II. DERS 3 te E‡R LER ve VEKTÖR ALANLARI
advertisement

Bölüm 1
II. DERS
R3 te ERLER ve VEKTÖR
ALANLARI
Bu kesimde R3 e§ri kavram tanmlanacak ve geometrik özellikleri tart³lacaktr.
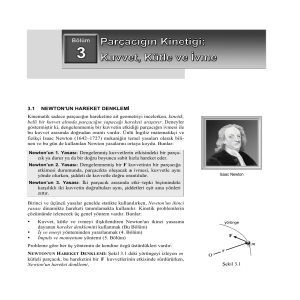
1.1 DFERENSYELLENEBLR ER VE
PARAMETRK TEMSL
I notasyonu ile R nin a < t < b, a < t, t < b ³eklindeki aralklar kastedilecektir.
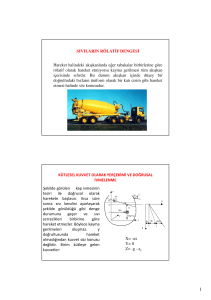
Tanm 1.1.1 α : I → R3 diferensiyellenebilir fonksiyonuna R3 te bir e§ri
denir. α, C k snfndan ise α ya C k snfndan e§ri veya ksaca C k e§ri denir.
α nn tanml oldu§u I aral§ [a, b] ³eklinde bir kapal aralk ise, α nn
diferensiyellenebilirli§inden kastedilen ³udur:
∃c > 0 reel says ve α : (a−c, b+c) → R3 diferensiyellenebilir fonksiyonu,
α(x) = α(x), ∀x ∈ [a, b]
olacak ³ekilde var ise α ya diferensiyellenebilir e§ri denir.
1
2
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
z
a(t)=a(t)
a(b)
y
a
a(a)
x
a-c
a
b
b+c
I
ekil 1.1:
α(a) ve α(b) ye e§rinin ba³langç ve biti³ noktalar denir. I = [a, b] ise uç
noktalar e§riye aittir.
t ∈ I için, α(t) = (α1 (t), α2 (t), α3 (t)) olup, αi ler α e§risinin koordinat
temsili olan fonksiyonlardr.
(α1 (t), α2 (t), α3 (t)) ifadesine e§rinin "parametrik temsili" denir.
t ∈ I ⊆ R parametresi zaman parametresi gibi dü³ünülürse α(t) e§risi
hareketli bir noktann R3 deki yörüngesi olarak ele alnabilir.
Örnek 1.1.2 α e§risi, koordinat fonksiyonlar t ∈ I ya göre lineer olan e§riyi
yazalm. Bu e§ri;
−
α(t) = u + t→
v
→
→
→
= (u1 + t−
v1 , u2 + t−
v 2 , u 3 + t−
v3 )
→
ile verilir. α(t), u dan geçen ve do§rultman vektörü −
v olan do§ru olur.
Örnek 1.1.3 α(t) = (r cos t, r sin t, 0), xy−düzleminde r > 0 yarçapl çember e§risi
Örnek 1.1.4 α(t) = (r cos t, r sin t, bt), r yarçapl dik silindir üzerine kurulu, b adml helis e§risi
Örnek 1.1.5 α(t) = (t, t2 , 0) (0 < t < 1) parabol e§risi parças
Örnek 1.1.6 α(t) = (t, t2 , t3 ) (−∞ < t < ∞) kübik e§ri
1.1 DFERENSYELLENEBLR ER VE PARAMETRK TEMSL 3
1.1.1
E§riler Hakknda Baz Sorular ve Cevaplar
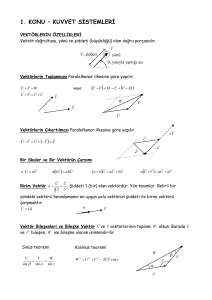
E§ri tanm ve örnekleri bir önceki kesimde verilmi³ti. imdi baz uyarlar yapaca§z. α : I → R3 , α(t) = (α1 (t), α2 (t), α3 (t)) olarak ifade etmeye e§rinin
parametrik ifadesi denir. αi (t) koordinat fonksiyonlar arasnda t yi yok etmek mümkün ise e§riyi bir denklemle ifade etmek olasdr. R2 de bu tek
denklemle, R3 te ise iki denklemle olabilir.
1) R2 deki bir e§ri bir tek denklemle ifade edilebilir:
α : I → R2 ,
t → α(t) = (α1 (t), α2 (t))
¾
x = α1 (t)
y = α2 (t)
sisteminin çözümü tek parametreye ba§ldr. t yok edilirse bir F (x, y) = 0
denklemi e§riyi ifade edecek ³ekilde elde edilir. Böylece F (x, y) = 0, bu e§riyi
tek türlü belirler.
Örnek 1.1.7
α(t) = (cos t, sin t)
α1 (t) = cos t
α2 (t) = sin t
¾
x = cos t
t yok edilirse
y = sin t
e§rinin deklemi olarak
x2 + y 2 = cos2 t + sin2 t = 1
x2 + y 2 − 1 = 0
F (x, y) = 0
elde edilir.
2) R3 de tek denklem bir yüzey belirtir. Bir e§ri böyle iki denklemle
verilir.
Mesela, x2 = x21 ve x1 x3 = x22 yüzeylerinin arakesit e§risi (t, t2 , t3 ) = α(t)
dir.
4
II. DERS
R3 te ERLER ve VEKTÖR ALANLARI
R3 te bir F (x, y, z) = 0 e³itli§i bir yüzey belirtir. R3 te bir
α : I → R3 ,
t → α(t) = (α1 (t), α2 (t), α3 (t))
e§risi parametrik ifadesiyle verilsin.
x = α1 (t)
y = α2 (t)
z = α3 (t)
yazlsn. Buradan bir F (x, y, z) = 0 denklemi elde edilse bile bu bir yüzey
denklemidir ve bu yüzey, α(I) y içinde barndran bir yüzeydir. Bu nedenle,
R3 de bir e§ri tek denklemle verilmez. Ancak R3 te iki yüzeyin arakesiti
olarak bir e§ri tanmlanabilir. Buna en güzel örnek koniklerdir. Mesela bir
elips bir dik dairesel silindir ve bir düzlemin arakesitidir.
Örnek 1.1.8
x2 + y 2 + z 2 = 1
küre yüzeyi ve
x2 + y 2 = 1, z = k
dik dairesel silindir yüzeyinin arakesit e§risini bulunuz.
Çözüm için bu iki yüzeyin arakesitini bulalm:
x2 + y 2 + z 2 = x2 + y 2
z2 = 0
z = 0.
