MARMARA ÜNİVERSİTESİ
TEKNOLOJİ FAKÜLTESİ
Tekerlek Dinamiğinin
İncelenmesi
HAZIRLAYAN:
Yrd. Doç. Dr. Abdullah DEMİR
TEMEL KAVRAMLAR
Dinamik: Hareketin veya
hareketteki değişmelerin sebeplerini
araştırarak, kuvvet ile hareket
arasındaki ilişkiyi inceleyen
mekaniğin bir bölümüne dinamik
denir.
Hareket: Bir cismin herhangi bir
referans noktasına göre zamanla yer
değiştirmesi olayına denir.
Konum: Bir hareketlinin t saniye
sonra sabit bir noktaya göre
belirtilen vektörel uzaklığıdır.
Yer Değiştirme = Son konum - İlk
konum
TEMEL KAVRAMLAR
Hız: Bir cismin birim zamandaki yer
değiştirmesine hız denir. Hız v harfi
ile gösterilir. Birim olarak genelde
metre veya kilometre kullanılır. Hız
bir vektörel büyüklüktür. Örneğin,
bir araç bir dakikada yüz metre yol
alıyorsa bu aracın dakikadaki hızı
100 m’dir deriz. Hızın tanımında
verilen yer değiştirme kavramı
cismin bulunduğu noktadan başka
bir noktaya hareket etmesidir.
hızın formülü:
v = x/t’dir. Burada:
v= Hız
x= Yol
t= Zaman’dır.
1 mil/h = 1,60934 km/h / 1 km/h = 0,62137 mil/h
1 m/dak = 3,28 ft/dak
TEMEL KAVRAMLAR
İvme: İvme, hızın değişim oranıdır. İvme
bir kuvvetle ortaya çıkar. Örneğin,
bisikletinizin
tekerlek
kuvveti
yol
üzerinde bisikletinizin ivmelenmesine yol
açar. Bir cisim ivmelendiğinde hızı artar.
Kırmızı trafik ışığında bekleyen bir
otomobilin hızı yoktur ve durmaktadır.
Işık yeşil yanınca, sürücü gaz pedalına
basar ve otomobil ileri doğru hareket eder.
Hızın
zamanla
artmasının
aksine
eksilmesi de söz konusu olabilir. Örneğin,
normal hızla giden bir otomobilin kırmızı
ışığı görünce durması sırasında yaptığı
hareket, hızın zamanla azalmasına bir
örnek teşkil eder. Bu durumda, otomobil
frenine basmak suretiyle hız zamanla
yavaşlatılır ve ivme aksi yönde ortaya
çıkar. Azalan ivme, otomobilin zaman
içinde yavaşlayıp, durmasını sağlar.
TEMEL KAVRAMLAR
Düzgün Hızlanan Doğrusal Hareket
Bir cismin hızı eşit zamanlarda eşit miktarda artarsa yapmış olduğu
harekete düzgün hızlanan hareket denir. Hız artısı düzgün olduğu için
ivme sabittir. Düzgün hızlanan doğrusal harekette hareketli hızını düzenli
ve sürekli olarak arttırır. Duran bir aracın harekete baslarken hızlanması
veya hareket halindeyken gaza basarak hızını arttırması bu harekete
örnektir. Cismin ilk hızı V0 ise hız her saniye sonunda ivme (a) kadar
artacağından, t saniye sonra cismin hızı;
TEMEL KAVRAMLAR
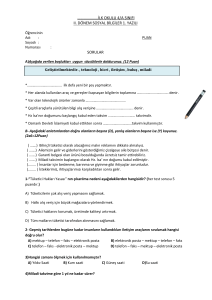
Sekil: v-t, a-t ve xt grafikleri
TEMEL KAVRAMLAR
Newton’un Hareket Kanunları: Newton
1687 yılında hareket ile ilgili 3 temel
kanun belirledi.
Bu kanunlar:
Eylemsizlik kanunu
Dinamiğin temel ilkesi (F=m.a)
Etki-tepki kanunu dur.
Newton bu kanunları belirlerken
Galileo'nun fikirlerinden yararlandı.
