11. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU
Gazi Üniversitesi, Mühendislik-Mimarlık Fakültesi, 4-6 Eylül 2003
ELASTİK BİYELLİ KRANK-BİYEL
MEKANİZMALARININ DİNAMİK KARARLILIĞI
HAKKINDA PARAMETRİK İNCELEMELER
Özgür TURHAN
İstanbul Teknik Üniversitesi, Makina Fakültesi, 80191 Gümüşsuyu, İSTANBUL
[email protected]
Gökhan BULUT
İstanbul Teknik Üniversitesi, Makina Fakültesi, 80191 Gümüşsuyu, İSTANBUL
[email protected]
ÖZET
Bu çalışmada, elastik biyelli krank-biyel (KB) mekanizmalarının dinamik kararlılığına çeşitli sistem
parametrelerinin etkisi incelenmiştir. Bu amaçla hareketli biyel viskoelastik malzemeden yapılmış bir EulerBernouilli kirişi olarak modellenmiş, elde edilen kısmi türevli diferansiyel denklem Galerkin Yöntemi
yardımıyla peryodik katsayılı bir adi diferansiyel denklem takımına (Mathieu-Hill denklemleri takımı)
dönüştürülmüş ve bu denklemlerin kararlılığı Genelleştirilmiş Bolotin Yöntemi yardımıyla incelenerek çeşitli
boyutsuz parametre düzlemlerinde kararlılık kartları verilmiştir.
Anahtar Kelimeler: Krank-Biyel Mekanizması, Dinamik Kararlılık, Genelleştirilmiş Bolotin Yöntemi
1. GİRİŞ
Daha hızlı, daha güçlü fakat daha hafif makinalar
yapma genel hedefinin önündeki en büyük engel, bu
koşullar altında, makinaların istenmeyen elastik
davranışlar göstermesidir. Bu nedenle, bu hedefe
yönelik kuramsal çalışmalar arasında elastik uzuvlu
makinaların dinamiği konusundaki araştırmalar
önemli bir yer tutar. Peryodik çevrimli makinalar
söz konusu olduğunda -ki çoğu makina böyledirelastik uzuvların dinamik davranışının bir çok
durumda peryodik katsayılı, lineer, adi diferansiyel
denklemlere (Mathieu-Hill denklemleri) uyduğu;
yani bunların parametre tahrikli sistemler
oluşturduğu bilinmektedir.
Parametre tahrikli
sistemler kendilerine özgü rezonans koşullarına
sahiptir. Bu rezonans koşullarının belirlenmesi
problemi dinamik kararlılık analizi problemi adını
alır ve tıpkı sıradan titreşim sistemlerindeki doğal
frekans hesabı problemi gibi büyük öneme sahiptir.
Genellikle, parametrik ve bileşik rezonans olmak
üzere, iki tip rezonans; buna bağlı olarak da (yalnız
parametrik rezonans koşullarının belirlendiği)
parametrik kararlılık analizi ve (her iki tipten
rezonans koşullarının belirlendiği) tam kararlılık
analizi olmak üzere iki tür kararlılık analizi
ayırdedilir.
Kararlılık
analizinin
sonuçları,
çoğunlukla, seçilmiş bir parametre düzleminde
kararlı ve kararsız parametre bölgelerinin
gösterildiği kararlılık kartları yardımıyla sergilenir.
Esnek uzuvlu makinaların dinamik kararlılık analizi
problemi bir çok araştırmacının ilgisini çekmiştir.
Burada yalnızca Krank-Biyel (KB) mekanizması ile
ilgili çalışmaları anmak gerekirse; Jasinski, Lee ve
Sandor [1], Badlani ve Kleinhenz [2], Zhu ve Chen
[3], Tadjbakhsh ve Younis [4], Turhan [5] ve Wang
[6] elastik biyelli; Badlani ve Midha [7] veTurhan
[8] visko-elastik biyelli KB mekanizmalarının
kararlılığını incelemişler; Chivate ve Farhang [9]
kayış-kasnak mekanizması ile çalıştırılan viskoelastik biyelli bir KB mekanizmasının, Lu, Haque ve
Lakshmikumaran [10] ise zemine elastik olarak
bağlı, elastik biyelli bir KB mekanizmasının
kararlılığını ele almışlardır. Bu çalışmalarda Bolotin
Yöntemi [11],
monodromi matrisi yöntemi,
pertürbasyon yöntemi gibi çeşitli yöntemler
kullanılmıştır.
Anılan çalışmaların her birinde hızın ve bir tek diğer
sistem parametresinin, bazen de bunlara ek olarak
sönümün KB mekanizmasının kararlılığı üzerindeki
etkisi incelenmiş ise de; tüm sistem parametrelerinin
etkilerini topluca ortaya koyan bir çalışma
bulunmamaktadır. Bu çalışmanın amacı, bu çok
önemli
mekanizmada
olası
tüm
tasarım
parametrelerinin kararlılık üzerindeki etkilerini ayrı
ayrı inceleyip kararlılık kartları yardımıyla bir arada
sergilemektir. Bu yapılırken, hız, sönüm, krank
yarıçapı, piston kütlesi gibi etkileri daha önce de
incelenmiş parametreler yanında kaçık merkezli KB
mekanizmalarında merkez kaçıklığı da ilk kez
kararlılık üzerindeki etkisi bakımından ele
alınacaktır.