Yani arakesit e§risi z = 0 düzlemindeki çember e§risidir.
3) Verilen bir e§ri birden fazla ³ekilde parametrelendirilebilir.
Uyar 3 bir di§er soruyu gündeme getirir. Bir e§riyi verilen parametrik
temsil ile ifade etmek tek türlü müdür?
Yani, (t, t2 , 0), α1 : I1 → R3 ve ( 12 t∗ , 41 t2∗ , 0), α2 : I2 → R3 verilen iki e§ri
olsun, bu e§riler farkl mdr? Ortak özellikleri nelerdir?
Bu sorulara cevap arayalm.
1.1 DFERENSYELLENEBLR ER VE PARAMETRK TEMSL 5
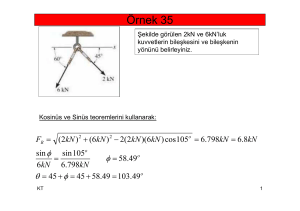
Tanm 1.1.9 I, I∗ ⊂ R açk aralklar, α : I → R3 bir e§ri h : I∗ → I bir
diferensiyellenebilir fonksiyon olsun.
α ◦ h : α∗ : I∗ → R3
diferensiyellenebilir fonksiyonu bir e§ridir ve α nn yeniden parametrizasyonu
olarak adlandrlr.
z
a(I)
y
a
x
a = a oh
*
I
I*
h
ekil 1.2: E§rilerin farkl parametrelerle temsili
Genel olarak t 6= t∗ oldu§undan, α∗ (t∗ ) ile α(t) ye ula³mak farkl, ama
bir bütün olarak dü³ünüldü§ünde α(I) ile α∗ (I∗ ) ayndrlar. α∗ üzerindeki
bir noktay bulmak için α nn (α1 (t), α2 (t), α3 (t)) koordinatlarnda t = h(t∗ )
yazmak yeterlidir.
Tanm 1.1.10 α : I → R3 e§risi verildi§inde, ∀t ∈ I için α0 (t) 6= 0 ise α ya
regüler e§ri denir.
Örnek 1.1.11
α : [0, 2π] → R2 , α(t) = (cos t, sin t)
I = [0, 2π] , I∗ = [0, π] ,
h : I∗ → I,
h(s) = 2s,
α∗ (s) = (α ◦ h)(s) = α(h(s)) = α(2s)
= (cos 2s, sin |{z}
2s ) = (cos t, sin t) = α(t)
t
6
II. DERS
R3 te ERLER ve VEKTÖR ALANLARI
Tanm 1.1.12 Yukardaki kabul ve notasyonlarla, e§er h regüler yani
dh
6= 0, ∀t∗ ∈ I∗
dt∗
ise h : I∗ → I dif. bilir fonksiyonuna kabul edilebilir(allowable) parametre
fonksiyonu denir.
R3 te tanml olan tüm C k e§riler cümlesi C k (R3 ) olsun.
Tanm 1.1.13 α, α∗ ∈ C k (R3 ) için, ∃ h, C r parametrik fonksiyonu
α∗ = α ◦ h
olacak ³ekilde var ise α ve α∗ a ba§lantldrlar denir.
Verilen ba§nt bir denklik ba§ntsdr. öyle ki;
Yansma özelli§i:
α ◦ I = α ve I regüler oldu§undan α ∼ α
Simetri özelli§i:
α ∼ α∗ ⇒ α ◦ h = α∗ ⇒ α = α∗ ◦ h−1 ⇒ α∗ ∼ α
Geçi³me özelli§i:
α ∼ α∗ ve α∗ ∼ α∗∗ ⇒ α◦h = α∗ ve α∗ ◦h0 = α∗∗ ⇒ α◦h ◦h0 = α∗∗ ⇒ α ∼ α∗∗
C k (R3 )/ ∼ bölüm uzaynda her bir denklik snf bir C k e§ridir. Her denklik snf bir elemanyla temsil edilebildi§inden temsilci bir elemanla i³lem
yapmak yeterlidir.
Tanm 1.1.14 Bir α : I → R3 e§risi verildi§inde bir p > 0 says
α(t + p) = α(t),
∀t ∈ I
olacak ³ekilde var ise e§riye periyodiktir denir. Böyle saylarn en küçü§üne
e§rinin periyodu denir.
Kapal olmayan bir e§riye bazen yay ad verilir. Böyle bir e§rinin her
parametrizasyonu 1:1 dir. Mesela,
α(t) = (r cosh t, r sinh t, 0), x1 > 0
hiperbol e§risi (tek kanat) bir yaydr.
Bir C e§risi kendini bir P noktasnda kesiyor ise P ye C nin katl noktas
denir.
1.2 Al³trmalar
7
P
ekil 1.3: Katl noktal e§ri
Tanm 1.1.15 Katl noktas olmayan bir C e§risine basit e§ri denir.
Çember, elips, hiperbol basit e§ri örnekleridirler. Basit e§ri, kendini kesmemek
kaydyla, kapal e§ri olabilir. Basit bir e§rinin kapal olmas için gerek ve yeter
³art e§rinin bir çembere homeomork olmasdr.
Bütün noktalar ayn bir düzlemde olan e§riye düzlem e§ri denir. Küre,
koni gibi yüzeylerle bir düzlemin arakesit e§rileri düzlem e§ri örne§idirler.
Düzlem e§ri olmayan e§rilere bükümlü (twisted) e§ri denir.
1.2 Al³trmalar
Al³trma 1.2.1 A³a§daki e§rilerin parametrik temsillerini bulunuz.
a) i) (2, 3, 4), (4, 5, 6) noktalarndan geçen do§ru
ii) (2, 5, 8), (9, 6, −3) noktalarndan geçen do§ru
iii) (3, 1), (5, 4), (6, 1) noktalarndan geçen çemberin kapal denklemini
ve parametrik ifadesini hesaplaynz.
¾
6x1 − 4x2 + x3 = 20
b) i)
Düzlemlerinin arakesit e§risi
2x1 + x2 − x3 = 1
¾
6x1 + 13x2 − 2x3 = 20
ii)
Düzlemlerinin arakesit e§risi
3x1 − 4x2 + 4x3 = 5
Al³trma 1.2.2 α : I → R3 fonksiyonu α(t) = (3t, et , 1t ) olarak verilsin. α
nn C ∞ oldu§unu gösteriniz. C ∞ ile her mertebeden diferensiyellenebilirlik
kastedilir.