Isaac Newton (1642-1727)
TEKERLEK HAREKET DENKLEMLERİ
Hareket halindeki bir tekerleğe ve
daha sonra da hareket halindeki
iki akslı bir taşıta etki eden kuvvet
ve
momentlerin
incelenmesi
uygun olacaktır. Bu kuvvet ve
momentlerin
dengelerinden
yararlanılarak hareket denklemleri
çıkarılacak, ayrıca tekerlek ile
zemin arasındaki kuvvet bağlantısı
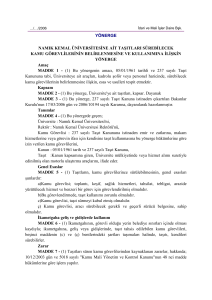
incelenecektir. Şekil 1.1'de belirli
bir tahrik momenti altında iken
yuvarlanan bir tekerleği etkileyen
kuvvetler görülmektedir. Bunlar:
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TEKERLEK HAREKET DENKLEMLERİ
X
Z
MT
Fx
Fz
mT
JT
v
r
e
: taşıtın tekerleğe tepki kuvveti
: taşıtın ağırlığından tekerleğe düşen kuvvet
: tekerlek momenti
: tekerlek çevre kuvveti
: yolun tepki kuvveti = tekerlek yükü
: tekerlek kütlesi
: tekerlek ataleti
: taşıt hızı
: tekerlek statik yarıçapı
: tekerlek yükünün etkime noktasının eksenden kaçıklığı
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TEKERLEK HAREKET DENKLEMLERİ
Tekerleğin
hareket
yönündeki
doğrusal deplasmanı x ile, tekerlek
aksının düşey yöndeki deplasmanı ise
z gösterilmektedir. Zamana göre
alınan türevler değişkenin üzerine
konulan
nokta
ile
ifade
edilmektedir. x..; zamana göre ikinci
türev olup tekerleğin hareketi
doğrultusundaki
ivmesini
ifade
etmektedir. Aynı şekilde z.. ise aksın
düşey yöndeki hareketinin ivmesidir.
Her iki ivmenin, tekerlek kütlesi ile
birlikte
yol
açtıkları
atalet
kuvvetlerinin dengeleri
aşağıdaki
gibi ifade edilebilir.
Dönen tekerleğin atalet momenti ise
tekerleğin dönme açısal ivmesi ϕ..
olmak üzere aşağıdaki gibi ifade
edilebilir.
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TEKERLEK HAREKET DENKLEMLERİ
Yuvarlanma sırasında temas yüzeyi
dinamik basınç dağılımı
Yuvarlanma sırasında temas yüzeyi
dinamik basınç dağılımı
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
Yuvarlanma Direnci
Güç, sınırlayıcı kuvvetlerin üstesinden gelmek için sarfedilmek zorundadır.
Bunlardan bir tanesi de yuvarlanma direncidir. Yuvarlanma direnci; aracın
yüklü ağırlığına, yol yüzeyinin türüne ve lastik üretiminde kullanılan malzemelere,
yapı ve dizaynlara bağlı olarak değişir.
Yuvarlanma direncini oluşturan ikincil nedenler olarak; tekerlek yatağı, yağ keçesi
sürtünmesi ve transmisyon sistemindeki yağın çalkalanmasıdır.
Yuvarlanma direnci, tekerlek yuvarlanırken zeminle temas bölgesinin ezilmesi, bu
bölgeye giren lastik elemanlarının sıkışması, çıkan elemanların uzaması, bu olayın
zeminde asimetrik bir basınç doğurması ve sıkışıp uzama olayının kayıplı
olmasından kaynaklanmaktadır.
Yuvarlanma direnç katsayısı ƒR ile gösterilir ve ƒR = e/r olarak formüle edilir.
Burada;
e= Tekerlek yükünün etkime noktasının eksenden kaçıklığı,
r= Tekerlek statik yarıçapı olarak tanımlanır.
Yuvarlanma direnci, yuvarlanma direnç katsayısı ile tekerlek yükünün çarpılması
neticesinde bulunur. FR=ƒ
ƒRFz şeklinde formüle edilir[6:s.2].
Abdullah Demir, Masteri Tezi
FR = fR (FzÖ + FzA)
Yuvarlanma Direnci
Composed primarily of
1. Resistance from tire deformation
(∼90%)
2. Tire penetration and surface
compression (∼ 4%)
3. Tire slippage and air circulation around
wheel (∼ 6%)
4. Wide range of factors affect total rolling
resistance
Yuvarlanma Direnci
A.G. GÖKTAN, A. GÜNEY, M. EREKE, TA IT FRENLER
Kaynak: Modern Electric, Hybrid Electric and Fuel Cell Vehicles - Fundamentals, Theory and Design 2nd by Ehsani, 2010
Yuvarlanma Direnci
The rolling resistance of tires on hard
surfaces is primarily caused by
hysteresis in the tire materials. Figure
shows a tire at standstill, on which a
force, P, is acting at its center. The
pressure in the contact area between
the tire and ground is distributed
symmetrically to the central line and
the resultant reaction force, Pz, is
aligned to P. The deformation, z,
versus the load, P, in the loading and
unloading process is shown in Figure.
