Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
PID KONTROL
835
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Hata-Küpü Kontrol Yapısının Teorik İncelenmesi
Baris Baykant Alagoz1, Abdullah Ates2, Celaleddin Yeroglu2
(1)
Elektrik Elektronik Mühendisliği Bölümü
(2)
Bilgisayar Mühendisliği Bölümü
İnönü Üniversitesi, Malatya, Türkiye
[email protected]
adaptif kontrol uygulamalarında da yer
edinmiştir [13-16].
Doğrusal hata sinyali, yaygın olarak
referans sinyal ile çıkış sinyali arasındaki fark
olarak tanımlanır e(t ) I (s) O(s) . Doğrusal
hata ile negatif geri beslemeli kapalı çevrim
kontrol sistemleri gerçekleştirilmiş ve böylece
sistemlerin kararlılığı ve kontrol edilebilirliği
sağlamıştır. Doğrusal hata, PID, kayan kipli
denetimli kontrolör, kesir dereceli PID
kontrolör, Lag-Lead yapıları.. gibi bir çok
kontrol yapısında kullanılmıştır. Doğrusal
olamayan
hata-karesi
kontrol
yapısı
2
( e(t ) (I (s) O(s)) ) ise literatür de incelenmiş
avantaj ve dezavantajları tartışılmıştır [17].
Bu çalışmada, ise doğrusal olmayan hataküpü kontrolü, klasik PID yapısına
uygulanmıştır. Hata-küpü,
doğrusal hata
işaretinin küpü ile elde dilmiştir. Hata-küpünü
kullanan bu tip kapalı çevrim kontrol
mimarisi, hata-küpü kontrol sistemi olarak
isimlendirilmiştir. Hata küpü kontrol yapısının
avantaj ve dezavantajları analiz edilmiştir.
Hatanın-küpü PID kontrol sisteminin
kontrol performansı çift motorlu TRMS
simülatörün de test edilmiş, doğrusal hata PID
kontrol ve kesir-dereceli PID kontrol birim
basamak cevapları ile karşılaştırılmıştır.
Özetçe
Bu makalede hata-küpü kontrol yapısı için
teorik bir çalışma sunulmuştur. Çalışmada,
kapalı çevrim bir kontrol sisteminde, hata
işaretinin küpünün kullanılması durumu
değerlendirilmiştir.
Hata-küpü,
kontrol
sistemine doğrusal olmayan bir hata sinyali
sağlamaktadır. Bu sinyalin düzeyine bağlı
olarak,
hatanın
zayıflatıldığı
ve
kuvvetlendirildiği
bölgelerin
oluştuğu
görülmüştür. Bu doğrusal olmayan hata
bölgeleri, düşük aşımlı kontrol imkânı sağlar
iken, oturma noktasında kalıcı hal hatalarına
yol açmaktadır. Hata-küpü kontrolünün,
doğrusal hata kontrol sistemini kesir dereceli
kontrol sistemine dönüştürdüğü saptanmıştır.
Hata-küpü PID kontrolör yapısı ile TRMS
(Twin Rotor MIMO System) simülatörün de
test edilmiş ve elde edilen bulgular
tartışılmıştır.
Anahtar Kelimeler: Doğrusal olmayan
kontrol, PID, kesir dereceli kontrol, hata küpü
1. Giriş
Kapalı çevrim PID kontrol sistemleri
gerçekleme kolaylığı ve etkin kontrol
kabiliyetleri nedeni ile uzun yıllardır pratik
uygulamalarda tercih edilmektedir. PID
kontrolör konusunda ilk çalışmalar Minorsky
[1] ve Callender [2] tarafından sırasıyla 1922
ve 1936 yıllarında gerçekleştirilmiştir. Daha
sonraları, PID yapısı akademik çalışmalarda ve
endüstriyel uygulamalarda önemli bir yer
edinmiştir [3-9].
Günümüze kadar bu
kontrolör yapısının, kararlılığı ve optimumum
kontrol problemleri ile ilgili sayısız çalışma
yapılmıştır [3,4,10-12].
Yapay zeka
yöntemleri yardımı ile PID kontrolör yapıları
2. Metot
2.1. Hata-Küpü Sinyali:
Kapalı çevrim kontrol sistemlerinde, hataküpü işareti aşağıdaki gibi tanımlanabilir,
eküp (t ) (r (t ) o(t ))3 .
1
836
(1)
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Bu denklemde, geçiş noktası katsayısıdır.
sırasıyla sistemin çıkış ve
o(t ) ve r (t )
girişleridir. Hata-küpü, doğrusal hata işaretini
( e(t ) ), hata işaretinin enerjisi ile ölçekler,
eküp (t ) (e(t )) 2 e(t ) . Şekil 1, 1 için hataküpünün, e(t ) ’nin -1.5 ve +1.5 aralığındaki
karakteristiğini göstermektedir. Etiket 1 ile
gösterilen değer aralığı, hatanın zayıflatıldığı
bölgeyi göstermektedir. Etiket 2 ile gösterilen
değer aralığı, hatanın kuvvetlendirildiği
bölgeyi göstermektedir. Hata’nın zayıflatıldığı
ve kuvvetlendirildiği bölgeler geçiş noktasında
(GN)
birleşmektedir. Geçiş noktasının
konumu eGN 1 / ile ayarlanır. Hata-küpü
kontrolünün, avantaj ve dezavantajları şöyle
özetlenebilir:
2.1. Hata-Küpü Kapalı Çevrim Kontrol
Yapısı Analizi:
Şekil 2’de hata-küpü kapalı çevrim kontrol
yapısı temsili olarak gösterilmiştir. Bu kontrol
mimarisi, doğrusal kontrol yapılarına, hataküpü bloğu eklenerek elde edilmiştir.
r
(3)’de
GN
T ( s ) O( s ) / R ( s )
2
0
0.5
düzenlemeler
(4)
(C ( s)G( s))1 / 3
( s) (C ( s)G( s))1/ 3
(5)
eGN
-0.5
(3)
ifadesi elde edilir. Gerekli düzenlemeler
yapılırsa, hata-küpü kontrolörün, kapalı çevrim
transfer fonksiyonu için,
-1
-1
gerekli
1/ 3 ( R(s) O(s))(C (s)G(s))1/ 3 O(s)1/ 3
1
eGN
(2)
( R(s) O(s))3 C(s)G(s) O(s)
GN
-3
G(s)
Şekil 2’deki kapalı çevrim kontrol sistemi için
denklem (3) yazılabilir.
1
-2
u
Eküp (s) ( R(s) O(s)) 3
2
0
C (s)
Hata küpü sinyali s tabanındaki denklem (2)
ile ifade edilir:
3
0
Şekil 2. Hata–Küpü kapalı çevrim kontrol
sistemi blok diyagramı
Denklem
yapılırsa,
2
eküp
eküp
Zayıflatma bölgesinde, hata işaretin
zayıflatılması,
osilatif
bileşenleri
kompanze edebilirken, kalıcı hal
hatalarına
sebebiyet
verebildiği
görülmüştü.
Kuvvetlendirme
bölgesinde,
hata
işaretinin
kuvvetlendirilmesinin
sistemin cevabını hızlandırabildiği
görülmüştür.
e3
e
1
ifadesi
yazılabilir.
Burada,
1/ 3
2 / 3
(s) O(s)
’dir. O( jw) 0 için
e
Şekil 1: Hatanın sinyali (Kesik Çizgi) Hata
sinyalinin küpü (Kalın Çizgi)
hatanın küpü kapalı çevrim sisteminin transfer
fonksiyonu zayıf kontrol transfer fonksiyonu
T (s) 0 ’a
olan
yakınsamaktadır.
2
837
o
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
i 1,2,3, , n sağlaması durumunda hata-küpü
kontrol sistemi kararlı olacaktır.
O( jw) 1/ 2 1/ eGN olduğu zaman ise hataküpü kontrol sistemi, Denklem (6) ile ifade
edilebilen kesir dereceli kontrolör ve sistem
fonksiyonuna sahip, kapalı çevrim kontrol
sistemine yakınsar.
T ( s ) O( s ) / R ( s )
(C ( s)G( s))1/ 3
1 (C ( s)G( s))1/ 3
3. TRMS Simülasyon Sonuçları
Hat-küpü PID kontrol, TRMS simülatörü ile
incelenmiştir. TRMS simülatörü, laboratuar
koşullarında helikopter uçuş kontrol deneyleri
yapılmasına imkan sağlayan bir deney setidir
[18]. TRMS, Şekil 3’de MATLAB simulink
simülasyon modelinde resmedildiği gibi, dikey
seviye hareketini sağlayan asıl rotor ile yatay
seviye hareketini sağlayan kuyruk rotorundan
oluşmaktadır. Rotorlar, DC elektrik motorları
ile imal edilmiştir. Uygulanan giriş voltajı ile,
dönme hızları ayarlanarak, açısal olarak
istenen bir konuma getirilebilmektedir. Fakat,
TRMS sisteminin kontrolü, aerodimaik
etkileşimleri içeren, doğrusal olmayan bir
kontrol problemidir [20, 21].
Şekil 4’de hata-küpü PID kontrol ile klasik
kontrol sistemi birim basamak cevapları
karşılaştırılmıştır. Hata-küpü kontrol yapısı,
manuel
olarak
ayarlanmıştır.
( K p 5 , K i 7 , K d 10 ). Elde edilen PID
katsayıları ile klasik PID kontrolör (Doğrusal
hata) test edilmiştir. Şekil 4’de görüldüğü gibi,
hata-küpü kontrolü daha düşük maksimum
aşım vermiş ve oturma zamanı performansı
daha iyi elde edilebilmiştir.
(6)
Hata-küpü kontrol sisteminin çıkışı 0 dan
1/ 2 değerine ulaşırken, hata-küpü kontrol
sisteminin
karakteri
zayıf
kontrolden
( T ( s) 0 ) , kesir-dereceli kontrol sistemine
evrilir. Bu durum, doğrusal olmayan hata
işareti kullanımının, sistemin karakterini, çıkış
işaretine bağlı olarak değişken kıldığını
gösterir.
Hata-küpü kapalı çevrim sistemin karakteristik
polinomu Denklem (7) ile ifade edilebilir.
(s) 1/ 3O(s) 2 / 3 (C (s)G(s))1/ 3
(7)
Bu sistemin kararlılığı için, kutuplar sol yarı
düzlemde yer almalıdır.
1O(s) 2 C (s)G(s) 0
(8)
Diğer bir ifade ile, Denklem (8) ile gösterilen
karakteristik
denklemin,
kökleri
p1 , p2 , p3 ,,, pn olsun, Arc pi / 2 her
3
838
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Şekil 3. TRMS sisteminin dikey seviye hareketi sağlayan motorun MATLAB simulink modeli
0.7
0.7
PID
0.6
PID
0.6
0.5
0.5
0.4
0.4
Hata-küpü
0.3
Hata-küpü
0.3
0.2
0.2
0.1
0.1
0
10
20
30
40
50
60
70
0
80
10
Şekil 4. TRMS sisteminin dikey seviye
hareketi sağlayan motorun MATLAB simulink
model
20
30
40
50
60
70
Şekil 5. Hata-küpü PID kontrol ile klasik
kontrol sistemi birim basamak cevapları
PID katsayıları, öncelikle klasik PID yapısına
göre
optimize
dilmiştir
( K p 5 , K i 8 , K d 10 ).
Sonra,
aynı
katsayılar
ile
hata-küpü
kontrolü
gerçekleştirilmiştir. Şekil 5’de görüldüğü gibi,
hata-küpü kontrolü düşük maksimum aşım
veriyor olmasına rağmen, kalcı hal hatası
sergilediği görülmüştür. Hata-küpü kontrol
yaklaşımının önemli bir dezavantajı katsayılar
iyi ayarlanmadığı durumda, kalıcı hal hatası
bırakmasıdır.
Şekil 6’da hata-küpü PID kontrol ile
kesir
dereceli
PID
kontrol
sistemi
karşılaştırılmıştır. Kesir dereceli PID bloğu
için Valerio’nun non-integer simulink bloğu
kullanılmıştır [21]. Hata-küpü kontrol yapısı,
için ( K p 5 , K i 8 , K d 10 ) kullanılmıştır.
Kesir dereceli PID yapıda manuel olarak
ayarlanmıştır( K p 1, K d 2 , Ki 2 , 1.1 ,
1.05 ). Simülasyon sonuçları, hata-küpü
kontrol yapısının, kesirli derece kontrol yapısı
ile kıyaslanabilir birim basamak cevabı
sergileyebileceğini göstermiştir.
PID
0.6
0.5
Hata-küpü
0.4
0.3
0.2
0.1
0
10
20
30
40
50
60
70
80
Şekil 6. Hata-küpü PID kontrol ile kesir
dereceli PID kontrol sistemi
Şekil 7’de hata-küpü PID kontrol ile klasik
kontrol sistemi bozucu etki cevapları
karşılaştırılmıştır. Kalıcı hal hatasına neden
olan problem, bozucu etki karşısında hataküpü kontrol yapının başarısını oldukça
düşürmüştür. Hata-kare kontrol yapısında [17]
gözlemlendiği
gibi
hata-küpü
kontrol
yapısında da hata zayıflatma bölgesinde
4
839
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
osilatif cevap
görülmüştür.
veya
kalıcı
hal
hataları
[3] J. G. Juang, R. W. Lin, W. K. Liu, Comparison of
classical control and intelligent control for a MIMO
system, Applied Mathematics and Computation 205
778–791, 2008.
[4] B.C. Kuo, Automatic Control Systems, sixth ed.,
Prentice-Hall, Englewood Cliffs, NJ, 1995.
[5] J.G. Ziegler, N.B. Nichols, Optimum settings for
automatic controllers, Trans. ASME ,759–768,
1942.
[6] M. S. Saad, M. Jamaluddin, I.Z.M. Darus,
Implementation of PID Controller Tuning Using
Differential Evolution and Genetic Algorithms,
International Journal of Innovative Computing,
Information and Control 9, 7761-7779, 2012.
[7] M. R. Rani, H. Selamat, H. Zamzuri, Z. Ibrahim,
Multi-Objective Optimization For PID Controller
Tunning Using The Global Ranking Genetic
Algorithm, International Journal of Innovative
Computing, Information and Control 8, 269-284,
2012.
[8] M. Tokuda, T. Zamamoto, Self-Tuning PID
Controller Based on Control Performance
Evalutions, International Journal of Innovative
Computing, Information and Control 6, 3751-3762,
2010.
[9] R. Sanchis, J. A. Romero and P. Balaguer, Tuning
of PID controllers based on simplified single
parameter optimisation, International Journal of
Control 83, 1785-1798, 2010.
[10] Rihem Farkh, Kaouther Laabidi, and Mekki
Ksouri, Computation of All Stabilizing PID Gain
for Second-Order Delay System, Mathematical
Problems in Engineering, Article ID 212053, 17
pages, 2009.
[11] Tan, N. and D. P. Atherton, “Feedback
Stabilization Using the Hermite Biehler Theorem,”
Proc. of the 2nd Int. Conf. on the Control of the
Indisturial Processess, pp. 253-256, New Castle,
UK, 1999.
[12] Tan, N. and D. P. Atherton, “Absolute Stability
Problem
of
Systems
with
Parametric
Uncertainties,” European Control Conference,
Karlsruhe, Germany, 1999.
[13] C. R. Madhuranthaka, J. Singh, A. Elkamel, H.
Budman, Optimal PID controller parameters for
first order and second order systems with time
delay using a connectionist approach, Engineering
Optimization 42, 295–303, 2010.
[14] R. Sanchis, J. A. Romero and P. Balaguer,
Tuning of PID controllers based on simplified
single parameter optimisation, International Journal
of Control 83, 1785-1798, 2010.
[15] C. C. Wong, S. A.Li, and H. Y. Wang, Hybrid
Evolutionary Algortihm For PID Controller Design
Of AVR system, Journal of the Chinese Institute of
Engineers, 32, 251-264, 2009.
