Fırat Üniversitesi-Elazığ
DA-DA GÜÇ DÖNÜŞTÜRÜCÜLERİNDE KARMAŞIKLIK VE GRİ DENETLEYİCİ
İLE DENETİMİ
Mehmet SAMAN1, Mehmet KARAKÖSE2, Erhan AKIN2
1
2
Teknik Bilimler MYO Elektrik Bölümü
Fırat Üniversitesi
msaman @firat.edu.tr
{eakin,mkarakose}@firat.edu.tr
karmaşık davranışların varlığını en azından bulgusal olarak
bilmekteydiler. Bu problemlerin üstesinden gelmek için
deneme yanılma yöntemiyle devre parametrelerinin
ayarlanması gibi çözümlere başvurmuşlardır [3]. Literatüre
baktığımızda güç elektroniği devrelerindeki karmaşık
davranışlara ilişkin pek çok çalışma görürüz. Bunlardan DADA güç dönüştürücüleriyle ilgili olarak oldukça çok çalışmaya
rastlarız. Banerjee [4], doğrusal olmayan güç elektroniği
devrelerinin modellenmesi ve karmaşık davranışların varlığını
gösteren çalışması bu konudaki ilk esaslı çalışmalardan
birisidir. Tse [1], makalesinde dönüştürücü devrelerde
karmaşık davranışların varlığından bahsederek kaotik
davranışın varlığını göstermiştir. Tse [3], bir başka
çalışmasında dönüştürücü devrelerde karmaşık davranışların
araştırılmasını metodolojik olarak vererek, karmaşık
davranışların analiz ve saptanmasını ortaya koymuştur. Dai
[6], akım kontrollü alçaltan-yükselten DA-DA dönüştürücüde
at nalı biçiminde kaotik bir çekerin varlığını göstermiştir.
Maity [7], alçaltan dönüştürücüde çatallaşma ve kaosun
varlığını deneysel bir çalışmayla ortaya koymuştur.
Tüm bu literatür ışığında DA-DA güç dönüştürücülerinin
karmaşık davranışlar sergilediği, modelleme, analiz ve
denetiminde doğrusal olmayan sistemlerde kullanılan
yöntemlerin yanında sayısal ve melez yöntemlerde kullanılır.
Teknolojik gelişimler bu devreleri kullanma ihtiyacını
artırması modelleme, analiz ve denetim için yeni ve farklı
yöntemlerin çalışılmasını gerekli kılmaktadır.
DA-DA güç dönüştürücüleri geleneksel olarak, akım veya
gerilim geri beslemeli oransal bir denetleyici ve darbe genliği
modülasyonu
ile
denetlenirler.
Bu
devrelerin
modellenmesinde ise klasik olarak iki modelleme yöntemi
kullanılır: sürekli zaman ortalama durum uzay modeli ve ayrık
zaman yenilemeli model [1,3,4]. Literatürde bu geleneksel
yöntemlerin dışında modelleme ve denetleme yöntemleri de
mevcuttur.
Marietho [5], çalışmasında, DA-DA dönüştürücülerde son
zamanlarda kullanılan melez denetim yöntemlerini inceleyerek
avantaj ve dezavantajlarını karşılaştırmıştır. Bu çalışmada,
uyarlanabilir tahmini kontrol, belirgin tahmini model kontrol,
dayanımlı yörünge takibi için örneklenmiş veri kontrolü,
gevşek dinamik programlama ve dengeleme kontrol
yaklaşımları ele alınmıştır. Martinez [8], yükselten DA-DA
dönüştürücünün kontrolü için YSA tasarlayan bir algoritma
geliştirmiştir. Mayo [9], çok seviyeli DA-DA yükselten
dönüştürücünün modellenmesi ve kontrolü için durum uzay
modeli kullanmıştır. Almer [10], alçaltan dönüştürücünün
modellenmesi ve denetimi için anahtarlamalı modelleme
yöntemini önermiştir.
Gri sistem teorisi belirsizlik içeren sistemlerde,
modelleme, kontrol, sınıflandırma ve analiz amacıyla
kullanılan bir yöntemdir. Bir sistem olağanüstü karmaşık ve
ÖZET
DA-DA dönüştürücüler yaygınlaşan kullanım alanlarıyla
beraber daha fazla incelenmeye değer olmuşturlar. Basit
yapılarına
karşın
oldukça
karmaşık
davranışlar
sergileyebilirler. Bu davranışların tasarım aşamasında
bilinmesi çalışma güvenliği bakımından gereklidir.
Günümüzde DA-DA dönüştürücüler farklı denetleme
teknikleriyle çalıştırılmaktadırlar. Gri sistem teorisi klasik
yaklaşımların yetersiz kaldığı pek çok noktada sistemlerin
tanımlanması ve denetimi için yeni araçlar sunar. Bu
bildiride, karmaşık davranışlar sergilediği bilinen DA-DA
alçaltan dönüştürücü için yeni bir denetleyici önerilmiştir.
