ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
MİKRO-KANALLARDA PARÇACIK HAREKETİNİN MODELLENMESİ
Barbaros ÇETİN*, S. Doğan ÖNER*, M. Bülent ÖZER**, Besim BARANOĞLU***
*İ.D. Bilkent Üniversitesi Makina Mühendisliği Bölümü
Mikro-akışkanlar-dinamiği ve Çip-üstü-Laboratuvar Araştırma Grubu 06800 Çankaya, Ankara
[email protected], [email protected]
**TOBB-ETÜ Makine Mühendisliği Bölümü 06560 Söğütözü, Ankara, [email protected]
***Atılım Üniversitesi İmalat Mühendisliği Bölümü 06836 Gölbaşı, Ankara,
besim.baranoğ[email protected]
Özet: Mikro-akışkanlar-dinamiği (MAD) uygulamalarındaki en önemli bileşen mikro-kanallar içerisinde biyolojik
parçacıkların hareketinin manipüle edilmesidir. MAD platformlarının tasarlanabilmesinde mikro-kanal içerisindeki
değişik boyutlardaki ve değişik şekillerdeki parçacıkların hareketlerinin modellenmesi çok önemlidir. Parçacıkların
mikro-kanallarda manipüle edilmesinde kanal geometrisi ve akış kullanan pasif, hidrodinamik yöntemler ve parçacıklar
üzerine elektrik, akustik, manyetik ve/veya optik gibi harici bir kuvvet uygulayan aktif yöntemler mevcuttur. Parçacık
hareketi, parçacığın mikro-kanal içerisindeki akış alanı, elektrik alan, akustik alan, manyetik alan ve/veya optik alan ile
etkileşimi sonucu ortaya çıkmaktadır. MAD uygulamalarında parçacık hareketinin mikro-kanallarda modellenmesi için
temel olarak (i) Lagrange izleme yöntemi ve (ii) gerilim tensörü yöntemi kullanılmaktadır. Bu çalışmada mikro-kanallar
içerisinde hidrodinamik, dielektroforez ve akustik tabanlı parçacık hareketinin simülasyonuna yönelik Lagrange izleme
ve gerilim tensörü yöntemi hakkında bilgiler verilmekte ve bu yöntemlerle ile yapılan modelleme çalışmaları
anlatılmaktadır.
Anahtar Kelimler: Mikro-akışkanlar-dinamiği, Lagrange izleme yöntemi, gerilim tensörü yöntemi, Sınır Eleman
Yöntemi
MODELING PARTICLE FLOW IN MICRO-CHANNELS
Abstract: Manipulation of the biological particles is the main ingredient for many microfluidic applications. Modeling
of the motion of particles with different geometry and size motion inside micro-channels is crucial for the design of the
microfluidic platform. For the manipulation of particles, there are passive hydrodyanmic techniques which utilizes the
channel geometry and flow field as well as active techniques which utlizes and external force such as electric, acoustic,
mangnetic and/or optic. For microfluidic applications, there are two approaches to simulate the particle trajectories: (i)
Lagrange tracking method, (ii) stress tensor method. In this study, the Lagrange tracking method and stress tensor
method is discussed for the simulation of hydrodynamic, dielectrophoretic and acoustic particle manipulation and some
examples about the particle flow modeling have been demonstrated.
Keywords: Microfluidics, Lagrange tracking method, stress tensor method, Boundary Element Method
GİRİŞ
Mikro-akışkanlar-dinamiği (MAD) uygulamalarındaki en önemli bileşen mikro-kanallar içerisinde
biyolojik parçacıkların hareketinin kontrol edilmesidir. Parçacıkların mikro-kanallarda hareketinin kontrol
edilebilen sadece kanal geometrisi ve akış kullanan
pasif, hidrodinamik yöntemler olduğu gibi parçacıklar
üzerine elektrik, akustik, manyetik ve/veya optik gibi
harici bir kuvvet uygulayan aktif yöntemler de
mevcuttur (Çetin vd., 2014). MAD platformlarının
verimli bir şekilde tasarlanabilmesinde mikro-kanal
içerisinde değişik boyut ve şekillerdeki parçacıkların
hareketlerinin modellenmesi çok kritiktir. Parçacık
hareketi, parçacığın mikro-kanal içerisindeki akış
alanı, elektrik alan, akustik alan, manyetik alan
ve/veya optik alan ile etkileşimi sonucu ortaya
çıkmaktadır. MAD uygulamalarında parçacık hareketinin mikro-kanallarda modellenmesi için temel olarak
iki yaklaşım kullanılmaktadır (Çetin ve Li, 2011; Çetin
vd., 2017):
(i) Lagrange İzleme Yöntemi,
(ii) Gerilim Tensörü Yöntemi,
Lagrange İzleme Yöntemi (LİY)
LİY’nde parçacıkların akış alanı, elektrik alan veya
akustik alan üzerindeki etkisi ihmal edilerek; akış
alanı, elektrik ve/veya akustik alan belirlenmektedir.
Akış, elektrik ve/veya akustik alanın parçacık üzerindeki etkisi analitik denklemler kullanılarak hesaplanmaktadır. Parçacıkların sadece çizgisel hareketleri
dikkate alınarak, kanal içerisindeki dönme hareketi
ihmal edilmektedir. Parçacığın kanal içerisindeki
yörüngesini belirlemek için Newton’un ikinci kanunu
parçacık için yazılarak parçacık üzerindeki kuvvetler
literatürde tanımlı olan ifadelerle denklemin içerisine
yerleştirilmektedir. Bu noktada parçacık üzerine etki-
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
yen kuvvetlerin matematiksel bir denklem ile ifade
edilebiliyor olması gerekmektedir. Bu noktada akışın
parçacık üzerinde oluşturduğu sürükleme kuvvetinin
ifadesi için düşük Reynolds (Re) sayılarında geçerli
olan (mikro-kanal ölçüleri ve uygulamalardaki hızlar
düşünüldüğünde mikro-kanalardaki akış Stokes rejiminde olmaktadır) Stokes denklemi kullanılmaktadır.