Çalışmada visko-elastik biyelli, kaçık merkezli bir
Krank-Biyel mekanizması göz önüne alınacak ve bu
mekanizmanın kararlılığı üzerinde etkili olan sistem
parametrelerinin tam bir listesi ortaya konulduktan
sonra tüm bu parametrelerin etkileri , orijinal haliyle
Turhan ve Bulut
bir parametrik kararlılık analiz yöntemi olan Bolotin
yönteminin bir tam kararlılık analiz yöntemine
genelleştirmesi olan Genelleştirilmiş Bolotin
Yöntemi [12] yardımıyla incelenecektir.
L(u) =
∂ 2u
∂ϕ 22
+
EI
∂4
ρAω22
∂x 4
[(1 + ηω2
∂
)u] − [rC 23 (l − x)
∂ϕ 2
F
1
∂ 2u
∂u
+ G 32 (l 2 − x 2 ) + x ]
+ (rC23 + G 32 x) − G 32 u
2
2
2
∂x
ρAω2 ∂x
2. HAREKET DENKLEMLERİ
1
+ (G′3x − rS23] = 0
l
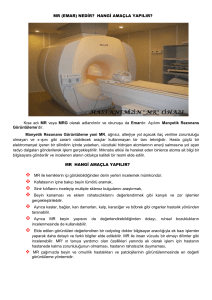
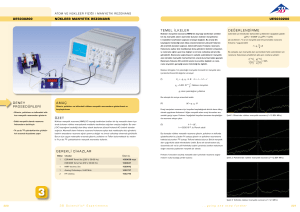
Şekil 1-a daki KB mekanizması göz önüne alınsın ve
biyel dışındaki uzuvların rijid, buna karşılık biyelin,
gerilme ( σ) - şekil değiştirme ( ε ) ilişkisi, E Young
modülünü, η ise viskoz sönüm orantı katsayısını
dε
göstermek üzere, σ = E (ε + η ) olacak şekilde
dt
Kelvin-Voight malzeme modeline (Şekil 1-b) uyan
visko-elastik, düzgün kesitli, homojen, basit
mesnetli bir Euler-Bernouilli kirişi olduğu
varsayılsın.
(1)
kısmi türevli diferansiyel denklemi ile basit mesnet
sınır koşullarından oluşan sınır-değer problemine
uyacağı gösterilebilir [5,8]. Burada,
1
1
&& 3 − rS 23 ω 22 )m 3S 3
− m 4&s& + ( lϕ
3
2
Fx =
C3
(2)
pistonun biyele uyguladığı tepki kuvvetinin boyuna
bileşeni olup ϕ 2 = ω 2 t ,
u = y / l boyutsuz
değişkenleri ile hepsi rijid KB mekanizmasının
kinematiğine ilişkin ifadeler olan ve
ϕ2 nin
fonksiyonu
olarak
kolayca
hesaplanabilen
&& 3 / ω 22 ,
G 3 = ϕ& 3 / ω 2 ,
G ′3 = ϕ
G ′4 = &s& / ω 22 ,
Krankın sabit ω2 açısal hızıyla döndüğü, mekanizma
üzerine bunun gerektirdiği çalıştırma momenti
dışında hiç bir dış kuvvetin etkimediği ve lineer
olmayan terimlere yol açan Coriolis kuvvetlerinin
göz ardı edilebildiği kabulleri altında hareketli
biyelin düzlem içi eğilme titreşimlerinin, (EI, A ve
ρ, biyelin, sırasıyla, eğilme rijidliğini, kesit alanını
ve kütlesel yoğunluğunu göstermek üzere)
Si = sin ϕ i ,
C i = cos ϕ i ,
Sij = sin(ϕ i − ϕ j ),
y
j
ρ,A,EI, l ,(m3)
A
ϕ3
i
3
Fy
r
A0
1
ϕ2
e
4
B
Fx
x
Fy
s
(a)
ηE
E
(b)
Şekil 1 Viskoelastik Biyelli Krank-Biyel Mekanizması
(a) Mekanizma (b) Kelvin-Voight Malzeme Modeli
2
m4
B
Fx
2
1
11. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU
Gazi Üniversitesi, Mühendislik-Mimarlık Fakültesi, 4-6 Eylül 2003
C ij = cos(ϕ i − ϕ j ) gösterilimleri kullanılmıştır.
kütlesini
Ayrıca m3 biyelin, m4 ise pistonun
göstermektedir.
