DC motorların sürülmesi ve sürücü devreleri
• Armatür (endüvi) gerilimini
değiştirerek devri ayarlamak
mümkündür.
• Endüvi akımını değiştirerek torku
(döndürme momentini)
ayarlamak mümkündür.
• Endüviye uygulanan akımın
yönünü değiştirirsek ters yöne
dönmesini sağlamak
mümkündür.
• (Kutup yerlerini yani kutup
sargılarına uygulanan akım
yönünü değiştirsek te olur.)
• Sürücü devreleri ile DC
motorların hızları, dönüş yönleri
ve momentleri çok hassas olarak
denetlenebilir.
555 entegresiyle dc motor hız kontrolü
• DC motorların hızını kontrol
• Mesela 12 volt gerilimde tam
etmek için motor gerilimini
hızında çalışan bir motora 1
değiştirmek gerekir.
milisaniye 12 volt uygulansa, 1
milisaniye uygulanmasa, yani
• DC motorun hızı besleme
frekansı 500 Hz ve tepe gerilimi
gerilimiyle doğru orantılıdır.
12 volt olan, bir sinyal uygulansa
• Çoğunlukla sistemimizde bir adet
motora uygulanan ortalama
güç kaynağı olur ve bu kaynağın
voltaj 6 volt olacaktır ve motor
gerilimini değiştiremeyiz.
yaklaşık yarı hızda dönecektir.
• Bu durumda DC motorun hız
• Bu oran değiştirilerek, motorun
kontrolünü yapmak için farklı bir
hız kontrolü yapılabilir.
yöntem düşünülmelidir.
555 timer entegresi
• Sinyal genişliği potansiyometre
ile ayarlanabilen kare dalga
üretmektedir.
• Potansiyometre en sol konuma
alındığında sinyal genişliği %0 a
yaklaşmakta, en sağa alındığında
ise %100 e yaklaşmaktadır.
555’in ürettiği kare dalganın frekansı dirençlerin değerine
ve kondansatörün kapasite değerine bağlıdır.
Kitaptan sayfa 18’den dc motorun transistör ile kontrolü
R4
100
B1
R1
12V
100
Q3
Q1
RV1
D1
BD135
R3
55%
1N4001
1k
12VDC MOT
2N6609
10k
B2
+88.8
12V
Q2
BD136
R2
100
R5
100
Q4
D2
2N3055
1N4001
dc motorun PIC16F877’de bulunan PWM
modülü ile kontrolü
• Otomasyon sistemlerinde PWM
tekniğinin kullanıldığı birçok
uygulama mevcuttur. Bunlardan
en yaygın olanı da dc gerilim
değerinin değiştirilmesi işlemidir.
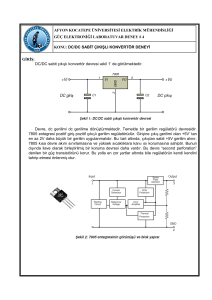
• DC gerilimin değeri “dc-dc
konverter” adı verilen sistemler
ile değiştirilebilmektedir.
• Bu sistemlerde dc gerilimin
seviye dönüşümü için bir veya
daha fazla transistör, mosfet vb.
gibi yarı iletken anahtar kullanılır.
Ortalama çıkış gerilimi
anahtarlama elemanının 𝑇𝑜𝑛 ve
𝑇𝑜𝑓𝑓 zamanı ayarlanarak yapılır.
Anahtarlamalı güç kaynaklarında
gerilim ayarı için yapılan bu
işleme “Darbe (Pulse)
Genişlik(Width) Modülasyonu”
(PWM) adı verilir.
PWM:Darbe genişlik modülasyonu
• 𝑇 = 𝑇𝑜𝑛 +𝑇𝑜𝑓𝑓 eşitliği kullanılır.
• Bu formülde “𝑇𝑜𝑛 ” ifadesi kare
dalga sinyalin lojik-1 değerinde
kalma süresi,
• “ 𝑇𝑜𝑓𝑓 ” ise kare dalga sinyalin
lojik-0 değerinde kalma süresidir.
dc motorun PIC16F877’de bulunan PWM modülü ile
kontrolü
PIC16F877
• PIC16F877 mikrodenetleyici iç
yapısında birçok elektronik
modül vardır.
• Burada PWM modülünün
kullanılmasına değinilecektir.
PWM modülü sayesinde ana
programın çalışmasını meşgul
etmeden otomatik olarak
bağımsız bir hattan PWM sinyali
elde edilebilir.
• MikroC dili ile PWM sinyali
üretmek hazır fonksiyonlar
sayesinde oldukça
kolaylaştırılmıştır.
L293D robotikte en çok kullanılan motor sürücü
entegresidir.
DC motorun PIC(16F877A) ile kontrolü
• Gerekli Komponentler:
• PIC16F877A
• (peripheral Interface Controller)
• L293D motor sürücüsü
• DC Motor
L293D Motor Sürücü Entegresi
• L293D, DC motor kullanılan
robotlarda en çok kullanılan
entegrelerden biridir.
• 16 bacaklı bu entegre, içinde iki
adet H köprüsü ve
• bunlara bağlı hızlı diyot
köprülerini barındırır.
• Her iki motora 600mA akım
sağlayabilen bu entegre,
• aynı zamanda akım korumalıdır.
• Bu koruma, robotun talep ettiği
akımı almasını engelleyebilir.
• Özellikleri:
• Sağ ve sol tarafının bağımsız
çalışmasını sağlar.
• 1 adet L293D iki motoru çift
yönlü kontrol edebilir.
L293D
L293C
NEDEN L293D ?
• Pic’in bir bacağından(pininden)
çekebileceğimiz akım maksimum
25 mA düzeyindedir. Bu akım
seviyesi bir motoru sürmek için
yeterli olmayacağından akımın
kuvvetlendirilmesi
(yükseltilmesi) gerekmektedir.
İşte bu kuvvetlendirme işini de
içinde transistor, mantık kapısı
ve diyot barındıran L293D
entegresi yapmaktadır.
• Bu entegre vasıtasıyla
çekilebilecek maksimum akım
600 mA olduğundan daha fazla
akım gerektiren uygulamalarda
bu entegre kullanılamayacaktır,
onun yerine çekilebilecek akım
düzeyi 4 A’ e kadar çıkabilen
L298 entegresi kullanılabilir. Bu
entegreler hakkında daha fazla
bilgi kataloglarında(datasheet)
bulunabilir.
Proteus ve mikroC araçları da kullanımda
L293 motor sürücü entegresine;
• 0x01=0000 0001 ve
• 0x02= 0000 0010
• uygulanır ise motora uygulanan
gerilimin polaritesi değiştirilmiş
olur.
• Bu sayede motor dönüş yönü
değiştirilmiş olur.
16F877A mikro denetleyicisinde CCP(CaptureCompare-Pwm) modülü mevcuttur.
butonlar
• D portu giriş yapıldı.
• Girdiler yani;
• butonların açılıp kapatılması ile
sağa sola dönüşler, hızlanma ve
yavaşlama sağlanıyor.
mikroC kodları aşağıdaki gibidir.
eğer RD1 butonuna basılırsa CW saat yönünde
eğer RD6 butonuna basılırsa CCW saat yönünün
tersine hareket sağlanır.
Eğer RD2 butonuna basılırsa hız artırılır. Osilaskop
ekranında PWM sinyalinin Ton ve Toff süreleri
gözetlenir.
Eğer RD4 butonuna basılırsa hız azaltılır.
Reset butonu ile başlangıç noktasına yani
durgunluğa dönülür.
RESET
DC motor hızlan yavaşla mikroC kodları