Anahtar Kelimeler: Karmaşıklık, Karmaşık sistemler,
Karmaşık davranışlar, Güç elektroniği Da-Da Dönüştürücüler,
Gri sistem teorisi
1.
Bilgisayar Mühendisliği Bölümü
Fırat Üniversitesi
GİRİŞ
Güç
elektroniği
endüstriden, konutlara, ulaşım
araçlarından, iletişim araçlarına kadar pek çok sahadaki
uygulamaların bir zorunluluğu olarak ortaya çıkmış bir bilim
dalıdır [1].
Son zamanlarda, taşınabilir bilgisayar, cep
telefonu gibi ürünler yanında, güneş pillerinin kullanımına da
artan bir talep mevcuttur. Tüm bu ürünlerde DA-DA güç
dönüştürücülerinin kullanımı söz konusudur [2].
DA-DA güç dönüştürücüler tasarlanırken çoğunlukla
periyot-1 rejiminde, düzgün güç çıkışı sağlamaları amaçlanır.
bu devreler, her durumda periyot-1 çalışmada istenilen çıkışı
sağlayacak denetleyiciler ile çalıştırılırlar [3]. DA-DA güç
dönüştürücüleri anahtarlamalı devreler olduğundan birden
fazla devre topolojisi barındırırlar. Hem birden fazla devre
topolojisinin varlığı, hem de kullanılan denetleyicilerden
dolayı doğrusal olmayan özellikler taşırlar. Bu doğrusal
olamayan özelliklerden dolayı, karmaşık davranışların
varlığını gözlemlemek mümkündür. Bu karmaşık davranışlar,
beklenmedik yapısal değişimlerin varlığını gösteren sınır
çakışma çatallaşması, periyot katlama çatallaşması ve diğer
düzgün çatallaşmalar ve kaotik ve yarı kaotik davranışlar
olarak karşımıza çıkarlar. Bozucu ve gürültü gibi dış etkenler
veya devre parametrelerindeki değişimler bu tür davranışların
ortaya çıkmasının sebebini teşkil ederler [4].
DA-DA güç dönüştürücüleri tasarlanırken çalışma
sınırlarının tespit edilmesi ve hangi şartlar altında hangi
karmaşık davranışın gözlemleneceğinin saptanması önemlidir.
Hem devre elemanlarının güvenliği hem de dönüştürücünün
istenilen
şekilde
çalışması,
istenmeyen
durumlarla
karşılaşılmaması için bu analizlerin tasarım aşamasında
yapılması önemlidir [3]. Dönüştürücünün amaçlanan çıkışı
minimum hata ile sağlaması seçilen denetleyiciye bağlıdır [5].
Tasarımcı ve mühendisler, güç elektroniği devrelerindeki
184
Elektrik-Elektronik ve Bilgisayar Sempozyumu 2011
kaotik özelliklere sahip olsa bile gri sistem olarak ele alınabilir
[11]. DA-DA güç dönüştürücüleri karmaşık davranışlar
sergileyen devrelerdir, gri sistem olarak ele alınmaları
mümkündür.
Literatüre baktığımızda doğrusal olamayan pek çok
sistemin gri sistem teorisinin sağladığı imkânlarla
modellendiği ve denetlenebildiğini görebiliriz. Kayacan [12],
bu yapıyı kullanarak doğrusal olmayan bir sıvı seviyesinin
denetimini önermiştir. Xia [13], ise GM(0,N) modelle bir gri
denetleyici önermiş ve klasik PID yerine gri denetleyici
kullanarak karmaşık davranışlar sergileyebilen fırçasız doğru
akım motorunun hız kontrolünü gerçekleştirmiştir. Saman
[14], gri sistem teorisi yardımıyla asenkron motorların vektör
kontrolünde akı tahmini gerçekleştiren bir gri denetleyici
önermiştir.
Bu çalışmada, karmaşık davranışlar sergileyen DA-DA
alçaltan dönüştürücünün gri sistem yardımıyla modellenmesi
ve kontrolü hedeflenmektedir. Çalışma beş bölümden
oluşacaktır. Birinci bölüm giriş ve literatür bilgilerini
içermektedir. İkinci bölümde DA-DA alçaltan dönüştürücünün
çalışması, modellenmesi ve sergilediği karmaşık davranış
örnekleri gösterilmektedir. Üçüncü bölümde önerilen yöntem,
dördüncü bölümde benzetim sonuçları ve son olarak sonuçlar
yer almaktadır.
2.
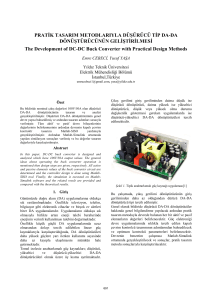
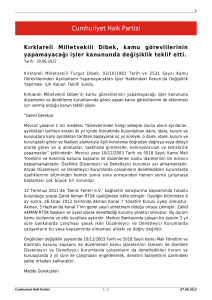
Şekil 1: Gerilim geri besleme kontrollü DA-DA alçaltan
dönüştürücü devresi
topoloji için devrenin durum denklemleri;
x& = A3 ⋅ x + B3 ⋅ E
1
−
A3 = CR
−1
L
1
C ,
0
(3)
0
B3 =
0
burada, x: x = [vc i L ]T biçiminde durum değişkenleri
vektörünü, E: giriş sinyalini, A1,2,3: durum geçiş matrislerini,
B1,2,3: sütun vektörlerini göstermektedir.