Galerkin yöntemi yardımıyla, (1) de tanımlı sınırdeğer probleminin yerine, onu belli bir yaklaşıklıkla
temsil edecek, sonlu sayıda denklemden oluşan bir
adi diferansiyel denklem takımı geçirilebilir. Bu
amaçla g i (ϕ 2 ) ler bilinmeyen ağırlık fonksiyonları,
iπx
ψ i ( x ) = sin(
) fonksiyonları ise basit mesnet
l
sınır koşullarına sahip hareketsiz kirişin öz
fonksiyonlarından ibaret bir ortogonal fonksiyonlar
takımı olmak üzere, sınır değer probleminin çözümü
N
~
u ( x , ϕ 2 ) = ∑ g i (ϕ 2 )ψ i ( x )
(3)
i =1
sonlu serisi ile yaklaşık olarak temsil edilir ve bu
çözüm (1) de yerine konulup
l
~
∫ L(u )ψ j (x)dx = 0 ;
0
j=1,2,...,N şeklinde N adet ortogonalizasyon şartı
yazılırsa, vektör-matris formundaki ifadesi
ζ
1
g ′′ + Eg ′ + [
E + P (ϕ 2 )]g = q(ϕ 2 )
Ω
Ω2
(4)
şeklinde olan bir adi diferansiyel denklem takımına
ulaşılır. Burada g, elemanları gi(ϕ2) ler olan N
boyutlu bilinmeyenler vektörü; E, elemanları
4
e ii = (πi) olan sabit bir köşegen matris; P(ϕ2),
köşegen elemanları
S S
S
1
µ
Pii (ϕ 2 ) = [ (C 23 − 23 3 ) + (G 32 + 3 G ′3 )
2
C3
3
C3
G ′4
5
](iπ) 2 − G 32
(5)
−λ
lC 3
4
köşegen dışı elemanları ise
Pij (ϕ 2 ) = 2ij
− (−1)
i+ j
G 32
,
i 2 + j2
2
2 2
(i − j )
{[1 − (−1) i + j ]µC 23 ,
i≠j
(6)
ζ=η
λ =
EI
ρAl
Ω = ω2 /
,
4
m4
,
m3
EI
ρAl 4
,
µ = lr
(8)
boyutsuz parametreleri kullanılmıştır. Yapısında
geçen ve KB mekanizmasının kinematiğiyle ilgili
olan S3, C3, S23, C23, G3, G ′3 , G ′4 terimleri ϕ2 nin
2π peryodik fonksiyonları olduğundan (4) denklem
takımı bir Mathieu-Hill denklemleri takımı
oluşturmaktadır. Öte yandan, bu terimler (8) de
tanımlı µ parametresinin yanısıra, ilgilenilen KB
mekanizmasının merkez kaçıklığının bir ölçüsü olan
β = el parametresine de bağlı olduklarından, (5) ten
λ ya bağımlılık da dikkate alınarak P=P(λ,µ,β,ϕ2)
yazılabileceği anlaşılır. Böylece, (4) denkleminin
kararlılık analizinde gerekli olan homojen kısmı,
problemin bağımlı olduğu parametreleri açıkça
gösterecek biçimde
g′′ +
ζ
1
Eg′ + [ 2 E + P(λ, µ, β, ϕ 2 )]g = 0
Ω
Ω
(9)
şeklinde yazılabilir. Buna göre, sistemin kararlılığı
üzerinde etkili olacak sistem parametreleri
Ω = ω2 /
EI
ρAl
µ = lr , β =
4
, ζ=η
EI
ρAl
4
, λ =
e
l
m4
,
m3
(10)
şeklindeki beş parametreden ibarettir. Aşağıda bu
parametrelerinin her birinin KB mekanizmasında
elastik biyelin dinamik kararlılığı üzerindeki etkileri
incelenecektir.
3. KARARLILIK ANALİZİ
Genelleştirilmiş Bolotin Yöntemine [12] göre
i=j
dinamik davranışı
(9) şeklindeki bir Mathieu-Hill
denklemleri takımınca tasvir edilen N serbestlik
dereceli bir dinamik sistemin, bir eksenine Ω nın
yerleştirildiği bir parametre düzlemindeki kararsızlık
(rezonans) bölgelerinin sınırındaki Ω değerlerinin
şöyle hesaplanabileceği gösterilebilir [13]:
p=-m,..,-1,0,1,..m
matrisleri
Pp=Pp(λ,µ,β);
P=P(λ,µ,β,ϕ2) matrisinin
m
şeklinde olan NxN boyutlu bir matris, q(ϕ2) ise
elemanları
q i (ϕ 2 ) =
2
{[1 − (−1) i ]µS 23 + (−1) i G ′3
iπ
(7)
şeklinde tanımlı Nx1 boyutlu bir sütun matris olup
P (λ, µ, β, ϕ 2 ) =
∑ Pp (λ, µ, β)e ipϕ
2
(11)
p=− m
şeklinde
bir
karmaşık
Fourier
serisine
açındırılmasıyla elde edilen NxN boyutlu karmaşık
Fourier katsayı matrisleri; Ei, Fi ler k. hiper-satır, q.
hiper-sütun elemanları
Turhan ve Bulut
E 0kq = 2ikIδ kq ,
polinomunun bir özdeğeri olmamak kaydıyla (17)
1 = 1 + 1 yazılıp (18) denklemi
denkleminde Ω
δ
E1kq = ζE
F0kq = − k 2 Iδ kq + Pk −q , F1kq = iqζE,
Ω
F2kq = E
(12)
M o = M o + 1δ M1 +
şeklinde tanımlı NxN matrisler olan, aslında sonsuz
boyutlu fakat yaklaşık bir hesapta −K ≤ k ≤ + K ,
−K ≤ q ≤ + K
olacak
şekilde
η1xη1 ;
η1 = N(2K + 1) boyutlu kısımları dikkate alınan
hiper-matrisler; Ui ler
0
U0 =
- F0
I
0
0
, U1 =
,
- E 0
F
E
1
1
0
U2 =
- F2
0
0
1
δ2
M2 ,
M1 = M1 +
M2 = M2
1 M ,
2
2δ
(19)
değerleriyle Ω için çözülebilir ve Ω buradan
Ω=
δΩ
δ+ Ω
şeklinde hesaplanabilir.