0.9
0.8
0.7
PID
0.6
0.5
0.4
Hata-küpü
0.3
0.2
0.1
0
10
20
30
40
50
60
70
80
Şekil 7. Optimize hata-küpü PID kontrol ile
optimize klasik kontrol sistemi bozucu etki
cevapları
4. Sonuçlar
Bu çalışmada, hata-küpü control yapısı
incelenmiş,
avantaj
ve
dez-avantajları
tartışılmıştır. Hata-küpü control yapısının,
aşımsız birim basamak cevabı verebilmesine
ragmen, kalıcı hal hatası sergilediği
görülmüştür. Bunun temel nedeni, hatanın
zayıflatma bölgesinde, genliğinin düşürülmesi
ve PID kontrolör cevabının bu nedenle
zayıflamasıdır. Ancak, hata kuvvetlendirme
bölgesinde
sergilenen
hata
genliği
güçlendirmesi, düşük aşımlı hızlı cevaba
olanak sağlamıştır.
Hata-küpü kontrol sistemi, kesir-dereceli
transfer
fonksiyonuna
sahip
olduğu
görülmüştür.
Kaynaklar
[1] N. Minorsky, Directional stability of automatically
steered bodies, J. Am. Soc. Naval Eng. 280–309,
1922.
[2] A. Callender, D.R. Hartree, A. Porter, Time-lag in a
control system, Philos. Trans. R. Soc. Lond. 415–
444, 1936.
5
840
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
[16] C.C. Kao, C.W. Chuang, R.F Fung, The self-tuning
PID control in a slider–crank mechanism system by
applying particle swarm optimization approach,
Mechatronics 16, 513-522, 2006.
[17] Myke King, Process Control: A Practical
Approach, Process Control: A Practical Approach,
Wiley, 105-113,2011.
[18] Feedback Instruments Twin Rotor MIMO System
Control Experiments 33-949S (For use with
MATLAB R2006bversion 7.3, 2006) Control
withInterval Gain and Phase Margins Assignment”,
IEEE
[19] A. Ates, C. Yeroğlu, M. F. Talu, Gerçek Zamanlı
TRMS için Geliştirilen YSA Algortiması, Otomatik
Kontrol Ulusal Toplantısı, TOK12, Niğde, 2012.
[20] A. Ateş, C. Yeroğlu, TRMS İçin Referans Modele
Dayalı Optimal Kesir Dereceli PID Tasarımı,
Otomatik Kontrol Ulusal Toplantısı, TOK12,
Niğde, 2012.
[21] D. Valerio, Ninteger v. 2.3 Fractional Control
Toolbox for MATLAB, http://web.ist.utl.pt/~
duarte.vale (Son erişim tarihi 08.05.2013)
6
841
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Hidrolik Bir Sistemin YSA ile Modellenmesi ve
GA-PID ve PSO-PID ile Kontrolü
Erdal Yılmaz1, Vedat Topuz2, A. Fevzi Baba3
1
Uzaktan Eğitim Merkezi
Okan Üniversitesi, İstanbul
[email protected]
2
Teknik Bilimler Yüksekokulu
Marmara Üniversitesi, İstanbul
[email protected]
3
Teknoloji Fakültesi
Marmara Üniversitesi, İstanbul
[email protected]
optimal değerleri Genetik Algoritma (GA) ve Parçacık Sürü
Optimizasyonu (PSO) ile bulunmuştur.
Özetçe
Bu çalışmada hidrolik eğitim seti üzerinde bulunan hidrolik
motor kontrol sisteminin yapay sinir ağları ile modellenmesi
yapılmıştır. Sistem modelinin ve sistemin kontrolü için
kullanılan PID kontrolör parametrelerinin optimal değerlerinin
bulunması için de genetik algoritma ve parçacık sürü
optimizasyonu yöntemleri kullanılmıştır.
2. Sistemin Yapısı
2.1. Sistemin Çalışma Prensibi
Sistemin hız kontrolü için bilgisayardan koşturulan yazılımdan
veri toplama kartına RS232 portu üzerinden bir kontrol bilgisi
gönderilir (1), veri toplama kartındaki sayısal-analog
dönüştürücü ile kontrol bilgisi analog bilgiye çevrilerek
dönüştürücü karta verilir (2) [7]. Dönüştürücü karta gelen
analog değer servo hidrolik valfin kontrol giriş değerleri olan
0-10 volt değerlerine çekilerek kontrol sinyaline dönüştürülüp
servo hidrolik valfe verilir (3). Valf kendisine gelen kontrol
sinyaline bağlı olarak hidrolik güç ünitesinden gelen basınçlı
hidrolik yağın oranını ayarlayarak hidrolik motora iletir.
Hidrolik motorun milinden hidrolik motorun kendisine gelen
hidrolik yağ miktarına bağlı olarak bir hız üretir (4). Hidrolik
motorun miline bir kayış sistemi ile bağlı olan tako jeneratöre
de hidrolik motorun milindeki hız aktarılır. Aktarılan bu hız
sonucunda bir gerilim oluşur. Oluşan bu analog gerilim bilgisi
dönüştürücü karta verilerek 0-5 volt aralığına çekilir (6). 0-5
volt aralığındaki bu analog bilgi veri toplama kartının analogsayısal dönüştürücü birimine verilerek sayısallaştırılır.
Sayılaştırılan bu bilgi RS232 portu üzerinden bilgisayara
verilir (7). Şekil 1’de sistemin çalışma prensibi blok diyagram
şeklinde gösterilmiştir.
1. Giriş
Literatürde hidrolik sistemlerin modellenmesi ve kontrolü
üzerine yapılmış birçok çalışma bulunmaktadır. İstif ve Kutlu
elektro hidrolik bir sistemin PD kontrolünü gerçekleştirdikleri
çalışmada, PD kontrol parametrelerini Ziegler-Nichols (ZN)
sürekli titreşim yöntemi ile hesaplamışlardır [1]. Bercan ve
arkadaşlarının, yapmış olduğu çalışmada hidrolik konum
kontrol sisteminin gerçeğe yakın benzetimi yapılmıştır.
Çalışmada akışkanın sıkıştırılabilirliği özelliği dikkate alınarak
sistem PD kontrol algoritması ile kontrol edilmiştir [2]. İstif
ve arkadaşları, servovalf ve hidrolik motordan oluşan elektro
hidrolik sistemi Bond-Graph ile modellemişler, konum
kontrolünü PD kontrol ile gerçekleştirmişlerdir. PD kontrol
katsayıları ve sistem parametreleri arasındaki ilişkileri
irdeleyerek, sistemin dinamik davranışlarını gözlemlemiştir
[3]. Şengirgin, servovalf ve hidrolik motordan oluşan hidrolik
sistemin açısal hız denetimi incelenmiştir. Sistemin
matematiksel modelini çıkarttıktan sonra Matlab Simulink
kullanılarak benzetimi oluşturmuştur. Daha sonra sistemin
değişik yükler altındaki dinamik davranışı ve P, PD ve PID
denetimleri için en uygun denetim organı parametreleri ZN
cevap ergisi yöntemi ile tespit etmiştir [4]. Çağrı, gerçek bir
hidrolik asansör sisteminin hız kontrolü sağlanmıştır. Kontrol
yöntemi olarak geleneksel PID, koşullandırılmış PID ve
kayma kipli kontrolör tipleri birleşimleri kullanmıştır [5].
Katrancıoğlu ve arkadaşları hidrolik bir motorun hız
kontrolünü bulanık mantık kontrolörü ile gerçekleştirmişlerdir
[6].
Yapılan bu çalışmada, literatürde belirtilen çalışmalardan
farklı olarak sistemin modeli Yapay Sinir Ağları (YSA) ile
çıkartılmış, kontrol algoritması olan PID'in parametrelerine ait
Şekil 1. Sistemin Çalışma Prensibi
842
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
bağlı olarak sistem öğrenilir ve sistemin dinamik modeli elde
edilir.
2.2. Sistemin Donanımsal Yapısı
Çalışmada kullanılan sistem donanımsal olarak, servo hidrolik
valf (1), hidrolik motor (2), veri toplama kartı (3), bilgisayar
(4), tako jeneratörü (5) ve hidrolik güç ünitesinden (6)
oluşmaktadır. Sistemin donanımsal yapısı şekil 2’de
gösterilmiştir.
3.1. Sistemin YSA ile Modellenmesi
Sistemin modellenmesinde Seri-Paralel İleri Tip modelleme
kullanılmıştır. Bu tip modellemede m adet gecikmeli girişe
karşılık n adet gecikmeli çıkış yanı sıra bir de model ve sistem
çıkışı arasındaki hatanın bir öğrenme algoritmasından
geçirilerek elde edilen üç veri kullanılır. Şekil 4'te Seri-Paralel
ileri tip modellemenin şeması verilmiştir [9].
Şekil 2. Sistemin Donanımsal Yapısı
2.3. Sistemin Açık Çevrim Cevabı
Şekil 4. Seri-Paralel İleri Tip Modelleme Şeması
Çalışmada
kullanılan
hidrolik sistemin
davranışını
belirlenmesi için sistemde bulunan servo hidrolik valfe 1-10
volt arasında 1 voltluk değişimler ile kontrol sinyalleri
uygulanarak sistemin açık çevrim cevabı elde edilmiştir. Şekil
3'te sistemin 1-10 volt arasındaki farklı kontrol sinyallerine
karşılık vermiş olduğu açık çevrim cevapları bulunmaktadır.
Sistemin YSA ile modellenmesinde kullanılan veri setindeki
verilerin %70’i YSA modelinin eğitilmesi, %15 modelin
doğrulanması ve %15’i de modelin testi için kullanılmıştır.
YSA modelinin eğitilmesi sırasında Levenberg-Marquardt
eğitim algoritması ve performans olarak da sistem çıkışı ile
model çıkışı arasındaki verilerin regresyon değeri
kullanılmıştır.
Tablo 1'de de görüldüğü gibi YSA modelleri için farklı
nöron sayısı ve geçmiş mod sayısı kullanılmıştır. Performans
değeri 1' en yakın olan model sistemin dinamik modeli olarak
seçilmiştir [9].
Tablo 1. Farklı YSA Modelleri ve Sonuçları
No
1
2
3
4
5
6
7
8
9
10
11
12
13
Şekil 3. Sistemin Açık Çevrim Cevapları
Şekil 3’te görüldüğü gibi sistemin kontrol sinyallerine
cevapları belirli bir gecikme ile olmuştur. Kontrol sinyali
olarak verilen 1 volt için sistemin cevabı diğer kontrol
sinyallerine göre daha gecikmeli olarak başlamış ve salınım
şeklinde devam etmiştir. Ayrıca kontrol sinyalinin değeri 7
volt ve üzeri durumlarda ise sistemin cevabı birbirine benzer
şekilde olmuştur.
3. Sistemin Modellenmesi ve Kontrolü
Klasik modellemede sistemin elemanları arasındaki bağlantı
fiziksel kanunlara bağlı olarak ifade edilir [8]. Karmaşık
sistemlerde bu işlemin gerçekleştirmesi oldukça zordur.
Bunun yerine sistemden alınan veriler yardımı ile giriş-çıkış
veri seti oluşturulur. Bu veri seti ile bir öğrenme algoritmasına
843
Model Parametreleri
Gizli
Katmandaki Geçmiş Mod
Nöron Sayısı
Sayısı
5
2
5
5
5
10
10
2
10
5
10
10
20
2
20
5
20
10
30
2
30
5
30
10
30
20
Performans
Sistem Çıkışı Model Çıkışı
Regresyon
0.99233
0.99085
0.98258
0.99396
0.99036
0.99784
0.74797
0.98601
0.99767
0.64621
0.99278
0.99768
0.99896
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
verilmiştir.
Elde edilen model ile sistemin belirli kontrol sinyallerine
karşılık vermiş oldukları açık çevrim cevapları şekil 5'te
Şekil 5. Belirli Basamak Girişler için Sistem ve Modelin Açık Çevrim Cevapları
Şekil 5'te görüldüğü gibi model ve sistem belirli bir gecikme
ile cevap vermiştir. Ayrıca modelin çıkışları sistemin
çıkışlarından önce ve daha yüksek değerde olmuştur.
Ardı ardına verilen faklı kontrol sinyalleri için sistemin ve
modelin cevapları şekil 6'da verilmiştir.
Şekil 6. Rastgele Verilen Kontrol Sinyalleri için Sistem ve Model Çıkışları
Şekil 6'da model ve sistem 0.5 saniyelik periyotlarda değişmek
koşuluyla ardı ardına verilen kontrol sinyallerine karşı vermiş
oldukları açık çevrim cevapları verilmiştir.
844
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
rk: k’nıncı referans değeri,
yk: k’nıncı sistem çıkış değeridir.
3.2. Kontrol Algoritması ve Parametrelerinin Optimal
Değerlerinin Bulunması
3.2.1.
GA için tablo 2'de verilen parametreler, PSO için tablo 3'te
verilen parametreler kullanılmıştır [9].
Kontrol Algoritması
Tablo 2. GA Parametreleri
Sistemin kontrolünde PID kontrol algoritması kullanılmıştır.
PID kontrolörün basit yapısı ve kullanışlığı ile endüstriyel
kontrol sistemlerinde halen yaygın olarak kullanılan geri
beslemeli bir kontrol yöntemidir. [8]. Bir PID kontrolör ölçülü
bir süreç içinde değişen ve istenilen ayar noktası ile arasındaki
farkı olarak bir "hata" değerini hesaplar. Bu hata değerini
belirli parametreler ile işleme tabi tutarak bir kontrol sinyali
üretir. Şekil 7'de PID kontrolörün yapısı verilmiştir.
Parametre
Tipi
Büyüklüğü
Popülasyon
Sonlandırma
Kriteri
Sınırlama
Parametreleri
Değer
Çift vektör
20
Jenerasyon
100
Başlangıç ceza
Ceza faktörü
10
100
Tablo 3. PSO Parametreleri
Parçacık
Sayısı
40
Şekil 7. PID Kontrolörün Yapısı
1
E ( z ) Kd (1 z 1 )
1 z 1
Öğrenme
Faktörleri
1
İterasyon
Sayısı
20
Şekil 8'de GA ve PSO'nun PID parametrelerini bulmasındaki
akış şemaları verilmiştir.
Şekil 7'de verilen PID algoritmasının ayrık zamandaki formülü
(1) denklemdeki gibidir [8].
U ( z ) E ( z ) Kp E ( z ) Ki
Parçacık
Boyutu
3
(1)
Ayrık zamanda verilen PID kontrolörün (1) fark denklemi ile
yazılmış hali (2) denklemidir [10].
U [ E0 * (Kp Ki Kd )] [ E1* ( Kp (2 * Kd ))] ( E 2 * Kd )
(2)
Şekil 8. GA ve PSO ile PID Parametrelerinin Bulunması
3.2.2.
Kontrolör Parametrelerinin Optimal Değerlerinin
Bulunması
Tablo 4'te GA ve PSO ile optimal değerleri bulunan PID
parametreleri verilmiştir.
PID kontrolörün parametreleri olan Kp, Ki ve Kd'nin optimal
değerlerinin bulunması için genetik algoritma ve parçacık sürü
optimizasyonu algoritmaları sistemin YSA ile elde edilen
modeli üzerinde kullanılmıştır. Referans ve çıkışın GA ve
PSO uygun hale getirilmesinde (3) denklemindeki uygunluk
fonksiyonu kullanılmıştır [8].
Tablo 4. GA ve PSO ile Bulunan PID Parametreleri
GA
PSO
n
(rk y k ) 2
k 1
n
Kp
0.22732
0.17213
PID
Ki
0.025571
0.018225
Kd
0.68682
-0.50142
4. Deneysel Çalışmalar
(3)
GA ve PSO ile bulunarak tablo 4’te verilen PID kontrolör
parametreleri ile kontrol edilen sistem ve modele farklı
referans değerlerde basamak girişler uygulanarak elde edilen
cevaplar şekil 9 ve şekil 10’da gösterilmektedir [9].