Gerilim kontrol işleminde, referans gerilime göre çıkış
geriliminin hatası bir PI denetleyici vasıtasıyla kontrol
sinyaline dönüştürülür.
DA-DA ALÇALTAN DÖNÜŞTÜRÜCÜDE
KARMAŞIK DAVRANIŞLAR
DA-DA alçaltan güç dönüştürücüsü basit ama anahtarlı bir
devre yapısına sahiptir. Bu basitçe devreler akım veya gerilim
geri beslemeli ya da akıllı ve melez denetleyiciler ile beraber
kullanılırlar. Şekil 1’de gerilim geri beslemeli denetleyici
kullanılan bir yapı görülmektedir. DA-DA alçaltan
dönüştürücünün modellenmesi
Şekil 1’de görülen devre anahtarların iletim ve kesim
durumuna göre üç farklı topoloji ve indüktans akımının
sürekli ve süreksiz olmasına göre iki farklı modda çalışabilir.
Bu topolojilerin her biri ve kontrol birimi için eşitlik1-5’deki
denklemler kolayca yazılabilir. Bu denklemler bir anahtarlama
periyodu için yazılır.
I. S anahtarının iletimde D diyotunun kesimde olduğu
topoloji için devrenin durum denklemleri;
(1)
x& = A1 ⋅ x + B1 ⋅ E
Vcon (t ) = PI ((Vc − Vref ))
(4)
Kontrol sinyali bir rampa sinyali ile karşılaştırılır, kontrol
sinyali ile rampa sinyalinin çakıştığı noktalara göre
anahtarlama sinyali elde edilir. Rampa sinyali eşitlik (5)’deki
gibi tanımlanabilir.
Vramp (t ) = VL + (Vu − VL ) ⋅ (
t
⋅ mod 1)
T
(5)
Burada, t: zamanı, T: seçilen anahtarlama periyodunu, VU:
rampa sinyalinin tepe değerini, VL: ise taban değerini gösterir.
Tipik olarak, Vcon (t)≤Vramp(t) olduğunda S anahtarı kapanır,
Vcon(t)>Vramp(t) olduğunda açılır.
Güç elektroniği devreleri, geleneksel olarak parça parça
anahtarlamalı modelleme, ortalama modelleme ve ayrık zaman
modelleme yöntemleri ile modellenebilirler. DA-DA alçaltan
dönüştürücünün sürekli ve süreksiz çalışmadaki modelleri de
bu yöntemler yardımıyla elde edilir.
1
1
0
− CR C
A1 =
, B1 = 1
1
L
−
0
L
II. S anahtarının kesimde D diyotunun iletimde olduğu
topoloji için devrenin durum denklemleri;
(2)
x& = A2 ⋅ x + B2 ⋅ E
•
Parça parça anahtarlamalı model: Eşitlik (1)-(3)’deki
durum denklemleri anahtarlama sinyaline bağlı olarak uygun
sıra ve süre ile geçerli olacak şekilde çözüm için kullanılır.
1
1
− CR C
0
A2 =
B2 =
,
1
0
−
0
L
III. S anahtarının kesimde D diyotunun iletimde olduğu
•
Ortalama Model: Bu yöntemde durum değişkenlerinin
anlık değerleri yerine ortalama değerleri durum değişkeni
olarak seçilir. Temel amaç, bir anahtarlama periyodu tümü
boyunca geçerli olacak ve doğrusal olmayan sistemlerde
kullanılan analiz yöntemlerinin kullanılabileceği tek bir model
elde etmektir. Modelin yavaş gelişen dinamikleri
tanımlayabilmesine karşın hızlı gelişen dinamikleri
tanımlayamaz.
•
Ayrık Zaman Yenilemeli Model: DA-DA alçaltan
dönüştürücü için x n +1 = f ( x n , d , U ) biçiminde, ayrık zaman
185
Fırat Üniversitesi-Elazığ
yenilemeli bir model elde edilebilir. Model bir anahtarlama
periyodu tümü boyunca geçerli olur ve sürekli ve süreksiz
çalışmalar için ayrı ayrı elde edilir. F(.) fonksiyonunu elde
etmek için iki yol izlenebilir. Bu yöntemlerden biricisi eşitlik
(1)-(3)’de verilen denklemler uygun zaman aralıkları için
analitik olarak çözüp f(.)’i elde etmektir. İkincisi seri açılımı
kullanılarak çözüme gitmektir [1,3]. Ayrık zaman yenilemeli
model örnekleme periyoduna bağlı olarak, hızlı gelişen
dinamikleri iyi tanımlar, elde edilmesi ortalama modele göre
daha zordur.
