) uzunluğundaki
ilerlemesinin 1 ms sürdüğünü gösterir. Bazı özel uygulamalarda, yatay tarama için
osiloskop içinde üretilen testere dişi biçimli gerilim yerine dışarıdan bir başka işaret
kullanılması gerekebilir. Bu durumda Time/Div çok konumlu seçici anahtar son konumu
olan Ext. Hor. (External Horizontal: Dışarıdan Yatay) ya da X-Y konumuna getirilir. Bu
durumda, yatay saptırmaya uygulanmak istenen işaret CH1(X) girişine, düşey saptırmaya
uygulanmak istenen işaret ise CH2(Y) girişine uygulanır.
Variable: Bu potansiyometrenin işlevi, yatay saptırma katına uygulanan tarama işaretinin
hızını (tarama sıklığını) sürekli ayarlayabilmektir. Bu potansiyometrenin de saat ibresi
yönündeki son ayar noktası duyarlı bir anahtar konumundadır ve bu konum Cal’d
(Calibrated: ölçeklenmiş) olarak adlandırılmıştır. Eğer ekrandan yatay sapma (dönem:
period) ile ilgili ölçüm alınacaksa, VAR düğmesi mutlaka Cal’d konumunda olmalıdır.
VAR düğmesi dışarıya doğru çekildiğinde, yatay tarama hızı 10 kat küçültülür. Bu
durumda ekrandaki görüntünün düşey uzunluğu 10 kat büyütülmüş olur.
Position: Yatay saptırma levhalarına uygulanan gerilim üzerine (+) ya da (-) işaretli bir
DC gerilim eklenerek, ekrandaki görüntünün tümüyle sağa ya da sola doğru kaydırılması
sağlanır.
1.2.3. Düşey Saptırma Katı: Düşey saptırma (Giriş) katına ilişkin ayarlamalarda aşağıdaki
düğme ve anahtarlar kullanılır.
Çok kanallı (girişli)
osiloskoplarda (CH1, CH2), her giriş için aşağıdaki düğme ve anahtarlar ayrı ayrı
bulunmalıdır.
AC/Gnd/DC: Bu üç konumlu seçici anahtar, o girişe uygulanan işaretin ekrana gönderiliş
biçimini belirler. Gnd konumunda, girişe uygulanan işaret düşey saptırma levhalarından
ayrılır ve levhaların her ikisi de toprak potansiyeline getirilir. Böylelikle girişte bir işaret
olmasına karşın, ekrana sıfır değerinde bir işaret gönderilerek inceleme öncesi
görüntünün ekranda alması istenen konum ayarlanabilir. DC konumunda, girişe
52
uygulanan işaret hiçbir işleme uğramadan (varsa AC ve DC bileşenleri ile birlikte) ekrana
gönderilir. AC konumunda ise, giriş işaretinin ortalama değer (DC) bileşeni süzülerek
ekrana sadece değişken (AC) bileşeni gönderilir.
VOLTS/DIV: Bu çok konumlu seçici anahtar, düşey saptırma katında yer alan
kuvvetlendiricinin kazancını kademeli olarak değiştirir. Anahtarların gösterdiği değer,
elektron beneğinin düşey eksende bir kare (Div) sapmasının gerilimsel karşılığıdır.
Örneğin; Volts/div anahtarının 1 Volt önünde olması, ekranın düşey ekseninde 1 Div (1
cm) uzunluğundaki sapmasının 1 Volt gerilime karşılık olduğunu gösterir. Bu seçici
anahtarın merkezinde kademesiz (sürekli) ayarlanabilen ve üzerinde VAR yazan
potansiyometre ise, giriş katındaki kuvvetlendiricinin kazancını sürekli ayarlayabilmek
olanağını verir. Bu potansiyometrenin saat ibresi yönündeki son ayar noktası duyarlı bir
anahtar konumundadır ve bu konum Cal’d (calibrated: ölçeklenmiş) olarak
adlandırılmıştır. Bu düğmenin işlevi, üzerinden ölçüm yapmamak koşulu ile, görüntünün
daha ayrıntılı izlenecek biçimde ekranda görünmesini sağlamaktır. Eğer ekrandan düşey
sapma(genlik) ile ilgili ölçüm alınacaksa, VAR düğmesi mutlaka Cal’d konumunda
olmalıdır. VAR düğmesi dışarıya doğru çekildiğinde, o girişe ilişkin yükseltecin kazancı
5 katına çıkarılabilir. Bu durumda ekrandaki görüntünün düşey büyüklüğü de 5 kat
büyütülmüş olur.
