OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
ÖZEL ELEKTRİK MOTORLARI
Bundan önce gördüğümüz asenkron ve doğru akım motorları endüstride standart işlemler için en çok kullanılan
motorlardır. Bir bant, vinç veya havalandırma motorlarının haricinde endüstride çok daha hassas uygulamalar için
kullanılan elektrik motorları da bulunmaktadır. Bunlar özel elektrik makineleri başlığı altında toplanarak en çok
kullanılanları hakkında bilgi bu ders notunda ele alınmıştır.
Asenkron motorların çalışma prensibini hatırlayacak olursak üç fazın gerilim dalga şekillerinin birbirine göre
değerleri ve eksi-artı alternans değişimleri sayesinde oluşan döner alanı takip eden rotor manyetik alanı dönme
hareketini gerçekleştirmekteydi. Özel elektrik motorları temelde konum kontrolüne dayanır. Bu nedenle dönme
momenti bir dizi bobin gruplarının yarı iletken anahtarlama elemanları ile sıralı anahtarlanmasıyla elde edilir.
STEP MOTORLAR:
Step motorun statoru, üzerine bobinlerin sarılı
olduğu elektro mıknatıs kutuplar dan oluşur.
Rotorda ise demir veya doğal mıknatıs çıkık
kutuplar vardır. Demir rotor kutupları ve stator
kutup nüveleri paketlenmiş sacdan imal edilir. Daha
önceki
bilgilerimizden
demirin
manyetik
geçirgenliğinin havaya göre 1500 ( den fazla ) kat
daha iyi olduğunu ve elektro mıknatısın manyetik
malzemeleri çektiğini tekrar hatırlayalım.
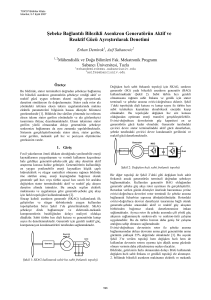
Aşağıdaki şekilde step motorun en temel hali ile
çalışma prensibi anlatılmıştır. Statordaki altı adet
kutup üzerine bobinler sarılmıştır. Bu bobinlerin
bağlantısı karşılıklı olarak N-S kutup çiftini
oluşturacak şekilde yapılmıştır. Rotor üzerinde ise
dört çıkık kutup bulunmaktadır.
A bobin çiftine enerji verildiğinde kendisine en yakın rotor çıkık kutbunu, kutup hizasına çekerek aynı eksene
getirecektir ( Örneğin 1-3 nolu rotor kutupları ). Rotor A kutup eksenine geldiğinde bu sefer B bobin çiftine enerji
O
verelim. Bu durumda 4-2 nolu rotor kutupları B kutup eksenine kadar çekilerek saat ibresi yönünde 30 lik bir
hareket elde edilecektir. B bobininden sonra C bobinine enerji verildiğinde bu sefer 3-1 nolu rotor kutupları bu sefer
C kutup eksenine doğru bir 30O lik daha hareket gerçekleştirecektir. C bobininden sonra tekrar A bobinine enerji
verilecek olursa bu sefer 2-4 rotor kutupları A kutup eksen hizasına gelecektir. Dikkat edilecek olursa A-B-C
bobinlerine sıralı enerji vererek rotorun 30 ar derecelik hareketi sağlanmaktadır. Bu anahtarlamaya devam edildiği
taktirde dönme hareketi gerçekleşmiş olacaktır. Eğer anahtarlama sırası C-B-A şeklinde tersten yapılacak olursa bu
seferde rotor ters yönde dönecektir.
Stator kutup sayısı her zaman için rotor kutup sayısından farklı olmak zorundadır aksi taktirde her stator kutbunun
altında bir rotor kutbu olacaktır sıralı anahtarlamada çekilecek bir kutup olmayacak ( zaten kutup altında ) ve
dönme hareketi gerçekleşmeyecektir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
1
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Rotorun dönmesi için içerisindeki bobin gruplarına sıralı enerji verilmesi step motorların sürücülerinin servo
motorların sürücülerinden daha basit olmasını sağlar. Ayrıca her anahtarlamada rotorun bilinen bir açıda hareketi
bu motorları açık döngü kontrole avantajlı hale getirmektedir.
Step motorlar rotor yapı tipine göre Değişen Relüktanslı ( Variable reluctance ) ve Hibrit ( Hybrid ) olarak iki tipe
ayrılır. Değişen relüktanslı motor rotoru sac paketi şeklindedir. Moment kutup manyetik alanının rotor kutbunu
çekmesi ile oluşur. İsmini kutuplar arasındaki manyetik alan geçirgenliğinin rotor kutuplarının stator kutup
ekseninde olmadan önce ve olduğu anda farklı olmasından alır. Burada kutup eksenleri aynı hizaya geldiğinde
manyetik geçirgenlik de en yüksek değerine ulaşmaktadır. 15O-30O-45O gibi büyük adım değerlerine sahiptir.
Rotoru sabit tutmak için en son anahtarlanan bobin gurubuna enerji verilmesi gerekir ve eğer herhangi bir nedenle
enerji kesilecek olursa rotor serbest kalacak ve konum kaybedecektir.
Hibrit motorlarda ise rotor kutupları sabit
mıknatıslardan oluşur. 1.8O-2,5O gibi küçük
adımlarda yapılırlar. Sabit mıknatıslı rotor, kutup
manyetik alanı ile birlikte momenti arttırır. Rotoru
sabit tutmak için yine en son anahtarlanan bobin
gurubuna enerji verilmesi gerekir fakat herhangi
bir nedenle enerji kesilecek olursa rotor
tamamen serbest kalmaz ve sabit mıknatısların
etkisi ile küçük kuvvetlerde konumunu korur.
Hibrit motorlarda adımlar çok küçüktür bu küçük
adımları sağlamak için aynı rotor mili üzerine
konmuş ve kutup hizaları birbirinden farklı birden
fazla sabit mıknatıs rotor kullanılır.
Şekildeki her bir rotor kutupları arasındaki açının
3.6O olduğunu kabul edelim eğer iki rotor
kutupları arasındaki açı 1.8O olacak şekilde
yerleştirilecek olursa 3.6O lik adım açısı yarıya
yani 1.8O dereceye düşecektir. Stator kutup
ayakları da 1.8O lik küçük kutup ayakları
şeklinde açılacaktır.
Stator kutup ayaklarındaki küçük kutuplar ile rotor kutupları
aynı genişlik ve açıya sahiptir. Fakat bir kutup altında aynı
eksene geldiklerinde diğer kutupların altında 1.8O lik açı farkı
oluşacaktır.
Yandaki şekil dikkatle incelecek olursa dikey kutup altında
stator ve rotor kutupları aynı eksene gelmişken bir yan
kutupta aralarında 1.8O lik bir fark olmaktadır. Eğer sırası ile
yan bobin enerjilenecek olursa bu durumda rotor sadece 1.8O
lik hareket ederek stator kutup ekseni ile aynı hizaya
gelecektir. Yani dönme hareketi 1.8O lik adımlar ile
gerçekleştirilecektir.
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
2
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Adımların daha kolay anlaşılması için bir an
stator ve rotor kutuplarını düzlemsel olarak
kabul edelim. 1. adımda 1-5 kutup çifti
enerjilidir ve rotor bu kutup ekseni
altındadır. Bu anda 2-6 kutup çifti ile rotor
kutupları arasında 1.8O lik bir fark vardır ve
2-6 kutup çifti 1-5 kutup çiftinden sonra
enerjilendiğinde rotor sağa doğru hareket
ederek bu kutup çifti eksenine gelecektir.