2.1.2. Alçaltan Dönüştürücünün Değişken Parametreler
Altında Çatallaşma Davranışının incelenmesi
Sistem davranışları belli parametrelerin değişimiyle ani
olarak anlamlı şekilde değişebilir ve birden fazla denge
noktasına sahip olabilir. Bu olay çatallaşma olarak adlandırılır
ve çatallaşma diyagramları ile incelenir. Çatallaşma
diyagramları, seçilen bir çatallaşma parametresinin değişimine
karşı sistem davranışının kalıcı hal değerlerinin çizdirilmesiyle
elde edilir.
DA-DA alçaltan dönüştürücüde giriş gerilimi ve kontrol
parametrelerindeki değişimine bağlı olarak periyot katlama
çatallaşması, kaotik davranış, yük direncindeki değişime bağlı
olarak
sınır
çakışma
çatallaşması
gözlemlenmiş
çatallaşmalardır. Sınır çakışması, yük direncinin değişimiyle
devrenin beklenmedik şekilde sürekli çalışmadan süreksiz
çalışmaya veya süreksiz çalışmadan sürekli çalışmaya
geçmesidir. Bu güç elektroniği devrelerinde karşılaşılan
yapısal değişim olarak kabul edilen bir olaydır.
Bu çalışmada yapılan incelemelerde, DA-DA alçaltan
dönüştürücünün sürekli çalışma durumu göz önüne alınmıştır.
İncelemelerde kullanılan parametreler ise E=22-33V,
L=20mH, C=47µF, R=22Ω, Vref=11V, Kp=9, KI=0.08 T=400
µsn, VL=3.8, VU=8.2V şeklinde alınmıştır.
2.1. DA-DA alçaltan dönüştürücüde karmaşıklık
DA-DA alçaltan dönüştürücüler periyot-1 çalışması
amaçlanarak tasarlanırlar. Kullanılan denetleyiciler çıkıştaki
akım veya gerilimi sabit tutmayı hedefler. Devrenin
anahtarlamalı olması ve kullanılan denetleyicilerden dolayı
hedeflenen davranışın dışında, periyot katlanması, sınır
çakışması, yarı kaotik ve kaotik davranışlar oluşur. Bu
davranışlar karmaşıklığın göstergesidir ve literatürde karmaşık
davranışlar olarak adlandırılırlar. Karmaşık davranışların
sebebi, sistemlerin iç parametrelerinde veya dış etkenlerinde
oluşan değişimlerdir. DA-DA alçaltan dönüştürücü
tasarlanırken, devrede karmaşık davranışların varlığı ve hangi
şartlar altında oluştuğunun incelenmesi gerekir. Gerek devre
elemanlarının güvenliği gerekse de beklenmedik çıkış
büyüklükleri ile karşılaşmamak için bu inceleme önemlidir.
Sistemlerde karmaşık davranışların varlığını incelenmek
için doğrusal olmayan sistemlerde kullanılan yöntemler
kullanılır. Bu yöntemlerin arasında bilgisayar benzetimleriyle
elde edilen veri ve grafiklerin kullanılması önemli bir yer
tutar. Karmaşık davranışların gözlemlenmesi iki kategorik
şart altında gerçekleştirilir: sabit ve değişken parametreler
altında gözlemleme yapılması.
•
2.1.1. Alçaltan dönüştürücünün sabit parametreler altında
zaman gelişim davranışının incelenmesi
Sabit parametreler altında inceleme yapılırken, devre
elemanlarına ilişkin parametrelerde bir değişiklik olmadığı
kabul edilir. Devre giriş gerilimi değiştirilerek devrenin zaman
davranışı incelenir.
Burada devrenin zaman davranışı örneklenmiş veriler ve
faz porteleri elde edilerek karmaşıklık incelemesi yapılmıştır.
• Örneklenmiş veri: parça parça anahtarlı model
kullanılarak farklı giriş değerleri için zaman davranışı sayısal
olarak elde edilir. Bu sayısal verilerin periyodik olarak belli
anlardaki değerleri örneklenmiş veri olarak seçilir ve elde
edilecek örüntülerle karmaşıklık incelenir. Şekil 1’deki devre
için bu şekilde elde edilen örüntüler şekil 2’de görülmektedir.
• Faz porteleri: Sürekli iletim modunda çalışan alçaltan DA
dönüştürücü ikinci dereceden bir sistem olduğundan faz
porteleri elde etmemiz mümkündür. Bir önceki incelemesinde
kullandığımız model yardımıyla devrenin durum değişkenleri
olan kondansatör gerilimi ve indüktans akımının zaman
davranışı verilerini elde edebiliriz. Bu veriler elde edilen faz
portesindeki davranış sistemlerin bilinen davranışlarıyla
karşılaştırılarak türü saptanabilir. Şekil 1’deki devrenin farklı
giriş gerilimlerindeki faz porteleri elde edilerek şekil 3’de
gösterilmiştir.