Pressure distribution in contact area.
Kaynak: Modern Electric, Hybrid Electric and Fuel Cell Vehicles - Fundamentals, Theory and Design 2nd by Ehsani, 2010
To keep the wheel rolling, a force, F, acting on the center of the wheel is
required to balance this rolling resistant moment. This force is
expressed as.
Yuvarlanma
Direnci
where rd is the effective
radius of the tire and fr =
a/rd is called the rolling
resistance coefficient. In
this way, the rolling resistant
moment can be equivalently
replaced by a horizontal
force acting on the wheel
center in the opposite
movement direction of the
wheel. This equivalent force
is called rolling resistance
with a magnitude of
FIGURE 2.4 Tire deflection and rolling resistance on a (a) hard and (b) soft
road surface.
Kaynak: Modern Electric, Hybrid Electric and Fuel Cell Vehicles - Fundamentals, Theory and Design 2nd by Ehsani, 2010
KUVET BAĞLANTI KATSAYISI
Kuvvet bağlantısı ve kayma
Tekerleğe bir MT momenti etki ediyorsa,
ivmesiz harekette denklemine göre
Fx = MT/r - FR
bulunur. MT/r oranına tekerlek çeki
kuvveti denir.
Tekerlek çevre kuvveti = Tekerlek çeki
kuvveti - Yuvarlanma direnci
Ancak burada bulunan çevre kuvveti sınırsız
olmayıp, zeminle lastik tekerlek arasındaki
kuvvet bağlantısına bağlıdır.
μ , kuvvet bağlantı katsayısını gösterirsek,
Fx = μ Fz
çevre kuvvetinin alabileceği değerler
bulunur.
Kuvvet bağlantı katsayısı lastiğin dönerken
zemin üzerinde kaymasına bağlıdır.
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
KAYMA
Kuvvet bağlantı katsayısı lastiğin dönerken
zemin üzerinde kaymasına bağlıdır.
Kaymasız yuvarlanan bir tekerlek bir
dönüşünde yuvarlanma çevresi adı verilen
U mesafesini kat eder.
U=2πR
den hesaplanan R'ye dinamik tekerlek
yarıçapı denir.
Tekerleğin yuvarlanarak eriştiği çevresel
hız
, taşıt hızı v den farklı ise kayma
olmaktadır. Bu iki hızın farkının büyük olan
hıza oranına kayma denir. Kayma hep
pozitif olsun diye frende ve tahrikte iki farklı
ifade kullanılır. Kayma 0 ile 1 arasında
değerler alır.
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
Kuvvet bağlantı katsayısı ile
kaymanın ilişkisi
Kayma ile kuvvet bağlantı katsayısı arasındaki ilişki Şekilde gösterilmiştir.
Kuvvet bağlantı katsayısının en büyük değerine μh tutunma katsayısı,
kaymanın 1 olduğu değerine ise μg kayma katsayısı denir.
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
Brake slip
λ = (υF – υR)/υF · 100 %
Wheel speed
υR = r · ω
Braking force
FB = μHF · G
Lateral force
FS = μS · G
μHF Coefficient of friction,
μS Lateral-force coefficient.
There is a more or less sharp drop
in the coefficient of friction μHF,
depending upon the shape of the
slip curve. The resulting excess
torque causes the wheel to lockup very quickly (when braking
without ABS); this is expressed as
a sharp increase in wheel
deceleration
Adhesion/slip curve
The curve shape differs greatly as a function of road surface
and tire condition.
Kuvvet bağlantı katsayısı ile kaymanın ilişkisi
Kayma ile kuvvet bağlantı katsayısı arasındaki ilişki Şekilde gösterilmiştir.
Kuvvet bağlantı katsayısının en büyük değerine μh tutunma katsayısı,
kaymanın 1 olduğu değerine ise μg kayma katsayısı denir.
Kuvvet bağlantı katsayısı ile
kaymanın ilişkisi
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TAŞIT HAREKET DENKLEMLERİ
Şekilde eğimli bir yolda, yukarı doğru hareket halindeki bir taşıta etki eden
kuvvetler ve taşıtın hareket denklemeleri açısından önemli olan boyutları
görülmektedir. Aşağıda bu kuvvetlerin arasındaki bağıntılar ve taşıta etki
eden hareket dirençleri kısaca ele alınacaktır.