Position: İlgili girişe uygulanan gerilim üzerine (+) ya da (-) işaretli bir DC gerilim
eklenerek, ekrandaki o girişe ilişkin görüntünün tümüyle yukarıya ya da aşağıya doğru
kaydırılması sağlanır.
i.
Tetikleme Birimi: Tetikleme birimi ve Tarama Modu ile ilgili olarak aşağıda ad ve
işlevleri sıralanan anahtar ve düğmeler kullanılır:
Level: Ekranda görülmek istenen görüntünün, ekranın sol yanında, girişe
uygulanan işaretin hangi anlık değerinden başlaması gerektiğini ayarlar. Giriş
işareti ile tarama işaretinin eşzamanlılığının (senkronizasyonunun) olmaması,
ekrandaki görüntünün durağan olmamasına, yani ekranda kayan bir görüntü
olmasına neden olur.
Source: Bu üç konumlu seçici anahtar ile, tetikleme işaretinin içeriden mi (Int.),
dışarıdan mı (Ext) yoksa şebeke geriliminden mi (Line) alınacağı belirtilir.
Int. Trig. (Internal Trigger: İçeriden Tetikleme): Birden çok giriş işaretinin
izlenmesi durumunda, tetikleme işaretinin hangi girişten üretilmesi gerektiğinin
seçimini yapar.
Ext. Trig. (External Trigger: Dışarıdan Tetikleme): Eğer tetikleme için
dışarıdan ve ayrı bir işaret kullanılması gerekirse, bu bağlantı girişi
kullanılmalıdır.
Slope: Tetikleme işaretinin eğiminin seçimi için kullanılır.
Vert Mode (Vertical Mode: Düşey Çalışma Modu): 5 ayrı tuştan birinin
basılmasıyla, düşey moda ekranda görülmesi istenen işaret belirlenir:
Ch1: Ekranda sadece 1. girişe uygulanan işaretin izlenmesini sağlar.
Ch2: Ekranda sadece 2. girişe uygulanan işaretin izlenmesini sağlar.
Alt: Ekranda her iki girişe uygulanan işaretlerin sıra ile taranarak birlikte
izlenmesini sağlar.
53
Chop: Ekranda her iki girişe uygulanan işaretlerin birlikte taranarak birlikte
izlenmesini sağlar.
Add: Ekranda 1. ve 2. girişe uygulanan işaretlerin toplamının bir işaret olarak
izlenmesini sağlar.
b.
ÇEŞİTLİ DALGA BİÇİMLERİ:
Bilindiği gibi pil, akümülatör,… vb. gerilim kaynaklarının ürettikleri gerilim ve akımlar (DC)
zamanla değişim göstermeyen büyüklüklerdir. DC ölçen Voltmetre veya Ampermetreler
kullanılarak kolaylıkla ölçülebilirler. Oysa Sinüs, Kare, Üçgen,… vb. dalga biçimleri zamana
bağlı olarak değişirler. Bu tür dalga biçimleri için, DC işaretlerden farklı olarak Ani Değer,
Tepe Değer, Tepeden Tepeye Değer, Ortalama Değer ve Etkin Değer gibi tanımlamalar
yapılır. Sinüs, Kare ve Üçgen biçimli gerilimlerin etkin değerleri ile tepe değerleri arasındaki
doğrusal ilişki aşağıdaki çizelgede verilmiştir.
Dalga Biçimi
Tepe Değer
VT (V)
Tepeden Tepeye Değer
VTT (V)
Etkin Değer
Vet
Sinüs
A
2A
A/√2
Kare
A
2A
A
Üçgen
A
2A
A/√3
Bu değerlerden bazıları (ortalama ve etkin değer gibi) uygun ölçü aletleri kullanılarak
ölçülebilir ancak bu ölçü aletleri bize ölçülen gerilim ya da akım biçimi, tepe değeri, tepeden
tepeye değeri veya ani değeri hakkında bir bilgi veremez. Bütün bunların dışında, değişken
bir gerilimin Sıklık (Frekans) ya da Dönem (Periyot) ‘inin bir ampermetre veya voltmetre
ile ölçülmesi olanaksızdır.