Problemin kurgusu şöyle bir gözden geçirildiğinde
kolayca görüleceği gibi (14-16) problemlerinden
hangisi söz konusu olursa olsun (18) denklemindeki
G
matrisi
G=G(ζ,λ,µ,β)
şeklinde
sistem
parametrelerine bağlı olacaktır. Buna göre bu
parametrelerden üçü sabitlenip dördüncüsü adım
adım değiştirilerek Ω nın
(13)
şeklinde tanımlı, yaklaşık hesapta 2η1x 2η1 boyutlu
hiper-matrisler; B(Ui) ler Ui lerin [12] ve [14] te
tanımları verilen, yaklaşık hesapta η2 xη2 ;
η 2 = 2η1 (2η1 − 1)
boyutlu karşılıklı toplam
(bialternate sum) matrisleri olmak üzere, harmonik
parametrik rezonans sınırlarındaki Ω değerleri
det[G (ς, λ, µ, β) − ΩI ] = 0
(20)
harmonik altı parametrik rezonans sınırlarındaki Ω
değerleri
özdeğer analizi probleminden hesaplanmasıyla, bu
dördüncü parametre ile Ω nın oluşturduğu parametre
düzleminde, rezonans bölgelerinin sınırları elde
edilebilir.
Bu yapılırken, gerçel olmayan Ω
değerlerinin ve (yapılan hesabın bir yaklaşık hesap
olmasıyla bağlantılı olarak) yakınsaması yeterli
olmayan Ω değerlerinin
elenmesi gerektiğini
belirtelim fakat kısalık bakımından burada bunu
yapmanın yöntemlerinin ayrıntılarına girmeyelim.
det[[F0 + 1 / 2iE 0 − 1 / 4I] + 1 / Ω[F1 + 1 / 2iE1 ]
4. PARAMETRİK İNCELEMELER
det [F0 + 1 / ΩF1 + 1 / Ω 2 F2 ] = 0
2
+ 1 / Ω F2 ] = 0
(14)
Bu bölümde, yukarıda kısaca tanıtılan hesapların, bu
amaç için özel olarak geliştirilen bir FORTRAN
programı yardımıyla gerçekleştirilmesi ile elde
edilen sonuçlar sergilenecektir. Ancak, hesaba
geçmeden önce, elde edilecek sonuçların
güvenilirliğini
etkileyen
bazı
hesap
parametrelerinden kısaca söz edilmesi yerinde
olacaktır.
(15)
bileşik rezonans sınırlarındaki Ω değerleri ise
det[B(U 0 ) + 1 / ΩB(U1 ) + 1 / Ω 2 B(U 2 )] = 0
(16)
problemlerinin çözümünden hesaplanabilir.
Bu
çözümlerin nasıl gerçekleştirilebileceğini görmek
için her üç problemi temsilen
1 M + 1 M =0
det M o + Ω
1
2
Ω2
Bu parametrelerden ilki, (11) denklemindeki Fourier
serisi açınımlarında dikkate alınacak terim sayısını
belirleyen
m
parametresidir.
Sonuçların
güvenilirliğini güvence altına alacak m değerini
belirleyebilmek için, Pij fonksiyonlarının (5-6)
denklemlerindeki gerçek ifadeleri ile (11)
denklemindeki Fourier serisi açınımlarının farklı
parametre kombinasyonlarına karşılık gelen
durumlarda ayrıntılı bir karşılaştırması yapılmış ve
en az m=8 (8 harmonik) alınması gerektiği görülüp
hesaplarda bu değer benimsenmiştir. Buna göre bir
parametre taranarak gerçekleştirilen hesapların her
adımında 2m+1=17 adet Pp karmaşık Fourier
katsayıları matrisinin hesaplanması gerekmiş ve bu
iş katsayıları veren integraller Simpson kuralı ile
sayısal yoldan hesaplanarak gerçekleştirilmiştir.
(17)
problemi ele alınırsa, Ω2 ile çarpılıp det M o ≠0
olmak kaydıyla
− M o−1M1 − M o−1M 2
det[G − ΩI ] = 0 ; G =
(18)
I
0
şeklinde lineerleştirilerek bu problemin Ω için bir
özdeğer hesabı problemine dönüştürülebileceği
görülür. Artık Ω buradan, uygun bir özdeğer hesabı
rutini yardımıyla, kolaylıkla hesaplanabilecektir.
det M o =0 olması halinde ise 1δ ilgili matris
4
11. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU
Gazi Üniversitesi, Mühendislik-Mimarlık Fakültesi, 4-6 Eylül 2003
Hesaplar üzerinde etkili iki diğer parametre de (3)
denklemiyle verilen Galerkin serisindeki N terim
sayısı (ki burada mod sayısı diye anılacaktır) ve (12)
matrislerinin boyutunu tayin eden K sayısıdır.
Bunlardan N sayısı, kullanılan ayrık matematiksel
modelin gerçek sürekli sistemi temsil yeteneğinin bir
ölçüsünü oluştururken K sayısı, bir yandan ele
alınacak parametre düzlemi üzerinde saptanacak
kararsızlık (rezonans) bölgelerinin sayısını bir
yandan
da
bunların
hesap
hassasiyetini
belirlemektedir. Öyle ki 1. mertebeden kararsızlık
bölgelerinden K. mertebeden kararsızlık bölgelerine
kadar elde edilmekte, bunlardan 1. mertebeden
olanlar için K. mertebeden (en yüksek) yaklaşıklık,
diğerleri için ise giderek azalan mertebeden
yaklaşıklıklar
elde
edilmektedir.