Akış kuvvetine ilave olarak eğer parçacıklara etkiyen
harici kuvvetler varsa onların da ayrıca yazılması gerekmektedir. Genelde bazı belli parçacık geometrileri
için elektroforez, dielektroforez, akustik, manyetik ve
ataletsel MAD uygulamalarında ortaya çıkan Dean
sürükleme ve kaldırma kuvvetleri için böyle ifadeler
literatürde mevcuttur. Bu eşitliklerde, sadece belirli
bazı parçacık geometriler için elde edilebildiği ve
çıkartım sırasında sadece tek bir parçacıcığın sonsuz
bir akışkan içerisindeki hareketi göz önüne alındığı
için parçacık-parçacık ve parçacık-duvar etkileşimlerini ihmal edilmektedir. Bu kadar sınırlamalara
rağmen parçacık konsantrasyonun düşük ve parçacık
boyutunun kanal boyutuna oranla küçük olduğu birçok
farklı uygulama için LİY başarı ile dielektroforez
(DEP) (Kang vd., 2006; Kang vd., 2009; Çetin vd.,
2009; Çetin ve Li, 2009, 2010; Zeinali vd., 2015) ve
akustik (Çetin vd., 2014, 2016; Büyükkoçak vd., 2014)
uygulamalar için literatürde kullanılmıştır.
LİY en önemli avantajı yüksek bir hesaplama gücüne
ihtiyaç duymamasıdır. İstenilen alan değişkenleri (akış
alanı için hız ve basınç, elektrik alan için potansiyel
vb) parçacıksız bir şekilde çözüm alanı içerisinde elde
edildikten sonra parçacık hareketleri post-proses
sırasında hızlı bir şekilde elde edilebilmektedir. Bu
sebeple LİY, birçok farklı ölçüdeki ve başlangıç
noktaları farklı parçacık için (ancak unutulmamalıdır
ki her bir parçacık izole bir parçacık olarak, parçacıkparçacık etkilişimi ihmal edilerek modellenmektedir)
hızlıca elde edilebilmekte ve bu yönüyle istatiksel bir
analize de imkan vermektedir (Çetin vd., 2014;
Büyükkoçak vd., 2014). Yapılan çalışmalarda LİY’nin
parçacık-parçacık ve parçacık-duvat etkilerini de bir
ölçüye kadar hesaba katması için formülasyonlarda
ampririk bir düzeltme katsayısı kullanılanması
önerilmiştir (Kang vd., 2006; Kang vd., 2009; Çetin
vd., 2009; Çetin ve Li, 2009; Çetin ve Li, 2010; Zeinali
vd., 2015). Bu düzeltme katsayısı 0 ile 1.0 arasında
parçacığın boyutuna göre değişmektedir. Eğer parçacık boyutu kanal boyutuna göre küçük ve parçacık
konsantrasyonu düşük ise bu düzeltme katsayısı 1.0
olmaktadır. Parçacık boyutu kanal ölçülerine göre
büyük ve parçacık konsantrastonun yüksek olduğu
durumlarda bu katsayı sıfıra doğru yaklaşmaktadır.
Düzeltme katsayısının değeri kanal geometrisine,
debiye ve uygulanan harici alanın yoğunlupuna bağlıdır ve deneysel sonuç olmadan ön gorülebilmesi pek
mümkün değildir.
Gerilim Tensörü Yöntemi (GTY)
Bu yöntemde parçacıkların akış alanı üzerindeki
etkisini görebilmek için parçacıkların sıvı içerisindeki
mevcudiyetleri göz önüne alınarak alan değişkeni
çözülmektedir (akış uygulamalarında akış alanı,
dielektroforez uygulamalarında elektrik alan, akustik
uygulamalarda akustik alan). Parçacık üzerinde oluşan
toplam kuvvet parçacık yüzeyindeki gerilim tensörünün integrasyonu ile belirlenebilmektedir. Bu tür
simülasyonlar, simülasyon süresi olarak çok uzun
sürmekte ve özellikle 3-boyutlu simülasyonlara
literatürde çok az sayıda rastlanmaktadır. GTY yaklaşımı ile LİY’nde göz ardı edilen parçacık-duvar ve
parçacık-parçacık etkileşimleri modellenebilmektedir.
Aynı zamanda değişik geometriye sahip parçacıkların
modellenebilmesi mümkün olmakta ve parçacığın
kendi ağırlık merkezi etrafında yaptığı dönme hareketi
de başarılı ile modellenebilmektedir. Ancak sayısal
modellemeyi gerçekleştirmek bu problemler için
oldukça zordur. Genelde bu tip modellemelerde kullanılan yöntem sonlu elemanlar (FEM) ve sonlu hacimler (FVM) yöntemleridir. Ancak bu yöntemleri uygulamak mikro-kanal geometrisi ve parçacıkların boyutları nedeni ile bazı zorlukları da beraberinde getirmektedir. Hacim ayrıklaştırması yapan bu yöntemlerde
parçacık kanal içerisinde hareket ederken çok sayıda
tekrar-ayrıklaştırma işlemi yapmak gerekmektedir. Bu
sebeple çözüm bölgesinin ayrıklaştırmasına dayalı
olan yöntemler tekrar-ayrıklaştırma işleminin çok
sayıda tekrarlanması dolayısı ile hem hesaplama gücü
açısından pahalı olmakta hem de her tekrar-ayrıklaştırma basamağında, bazı interpolasyon algoritmalarının kullanım zorunluluğu yüzünden çözüm hassasiyetinin azalmasına neden olmaktadır. Bu noktada Sınır
Eleman Yöntemi (Boundary Element Method, BEM)
çok etkin bir alternatif oluşturmaktadır (Karakaya vd.,
2015; Çetin vd., 2017). Bu yönüyle kanal içerisinde
hareket eden parçacığın modellenmesinde hesaplama
olarak yük getiren tekrar-ayrıklaştırmaya ve aynı
zamanda parçacık hareket ederken çözüm bölgesi
içinde bir interpolasyon algoritmasına ihtiyaç duymamaktadır.