Rotorun her adımında bir sonraki stator
kutbu ile arasında devamlı 1.8O lik bir fark
olacak ve kutuplar sıralı enerjilendiğinde
rotor
1.8O lik adımlar halinde hareket
edecektir.
Step motorları kutup bobinlerine enerji uygulama şekline göre iki kutuplu ve tek kutuplu olarak ikiye ayırabiliriz.
Tek kutuplu ( Unipolar ) step motorun stator kutuplarında ikişer adet bobin bulunmaktadır. Her adımda bu
bobinlerden sadece birine gerilim uygulanır. Her bobin enerjilendiğinde bulunduğu kutbun manyetik alan yönünü
(N-S) değiştirir.
1. Adım
2. Adım
1. Adımda S1-1 ve S2-1 konumundadır. Anahtarlar bu konumda iken P ve R bobinleri enerjilidir ve bu durumda
kutupların manyetik alan yönleri ve rotor konumu görülmektedir. 2. Adımda S2 anahtarı sabit tutulup S1 anahtarı 2.
konuma alındığında bu sefer Q bobini enerjilerek bu kutbun manyetik alan yönünü değiştirecektir. Yeni durumda
rotor saat ibresi yönünde 45O lik adım atacaktır.
Bobinlere sıralı enerji verilmesi ve buna bağlı olarak rotor
konumunun değişimi yanda verilmiştir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
3
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Tek kutuplu motorlarda dikkat edilecek olursa stator kutuplarında iki adet bobin bulunmakta ve bu bobinlerden
sadece bir tanesi o an için enerjilenmektedir. Bu durum stator kutuplarının dolayısı ile motor hacminin büyümesine
neden olmaktadır.
Çift kutuplu ( Bipolar ) motorlarda ise her stator kutbu üzerinde bir adet bobin bulunmakta ve bu bobinin manyetik
alan yönünün değişimi (N-S) bobinden geçen akımın yönü değiştirilerek sağlanmaktadır.
1. Adım
2. Adım
1. Adımda S1 ve S2 anahtarları 1. konumundadır. Anahtarlar bu konumda iken P bobininden aşağıdan yukarı ve Q
bobininden soldan sağa doğru akım geçmektedir. Bu durumda kutupların manyetik alan yönleri ve rotor konumu
görülmektedir. 2. Adımda S1 anahtarı 2. konuma alınmış ve S2 anahtarı 1. konumda bırakılmıştır. Bu durumda P
bobininden geçen akımın yönü yukarıdan aşağı doğru değişmiştir. Değişen bu akım yönü bu kutbun manyetik alan
yönünü de değiştirmiştir. Yeni durumda rotor saat ibresi yönünde 45O lik adım atacaktır.
Çift kutuplu motorlarda kutupdaki bobinin her adımda kullanılması tek kutupluya göre kutup boyutlarının
küçülmesini sağlasa da bobinden geçen akımın yön değiştiriyor olması bu tip motorların anahtarlanmasını tek
kutupluya göre biraz daha teferruatlı olmasına neden olmaktadır.
Bobinlere sıralı enerji verilmesi ve buna bağlı olarak rotor
konumunun değişimi yanda verilmiştir.
3
Yukarıda anahtarlamanın anlatılması sırasında verilen
şekiller konunun anlaşılmasına yöneliktir, gerçekte
bobinlerin stator kutuplarına yerleşimi daha detaylıdır.
Yandaki şekilde verilen tek kutuplu ( Unipolar ) motorda
küçük adımlar ve yüksek moment elde etmek için bobinler
birden fazla kutup ayağına paylaştırılmıştır.
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
4
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Şekildeki step motorda eğer her
bobine sıralı enerji verilecek olursa
rotor sırası ile bu kutup eksenlerine
doğru 90 ar derecelik adımlar
gerçekleştirecektir.
Eğer aynı anda iki bobin enerjilenecek olursa örneğin D ve A bobinleri rotor bu iki kutup arasındaki 1 konumuna
gelecektir. Bir sonraki konumda eğer A bobininin enerjisi korunup D bobini yerine B bobinine enerji verilecek olursa
rotorun yeni konumu 2 olacaktır. Bu durumda da motar 90 ar derecelik adımlar atacaktır. Fakat aynı anda iki
bobininde enerjili olması daha yüksek bir moment sağlayacaktır. Eğer hem sıralı hemde çift bobine enerji vererek
anahtarlamayı beraber kullanacak olursak bu durumda 45 er derecelik yarım adımlar elde etmemiz mümkün
olacaktır. Şekilde önce A bobinine enerji verilmiştir bu durumda rotor konumu 1 dir. Ardından A-B bobinleri beraber
enerjilenmiştir ve rotor 2 konumuna gelmiştir. Eğer A bobininin enerjisi kesilip B bobini enerjili kalacak olursa
rotorun yeni konumu 3 olacaktır. Bu şekilde anahtarlamada unutulmaması gereken tek bobin enerjilendiğinde çift
bobine göre momentin düşük olacaktır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
5
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Mikro adım yönteminde step motor
sürücüsü stator kutuplarına farklı
değerlerde gerilimler ( Dolayısıyla
manyetik alan ) uygulayarak kutuplar
arası adımlar elde edilebilse de bu
işlemin karmaşıklığı sürücü maliyetinin
artışına neden olduğu için pek tercih
edilmez.
.
Rotor kutbu, enerjilenen stator kutbunun
eksenine doğru hareket eder bu hareket
sırasında
kazandığı
eylemsizlik
momentinden dolayı tam olarak stator
kutup ekseninde duramaz ve bir miktar
bu ekseni geçer. Daha sonra eksen
çizgisine gelmek için geri hareket ederek
bir salınım gerçekleştirir.
Motor mili yüklendikçe rotorun konumuna
gelme süresi uzayacak ve salınım
azalacaktır.
.
Eğer sürücü zamanlaması kutup
ekseni geçildiği anda bir sonraki kutup
enerjilenecek şekilde ayarlanacak
olursa rotor salınım yapmayacaktır.
Fakat anahtarlama süresi daha da
kısa olursa bu durumda rotor, stator
kutup hızını takip edemeyerek geride
kalır ve konum bilgisini kaybeder.
Duran bir step motorun milini sabit
tutarak, konum bilgisini kaybetmemesi
için ensonki stator kutupları enerjili
bırakılır.
.
Duran bir step motor eylemsizliğinden dolayı ilk anahtarlamada
çalışma hızına ulaşamaz. Bu nedenle step motorlar harekete
geçirilirken anahtarlama frekansı rampalı bir şekilde arttırılır. Yine
aynı şekilde dönen bir step motorun durdurulması içinde
anahtarlama frekansı rampalı bir şekilde azaltılmalıdır. Aksi taktirde
yüklü olan rotor mili durması gereken adımda duramayarak birkaç
adım daha hareketine devam edecektir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
6
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Her ne kadar stator kutuplarının anahtarlama sayısı ile rotor konumu hesaplanabilse de bu şekildeki açık kontrol
sistemlerinde yukarıda bahsi geçen konum bilgisinin kaybedilmesi durumlarına karşı geri döngü kontrol elamanı
olarak encoder kullanılarak kapalı döngü kontrol gerçekleştirilebilir. Yine ataleti yüksek yüklerin enerji kesildiğinde
tutulması ve konum koruması için step motorlar elektromanyetik frenli olarak imal edilebilirler.
Step motor sürücülerinde en az iki bilginin sürücü tarafından bilinmesi gerekir. Bunlardan birincisi anahtarlama
palsleridir ( Step ). Sürücü kendisine gelen her palste motor bobinlerini sırası ile anahtarlar. Bu bilgi aynı zamanda
anahtarlama frekansını yani motor hızını belirler. Adım bilgisi diğer bir PLC veya kontrol ünitesinden verilebileceği
gibi step motor sürücüsü üzerindeki osilatör veya sürücünün programlanması ile de verilebilir. Diğer bir bilgi yön (
Dir ) bilgisidir. Bunun için sürücü üzerinde bir dijital giriş ayrılmıştır. Eğer giriş “1” bir ise motor bir yönde, “0” sıfır ise
diğer yönde dönecektir.