Bu
söylenilenlerden kolayca anlaşılacağı gibi, N ve K
değerlerinin kararlılık analizi sonuçlarında bir
yakınsama oluşmasına yetecek kadar büyük
seçilmesi gerekmektedir. Bu seçimlerden Bölüm 4.1
de ayrıntılı olarak söz edilecektir.
H
Ω11
= 9.869 ,
H
H
Ω14
= 2.467 , Ω15
= 1.974 , ...
S
Ω11
= 19.739 ,
i=1,2,...,N;
k=1,2,...,K
2ωi
( 2 k −1)
i=1,2,...,N;
k=1,3,5, ...
ωi m ω j
k
i, j=1,2,...,N; k=1,2,...,K
(26)
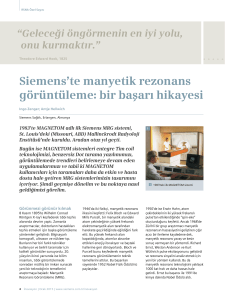
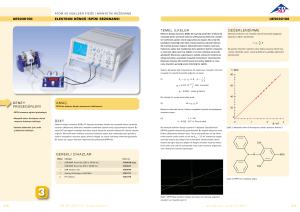
Merkez kaçıklığının kararlılık üzerindeki etkisini
incelemek üzere, l = 0.3 m, µ = r / l = 0.3 ,
λ = m 4 / m 3 = 0.5 şeklinde tanımlı bir KB
e
mekanizması için Ω − β(= ) parametre düzleminde
l
farklı mod sayıları ve sönüm değerleri için elde
edilen kararlılık kartları
Şekil 2, 3 ve 4 te
verilmiştir. Bu şekillerde taralı alanlar kararsız
parametre
bölgelerini
(rezonans
bölgeleri)
göstermektedir. Ayrıca, sınırları koyu renk çizilmiş
bölgeler harmonik parametrik rezonans bölgeleri,
açık renk çizilmiş olanlar ise harmonik altı
parametrik rezonans bölgeleridir. Şekillerde β<0.7
bölgesinin dışına çıkılmamasının nedeni krankın
dönebilmesi için β+µ<1 koşulunun sağlanmasının
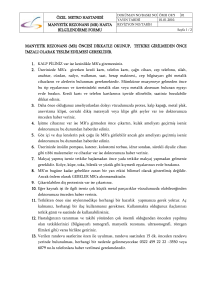
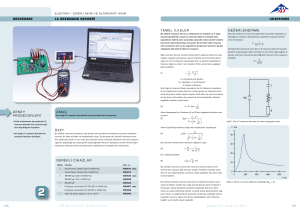
gerekmesidir. Bu şekillerden Şekil 2 de yalnızca 1.
modu hesaba katan (N=1) tek terimli Galerkin
açınımı, Şekil 3 ve 4 te ise, sırasıyla, 2 ve 3 mod
hesaba katan (N=2 ve N=3) Galerkin açınımları
kullanılmıştır. Şekillerin her birinde (a) da daha
düşük
(ζ=0.001) (b) de ise daha yüksek (ζ=0.01)
sönüm değerlerine ilişkin sonuçlar verilmiştir. Şekil
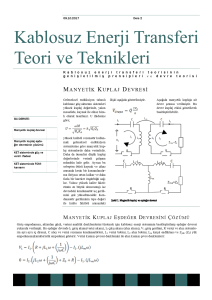
2, 3 ve 4 ün çıplak gözle bir karşılaştırması, N=2 ve
N=3 ile yapılan hesapların, 1. mod bakımından
zaten kararsız olan bölgelerin içerisinde 2. moda ve
3. moda ait kararsızlık bölgelerinin de bulunacağı
kuramsal öneme sahip bilgisini sağlamakla birlikte,
kararsız bölgenin dış sınırını oluşturan birinci moda
ait bölge sınırlarında gözle görülür bir değişikliğe
yol açmadıklarını ortaya koymaktadır. Buradan N=1
ile yapılan hesapların pratik bakımdan yeterli olduğu
izlenimi doğsa da daha kesin bir hükme varabilmek
ve hesaplarda kullanılacak N ve K değerlerini
kararlaştırabilmek için Tablo 1 ve 2 de birinci moda
ait bazı kararlılık sınırlarının farklı N ve K değerleri
ile elde edilen sayısal değerleri karşılaştırılmıştır.
Bu Tabloların (ve burada verilmeyen diğerlerinin)
incelenmesinden, pratik bakımdan önem taşıyan 1.
mod kararlılık sınırlarında yeterli yakınsama için
N=2, K=8 alınmasının uygun olacağı anlaşılmış ve
tüm hesaplarda bu değerler benimsenmiştir. Burada,
N=2 gibi mütevazi bir terim sayısıyla sürekli
sistemin dinamik davranışına yakınsama sağlayan
(22)
(23)
i. ve j. modlara ait k. mertebeden (ikili) bileşik
rezonans bölgeleri ise
C
Ω ijk
=
S
Ω13
= 3.948 ,
4.1. Merkez Kaçıklığının Kararlılık Üzerindeki
Etkisi
i. moda ait k. mertebeden harmonik altı parametrik
rezonans bölgeleri
Ω Sik =
(25)
noktaları civarından çıkmaları gerektiği anlaşılır.