Bu çalışmada hidrodinamik ayırma, dielektroforez ve
akustik tabanlı parçacık manipülasyonuna yönelik LİY
ve GTY tabanlı parçacık hareketi modelleme örnekleri
incelenecektir.
Literatür Taraması
FEM ve FVM teknikleri ile parçacık hareketinin
modellenmesinde, hesaplama olarak yüklü olan tekrarayrıklaştırma işlemini hafifletmek adına fictitous
domain yöntemi (Glowinski vd., 2001, Shi vd., 2011)
ve immersed boundary (Kang 2013, 2014, 2015)
yöntemleri geliştirilmiştir. Bu yöntemler bir hareket
eden, bir de sabit ağ yapısından oluşmaktadır. Özellikle makro sistemlerde parçacıkların modellenmesi
için etkin bir şekilde kullanılmaktadırlar. Ancak bu
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
yöntemlerde genellikle parçacık-parçacık etkileşimi
kütle-yay şeklindeki bir temas modeli kullanılarak
yapılmaktadır. Çoklu fizik uygulamaları arasında DEP
tabanlı modellemeler öne çıkmaktadır. Literatürde
özellikle FEM kullanılarak yapılmış 2-boyutlu
çalışmalar mevcuttur. Bu çalışmalar COMSOL Multiphysics kullanılarak yapılmıştır. Bu çalışmalar daha
çok DC-DEP uygulamalarını kapsamakta (Ai vd.,
2009, 2010, 2011), AC-DEP ile çok az çalışma
bulunmaktadır (Ai vd., 2014, Hossan vd., 2014). Çoğu
çalışma tek parçacık hareketi içermekte, kullanılan
geometri sebebiyle duvar-parçacık etkileşimi çok
güçlü olmamaktadır (parçacık duvara çok yakın
hareket etmemektedir). İki ve üç parçacık etkileşiminin irdelendiği çalışmalar ise kanal içerisindeki
hareketten ziyade çok küçük bir çözüm alanı içerisindeki parçacık hareketini göstermektedir (Kang, 2013,
2014, 2015, Hossan vd. 2014, Ye vd., 2014).
Akustik uygulamalara dair çalışmalar çok yenidir. LİY
tabanlı çalışmalara son yıllarda rastlanmaktadır
(Büyükkoçak vd., 2014, Nama vd., 2015, Mao vd.,
2015, Çetin vd., 2016). Bu çalışmalar küresel
parçacıklar için yapılmıştır. Farklı şekillerdeki
parçacıklar ile ilgili çalışmalar 2015 yılında durağan
bir akışkan içerisinde parçacık oryantasyonunun
oluşan akustik kuvvetine etkisi şeklindedir (Miller vd.,
2013, Wijaya vd., 2015, Hahn vd., 2015, Garbin vd.,
2015). Bu çalışmalar arasından sadece Hahn vd.
(2015)‘lerinin yaptığı çalışmada 3-boyutlu olarak
incelenmiş ancak FEM tabanlı bir metot kullanıldığı
için parçacık-parçacık ve duvar-parçacık etkileşimlerinin göz ardı edildiği belirtilmiştir. Çok yakın
zamanda yapılan bir çalışmada parçacıkların sonsuz
bir akışkan içerisinde olduğu kabülüyle Stokeslet
yaklaşımı kullanılarak akustik bir alanda hareket eden
parçacıkların hareketi incelenmiştir (Baasch vd.,
2017), ancak bu çalışma Stokeslet yaklaşımı
kullandığı için mikro-kanal içerisindeki farklı
geometrilere
sahip
parçacıkların
hareketinin
modellenmesi için uygun değildir.
TEORİ
LİY ile Modelleme
LİY modellemesi için ilk adım parçacıkların olmadığı
bir kanalda alan değişkenleri için simülasyonların
yapılarak alan değişkenlerinin çözüm aralığındaki
dağılımının belirlenmesidir. Akış alanı için mikrokanal içerisinde Navier-Stokes denkleminin uygun
sınır şartlarıyla çözülmesi gerekmektedir (vektörel
büyüklükler için kalın harfler kullanılmıştır):
Süreklilik denklemi:
(1)
r·u=0
Momentum denklemi:
(2)
Burada u akış alanını, p basıncı, ! ve " akışkanın
özkütlesi ve vizkositesini göstermektedir. Ataletsel
MAD uygulamaları hariç mikro-kanallarda parçacık/
hücre manipülasyon uygulamalarında görece düşük
hızlar kullanıldığı için Re sayısı 0.01 mertebelerinde
olmaktadır. Bu nedenle Navier-Stokes denklemi
yerine Stokes denkleminin çözülmesinde uygun
olmaktadır.
Parçacık üzerindeki DEP kuvvetinin hesaplanabilmesi
için kanal içerisindeki elektrik alanın çözülmesi
gerekmektedir. Kanal içerisindeki elektrik alan için
bünye denklemi eğer iyonların taşınması ihmal edilirse
(MAD uygulamaları için tipik bir durumdur) şu
şekilde yazılabilir (Çetin vd., 2017):
(3)
Bu denklemde # akışkanın elektriksel iletkenliği, $
akışkanın permitivitesi, % AC alan uygulanıyorsa
uygulanan elektrik alanın frekansı, i karekök eksi 1.0’i
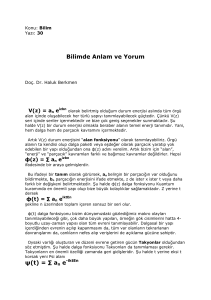
ifade etmektedir. DEP uygulamaları için kullanılması
gereken sınır şartları Şekil 1’de özetlenmiştir.