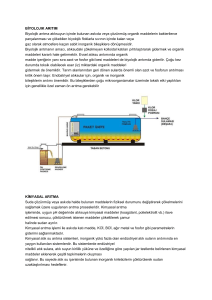
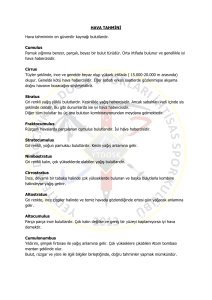
E=22V için elde edilen çıkış örneklenmiş verinin elde
edilmesi için referans sinyal ile kontrol sinyalinin
çakışmaları periyodik olarak alınmış ve çakışma
anlarından birisi (t=0.073sn) için elde edilen noktalar
grafiksel olarak gösterilmiştir. şekil 2a’daki örüntü
incelendiğinde,
verilerin tek bir nokta etrafında
yoğunlaştığı görülür. Bu periyot-1 çalışmanın gösterir.
Benzer şekilde E=26V için elde edilen Şekil 2b’deki
örüntüde örneklenmiş verilerin iki ayrı noktada ayrışması,
periyot-2 çalışmanın açık bir göstergesidir. Şekil 2c’deki
E=32.25V için elde edilen örüntü de ise örneklenmiş
verinin düzenli bir örüntüye sahip olmadığı rasgele ve
düzensiz olarak bir hat üzerinde dağıldığı izlenmektedir.
Buradan davranışın kaotik yörüngeye sahip olduğu
sonucuna varabiliriz.
örneklenmiş veri örüntüleri
12
E=22V
8
6
4
2
0
0.0725
0.073
0.0735
Örnek zaman (sn)
a)
12
10
örneklenmiş kontrol sinyali (V)
10
örneklenmiş kontrol sinyali (V)
örneklenmiş kontrol sinyali (V)
12
E=26V
8
6
4
2
0
0.0725
0.073
0.0735
Örnek zaman (sn)
b)
10
E=32.5V
8
6
4
2
0
0.0725
0.073
0.0735
Örnek zaman (sn)
c)
Şekil 2: Kontrol sinyalinin örneklenmiş veri örüntüleri,
a)E=22V, b)E=26V, c)E=32.25V için
•
186
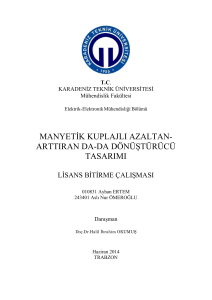
Şekil 3a’daki E=22V için elde edilen faz portesi
incelendiğinde sistem yörüngesinin bir limit çevrime
yakınsadığı görülmektedir. Bu da periyot-1 çalışma
manasındadır. Şekil 3b’deki E=26V için elde edilen faz
portesinde sistem yörüngesinin iki ayrı limit çevrim
arasında gidip geldiğini görebiliriz. Bu da periyot-2
çalışmayı yansıtmaktadır. Şekil 3c’deki E=32.25V için
elde edilen faz portesi incelendiğinde ise sistem
yörüngesinin, kapalı bir bölge içerisinde pek çok limit
Elektrik-Elektronik ve Bilgisayar Sempozyumu 2011
periyodu gibi etkenlere bağlıdır. Kazanların büyük seçilmesi
sistemi hızlandırmasına karşın karmaşık davranışların ortaya
çıkmasına neden olur. Küçük seçilmesi ise sistemin
yakınsamasını geciktirir, buna karşın karmaşıklığa neden
olmaz.
Önerilen denetleyici ile amaçlanan, kontrol sinyali kazanç
oranları ayarlanabilir bir denetleyici vasıtasıyla elde etmektir.
Gri sistem teorisinin kapsadığı ana konulardan birisi,
değişkenler arasında kabul edilebilir doğrulukta matematiksel
bir ilişki aramaktır. Eksikte olsa mevcut veriler daima bir
bütünü temsil eder ve dolaylı olarak yönetim kurallarını
içerirler. Bu kuralları açığa çıkarmak için işaret işleme
yöntemleriyle gri dizilerin rastgeleliği zayıflatılabilir, bu
işleme dizi üretimi de denir. Gri modellemede daha çok
birikim üretme işlemi (BÜİ), ters birikim üretme işlemi
(TBÜİ) ve ortalama üretme işlemi kullanılır.
Gri sistemlerin modellenmesinde kullanılan gri modeller
en genel olarak GM(M,N) şeklinde ifade edilir. Bu ifadede,
GM, gri modeli, M, modelin derecesini, N değişken sayısını
gösterir.
Önerilen gri denetleyicinin blok diyagramı şekil 5’de
görülmektedir. Tahminci olarak GM(2,1) olarak ifade edilen
gri verlust modeli, kontrolcü olarak ise GM(0,1)olarak ifade
edilen durağan model kullanılmıştır.
çevrim arasında gidip geldiğini görebiliriz. Bu da kaotik
çalışmanın göstergesidir.