8
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
Diferensiyellenebilir e§ri tanmndan biliyoruz ki, e§ri iyi tanml do§rultu ve
noktaya ba§l hza sahiptir. Ancak do§rultunun birden fazla oldu§u ve hzn
olmad§ özel noktalar olabilir. Mesela, α : I → R3 , α(t) = (t2 , t3 , 0) e§risinin
t0 = 0 noktasnda yön birden fazladr ve hz sfrdr. E§rinin hznn sfrdan
farkl oldu§u noktalarda, e§ri mutlak de§erce ölçülebilir bir hza sahiptir.
Bir e§rinin do§rultu ve hz kavramlar, "hz vektörü" veya "tanjant vektör" kavram ile takdim edilir. Öncelikle bir e§rinin yay-uzunlu§u kavramndan bahsedelim.
α : I → R3 ,
α(t) = (α1 (t), α2 (t), α3 (t))
bir dif.bilir e§ri olsun.
dα1 (t) dα2 (t) dα3 (t)
dα(t)
= α0 (t) = (
,
,
)
dt
dt
dt
dt
olarak tanml olan α0 (t) fonksiyonu da
α 0 : I → R3
³eklinde bir vektör de§erli fonksiyondur. ∀ t ∈ I için α0 (t) bir vektördür ve
büyüklü§ü
° 0 ° ­ 0
®1
°α (t)° = α (t), α0 (t) 2
ile bellidir. t = t0 için α(t0 ) daki hz α0 (t0 ) dr.
° 0°
°
°
°α ° : I → R, t → °α0 (t)°
fonksiyonuna α e§risinin "hz fonksiyonu" denir.
Analiz derslerinden bilindi§i gibi, a, b ∈ I (a < b) için
Z
a
b°
°
°α0 (t)° dt =
Z bq
α10 (t)2 + α2 0 (t)2 + α30 (t)2 dt
a
integral de§eri, α e§risinin α(a), α(b) noktalar arasndaki parçasnn uzunlu§unun de§erini verir. b sabit de§eri t de§i³keni ile de§i³tirilirse
Z t
° 0 °
°α (t)° dt
S(t) =
a
yay uzunlu§u fonksiyonu olarak takdim edilir.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
9
Lemma 1.3.1 Bir α e§risinin belli bir yaynn uzunlu§u parametre seçimin-
den ba§mszdr.
spat. α : I → R3 , t → α(t) bir dif.bilir e§ri bir di§er parametrizasyonu
α∗ : I∗ → R3 olsun.
z
y
a
x
a
*
t
t
I
I*
*
h
ekil 1.4:
h parametre de§i³imi fonksiyonu olsun. t = h(s) dr. h(s1 ) = t1 , h(s2 ) =
t2 , I = (t1 , t2 ), I∗ = (s1 , s2 ) ile gösterelim.
dα∗
dα(h(s))
dα(h(s)) dh(s)
dα(t) dh(s)
=
=
=
ds
ds
dh(s)
ds
dt
ds
(*)
ve t = h(s) için;
dh(s)
ds.
ds
(* ) denkleminin difarensiyeli alnp (**) denklemi yerine yazlrsa
dt =
(**)
dα∗
dα(t) dh(s)
dα(t)
ds =
ds =
dt
ds
dt
ds
dt
elde edilir. Bu de§erleri yay uzunlu§u fonksiyonunda yerine yazarsak
°
Zt2 ° °
Zs2 °
° dα∗ °
° °
°
° ds = ° dα ° dt
° ds °
° dt °
s1
t1
elde edilir. Bu iddia edilendi.
Bir e§rinin hz vektörünün bir birim uzunlukta olmas ilginçtir. öyle ki;
α : (a, b) → R3 , t → α(t)
10
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
regüler e§risi için
olsun. O zaman;
° °
° dα °
° °=1
° dt °
Zb
Zb ° °
° dα °
° ° dt = dt = b − a
° dt °
a
a
elde edilir. Yani, α(I) e§risinin uzunlu§u e§rinin tanmland§ aral§n uzunlu§una e³ittir. Bu da ³öyle yorumlanabilir. E§ri; (a, b) açk aral§nn, diferensiyel özellikleri sakl kalmak kaydyla, ziksel biçim de§i³tirmi³ ³eklidir. Bir
e§rinin hzn 1 birim yapan parametreye e§rinin yay uzunlu§u parametresi
denir. Bu parametre genel olarak s haryle gösterilir.
lginç ve kolayla³trc bir özellikte, regüler her e§ri için böyle bir parametrenin varl§dr. Bunu bir lemma ile verilecektir.
Lemma 1.3.2 Regüler her e§ri yay uzunlu§u parametresi ile parametrelendirilebilir.
spat. Bir α : I → R3 regüler e§risi verildi§inde bir h : J → I parame-
tre de§i³iminin, k(α ◦ h)0 (s)k = 1 olacak ³ekilde var oldu§unu göstermemiz
gerekir.
t0 ∈ I belli bir eleman olmak üzere, s yi
°
Zt °
° d(α) °
°
° du
s(t) = °
d(u) °
t0
³eklinde tanmlayalm. (α ◦ h)(s) = α∗ (s) yi ele alalm.
dα∗
dα dh(s)
dα dt
=
=
.
ds
dh(s) ds
dt ds
Ayrca,
dt
dh(s)
=
=
ds
ds
1
dh−1 (t)
dt
=
1
ds
dt
.
°
Zt °
° d(α) °
°
s(t) = °
° d(u) ° du
t0
e³itli§inden türev alnrsa
ds
dt
= kα0 (t)k elde edilir. Böylece
dα∗
dα 1
=
ds
dt kα0 (t)k
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
ve
11
°
° ° °° ° ° °
° dα∗ ° ° dα ° ° dt ° ° dα ° 1
°
° ° °° ° ° °
° =1
° ds ° = ° dt ° ° ds ° = ° dt ° °
° dα °
dt
bulunur. ddia do§rudur.
Devam eden bölümde kullanaca§mz bir kavram hakknda ksa bir hatrlatma yapalm. Konunun bütünlü§ü bozulmasn diye analz dersine ait hatrlatmay önceye aldk.
Hatrlatma: (Analiz derslerinden, türev dönü³ümüyle ilgili ksa bir hatr-
latma)
F : U ⊆ Rn → Rm ,
(1 ≤ n, m ≤ 3 olsun.)
ksmi türevlere sahip bir dönü³üm olsun. F nin türev dönü³ümü T U ve T Rm
arasnda tanml, lineer bir dönü³ümdür ve kar³ gelen jakobiyen matris,
JF = F∗ =
∂f1
∂x1
..
.
∂fm
∂x1
···
..
.
···
∂f1
∂xn
..
.
∂fm
∂xn
³eklinde yazlr..