Yine taşıtın hareket doğrultusundaki
deplasmanı x olmak üzere x ekseni
boyunca kuvvetlerin dengesini yazarsak:
tekerlek dönme hareketi denklemini
kullanarak ön ve arka tekerlekler için Fx
tekerlek çevre kuvvetlerini yerine
koyalım:
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TAŞIT HAREKET DENKLEMLERİ
X
Z
MT
Fx
Fz
mT
JT
v
r
e
kaçıklığı
: taşıtın tekerleğe tepki kuvveti
: taşıtın ağırlığından tekerleğe düşen kuvvet
: tekerlek momenti
: tekerlek çevre kuvveti
: yolun tepki kuvveti = tekerlek yükü
: tekerlek kütlesi
: tekerlek ataleti
: taşıt hızı
: tekerlek statik yarıçapı
: tekerlek yükünün etkime noktasının eksenden
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TAŞIT ETKİYEN KUVVETLER
Boyuna araç dinamiği modelinde, tekerlek
kuvvetleri ve araca etkiyen, yokuş, rüzgâr,
yuvarlanma direnci gibi dirençlerin
bilinmesi durumunda aracın hız ve
konumu Newton’un ikinci yasası
yardımı ile elde edilebilmektedir. Araç
üzerine etkiyen dış kuvvetler aşağıdaki
şekilde sıralanabilir.
Rüzgâr direnci
Yokuş direnci
Yuvarlanma direnci
İvmelenme direnci
Fren kuvvetleri
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT ETKİYEN KUVVETLER
Aerodinamik Direnç (Rüzgâr Direnci)
Rüzgâr direnci aşağıdaki denkleme göre hesaplanabilmektedir.
Burada aracın yan profilinden etkiyen rüzgâr kuvvetleri ihmal
edilmiş olup, rüzgârın sadece seyahat doğrultusunda estiği
varsayımı yapılmaktadır. Buna göre rüzgâr direnci;
formülü ile hesaplanmaktadır. Burada;
Fa
: Rüzgâr direnci [N]
A
: Araç ön cephe alanı [m^2]
ρ
: Hava yoğunluğu [kg/m^3]
Cd
: Aerodinamik direnç katsayısı
Vref
: Rüzgâr bağıl hızı [m/s] büyüklerini temsil etmektedir.
A : kesit alanı.
Otomobillerde 1.85
m2 ; kamyonlarda 8
m2 alınabilir
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT ETKİYEN KUVVETLER
Yokuş Direnci
Yokuş direnci basit trigonometrik hesaplar ile elde
edilebilmektedir. Burada dikkat edilmesi gerek nokta, araç ağırlığı
ve tekerlek yüklerinin eğim ile birlikte değişmesidir.
Yokuş direnci;
formülü yardımı ile hesaplanabilmektedir.
Burada;
Fi : Yokuş direnci [N]
W : Arac ağırlığı [N]
Θ ise yokuş eğimini temsil etmektedir.
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT ETKİYEN KUVVETLER
Yuvarlanma Direnci
Tekerleğin elastik yapısı nedeniyle, tekerlek temas
merkezinin önünden yuvarlanmaya karşı tekerlek
yuvarlanma dirençleri oluşmaktadır. Yuvarlanma
direnci, kurulan modelde SAE J2452 standardında
belirtilen yöntem ve katsayılar yardımı ile
hesaplanmaktadır. Buna göre;
P
: Tekerlek basıncı [kPa]
W
: Tekerlekler üzerindeki yük [N]
V
: Araç hızını [m/s] temsil etmektedir.
a, b ve c deneysel yöntemler ile elde edilmiş katsayılardır.
Tekerlekler aracılığı ile araca etkiyen yuvarlanma direnci
aynı zamanda tekerlek modelinde de hesaplanmaktadır.
Kolaylık olması açıcısından yuvarlanma direnci hesabında
SAE J2452’de belirtilen yöntem kullanılmıştır.
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT HAREKET DENKLEMLERİ
Mavi kareye alınan ifade 1/m ile çarpılırsa)
olarak yazılabilir. λ değeri otomobillerde 1. viteste 1.45; 2. viteste 1.15; 3. viteste 1.08; 4.
viteste 1.05; 5. viteste 1.03 civarında alınabilir.
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları, A.G.Göktan 2001/2002
TAŞIT ETKİYEN KUVVETLER
Dönen Kütle Faktörü
Araca kütlesinden dolayı etkiyen ivmelenme direncinden başka, araçta dönen
aktarma organları da ivmelenme direnci oluşturmaktadır. Bu dönen kütlelerin
ataleti her bir vites çevrim oranı için farklı büyüklükte olarak toplam atalet
direncine etki etmektedir. Dönen kütle faktörünün hesabı için, dönen organların
ataleti kinetik enerji denklemleri yardımı ile aşağıda verildiği şekilde tekerleklere
indirgenmektedir.