Faz porteleri
İndüktans akımı (A)
0.65
0.6
E=22V
0.55
0.5
0.45
11.64
11.66
11.68
11.7
11.72
11.74
11.76
Çıkış gerilimi (V)
a)
İndüktans akımı (A)
0.65
0.6
E=26V
0.55
0.5
0.45
11.6
11.65
11.7
11.75
b)
11.8
11.85
11.9
Çıkış gerilimi (V)
İndüktans akımı (A)
1
0.8
E=32.5V
0.6
0.4
0.2
11.4
11.6
11.8
c)
12
12.2
12.4
Çıkış gerilimi (V)
Şekil 3: Faz porteleri, a)E=22 V, b)E=26V, c)E=32.25V için
•
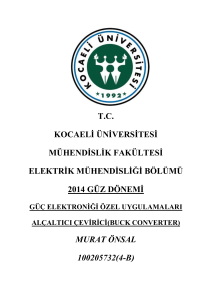
Şekil 1’deki devre için giriş gerilimi çatallaşma
parametresi olarak seçilerek elde edilen şekil 4’deki
çatallaşma diyagramından da görüldüğü gibi, E=26V için
denge noktaları iki kola ayrılmış, yani periyot-2 çalışma
oluşmuştur. E=32.5V içinse denge noktaları dağınık pek
çok nokta haline gelmiş yani kaotik davranış başlamıştır.
Şekil 5:Gri denetleyicili DA-DA alçaltan dönüştürücünün blok
diyagramı
Çıkış zamanla doyuma ulaşan bir gerilim sinyali
olduğundan tahminci olarak bu gri verlust model seçilmiştir.
Kontrol sinyali birisi hataya bağımlı diğeri hatadan
bağımsız iki parçalı bir sinyal olarak kabul edilerek GM(0,1)
durağan gri model ile elde edilmektedir. GM(0,1), PI
denetleyiciye benzer bir rol üstlenir. Ancak kazanç katsayıları
her döngüde yenilenir.
Tahminci algoritması aşağıdaki gibi verilir.
1. Adım: Çıkıştan alınacak veriler ile ham veri dizisi
oluşturulur. Bu çalışmada dört elemanlı bir dizi kullanılmıştır.
Algoritmanın her adımında yeni gelen veri diziye eklenir en
eski veri diziden atılır. Gri verlust modelde ham veri dizisi 1BÜİ uygulanmış dizi olarak alınır.
0.8
örneklenmiş iL (A)
0.7
0.6
0.5
x (1) = ( x (1) (1), x (1) (2),K x (1) (n))
(6)
2. Adım: x(1) dizisine 1-TBÜİ uygulanarak x(0) ve ortalama
üretme uygulanarak z(1) dizileri oluşturulur.
0.4
22
24
26
28
E (V)
30
32
x (0) (k + 1) = x (1) (k + 1) − x (1) (k )
Şekil 4:DA-DA alçaltan dönüştürücünün sürekli çalışma için
çatallaşma diyagram
3.
(
)
(7)
z (k + 1) = 0.5 x (k + 1) + x (k )
(8)
Eşitlik 7 ve 8’deki denklemler için x(0)(1)=x(1)(1) ve
z(1)(1)=x(1)(1) olarak alınır.
3. Adım: Eşitlik 9 yardımıyla modele ilişkin katsayılar
hesaplanır.
(1)
ÖNERİLEN GRİ DENETLEYİCİ YAPISI
DA-DA dönüştürücüler çoğunlukla akım veya gerilim geri
beslemeli oransal bir denetleyici yardımı ile oluşturulan PWM
sinyaller yardımıyla denetlenirler. Denetleyicinin başarısı
seçilen denetleyici kazançları, taşıyıcı sinyal, anahtarlama
[a
187
(1)
b ]T = [ B T B]−1 B T Y
(1)
(9)
Fırat Üniversitesi-Elazığ
alınarak benzetim çalıştırıldı. PI denetleyicinin kazanç
değerlerinin büyük seçmek çıkışın daha hızlı kalıcı hale
gelmesini sağlamaktadır. Buna karşın kalıcı hal sinyalinde
periyot kalmama gibi karmaşık davranışlar ortaya çıkmaktadır.
periyot-1
çalışma
amaçlanır.
Halbuki
− z (1) (2) [ z (1) (2)]2
x ( 0) (2)
(1)
( 0)
2
(1)
− z (3) [ z (3)]
x (3)
B =
,
Y
=
L
L
L
(1)
(1)
2
x ( 0) (n)
− z (n) [ z (n)]
4. Adım: Gri verlust modele ilişkin beyazlatma denkleminin
çözümü eşitlik 10’daki gibi tanımlanır. Bu denklem
yardımıyla çıkış geriliminin bir sonraki değeri tahmin edilir.
Çıkış gerilimi (volt)
ax (1) (1)
xˆ (1) (k + 1) =
15
(10)
bx (1) (1) + [a − bx (1) (1)]e a ( k +1)
Kontrolcü algoritması;
1. Adım: Referans gerilim Vref değerinden çıkış geriliminden
alınan verilerin çıkarılmasıyla bir ham veri dizisi elde edilir.
İlk döngü için modelin katsayıları olan v ve d katsayıları için
birer başlangıç değeri seçilir.