.
Step motorun bobinlerinin anahtarlanması sırasında
bobinlerin endüktif özelliğinden dolayı ters indüksiyon
gerilimleri oluşacaktır. Eğer motorumuzu bir sürücü
üzerinden çalıştırıyorsak üretici şirket bunla ilgili tedbirleri
sürücü anahtarlama katında almıştır. Fakat motorumuzu
bir PLC veya mikroişlemcili kontrol ünitesi tarafından biz
süreceksek bobinlere serbest döngü diyotu bağlayarak
oluşan bu ters indüksiyon geriliminin yarı iletken
anahtarlama elemanlarına zarar vermesini engellememiz
gerekir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
7
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Küçük step motorların sürülmesinde kontrol katı bir frekans osilatörü ( Genellikle 555 entegreli ) ve bu osilatörün
çıkışındaki encoder devreden oluşmaktadır. Kontrol katının çıkışı motorun Çift veya Tek kutuplu olmasına göre yarı
iletken anahtarlama elemanlarını ( Genellikle transistör ) sırası ile iletime ve kesime götürür.
Tek kutuplu ( Unipolar )
Çoğunlukla kullanılan transistör iletim
- kesim noktalarında çalışacağı ve
üzerinde
bir
gerilim
düşümü
oluşturmayacağı için devrede ciddi bir
güç kaybına neden olmazlar. Bu tip
sürücülerde elde edilen çıkış gerilimi
kare
dalga
olup
yarı
iletken
elemanlara ters paralel serbest döngü
diyotları bağlanır.
Endüstriyel tip sürücülerde ise
düşünülmesi
gereken
bazı
parametreler vardır. Örneğin mil yükü
değiştiğinde momentin sabit kalması.
Rotor tepki süresi. Rotorun konumuna
göre
kutup
sargılarının
endüktansındaki değişim gibi.
Çift kutuplu ( Bipolar )
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
8
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
O nedenle bu tip sürücüler yüksek anahtarlama frekansına sahip yarı iletken elemanlar ile PWM moda ve akım
değerini kontrol edebilecek şekilde imal edilirler.
Step motorlarda dört çeşit
tork değeri bulunur.
a. Detent Torque
(Yüksüz ve Enerjisiz Tutma
Torku)
b. Holding Torque
(Yüksüz ve Enerjili Tutma
Torku)
c. Pull in Torque
(Kalkıstaki Maksimum Yük
Momenti)
d. Pull Out Torque
(Sürekli Rejimdeki
Maksimum Yük Momenti)
Step motor etiketinde verilen gerilim değeri, rotor hareketsiz iken tutma torkunun oluşturulması için son sargı ( veya
sargılara ) uygulanması gereken gerilim değeridir. Motorun sürülmesi sırasında bu gerilim değeri üzerine
çıkılmaması gerekir. Bu gerilimin sargı direncine bölümü bobin akımını verecektir.
Step motor uçlarında imalatçı şirketlerin çeşitli renk veya sayı kullandığı görülse de motorlar uç renk kodlarında
aşağıdaki genelleme yapılabilir.
Tek kutuplu ( Unipolar )
Adım 1
Adım 2
Adım 3
Adım 4
Siyah
Kırmızı
Mavi
Sarı
Beyaz
+
+
+
+
*Anahtarlama sırası ve potansiyeli
Turuncu
-
.
Çift kutuplu ( Bipolar )
Adım 1
Adım 2
Adım 3
Adım 4
Kırmızı
Mavi
Sarı
+
+
+
+
+
+
*Anahtarlama sırası ve potansiyeli
Turuncu
+
+
-
.
Eğer step motor uçları bilinmiyorsa öncelikle bağlantı tipi bulunmalıdır. Eğer
Adım - Açı 1 Tur İçin Toplam
motordan dışarıya 4 adet kablo çıkıyorsa bu motorumuzun Çift kutuplu ( Bipolar )
Adım Sayısı
olduğunu gösterir. Ölçü aleti ohm kademesi ile hangi iki ucun bir bobine ait
15O
24
olduğu bulunur. Bu bobinlerin giriş çıkışları ise ancak gerilim vererek denem yolu
7.5O
48
ile bulunabilir.
3.75O
96
Motordan 6 uç veya bazı durumlarda iki bobinin ortak ucu motor içerisinde
3.6O
100
birleştirilerek çıkarılmış ise 4 uç çıkıyorsa motor Tek kutuplu ( Unipolar ) dır. Ölçü
1.8O
200
aleti ile hangi 3 ucun aynı bobin grubuna ait olduğu bulunur.
0.9O
400
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
9
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Daha sonra bu üç uç arasında tekrar direnç ölçümü yapılarak ortak uç bulunur bobin giriş çıkışları ise yine gerilim
vererek denem yolu ile bulunabilir. Ölçü aletinin ölçümleri sırasında motor mili kesinlikle döndürülmemelidir.
Kutuplarda üretilecek gerilimler yanlış ölçmelere neden olabilir.
Aşağıda uygulamaya yönelik bir örnek verilmiştir.
Step motorun bağlı olduğu sonsuz vida step
motor döndükçe üzerindeki tablayı ve iş
parçasını ileri geri hareket ettirmektedir. Bu
hareket sırasında freze bıçağı ise iş parçasından
talaş kaldırmaktadır. Sonsuz vidanın adımı 2 mm
dir ve step motor 1.8O derecelik adımlar
gerçekleştirmektedir. Yani 1 turda 200 adım
atmaktadır.
Bu durumda adım başına düşen ilerleme miktarı 2/200 = 0.01 mm/adım dir. 1 cm ( 10 mm ) uzunluğunda talaş
kaldırma için motor 10/0.01 = 1000 adım gerçekleştirmek zorundadır. Yani step motor 1000 adım atacak ve
duracaktır. Parçanın yumuşak veya sert olmasına bağlı olsa da sistemin saniyede 0.02 mm lik bir hızda ilerlemesi
istensin. Bu durumda 0.02/0.01 = 2 yani motorun saniyede 2 adım atması gerekecektir. Bu durumda anahtarlama
frekansı 1000/2 = 500 msn olacaktır. Tezgah 1 cm ( 10 mm ) lik yolu 500 sn de alacaktır. Bu işlemin sonunda freze
bıçağı parça üzerinden kalkacak ve tezgahın başlangıç noktasına gelmesi gerekecektedir. Geri dönüşte zaman
kaybını engellemek için 200 adım/ saniye hızında çalışması istenebilir. Bu hızda anahtarlama frekansı 1000/2000 =
5 msn olacaktır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
10
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
LİNEER MOTORLAR:
Şimdiye kadar görmüş olduğumuz tüm motorlar dairesel ( açısal ) hareket yapmaktaydılar. Endüstride gerekli
olduğu taktirde bu dairesel hareketi doğrusal ( lineer ) harekete dönüştürmek için çeşitli sistemler kullanılmaktadır.
Vidalı mil, kramayer dişlisi, kayış-kasnak sistemleri ve pnömatik silindirleri bunlara örnek olarak verebiliriz.
Vidalı mil
Kramayer dişlisi
.