Burada;
k: örnek sayısı,
n: toplam veri sayısı,
845
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Şekil 9. Belirli Basamak Girişler için Sistemin GA-PID ve PSO-PID Cevapları
Şekil 10. Belirli Basamak Girişler için Modelin GA-PID ve PSO-PID Cevapları
Sistem ile model üzerinde GA-PID ve PSO-PID kontrolörler ile 164 rpm, 219 rpm ve 247 rpm değerlerindeki basamak girişler ile
yapılan çalışmalarda yükselme zamanı, yerleşme zamanı, maksimum aşım, sistem ve model çıkışları ve kontrol sinyalleri arasındaki
regresyon değeri tablo 5'te verilmiştir.
846
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Tablo 5. Belirli Referanslar için Sistem ve Modelin GA-PID ve PSO-PID Sonuçları
Referans
(rpm)
164
219
247
Kontrolör
GA-PID
PSO-PID
GA-PID
PSO-PID
GA-PID
PSO-PID
Yükselme Zamanı
(sn)
Yerleşme Zamanı
(sn)
Sistem
0.04060
0.10257
0.09616
0.10684
0.09830
0.10684
Sistem
0.52
0.67
0.86
0.69
0.73
0.75
Model
0.04273
0.10043
0.10043
0.10898
0.10257
0.11325
Model
0.52
0.47
0.45
0.52
0.52
0.47
Maksimum Aşım
(%)
Sistem
14.70
7.71
13.60
8.49
10.90
6.35
Model
15.30
5.77
9.14
4.38
6.45
2.51
Sistem ve
Model
Çıkışları
Regresyon
0.99501
0.99380
0.99655
0.99666
0.99644
0.99754
Sistem ve Model
Kontrol
Sinyalleri
Regresyon
0.90738
0.95108
0.91169
0.96245
0.84122
0.94447
regresyon değerine göre ise PSO-PID kontrolörün GA-PID
kontrolörden daha iyi bir performans sergilediği görülmüştür.
Şekil 9 ve şekil 10’dan yararlanılarak oluşturulan tablo 5’deki
veriler incelendiğinde yükselme zamanı kriterine göre GAPID kontrolörün PSO-PID kontrolörden daha iyi sonuç
verdiği görülmektedir. Yerleşme zamanı kriterine göre
kontrolörler arasında kıyaslama yapılabilecek bir istikrar
bulunmamaktadır. Maksimum aşım kriterine göre PSO-PID
kontrolörün GA-PID kontrolörden daha iyi sonuç verdiği
görülmektedir.
Kaynakça
[1] İstif, İ. ve Kutlu, K., "Elektro Hidrolik Bir Servosistemin
PD Kontrolü", Ulusal Makine Teorisi Sempozyumu,
Yıldız Teknik Üniversitesi, İstanbul, 509-516, 1995.
[2] Bercan, M. R., Kuzucu, A. ve Kutlu, K., "Hidrolik
Konum Kontrol
Sistemlerinin
Gerçeğe Yakın
Benzetimi.", Tr. J. of Engineering and Environmental
Sciences, TÜBİTAK, 22, 125-130, 1998.
[3] İstif, İ., Kutlu, K. ve Sağırlı, A., "Servovalf Kontrollü Bir
Hidrolik Motor Sisteminin Modellenmesi Ve Konum
Kontrolü", 10. Ulusal Makina Teorisi Sempozyumu,
Selçuk Üniversitesi, 451-458, 2001.
[4] Şengirgin, M., "Elektohidrolik Valf Denetimli Motor
Sisteminde Açısal Hız Denetimi", III. Ulusal Hidrolik
Pnömatik Kongresi Ve Sergisi, 391-399, 2003.
[5] Bahadır, Ç., "Servo Elektronik Valfler ile Hidrolik
Asansörde Hız Kontrolü", Yüksek Lisans Tezi, İstanbul
Teknik Üniversitesi, 2008.
[6] Katrancıoğlu, S., Yılmaz, E. ve Baba, A., F., "Trajectory
Tracking Speed Control of Hydraulic Motor with Fuzzy
Logic and PID Algorithms", The 2nd International
Symposium on Computing in Science & Engineering
(ISCSE), 2011.
[7] Katrancıoğlu, S., Savaş, K. ve Erdal, H., "A Modular
And Low-Cost Data Acquisition Card Design With
Multitasking Support", Procedia - Social and Behavioral
Sciences, 2, 2, 5266–5270, 2010.
[8] Ünal, M., "PID Kontrolörün Karınca Kolonisi / Genetik
Algoritma Tabanlı Optimizasyonu ve Gunt Rt 532 Basınç
Prosesinin Kontrolü", Yüksek Lisans Tezi, Marmara
Üniversitesi, Fen Bilimleri Enstitüsü, 2008.
[9] Yılmaz, E., "Hidrolik Bir Sistemin Yapay Sinir Ağları ile
Modellenmesi ve Katsayıları Genetik ve Parçacık Sürü
Optimizasyonu Algoritmaları ile Optimize Edilmiş PID
ile Kontrolü", Yüksek Lisans Tezi, Marmara Üniversitesi,
Fen Bilimleri Enstitüsü, 2012.
[10] Ünal, M., Erdal, H. ve Topuz, V., "Trajectory Tracking
Performance Comparison Between Genetic Algorithm
And Ant Colony Optimization For PID Controller
Tuning On Pressure Process", Computer Application in
Engineering Education, 2010.
5. Sonuçlar
Bu çalışmada hidrolik eğitim setinin üzerinde bulunan
hidrolik motorun sisteminin YSA ile dinamik modellenmesi
çıkartılması, GA ve PSO kullanılarak sistemin kontrol
algoritması olan PID’in parametrelerinin optimal değerlerinin
bulunması, elde edilen parametreler ile oluşturulan GA-PID ve
PSO-PID ile sistem ve modelin farklı referanslarda
çalıştırılarak karşılaştırılması verilmiştir.
Hidrolik güç kaynağı, servo hidrolik valf ve hidrolik
motordan oluşan sistemin modellenmesi için YSA
kullanılmıştır. Sistemin YSA modeline önceki modlarının da
eklenmesi için seri-paralel ileri tip modelleme yöntemi
seçilmiştir. Sistem modelinin belirlenmesi için farklı nöron
sayılarında ve farklı geçmiş mod sayılarından deneyler
yapılmıştır. YSA ile elde edilen modellerden performans
değeri 0.99896 olarak hesaplanan ve model parametreleri gizli
katmandaki nöron sayısı 30, geçmiş mod sayısı 20 olan model
sistemin YSA modeli olarak kullanılmıştır.
Sistemin ve modeli kontrolü PID kontrolör ile
sağlanmıştır. PID kontrolörün parametrelerinin optimal
değerleri GA ve PSO yöntemleri ile bulunmuş ve tablo 4'te
verilmiştir. Bulunan bu değerler ile GA-PID ve PSO-PID
kontrolörleri elde edilmiştir.
Sistem ve model GA-PID ve PSO-PID ile farklı referans,
164 rpm, 219 rpm ve 247 rpm, değerlerinde çalıştırılarak bu
deneylerin sonuçları yükselme zamanı, yerleşme zamanı,
maksimum aşım, sistem ve model çıkışları ve kontrol
sinyalleri arasındaki regresyon değeri kriterlerine göre
değerlendirilmiştir.
Yükselme zamanı kriterine göre, GA-PID hem sistem hem
de modelde PSO-PID'e göre daha başarılı olmuştur. Yerleşme
zamanı kriterine göre, GA-PID ve PSO-PID arasında istikrarlı
bir kıyaslama söz konusu olmamıştır. Maksimum aşım ve
kriterine göre PSO-PID kontrolörün GA-PID kontrolörden
hem sistem hem de modelde daha iyi sonuç vermiştir. Sistem
ve model çıkışları arasındaki regresyon değeri kriterine göre
kontrolörler arasında bir kıyaslama yapılamamaktadır. Son
kriter olan sistem ve model kontrol sinyallerine arasındaki
847
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
CFOA İle Oransal Ağırlıklı PID Denetleyici Tasarımı
Mehmet Sağbaş1, Muhammet Koksal2, Umut Engin Ayten 3
1
Elektrik-Elektronik Mühendisliği Bölümü
Yeni Yuzyil Üniversitesi, Zeytinburnu, İstanbul
[email protected]
2
Elektrik-Elektronik Mühendisliği Bölümü
Haliç Üniversitesi, Şişli, İstanbul
[email protected]
3
Elektronik ve Hab. Mühendisliği Bölümü
Yıldız Teknik Üniversitesi, Esenler, İstanbul
[email protected]
diyagramdan devrenin gerçekleştirilmesine dayanmaktadır.
Bu sebepten dolayı kuvvetlendirici, integral alıcı, türev alıcı
ve ağırlık toplayıcı devrelerine ihtiyaç vardır. Bu da önerilen
devrelerde kullanılan aktif ve pasif eleman sayılarının çok
fazla olmasını sağlamıştır.
Ayrıca Yüce vd. sırasıyla, iki ve üç pozitif tip ikinci nesil
akım taşıyıcı, ayrıca beş veya altı adet pasif eleman kullanarak
PID denetleyici tasarlamışlardır [15,16]. 2006 yılında Yüce ve
Minaei, akım modlu iki-girişli iki-çıkışlı, pasif eleman
seçimlerine göre PID denetleyici veya enstrümantasyon
kuvvetlendirici olarak çalışabilen aktif devre yapısı
önermişlerdir [17]. Yapıda sadece bir aktif eleman kullanılmış
olmasına rağmen, kullanılan çift çıkışlı ikinci nesil akım
taşıyıcı ticari olarak temin edilebilen bir aktif eleman değildir
ve iki adet ticari olarak temin edilebilen CFOA kullanılarak
gerçekleştirilebilmektedir. Ayrıca ters bant-geçiren filtre
yapıları PID denetleyici olarak kullanılabilmelerine rağmen,
literatürde önerilen yapılar iki ve daha fazla aktif elemandan
oluşmaktadırlar [18-24].
Bu çalışmada, ticari olarak temin edilebilen sadece bir
aktif eleman (CFOA) kullanılarak PID denetleyici
gerçeklemesi için yeni bir yöntem önerilmiştir. Önerilen
devrede ayrıca iki direnç ve iki sığaç kullanılmakta olup düşük
empedanslı gerilim çıkış özelliğine sahiptir. Önerilen PID
denetleyici 2. Bölüm’de verilmiş. 3. Bölüm’de tasarım
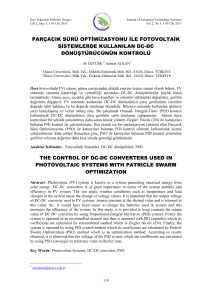
eşitlikleri tartışılmış, 4. Bölümde PSPICE benzetim sonuçları
verilmiştir. 5. Bölümde elde edilen sonuçlar tartışılarak
çalışma sonuçlandırılmıştır.
Özetçe
Bu çalışmada, ticari olarak üretilen aktif elemanlardan birisi
olan geri beslemeli işlemsel kuvvetlendiricisi (Current
Feedback Operational Amplifier, CFOA), iki tane direnç ve iki
tane sığaç kullanılarak, Oransal-İntegral-Türev (ProportionalIntegral-Derivative,
PID)
denetleyici
tasarımı
gerçekleştirilmiştir. Tasarlanan PID denetleyici devresi,
yüksek empedans gerilim girişine ve düşük empedans gerilim
çıkışına sahip olduğu için diğer gerilim modlu yapılarla
ardışık olarak bağlanmaya uygundur. Ayrıca çalışmada akım
geri beslemeli işlemsel kuvvetlendiricinin idealsizlik etkileri
analiz edilmiş ve önerilen yapının çalışmasını kanıtlamak için
gerekli benzetim çalışmaları PSPICE devre benzetim programı
kullanılarak yapılmıştır.
Anahtar Kelimeler: Akım taşıyıcılar, PID denetleyici, Akım
geri beslemeli işlemsel kuvvetlendirici, PID, AD844.
1. Giriş
PID denetleyici tasarımı, kontrol sistemleri alanında çok
kullanılan ve ilgi gören bir yöntemdir. PID denetleyici
tasarımı basit ve ucuz olup, PID parametrelerin ayarlanması
kolaydır [1].
CFOA, ikinci nesil akım taşıyıcılar (Second Generation
Current Conveyors, CCIIs), gerilim izleyicili akım farkı
kuvvetlendiriciler (Current Differencing Buffered Amplifiers,
CDBAs), (Current Feedback Transconductance Amplifiers,
CBTAs) gibi akım taşıyıcı ve akım taşıyıcı tabanlı aktif
elemanlar kullanılarak, bağımlı kaynakların gerçekleştirilmesi,
empedans dönüştürücüler, jiratörler, osilatörler, aktif filtreler
gibi çeşitli aktif devre yapıları önerilmiştir [2-10]; ayrıca PID
denetleyici tasarımında da sıklıkla kullanılan kuvvetlendirici,
türev alıcı, integral alıcı ve ağırlık toplayıcı gibi çeşitli analog
hesaplama elemanları önerilmiştir.
İşaret akış diyagramları (İAD) kullanılarak gerçekleştirilen
analog PID denetleyici sentez işlemleri referans [11.-14.]’de
verilmiştir. Bu metot, verilen PID denetleyici transfer
fonksiyonundan işaret akış diyagramının çizilmesi ve bu
2. CFOA-tabanlı PID Denetleyici
CFOA ticari olarak temin edilebilen tümleşik devre olup
piyasada Analog Device AD844 olarak satılmaktadır. Şekil
1’de blok diyagramı görülmekte olup uç denklemleri aşağıdaki
gibidir [25].
iy=0, vx=vy, iz=±ix, vw=vz
(1)
İdeal durumda, CFOA’nın giriş empedansları y ucunda
sonsuz, x ucunda ise sıfırdır. Çıkış empedansları z ucunda
sonsuz ve w ucunda sıfırdır.
848
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Bu denklemler, önerilen PID denetleyicinin üç kazanç
parametresinin devredeki dört pasif elemanın (R1, R2, C1, ve
C2) değerlerinin uygun şekilde seçilmesi ile ayarlanabileceğini
göstermektedir. Bu seçim sonraki bölümde ayrıntılı bir şekilde
incelenecektir.
Şekil 1: CFOA’nin (AD844) blok diyagramı.
3. Tasarım Eşitliklerinin Bulunması
Genel bir PID denetleyicinin transfer fonksiyonu aşağıdaki
gibi yazılabilir [26].
PID denetleyici devresi için Denklem (5)’te ifade edilen
kazanç parametrelerine dayanarak,
gerekli özellikleri
tasarlamak için aşağıdaki tasarım metodu sırasıyla izlenebilir.
Denklem. (5b,c)’den,
T (s)
V2 (s)
1
KP KI KDs .
V1 (s)
s
(2)
C1
Burada, V1(s) giriş gerilimi; V2(s) çıkış gerilimi; KP oransal
kazanç sabiti, KI integral kazanç sabiti ve KD türev kazanç
sabitidir.
Önerilen gerilim modlu PID denetleyici devresi Şekil 2’de
görülmektedir ve sadece bir CFOA, iki direnç ve iki sığaç
elemanı içermektedir.
Önerilen devrenin transfer fonksiyonu aşağıda verilmiştir:
V2 (s) s 2 R1R2C1C2 s(R1C1 R2C2 2R1C2 ) 1
V1 (s)
s2R1C2
şeklinde yazılabilir. Sonuç olarak
parametreleri aşağıdaki gibi bulunur.
KP 1
PID
KP 1
1 R2
R
2KD KI 1 .
2 R1
R2
(7)
PID denetleyici tasarım gereksinimlerine göre, KD ve KI’nin
bağımsız olarak seçilebilen parametreler olduğunu farz
edersek, KP’nin minimum değeri aşağıdaki gibi hesaplanır;
(3)
(4)
denetleyicinin
1 C1 1 R2
,
2 C2 2 R1
(6a, b)
elde edilir. Bu denklemlerin Denklem (5a)’da kullanılmasıyla
Denklem (7) elde edilir.