F, 1 : 1 ise F∗ bir izomorzmdir (Tanm, de§er cümleleri üstündeki kstlamayla).
Mesela;
F : R2 → R3
(x1 , x2 ) → (x1 x2 , x1 + x2 , x21 + x22 )
, p = (1, 2), v = (3, −2) için,
x2 x1
x2 x1
2 1
1 , F∗|p = 1
1 = 1 1
F∗ = 1
2x1 2x2
2x1 2x2 p
2 4
¸
2 1 ·
4
3
F (p) = (2, 3, 5), F∗|p (v) = 1 1
= 1 ,
−2
2 4
−2
F∗ (vp ) = ((2, 3, 5), (4, 1, −2))¥
12
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
1.3.1 Te§et Vektör-Te§et Vektör Alan
Bu kesimden itibaren bir e§rinin Frenet çat alannn in³asyla ilgilece§iz.
Bir e§ri α : I → R3 diferensiyellenebilir fonksiyon ile tanmlanr. Diferensiyellenebilir e§ri, iyi tanml do§rultu ve noktaya ba§l hza sahiptir. yi
tanmllktan kast, parametre de§i³imiyle do§rultunun ve hzn sfr olup olmamasnn de§i³memesidir. hzn sfr olmad§ noktalarda, hzn kesin bir
ölçüsünden bahsedemeyiz. Bu farkllk parametrizasyondan kaynaklanr. Bir
e§rinin do§rultusu ve hz kavram hz vektörü veya tanjant vektörü çerçevesinde
dü³ünülür.
α : I → R3 , s → α(s) = (α1 (s), α2 (s), α3 (s))
diferensiyellenebilir bir e§ri olsun.
α∗ : T I ∗ → T R3 ,
dα1
α∗ =
α∗ (s)s =
dα1
ds
dα2
ds
dα3
ds
ds
dα2
ds
dα3
ds
[1] = (α10 (s), α20 (s), α30 (s))
a(s)
a(s)
a
a(s)
1
s
I
ekil 1.5:
Tanm 1.3.3
dα
|
ds α(s)
vektörüne e§rinin α(s) noktasndaki te§et vektör denir.
t(s) =
t : I → T R3 , s → t(s)
fonksiyonuna da e§rinin te§et vektör alan denir.
a(I)
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
1.3.2
13
Oskülatör Düzlem, Oskülatör Çember, E§rilik Vektörü,
Asli Normal Vektörü
Bir e§rinin do§rultu ve hz e§rinin tanjant vektörü (te§et vektörü) veya
te§et vektör alanyla belirtilir. Bir e§rinin bir do§tultudan özellikle te§et
do§rultusundan sapmasn (ki buna e§rinin e§rilmesi denilecektir.) ölçen bir
vektör var mdr? Bu vektörün e§riyle ba§lants nedir? Bu kesimde bu sorulara cevap aranacaktr. A³a§daki ³ekiller sezgisel olarak bir e§rinin e§rilmesi
hakknda kir vermek içindir.
Az eðilmiþ
Çok fazla eðilmiþ
(a
Çok eðilmiþ
(a) Her yerde ayný
derecede
eðilmiþ
(b) Eðilmemiþ
ekil 1.6:
R
oo
b ve c arasnda bir yaknlk kurulabilir. Bir do§ru bir noktas çkarlm³
bir çemberin dejenere hali (yani yarçap→ ∞) olarak dü³ünülebilir.
R
r
(d)
ekil 1.7:
Dikkat edilirse; yarçap büyüdükçe e§ilme azalmakta ve R → ∞ için
çember bir do§ru olarak dü³ünülebilmektedir.
14
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
O halde yarçapn çarpmaya göre tersi, bükülmenin kabul edilebilir bir ölçüsü
olarak alnabilir. R → ∞ iken,
1
1
1
>
> lim
=0
r
R R→∞ R
olur. Bu ili³kiyi herhangi e§rilere ta³yabilmek için, e§rinin noktalar ilgili
noktada bir do§ru ve çembere ihtiyaç olacaktr. E§rinin do§rultusu, o noktadaki te§et do§rultu mevcuttur. Geriye i³e yarar bir çember tanmlama
kalr.
α : I → R3
e§risi verilsin. α üzerinde kom³u üç nokta
α(t0 ), α(t1 ), α(t2 ),
t2 → t1 → t0
olsun. Bu üç nokta R3 te bir düzlem tanmlar.
P
Q
R
ekil 1.8:
t2 → t1 → t0 , α(t2 ) → α(t1 ) → α(t0 )
R → Q ve Q → P iken, e§riye ait iki tanjant vektör söz konusudur.
Bunlar,
−−−−−−−→
−−−−−−−→
(α(t0 ), α(t0 )α(t1 )) ve (α(t1 ), α(t1 )α(t2 ))
tanjant vektörlerdir. Limit konumunda bu iki vektör P = α(t0 ) noktasndaki
tanjant vektörlerdir.
Tanm 1.3.4 α : I → R3 bir e§ri, P, Q ve R e§ri üzerinde, Q → P, R → Q
olan üç nokta olsun. P de belli olan P Q, QR vektörlerinin gerdi§i düzleme
e§rinin P = α(t0 ) noktasndaki oskülatör (osculating) düzlemi denir.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
1.3.3
15
Oskülatör Düzlem Denklemi
Üç noktas belli olan düzlem denklemi bilinen bir kavramdr. Ancak burada
oskülatör düzlemin denklemi e§ri ve türevleri cinsinden hesaplanacaktr.
Hatrlatmak gerekirse "Rolle teoremi: f , [a, b] aral§nda sürekli, (a, b) aral§nda diferensiyellenebilir bir fonksiyon olsun. f (a) = f (b) ise enaz bir
c ∈ (a, b) reel says f 0 (c) = 0 olacak ³ekilde vardr" idi. Oskülatör düzlemin
denklemini ararken kullanaca§mz yardmc bir f fonksiyonunu ³öyle tanmlayalm.
Normali N olan key
düzlem D, A bu düzemin bir noktas ve A nn yer
D bir
−
→E
−
→
−
→
vektörü a olsun. a , N = a ile gösterelim. Bir f (t) fonksiyonunu α(t)
boyunca,
D
−
→E
f (t) = α(t), N − a
olarak tanmlayalm. a, A nn seçimine ba§l oldu§undan, ∀t için,
D
−
→E
f (t) = α(t), N − a = a − a = 0,
α(t) ∈ D
yani f (t) bir sabit fonksiyondur. Rolle teoremini uygulayalm. t = t0 , t1 , t2
için;
f (t0 ) = 0, f (t1 ) = 0 ve f (t2 ) = 0
oldu§undan, γ1 ve γ2 reel saylar
f 0 (γ1 ) = 0,
0
f (γ2 ) = 0,
t 0 < γ 1 < t1
t 1 < γ 2 < t2
olacak sekilde vardr. Tekrar Rolle teoremi uygulanrsa bir γ3 reel says
f 00 (γ3 ) = 0,
γ1 < γ3 < γ2
olacak ³ekilde bulunabilir.
imdi seçilen bu düzlemin e§riye ait oskülatör düzlem olmas durumuna
dönelim.