Şekil 1. DEP uygulamaları için kullanılan sınır şartları
Dielektroforetik Parçacık Manipülasyonu
DEP, parçacıkların doğrusal olmayan elektrik alan
içinde parçacığın dipol momentinin elektrik alanın
uzaysal gradyanı ile etkileşimi sonucu hareket
etmesidir. DEP kuvveti literatürde birçok çalışmada
sentetik parçacıkların ve biyolojik parçacıkların
manipülasyonunda kullanılmıştır (Cetin vd., 2011).
DEP, hem DC hem de AC elektrik alan ile elde
edilebilmektedir. DEP, parçacığın içinde bulunduğu
tampon çözeltinin dielektrik özelliklerine bağlı olarak,
ya yüksek elektrik alan gradyanı (pozitif-DEP) ya da
düşük elektrik alan gradyanı (negatif-DEP) yönünde
olmaktadır. Küresel bir parçacık üzerine DC elektrik
alan içerisinde etki eden DEP kuvveti (DC-DEP),
teorik olan aşağıdaki denklem ile hesaplanabilmektedir (Çetin vd., 2011, 2017):
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
(4)
Bu denklemde, εm tampon çözeltinin elektriksel
geçirgenliği (permittivity), R parçacığın yarıçapını, fCM
Clausius-Mossotti faktörü olarak bilinen parametreyi,
E parçacığın merkezindeki elektrik alanı ifade
etmektedir. Clausius-Mossotti faktörü olarak bilinen
parametre aşağıdaki gibi tanımlanmıştır:
(5)
Eş. (5)’deki p alt indisi parçacığı, m alt indisi tampon
çözeltiyi ifade etmektedir. Karmaşık elektriksel
geçirgenlik aşağıdaki gibi tanımlanmıştır.
DC-DEP uygulamalarına alternatif olarak AC elektrik
alan içerisinde DEP kuvveti yaratmak da mümkündür
(AC-DEP). Küresel bir parçacık üzerine AC elektrik
alan içerisinde etki eden DEP kuvveti, teorik olan
aşağıdaki denklem ile hesaplanabilmektedir (Çetin
vd., 2011):
şınca yansıyarak gelen dalgalarla girişimi sonucu
durağan gözüken ancak sürekli olarak osilasyon hareketi yapan dalgalara denir. Parçacıkların ultrasonik bir
duran dalga alanındaki hareketinin analitik bağıntıları
uzun süredir bilinmektedir. Akustik dalgalar etkisindeki bir bölgede eğer akustik basınç ve akustik alanın
hız vektörü biliniyorsa bu akustik alandaki sıkıştırılabilir parçacığın üzerine düşen akustik kuvvet hesaplanabilir. Dikdörtgen bir kanalda duran akustik dalga
içerisindeki bir parçacığın üzerine etkiyen kuvvet
aşağıdaki ifade ile gösterilir (Büyükkoçak vd., 2014):
(10)
Burada k akustik dalga sayısı, Eac akustik enerji
yoğunluğu ve Φ akustik kontrast faktörüdür. Akustik
dalga sayısı (k = ω/c0) ile gösterilir. ω akustik
dalgaların frekansı ve c0 dalgaların ortamdaki yayılma
hızıdır. Akustik enerji yoğunluğu Eac ortama sağlanan
akustik enerjisi ölçüsüdür ve matematiksel ifadesi
aşağıdadır:
(11)
(6)
Bu denklemde <.> sembolü DEP kuvvetinin zaman
ortalamasını, Re[.] sembolü karmaşık sayının gerçek
kısmını ve rms elektrik alanın ortalama karekökünü
ifade etmektedir. Clausius-Mossotti faktörü Eş.
(5)’deki gibi tanımlanabilmekte ancak geçirgenlik
ifadeleri karmaşık elektriksel geçirgenlik ifadesi ile
€
değiştirilmesi
gerekmektedir:
(6)
DEP kuvveti etkisinde hareket eden parçacığın hareket
denklemi Newton’un ikinci kanunu ve Stokes
süreklem kuvveti kullanılarak aşağıdaki şekilde
yazılabilir.
Stokes denklemi:
(7)
Parçacığın hızı:
(8)
Burada C parçacık-parçacık ve parçacık-duvar etkileşimlerini göz önüne almak için eklenen bir düzeltme
katsayıdır. Parçacık yörüngesi, parçacık hızının zaman
üzerindeki integrasyonu ile bulunabilir:
(9)
Bu denklemde xp(t) parçacığının merkezinin zamana
bağlı lokasyonunu belirtmektedir.
Akustik Parçacık Manipülasyonu
Literatürde mikro-kanal içinde hücre ve parçacık
manipülasyonu için en çok kullanılan metotlardan
birisi de akustik duran dalgaların kullanımıdır
(Büyükkoçak vd., 2014). Duran dalga bir ortamda
ilerleyen akustik dalganın bir sınır koşulu ile karşıla-
Akustik kontrast faktörü ise DEP kuvveti ifadesindeki
Clausius-Mossotti faktörüne denktir ve matematiksel
gösterimi aşağıdaki gibidir:
(12)
Eş. (11) ve (12)’da ρ özkütleyi, p alt-indisi parçacığı, f
alt-indisi tampon çözeltiyi ifade etmektedir.
Yukarıdaki denklem grubunda gösterildiği üzere bir
parçacık üzerine akustik kuvvet etkiyebilir ve DEP’de
olduğu gibi parçacık üzerine etkiyen bu kuvvet parçacığın çapının küpü ile artar. Parçacıkların akustik
özellikleri ile içinde bulundukları sıvı ortamın akustik
özellikleri arasındaki fark arttıkça Φ değeri büyür, bu
da parçacığa etkiyen daha yüksek akustik kuvvet
demektir. Kuvvet akustik duran dalganın oturduğu yön
üzerinde oluşur (bu formulasyonda y-yönü alınmıştır).