Kayış-Kasnak sistemi
Vidalı mil, kramayer dişlisi, kayış-kasnak sisteminde bir elektrik
motorundan
alınan dairesel hareket doğrusal
harekete
dönüştürülmektedir. Motorlu sistemlerde elde edilen hız yataklama
ve sürtünme sorunlarından dolayı 5m/s nin üzerine çok fazla
çıkamamaktadır. Kayış uzaması ( veya gevşemesi ) dişliler arası
boşluklar gibi nedenlerle bu sistemlerde yapılan konum kontrolü
yeterli hassasiyete sahip olamamaktadır. Pnömatik silindirlerde ise
sisteme basınçlı havada ilave olmaktadır. Konum kontrolü pahalı
Servo pnömatik sistemlerle sağlanmaktadır. Yüksek hızlı, konum
kontrolü yapılabilen doğrusal hareket gerektiren uygulamalarda
lineer motorlar kullanılmaktadır.
Lineer motoru yapı ve çalışma prensibi açısından bir servo
motorunun açılmış haline benzetebiliriz. Lineer motor çıkık elektro
mıknatıs kutuplardan oluşan rotor ( Forcer ) ve çıkık sabit mıknatıs
veya nüve kutuplardan oluşan stator kısımlarından oluşur.
Genellikle stator kutuplar gövdeye bağlanmıştır. Rotor kutuplar ise
lineer olarak yataklanmış olup stator kutuplar üzerinde hareket
etmektedir.
Hareket, rotor çıkık elektromıknatıs kutupların sıralı olarak
enerjilendirilmesi ve oluşan N-S kutuplarının stator çıkık sabit
mıknatıs veya nüve kutuplar tarafından çekilmesi ile sağlanır. 1
mikron hassasiyetinde hareket gerçekleştiren lineer motorlar
bulunmaktadır.
Pnömatik silindir
.
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
11
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Yüksek hassasiyete sahip bir lineer motorun
yapısı çalışma prensibine ait resimler aşağıda
verilmiştir. Bu motorun stator kutupları demir sac
nüveden oluşmaktadır. Rotor A ve B kutupları
arasındaki sabit mıknatıs ara parçanın görevi
manyetik alanı yönlendirerek enerji verilen kutup
üzerindeki manyetik
alanın
tek kısımda
yığılmasını sağlamaktır.
1. Konum
2. Konum
3. Konum
4. Konum
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
12
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Yukarıdaki lineer motor yapısı Bipolar Hibrit step motora çok benzemektedir. 1. konumda A bobinine + yönlü bir
enerji verildiği düşünülmüştür. Bu konumda A1 kutup eksenleri kendisine en yakın olan stator kutup eksenine
çekilmiştir. 2. konumda B bobinine + yönlü enerji verilmiş ve rotor sola doğru hareket ederek B2 kutup eksenleri
stator kutup eksenlerine gelmiştir. Bir sonraki adım için A bobinine – yönde enerji vererek hareketin devamlılığı
sağlanmıştır. Rotorun sağa hareketi için ise anahtarlama sırasının terse çevrilmesi yeterlidir.
Sürücü anahtarlama frekansları 40m/sn lik hızlara
müsaade etse de lineer yataklamada yaşanan sorunlar
nedeni ile lineer motorlarda hız 5-10m/sn değerlerinde
tutulmaktadır.
Elde edilen hareket lineerdir ve yük rotor üzerine
bağlanır. Rotorla birlikte hareket eden kabloların sorun
teşkil ettiği durumlarda rotor kısmı sabit tutularak stator
kısmı hareketli olacak şekilde yataklanabilir. Bu durumda
hareketli aksamın ağırlığının artması bir dezavantaj
oluşturacaktır. Rotor konumu manyetik ( Hall elemanlı )
veya optik encoderler ile bulunur. Stator boyunu teorik
olarak sınırlayan herhangi bir şey yoktur. Bu nedenle
imalatçılar müşterilerinin istekleri doğrusunda çok çeşitli
boylarda lineer motor imal edebilmektedir.
Lineer Motorların Enerji Komitasyonuna Göre Sınıflandırılması:
Fırçalı Lineer Motorlar:
Bu motorda elektromıknatıs bobinler stator buyunca dizilmiş
olup rotor sabit mıknatıslardan oluşur. Stator üzerindeki
bobinlerin uçları kollektörlere çıkarılmıştır. Enerji, rotorun
hareketi sırasında rotor üzerindeki fırçalar vasıtası ile sıralı bir
şekilde verilir. Bu mekanik aksam motor hızını düşürdüğü gibi
arıza riskini arttırmaktadır. Ayrıca bobinlerin motor boyunca
dizilmesi bu motorların maliyetini arttırmaktadır. Bu
dezavantajlarından dolayı kullanım alanı çok değildir.
Fırçasız Lineer Motorlar:
Bu motorlarda stator sabit mıknatıslı veya demir nüveli çıkık kutuplara sahiptir. Rotor üzerinde ise yine çıkık kutuplu
elektromıknatıs bobinler vardır. Gerek konum bilgisi gerekse de hangi rotor sargısına enerji verileceğinin tespiti için
geri dönüş elemanına ihtiyaç duyulur. Encoderden alınan konum ilgisine göre rotor bobinlerine yarı iletken
anahtarlama elemanları ile sırası ile enerji uygulanır. Stator boyu yani yol eklenerek, istenildiği kadar uzatılabilir.
Buna rağmen bobinlerin olduğu rotor değişmez. Yol için sınırlama rotor üzerindeki kabloların taşınma güçlüğü veya
encoder boyunun yeterli derecede uzatılamamasından kaynaklanır.
Fırçasız lineer motorların sürücüleri
step motor sürücülerine çok benzer.
Endüstriyel tip lineer motorlar
genellikle üç fazlı olarak imal edilirler
ve
bobinler
sıralı
enerjilenir.
Bobinlere enerjinin verilmesi üç farklı
anahtarlama
yöntemi
ile
gerçekleştirilir. Kare dalga gerilim
çıkış veren sürücüler en basit
sürücülerdir. Altı adımlı sürücüde
motor sargılarına iki farklı gerilim
seviyesi uygulanır. En ideal sürücü
çıkışı sinisoidal gerilim olup bu
sayede motorun daha az titreşimle
hareket etmesini sağlanır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
13
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Ayrıca motor sargıları daha az ısınacaktır. Fakat bu tip sürücülerde anahtarlama devresi diğerlerine göre daha
karmaşık ve maliyetli olmaktadır.
Lineer motorların kullanım alanlarındaki uygulama farklılıkları zamanla bu motorların yapısında bazı değişikliklere
gidilmesine neden olmuştur.
Yukarıda lineer motor çalışma prensibinin konusunda verilen yassı lineer motor haricinde Mil lineer motorlarda
bulunmaktadır.
Burada rotor mıknatıs dizisi bir milden
oluşmaktadır. Bu mil, etrafına bobinlerin
yerleştirildiği boru içerisinde yataklanarak
hareket etmektedir. Hareket duyarlılıkları
0.01mm civarındadır. Bobinlerin sıralı
enerjilenmesi ile mil rotor lineer hareket
gerçekleştirmektedir. Motor hareket boyunu
uzatmak için yan yana dizili bobin sayısı
arttırılmalıdır.
.
Hareket mil rotor ile sağlansa da bazı
uygulamalarda mil sabit tutularak bobinlerin
olduğu gövde hareket ettirilir.
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
14
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
“U” lineer motorlarda ise rotor karşılıklı bakan iki sabit mıknatıs stator
arasında hareket eder. Mıknatısların karşılıklı bakması kaçak akıyı
azalttığı için motor verimini ve momentini arttırır. Rotor bobinlerinin demir
nüvesiz oluşu rotorun hafiflemesine ve bu nedenle yüksek ivmelere
imkan vermektedir.
.
Lineer
motorlarda
kullanılan
encoderler artımsal encoderlerdir.