Denklem (3) yeniden düzenlenirse,
V2
RC R C
1 1 R2C1
[1 1 1 2 2 ]
s
V1
2R1C2
2R1C2 s
2
1
2K D
, ve C2
.
2R1KI
R2
R2
x olarak seçilirse
R1
(8a)
2K D K I
1
KP 1 x
.
2
x
(8b)
Denklem (8b)’den KP’nin minimum değeri x’in aşağıdaki
değeri için elde edilir
x 2 KD KI .
(5a)
(9)
Sonuç olarak, KP’nin minimum değeri Denklem (10)’daki
gibi bulunur.
KI
1
,
2R1C2
(5b)
KD
R2C1
.
2
(5c)
K pm 1 2 K D K I .
(10)
Denklem (10)’dan görüleceği gibi KP’nin minimum değeri
KD ve KI’ye bağlıdır. Böylece önerilen metotta
KP (1 2 KDKI )
(11)
olup, ağırlıklı olarak oransal denetim katsayısı öne çıkar.
Denetleyici devresinin pasif bileşenleri ile ilgili PID kontrol
parametrelerinin belirlenmesi işlemi için, aşağıdaki adımlar
takip edilmelidir:
Denklem (8a)’dan,
R2=xR1
(12)
bulunur. Daha sonra Denklem (6a)’dan
C1
2K D
.
xR1
(13)
elde edilir. Denklem (8a) yeniden düzenlenirse Denklem (14)
x cinsinden ikil biçimde şeklinde yazılabilir;
Şekil 2: Önerilen PID denetleyici devresi.
849
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
x2 2(KP 1)x 4KDKI 0 .
(14)
Denklem (11)’deki şart nedeniyle Denklem (14)’ün daima
iki reel kökü vardır. Bunlar,
x1,2 (KP 1) (KP 1)2 4KD KI .
(15)
Sonuç olarak, Denklem (11)’i sağlayan KP, KI, KD
parametreleri için, pasif elemanlar ile ilgili tasarım
parametreleri aşağıdaki adımlarla bulunabilir:
i)
ii)
iii)
iv)
v)
Keyfi bir R1 seçilir,
Denklem (15)’ten x hesaplanır,
Denklem (12)’den R2 hesaplanır,
Denklem (13)’ten C1 hesaplanır,
Denklem (6b)’den C2 hesaplanır.
Şekil 3: CFOA’nın ideal olmayan modeli.
V2
1 R2 C1
1 1
R2C1s .
V1 (1 )
R1 C2 R1C2 s
4. İdeal Olmayan Durumda Analiz
Sonuç olarak PID denetleyicisinin parametreleri aşağıdaki
gibi ifade edilir
CFOA aktif elemanının idealsizlik etkileri göz alınırsa uç
denklemleri aşağıdaki gibi yeniden yazılabilir.
iy=0, vx=βvy, iz=αix, vw=γvz
R2 C1
K P 1
,
(
1
) R1 C2
(16)
Burada, β=1-εβ, γ=1-εγ; ve α=1-εα, sırasıyla ideal olmayan
gerilim ve akım kazançlarını göstermektedir. εβ, εγ; εα
parametreleri sırasıyla gerilim ve akım izleyici hatalarını
göstermekte olup düşük frekanslı uygulamalarda çok çok
küçük (<<1) kabul edilir. Yüksek frekans uygulamalarında
aktif elemanın frekans bağımlılığı da göz önüne alınmalıdır.
β=1-εv ve α=1-εi’dir. εv (|εv|<<1) ve εi (|εi|<<1), sırasıyla gerilim
ve akım izleyici hatalarını göstermektedir.
Şekil 3’te CFOA aktif elemanının giriş ve çıkış
empedanslarını göz önüne alan basit devre modeli
görülmektedir. CFOA, ideal pozitif tip CCII (CCII+) ve birim
kazançlı gerilim tampon devresinden oluşmaktadır. Şekildeki
pasif elemanlar CFOA’nın parazitik giriş ve çıkış empedans
etkilerini modellemek için kullanılmıştır.
Şekil 3’te görülen ve parazitik giriş ve çıkış empedansları
olarak temsil edilen direnç, kapasite ve endüktans
elemanlarının yanı sıra, CFOA aktif elemanının frekansa bağlı
akım ve gerilim izleme kazançları da önerilen PID denetleyici
devresinin ideal olmayan gerilim transfer fonksiyonu ve PID
denetleyici parametrelerini etkilemektedir. Şekil 3’te görülen
Ry ve Rz sırasıyla yüksek seviye giriş ve çıkış rezistansları, Rx
ve Rw ise yine sırasıyla düşük seviye giriş ve çıkış
rezistanslarıdır. Cy, Cx; Cz, sırasıyla giriş ve çıkış
kapasitansları ve son olarakta Lx, CFOA’nın x giriş ucundan
görülen endüktanstır. Bu parazitik elemanların AD844
tümdevresi için değerleri Ry= 10 MΩ, Rx= 50 Ω, Rw= 15 Ω,
Rz= 3 MΩ, Cy=2 pF, ve Cz= 4.5 pF’tır [25].
Denklem (16)’daki idealsizlik etkileri düşük frekanslar için
gözönününe alındığında, önerilen PID denetleyicisinin gerilim
transfer fonksiyonu aşağıdaki gibi elde edilir;
V2
V1 (1 )
s 2 R1R2C1C2 s(R1C1 R2C2
sR1C2
1
R1C2 ) 1
(18)
KI
KD
1
,
(1 ) R1C2
(1 )
R2C1 .
(19a)
(19b)
(19c)
Önerilen PID denetleyicinin ideal olmayan giriş (Z1) ve
çıkış empedanları (Z2) aşağıdaki gibidir.
Z1 Ry ||
1
, Z 2 Rw .
sC y
(20)
5. Benzetim Sonuçları
Şekil 2’de verilen CFOA tabanlı PID denetleyici devresinin
çalışması PSPICE devre benzetim programı kullanılarak
denenmiştir. Bu benzetimlerde, ticari olarak temin edilebilen
AD844 tümdevresi kullanılmış olup besleme gerilimleri VDD=VSS= 12 V alınmıştır [25]. Devredeki pasif devre elemanları
R1=R2=1 kΩ, C1=C2=1 nF olarak seçilmiştir. Bu değerlere
karşı düşen PID denetleyici parametreleri Kp=2, KI=5x105,
KD=5x10-7 olarak hesaplanmıştır. Devrenin, PSPICE devre
benzetim programı ile elde edilen kazanç frekans karakteristiği
Şekil 4’te görülmektedir. Şekilden görüleceği gibi teorik
sonuçlar ile benzetim sonuçları geniş bir frekans bandı (100
Hz - 3 MHz) boyunca neredeyse aynı çıkmıştır. Teorik ve
benzetim sonuçları arasındaki fark, AD844 tümleşik
devresinin 10 MHz’ten büyük frekanslar için idealsizlik
etkilerinden kaynaklanmaktadır [25]. Düşük frekanslardaki
fark ise Şekil 3’te görülen parazitik empedanslardan ve düşük
frekanslardaki akım ve gerilim izleyici hatalarından
kaynaklanmaktadır.
(17)
Denklem (17) yeniden düzenlenirse,
850
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Şekil 4: Seçilen parametreler için PID denetleyicinin frekans
cevabı.
Şekil 6: Uygulanan giriş gerilimine göre teorik ve benzetim
çıkış gerilimleri (Yükselme Zamanı: 40 ns).
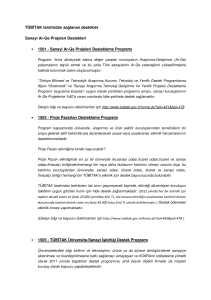
Önerilen PID denetleyicinin zaman bölgesi davranışını
göstermek için devrenin girişine tepe değeri 1 V ve yükselme
zamanı 100 ns olan birim basamak işareti uygulanmıştır. v2
çıkış ve v1 girişinin benzetim sonuçları Şekil 5’te verilmiştir.
[0-100] ns zaman aralığında önerilen denetleyicinin oransal
etkisi oldukça baskın çıkmıştır. 100. ns’de Girişin türevi ani
azalma gösterdiği için türev kontrol etkisiyle gerilim çıkışında
ani düşüş meydana gelmiştir. Son olarak 100 ns’den sonra
giriş gerilimi sabit kalırken integral kontrolün etkisiyle çıkış
gerilimi hemen hemen doğrusal olmuştur.
Benzetimler giriş gerilimi 1 V ve yükselme zamanı 40 ns
olan birim basamak işareti için tekrarlanmış olup sonuçlar
Şekil 6’da verilmiştir.
Pasif devre elemanları R1=R2=1 kΩ, C1=10 pF, C2=10 nF
olarak seçildiğinde ise PID denetleyicinin parametreleri
Kp≈1.5, KI=5.104 ve KD=5.10-9 olarak hesaplanmıştır. Teorik
ve benzetim sonuçlarının karşılaştırılması Şekil 7’de
verilmiştir.
Giriş ve çıkış empedansları AD844’ye bağlı olup 10 Hz –
100 MHz frekans aralığında önerilen devrenin giriş empedansı
11.11 MΩ olarak ölçülmüştür. Çıkış empedansı, 10 Hz
frekansında 15 Ω değerinde başlamış olup hemen hemen sabit
olarak kalıp 40.24 MHz frekansında 21.33 Ω değerine ulaştığı
görülmüştür. Ayrıca yapılan benzetimler göstermiştir ki
önerilen devrenin toplam güç tüketimi
0.16 W’tır. Önerilen
devrede kullanılan CFOA’nın gerçekleştirilmesinde AD844
yerine MOS transistorlar kullanılması durumunda yukarıda
ölçülen değerler doğal olarak daha da iyileşecektir.
Şekil 7: Seçilen parametreler için önerilen devrenin frekans
cevabı.
6. Sonuçlar
Bu çalışmada, sadece bir CFOA kullanılarak gerilim modlu
PID denetleyici devresi sunulmuştur. CFOA ticari olarak
temin edilebilen bir aktif eleman olup piyasada AD844 olarak
bilinmektedir. Önerilen devrede ayrıca pasif eleman olarak iki
direnç ve iki sığaç de kullanılmıştır. Çıkış empedansı düşük
empedans özelliğinde olduğu için önerilen devre, tampon
devresi kullanmaksızın diğer gerilim modlu yapılara ardışık
olarak bağlanma özelliğine sahiptir. Yapılan PSPICE
benzetimleri önerilen yapı için [10 Hz, 100 MHz] frekans
aralığında tutarlı ve tatmin edici sonuçlar vermiştir. Bu frekans
aralığı dışında kalan frekanslarda ise AD844 tümleşik
devresinin idealsizlik etkilerinden dolayı tutarsızlıklar
meydana gelmiştir.
Önerilen PID denetleyicinin düşük güç ve yüksek frekans
uygulamalarına uygun olmasına rağmen tek dezavantajı,
oransal denetim katsayısının integral ve türev kazanç sabitleri
tarafından belirlenen belirli bir düzeyin altına indirgenemez
olmasıdır. Bu nedenle, önerilen devre baskın oransal PID
denetleyici olarak adlandırılmıştır. Önerilen devrenin
parametrelerinin çok kolay şekilde tasarlanması ve çoğu
kontrol sistemlerinde oransal kontrolün baskın özellik
göstermesi ve bu dezavantajı bertaraf etmektedir.
Not: Bu bildirinin İngilizcesi uluslararası bir konferansta
daha önce sunulmuştur [27].
Şekil 5: Uygulanan giriş gerilimine göre teorik ve benzetim
çıkış gerilimleri (Yükselme Zamanı: 100 ns).
851
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
[14] A. U. Keskin, “Design of a PID controller circuit
employing CDBAs,” International Journal of Electrical
Engineering Education, Cilt: 43, no. 1, s:48–56, 2006.
[15] E. Yuce, S. Tokat, A. Kizilkaya, O. Cicekoglu, “CCIIbased PID controllers employing grounded passive
components,” International Journal of Electronics and
Communications, Cilt: 60, no. 5, s:399–403, 2006.
[16] E. Yuce, S. Tokat, S. Minaei, O. Cicekoglu, “Lowcomponent-count insensitive current-mode and voltagemode PID, PI and PD controllers,” Frequenz, Cilt: 60,
no. 3-4, s:29–33, 2006.
[17] E. Yuce, S. Minaei, “New CCII-based versatile structure
for realizing PID controller and instrumentation amplifier
Current Backward Transconductance Amplifier,”
Microelectronics Journal, Cilt: 41, s:311–316, 2010.
[18] N. Herencsar, A. Lahiri, J. Koton, K. Vrba,
“Realizations of second-order inverse active filters using
minimum passive components and DDCCs,” in
Proceedings of 33rd International Conference on
Telecommunications and Signal Processing - TSP 2010,
Vienna, Austria, 2010, s:38-41.
[19] S. S. Gupta, D. R. Bhaskar, R. Senani, “New analogue
inverse filters realized with current feedback op-amps,”
International Journal of Electronics, Cilt: 98, no. 8,
s:1103–1113, 2011.
[20] S. S. Gupta, D. R. Bhaskar, R. Senani, A. K. Singh,
“Inverse active filters employing CFOAs,” Electrical
Engineering, Cilt: 91, s:23–26, 2009.
[21] A. Leuciuc, “Using nullors for realisation of inverse
transfer functions and characteristics,” Electronic Letters,
Cilt: 33, s:949–951, 1997.
[22] B. Chipipop, W. Surakampontorn, “Realisation of current
mode FTFN-based inverse filter,” Electronic Letters,
Cilt: 35, s:690–692, 1999.
[23] H. Y. Wang, C. T. Lee, “Using nullors for realisation of
current mode FTFN-based inverse filters,” Electronic
Letters, Cilt: 35, s:1889–1890, 1999.
[24] M. T. Abuelma’atti, “Identification of cascadable currentmode filters and inverse-filters using single FTFN,”
Frequenz, Cilt: 54, s:11–12, 1999.
[25] Analog Devices, Linear products data book, Norwood,
Ma, 1990.
[26] B. C. Kuo, Automatic Control Systems, Prentice-Hall,
Upper Saddle River, NJ, 1997.
[27] M. Sagbas, M. Koksal, and U. E. Ayten, “Design of
dominantly proportional pid controller using single
commercially available active component,” Proc. of TSP
2013- 36th Int. Conf. on Telecommunications and Signal
Processing, IEEE, Czechinvest, pp. 427-430, Rome,
Italy, July 2-4, 2013.
Kaynakça
[1] S. Bennette, “Development of the pid controller,” IEEE
Control Systems Mag. Cilt: 13, s:58–65, 1993.
[2] A. M. Soliman, “Generation of CCII and CFOA filters
from passive RLC filters,” Int. Journal of Electronics,
Cilt: 85, s:293-312, 1998.
[3] S. Minaei, O. K. Sayin, H. Kuntman, “A new CMOS
electronically tunable current conveyor and its
application to current-mode filters,” IEEE Transactions
on Circuits and Systems Part-I: Regular Papers, Cilt: 53,
s:1448–1457, 2006.
[4] E.Yuce, S.Minaei, “Amodified CFOA and its
applications to simulated inductors, capacitance
multipliers, and analog filters,” IEEE Transactions on
Circuits and Systems Part-I: Regular Papers, Cilt: 55-1,
s:254–263, 2008.
[5] M. Koksal, U. E. Ayten, and M. Sagbas, “Realization of
new mutually coupled circuit using CC-CBTAs,”
Circuits, Systems and Signal Processing, Cilt: 31, no. 2,
s:435-446, 2012.
[6] W. Jaikla, M. Siripruchyanun, D. Biolek, and V.
Biolkova, “High output impedance current-mode
multiphase sinusoidal oscillator employing current
differencing transconductance amplifier based allpass
filters,” International Journal of Electronics, Cilt: 97, no.
7, s:811-826, 2010.