α(t2 ) → α(t1 ) → α(t0 )
iken t1 , t2 , γ1 , γ2 ve γ3 → t0 dr. Bu durumda,
D
−
→E
f (t) = α(t), N −a = 0 ve a = hX, N i (X bir temsilci nokta oldu§undan)
→
−E
α0 (t), N = 0
D
−
→E
f 00 (t) =
α00 (t), N = 0
f 0 (t) =
D
16
II. DERS
R3 te ERLER ve VEKTÖR ALANLARI
hX − α(t), N i = 0
­ 0
®
α (t), N = 0
­ 00
®
α (t), N = 0
elde edilir. Yani X − α(t), α0 (t) ve α00 (t), normali N olan düzlemdedirler. O
halde,
X − α(t) = λα0 (t) + µα00 (t)
lineer ba§nts sa§lanr. Karma çarpm notasyonlaryla,
det(X − α(t), α0 (t), α00 (t)) = 0
dr.
E§ri yay parametresi ile verilmi³ ise türev ()0 ile gösterilirse, oskülatör
düzlemin denklemi,
det(X − α(s), α0 (s), α00 (s)) = 0
ile verilir.
α00 (s) 6= 0 ise, s ye yakn s0, s1 , s2 için α(s0 ), α(s1 ), α(s2 ) ayn bir do§ru
üzerinde olamaz.
Bir α e§risinin kom³u üç α(t0 ), α(t1 ), α(t2 ) noktalarnn ayn do§ru üzerinde olmad§n varsayalm. (α00 6= 0)
R=a(t2)
1
S
a(t)
P=a(t0)
Q=a(t1)
ekil 1.9:
Bu üç nokta bir çember üzerindedir ve bu çemberin merkezi P Q ve QR
kiri³lerinin orta dikmelerinin kesim noktasdr.
α(t2 ) → α(t1 ) → α(t0 )
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
17
limit konumunda bu ard³k üç noktadan geçen iyi tanml bir çember vardr
ve bu çemberin merkezi α(t) noktasnda e§rinin te§etine dik olan do§rultu
üzerindedir. Bu çembere (S 0 ile gösterilecek) e§rinin α(t) noktasndaki e§rilik
(oskülatör) çemberi denir.
Tanm 1.3.5 α(t) e§risinin bir noktasndaki S 0 e§rilik çemberinin yarçapnn
çarpm inversine e§rinin o noktadaki (mutlak) e§rili§i, çemberin merkezine
de e§rilik merkezi denir.
Tanm 1.3.6 (α00 (t) = 0 ∨ α00 (t) = λα0 (t)) ve α000 (t) 6= 0 e³itliklerini
sa§layan bir noktaya e§rinin bükülme (inexion-e§rilme) noktas denir.
Not: Böyle bir noktada oskülatör düzlemi tanml ama oskülatör çemberi
tanml de§ildir.
imdi mutlak e§rili§in nasl hesaplanaca§n bir teoremle verelim.
−−−→
→
−
Teorem
1.3.7 Bir α(s) e§risinin mutlak e§rili§i, α0 (s) = t olmak üzere,
°
°
→°
°−
° t 0 ° dür.
spat. α e§risi, yay uzunlu§u parametresiyle verilmi³ olsun.
−
→ dα
t =
, s∈I⊆R
ds
­ ®
­
®
ht, ti = 1 ⇒ t0 , t = 0 ⇒ α00 , α0 = 0 ⇒ α00 (s)⊥α0 (s).
α, α0 (s), α00 (s) ve M (merkez) oskülatör düzlemdedir. Dolaysyla,
M − α(s) = λα0 (s) + µα00 (s)
­
®
­
®
­
®
M − α(s), α0 (s) = λ α0 (s), α0 (s) + µ α00 (s), α0 (s)
= λ.
Türev alnrsa,
­ 0
® ­
®
−α (s), α0 (s) + M − α(s), α00 (s) = 0
­
®
M − α(s), α00 (s) = 1
M − α(s) ve α00 (s) ayn do§rultuda oldu§undan aralarndaki aç sfrdr.
(cos θ = 1) Normlar itibariyle,
°
°
kM − α(s)k °α00 (s)° = 1
1
kM − α(s)k =
00
kα (s)k
18
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
elde edilir. O halde e§rilik çemberinin yarçap R ile gösterilirse,
R = kM − α(s)k =
1
kα00 (s)k
ve dolaysyla mutlak e§rilik,
°
° °
°
1
= °α00 (s)° = °t0 (s)°
R
olarak bulunur.
Bir α : I → R3 e§risinin bir α(t) noktasnda oskülatör düzleme sahip
olmas için ∃k, k ≥ 2 için α(k) (t) türevinin sfrdan farkl olmas gerekir.
³öyle ki; (s yay parametresi olarak alnmak üzere)
­ 0
®
α (s), α0 (s)
=
(α0 (s)
⊥
­
®
1 ⇒ α0 (s), α00 (s) = 0
α00 (s) ∧ α00 (s) 6= 0) ⇒ spat tamam
­
®
E§er α00 (s) = 0 ⇒ α0 (s) ⊥ α00 (s) ⇒ α0 (s), α00 (s) = 0
­
® ­
®
⇒ α0 (s), α000 (s) + α00 (s), α00 (s) = 0
⇒ (α0 (s) ⊥ α000 (s) ∧ α000 (s) 6= 0) ⇒ spat tamam
­
®
E§er α000 (s) = 0 ⇒ α0 (s), α000 (s) = 0
E
­
® D
⇒ α00 (s), α000 (s) + α0 (s), α(4) (s) = 0
⇒ ...
⇒ α(k) (s) 6= 0
elde edinceye kadar devam edilir.Bu durumda ilgili noktada oskülatör düzlem,
Sp {α0 , α(k) }s
düzlemidir. Ancak bu durumda
szdr.