10
çıkış gerilimi
5
referans gerilim
0
0
0.005
0.01
0.015
0.02
Çıkış gerilimi (volt)
referans gerilim
0.005
0.01
0.015
0.02
0.025
0.03
0.035
İndüktans akımı (A)
(1)
⋅ BT ⋅ y
0.05
1
PI denetleyici
0.8
0.6
0.4
0.2
0
(15)
0
İndüktans akımı (A)
u (1) (2)
e (1) (2)
1
(1)
(1)
e (3)
2
u (3) ve p̂ = vˆ
B =
,
y
=
ˆ
M
M
M
d
u (1) ( N )
e (1) ( N ) N − 1
(1)
5. Adım: Tahminci çıkışından alınan x̂ (k+1),Vref, ve eşitlik
(15)’den elde edilen v̂ ve d̂ değerleri kullanılarak kontrol
sinyalinin bir sonraki değeri u(k+1) hesaplanır.
u ( k + 1) = vˆ ⋅ xˆ (1) (k + 1) − Vref + dˆ − u (1) (k )
(16)
0.005
0.01
0.015
0.02
0.025
0.03
0.035
1
0.04
0.045
0.05
Zaman (sn)
Gri denetleyici
0.8
0.6
0.4
0.2
0
0
0.005
0.01
0.015
0.02
0.025
0.03
b)
) ]
0.035
0.04
0.045
0.05
Zaman (sn)
Şekil 7: İndüktans akımının zaman davranışı a) PI denetleyici
için, b) Gri denetleyici için
Elde edilen u(k+1) değeri kontrol verisi olarak PWM girişine
uygulanırken, v̂ , d̂ ve çıkış sinyalinden alınan son 3 veri
kullanılmak üzere algoritmalara geri döndürülür ve bir sonraki
döngünün başlangıç değerleri olarak alınırlar.
4.
0.045
Zaman (sn)
a)
[ (
0.04
Şekil 6: Çıkış geriliminin zaman davranışı a) PI
denetleyici için, b) Gri denetleyici için
(13)
u ( x, k ) = v ⋅ e ( k ) + d ( k )
(14)
4. Adım: Eşitlik (15) yardımıyla v ve d değerleri yeniden
hesaplanır.
−1
0.05
çıkış gerilimi
5
b)
3. Adım: Eşitlik (14) ile kontrol sinyali dizisinin 1-BÜİ’li
değerler dizisi u(1) hesaplanır.
)
0.045
Zaman (sn)
Gri denetleyici
0
Burada e(1) (1)=e(0)(1) ve d(1)(1)=d alınır.
(
0.04
0
(12)
d (1) (k ) = k ⋅ d
pˆ = BT ⋅ B
0.035
10
i =1
(1)
0.03
15
k
(1)
0.025
a)
e (0) = (e (0) (1), e ( 0) (2),K e ( 0) (n))
(11)
2. Adım: Eşitlik (12)ve (13) yardımıyla e(0) ham veri dizisine
1-BÜİ uygulanarak e(1) ve d(1) dizileri elde edilir.
e (1) (k ) = ∑ e (0) (i)
PI denetleyici
Şekil 6a’da PI denetleyici ile çalıştırılan DA-DA
dönüştürücünün
çıkış
geriliminin
zaman
davranışı
görülmektedir. Şekil 7a’de çıkış gerilimin yaklaşık 0.02 sn
gecikmeyle kalıcı hale geldiği görülmektedir. Buna karşın
şekil 6b’deki gri denetleyicili DA-DA dönüştürücünün çıkış
geriliminin zaman davranışından bu gecikmenin yaklaşık
0.01sn’ye ye indiği görülebilir. Şekil 7a’da PI denetleyicili,
şekil 7b’de ise gri denetleyicili DA-DA dönüştürücüde
indüktans akımının zaman davranışları görülmektedir. Benzer
bir sonuca akım davranışlarından da gözlenmektedir.
BENZETİM SONUÇLARI
DA-DA alçaltan dönüştürücünün gri denetleyici ile
denetimini için şekil 5’de görülen blok diyagramına uygun
olarak matlab/simulink ortamında benzetimi gerçekleştirildi.
Bu modelden alınan sonuçlar PI denetleyicili DA-DA alçaltan
dönüştürücü sonuçları ile karşılaştırıldı. Çıkış gerilimi ve
indüktans akımlarının zaman davranışları kalıcı hale ulaşma
zamanları bakımından karşılaştırıldı.
Benzetimde bölüm 2’de verilen devre parametreleri
kullanıldı. Gri denetleyicideki v ve d parametreleri için
başlangıç değerleri PI denetleyicinin kazanç değerleriyle özdeş
5.
SONUÇLAR
Gri sistem teorisi tanımlanması ve modellenmesi zor olan
özellikle hakkında yeterli bilgiye sahip olmadığımız
188
Elektrik-Elektronik ve Bilgisayar Sempozyumu 2011
sistemlerde rahatça kullanabileceğimiz araçlar sunar. DA-DA
dönüştürücünün davranışını etkileyen yükün, giriş sinyalinin
değişimesi gibi pekçok etken vardır. Bunların bir kısmı
tarafımızdan kolayca tespit edilebilir, bir kısmını ise tespit
etmek maliyetlidir.