İşte Osiloskop kullanımı böyle durumlarda avantaj sağlamaktadır. Osiloskoplar gerilim ölçen
aygıtlardır. Yani devredeki her hangi iki düğüm arasına (tıpkı voltmetre gibi) paralel
bağlanırlar ve o iki nokta arasındaki gerilimin biçimini ekranlarına yansıtırlar. Osiloskop
üzerinde yer alan kademeli seçici anahtarların (komütatörlerin) kademe değerleri ve
ölçeklendirilmiş ekrandaki dalga biçimi değerlendirilerek, daha önce söz edilen
büyüklüklerin ölçülmesi sağlanır.
Osiloskop ekranının yatay ekseni (X ekseni) zamanı, düşey ekseni (Y ekseni) ise gerilimi
göstermektedir. Osiloskobun yatay tarama hızını gösteren TIME/DIV kademeli anahtarının
gösterdiği değer; yatay eksende bir kare uzunluğun (div) karşılık geldiği zamanı gösterir.
Osiloskoplarda çoğunlukla ekranda aynı anda iki gerilimi birlikte görebilmeyi sağlamak
amacıyla iki adet giriş ve iki adet düşey saptırma katı (iki adet Y kanalı) yer alır. Böyle
durumlarda her iki işaretin yatay saptırmaları (Time/Div) birlikte değişmesine karşın her
ikisinin düşey saptırmaları ayrı ayrı değiştirilebilir. Yatay saptırmadakine benzer biçimde,
düşey saptırmaya ait VOLT/DIV kademeli anahtarlarla seçilen değerler, o kanaldaki gerilim
için, ekrandaki 1 birimlik (1 Div) uzunluğun kaç Volt değerine karşılık geldiğini gösterir.
Örneğin; 1. kanalın Volt/Div komütatörü 1 V, 2. kanalın Volt/Div komütatörü 5 V değerini
gösteriyorsa, ekrandaki düşey doğrultudaki (Y ekseni) 1 Div (1 cm) uzunluğun, 1. kanaldaki
işaret için 1 Volt, 2. kanaldaki işaret için ise 5 Volt’a karşılık geldiğini belirtmektedir.
54
2. ÖN HAZIRLIK
1. V/div ve T/div anahtarları nedir ve ne işe yararlar?
2. Aşağıdaki işaret için;
a. V/div=5V/div, T/div=2ms/div iken osiloskop ekranında görülmektedir. Bu işaretin max gerilimini,
frekansını, efektif( etkin) ve ortalama gerilim değerlerini bulunuz.
b. V/div=400mV/div, T/div=400 us/div iken osiloskop ekranında görülmektedir. Bu işaretin max
gerilimini, frekansını, efektif( etkin) ve ortalama gerilim değerlerini bulunuz.
Şekil 2
3.
Vi(t)=10sin4000πt olduğuna göre Vo(t) işaretini hesaplayınız. Bu işaretin max gerilimi, efektif ve
ortalama gerilim değerleri nelerdir?
Şekil 3
4. Şekil 3’teki devrede Vi(t) kaynağını sırasıyla 10sin4000πt değerinde sinüs, kare ve üçgen dalga
üreteci olarak seçerek simülasyon programı ile gerçekleyiniz.
3. DENEYİN YAPILIŞI:
1. Zamanla Değişmeyen (DC) Gerilimlerde Genlik Ölçülmesi
i.
ii.
iii.
iv.
v.
Sayısal Voltmetreyi DC kaynağın çıkışına paralel bağlayarak, kaynak çıkışının 1 Volt
olmasını sağlayınız.
Osiloskopun 1. kanalını GND konumuna getirerek ekrandaki görüntüyü (yatay düz çizgi)
ekranın en altındaki ölçü çizgisi ile çakıştırınız.
Osiloskopun 1. kanalının girişini DC güç kaynağının çıkışına bağlayınız.
1. kanalın Volt/Div anahtarını 0.2 Volt/Div kademesine getiriniz ve kanal girişini DC
konumuna alınız.
Ekranda görülen görüntünün düşey yönde sapma miktarını (Div) ölçünüz. Bu değeri Volt/Div
kademesinin gösterdiği değerle çarparak DC gerilin değerini hesaplayınız.
55
Aşağıda verilen Tablo-1’i kullanarak, aynı işlemi 2.5 V, 4.5 V ve 8.3 V için tekrarlayınız.
vi.