Herhangi bir nedenle konum bilgisi
kaybedilecek olursa ( Örneğin enerji
kesilmesi ) motorun başlangıç
konumuna dönerek konum bilgisini
sıfırlaması
gerekmektedir.
Bu
nedenle lineer motor ( veya sistem )
üzerinde referans sensörü bulunur.
Konum bilgisi kaybolduğunda motor
sensör tarafına belirli bir hızda
hareket eder ve sensörü gördüğü
anda konum bilgisini sıfırlayarak
çalışmasını sürdürür.
Lineer motorların hassasiyeti, yüksek hızlarda çalışabilmesi motorlara avantaj sağlasa da gerek motor gerekse de
sürücü maliyeti ve düşey doğrultularda çalışmada yaşanan sorunlar ( Enerji kesilmesinde aşağı düşmesi ve
frenlenememesi ) motor için dez avantaj teşkil etmektedir.
Lineer Motor Uygulama Örnekleri:
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
15
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
16
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Manyetik Raylı Tren (Maglev):
Manyetik raylı trenler bir çeşit lineer motordur. Tren gövdesinin altında ve raylarda elektro mıknatıs bobinler
bulunur. Aynı adlı kutupların birbirini itmesi prensibi ile tren havaya kaldırılarak sürtünme en aza indirilmektedir.
Yine farklı adlı kutupların birbirini çekmesi prensibi ile de trenin ileri veya geri yönde hareketi sağlanmaktadır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
17
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
ANAHTARLAMALI RELÜKTANS MOTORLAR – ARM ( DEĞİŞEN RELÜKTANS MOTOR - DRM )
( VARIABLE RELUCTANCE MOTOR – VRM ):
Yapı ve çalışma prensibi olarak step motorlara çok
benzerler. Stator ve rotoru çıkık kutupludur ve sac
paketlerinden
oluşur.
Rotorda
sabit
mıknatıs
kullanılmaz. Her bir faza ait stator sargıları karşılıklı
kutuplar üzerine sarılı olup seri bağlanmıştır. Stator
sargılarına tek yönlü ve sıralı olarak akım verilir. Stator
sargılarına akım verildikçe kendisine en yakın rotor çıkık
kutbunu kendi kutup eksenine çekerek dönme hareketini
sağlar. Devir yönünü değiştirmek için anahtarlama
sırasını terse çevirmek yeterlidir. Relüktans motorun
adım açıları step motorlara oranla oldukça büyüktür.
Zaten relüktans motorların kullanılma nedeni konum
kontrolü için değildir. Relüktans motorlar kendi anma
devirlerinde ( Senkron devir ) çalıştırılırlar.
Relüktans motorun bir asenkron motor yerine kullanılmasının en büyük nedeni aynı boyuttaki bir asenkron motora
oranla daha büyük güçler ve döndürme momenti elde edilebiliyor olmasıdır. Ayrıca sargılarının sıralı anahtarlanıyor
olması ve akımın yön değiştirmemesi sürücü açısından da avantajlar sağlamaktadır.
Asenkron motoru sürmek için kullanılacak sürücünün artı ve eksi alternans çıkış vermesi yani akımın yön
değiştirmesi sürücünün anahtarlama ve kontrol devrelerini relüktans motor sürücüsüne oranla daha karışık ve
maliyetli olmasına neden olmaktadır. Relüktans motorların diğer avantajlarını şu şekilde sayabiliriz.; Yapısı basit
maliyeti düşüktür. Rotorun hafif oluşu rotor eylemsizliğini düşürmektedir. Yüksek momentler elde edilebilmektedir.
Yüksek devirlerde çalıştırılabilmektedirler. Sürücü ile devir ayarı yapmak mümkündür.
Bu avantajlarının yanı sıra relüktans motorların çalışırken çıkardıkları yüksek akustik ses gürültüsü bu motorlar için
dezavantaj teşkil etmektedir.
Ayrıca sıralı anahtarlamanın yapılabilmesi için rotor çıkık
kutbunun hangi stator kutbu altına geldiği bilinmesi
gerekmektedir bu nedenle mil konum bilgisini veren geri
dönüş elemanına, encodere gerek duyulur.
Bazı sürücülerde geri dönüş elemanı kullanmadan rotor
konum bilgisi elde edilebilir. Rotor çıkık kutbunun stator
çıkık kutbunun altına gelişi sırasında manyetik
geçirgenlik değişeceği için stator sargı endüktansı
dolayısıyla sargının çekeceği akımın dalga şekli
değişecektir. Bu özellikten yararlanarak sürücü fazlar
üzerindeki akım trafolarından aldığı motor akım bilgisine
göre rotor konumunu tayin edebilmekte ve sıralı
anahtarlamayı buna göre yapmaktadır.
Yüksek Relüktans
Düşük Relüktans
Düşük Empedans
MEHMET TOSUNER – KOCAELİ
Yüksek Empedans
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
18
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
SENKRON MOTOR – ALTERNATÖR :
Elektrik makineleri ders notunda asenkron motor stator sargılarına üç faz uygulandığında nasıl döner alanın
oluştuğunu görmüştük. Aynı zamanda bu döner manyetik alan rotor kısa devre çubuklarını kesmekte ve çubuklarda
endüklenen gerilim ile oluşan rotor kısa devre akımının oluşturduğu rotor manyetik alanın stator döner alanını takibi
ile rotor dönme hareketini gerçekleştirmekteydi. Kısa devre çubuklu asenkron motorlarda rotor manyetik alanı stator
manyetik alanı tarafından oluşturulduğu için rotor devri stator devrine eşit olduğunda rotor, stator manyetik alanı
tarafından kesilemeyecek ve indükleme olmayacaktır. Bundan dolayı rotor devri stator devrinden ( Senkron devir )
her zaman kayma miktarı kadar küçük olacaktır.
Rotor devrinin stator devrine eşit olabilmesi için (
ns=nr ) rotor manyetik alanının oluşumunun stator
manyetik alanından bağımsız hale getirilmesi gerekir.
Bunun için rotor ya sabit mıknatıstan oluşturulmalı
veya rotor manyetik alanı dışarıdan beslenen bir
elektro mıknatıs tarafından sağlanmalıdır. Senkron
motorlarda kayma oluşmaz ve rotor devri senkron
devre eşittir. Bu eşitlik motor yüklendikçe bozulmaz
ve kopma momentine kadar sağlanır. Kopma
momentinin aşılması ile motor mili durur.
Sabit mıknatıslı rotora sahip senkron motorlar daha
sonra tekrar döneceğiz.
Büyük güçlü senkron motorlarda rotor üzerine
açılan oluklara sargılar sarılır bu sargının iki ucu
rotor üzerindeki iki adet bileziğe çıkarılır ve bu
bileziklere basan iki adet fırça aracılığı ile rotor
sargısına sabit manyetik alan oluşturması için
doğru akım uygulanır. ( Uyartım akımı. )
.
Bilezik ve fırça düzeneği mekanik bir düzenektir,
bu nedenle bakım problemlerini arttırır sürtünme
dolayısıyla yükselen temas direnci kaybı arttırır ve
verimi düşürür.
Fırça ve bilezik düzeneğini ortadan kaldırmak için
geliştirilen fırçasız senkron motorlarda aynı milde (
Aynı gövdede ) yan yana iki makine bulunur.