Aşağıda verilecek tüm kararlılık kartlarının bu
beklentilerle uyumlu olduğu görülecektir.
(21)
ωi
k
S
Ω12
= 6.579 ,
S
S
Ω14
= 2.819 , Ω15
= 2.191 , ...
şeklinde belli olan sistemde kararsızlık bölgelerinin
–var olmaları halinde- Ω ekseninin hangi
noktalarından çıkacağı bellidir. Buna göre, sistemde
sönüm bulunmaması halinde, i. moda ait
k.
mertebeden
harmonik parametrik rezonans
bölgeleri
H
Ω ik
=
H
Ω13
= 3.289 ,
harmonik altı parametrik rezonans bölgelerinin ise
Hesaba geçmeden kaydedilmesinde yarar olan bir
başka husus da elde edilecek kararlılık kartlarının
görünümleri hakkındaki kuramsal beklentilerdir.
Floquet Kuramına göre, burada ele alınan ve
boyutsuz doğal frekansları (4) denklemindeki E
matrisinin elemanlarının karekökleri olarak
ωi=i2π2
H
Ω12
= 4.935 ,
(24)
noktalarından çıkacaktır. Aşağıda sunulacak
hesapların hiç birinde pratik bakımdan anlamlı
parametre bölgelerinde bileşik rezonans bölgesine
rastlanmadığı için bunlar bir yana bırakılır ve (21)
değerleri (22) ve (23) ifadelerinde yerlerine
konularak parametrik rezonans bölgelerinin çıkış
noktaları belirlenirse, birinci moda (i=1) ilişkin
harmonik parametrik rezonans bölgelerinin
5
Turhan ve Bulut
Galerkin yönteminin
geçmeyelim.
Tablo 1 β=0.3 İçin
gücüne
işaret
H
Ω11
Bölgesi Alt Sınırı (ζ=0.001)
K
Ω
N
4
8
12
16
1
6.554270
6.554891
6.554891
6.554891
2
6.517405
6.517985
6.517985
6.517985
3
6.517250
6.517828
6.517828
6.517828
Tablo 2 β=0.3 İçin
S
Ω 12
Bölgesi Alt Sınırı (ζ=0.001)
K
Ω
N
etkisi olumsuzdur. Biyelin eğilme titreşimlerinin 1.
doğal frekansı (Boyutsuz karşılığı: ω1=π2) ile
karşılaştırılabilir mertebedeki yüksek hızlarda
kararsızlık neredeyse kaçınılmaz
görünmektedir.
Ayrıca, bunun yarısı mertebesindeki hızlardan
itibaren dar kararsızlık bantlarıyla karşılaşma
olasılığının da dikkate alınması gerektiği
anlaşılmaktadır. ii) Malzeme sönümünün kararlılık
üzerindeki etkisi olumludur. Sivri uçlu kararsızlık
bölgelerinin uçlarını yuvarlatıp bunları hız
ekseninden kopartarak özellikle küçük merkez
kaçıklığına sahip mekanizmalarda kararlı hız
aralıklarını genişletmektedir. Şekillerden çıplak
gözle görülmese de sönümün hesaplara yansıyan bir
etkisinin de sistem doğal frekanslarını ve bununla
bağlantılı olarak rezonans bölgesi sınırlarını hafifçe
aşağı çekmesi olduğunu belirtelim. iii) Merkez
kaçıklığının kararlılık üzerindeki etkisi olumsuzdur.
Kaçıklık arttıkça kararsızlık bölgeleri genişlemekte
ve üst mertebeden yeni kararsızlık bölgeleri devreye
girmektedir. Ancak β<0.1 olacak şekildeki “makul”
bir Merkez kaçıklığının kararlılık üzerinde kayda
değer bir etkisi bulunmamaktadır.
etmeden
4
8
12
16
1
5.456263
5.457946
5.457946
5.457946
2
3
5.437181
5.437027
5.438651
5.438595
5.438651
5.438596
5.438651
5.438596
Şekil 2-4 ten dikkate alınan parametrelerin kararlılık
üzerindeki etkileri bakımından çıkartılabilecek
sonuçlara gelince; i) Hızın kararlılık üzerindeki
Ω
Ω
(a)
(b)
β
β
Şekil 2 KB Mekanizmasının Kararlılığına Merkez Kaçıklığının Etkisi (1 Mod)
(a) ζ=0.001, (b) ζ=0.01
6
11. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU
Gazi Üniversitesi, Mühendislik-Mimarlık Fakültesi, 4-6 Eylül 2003
Ω
Ω
(b)
(a)
β
β
Şekil 3 KB Mekanizmasının Kararlılığına Merkez Kaçıklığının Etkisi (2 Mod)
(a) ζ=0.001, (b) ζ=0.01
Ω
Ω
(a)
(b)
β
β
Şekil 4 KB Mekanizmasının Kararlılığına Merkez Kaçıklığının Etkisi (3 Mod)
(a) ζ=0.001, (b) ζ=0.01
7
Turhan ve Bulut
anlaşılmaktadır. ii) Malzeme sönümünün kararlılık
üzerindeki etkisi olumludur ve yine Bölüm 4.1 deki
değerlendirmeler geçerlidir. iii) Piston kütlesinin
kararlılık üzerindeki genel etkisi olumsuzdur. Piston
kütlesinin artması hem, genellikle (Genellikle çünkü
bunun önemli istisnaları bulunduğu şekilden
görülmektedir), var olan kararsızlık bölgelerinin
genişlemesine, hem de üst mertebeden yeni
kararsızlık bölgelerinin devreye girmesine yol
açmaktadır. Buradan, çok yüksek hızlara çıkması
istenen KB mekanizmalarında pistonun elden
geldiğince hafif yapılması gerektiği anlaşılmaktadır.