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT ETKİYEN KUVVETLER
Dönen Kütle Faktörü
Je : Motor atalet momenti
Jp : Diferansiyel şaftı atalet momenti
Jt : Toplam tekerlek atalet momenti
Jd : Diferansiyel atalet momenti
ig : Dişli kutusu çevrim oranı
id : Diferansiyel çevrim oranı
ω : Açısal hız
λ : Dönen kütle faktörü
Yandaki denkleme göre, her bir vites
için elde edilen dönen kütle
faktörleri Tablo 1’de verilmiştir.
Tablo 1 : Viteslere göre değişen dönen kütle faktörleri
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT ETKİYEN KUVVETLER
Boyuna Hareket Denklemi
Araca etkiyen kuvvetlerin toplamından hareketle Newton’un
ikinci yasasında kullanılan denklemler yardımı ile aracın
ivme ve hız profili hesaplanılabilmektedir.
Bir karayolu taşıtında, rüzgâr direnci, yuvarlanma direnci
gibi yol yüklerine karşılık, tekerleklere güç aktarma organları
tarafından aktarılan pozitif çekiş kuvvetleri bulunmaktadır.
Dirençler yenildiği takdirde, arta kalan çekiş kuvvetleri
aracın ivmelenmesi için kullanılmaktadır. Yukarıda verilen
eşitlikte, aracın kütlesi, dönen güç aktarma organları
nedeniyle ortaya çıkan dönen kütle faktörü ile
çarpılmaktadır [9, 11].
Frenleme durumunda frenleme ivmesi bx aşağıdaki şekilde
hesaplanmaktadır.
Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü, Doktora Tezi, Mayıs 2008
TAŞIT HAREKET DENKLEMLERİ
Aktarma organları
Makine Mühendisliği
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları,Yrd.
A.G.Göktan
2001/2002
Doç. Dr. Abdullah
DEM R
TAŞIT HAREKET DENKLEMLERİ
Aktarma organları
Makine Mühendisliği
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları,
2001/2002
Yrd. Doç.A.G.Göktan
Dr. Abdullah DEM
R
TAŞIT HAREKET DENKLEMLERİ
Aktarma organları
Makine Mühendisliği
Taşıt Frenleri, A.G.Göktan ve Arkadaşları, 1995 ve Taşıt Konstrüksiyonu Ders Notları,
2001/2002
Yrd. Doç.A.G.Göktan
Dr. Abdullah DEM
R
The typical energy flow of conventional
internal combustion engine vehicle
Siang Fui Tie, Chee Wei Tan, A review of energy sources and energy management system in electric vehicles, Renewable and Sustainable Energy Reviews 20 (2013) 82–102
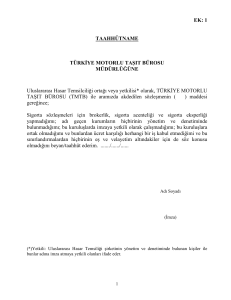
OKUMA PARÇASI: İçten yanmalı motorlarda üretilen enerjinin büyük bir bölümü egzoz gazları ve
motor gövdesi aracılığıyla ısı olarak dışarı atılmaktadır. Orta boyutlu bir aracın şehir içi ve dışındaki
seyirlerde harcadığı yakıt oranları baz alınarak değerlendirme yapıldığında; İçten yanmalı motorlarda
dönüştürülen kimyasal enerjinin şehir içi çevrimde %62,4’ü ısı olarak dışarı atılmaktadır. Kullanılabilir
enerjinin %17,2’si motor boşta olduğu durumda hareket enerjisine dönüştürülmeden harcanmakta,
%5,8’i fren enerjisi, %5,6’sı ise mekanik kayıp olarak tüketilmektedir.
Dizel ve benzinli araçların tam yük verimleri sırasıyla yaklaşık %40 ve %37 civarındadır. Kısmi yüklerde
bir şehir içi çevriminde bu oranlar dizel araçlar için ortalama %20, benzinli araçlar için %17 oranlarında
gerçekleşmektedir.
Orta Boyutlu Bir Aracın Şehir İçi ve Otoban Çevriminde Harcadığı Enerji Oranları (Parantez
içerisindeki değerler otoyol çevrimindeki oranlarını göstermektedir.)
Kaynak: Ali Boyalı, Hibrid Elektrikli Yol Ta ıtlarının Modellenmesi ve Kontrolü, stanbul Teknik Üniversitesi Fen Bilimleri Enstitüsü, Doktora Tezi, 2008.
2008.