Sayısal Voltmetre
Volt/Div Kademesi
Görüntünün Sapması
Osiloskop Ölçümü
1.0 V
0.2
5.0
1.0 V
2.5 V
4.5 V
8.3 V
Tablo-1
2. Zamanla Değişen (AC) Gerilimlerde Genlik Ölçülmesi
Fonksiyon üretecini Sinüs biçimine ve frekansını (yaklaşık) 1 kHz’e ayarlayınız. 1. kanal
girişi GND konumunda iken görüntüyü ekranın ortasındaki yatay ölçek çizgisi ile çakıştırınız
ve fonksiyon üretecinin çıkışını osiloskopun 1. kanal girişine bağlayınız.
Osiloskopun 1. kanal düşey saptırmasını 0.5 Volt/Div konumuna getiriniz.
Ekranda görülen Sinüs biçimli işaretin tepeden tepeye değerini 6 birim (Div) olacak şekilde,
fonksiyon üretecin çıkış genliğini ayarlayınız. Bu durumda ölçülen gerilimin değeri, VTT=0.5
Volt/Div*6 Div = 3 Volt olacaktır. Bu değeri kullanarak aynı gerilimin Tepe Değerini (V T)
ve Etkin Değerini (Vet) hesaplayarak Tablo-2’ye yerleştiriniz.
Fonksiyon üretecin çıkışına sayısal voltmetreyi bağlayarak, gerilimin etkin değerini ölçünüz
ve osiloskop kullanarak ölçülen değer ile karşılaştırınız.
Farklı değerli sinüsler, kare ve üçgen dalgalar için yukarıdaki işlemleri tekrarlayarak Tablo
2’yi doldurunuz.
i.
ii.
iii.
iv.
v.
Volt/Div
Sapma Kare VTT (V)
Sayısı (Div)
3
SİNÜS
KARE
ÜÇGEN
5
6
3
5
6
3
5
6
Tablo-2
56
VT (V)
VTet (V)
Sayısal Voltmetre (V)
3. Zamanla Değişen (AC) Gerilimlerde Dönem (Periyot) ve Sıklık (Frekans) Ölçülmesi
i.
ii.
iii.
iv.
v.
vi.
vii.
Fonksiyon üretecini sinüs biçimli ve VTT=3 V olacak biçimde ayarlayınız.
Frekans sayıcı (Frekansmetre) yardımıyla çıkış frekansını 100 Hz değerine ayarlayınız ve
osiloskopun 1. kanalına uygulayınız.
Time/Div kademeli anahtarını uygun bir konuma getirerek, ekranda bir periyodun tam olarak
görünmesini sağlayınız.
Bu durumda bir periyodun yatay eksende kaç kare (Div) uzunluğunda olduğunu belirleyerek
işaretin periyodunu hesaplayınız.
f= 1/T bağlantısından yararlanarak frekansı hesaplayınız ve bu değerleri Tablo-3’te yerine
yazınız.
Farklı frekanslar için (1.5 kHz, 4.8 kHz, 12 kHz, 25 kHz) aynı işlemleri tekrarlayarak Tablo3’ü doldurunuz.
Frekansmetrenin gösterdiği değerlerle, osiloskop kullanarak ölçtüğünüz frekans değerlerini
karşılaştırınız.
Frekansmetre (Hz)
100 Hz
1500 Hz
4800 Hz
12000 Hz
Time/Div
Kare Sayısı (Div)
Periyot (s)
Frekans (Hz)
Tablo-3
RAPORDA İSTENENLER:
1. Her üç ölçümde elde edilen sonuçların tablolarını ekleyiniz.
2. Bir osiloskop ekranında zamanla değişen, periyodik bir işaretin tepeden tepeye değeri 3.4 birim
(Div) ve osiloskopun ilgili kanalının Volt/Div komütatörü 5 kademesine ayarlı ise; Sinüs, Kare
ve Üçgen biçimli (aynı VTT değerine sahip) işaretler için VT ve VTet değerlerini ayrı ayrı
hesaplayınız.
3. 10 kHz frekanslı bir sinüs dalgasının periyodunun osiloskop ekranında 10 birim (Div)
uzunluğunda yer alabilmesi için Time/Div kademesi kaç olmalıdır?
4. Time/Div ayarı 20 s/Div olan bir osiloskopun ekranında, periyodu 6.3 birim (Div) uzunluğunda
olan bir kare dalga yer almaktadır. Bu kare dalganın periyodunu ve frekansını hesaplayınız.
57
DENEY NO 8: RL ve RC DEVRELERİN AC ve DC ANALİZİ
Deneyde, RC ve RL devrelerinin DC veya AC kaynaklar bağlandığı zaman gösterdikleri davranışlar
incelenecektir. Bu devrelerin zaman düzleminde incelenmesi ve gerekli çözümlemelerin yapılması
amaçlanmaktadır.