[7] M. Sagbas, “Design of CDBA Based Active Polyphase
Filter for Low-IF Receiver Applications,” Turkish
Journal of Electrical Engineering and Computer
Sciences, Cilt: 19, no. 4, s:565-574, 2011.
[8] M. Sagbas, U. E. Ayten, H. Sedef, and M. Köksal,
“Floating Immittance Function Simulator and Its
Applications,” Circuits Systems and Signal Processing,
Cilt: 28, no. 1, s:55-63, 2009.
[9] U. E. Ayten, M. Sagbas, N. Herencsar, J. Koton, “Novel
floating General Element Simulators Using CBTA,”
Radioengineering, Cilt: 21, no. 1, s:11-19, 2012.
[10] N. Herencsar, J. Koton, K. Vrba, A. Lahiri, U. E. Ayten,
M. Sagbas, “A new compact CMOS realization of
sinusoidal oscillator using a single modified CBTA” in
Proceedings of the 21st International Conference
Radioelektronika, Brno, Czech Republic, 2011, s:41 - 44.
[11] C. Erdal, H. Kuntman, and S. Kafali, “A current
controlled conveyor based proportional-integralderivative (PID) controller,” Istanbul University-Journal
of Electrical & Electronics Engineering, Cilt: 4, no. 2,
s:1243-1248, 2004.
[12] C. Erdal, A. Toker, and C. Acar, “A new proportionalintegral-derivative (PID) controller realization by using
current conveyors and calculating optimum parameter
tolerances,” Istanbul University-Journal of Electrical &
Electronics Engineering, Cilt: 1, no. 2, s:267-273, 2001.
[13] C. Erdal, A. Toker, and C. Acar, “OTA-C Based
Proportional-Integral-Derivative (PID) Controller and
Calculating Optimum Parameter Tolerances,” Turkish
Journal of Electrical Engineering, Cilt: 9, no. 2, s:189198, 2001
852
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Kesir Dereceli PID Denetleyicisinin Elektronik Devre Tasarımı
Özkan ATAN1, Mustafa TÜRK2, Remzi TUNTAŞ1
1
Elektronik Haberleşme Bölümü
Yüzüncü Yıl Üniversitesi, Van
[email protected],rtu
2
Elektrik Elektronik Mühendisliği Bölümü
Fırat Üniversitesi, Elazığ
[email protected]
yaklaşımından
faydalanarak
gerçekleştirilen
devre
modelidir[14-17]. Bu çalışmaların temelinde Ahmad ve Sprott
[18] tarafından yapılan çalışma bulunmaktadır. Bu
yaklaşımlardan
yola
çıkarak
kaotik
sistemler
tasarlanabilmektedir ve KD kaotik devre modelleri
oluşturulabilmektedir.
Bu çalışmada KD sistem Matlab/Simulink modelleri
oluşturulup iki kaotik sistem arasında senkronizasyon
denetimi gerçekleştirilmiştir. Denetleyici olarak KDPID
kullanılmıştır. Ayrıca KD devre modelinden yararlanılarak KD
iki kaotik sistem oluşturulmuş ve bu sistemlerin
senkronizasyon denetimi için yine KDPID denetleyicinin
devre modeli gerçekleştirmiştir elde edilen sonuçlar
karşılaştırılmıştır.
Özetçe
Bu çalışmada kesir dereceli PID (KDPID) denetleyicisi
elektronik devre elemanlarıyla gerçekleştirilmiştir. Kesir
dereceli sistemlerin analog olarak gerçekleştirilmesi için
Crone yaklaşımı kullanılarak elde edilen transfer fonksiyonu,
direnç ve kondansatör gibi pasif devre elemanları kullanılarak
elde edilmiştir. Yine bu devre modelinden yola çıkarak, kesir
dereceli bir kaotik lorenz sisteminin devre modeli
oluşturulmuş ve bu kaotik devrelerin senkronizasyon denetimi
yapılmıştır. Denetleyicinin katsayı ve derecelerinin
belirlenmesi için bulanık parçacık sürü optimizasyon modeli
kullanılmıştır. Elde edilen modelin uygulanabilir olduğu ve
senkronizasyon
denetiminde
iyi
sonuçlar
verdiği
gözlenmektedir.
1.
2.
Giriş
Kesir dereceli (KD) sistemlerin 17yy’dan beri bilinmesine
rağmen, mühendislik alanında ilk uygulamaları 21yy’ın
başlarında gerçekleştirilmiştir [1]. KD sistemler; nonlineer
sistemler, sinyal işleme, kontrol sistemleri gibi birçok alanda
uygulamaları bulunmaktadır. KD sistemlerin üzerine yapılan
araştırmalar; KD kaotik sistemler, kaotik senkronizasyon ve
kaos denetimi ve KD denetleyici üzerinde yoğunlaşmaktadır.
KD sistemlerin denetim sistemlerinde ki uygulamaları;
kararlık, parametre belirlenmesi ve tasarımı gibi sıralanabilir
[2-7]. KD sistemlerin lineer olmayan devre modellemeleri ve
gerçekleştirmeleri üzerine araştırmalar ise hala sürmektedir.
Literatürde; KD kontrol sistemlerinin en yaygın türü KDPID
ve KD kayan kip kontrol yöntemleridir [8-11]. KDPID
denetleyicide bulunan türev veya integral operatörünün tam
sayı dışında herhangi bir reel sayı olması prensibine dayanır.
Bu kontrol sistemleri klasik kontrol sistemleriyle
karşılaştırıldığında daha dayanıklı denetim sağladığı
literatürde ki birçok çalışmada görülmektedir [12]. KDPID
denetleyicilerin en önemli dezavantajları ise denetleyici
parametrelerinin
belirlenmesi
ve
denetleyicilerin
gerçekleştirilmesidir [7,13]. KDPID tipi denetleyiciler lineer
olmayan sistemlerin denetiminde iyi sonuçlar vermektedir. Bu
nedenle kaotik sistemlerin denetiminde de iyi sonuçlar
vermesi beklenmektedir.
Bu tür denetleyicileri gerçekleştirilmesi için çeşitli
yaklaşımlar kullanılmaktadır. Bunlardan biride crone
2.1.
Kesir Dereceli Hesaplama Yöntemi ve
Kesir Dereceli Denetleyiciler
Kesir Dereceli Hesaplama Yöntemi
17yy. KD sistemlerin keşfinden sonra bu tür sistemlerin
analizi üzerine birçok farklı çalışma yapılmaktadır. Bunları en
yaygın bilinenleri; Grunwald–Letnikov’ un Denklem (1)’de
verilen, ayrık sistemler için kullanılan yöntem ve Denklem
2’de verilen sürekli sistemler için kullanılan Riemann–
Liouville yöntemdir.
[(t a)/ h] ( k )
1
f ( x kh) (1)
a Dt f (t ) Lim
h ( )h k 0 (k 1)
a Dt f (t )
m
f ( )
d t
d
(m ) dt a (t )1(m )
1
(2)
Bir başka çözüm yöntemi ise Laplace dönüşüm yöntemidir.
Laplace dönüşüm yönteminde başlangıç değeri sıfır kabul
edildiğinde;
d f (t )
s F (s)
dt
( )
L I
f (t ) s F ( s )
L
, R
853
(3)
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
şeklinde bir eşitlik elde edilir. Burada sµ ve sλ şeklindeki
ifadenin değeri, Crone yaklaşımıyla transfer fonksiyonuna
dönüştürülür.
s
1
N
z ,a
s C
a 1 1 s
p,a
(2a 1 )
(4)
z ,a l ( h ) 2 N
l
(2a 1 )
p,a l ( h ) 2 N
l
Şekil 1: Kesir dereceli devre modeli
Örnek olarak derecesi 0.9 olan bir sistemin transfer
fonksiyonu Denklem 7’da verilmiştir. Bu transfer
fonksiyonundan yola çıkarak elde edilen KD devre modeli
Şekil 3’de verilmiştir. Devre 3 direnç ve 3 kondansatörden
oluşmaktadır. Direnç ve kondansatör sayısı transfer
fonksiyonuna göre seçilir.
burada C0, ωh ve ωl aşağıda verildiği gibi seçilmelidir.
0
C0
l
h
0, (0,1)
2.2.
(5)
s 0.9
KDPID Denetleyicileri
( s 0.01292)( s 2.154)( s 359.4)
2.26( s 1.29)( s 215.4)
(7)
KDPID, KDPID denetleyicisinde bulunan türev ve integral
operatörlerinin derecesi herhangi bir reel sayı olan KD
denetleyicidir. Klasik PID denetleyicisi de aslında türev ve
integral derecesi 1’ eşit olan bir KDPID denetleyicisidir.
KDPID denetleyicisi Denklem (6)’de verilen transfer
fonksiyonuna sahiptir.
G(s) K p
, R
1
s
Td s
Ti
(6)
, 0
Şekil 2: Derecesi 0.5 olan bir türev alıcı devrenin
yapısı
Burada Kp oransal katsayı, Ti integral sabiti, Td türev sabiti
ve µ, λ sırasıyla türev ve integral sabitleridir. KDPID
denetleyici için bu parametrelerin ayarlanması, denetleyicinin
performansı için önemli bir rol oynamaktadır. Bu katsayılar
belirlenmesi için çeşitli yöntemler vardır. Bu yöntemlerden
bazıları akıllı sistemlere dayalı hesaplama yöntemidir ki bunlar
başarılı sonuçlar verdiği daha önceki çalışmalarda açıkça
gözlenmektedir[19].
3.2.
Kesir Dereceli Denetleyicilerinin Devre Modeli
KD denetleyiciyi elektronik olarak tasarımı için literatürdede
[20-22] kullanılan yöntemle denetleyici modeli tasarlanmıştır.
Burada kondansatör ve direnç değerleri FAPSO yöntemine
[19] göre optimize edilen denetleyici katsayı ve derecelerine
göre seçilmiştir. Bu model Şekil 3’de gösterilmiştir.
3. Kesir Dereceli Sistemlerin Devre Modeli
ve Denetleyicilerin Gerçekleştirilmesi
3.1.
Kesir Dereceli Sistemlerin Devre Modeli
KD sistemin devre modelini oluşturmak için KD türev ve
integralin Laplace yöntemine göre elde edilen transfer
fonksiyonundan yararlanılır. Literatürde bu alanda yapılan
çeşitli modeller bulunmaktadır. Bunlardan biride Şekil 1’de
verilen, Wang ve Liu tarafından oluşturulan devre modelidir.
Şekil 3: KD PID denetleyicisinin devre modeli
854
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Denetleyicinin denetim parametreleri Tablo 1’de
verilmiştir. Burada kesir derecesini transfer fonksiyonuna
çevirirken 3. dereceden transfer fonksiyonuna çevrilerek
tasarım yapılmıştır.
R29
R31
R35
C12
C10
C11
R34
R30
2
11
U6A
R36
U6B
R32
1
6
R37
11
3
R33
7
4
9
11
5
U6C
8
4
10
4
R38
C14
R39
R41
R43
Tablo 1: Denetleyici dereceleri ve parametreleri
X1
X2
Y1
Y2
u(t)
VS+
W
Z
VS-
13
C13
11
R44
U6D
14
R42
2
11
12
R45
U7A
R46
1
4
6
11
3
R72
U7B
7
4
5
4
C17
R56
R54
R50
C18
C16
R48
6.25
0.025
50
0.88
0.98
U10
X1
X2
Y1
Y2
VS+
W
Z
VS-
R55
9
11
U7C
8
R53
13
11
10
U7D
R51
R52
14
4
R49
2
11
12
U8A
1
4
3
4
Global
4.
R40
Değerleri
KDPID parametre
ve dereceleri
Kp
Ki
Kd
λ
µ
C15
R47
U9
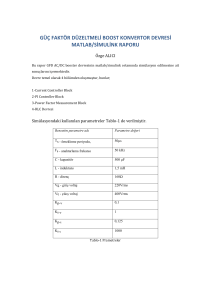
Şekil 5: Slave kaotik devre
Kesir Dereceli Denetleyici ile Lineer
Olmayan Kesir Dereceli Devrenin
Senkronizasyon Denetimi
Master ve Slave adlı iki KD kaotik sistemlerin (Denklem 8 ve
Denklem 9’da matematiksel modelleri verilen) denetimi
KDPID ile gerçekleştirilecektir.
d x1
( x1 y1 )
dt
d y1
(8)
x1 y1 x1 z1
dt
d z1
z1 x1 y1
dt
Şekil 6. KDPID denetleyici modeli
d x2
( x2 y2 )
dt
5. Simülasyon Sonuçları
d y2
x2 y2 x2 z2 u (t )
dt
(9)
Master kaotik devrenin x1 çıkış işareti Şekil 7’de
gösterilmektedir. Denetim olmaksızın slave devrenin çıkışı,
olan x2 işareti ise Şekil 8’de gösterilmektedir. Bu iki işaret
karşılaştırıldığında başlangıç durumu farklı olan kaotik
devrelerin öngörüldüğü gibi farklı işaretler ürettiği
gözlenmektedir.
d z2
z2 x2 y2
dt
Burada (Denklem (9)’da) verilen eşitlikteki u(t)
denetleyici girişi olup, senkronizasyon hatasına göre
denetleyici tarafından giriş sinyali üretilir. Yukarıda verilen
Denklem 8 ve Denklem 9’den yola çıkarak oluşturulan
elektronik devre modeli Şekil 4 ve Şekil 5’de gösterilmiştir.
Bu iki devrenin kaotik senkronizasyonu sağlamak için
kullanılan denetleyici modeli Şekil 6’da gösterilmiştir.
R1
C2
R3
R7
C1
C3
R6
R2
2
U1A
11
R8
U1B
R4
1
6
R9
11
3
R5
7
4
9
U1C
11
5
8
4
10
4
R10
C5
R11
R13
R15
C4
C6
R19
U4
X1
X2
Y1
Y2
R12
VS+
W
Z
VS-
13
11
R16
U1D
14
R14
2
11
12
U2A
R18
1
4
R17
6
U2B
11
3
7
4
5
4
C8
R28
R26
R22
C9
C7
R20
U5
X1
X2
Y1
Y2
VS+
W
Z
VS-
R27
9
11
U2C
8
R25
13
11
10
U2D
R23
14
4
R24
R21
2
11
12
U3A
1
4
3
4
Şekil 7: Master kaotik sistemin çıkışı
Şekil 4: Master kaotik devre
855
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Şekil 10: KDPID denetleyicisi kullanıldığında oluşan
senkronizasyon hatası
Şekil 8: Slave kaotik sistemin çıkışı
Senkronizasyon için klasik PID yöntemi kullanıldığında
hatanın zamana göre değişimi Şekil 9’da gösterilmektedir.
KDPID ile yapılan denetim sonucu hatanın değişimi Şekil
10’da gösterilmiştir.
6.
Sonuçlar
Literatürde bulunan KD sistemlerin elektronik olarak
gerçekleştirilmesi, bu çalışmada KDPID denetleyicisi
gerçekleştirmek için kullanılmıştır. Ayrıca oluşturulan devre
modeli iki KD kaotik lorenz sisteminin senkronizasyonu için
kullanılmıştır. Elde edilen sonuçlara göre senkronizasyon 1ms
gibi kısa sürede gerçekleştiği gözlenmektedir. Ayrıca klasik
PID
yöntemine
göre
daha
hızlı
senkronizasyon
gerçekleştirdiği gözlenmektedir. KDPID elektronik devre
elemanlarıyla tasarlanabildiği ve denetim sistemlerinde
başarılı sonuç verdiği simülasyon sonuçlarında görülmektedir.
Kaynakça
1.
I, Podlubny, “Fractional-Order Systems and PIλDµ
Controllers” IEEE Transactions on Automatic Control, Cilt:
44, No: 1, s:208-214, 1999.
2.
B, Vinagre, I, Podlubny, A, Hernandez, ve V, Feliu,
“Some Approximations of Fractional Order Operators Used in
Control Theory and Applications” Fractional Calculus and
Applied Analysis, Cilt:3, No:3, s:231-248, 2000.