Akustik kuvvet etkisi altındaki parçacığın hızı, akustik
kuvvetin Stokes sürtünme kuvvetine eşitlenmesi ile
bulunduktan sonra Eş. (9) kullanılarak parçacığın
yörüngesi elde edilir.
GTY ile Modelleme
Bu yöntemde mikro-kanal içerisindeki akış ve elektrik
alan parçacıklar kanal içerisindeyken çözülmesi
gerekmektedir. Akış ve elektrik alan çözümü için Eş.
(1)-(3)’ün çözülmesi gerekmektedir. Bu denklemdeki
dielektrik özellikler sıvı ve parçacık ayrı ayrı tanımlanarak, parçacık yüzeyinde voltaj ve elektrik alanın
sürekliliği kabulüyle elektrik alan çözülmelidir. Akış
ve elektrik alan elde edildikten sonra parçacık üzerindeki hidrodinamik ve Maxwell stress tensörü parçacık
üzerinde integra edilerek, parçacık üzerindeki kuvvetler bulunabilir:
(13)
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
Benzer şekilde parçacık üzerindeki tork değerleri de
stress tensörlerin momentinin hesaplanması sonucunda bulunabilir:
(14)
Bu denklemde xp parçacığın merkezini belirtmektedir.
Hidromadinamik ve Maxwell stres tensörü aşağıdaki
ifade ile tanımlanmaktadır (Çetin vd., 2017):
(a) Dikdörtgen mikro-kanal
(15)
Burada U unit tensörü, ⨂ sembolü de diadik çarpımı
ifade etmektedir.
Elektrik alan olmayan uygulamlar için Maxwell stres
tensörü hesaba katılmadan sadece akış simülasyonu
yapılması da mümkündür. Bu çalışmada, GTY ile
modelleme için BEM kullanılmıştır. Kullanılan BEM
formülasyonu hakkında detaylı bilgileri ilgili makalelerde bulunabilir (Karakaya vd., 2015, Çetin vd.,
2017).
MODELLEME ÖRNEKLERİ
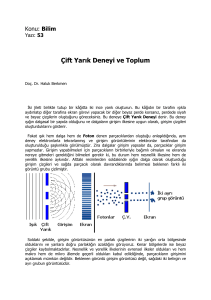
LİY ile DEP Parçacık Hareketi Modellenmesi
DEP prensibi ile çalışan sürekli akış sistemlerin
tasarımındaki en önemli hedef doğrusal olmayan
elektrik alan altında negatif-DEP ve pozitif-DEP
davranışı gösteren parçacıkların ayrılmasıdır. Tasarım
basamağında mikro-akışkan sistemin parçacık ayırma
performansının öngörülebilmesi önemlidir. LİY ile
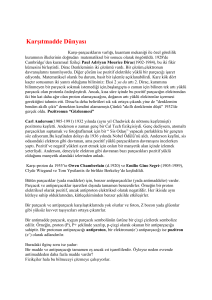
DEP parçacık hareketi modellenmesine örnek olarak
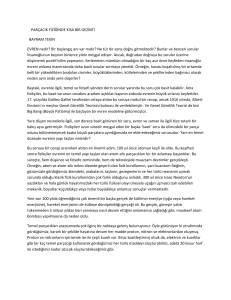
dikdörtgen ve yamuk kesitli, tek giriş ve iki çıkışı olan
iki mikro-kanal içerisindeki n-DEP ve p-DEP davranışı gösteren parçacıkların yörüngeleri Şekil 2’de
verilmiştir. Clausius-Mossotti faktörü n-DEP parçacıklar için -0.5, p-DEP parçacıklar için 1.0 olarak
alınmıştır. Parçacıklar mikro-kanal girişinden birçok
farklı noktadan salınarak çıkışta hangi mikro-kanala
gittikleri modellenmiştir. Burada başarılı bir tasarım
için tüm kırmızı parçacıkların sol kanala, mavi
parçacıkların da sağ kanala gitmesi gerekmektedir.
Şekilden görüldüğü üzere tasarımı yapılan mikrokanallar için uygun debi ve uygulanan voltaj ile
parçacık manipülasyonu başarı ile sağlanmıştır (Çeitn
vd., 2015).
(b) Yamuk mikro-kanal
Şekil 2. Mikro-kanallarda dielektroforetik parçacık
hareketinin LİY ile modellenmesi
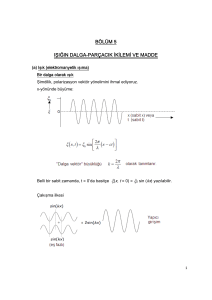
LİY ile Akustik Parçacık Hareketi Modellenmesi
Dikdörtgen kesitli bir mikro-kanalda oluşturulan
durağan bir akustik dalga kanal içerisindeki parçacıkları ortaya doğru itmektedir. Temel olarak akustik
manipülasyon mikro-akışkan sistemlerde parçacık
yıkama ve boyutlara göre parçacık ayırma işlemi için
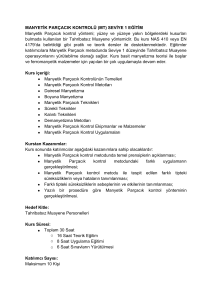
kullanılmaktadır. Parçacık ayırma işlemi için Şekil
4’te gösterildiği üzere farklı bıyutlardaki parçacıklardan oluşan karışım iki yan kanaldan ana kanala
verilerek, parçacıkları ana kanalda ortaya doğru hareket etmesi sağlanmaktadır. Kanal boyunun doğru
seçilmesi ile farklı boyutlardaki parçacıkların farklı
kanal çıkışlarına yönderilmesi mümkündür. Özellikle
başarılı bir ayırma işlemi için uygun debi ve kanal
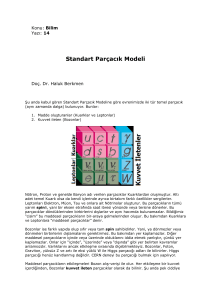
ölçülerinin simülasyonlar ile belirlenmesi gerekmektedir. Şekil 3’de 10-µm, 7-µm ve 3-µm polisteren
parçacıklar için yapılan LİY tabanlı simülasyonların
sonuçları görülmektedir (Büyükkoçak vd., 2014).