I- KURAMSAL AÇIKLAMALAR
a- RC Devresi
Şekil 1’deki devrede;
e(t ) ic (t ).R Vc (t )
e(t ) R.C.
dVc (t ) Vc (t ) e(t )
dt
RC
RC
(1)
dVc(t )
Vc (t )
dt
(2)
DC Analiz : (2) denkleminde e(t) = E biçiminde sabit bir fonksiyon ise, denklemin çözümü;
dVc (t )
V (t )
E
c
dt
RC
RC
dVc (t )
dt
Vc (t ) RC ( E 1)
58
Vc(t ) e t / RC .Vc (0) E.(1 e t / RC )
(3)
(3) denkleminde Vc(0) = 0 olması durumunda, yani kapasite herhangi bir gerilim ile yüklenmemiş
olduğunda, kapasitenin dolma denklemi (4) elde edilir.
Vc (t ) E.(1 e t / RC )
(4)
(4) denklemine dayanarak, RC devresinden geçen akımın ve kapasite üzerinde oluşan gerilimin
değişimleri şekil 2‘de gösterilmiştir.
Şekil 2. RC Devresindeki akım ve gerilim değişimi grafikleri (dolma konumu)
(2) denkleminde e(t) = 0 kabul edildiğinde, yani devrede e(t) kaynağı çıkarılıp yeri kısa devre edildiğinde,
kapasitenin boşalma denklemi (5) elde edilir.
Vc (t ) e t / RC .Vc (0)
, Vc (0) E
Vc (t ) e t / RC .E
(5)
(4) denklemine dayanarak, RC devresinden geçen akımın ve kapasite üzerindeki gerilimin değişimi şekil
3‘de gösterilmiştir.
59
Şekil 3. RC Devresindeki akım ve gerilim değişimi grafikleri (boşalma konumu)
Şekil 2 ve Şekil 3’de gösterilen grafiklerde en yüksek değerin 0,3676 katına düşmesine veya yükselmesine
kadar geçen zamanı devrede R ve C çarpımı belirlemektedir. Bu zaman sabiti ile gösterilmektedir.
AC Analiz: Şekil 1’deki devreye, (1) denkleminde belirtilen e(t) kaynağı olarak Vm.cos wt biçiminde
zamanla değişen bir işaretin uygulandığını düşünelim. Bu durumda,
v s (t ) R.ic (t ) vc (t )
Vm . cos wt R.ic (t )
1
ic (t ).dt
C
(6)
e jx cos x j sin x Euler açılımını (6) denklemine uygularsak,
Vm . Re e jwt R.I m . Re e jwt
1
Re e jwt .dt
C
1
.I m .e jwt
Vm .e jwt R
jwC
1
Re Vm .e jwt Re R.I m .e jwt Re e jwt .dt
C
1
.I m
Vm R
jwC
Vm Z .I m
(7)
(7) denkleminde Z değeri RC devresinin empedansını, değeri ise devreye uygulanan gerilim ile devreden
akan akım arasındaki faz farkını ifade etmektedir.
1
Z R
jwC
2
2
tan 1
XC
1
tan 1
R
wCR
Şekil 4’de RC devresine uygulanan gerilim ile devreden geçen akım değişimleri gösterilmektedir.
Şekil 4. RC devresindeki gerilim ve akım değişimleri
60
b- RL Devresi
Şekil 5’deki devrede ;
e(t ) i L (t ).R V L (t )
e(t ) i L (t ).R L.
diL (t )
R
1
( ).i(t ) ( ).e(t )
dt
L
L
diL (t )
dt
(8)
(9)
Şekil 5. RL Devresi
DC Analiz : (9) denkleminde e(t) = E biçiminde sabit (basamak) fonksiyon ise, denklemin çözümü;
i L (t )
R
( ) t
e L .i
R
( ) t
E
L )
(
0
)
(
).(
1
e
L
R
(10)
(10) denkleminde, iL(0) = 0 olması durumunda, yani bobin herhangi bir akım ile yüklenmemiş olduğunda
bobinin dolma denklemi (11) elde edilir.
R
( )t
E
i L (t ) ( ).(1 e L )
R
(11)
(11) denkleminde e(t) = 0 kabul edildiğinde, yani devrede e(t) kaynağı çıkarılıp yeri kısa devre edildiğinde
bobinin boşalma denklemi (12) elde edilir.
i L (t )
R
( ) t
e L .i
L (0)
E
, i L (0)
R
i L (t )
61
R
( ) t E
e L .