3.
I, Podlubny, I, Petráš, B.M, Vınagre, P, O’leary ve
L, Dorˇcák, “Analogue Realizations of Fractional-Order
Controllers” Nonlinear Dynamics, Cilt:29, No:1, s:281–296,
2002.
4.
H, Özbay, C, Bonnet ve A.R, Fioravanti,
“PID controller design for fractional-order systems with time
delays” Systems & Control Letters, Volume, Cilt:61, No:1,
s:18-23, 2012.
5.
Y, Tang, M, Cui, C, Hua, L, Li ve Y, Yang,
“Optimum design of fractional order PIλDμ controller for AVR
system using chaotic ant swarm” Expert Systems with
Applications, Cilt:39, No:8, s:6887-6896, 2012.
6.
T, Vinopraba, N, Sivakumaran, S, Narayanan ve
T.K, Radhakrishnan “Design of internal model control based
Şekil 9. Klasik PID denetleyicide oluşan
Senkronizasyon hatası
856
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
fractional order PID controller” Journal of Control Theory and
Applications, Cilt: 10, No:3, s:297-302, 2012.
7.
S.E. Hamamci, An algorithm for stabilization of
fractional-order time delay systems using fractional-order PID
controllers, IEEE Transactions on Automatic Control, Cilt: 52,
No:10, s:1964–1969, 2007.
8.
M.Ö, Efe, “Fractional Order Sliding Mode
Controller Design for Fractional Order Dynamic Systems”
New Trends in Nanotechnology and Fractional Calculus
Applications, 2010, s: 463-470.
9.
M.Ö, Efe, “A Sufficient Condition for Checking the
Attractiveness of a Sliding Manifold in Fractional Order
Sliding Mode Control” Asian Journal of Control, Cilt:14,
No:4, s:1118–1122, 2012.
10.
D, Wang ve X, Gao, “H∞ Design with Fractional
Order Controllers” Automatica, Cilt: 48, No:5, s: 974-977,
2012.
11.
F, Zhou, Y, Zhao, Y, Li ve Y, Chen, “Design,
Implementation and Application of Distributed Order PI
Control” ISA Transactions, In Press, 2013.
12.
H.S, Li, Y, Luo ve Y.Q, Chen, “A Fractional Order
Proportional and Derivative (FOPD) Motion Controller:
tuning rule and experiments” IEEE Transactions on Control
Systems Technology, Cilt:18, No:2, s:516–520, 2010.
13.
S.E, Hamamci ve M, Koksal, “Calculation of All
Stabilizing Fractional Order PD Controllers for Integrating
Time Delay Systems” Computers & Mathematics with
Applications, Cilt:59, No:5, s:1630–1636, 2010.
14.
H, Cao, R, Zhang ve F, Yan, “Spread spectrum
communication and its circuit implementation using
fractional-order chaotic system via a single driving variable”
Communications in Nonlinear Science and Numerical
Simulation, Cilt: 18, No:2, s: 341-350, 2013
15.
H.F, Cao ve R.X, Zhang, “Parameter Modulation
Digital Communication and Its Circuit Implementation Using
Fractional Order Chaotic System Via a Single Driving
Variable, Acta Physics, Cilt: 61, No:2, p. 020508/1-8, 2012.
16.
R, Zhang, ve S, Yang, “Chaos in fractional-order
generalized Lorenz system and its synchronization circuit
simulation” Chine Physics B, 18 (2009), pp. 3295–3303.
17.
R.X, Zhang ve S.P, Yang, “Chaos in the fractionalorder generalized Lorenz system and its synchronization
circuit simulation” Chine Physics B, Cilt:18, No:8, s: 3295–
3302, 2009.
18.
W.M, Ahmad ve J.C, Sprott, “Chaos in fractionalorder autonomous nonlinear systems” Chaos, Solitons and
Fractals, Cilt:16, No:2, s:339-351, 2003.
19.
F.Q, Wang ve C.X, Liu, “A new multi-scroll chaotic
generator” Chinese Physics, Cilt:16, No:4, s:942-946, 2007.
20.
C.X, Rong, L.C, Xin ve W.F, Qiang, “Circuit
realization of the Fractional Order Unifed Chaotic System”
Chinese Physics B, Cilt:17, No:5, s:1664-1669, 2008.
21.
D, Chen, C, Liu, C, Wu, Y, Liu, X, Ma, Y, You, “A
New Fractional-Order Chaotic System and Its Synchronization
with Circuit Simulation” Circuits Systems and Signal
Processing, Cilt:31, No: 5, s:1599–1613, 2012.
22.
Ö, Atan, M, Türk, ve R, Tuntaş, “Kesir Dereceli
Denetleyici Parametrelerinin Bulanık Adaptif Parçacık Sürü
Optimizasyon Yöntemi ile Belirlenmesi” Otomatik Kontrol
Türk Milli Komitesi- Otomatik Kontrol Ulusal Toplantısı,
Niğde, Türkiye, s: 2012.
857
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Model Taban Öngörülü Tepe Gözleyicisi Yöntemi ile PI
Kontrolör Tasarımı
E. Sahin1, M. Güzelkaya2, İ.Eksin3
1
Sürmene Abdullah Kanca Meslek Yüksek Okulu
Karadeniz Teknik Üniversitesi, Trabzon
[email protected]
2, 3
Kontrol ve Otomasyon Mühendisliği Bölümü
İstanbul Teknik Üniversitesi, 34469, Maslak, İstanbul
2
[email protected],
3
[email protected]
eklenerek ilk aşım değerinin daha düşük seviyelere çekilmesi
sağlanmıştır. Önerilen yöntemlerin başarımları çeşitli
sistemler üzerinde benzetim çalışmaları ile karşılaştırmalı bir
şekilde gösterilmiştir.
Özetçe
Bu çalışmada, tepe gözleyicisi yöntemi klasik PI kontrol
yapısına uyarlanarak uygulanmıştır. Tepe gözlemleyicisi
yöntemi ilk olarak PID tipi bulanık mantık kontrol
yapılarında kullanılmıştır. Yöntemin temel prensibi aşım
değerlerinden yaralanarak kontrol parametrelerini uygun bir
biçimde değiştirip sistem başarımını arttırmaktır. Bu
çalışmada, tepe gözleyicisi yöntemi içsel model kontrol
yöntemi ile tasarlanmış klasik PI kontrol yapısına ilişkin
aşımlı sistem yanıtlarını düzeltecek bir şekilde yeniden ele
alınmıştır. Ayrıca, tepe gözleyicisi yöntemi geliştirilerek
model taban öngörülü bir yeni yapı önerilmiştir. Önerilen
yöntemlerin başarımları çeşitli sistemler üzerinde benzetim
çalışmaları ile karşılaştırmalı bir şekilde gösterilmiştir.
2. İçsel Model Kontrol Yöntemi
İçsel model kontrol yönteminde model mertebesi indirgenerek
PI ve PID kontrolör parametreleri basit analitik kurallar
kullanılarak ayarlanabilir [4]. Bu yöntem ile sistem
yanıtlarının gürültüye ve referans değişikliklerine karşı daha
dayanıklı olduğu gösterilmiştir. Bu yöntemde, ilk olarak
modeli bilinen sistemin yaklaşık sistem modeli, model
indirgeme kuralları uygulanarak birinci dereceden veya ikinci
dereceden ölü zamanlı olarak elde edilir. Birinci mertebeden
ölü zamanlı yaklaşık sistem modeli kullanılarak PI kontrolör
parametreleri hesaplanır. Birinci mertebeden ölü zamanlı
yaklaşık sistem modelinin zaman sabiti ve ölü zamanın
hesaplanması için kullanılan ifadeler aşağıda gösterilmektedir.
1. Giriş
PID kontrolör basit, dayanıklı olması ve kontrol alanındaki
geniş uygulama çeşitliliği sayesinde endüstride yaygın olarak
kullanılmaktadır. Bu kontrolörlerin parametrelerini belirlemek
üzere birçok çalışma yapılmıştır [1,2,3]. İçsel model kontrol
(SIMC) yöntemi ile PID parametreleri tek bir değer
belirmesine indirgendiği bilinen bir gerçektir [4, 5].
1 10
0
Klasik PID kontrolörlerinde olduğu gibi bulanık PID
kontrolörlerinde de parametrelerinin ayarlanması üzerine
çeşitli yöntemler bulunmaktadır [6,7,8,9,10]. Tepe gözleyicili
öz-ayarlama yöntemi sistem yanıtında oluşan tepe ve ters tepe
değerlerinden yararlanarak bulanık PID kontrolöre ilişkin
ölçekleme çarpanlarını çevrimiçi olarak ayarlamayı
hedeflemektedir [6]. Yöntemde, sistem yanıtının ilk aşım
değerine ulaşılmasına izin vermekte, o andaki aşım değerine
bağlı olarak PID kontrolöre ilişkin, oransal, integral ve türev
katsayılarına karşı düşen ölçekleme çarpanlarını uygun
biçimde değiştirilmektedir.
20
(1)
2
20
2
i 0 T j0
i 3
j
h
2
(2)
Yukarıda verilen ifadelerde τ10, τ20 ve θ0 orijinal sistemin
zaman sabitlerini ve ölü zamanını, TJ0 sistemin var ise
sıfırlarını ve h örnekleme zamanını, ifade etmektedir. Örnek
olarak ikinci mertebeden ölü zamansız (3) sistemi ele
alınabilir.
G1 ( s)
1
( s 1)(0.2s 1)
(3)
(1) ve (2) de verilen ilişkiler kullanılarak elde edilen yaklaşık
sistem modeli (4)’te gösterilmektedir.
Bulanık PID kontrolörler için geliştirilmiş olan tepe
gözleyicisi yöntemi, literatürde ilk olarak bu çalışma ile klasik
PI kontrol yapısına uyarlanmıştır. Klasik PI kontrolörü içsel
model kontrol yöntemi ile tasarlanmış olup parametre
ayarlamaları tepe gözleyicisi mantığı ile yapılmıştır. Tepe
gözleyicisi yöntemine model taban öngörülü bir yeni yapı
g1 ( s)
858
1
e 0.1s
(1.1s 1)
(4)
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
uygulanmış olur. Düzeltme işlemine ilk tepe değerden sonra
her karşılaşılan tepe veya ters tepe (vadi) değerinde devam
edilir.
Yaklaşık sistem modelinin ve orijinal sistemin açık çevrim
birim basamak yanıtları Şekil 1'de gösterilmektedir. Sistem
yanıtından görüldüğü üzere orijinal sistemin ve yaklaşık
sistemin açık cevrim birim basamak yanıtları birbirlerine çok
yakındır.
1.4
1.2
1.2
1
Gercek sistem yanıtı
Yaklaşık sistem yanıtı
0.8
Genlik
Genlik
1
1. Tepede
hesaplanan
hata değeri
0.8
0.6
2.Tepede
hesaplanan
hata değeri
0.6
0.4
0.4
0.2
0.2
0
0
0
1
2
3
4
5
6
Zaman (San.)
7
8
9
1
1.5
2
2.5
3
Zaman (Sn.)
Tepe ve ters tepe anlarında hesaplanan
İçsel model kontrol yöntemi ile hesaplanmak istenen PI
kontrolör
parametrelerine
ilişkin
ifadeler
aşağıda
verilmektedir. Bu parametreler sıra ile oransal katsayı ve
integral zaman sabitidir.
0.5 1 0.5
'
k
k
3.5
4
4.5
5
j lamda
değerleri
Şekil 3'te gösterilmektedir. Bu yöntemin klasik PI kontrolüne
uyarlanmasında ise, kontrolör katsayılarını aşamalı olarak
küçültmek amacıyla tepe değerleri gittikçe azalan ve birden
küçük bir değer aldığından hesaplanan j lamda değerleri
doğrudan bir çarpan olarak kullanılmıştır. Sonuç olarak, tepe
değerlerinden sonra sisteme uygulanacak olan yeni kontrol
parametreleri aşağıda biçimde ifade edilebilir.
(5)
i min(1,8 )
0.5
Şekil 3: Üst ve alt tepe anlarında hesaplanan hatanın mutlak
değeri (δ katsayısı).
Şekil 1: Orijinal ve yaklaşık sistem modellerinin
karşılaştırılması.
kc
0
10
(6)
Yukarıda verilen ilişkiler yardımıyla örnek sistem için
hesaplanan oransal katsayı 5.5, integral zaman sabiti
0.8saniye olarak bulunmuştur. Sistemin birim basamak yanıtı
şekil 2'de gösterilmektedir.
k p ( yeni) k p (eski) j
(7)
ki ( yeni) ki (eski) j
(8)
Bölüm 2’de (3) denklemi ile verilen sistemin, (5) ve (6)
denklemleri ile belirlenmiş olan PI kontrolör katsayıları tepe
gözlemleyicisi yöntemi değiştirilmiş ve elde edilen sistem
yanıtları Şekil 4'te gösterilmiştir.
1.4
1.2
1
Genlik
1.4
0.8
Tepe gözlemleyicili sistem yanıtı
İçsel model kontrol yanıtı
1.2
0.6
1
Genlik
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
Zaman (Sn.)
3.5
4
4.5
0.8
0.6
5
0.4
Şekil 2: Sistemin içsel model kontrol ile sistem yanıtı.
0.2
Şekil 2'den görüldüğü üzere içsel model kontrol yöntemi ile
sistem yanıtında %24'lük bir aşım ve çok az miktarda salınım
görülmektedir.
0
0
0.5
1
1.5
2
2.5
3
Zaman (Sn.)
3.5
4
4.5
5
Şekil 4: Sistemin tepe gözleyicili yanıtı.
3. Tepe Gözleyicisi Yöntemi
Görüldüğü gibi tepe gözleyicisi yöntemi ile sistem yanıtındaki
salınımlar engellenmektedir.
Tepe gözlemleyicisi yöntemi, ilk defa, önceden tasarlanmış
PID tipi bulanık bir kontrolörün başarımını artırmak amacıyla
kullanılmıştır [6]. Bu yöntemde, tasarlanmış bir kontrolör ile
elde edilen sistem yanıtı ilk aşım değerine kadar gözlenir. İlk
aşım değerine ulaşıldığında kontrolör katsayıları bu aşım
değerine bağlı bir ifade ile çarpılarak değiştirilir. Böylece tepe
değeri kullanılarak hataya bağlı bir düzeltme işlemi
4. Model Taban Öngörülü Tepe Gözleyicisi
Yöntemi
Bu yöntem ile amacımız, sistemin ilk tepe noktasına
ulaşmasını beklemeden müdahale ederek meydana gelecek
859
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
aşımı azaltmaktır. Bu amaçla, ilk olarak, önceden tasarlanmış
olan kontrolör parametreleri ile oluşacak olan sistem yanıtının
yapması beklenen aşım değeri ön belirlenir. Sistem yanıtı
Tepe gözlemleyicisi ile model taban öngörülü tepe
gözlemleyicisi yöntemlerine ilişkin sistem yanıtları
karşılaştırılmak üzere Şekil 7'de verilmektedir.
referans değeri geçtiği anda kontrolör parametreleri (1/ ön )
1.4
katsayısı ile çarpılır. Bu çarpma işlemi ile her iki kontrolör
parametresinin de büyütülmesi amaçlanmaktadır. Hatanın
negatif bölgede olması nedeniyle yüksek kontrolör
parametrelerinin aşım değerini azaltıcı etki yaratacağı açıktır.
Bu model taban öngörülü sistem yanıtına daha sonra tepe
gözleyicisi yöntemi uygulanır ve salınımlar azaltılır.
Bölüm 2’de (3) denklemi ile verilen sisteme (5) ve (6)
denklemleri ile belirlenmiş olan PI kontrolör katsayıları
uygulandığında sistem yanıtında 0.24'lük bir aşım
görülmektedir. Sistem yanıtının referans değeri aşma
noktasında kontrolör parametrelerinin (1/ ön = 1/0.24=4.16)
1.2
Genlik
1
Tepe gözlemleyicili sistem yanıtı
İçsel model kontrol sistem yanıtı
Model taban öngörülü sistem yanıtı
Model taban öngörülü ve
tepe gözlemleyicili sistem yanıtı
0.2
0
1.4
0
1
2
3
4
5
6
Zaman (Sn.)