.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
19
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Mil üzerinde rotor ile birlikte doğru akım makinesinin endüviside bulunmaktadır. Dış gövdede ise hem senkron
motorun stator sargıları hem de doğru akım makinesinin kutup sargıları vardır. Doğru akım makinesi bir dinamo gibi
çalışarak rotor sargılarına uygulanan gerilimi üretir. Gövde üzerinde olan ve uçları klamens kutusuna çıkarılan
Dinamo kutuplarına bir DC gerilim uygulandığında kutuplarda oluşan manyetik alan, içerisinde dönen endüvi
sargılarında bir gerilim indükler. İndüklenen bu gerilim her zaman AC dir. İndüklenen bu AC gerilim mil üzerinde mil
ile birlikte dönen diyotlardan geçirilerek doğrultulur ve rotor sargı uçlarına verilerek rotor sargılarında bir manyetik
alan oluşması sağlanır. Burada rotor sargılarına fırça ve bilezikler üzerinden gerilim verilmektense aynı gövde ve
mil üzerinde bulunan bir dinamoda gerilim üretilerek rotor sargıları beslenmiştir.
Senkron motorun sağlamış olduğu en büyük avantaj sabit devirdir. Fakat günümüzde yarı iletken teknolojisindeki
ilerleme ve fiyatlardaki düşme motor sürücülerinin kullanımını arttırmıştır. Bu nedenle senkron motorun yerini artık
motor sürücüsü ile birlikte kısa devre çubuklu asenkron motor almıştır. Fakat günümüzde hala alternatif gerilimin
üretilmesinde senkron makineler kullanılmaktadır. Eğer senkron motorun milini çevirecek ve rotor sargılarına bir
gerilim ( DC ) uygulayacak olursanız döner rotor manyetik alanı stator sargılarını kesecek ve stator sargılarında bir
gerilim indüklenecektir. Gerilim ürettiklerinde senkron motorlar Alternatör, Jenaratör veya Genaratör adını alırlar. (
bu isim çokluluğu çeşitli dillerden yapılan tercümeler sırasında ortaya çıkmış olup aynı makineyi işaret etmektedir. )
Alternatif akımın üretilmesinde sabit tutulması gereken iki değer
vardır. Periyot ( Frekans ) ve genlik.
ns = (60.f) / p formülünden de görüleceği üzere frekansın sabit
tutulabilmesi için alternatörün ayarlanan sabit bir devirde
döndürülmesi gerekir. Hidroelektrik santralde suyun debisi,
Termik santrallerde buharın basıncı, doğalgaz veya dizel
santrallerde yakıt miktarı sabit tutulmalıdır. Bu ise alternatör çıkış
frekansının devamlı ölçen ve buna göre çevirici makinenin devrini
sabit tutan elektromekanik regülatörler ile sağlanmaktadır.
Genliğin yani gerilimin sabit tutulması, frekansa göre daha
basittir. e = B . l . v . sinα formülünde indüklenen gerilimin
manyetik akı ve hıza bağlı olduğu görülmektedir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
20
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Hız frekanstan dolayı değiştirilemeyeceğine göre gerilimin sabit tutulması için manyetik akı ile oynanması
gerekmektedir. Bu ise fırçalı senkron alternatörlerde fırça-bilezik üzerinden rotor sargılara uygulanan gerilim
değiştirilerek, fırçasız senkron alternatörlerde ise doğru akım uyartım dinamosunun kutuplarına uygulanan gerilimin
değiştirilmesi ile sağlanır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
21
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
FIRÇASIZ DC MOTOR – SABİT MIKNATISLI AC MOTOR
DC motorlardaki fırça kolektör düzeneğinin motor için arıza kaynağı haline gelmesi ve bakım gerektirmesi,
Asenkron motor yapılarının basit oluşu ve ciddi bakımlar gerektirmemesi nedeni ile zamanla DC motorların yerini
AC motorlar almıştır. Asenkron motorların devir sayılarının ayarlanamaması sorunu AC sürücüler ile çözülmüş ve
bu sürücülerin maliyetleri de gün geçtikçe azalmıştır. Fakat moment karakteristiği açısından DC motorlar, Asenkron
motorlara göre hala üstünlüğünü korumaktadır. Asenkron motorların doğrusal olmayan moment-hız karakteristiği
bu motorların kontrollerini güçleştirmektedir. Yüke bağlı olan kayma miktarı bu motorların kontrolünde sürücünün
karmaşık matematiksel modelleme hesapları yapmasını gerektirmektedir.
Buna karşın DC
motorlarda moment-hız
karakteristiği doğrusaldır
ve karmaşık
matematiksel
modellemeler
gerektirmez.
DC motorlar moment-hız karakteristiği
AC motor moment-hız karakteristiği
DC motorlardaki moment-hız karakteristiğini koruyarak fırça ve kolektör düzeneğinden kurtulmak için yapılan
çalışmalar sonucunda Fırçasız DC motorlar geliştirilmiştir. Fırçasız DC motorda kutuplar sabit mıknatıstan yapılmış
olup motorun dönen kısmını yani rotoru oluşturmuştur. Motor sargıları ise dış yüzeyde, statordadır. Rotorun elektro
mıknatıstan değil de sabit mıknatıstan oluşması yani rotora enerji verilmemesi fırça ve kolektör düzeneğini ortadan
kaldırmıştır. Fakat bu durumda stator sargılarına ( Kutup sargıları da diyebiliriz. ) sabit bir DC gerilimin verilmesi
durumunda döner alan oluşmayacaktır. Döner alanın oluşması için daha önce gördüğümüz step veya relüktans
motorlarda olduğu gibi kutup sargılarının sıralı anahtarlanması gerekmektedir. Kutup sargılarının sarılı olduğu
stator iki tiptedir. Ya klasik DC fırçalı motorlarda olduğu gibi çıkık kutuplu yada Asenkron motorlarda olduğu gibi
oluklu. Çıkık kutuplu statora toplu sargılar sarılır.
Toplu sargıların işçiliği kolaydır. Bu tip statorlarda döner
alanın oluşması için en az üç çıkık kutba ihtiyaç duyulur.
Çoğunlukla üç bobin grubu ( Faz ) vardır ve bobinler çıkık
kutuplar üzerinde sarılı olup karşılıklı çıkık kutuplara sarılı
her bobin grubu seri bağlanır. Dağıtılmış sargıda ise yine
üç bobin grubu ( Faz ) vardır ve sargılar asenkron
motorlarda olduğu gibi stator oluklarına 120 şer derecelik
elektriki açı ile yerleştirilmiştir. İster dağıtılmış ister toplu
olsun bobin grupları yıldız veya üçgen bağlanarak motor
dışarısına 3 faz ucu olarak çıkarılır.
Toplu Sargı
.
Dağıtılmış Sargı
Her ne kadar rotor için sabit mıknatıslı olduğu söylense de rotor tamamen
sabit mıknatıstan yapılmaz. Çünkü sabit mıknatısın manyetik alan
geçirgenliği havaya yakındır yani manyetik alan geçirgenliği açısından
demire ( Saca ) göre oldukça kötüdür. Tamamen sabit mıknatıstan oluşacak
bir rotor, stator sargı endüktas değerinin düşmesine neden olacaktır. Bu
nedenle stator manyetik alanını kuvvetlendirmek için rotor sabit mıknatıs ve
silisli sacların çeşitli yapılarda beraber kullanılmasından oluşur. Sabit
mıknatıs olarak samaryum-kobalt veya neodyum-demir elementleri kullanılır.
İçe gömülü mıknatıs rotorların momenti yüzey yerleştirmeli mıknatıs rotorlara
oranla daha az titreşimli olmaktadır.
.
Yüzey yerleştirmeli mıknatıslar.
MEHMET TOSUNER – KOCAELİ
İçe gömülü mıknatıslar.
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
22
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Fırçasız DC motorların sürülmesinde iki farklı yöntem kullanılır bunlardan birincisi basit bir sürücü ile faz
sargılarının sıralı anahtarlanması ikincisi ise faz sargılarının sürücü üzerinden sinisoidal bir gerilimle beslenmesidir.