Esasen bu, sarsma kuvvetlerinin azaltılması, düzgün
çalışmanın
sağlanması,
mafsal
ve
yatak
kuvvetlerinin küçültülmesi gibi başka dinamik
gerekçelerle de istenen bir özelliktir.
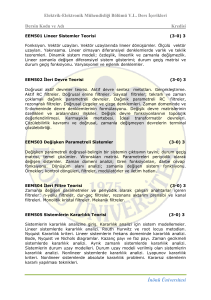
4.2. Krank-Biyel Mekanizmasının Kararlılığına
Piston Kütlesinin Etkisi
l = 0.25 m, µ = r2 / l = 0.25 , β = 0 şeklinde
tanımlı merkezcil bir KB mekanizması için, N=2,
K=8 değerleri ve iki farklı sönüm değeri için
Ω − λ(=
m4
)
m3
düzleminde elde edilen
kararlılık
kartları Şekil 5 te verilmiştir.
Bu şekillerin incelenmesiyle, göz önüne alınan
parametrelerin kararlılık üzerindeki etkileri hakkında
şu sonuçlara varılmaktadır: i) Hızın kararlılık
üzerindeki etkisi olumsuzdur ve Bölüm 4.1 deki
değerlendirmeler geçerlidir. Ancak, birinci doğal
frekansın üstündeki hızlarda kararlı çalışmayı
olanaklı kılan dar bir kararlılık bandının bulunacağı
Ω
Ω
(a)
(b)
λ
λ
Şekil 5 KB Mekanizmasının Kararlılığına Piston Kütlesinin Etkisi
(a) ζ=0.001, (b) ζ=0.01
yine Bölüm 4.1 deki değerlendirmeler geçerlidir.
iii) Krank yarıçapının kararlılık üzerindeki genel
etkisi olumsuzdur. Krank yarıçapının artması hem istisnai parametre bölgeleri dışında- var olan
kararsızlık bölgelerinin genişlemesine, hem de üst
mertebeden yeni kararsızlık bölgelerinin devreye
girmesine yol açmaktadır. Her ne kadar
kendilerinden
beklenen
görevleri
yerine
getirebilmek için KB mekanizmalarının 0.2-0.3
aralığında bir µ değerine sahip olmaları gerektiği ve
uygulamanın bu yönde olduğu bilinmekte ise de,
dikkat çekici bir özellik olarak, çok küçük µ
değerleri bölgesinde kararlılığı yitirmeden çok
yüksek hızlara çıkma olanağının bulunduğunu not
etmekte yarar vardır.
4.3. Krank-Biyel Mekanizmasının Kararlılığına
Krank Yarıçapının Etkisi
l = 0.25 m, λ = m 4 / m 3 = 0.5 , β = 0 şeklinde
tanımlı merkezcil bir KB mekanizması için, N=2,
K=8 değerleri ve iki farklı sönüm değeri için
Ω − µ(= lr ) düzleminde elde edilen
kararlılık
kartları Şekil 6 da verilmiştir.
Bu şekillerin incelenmesiyle, göz önüne alınan
parametrelerin kararlılık üzerindeki etkileri hakkında
şu sonuçlara varılmaktadır: i) Hızın kararlılık
üzerindeki etkisi olumsuzdur ve Bölüm 4.1 ve 4.2
deki değerlendirmeler geçerlidir. ii) Malzeme
sönümünün kararlılık üzerindeki etkisi olumludur ve
8
11. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU
Gazi Üniversitesi, Mühendislik-Mimarlık Fakültesi, 4-6 Eylül 2003
Burada son bir not olarak, merkezcil
KB
mekanizmalarında stroğun s=2r olacak biçimde
krank yarıçapının iki katına eşit olmasıyla bağlantılı
olarak, Şekil 6 nın bu tip KB mekanizmaları
s
özelinde bir Ω − 2l diyagramı olarak okunmasının
da mümkün olduğunu, dolayısıyla büyüyen stroğun
kararlılık üzerinde olumsuz etkisi bulunacağının
anlaşıldığını kaydedelim.
Ω
Ω
(b)
(a)
µ
µ
Şekil 6 KB Mekanizmasının Kararlılığına Krank Yarıçapının Etkisi
(a) ζ=0.001, (b) ζ=0.01
birlikte bu problemde bileşik rezonansların
uygulama bakımından etkili olmadığı ve parametrik
kararlılık analizinin yeterli olduğu sonucuna
varılmıştır.
5. SONUÇ
Biyeli elastik diğer uzuvları rijid kabul
Krank-Biyel mekanizmalarında çeşitli
parametrelerinin biyelin düzlem içi
titreşimlerinin
kararlılığı
üzerindeki
incelenmiştir.
edilen
sistem
eğilme
etkileri
Kararlılık
üzerindeki
etkisi
incelenen
parametrelerden hız, merkez kaçıklığı, krank
yarıçapı ve piston kütlesinin genel olarak olumsuz,
malzeme sönümünün ise olumlu etkisi bulunduğu
belirlenmiştir.