R
(12)
(11) ve (12) denklemlerine dayanarak, RL devresinden geçen akımın ve bobin üzerinde oluşan gerilimin
değişimleri dolma ve boşalma konumları için şekil 2 ve şekil 3’e benzemektedir.
AC Analiz: Şekil 5’deki devreye, (8) denkleminde belirtilen e(t) kaynağı olarak Vm.cos wt biçiminde
zamanla değişen bir işaretin uygulandığını düşünelim. Bu durumda,
v s (t ) R.i L (t ) v L (t )
Vm . cos wt R.i L (t ) L.
diL (t )
dt
(13)
e jx cos x j sin x Euler açılımını (13) denklemine uygularsak,
Re Vm .e jwt Re R jwL.I m .e jwt
Vm R jwL .I m
Vm Z .I m
(14)
(14) denkleminde Z değeri RC devresinin empedansını, değeri ise devreye uygulanan gerilim ile devreden
akan akım arasındaki faz farkını ifade etmektedir.
Z R 2 wL 2
tan 1
XL
wL
tan 1
R
R
Şekil 6’de RL devresine uygulanan gerilim ile devreden geçen akım değişimleri gösterilmektedir.
Şekil 6. RL devresindeki gerilim ve akım değişimleri
62
II- ÖN HAZIRLIK
1. Şekil 7’deki devrede bulunan lamba her iki yöndeki akım geçişinde de yanmaktadır. Bu devrede lambanın
söndüğü bir durum oluşmakta mıdır ? Sebebini gerekli hesaplamaları yaparak (şarj-deşarj işlemi
hesaplamaları) açıklayınız.
Şekil. 7
2. Devreyi simülasyon ortamında gerçekleyiniz.
DENEYİN YAPILIŞI
1. Şekil 8-a ve Şekil 8-b’deki devrelerde avometre yardımı ile devreden geçen akımı ve eleman üzerindeki
gerilimi ölçerek kaydediniz.
Şekil. 8-a
Şekil. 8-b
2. a. Şekil 9-a‘da verilen devreyi kurunuz. Giriş işaretini osiloskobun CH1 kanalında 10K pot direnci
üzerindeki gerilimi osiloskobun CH2 kanalında aynı anda gözlemleyiniz. Osiloskopta, şekil 2 ve şekil 3‘de
63
gösterilen grafikleri gözlemleyene kadar 10K pot direncini ayarlayınız. Belirtilen koşul sağlandığı andaki
10K pot direncinin değerini ölçünüz.
b. Şekil 9-b‘de verilen devreyi kurunuz. Giriş işaretini osiloskobun CH1 kanalında 10K pot direnci
üzerindeki gerilimi osiloskobun CH2 kanalında aynı anda gözlemleyerek çiziniz.
Şekil. 9-a
Şekil. 9-b
3. a. Şekil 10-a‘da verilen devreyi kurunuz. Giriş işaretini osiloskobun CH1 kanalında 10K pot direnci
üzerindeki gerilimi osiloskobun CH2 kanalında aynı anda gözlemleyiniz. Osiloskopta şekil 2 ve şekil 3‘de
gösterilen grafikler gözlemlenene kadar 10K pot direncini ayarlayınız. Belirtilen koşul sağlandığı andaki
10K pot direncinin değerini ölçünüz.
b. Şekil 10-b‘de verilen devreyi kurunuz. Giriş işaretini osiloskobun CH1 kanalında 10K pot direnci
üzerindeki gerilimi osiloskobun CH2 kanalında aynı anda gözlemleyerek çiziniz.
Şekil. 10-a
Şekil. 10-b
64
RAPORDA İSTENİLENLER
1. 1. basamakta bulunan akım ve gerilim değerleri ile kapasitenin ve bobin değerini hesaplayınız.
2. 2. ve 3. basamakta, a grubunda ölçtüğünüz direnci teorik olarak da hesaplayıp bulduğunuz değer ile
karşılaştırınız.
3. 2. ve 3. basamakta, b grubunda gözlemlediğiniz işaretler arasındaki faz farkını bulup, teorik olarak
hesapladığınız değerler ile karşılaştırınız.
4. Simülasyon sonuçlarıyla teorik hesaplama ve ölçüm sonuçlarını karşılaştırınız. Farklılıklar var mı?
Varsa sebeplerini açıklayınız.
NOT: Deneyde ulaştığınız ölçüm sonuçlarını da ekleyiniz.
65