Sıralı anahtarlama hassas konum kontrolü gerektirmeyen uygulamalar içindir. Burada amaç fırçasız DC motoru
senkron hızında döndürmektir. Rotorun bir kutup altına çekilmesinden sonra bir diğer stator kutbunun
anahtarlanması gerekmektedir bunun için rotor kutbunun o an hangi stator kutbu altında olduğu bilgisine ihtiyaç
vardır. Bu basit konum bilgisi ya optik sensörler yada manyetik sensörler ile elde edilir. Optik sensör için ledfototransistörden oluşan basit bir optokuplör kullanılırken manyetik sensör olarak Hall elemanları kullanılır.
Hatırlatma:
Hall elemanı P veya N tipi yarı iletken bir malzemenin iki ucu arasından bir akım geçirilir
ve bu malzeme kendisine dik manyetik alana maruz kalırsa malzemenin diğer iki ucu
arasında bir potansiyel fark oluşur. Bu özellikten yararlanarak oluşturulan sensörler
manyetik alana maruz kaldığında ( rotor hall elemanına altına gelip rotor manyetik kuvvet
çizgileri hall elemanını etkilediğinde. ) çıkışlarından alınan potansiyel farkla rotor konum
bilgisini belirlenir.
Sıralı anahtarlamaya ait basit bir prensip devre aşağıda tek kutuplu bir sürücü olarak verilmiştir. Bu devrede FT1
foto transistorü ışık aldığında TR1 transistörünü, FT2 foto transistorü TR2 transistörünü ve FT3 foto transistorü TR3
transistörünü iletime geçirmektedir. Işık kaynağı ve foto transistor ler arasına konan ve mile akuple olarak dönen
parçalı disk foto transistorlerin rotor konumuna göre sıralı ışık almasını sağlamaktadır.
İlk başlangıçta Rotorun S kutbunun statorun P2 kutbu altında olduğunu düşünelim. Bu konumda FT1 Foto
transistörü ışık alır ve Tr1 transistörü iletime geçer. Tr1 transistörü U sargısından akım geçirir ve P1-S kutbu
rotorun N kutbunu ok yönünde çeker. Rotor N kutbu P1-S ile ayni hizaya geldiğinde mile bağlı döner disk FT1 i
kapatır ve FT2 nin ışık almasını sağlar bu sayede Tr2 transistoru iletime geçer ve V sargısından akım geçirir. Bu
sefer P2-S kutbu rotorun N kutbu ok yönünde çekerek P2-S ile aynı hizaya getirir. Bu konumda disk FT2 yi kapatır
ve FT3 ün ışık almasını sağlar. FT3 ise Tr3 i iletime ceçirerek P3-S kutbunu oluşturur. Yeni konumda Rotor N kutbu
yine ok yönünde hareketini sürdürür ve P3-S kutbunun altına gelir. Rotorun hareketi ile bu sıralı anahtarlama
devam edecektir. Dikkat edilecek olursa fırça ve kolektör düzeneğinin yapmış olduğu komitasyon olayı Fırcasız DC
motorlarda yarı iletken anahtarlama elemanları vasıtası ile mekaniki sürtünme olmadan elektronik olarak
yapılmıştır. Aşağıda optik sensörlerin konumuna bağlı olarak sargı akımları ve rotor konumu verilmiştir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
23
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Yandaki tek kutuplu sürücüye dikkat edecek
olursanız aynı anda sadece bir bobin
enerjilenmektedir. Yani her bobinin devrede
kalma süresi 1/3 dür. Her ne kadar konunun
anlaşılması açısından yukarıda örnek olarak
verilmiş olsa da bu tip sürücüler düşük
verimlerinden dolayı pratikte kullanılmazlar.
Fırçasız DC motorların sürülmesinde çift
kutuplu sürücüler kullanılır. Bu sürücülerde
aynı anda 2 bobin enerjilidir ve her bobinin
devrede kalma süresi 2/3 dür.
Çift kutuplu sürücüde motor sargıları yıldız veya üçgen olarak bağlanmış olup
motor dışına üç uç çıkarılmıştır. ( Çoğunlukla yıldız bağlantı yapılır. ) Bu
sürücüde 6 adet anahtarlama elemanı olup sıralı olarak ikişer bobin grubu
üzerinden akım geçirerek döner alan oluşturur. ( Bobinlerden birinden + yönlü
akım geçerken diğerinden – yönlü akım geçiyor.)
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
24
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
.
Bir
turluk
hareket
elde
edilebilmesi için sıralı olarak altı
adet anahtarlama yapılması
gerekmektedir. Yanda üç adet
konum sensörünün düşen ve
yükselen kenarlarında sırası ile
anahtarlanan
yarı
iletken
anahtarlama elemanları ve faz
akımları verilmiştir.
Fırçasız
DC
motordan
bahsedilirken
“Yamuk”
(
Trapezoidal ) zıt EMK tabiri
sıklıkla kullanılır.
Bu tabir şuradan gelmektedir:
Eğer
sıralı
anahtarlanan
Fırçasız DC motorun uçları
sürücüden çıkarılıp osilaskoba
bağlanacak olursa ve bu motor
başka bir makine tarafından
dönderilecek
olursa
motor
uçlarından alınan gerilimlerin (
Zit EMK ların ) dalga şekilleri
aşağıdaki gibi olacaktır.
Zıt EMK grafiğine dikkat edilecek olursa rotor sabit mıknatıs ( N ) kutbu, stator kutbuna yaklaştıkça fazlar arası
gerilim + yönde rampalı bir şekilde artmakta, rotor kutbunun stator kutbu altındaki hareketi sırasında sabit kalmakta
ve rotor kutbu stator kutbundan uzaklaştıkça fazlar arası gerilimde rampalı bir şekilde sıfıra düşmektedir. Stator
kutbuna diğer rotor sabit mıknatıs ( S ) kutbu, yaklaştıkça bu sefer gerilimin polaritesi ( Akım yönü )değişerek aynı
olay gerçekleşecektir. Zıt EMK ların grafik şekilleri sensörlerin konumlarının belirlenmesi ve anahtarlama
noktalarının belirlenmesi için önemlidir. Zıt EMK nın dalga şekli yamuk olduğu için sıralı anahtarlanan fırçasız DC
motorlara “Yamuk” ( Trapezoidal ) zıt EMK lı fırçasız DC motor da denir.
Bu motorların en büyük dezavantajı aşağıdaki şekilde de görüldüğü gibi momentin dalgalı oluşudur. Özellikle
titreşimli olan moment düşük devirlerde milindeki yük için sorunlara neden olabilir. Ayrıca sıralı anahtarlamalı
fırçasız DC motorlarda hassa konum kontrolü yapılamaz ve bu nedenle yüksek hassasiyet gerektiren servo
uygulamaları için elverişli değildir.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
25
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Bu dezavantajlara karşı özellikle
servo uygulamalar için geliştirilen
fırçasız DC motor ailesinden olan
Sabit mıknatıslı senkron motor veya
bazı kaynaklarda geçen adıyla sabit
mıknatıslı senkron AC motorlar vardır.
Bu motorların farkı stator sargılarının,
stator
oluklarında
asenkron
motorlarda olduğu gibi dağıtılmış
sargı olması ve faz sargılarının sürücü
tarafından sinisoidal gerilimler ile
beslenmesidir. PWM yöntemiyle sinüs
gerilim üretmek yüksek yetenekli
sürücü gerektirirken hassas konum
kontrolü için geri dönüş elemanı
olarak
resolver
veya
encoder
kullanımını zorunlu kılmaktadır. Ayrıca
sıralı anahtarlamalı fırçasız DC
motorlarda yaşanan titreşimli moment
sorunu sabit mıknatıslı senkron AC
motorlarda
sinisoidal
besleme
sayesinde minimuma indirilmiştir.