0
1
2
3
Şekil 7: Tepe gözlemleyicisi ile model taban öngörülü tepe
gözlemleyicisi yöntemlerine ilişkin sistem yanıtları.
1.2
Şekil 7'den görüldüğü üzere önerilen yöntem ile sistem aşımı
azaltılmış, salınımlar neredeyse yok edilmiş ve yerleşme
zamanı önemli ölçüde kısaltılmıştır.
Önerilen yöntemin bozucuya karşı dayanıklılığı Şekil 8'de
gösterilmektedir. Sisteme 5. saniyede bozucu giriş olarak 0.1
saniye süreli birim darbe giriş işareti uygulanmıştır.
1
Genlik
0.6
0.4
ile çarpılması sonucunda elde edilen sistem yanıtı Şekil 5'te
gösterilmektedir.
0.8
0.6
0.4
İçsel model kontrol yanıtı
Model taban öngörülü sistem yanıtı
0.2
0
0.8
0
0.5
1
1.5
2
2.5
3
Zaman (Sn.)
3.5
4
4.5
1.2
5
1
0.8
Genlik
Şekil 5: Sistemin içsel model kontrol ve model taban öngörülü
yanıtları.
Şekil 5'te elde edilen sistem yanıtından görüldüğü üzere
sistemin aşımı azaltılmış fakat salınımı artırılmıştır. Meydana
gelen salınımı engellemek için sisteme tepe gözlemleyicisi
yöntemi uygulanır. Aşımı azaltılmış sistemin tepe
gözlemleyicili yanıtı ise Şekil 6'de gösterilmektedir.
0.6
0.4
Tepe gözlemleyicili sistem yanıtı
İçsel model kontrol sistem yanıtı
Model tabanöngörülü ve
tepe gözlemleyicili sistem yanıtı
0.2
0
1.4
0
1
2
3
4
5
6
Zaman (Sn.)
7
8
9
10
Şekil 8: Tepe gözlemleyicisi ile model taban öngörülü tepe
gözlemleyicisi yöntemlerinin bozucu karşı sistem yanıtları.
1.2
Genlik
1
Önerilen yöntemlerin sistemde oluşabilecek bozucu girişlerine
karşı da dayanıklı olduğu gözlemlenmiştir.
0.8
0.6
5. Sonuçlar
0.4
Model taban öngörülü sistem yantı
Model taban öngörülü ve
tepe gözleyicili sistem yanıtı
0.2
0
0
0.5
1
1.5
2
2.5
3
Zaman (Sn.)
3.5
4
4.5
Bu çalışmada, ilk olarak tepe gözlemleyicisi yöntemi klasik PI
kontrolöre uygulanmıştır. PI kontrolör katsayıları içsel model
kontrol yöntemi belirlenmiştir. Tepe gözleyicisi yöntemi
klasik PI yapısına uygulanarak kontrolör parametreleri
doğrudan aşım değeri ile çarpılmış ve sistem yanıtları
incelendiğinde salınımların azaltıldığı gözlemlenmiştir.
Ayrıca, geliştirilen model taban öngörülü tepe gözleyicisi
yöntemi ile sisteme referans değerine ulaşıldığında müdahale
5
Şekil 6: Model taban öngörülü ve tepe gözleyicili sistem
yanıtları.
860
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
edilerek ilk aşım değeri de azaltılmıştır. Geliştirilen
yöntemlerin başarımı ve bozucu girişlere karşı dayanıklılığı
yapılan benzetim çalışmaları ile gösterilmiştir.
Kaynakça
[1] Äström, K.J. and Hägglund, T., 1995: PID Controllers:
Theory, Design and Tuning, Instrument Society of
America, Research Triangle Park, North Carolina.
[2] O’Dwyer, A., 2000: A Summary of PI and PID
Controller Tuning Rules For Processes With Time Delay.
Part 2: PID Controller Tuning Rules. IFAC Digital
Control: Past, Present and Future od PID
Control,Teressa,Spain. 211-216.
[3] Mudi, R.K. and Dey, C., 2009: An Improved auto-tuning
scheme for PID controllers, ISA Tras, 306-409.
[4] Skogestad S.,2002: ''Simple analytic rules for model
reduction and PID controller tuning'' Journal Process
Control 13, 291-309
[5] Riveria, D.E., Morari, M. & Skogestad, S., ''Internal
model control. PID controller design'' Ind.En.Chem.Res.,
25 :252-265
[6] Qiao, W.Z., Mizumato M., 1996: ''PID type fuzzy
controller and parameters adaptive method,'' Fuzzy Sets
and Systems 78, 23-35.
[7] Mudi, R. K., & Pal, N. R. 1999: A robust self-tuning
scheme for PI- and PD-type fuzzy controllers. IEEE
Transactions on Fuzzy Systems, 7(1), 2–16.
[8] Güzelkaya M., Eksin İ., Yesil E., 2003: “ Self-tuning of
PID-type fuzzy logic controller coefficients via relative
rate observer”, Engineering Applications of Artificial
Intelligence, 227–236.
[9] Ahn, K. K., Truong, D. Q. , 2009: Online tuning fuzzy
PID controller using robust extended Kalman filter.
Journal of Process Control, 19, 1011-1023.
[10] Yesil E., Guzelkaya M., Eksin I., 2004: Self-tuning fuzzy
PID-type
load-frequency
controller.
Electrical
Conversion and Management. 45/3, 377-390.
861
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Manyetik Askı (MAGLEV) Sisteminin Kontrolünde PID Tabanlı Yöntemler
Emre Dincel, Uğur Yıldırım, Mehmet Turan Söylemez
Kontrol Mühendisliği Bölümü
İstanbul Teknik Üniversitesi, İstanbul
{dincele, yildirimu, soylemezm}@itu.edu.tr
gösterilebilir [12], [13]. Bazı kontrolü zor sistemlerde klasik
PID kontrolör yapısı ile istenilen performans ölçütlerinin
sağlanması zor olabilmektedir. Bu nedenle, sistemlerin
kontrolünde PID tabanlı birden fazla serbestlik derecesine
sahip kontrolör yapıları da kullanılabilmektedir.
Çalışmanın ikinci bölümünde üzerinde çalışılan sistem ve
problem kısaca anlatılmış, üçüncü bölümde de bu sisteme
ilişkin matematiksel model verilmiştir. Elde edilen sistem
modeli
belirlenen
bir
çalışma
noktası
civarında
doğrusallaştırılmış ve dördüncü bölümde, elde edilen doğrusal
yaklaşım kullanılarak sistem için uygun yapıda kontrolörlerin
tasarımı yapılmıştır. Beşinci bölümde ise tasarlanan
kontrolörler fiziksel sisteme uygulanmış ve sistem yanıtları
incelenmiştir. Elde edilen tüm sonuçlar altıncı ve son bölümde
karşılaştırılarak teorik ve pratik sonuçların birbirleri ile
uyumluluğu
yorumlanmış
ve
sistemin
kontrolünde
kullanılabilecek olan kontrolör yapıları konusunda yorumlar
yapılmıştır.
Özetçe
Bu çalışmada çeşitli doğrusal kontrol teknikleri kullanılarak
manyetik askı (MAGLEV) sisteminde konum kontrolü
yapılması amaçlanmıştır. Doğrusal olmayan bir karakteristiği
bulunan manyetik askı sisteminin kontrolü için öncelikle
Taylor seri açılımı yardımıyla doğrusal model elde edilmiş,
sonrasında hedeflenen performans ölçütlerini sağlayacak olan
kontrolörler bu doğrusal model üzerinden tasarlanmıştır.
Tasarımı yapılan kontrolörler (PID, PIV ve PI-PD tipi
kontrolörler) MAGLEV deney seti üzerinde test edilmiş ve
aşım, yerleşme zamanı gibi performans ölçütleri göz önünde
bulundurularak karşılaştırılmıştır. Elde edilen sonuçlardan
hareketle bu sistemin kontrolünde kullanılması mümkün olan
kontrolörlerin belirlenmesi amaçlanmıştır.
1. Giriş
Manyetik askı sistemi günümüzde oldukça geniş uygulama
alanı bulunan ve bu nedenle üzerinde durulması gereken
önemli bir problem halini almıştır. Manyetik askı sistemlerinin
manyetik yataklar [1], ulaşım araçları [2], [3], tele operasyon
sistemleri [4], yarı iletken levha taşımacılığı [5] gibi çeşitli
alanlarda uygulaması bulunmaktadır. Bu sistemlerin kontrolü
kontrol sistem tasarımında önemli bir yere sahip olan ve gerek
doğrusal olmayan bir yapıda olması gerekse bozucu ve gürültü
etkilerine duyarlı olmasından dolayı zor bir problemdir.
Literatürde bu tip sistemlerin kontrolü için önerilmiş
çeşitli yöntemler bulunmaktadır. Özellikle sistemin doğrusal
olmayan karakteristiğinden dolayı kayma kipli kontrol [6], [7],
geribesleme doğrusallaştırması [7], [8] gibi doğrusal olmayan
kontrol yöntemlerine ya da model tabanlı adaptif kontrol [9],
[10] gibi tekniklere başvurulduğu görülmüştür. Bu tip
yöntemler daha geniş bir aralıkta çalışma imkanı vermesine
karşın hem kontrolörlerin tasarımı hem de tasarlanan
kontrolörlerin uygulamaya geçirilmesi ve işletilmesi, doğrusal
kontrolörlerin tasarımına ve uygulanmasına göre daha zor
olmaktadır. Bunun yanında endüstride PLC’ler gibi
programlanabilir kontrolörler içerisinde bulunan hazır PID
blokları ile ya da yazılımı basit fonksiyon bloklar ile
gerçekleme yapılması tercih edilir. Özellikle sistemin çok
geniş bir aralıkta çalışmasının gerekmediği durumda basit
kontrolör yapıları hem tasarım hem de uygulama sırasında
kolaylık sağlayacaktır. Bu amaçla, bu çalışmada manyetik askı
sisteminin kontrolünde doğrusal kontrolör tasarımları ele
alınmıştır.
Teknolojik gelişmelerle birlikte kontrol kuramında
önemli gelişmeler kaydedilmiştir. Ancak günümüzde özellikle
endüstrideki süreçlerin büyük çoğunluğu hala PID kontrolörler
ile kontrol edilmektedir [11], [12]. Bunun önemli nedenleri
olarak kontrolörün parametrelerinin ayarlanmasının basit
olması, kolay uygulanabilmesi ve kabul edilebilir dayanıklılığı
2. Manyetik Askı Sistemi
Bu çalışmada kullanılan Quanser™ firmasına ait manyetik
askı deney düzeneği Şekil 1’de verilmiştir. Amaç, çelik
bilyenin manyetik alan yardımı ile yerçekimi kuvvetine karşı
istenilen konumda sabit tutulmasını ve ayrıca denge
noktasından ±1mm sapmalar için sistem yanıtının istenilen
performans ölçütlerini sağlamasıdır. Şekil 2’de sistemin
temsili gösterimi verilmiştir. Kontrol edilmek istenilen
mesafesi çelik bilyenin elektromıknatıstan uzaklığı olarak
tanımlanır ve bu sistemde 0-14 mm arasında değer alır.
Şekil 1: MAGLEV deney seti.
862
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
(5)
ifadesine ulaşılır.
Öncelikle sistemin transfer fonksiyonları yardımıyla
modelini elde edecek olursak, (1) ifadesinin Laplace
dönüşümünün alınması ile elektriksel alt sisteme ilişkin
transfer fonksiyonu,
(6)
olarak bulunur. (5) ifadesi doğrusal bir eşitlik olmadığından
öncelikle çalışma noktası civarında doğrusallaştırılması
gerekmektedir. Öncelikle sistem belirli bir
çalışma
noktasında dengede iken, bu çalışma noktasındaki bobin
akımı
(7) eşitliği kullanılarak aşağıdaki gibi bulunabilir.
(7)
(8)
Taylor seri açılımı ile (5) ifadesinin doğrusallaştırılması
sonucunda,
Şekil 2: MAGLEV sistemi temsili şema [14].
(9)
Yukarıda verilen şemaya göre sisteme ilişkin parametreler ve
değerleri Tablo 1’de verilmiştir. Sistemin modellenmesi
aşamasında bu parametreler kullanılmıştır.
elde edilir. Bu ifadede (8) ifadesi yerine konulur ve gerekli
sadeleştirmeler yapılırsa sonuç olarak,
Tablo 1: MAGLEV sistemi parametre listesi ve değerleri
Parametre
Değer
Birim
Lc
412,5
mH
Rc
10
Ω
Rs
1
Ω
(10)
doğrusal ifadesine ulaşılır. Buradan da mekanik alt sisteme
ilişkin transfer fonksiyonu, Laplace dönüşümü yardımıyla,
(11)
2
g
9,81
m/s
Km
6,5308 x 10-5
N.m2/A2
Mb
0,068
kg
xb0
7
mm
biçiminde bulunur. Bu durumda manyetik askı sisteminin açık
çevrim transfer fonksiyonu,
(12)
3. Sistemin Modellenmesi
olur. Sistemin durum uzayı modelinin oluşturulmasında ise
durum değişkenleri,
İlk olarak elektriksel alt sisteme ilişkin diferansiyel denklem
yazılırsa,
(13)
(1)
elde edilir. Yerçekimi kuvvetine ilişkin ifadenin,
olarak alınabilir. Bu durumda,
(2)
(14)
ve elektromanyetik çekme kuvvetine ilişkin ifadenin,
(15)
(3)
(16)
olduğu da göz önünde bulundurularak, Newton’un ikinci
hareket yasası, yerçekimi ve elektromanyetik çekme
kuvvetleri etkisi altında havada dengede duran bilyeye
uygulanırsa,
ifadelerine ulaşılır. Matris gösteriminde ise aşağıdaki durum
uzayı modeli elde edilmiş olur.
(4)
863
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
Şekil 3’ten akım çevriminin yaklaşık %10 aşım yaptığı ve
25ms süresinde yerleştiği görülüyor. Performans ölçütlerinin
tam olarak sağlanamamasının sebebinin PI kontrolörün baskın
bölgeye eklediği sıfır olduğu söylenebilir.
(17)
4.2. Konum Kontrolü İçin PID Tasarımı
Elektriksel alt sisteme ilişkin PI tasarımı yapıldıktan sonra
artık bu kısma ait olan transfer fonksiyonu yaklaşık olarak 1
alınabilir. Bu durumda (11) ifadesi ile verilmiş olan mekanik
alt sisteme ilişkin transfer fonksiyonundan yola çıkarak
kontrolör tasarımına devam edilebilir. Şekil 4 sistemin
kontrolünde kullanılacak olan klasik PID kontrol yapısını
göstermektedir.
4. Kontrol Sistemi Tasarımı
Bu bölümde, bir önceki bölümde elde edilen transfer
fonksiyonları yardımıyla öncelikle akım çevrimi için bir PI
kontrolör tasarlanacak ve ardından konum kontrolü için PID
tabanlı kontrolörler (PID, PIV, PI-PD) tasarlanacaktır.
Bununla birlikte kullanılacak olan tüm yapılarda, sistemi
hızlıca çalışma noktası civarına getirmek için ilave olarak bir
ileri besleme kazancı kullanılacaktır.
Kff
R
E
+
-
Kp+Ki/s+Kd.s
+
+
Ge(s) ≈ 1
Gm(s)
Y
Şekil 4: İleri beslemeli PID kontrol yapısı
4.1. Elektriksel Alt Sistem PI Kontrolör Tasarımı
Elektriksel alt sisteme ilişkin transfer fonksiyonu (6) ile
verilmiştir. Birinci mertebeden bir sistem olduğu için bu
sistemin kontrolünde PI kontrolör kullanımı yeterlidir. Sistem
parametreleri yerine konulduğunda transfer fonksiyonunun,
Daha önce de belirtildiği gibi sistemin denge noktası civarına
hızlı bir biçimde taşınması amacı ile ileri yol besleme yapısı
kullanılmıştır. İleri yol besleme kazancı aşağıdaki şekilde
hesaplanabilir.