Buna göre çok yüksek hızlara
çıkması düşünülen bir Krank-Biyel mekanizmasının
Modelde krank ve piston elastikliğinin göz ardı
edilmiş olması, bu uzuvların temel frekanslarının
biyelinkine oranla yüksek mertebeden olması
halinde -ki gerçek durum budur- biyelin kendi
yüksek titreşim modlarının göz ardı edilmesinden ki bu çalışmada bunun yerinde olduğu gösterilmiştirdaha büyük bir eksiklik değildir.
e
tasarımında β = l merkez kaçıklığı / biyel boyu
oranı, µ = lr krank yarıçapı / biyel boyu oranı ve
λ=
Buna karşılık, mekanizmanın kendi parametrelerinin
etkilerini açıkça gözleyebilmek amacıyla, olası dış
kuvvetlerin dikkate alınmamış olması, burada elde
edilen sonuçları, böyle kuvvetler etkisindeki
mekanizmalara doğrudan uygulanamaz hale
getirmektedir. Somut durumlarda bu etkileri de
hesaba katarak buradaki analizin yinelenmesi
gerekeceğinin belirtilmesi gerekir.
m4
m3
piston kütlesi / biyel kütlesi oranı elden
geldiğince küçük; malzeme sönümü ise elden
geldiğince büyük tutulmalıdır. Ayrıca, aynı
EI
Ω = ω2 /
boyutsuz hız oranında kalarak
ρAl 4
fiilen daha yüksek hızlara çıkabilmek için biyelin
büyük eğilme rijidliğine fakat küçük kütle ve
uzunluğa sahip olacak biçimde tasarlanması; yani
biyelin eğilme titreşimlerinin doğal frekanslarının
elden geldiğince yüksek tutulması gerektiği
Yapılan incelemelerde, zaten parametrik rezonansın
hüküm sürdüğü çok yüksek hız bölgelerinde bazı
bileşik rezonans bölgelerine rastlanmış olmakla
9
Turhan ve Bulut
14. Fuller, A., T., 1968, Conditions for A Matrix to
Have Only Characteristic Roots With Negative
Real Parts, Journal of Mathematical Analysis
and Aplications, 23, 71-98
anlaşılmaktadır. Bütün bu sonuçlar sağ duyuya
uygun ve beklenen sonuçlardır.
Bunların yanısıra, yüksek hızlara çıkılırken rastlanan
ilk rezonans bölgesinin üzerinde dar da olsa kararlı
çalışma bölgelerinin var olabileceği görülmüştür.
Bu, “kritik üstü” hızlarda çalışacak mekanizmalar
tasarlanabileceğini gösteren anlamlı bir sonuç olarak
görülmelidir.
KAYNAKLAR
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
Jasinski, P.W., Lee, H.C., Sandor, G.N., 1970,
Stability and Steady-State Vibrations in A
High-Speed Slider-Crank Mechanism, J. of
Applied Mech., 1069-1076.
Badlani, M., Kleinhenz, N., 1979, Dynamic
Stability of Elastic Mechanisms, ASME J.
Mech. Des., 101, 149-153.
Zhu, Z.G., Chen, Y., 1983, The Stability of
Motion of A Connecting Rod, ASME J. Mech.,
Trans. And Autom. in Design, 105, 637-640.
Tadjbakhsh, I.G., Younis, C.J., 1986. Dynamic
Stability of the Flexible Connecting Rod of A
Slider-Crank
Mechanism,
ASME
J.
Mech.,Trans. and Autom. in Design, 108, 487496.
Turhan, Ö., 1995. Dynamic Stability of FourBar and Slider-Crank Mechanism With Elastic
Coupler, Mech. and Mach. Theory, 30, 871882.
Wang, Y.M.,1998, The Stability Analysis of A
Slider-Crank Mechanism Due To the Existence
of Two-Component Parametric Resonance, Int.
J. of Solids and Structures, 36, 4225-4250.
Badlani, M., Midha, A., 1983, Effect of Internal
Material Damping on the Dynamics of A
Slider-Crank Mechanism, 105, 452-459.
Turhan, Ö., 1996, Dynamic Stability of FourBar and Slider-Crank Mechanisms With
Viscoelastic (Kelvin-Voight Model) Coupler,
Mech. and Mach. Theory, 31, 77-78.
Chivate, P.N., Farhang, K., 1993, Parametric
Stability
of
Belt-Driven
Slider-Crank
Mechanisms With Flexible Coupler, ASME
Dyn. and Vib. of Time-Varying Sys. and Str.,
56, 97-109.
Lu, S.Y., Haque, I., Lakshmikumaran, A., 1995,
An Investigation of the Dynamic Stability of A
Slider-Crank Mechanism with Link and Drive
Train Flexibility, Journal of Sound and
Vibration, 182,3-22.
Bolotin, V.V., 1964, The Dynamic Stability of
Elastic Systems, Holden-Day Inc., California.
Turhan, Ö., 1998, A Generalized Bolotin’s
Method for Stability Limit Determination of
Parametrically Excited Systems, Journal of
Sound and Vibration, 216, 851-863.
Bulut, G., Elastik Uzuvlu Makinaların Dinamik
Kararlılığı, Y. Lisans Tezi, İstanbul Teknik
Üniversitesi, Fen Bilimleri Enstitüsü, 2002.
10