1
kα00 (s)k
yarçapl oskülatör çember anlam-
Tanm 1.3.8 α00 (s) vektörüne α e§risinin α(s) noktasndaki e§rilik vektörü
00
(s)
denir. kαα00 (s)k
birim vektörüne α(s) noktasndaki birim asli normal vektör
ve α(s) den geçen ve α00 (s) ye paralel olan do§ruya da asli normal do§rusu
denir.
→
Birim asli normal vektörü −
n ve asli e§rilik k ile gösterilecektir.
−
α00 (s) = k(s)→
n (s)
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
ve
R(s) =
19
1
|k(s)|
dir.
k ≡ 0 ⇒ α00 (s) = 0 ∨ α0 (s) = sabit,
∀s
dir. Do§rular e§rili§i sfr olan yegane e§rilerdir. k(s) tanjant vektörlerin
de§i³im orann ve ayrca e§rinin te§et do§rultusundan ne kadar sapt§n
gösterir. öyle ki; P ve Q noktalarndaki te§et vektörler
−
→
−
→
t (s) = t
−
→
−
→
−
→
t (s + 4s) = t + 4 t
olsun.
t+Dt
Dt
Q=a(s+Ds)
t
P=a(s)
t
ekil 1.10:
−
→
k4 t k
°
°
4ϕ
4ϕ
→°
° −
2 °
= °
,
sin
⇒
4
t
°
° = 2 sin
→°
°−
2
2
°t°
°
°
−°
° →
°4 t ° → 0 iken 4ϕ → 0
° °
→°
°−
°t°=1
ve sin fonksiyonunun seri açlmyla,
2 sin
4ϕ
4ϕ 3
4ϕ 5
−(
) +(
) − ...)
2
2
2
= 4ϕ + ...
¯ −
¯ ¯ ¯
¯ d→
°
°
¯
→°
¯ t ¯ ¯¯ dϕ ¯¯
° −
°4 t ° = 4ϕ, k = ¯
¯=
¯ ds ¯ ¯ ds ¯
4ϕ
2
= 2(
20
II. DERS
R3 te ERLER ve VEKTÖR ALANLARI
−
→
dt
ds
→
→
e§rite ait −
n birim asli normalini tek türlü tanmlar. −
n nin seçimi yön−
→ → 2
lendirmeye ba§ldr. t , −
n , R de pozitif yönlendirilmi³ olarak alnacaktr.
−
→
dt
→
= k−
n
ds
den,
−
→ −
→
k > 0 ise t , t 0 pozitif yönlendirilmi³,
n
t
ekil 1.11: Pozitif yönlendirilmi³
→
− −
→
k < 0 ise t , t 0 negatif yönlendirilmi³ demektir.
n
t
ekil 1.12: Negatif yönlendirilmi³
−
→ →
E§rinin yönlendirmesi nasl olursa olsun. t , −
n ikilisi pozitif yönlü olarak
alnacaktr. Ancak bu e§rilik çemberinin yerini de§i³tirmez. Çünkü e§rilik
çemberi α00 yani t0 ye göre hesaplanr.
−
→
n (s) e§ri boyunca sürekli bir vektör alan olarak ele alnd§nda, e§ri
bir ineksiyon noktasndan geçiyor ise k hem pozitif hem de negatif de§erler
alabilir.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
21
n
t
k<0
n
t
k>0
ekil 1.13:
1.3.4
Burulma (Torsiyon), Binormal Vektör
−
→
Tanm 1.3.9 α : I → R3 e§risine ait te§et ve normal vektörler t (s) ve
−
→
n (s) olmak üzere, s0 ∈ I için,
−
→
−
→
→
b (s0 ) = t (s0 ) × −
n (s0 )
vektörüne α(s0 ) noktasndaki binormal vektör denir.
→
−
b : I → R3 , s → b (s)
vektör alanna da α e§risinin binormal vektör alan ad verilir.
−
→
−
→
→
A³ikardr ki b , hem t ye hem de −
n ye dik oldu§undan oskülatör
düzleme diktir. Üstelik;
Teorem 1.3.10
−
→
db
ds
→
k−
n dir.
spat.
D−
D−
D−
→E
→ −
−
→ −
→ −
→ −
→ →
→E
→
−E
→E D−
b , t = 0 ⇒ b0 , t + b , t0 = 0 ⇒ b0 , t = 0 ⇒ b0 ⊥ t .
D→
D−
→ −
−
→ →
− −
→E
→E
−
b , b = 1 ⇒ b0 , b = 0 ⇒ b0 ⊥ b .
−
→ −
−
→ →
−
→ −
−
→
( b0 ⊥ t ve b0 ⊥ b ) ⇒ b0 k →
n.
−
→
→
Tanm 1.3.11 b0 k −
n oldu§undan, s ∈ I için
−
→0
→
b (s) = −τ (s)−
n (s)
e³itli§ini sa§layan τ (s) reel saysna α(s) noktasnda e§rinin burulmas
(bükülmesi) denir. τ 6= 0 ise e§riye bükümlü e§ri ad verilir.
22
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
1.3.5 Frenet Çat Alan, Te§et, Normal ve
Rektifyen Düzlemler
Bir α : I → R3 diferensiyellenebilir e§risi verildi§inde, ard³k ilk üç türevin
sfrdan farkl oldu§unu varsayalm. Bu durumda, e§ri yay parametresiyle
verilmi³ ise,
−
→
α0 = t
→
α00 = k −
n
−
idi. imdi α000 ü hesaplayalm. Bunun için →
n 0 yü hesaplamamz gerekir.
­− −
®
−
−
→
−
→ →
−
→
→
−
→
→
→
→
n,→
n0 = 0 ⇒ −
n ⊥→
n0 ⇒ −
n 0 ∈ Sp { t , b } ⇒ −
n0 = λ t +β b
h−
n,−
ni = 1 ⇒ →
D−
→ →0 E
λ = t ,−
n
D−
⇒
→ − 0E
β = b ,→
n
Ayrca,
D−
D−
E
D−
D−
→ →E
→ →0 E
− →E
→ − 0 E D→
→ →
n = −k
n = − t 0, −
n = 0 ⇒ t ,−
n + t 0, −
t ,−
n
= 0 ⇒ t ,→
D−
E
D
E
D
E
D
E
D
→ →
−
→ −0
→
− →
−
→ →0
−
→ →E
b ,−
n
= 0 ⇒ b ,→
n + b 0, −
n = 0 ⇒ b ,−
n = − b 0, −
n =τ
dolaysyla,
λ = −k, β = −τ
dur. O halde,
→
−
−
→
−
→
n 0 = −k t + τ b
sonuç olarak da,
−
→
−
→
→
α000 = k 0 −
n + k(−k t − τ b )
−
→
−
→
→
α000 = −k 2 t + k 0 −
n − kτ b )
elde edilmi³ olur. elde edilen e³itlikler
−
→
α0 = t
−
α00 = k →
n
−
→
−
→
→
000
α
= −k 2 t + k 0 −
n − kτ b
−−→ −−→ −−→
dir. Yani, α(s) e§risi boyunca tanml olan {t(s), n(s), b(s)} hareketli çats,
k = 1, 2, 3 için
−−→ −−→ −−→
α(k) (s) ∈ Sp {t(s), n(s), b(s)}
özelli§inde olan bir çatdr.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
→
−
23
−
→
→
Tanm 1.3.12 { t , −
n , b }(s) çatsna α(s) ⊂ R3 e§risinin Frenet çat alan
denir.