Bu çalışmada, oldukça az veri kullanılarak DA-DA
alçaltan dönüştürücünün denetimini gerçekleştiren bir yapı
sunulmuştur. Melez yöntemlere göre eksiklikleri olmasına
karşın klasik yönteme göre daha iyi sonuç verdiği açıktır.
Gerçek zamanlı uygulamalara çok uygun olan basit yapısı ve
az maliyetli olması avantajlarından birisidir. Denetin
yöntemlerindeen fazla göz önüne alınan kriterlerden birisi ise
anahtarlama sinyalinin hesaplanma zamanıdır. Basit yapısı ve
az veri kullanımın bu kriter bakımından avantaj sağlamaktadır.
Daha sonraki çalışmalarda, yöntem geliştirilerek, kalıcı hal
hatası, gerilim titreşimleri, indüktans akımı sınırlaması, görev
periyodu sınırlaması gibi ölçütler yönündende iyileştirilerek
deneysel olarak sonuçlar sunulacaktır.
6.
[6] Dai, D., Ma, Y., Tse, C. K., Ma, X., “Existence of
Horseshoe Maps in Current-Mode Controlled BuckBoost Dc/Dc Converters”, Chaos, Solitons and Fractals
25, s: 549–556. , 2005.
[7] Maity, S., Bhattacharya, T. K. and Banerjee, S.,
“Experimental Study of Chaos and Bifurcation in the
Buck Converter”, National Conference on Nonlinear
Systems & Dynamics, Indian Institute of Technology, 2426 February, 2005.
[8] Martinez, S.,
Gomez, M. and Castiblanco, O.,
“Evaluation of a Neural Control with Optimal
Architecture for a DC/DC Converter”, The 2010
International Power Electronics Conference, s:978-14244-5393, 2010 IEEE
[9] Mayo-Maldonado, J. C., Salas-Cabrera, R., CisnerosVillegas, H., Gomez-Garcia, M., Salas-Cabrera, E. N.,
Castillo-Gutierrez, R. and Ruiz-Martinez, O., “Modeling
and Control of a DC-DC Multilevel Boost Converter”,
Proceedings of the World Congress on Engineering and
Computer Science 2010 (WCECS 2010), B: II, October
20-22, San Francisco, USA, 2010.
[10] Alm´er, S., Mari´ethoz, S. and Morari, M., “Piecewise
Affine Modeling and Control of a Step-Up DC-DC
Converter”, 2010 American Control Conference, June
30-July 02, USA, 2010.
[11] Liu, S. ve Lin, Y., Grey Information: Theory and
Practical Applications, Springer, London, 2006.
[12] Kayacan, E. ve Kaynak, O., “An Adaptive Grey PIDType Fuzzy Controller Design For A Non -Linear Liquid
Level System” Transactions of the Institute of
Measurement and Control, cilt:31, s:33-49, 2009.
[13] Xia, C., Cao, W. ve Song, P., “The Speed-Adjustment
System of Brushless DC Motor Based on Grey PID”,
Proceedings of the IEEE international Conference on
Automation and Logistics, s:35-38, 2008.
[14] Saman M., Karaköse M., Akın E., “Asenkron motorların
vektör kontrolünde gri sistem tabanlı akı tahmini”, 2011
IEEE 19th Signal Processing and Communications
Applications Conference (SIU 2011), Antalya, 2011.
KAYNAKLAR
[1] Tse, C. K. and Bernardo, M. D., “Complex Behavior in
Switching Power Converters”, Proceedings of The IEEE,
Vol. 90, No. 5, May 2002.
[2] Chen, J. J., Hwang, B. H., Kung, C. M., Tai, W. Y.,
Hwang, Y. S., “A New Single-Inductor Quadratic Buck
Converter Using Average-Current-Mode Control Without
Slope-Compensation”, 5thIEEE Conference on Industrial
Electronics and Applicationsis, s:1082-1087, 2010.
[3] Tse, C. K., Complex Behavior of Switching Power
Converters, CRP Press LC, LONDON, 2004.
[4] Verghes, G. C. and Banerjee, S., Nonlinear Phenomena
in Power Electronics; A attractors, Bifurcations, Chaos,
and Nonlinear Control, Wiley, USA 2001.
[5] Mariéthoz, S., Almér, S., Bâja, M., Beccuti, A. G.,
Patino, D., Wernrud, A., Buisson, J., Cormerais, H.,
Geyer, T., Fujioka, H., Jönsson, U. T., Kao, C. Y.,
Morari, M., Papafotiou, G., Rantzer, A. and Riedinger,
P. “Comparison of Hybrid Control Techniques for Buck
and Boost DC-DC Converters”, IEEE Transactions on
Control Systems Technology, Vol. 18, No. 5, September
2010.
189