Şekilden görüldüğü üzere uygun kanal ölçüleri ve
debide ayırmanın başarı ile yapılabildiği görülmektedir. Geliştirilen sayısal model literatürde deneysel
olarak çalışılmış bir mikro-akışkan sistemin performansının öngörülmesi için başarı ile kullanılmıştır.
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
Şekil 3. Akustik parçacık hareketinin LİY ile modellenmesi
(Kırmızı: 10-µm parçacıklar, Siyah: 7-µm parçacıklar, Sarı: 3-µm parçacıklar)
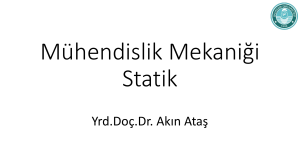
LİY her ne kadar güçlü bir modelleme aracı olsa da
özellikle geometrisi belli parçacıklar için sınırlı
olması, parçacık-parçacık ve parçacık-duvar etkileşimlerini ancak ampirik data ile modelleyebilmesi ve
parçacıkların dönme dinamiği ile ilgili bilgi verememesinden dolayı birçok MAD uygulaması için yetersiz
kalmaktadır. GTY’nde ise bu ihmal edilen etkilerin
tümünü modellenebilmektedir. GTY özellikle parçacık-duvar etkileşimi sonucu ortaya çıkan hidronamik
tabanlı ayırma uygulamaları için çok önemli bir
tasarım aracı olarak karşımıza çıkmaktadır. Parçacıkların boyutlarına göre ayrılması için literatürde sıklıkla
kullanılan hidrodinamik bir yöntem mikro-kanal
içerisine yerleştirilen bir engel yapının etrafından
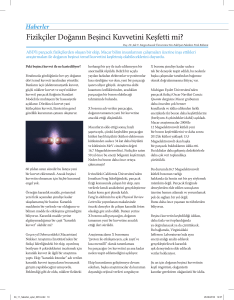
parçacıkların akıtılmasıdır. Böyle uygulamaya yönelik
BEM ile yapılan simülasyon çalışmaları Şekil 4’de
gösterilmiştir. Şekil 4-(a)’da küresel ve oval
parçacıkların 2-boyutlu olarak simülasyonu verilmiştir. Şekilde görüldüğü gibi parçacıkların dönme
dinamikleri başarı ile elde edilmektedir. Şekil 4-(b) de
ise 20-µm ve 8-µm çapındaki iki küresel parçacık yan
duvara eşit uzaklıktan bırakılmış ancak engeli geçtikten sonra yan duvarlara farklı uzaklarda konumlandıkları gözlemlenmektedir, bu da boyuta dayalı bir
ayırmanın yapılabileceğinin göstergesidir (Karaka-ya
vd., 2015). Burada gözden kaçırılmaması gereken bir
nokta parçacıklar kanal duvarında çok yakın hareket
etmelerine rağmen parçacık-duvar etkileşimleri başarı
ile modellenebilmektedir.
İçerisinde çoklu-fizik olan parçacık hareketlerinin
modellenmesindeki parçacık-parçacık ve parçacıkduvar etkileşimleri daha da karmaşık hale gelmektedir.
DEP uygulamarında hem hidrodinamik hem de
elektriksel etkileşimler olmaktadır. LİY ile bu etkilerin
modellenebilmesi için ampirik bir düzeltme katsayısına ihtiyaç duyulmaktadır. Bu katsayı ancak
deneysel çalışma ile elde edilmesi LİY’in bir tasarım
aracı olarak kullanılamasını sınırlamaktadır.
()*+,+)-"+-"6!/+012,+)-"3"µ4"5
GTY ile Parçacık Hareketi Modellenmesi
"#!!
"'!"
!"
!"
"#!!"
"$!!"
"%!!"
"&!!"
"'!!
()*+,+)-"+-".!/+012,+)-"3"µ4"5
(a) 2-boyutlu BEM modellemesi
(b) 3-boyutlu hidrodinamik modelleme
Şekil 4. Mikro-kanallarda hidrodinamik parçacık akışının
GTY ile modellenmesi
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
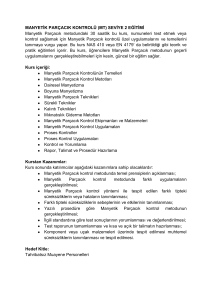
Dielektroforetik parçacık hareketinin GTY ile hassas
bir şekilde yapılması bu etkileşimlerin modellebilmesine imkan vermektedir. Şekil 5’de hem DC-DEP
hem de AC-DEP uygulamalarına yönelik modelleme
çalışmaları verilmiştir (Çetin vd., 2017). DC-DEP
uygulamasında farklı elektrik alan kuvveti altında
15.7-µm ve 5.7-µm çapındaki parçacıkların hareketleri
modellenmiştir. BEM tabalı simülasyon görüldüğü
gibi deneysel sonuçları yakalayabilmektedir. Dolayısı
ile GTY tabanlı bir modelleme hiçbir ampirik parametreye ihtiyaç duymadan parçacık hareketini modelleye-
bilmektedir. Şekilde düzeltme katsayısı eklenen LİY
sonuçlarına da yer verilmiştir. DC-DEP için, özellikle
büyük çaplı parçacıkların düşük başlangıç değerleri
için LİY’in düzeltme katsayısı ile bile bitiş noktasını
tam olarak öngöremediği görülmektedir. AC-DEP
uygulamasında da doğrusal olmayan elektrik alan iki
tane karşılıklı yerleştirilmiş asimetrik elektrot ile elde
edilmektedir. GTY yine başarı ile hiçbir ampirik parametreye ihtiyaç duymadan deneysel sonuçları öngörebilmektedir.