lar,
−
→
→
− −
t ,→
n , b vektörlerinin türevleri kendileri cinsinden hesaplanm³t. Bun→
−0
→
t = k−
n
−
→
−
→
→
−
0
n = −k t + τ b
→
−0
→
b = −τ −
n
idi. Bu formüllere Frenet
munda
→
−0
t
0
k
→
−
0
n
= −k 0
→
−0
0 −τ
b
formülleri denir. Bu e³itlikler matris çarpm for −
→
t
0
−
→
n
τ
,
−
→
0
b
olarak da yazlabilir
→
−
−
→
→
Tanm 1.3.13 Bir α : I → R3 e§risinin Frenet çats { t , −
n , b } olsun.
→
− →
Sp { t , −
n}
düzlemine e§rinin te§et düzlemi,
−
→
−
Sp {→
n, b }
düzlemine e§rinin normal düzlemi,
→
→
− −
Sp { t , b }
düzlemine e§rinin binormal düzlemi denir.
24
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
b
Rektifyen düzlem
Normal düzlem
Sp{b,t}
t
Sp{n,b}
Teðet düzlem
n
Sp{t,n}
ekil 1.14: Te§et düzlem, normal düzlem, rektifyen düzlem
Te§et düzlem denklemi:
D
−
→E
→
− →
det(X − α(s), t , −
n )veya X − α(s), b = 0
Normal düzlem denklemi:
D
−
→
−
→E
−
det(X − α(s), →
n , b )veya X − α(s), t = 0
Rektifyen düzlem denklemi:
→
− −
→
→
det(X − α(s), b , t )veya hX − α(s), −
n i = 0.
1.3.6 E§rilerin Lokal Teorisinin Temel Teoremi
Teorem 1.3.14 k(s) > 0 ve k(s), s ∈ I diferensiyellenebilir fonksiyonlar
verildi§inde bir α : I → R3 regüler parametrelendirilmi³ e§ri, e§rili§i k(s) ve
burulmas τ (s) olacak ³ekilde vardr. Ayrca bir ba³ka α e§risi ayn ³artlar
sa§lyor ise, α ve α bir kat hareketle birbirlerine dönü³ür. (Yani, bu durumda, R3 ün bir, pozitif determinantl, L lineer ortpgonal dönü³ümü ve bir
c vektörü
α = L0 α + c
e³itli§ini sa§layacak ³ekilde vardr.)
spat. Adi diferansiyel denklemlerin çözümünün varl§ ve tekli§i teoreminin
ispatyla ayndr. Bu sebeple ispat burada tekrar verilmeyecektir.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
1.3.7
25
Lokal Kanonik Form ve Oskülatör Düzlemler Üzerine
zdü³üm
Bu kesimin amac, e§rilik ve burulmann , e§rinin bir noktas civarnda
e§rinin ³ekline nasl etki etti§ini göstermektir.
Bir α : I → R3 e§risi verilsin. E§rinin birinci mertebeden singüler noktaya sahip olmad§n varsayalm. E§rinin herbir koordinat fonksiyonu diferensiyellenebilir oldu§undan, Taylor serisine açlabilir. α(s) = (α1 (s), α2 (s), α3 (s))
için,
s2
sn (n)
αi (s) = αi (0) + sαi0 (0) + αi00 (0) + ... + αi (0) + ...
2!
n!
olup,
s2
s3
α(s) = α(0) + sα0 (0) + α00 (0) + α000 (0) + R
2!
3!
dir.
→
−
α0 (0) = t0
→
α00 (0) = k0 −
n
0
→
→
→−k τ −
000
2−
n
α (0) = −k0 t0 + α00 (0) + k00 −
0
0 0 b0
de§erleri yerine yazlrsa,
−
−
→ s2 → s3
→
−
→−k τ →
α(s) − α(0) = s t0 + k0 −
n0 + (−k02 t0 + α00 (0) + k00 −
n
0
0 0 b0 ) + R
2!
3!
α(s) − α(0) = (s − k02
→
s3 −
s2 s3
→
→ − k0 τ0 s3 −
) t0 + (k0 − k00 )−
n
b0 + R
0
3!
2!
3!
3!
s3+n → 0
n→∞
kabul edilirse, R → 0 olur. Böylece 0 a yeterince yakn s ler için,
→
s2 s3
s3 −
→
→ − k0 τ0 s3 −
) t0 + (k0 − k00 )−
n
b0 + R
0
3!
2!
3!
3!
→
−
→ − −
−
→
elde edilir. α(0) noktasndaki çat olarak {α(0); t , →
n , b } alnr ve t =
−
→
−
(1, 0, 0), →
n = (0, 1, 0), b = (0, 0, 1) olarak dü³ünülürse
−
→
−
→
→
α(s) = α(0) + x(s) t + y(s)−
n + z(s) b , R = (Rx , Ry , Rz )
α(s) = α(0) + (s − k02
bulunur. Burada,
3
x(s) = s − s6 k02 + Rx
2
3
y(s) = s2 k0 − s6 k00 + Ry
z(s) = − k06τ0 s3 + Rz
26
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
e³itlikleriyle verilen e§riye α(s) e§risinin lokal kanonik formu denir. Rx , Ry ,
Rz bundan sonraki i³lemlerde ihmal edilecektir. Ayrca s3+n → 0 oldu§u
hatrlanmaldr. α(s) nin kanonik formu α
e(s) ile gösterilirse,
n→∞
α(s) = α(0) + α
e(s)
→
→
− → −
yazlabilir. α(0) noktasnda t , −
n , b çats x, y, z koordinat sisteminin
görevini üstlenmi³ti. Buna göre,
−
→
t0
→
00
n
α (0) = k0 −
0
→
−
→−k τ −
000
2→
α (0) = −k0 t0 + α00 (0) + k00 −
n
0
0 0 b0
α0 (0) =
bile³enler cinsinden;
x0 = 1, y 0 = 0, z 0 = 0
x00 = 0, y 00 = k0 , z 00 = 0
x000 = −k02 , y 000 = k00 , z 000 = −k0 τ0
ve
Teorem 1.3.15 E§rinin te§et, normal ve rektifyen düzlemler üzerine izdü³ümleri
i) y = k20 x2 (xy−düzlem ∼
= tn−düzlem): te§et düzlem
ii) z = k06τ0 x3 (xz−düzlem ∼
= tb−düzlem): rektifyen düzlem
2
τ
2
iii) z 2 = 0 y 3 (yz−düzlem ∼
= nb−düzlem): normal düzlemdir.