(19)
olduğu görülebilir. PI kontrolör yapısı,
Şekil 4 ile verilen sistemde çıkış ve giriş arasındaki transfer
fonksiyonu yazılırsa,
(18)
biçiminde verilir. İç çevrimin yani
olabildiğince hızlı olması gerekliliği
bulundurulduğunda ve performans ölçütü
20ms yerleşme zamanı seçildiğinde, kutup
PI kontrolör katsayıları,
(20)
akım çevriminin
de göz önünde
olarak 0 aşım ve
atama yöntemi ile
elde edilir. Gm(s) ifadesi de yerine konulursa sonuç olarak
kapalı çevrim transfer fonksiyonu,
(21)
olarak bulunur. Sistem parametrelerinin yerine konulması
sonucu (21) ile verilen transfer fonksiyonu aşağıdaki gibi olur.
olarak elde edilir. Yapılan bu tasarımla birlikte kapalı çevrim
sistemin basamak yanıtına bakacak olursak Şekil 3’teki gibi
bir yanıt elde ederiz.
(22)
Step Response
1.4
Performans ölçütü olarak 0 aşım ve 0,5s yerleşme zamanı
seçildiğinde buna ilişkin karakteristik denklem (23)
ifadesindeki gibi olacaktır.
1.2
Amplitude
1
(23)
0.8
Kapalı çevrim sistem yanıtı parametresinin çeşitli değerleri
için incelenmiş ve kontrol işareti gibi sınırlayıcı etkiler de göz
önünde bulundurularak
alınması uygun görülmüştür.
Bu durumda,
0.6
0.4
0.2
0
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Time (seconds)
olarak PID kontrolör parametreleri hesaplanmıştır.
Şekil 3: PI kontrolör ile birlikte elektriksel alt sistemin yanıtı
864
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
4.3. Konum Kontrolü İçin PIV Tasarımı
4.4. Konum Kontrolü İçin PI-PD Tasarımı
Fiziksel açıdan bakıldığında konum kontrolü için PID yerine
PIV seçilmesi, girişteki ani referans değişimlerinin kontrol
işaretinde büyük genlikli tepeler oluşturmasını engellemeye
yardımcı olmaktır. Sistem doğrusal olmadığı için kontrol
işaretinde oluşabilecek olan bu tip tepeler sistemin denge
noktası civarından fazla sapmasına ve kararlılık açısından
problemlere neden olabilir. PIV kontrol yapısında ise türev
terimi çıkıştan bilgi alır ve çıkıştaki değişimler referans
değişimlerine göre daha yavaş kaldığı için fazla problem
oluşturmaz. Ayrıca PID kontrol yapısı sisteme iki adet sıfır
eklerken, PIV kontrol yapısında yalnızca 1 adet sıfır
eklenmektedir. Bu da bazı durumlarda istenilen performans
ölçütlerinin sağlanması açısından önemli olabilmektedir. Şekil
5 uygulanacak olan kontrol yapısını göstermektedir.
Tasarlanmış olan PID ve PIV tip kontrolörler ile birlikte
özellikle kontrolör sıfırlarının etkisinden dolayı sistem
istenilen performans ölçütlerini tam olarak sağlayamayabilir.
Bu bölümde son olarak kontrolör sıfırının etkisinin azaltılması
ve istenilen performans ölçütlerine daha yakın sonuçlar elde
edilmesi amacıyla daha önceden tasarlanmış olan PID
kontrolörden yola çıkarak bir PI-PD kontrolör tasarımı
yapılacaktır. Bu tasarımın avantajı, kontrolörün sisteme bir
adet sıfır eklemesi ve bu sıfırın konumunun da istenildiği gibi
değiştirilebilir olmasıdır. Böylelikle sıfırın konumu uygun
şekilde belirlenerek sistemin istenildiği gibi davranmasını
sağlamak mümkün olmaktadır. Uygulanacak olan PI-PD
yapısı Şekil 6 ile verilmiştir.
Kff
Kff
R
R
E
+
-
Kp + Ki/s
+
+
-
Ge(s) ≈ 1
Gm(s)
E
+
-
Y
Kpi + Ki/s
+
+
-
Ge(s) ≈ 1
Gm(s)
Y
Kd.s+Kpd
Kv.s
Şekil 6: PI-PD kontrol yapısı
Şekil 5: PIV kontrol yapısı
Şekil 5 ile verilen sistemde çıkış ve giriş arasındaki transfer
fonksiyonu yazılırsa,
Kontrolöre ilişkin
ve
parametreleri bölüm 4.2’de
tasarlanmış olan PID kontrolöre ilişkin katsayılara denktir.
ve
katsayıları arasında ise (27) ile verilen ilişki söz
konusudur.
(24)
(27)
Sonuç olarak bir parametre diğeri cinsinden elde edilebilmekte
ve sistemin kapalı çevrim transfer fonksiyonu tek bir
parametreye göre yazılabilmektedir. Bu parametrenin
değişimine göre sistem yanıtının incelenmesi sonucunda da
sistemin en uygun yanıtı verdiği parametre değeri
belirlenebilmektedir. Buna göre kapalı çevrim transfer
fonksiyonu
parametresine göre yazılmış ve parametrenin
değişimine göre sistem yanıtı incelendiğinde
için
en iyi yanıtlardan birine ulaşılmıştır. Bu durumda da kontrolör
parametreleri,
ve son olarak Gm(s) ifadesi yerine konulursa,
(25)
ifadesine ulaşılır. Değerler yerine konulursa PIV kontrolör ile
birlikte kapalı çevrim transfer fonksiyonu aşağıdaki halini alır.
(26)
Dikkat edilirse, kapalı çevrim karakteristik denklemi sistemin
klasik PID kontrolör ile kontrol edildiği durumdaki kapalı
çevrim karakteristik denklemi ile aynıdır. Ancak, yeni
durumda sisteme yalnızca bir adet sıfır eklenmektedir.
Performans ölçütü olarak bir öncekine benzer şekilde 0
aşım ve 0,5s yerleşme zamanı seçildiğinde, istenilen
karakteristik polinom (23) ifadesi ile aynı olacaktır. Bu
durumda da kapalı çevrim sistem yanıtı
parametresinin
çeşitli değerleri için incelendiğinde belli bir değerden sonra
sistem yanıtında çok fazla değişiklik olmadığı görülmüş ve bu
nedenle
alınmasına karar verilmiştir. Buna göre kutup
atama sonucunda kontrolör parametreleri,
olarak elde edilmiştir.
5. Uygulama Sonuçları
Bu bölümde tasarımı yapılan kontrolörler deney seti üzerinde
MATLAB yardımıyla denenmiş ve elde edilen sistem
yanıtlarından hareketle kontrolörler kıyaslanmıştır.
Uygulama sırasında sistemin denge noktası civarındaki
referans değişimlerine vermiş olduğu cevaplar incelenmiştir.
Şekil 7, Şekil 8 ve Şekil 9 sistemin sırasıyla PID, PIV ve PIPD kontrolörlere vermiş olduğu yanıtları göstermektedir.
olarak bulunur.
865
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
MAGLEV Sistem Yanıtı (PID Kontrolör)
MAGLEV Sistem Yanıtı 2 (PID Kontrolör)
9
14
12
Konum (mm)
Konum (mm)
8
7
10
8
6
6
5
10
11
12
13
14
15
16
Zaman (saniye)
17
18
19
4
10
20
Şekil 7: PID kontrolör ile birlikte sistem yanıtı (6-8 mm)
11
12
14
15
16
Zaman (saniye)
17
18
19
20
Şekil 10: PID kontrolör ile birlikte sistem yanıtı (5-9 mm)
MAGLEV Sistem Yanıtı (PIV Kontrolör)
MAGLEV Sistem Yanıtı 2 (PIV Kontrolör)
9
10
9
8
8
Konum (mm)
Konum (mm)
13
7
7
6
6
5
5
10
11
12
13
14
15
16
Zaman (saniye)
17
18
19
4
10
20
Şekil 8: PIV kontrolör ile birlikte sistem yanıtı (6-8 mm)
11
13
14
15
16
Zaman (saniye)
17
18
19
20
Şekil 11: PIV kontrolör ile birlikte sistem yanıtı (5-9 mm)
MAGLEV Sistem Yanıtı (PI-PD Kontrolör)
MAGLEV Sistem Yanıtı 2 (PI-PD Kontrolör)
9
10
9
Konum (mm)
8
Konum (mm)
12
7
6
8
7
6
5
5
10
11
12
13
14
15
16
Zaman (saniye)
17
18
19
20
4
10
Şekil 9: PI-PD kontrolör ile birlikte sistem yanıtı (6-8 mm)
11
12
13
14
15
16
Zaman (saniye)
17
18
19
20
Şekil 12: PI-PD kontrolör ile birlikte sistem yanıtı (5-9 mm)
Sistem yanıtlarından da görüldüğü üzere tasarlanan
kontrolörler ile birlikte sistem aşım yapmamakta ve PID
kontrolör için yaklaşık 0,75 saniye, PIV kontrolör için
yaklaşık 1,15 saniye ve PI-PD kontrolör için yaklaşık 1,5
saniyede yerleşmektedir.
Çalışma noktası civarından sapmanın artması ile birlikte
sistem performansının ne kadar değiştiği de bu çalışma
içerisinde ele alınmıştır. Bu amaçla 6-8 mm aralığında
çalıştırılan sistem 5-9 mm aralığında çalıştırılmış ve elde
edilen sistem yanıtları PID, PIV ve PI-PD için sırasıyla Şekil
10, Şekil 11 ve Şekil 12 ile verilmiştir.
Grafiklerden de açıkça görüldüğü üzere PIV ve PI-PD
kontrolörler için çalışma aralığı denge noktasından ±2mm
sapmaya
kadar
çıkarıldığında,
kontrolörlerin
performanslarında bir miktar düşme gözlenmiş olsa da sistem
kararlı kalmakta ve kabul edilebilir sistem cevapları
alınmaktadır. Bu nedenle PIV ve PI-PD kontrolörler bu
sistemin kontrolü için kullanılabilir. Ancak PID kontrolör
kullanıldığı durumda sistem cevabına bakılırsa, sistemin
kararlı kaldığı ancak her an kararsızlığa gidebilecek bir
görüntü çizdiği görülür. Özellikle PID kontrolör kullanılması
halinde referans işaretindeki değişim miktarının artmasının
sonucu olarak kontrol işaretinin müsaade edilen sınırları
geçtiği ve buna bağlı olarak sistemin daha önceden
öngörülmeyen bir şekilde osilasyonlu bir çıkış verdiği
gözlenmiştir. Her ne kadar çalışma noktası civarında PID
kontrolör daha hızlı bir yanıt vermiş olsa da çalışma aralığının
bir miktar arttırılması sonucunda kararsızlık problemi ortaya
866
Otomatik Kontrol Ulusal Toplantısı, TOK2013, 26-28 Eylül 2013, Malatya
çıkarabildiğinden PID kontrolörün kullanılması bu sistem için
uygun görünmemektedir.
[9]
6. Sonuçlar
Bu çalışmada doğrusal olmayan bir karakteristiğe sahip olan
manyetik askı sisteminin PID tabanlı kontrolörler ile kontrol
edilmesi amaçlanmıştır. Hem kontrolörün tasarım aşamasının
hem de pratik gerçekleme aşamasının kolay olması, endüstride
sıklıkla tercih edilmesi gibi sebepler PID tabanlı kontrolörlerin
ele alınmasında önemli rol oynamıştır. Sistemin kontrolü için
PID, PIV ve PI-PD kontrolörler tasarlanmış ve tasarlanan
kontrolörlerin performansları pratik gerçekleme sonucu
incelenmiştir. Teorik hesaplamalar ile pratikte elde edilen
sonuçlar arasında bazı farkların olduğu görülmüştür. Bunların
sebepleri olarak da doğrusallaştırmadan kaynaklanan hatalar,
elektriksel alt sistemin ihmal edilmesi, kontrol işareti
sınırlandırmaları, ölçme elemanından kaynaklanan problemler
gibi hatalar düşünülmüştür. Ayrıca sistemin denge noktası
civarından fazla sapması durumunda doğacak sonuçlar da
incelenmiş ve PID kontrolörün dayanıklı bir yapı ortaya
koymadığı görülmüştür. Sonuç olarak, PIV ya da PI-PD
kontrolörlerin benzer yanıtlar verdiğini ve manyetik askı
sistemin kontrolünde kullanılmalarının daha uygun olduğu
sonucuna ulaşılmıştır.
[10]
[11]
[12]
[13]
[14]
7. Kaynakça
[1] S.C. Mukhopadhyay, J. Donaldson, G. Sengupta, S.
Yamada, C. Chakraborty, D. Kacprzak, “Fabrication of a
repulsive-type magnetic bearing using a novel
arrangement of permanent magnets for vertical-rotor
suspension”, IEEE Transaction on Magnetics, Cilt: 39,
No: 5, s: 3220-3222, 2003.
[2] M. Proise, “System concept definition of the Grumman
superconducting electromagnetic suspension (EMS)
Maglev design”, Maglev’93 Conf., Argonne Nat. Lab.,
IL, May 19–21, 1993.
[3] B.V. Jayawant, P.K. Sinha, and D.G. Aylwin, “Feedback
control system for D.C. electromagnets in passengercarrying vehicles”, Int. J. Control, Cilt: 24, No: 5, s: 627–
639, 1976.
[4] B. Unger, R. Hollis, “Design and operation of a forcereflecting magnetic levitation coarse-fine teleoperation
system”, Proceedings of the 2004 IEEE International
Conference on Robotics and Automation, Cilt: 4, s: 41474152, 2004.
[5] E. Shameli, “Design, Implementation and Control of a
Magnetic Levitation Device”, Doktora Tezi, University of
Waterloo, Mechanical Engineering, Waterloo, Ontario,
Canada, 2008.
[6] D. Cho, Y. Kato, D. Spilman, “Sliding Mode and
Classical Control Magnetic Levitation System,” IEEE
Control Systems Magazine February 1993, No: 1, s: 4248, 1993.
[7] S.B. Akat, M.Ö. Efe, “Bir Manyetik Askı Sisteminin
Kontrolünde Dört Yöntemin Karşılaştırılması”, Otomatik
Kontrol Ulusal Toplantısı, TOK’07, İstanbul, 2007.
[8] D.L. Trumper, J. Sanders, T. Nguyen, M. Queen,
“Experimental results in nonlinear compensation of a
one-degree-of-freedom magnetic suspension,” in Proc.
NASA Int. Symp. Magn. Suspension Techonol., NASA
867
Langley Research Center, Hampton, VA, Aug. 19–23,
1991.
E. Shameli, M.B. Khamesee, J.P. Huissoon, "Application
of a model reference adaptive feedback linearization
controller to a magnetic telemanipulation system," IEEE
International Conference on Mechatronics and
Automation, ICMA 2008, s: 219,223, 5-8 Aug. 2008.
L.H.S. Torres, L. Schnitman, C.A.V.V. Junior, J.A.M.F.
Souza, "Feedback Linearization and Model Reference
Adaptive Control of a Magnetic Levitation System",
Studies in Informatics and Control, ISSN 1220-1766,
Cilt: 21 (1), s: 67-74, 2012.
K.J. Aström, T. Hagglund, Advanced Pid Control, ISAThe Instrumentation, Systems, and Automation Society,
2006.
K.J. Aström, T. Hagglund, Pid Controllers, International
Society for Measurement and Control, 1995.
K. J. Åström, and T. Hägglund, PID controllers: Theory,
design and tuning. Research Triangle Park, NC:
Instrument Society of America.
Magnetic Levitation Plant Manual, Quanser Inc.
Markham, Ontario, Canada.