Electrode
ybitiş
ybaşlangıç
Electrode
E = 5kV/m
(a)
E = 20kV/m
ybaşlangıç
ybaşlangıç
Electrode
Electrode
BEM sonuçları
Deney sonuçları
ybitiş
BEM sonuçları
ybitiş
Deney sonuçları
LİY sonuçları
C = 0.25 (15.7µm parçacıklar)
C = 0.50 (5.7µm parçacıklar)
LİY sonuçları
C = 0.5 (10µm parçacıklar)
C = 1.0 (5µm parçacıklar)
(b)
DC-DEP
AC-DEP
Şekil 5. Dielektroforetik parçacık hareketinin GTY ile modellenmesi
YORUMLAR
LİY ve GTY mikro-kanallarda parçacık hareketinin
modellenmesinde kullanılan iki farklı yaklaşımdır.
LİY parçacıkları nokta şeklinde modelleyerek, parçacığın boyut etkisini analitik eşitliklerle ve ampirik
katsayılar ile modele dahil etmektedir. Hesaplama
yükü çok düşüktür, o nedenle birçok ayrı parçacık
boyutu ve özellikleri için hızlı bir şekilde modelleme
yapmaya imkan vermektedir. Bunun yanısıra
GTY’nde parçacıkların kanal içerisinde hareketi
parçacık ile beraber modellenmektedir. Hesaplama
yükü fazladır, o nedenle birçok farklı parametre ve
hücre boyutu için çok fazla simülasyon yapılması
gereken durumlar için uygun değildir. Ancak parçacıkparçacık ve parçacık-duvar etkileşimlerini hiçbir
katsayıya veya modele ihtiyaç duymadan simüle
edebilmektedir. Ayrıca rastgele bir geometriye sahip
bir parçacığın hareketini ve parçacıkların dönme
hareketlerinin modellenmesine olanak vermektedir.
Bu çalışma kapsamında LİY ile DEP ve akustik
uygulamalarına yönelik ve GTY ile hidrodinamik
ayırma ve DEP uygulamalarına yönelik parçacık
hareketi simülasyonları verilmiştir. Bu çalışmalar
ekibimiz tarafından güncel olarak yürütülmekte olan
çalışmalardır ve gelecekte DEP modellemesinin 3boyuta çıkartılması ve BEM modelinin aksutik
manipülasyon modellemesi için kullanılması hedeflenmektedir.
KAYNAKLAR
Ai Y., Joo S. W., Jiang Y., Xuan X., Qian S., 2009, Pressuredriven transport of particles through a converging-diverging
microchannel, Biomicrofluidics, 3, 022404
Ai Y., Qian S., 2010, DC dielectrophoretic particle-particle
interactions and their relative motions, J. Colloid. Interface
Science, 346, 448-454
Ai Y., Mauroy B., Sharma A., Qian S., 2011, Electrokinetic
motion of a deformable particle: Dielectrophoretic effect,
Electrophoresis, 32, 2282–2291
Ai Y., Zeng Z., Qian S., 2014, Direct numerical simulation
of AC dielectrophoretic particle-particle interactive motions,
J. Colloid Interface Sci., 417, 72–79.
Büyükkoçak S., Özer M. B., Çetin B., 2014, Numerical
modeling of acoustophoretic particle separation for
microfluidics, Microfluid. Nanofluid., 17(6), 1025-1037
Çetin B., Li D., 2009, Continuous particle separation based
on electrical properties using AC-DEP, Electrophoresis, 30,
3124-3133
Çetin B., Kang Y., Wu Z., Li D., 2009, Continuous particle
separation by size via AC-DEP using a lab-on-a-chip device
with 3D electrodes, Electrophoresis, 30, 766-772
Çetin B., Li D., 2010, Lab-on-a-chip device for continuous
particle and cell separation based on electrical properties via
AC-dielectrophoresis, Electrophoresis, 31, 3035-3043
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
Çetin B. ve Li D., 2011, Dielectrophoresis in Microfluidics
Technology, Electrophoresis, 32, 2410-2427
Çetin B., Büyükkoçak S., Zeinali S., Özer B., 2013,
Simulation of an integrated microfluidic device for
bioparticle wash, separation and concentration, Proc. ASME
2013 4th Microscale/Nanoscale Heat & Mass Transfer
International Conference, December 11-14, Hong Kong,
China
Çetin B., Özer M. B., Solmaz M. E., 2014, Microfluidic bioparticle manipu-lation for biotechnology, Biochem. Eng. J.,
92, 63-82
Çetin B., Baranoğlu B., 2015, Boundary-Element Method in
Microfluidics, Encyclopedia of Micro and Nanofluidics (2nd
Edition), Springer, 202-213
Çetin B., Özer M. B., Çağatay E., Büyükkoçak S., 2016, An
integrated acoustic and dielectrophoretic particle
manipulation in a microfluidic device for particle wash and
separation
fabricated
by
mechanical
machining,
Biomicrofluidics, 10, 014112
Çetin B., Öner S. D., Baranoğlu B., 2017, Modeling of
dielectrophoretic particle motion: Point particle versus
finite-sized particle, Electrophoresis, 38, 1407-1418
Garbin A., Leibacher I., Hahn P., Ferrand H., Studart A.,
Dual J., 2015, Acoustophoresis of disk-shaped
microparticles: A numerical and experimental study of
acoustic radiation forces and torques, The Journal of the
Acoustical Society of America, 138 (5), 2759-2769.
Glowinski R., Pan T. W., Hesla T.I., Joseph D.D., PeriauxJ.,
2001, A Fictitious Domain Approach to the Direct
Numerical Simulation of Incompressible Viscous Flow past
Moving Rigid Bodies: Application to Particulate Flow, J.