Her ne kadar sıralı anahtarlamalı fırçasız DC motor ( Yamuk zıt EMK lı fırçasız DC motor ) ve sabit mıknatıslı
senkron AC motor ( Sinisoidal zıt EMK lı fırçasız DC motor ), Fırçasız DC motor ailesinden olsalar da çevirilerde,
sıralı anahtarlamalı fırçasız DC motor genel olarak Fırçasız DC motor (Brushless DC Motor – BLDC ) adıyla
anılmaktadır. Senkron AC motordan ise sabit mıknatıslı senkron AC motor olarak bahsedilmektedir.
Sıralı anahtarlamalı fırçasız DC motor ile sabit mıknatıslı senkron AC motorun temelde ayrılan özellikleri şunlardır:
Sıralı anahtarlamalı fırçasız DC motor
Sıralı anahtarlama
Yamuk zıt EMK
Titreşimli moment
Genellikle çıkık kutuplu stator, toplu sargı
Genellikle yüzey yerleştirmeli mıknatıs rotor
Hassas konum kontrolü yok
Rotor konum bilgisi optik veya manyetik basit
sensörlerden alınıyor.
Sabit mıknatıslı senkron AC motor
Sinisoidal besleme gerilimi
Sinisoidal zıt EMK
Titreşimsiz moment
Genellikle oluklu stator, dağıtılmış sargı
Genellikle İçe gömülü mıknatıs rotor
Hassas konum kontrolü var
Rotor konum bilgisi yüksek çözünürlüklü resolver veya
encoderden alınıyor.
.
Yamuk zıt EMK
Sinisoidal zıt EMK
Fırçasız DC motorlar yüksek güç katsayısına sahiptirler. Rotor sargılarının olmayışı dolayısıyla rotor demir
kayıplarının olmaması bu motorların verimini arttırmıştır. Rotorun tamamen sac olmaması nedeniyle hafifleyen rotor
eylemsizlik momentinin artmasını sağlamıştır. Ayrıca eylemsizlik momentini arttırmak için rotor küçük çaplı ve uzun
imal edilir. Fırçasız DC motorlar aynı güçteki bir asenkron motora veya fırçalı DC motora oranla daha yüksek
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
26
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
momente ( Güce ) sahiptir. Bu ise motor boyutlarının küçülmesini sağlamıştır. Fırçasız DC motorlarda rotorun
senkron devirden kopma anındaki moment anma momentinin 1,5 katını bulur. Ayrıca bu motorların sargılarına
uygulanan gerilimin mile aktarımı sırasında geçen tepki süresi asenkron motorlara göre daha kısadır. ( Stator
sargılarına uygulanan gerilimin artışı veya azalışından sonra buna bağlı olarak motor mil momentindeki değişim
süresi.)
Aşağıda servo sistemlerde kullanılan sabit mıknatıslı senkron AC motor şekli verilmiştir.
Sıralı anahtarlamalı fırçasız DC motora en güzel örnek olarak bilgisayar fan ve disk sürücü motorları gösterilebilir.
Bu motorda yapı yukarıda bahsi geçen Fırçasız DC motordan biraz daha farklıdır. Kutuplar motor ortasındaki çıkık
kutuplu stator üzerine sarılmıştır. Rotor bu çıkık kutuplar etrafında serbestçe dönebilecek şekilde
yaltaklandırılmıştır. Rotorun, stator çıkık kutuplarına bakan yüzeyinde çok sayıda sabit mıknatıs bulunmaktadır.
Mıknatıs sayısının çokluğu motor momentini artırı. Rotor mıknatısları stator altına montaj edilmiş hall elemanlarını
etkiledikçe stator bobinleri yarı iletken anahtarlama elemanları sayesinde sıralı olarak anahtarlanacaktır.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
27
www.kumanda.org
Senkron Servo Motor – Sabit Mıknatıslı Rotorlu
OTOMASYON ATÖLYESİ DERS NOTLARI
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
28
OTOMASYON ATÖLYESİ DERS NOTLARI
www.kumanda.org
Diğer Özel Motorlar:
Hafifi Rotorlu Motorlar:
Bazı uygulamalarda motor sargılarına enerji verildiği anda rotor devrinin maksimum değere çıkması istenir. Bunun
sağlanabilmesi için motorun eylemsizlik momentinin çok düşük olması gerekir. Motor eylemsizliğini azaltmak için
rotorda demir aksamı kullanılmayarak rotor hafifletilir.
Disk motorlarda rotor sargıları sağlam hafif
bir karkas üzerine sarılmıştır. Bobin uçları
basit kolektörlere çıkarılmıştır. Bu
kolektörlere kömür fırçalar sürtmekte ve
komitasyon sağlanmaktadır.
.
Kabuk rotorlu motorlarda ise rotor sargıları
bir karkas üzerine sarılmıştır. Bu karkas
içerisinde demir nüve dışında ise sabit veya
elektromıknatıs bobinler bulunmaktadır.
Demir nüve kutupların manyetik alan
zayıflamasını engellemek içindir. Karkas
üzerindeki bobin uçları basit kolektörlere
çıkarılmıştır. Bu kolektörlere kömür fırçalar
sürtmekte ve komitasyon sağlanmaktadır.
Elektrik motorlarını gerilim türü, kutup tipi, komitasyonu gibi çeşitli kategorilere ayırmak mümkün. Aşağıda elektrik
motorları komitasyon çeşidine göre sınıflandırılmıştır.
Elektrik Motorları
Fırçasız Motorlar
Fırçalı Motorlar
DC Motor
Senkron AC motor
Rotoru Sargılı AC Motor
Fırçasız DC Motor
Yamuk Zıt EMK lı
Step Motor
Anahtarlamalı Relüktans Motor
Sinisoidal Zıt EMK lı
Elektrik makineleri ve bu ders notunda bir çok elektrik motorundan bahsedildi. Bu motorların sadece temel
özellikleri üzerinde durduk. Peki hangi uygulama için hangi motoru kullanacağız. Aslında bu sorunun cevabı uzun
zamanlı bir tecrübe ve pratik uygulama gerektirir. Ayrıca gerek elektrik motoru gerekse de motor sürücüsü
şirketlerinin ürünlerinin yakın takip edilmesi de gerekir.
Örneğin;
Şönt, seri veya kompunt DC motorlar; Forklift ve tramvay gibi taşıtlarda cer motor olarak kullanılmaktadırlar.
Rotoru sargılı AC motorlar ise çok büyük güçlerdeki kırıcı veya karıştırıcılarda tercih edilmektedirler.
Step motorlar; Basit ve yüksek hassasiyet istenmeyen açık döngü servo uygulamalarda kullanılmaktadır. Buna
örnek yazıcı veya diğer ofis makineleri, taşıma işlemi için kullanılan kartezyen veya scara robotlar ve basit sürme
işleri verilebilir.
Anahtarlamalı relüktans motorlar yüksek devirli ( 1200-10000 dev/dk gibi ) düşük güçlü fan ve pompa
uygulamalarında tercih edilir.
Fırçasız DC motorlardan Yamuk zıt EMK lı motorlar bilgisayar veya diğer elektronik cihazların fan ve disk
sürücülerinde ve yüksek moment gerektiren cer uygulamalarında kullanılırlar. Sinisoidal zıt EMK lı sabit mıknatıslı
senkron AC motorlar ise her türlü hassas servo uygulamalarında tercih edilirler.
MEHMET TOSUNER – KOCAELİ
ANADOLU TEKNİK TEKNİK VE ENDÜSTRİ MESLEK LİSESİ ELEKTRİK BÖLÜMÜ
29