Comput. Phys., 169, 363–426
Hahn P., Leibacher I., Baasch T., Dual J., 2015, Numerical
simulation of acoustofluidic manipulation by radiation
forces and acoustic streaming for complex particles, Lab
Chip, 15, 4302-4313.
House D.L., Luo H., 2010, Electrophoretic mobility of a
colloidal cylinder between two parallel walls, Eng. Anal.
Bound. Elem., 34(5), 471–476
House D.L., Luo H., 2011, Effect of direct current
dielectrophoresis on the trajectory of a non-conducting
colloidal sphere in a bent pore, Electrophoresis, 32, 3277–
3285
Hossan M. R., Dillon R., Dutta P., 2014, Hybrid immersed
interface-immersed
boundary
methods
for
AC
dielectrophoresis, J. Comput. Phys, 270, 640 - 659
Kang Y., Çetin B., Wu Z., Li D., 2009, Continuous particle
separation with localized AC-DEP using embedded
electrodes and an insulating hurdle, Electrochimica Acta,
v.54 p.1715-1720
Kang S., 2013, Direct numerical simulations on the
electrophoretic motion of multiple charged particles using an
immersed boundary method, Comput. Fluids, 73, 10–23
Kang S., 2014, Dielectrophoretic motion of two particles
with diverse sets of the electric conductivity under a uniform
electric field, Comput. Fluids 2014, 105, 231–243
Kang S., 2015, Dielectrophoretic motions of multiple
particles under an alternating-current electric field, Eur. J.
Mech. B Fluids 2015, 54, 53–68.
Karakaya Z., Baranoğlu B., Çetin B., Yazıcı A., 2015, A
parallel boundary element formulation for tracking multiple
particle trajectories in Stoke’s flow for microfluidic
applications, CMES-Comp. Model. Eng. Sci., 104(3), 221249
Mao Z., Yuliang X., Guo F., Ren L., Huang P., Chen Y.,
Rufo J., Costanzo F., Huang T. J., 2016, Experimental and
numerical studies standing surface acoustic wave
microfluidics, Lab Chip, 16, 515-524
Muller P. B., Rossi M., Marin A. G., Barnkob R.,
Augustsson P., Laurell T., Kähler C. J., Bruus H., 2013,
Ultrasound-induced
acoustophoretic
motion
of
microparticles in three dimensions, Physical Review E, 88,
023006(1-12).
Nama N., Barnkob R., Mao Z., Kähler C. J., Costanzo F.,
Huang T. J., 2015., Numerical study of acousto-phoretic
motion of particles in a PDMS microchannel driven by
surface acoustic waves, Lab Chip, 15, 2700-2709
Shi, Y., Yu, Z., Shao, X., 2011, Combination of the directforcing fictitious domain method and the sharp interface
method for the three-dimensional dielectrophoresis of
particles, Powder Technol., 210, 52–59.
Wijaya F. B., Lim K., 2015, Numerical calculation of
acoustic radiation force and torque acting on rigid nonspherical particles, Acta Acustica United with Acustica, 101,
531-542
Zeinali S., Çetin B., Oliaei S., Karpat Y., 2015, Fabrication
of continuous flow microfluidics device with 3D electrode
structures for high throughput DEP applications using
mechanical machining, Electrophoresis, 36, 1432-1442
YAZARLARIN KISA ÖZGEÇMİŞLERİ
Barbaros ÇETİN, İ.D. Bilkent Üniversitesi Makine
Mühendisliği Bölümü’nde öğretim üyesidir. Doktora
derecesini Vanderbilt Üniversitesi’nden (A.B.D.)
almıştır. Kendisinin araştırma konuları elektrokinetik
taşınım, biyomedikal uygulamalarda kullanılan çipüstü-labaratuvar cihazlarında parçacık kontrolü, ısı
borularının modellenmesi ve deneysel doğrulanması
üzerine yoğunlaşmıştır. Dr. Çetin 90’dan fazla makale,
konferans bildirisi, kitap bölümü ve ansiklopedi
girdisinde yazarlık yapmıştır. Doç. Dr. Çetin, 2015
yılında, İ.D. Bilkent Üniversitesi Eğitimde Üstün
Başarı Ödülü’ne layık görülmüştür.
S. Doğan ÖNER, İ.D. Bilkent Üniversitesi Makine
Mühendisliği Bölümü’nde yüksek lisans öğrencisidir.
Lisans derecesini 2016 yılında yine aynı bölümden
almıştır. Yüksek lisans çalışmasında mikro-kanallarda
elektro-kinetik parçacık hareketinin Sınır Eleman
Yöntemi ile modellemesi üzerine devam etmektedir.
M. Bülent ÖZER, TOBB Ekonomi ve Teknoloji
Üniversitesi Makine Mühendisliği Bölümü öğretim
üyesidir. Doktora derecesini University of Illinois at
Chicago’dan (A.B.D.) almıştır. Doktora sonrasında
Baxter Healthcare Corporeation’da 5 yıl Ar-Ge
mühendisi olarak görev alan Dr. Özer’in çalışma
konuları akustik ve gürültü kontrolu, mekanik
ULIBTK’17 21. Ulusal Isı Bilimi ve Tekniği Kongresi
13-16 Eylül 2017, ÇORUM
titreşimler ve mikro-akışkan sistemlerde akustik
parçacık manipülasyonu üzerine yoğunlaşmaktadır.
Besim BARANOĞLU, Atılım Üniversitesi İmalat
Mühendisliği Bölümü’nde öğretim üyesidir. Aynı
zamanda Atılım Üniversitesi Metal Şekillendirme
Mükemmeliyet Merkezi müdürlüğü görevini de
yürütmektedir. Doktora derecesini ODTÜ Mühendislik Bilimleri’nden alan Dr. Baranoğlu, Sınır
Elemanlar Yöntemi, Sonlu Eleman/Sınır Eleman
bağlaşımı, artımlı sac şekillendirme ve hesaplamalı
mekanik konularında araştırmalarını yürütmektedir.