9 k0
0
00
y
y
spat. i) lim xy2 = lim 2xx
0 = lim 2x02 =
ii) lim xz3 = lim
iii) i ve ii den
z0
3x2 x0
= ... = lim
k0
2
z 000
6(x0 )3
= − k06τ0
k0
z
k 0 τ0
y
= ,
=−
2
3
x
2
x
6
ve buradan;
(− k06τ0 x3 )2
z2
z2
2 τ02
2 τ02 3
2
⇒
=
=
⇒
z
=
y
2
y3
y3
9 k0
9 k0
( k02x )3
elde edilir.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
27
y
x
k0 2
2 x
ekil 1.15: y =
Oskülatör düzlem
y
x
ekil 1.16: z =
k0 τ 3
6 x
Rektifyen düzlem
y
x
ekil 1.17: z 2 =
2 τ0 3
9 k0 y
Normal düzlem
28
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
E§rinin Frenet yakla³m (kanonik temsili) noktadan noktaya farkllk
gösterir. Mesela s = 0 yerine s = s0 alnrsa Taylor açlnda 0 yerine s0 gelir
yani onksiyon MacLaurin serisine açlm³ olacaktr. Verilecek örnek buna
uygundur.
Örnek 1.3.16
α(t) = (cos t, sin t, t)
e§risinin (0, 1, π2 ) noktasndaki (t = π2 için) kanonik temsili olan e§riyi bulunuz.
α0 (t) = (− sin t, cos t, 1)
° 0 ° √
°α (t)° = 2
Zt √
√
s=
2du = 2t,
0
1
t= √ s
2
E§rinin yay parametresine göre ifadesi
1
1
1
α(s) = (cos √ s, sin √ s, √ s)
2
2
2
1
1
1
1
1
α0 (s) = (− √ sin √ s, √ cos √ s, √ ) = T
2
2
2
2
2
1
1
1
1
1
α00 (s) = (− √ cos √ s, − √ sin √ s, 0) = kN
2
2
2
2
2
ve
°
° 1
k = °α00 (s)° =
2
bulunur.
B = T ׯN
¯
¯
.
.
. ¯¯
¯
1 ¯
1
1
¯
= √ ¯ − sin √2 s cos √2 s 1 ¯
¯
2 ¯ − cos √1 s − sin √1 s 0 ¯¯
2
2
=
ve dolaysyla
1
1
1
√ (sin √ s, − cos √ s, 1)
2
2
2
1 1
1
1
1
B 0 = √ ( √ cos √ s, √ sin √ s, 0)
2 2
2
2
2
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
29
° 0°
°B ° = |τ | = 1
2
olur.
α(s) = α(0) + α
e(s)
ve
α
e(s) = α(s0 ) + [(s − s0 )2 − ks20
−
→
k s 0 τs 0
(s − s0 )3 bs0
6
(s − s0 ) −
(s − s0 )2
(s − s0 )3 0 −→
→
]ts0 + [
ks 0 −
ks0 ]ns0 −
3!
2!
3!
(s − π2 )2 1
π
π
1 (s − π2 ) −
→
α
e(s) = (0, 1, ) + [(s − )2 −
]ts0 + [
− 0]−
n→
s0 −
2
2
4
6
2
2
11
→
π −
22
(s − )3 bs0
6
2
1.3.8
Key (De§i³ken) Hzl E§riler çin Frenet Formülleri
(Elemanlar)
imdiye kadar, birim hzl e§riler için çal³malar yaptk. Bu kesimde, regüler
ve key hzl e§riler için Frenet formüllerinin ald§ biçimi ara³traca§z.
(Not: E§ri regüler iken yay parametresi ile parametrelendirilip i³lemlere
böyle devam edilebilece§i unutulmamaldr.)
α : I → R3 ,
t → α(t)
key hzl bir e§ri ve bunu temsil eden C e§risinin yay uzunlu§u cinsinden
ifadesi C : x(s) olsun.
a
x
t
s
ekil 1.18: C : x(s)
30
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
−
→
− → →
C : x(s) e§risinin Frenet takm {k, τ, t , −
n , b } olarak hesaplanabilir.
α için Frenet takm {γ, Γ, T, N, B} ile gösterilirse, bu takm
K = k(s) = k(s(t))
Γ = τ (s) = τ (s(t))
T
= t(s) = t(s(t))
N
= n(s) = n(s(t))
B = b(s) = b(s(t)),
s = s(t)
³eklinde bir yakla³mla hesaplanabilir.
k ve γ farkl fonksiyonlardr. Farkl aralklar üstünde tanmldrlar. α ve
C nin ortak parçalar üzerinde e§rili§i ayn tanmlarlar. Yani, α(t) = x(s(t))
nin ayn noktasnda γ(t) = k(s(t)) ayn olmaldrlar.
k ve γ için söylenenler τ ve Γ için de geçerlidir.
Ba³ka bir ifadeyle Frenet takm parametre seçiminden ba§mszdr, ancak hesaplan³lar farkldrlar.
Lemma 1.3.17 α = α(t) bir regüler e§ri, k > 0 ve v = kα0 (t)k olsun. {T,
N, B} e§riye ait Frenet vektörlerini göstermek üzere;
T 0 = KυN
N 0 = −KυT + ΓυB
B 0 = −KυN
dir.
spat. α e§risi yay uzunlu§u parametresiyle verilmi³ olsayd
K(t) = k(s(t)), Γ(t) = τ (s(t))
T = t(s), N = n(s), B = b(s)
yazlabilir. (#) e³itliklerinden türev alnrsa;
T 0 = t0 (s)
ve
ds
dt
ds
ds
ds
= kn = k(s(t))n
dt
dt
dt
= υ de§eri yerine yazlrsa
T 0 = KυN
(#)
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
31
elde edilir. Benzer ³ekilde,
N 0 = n0
ds
ds
= (−kt + τ b)
dt
dt
= (−k(s(t))t + τ (s(t))b)
ds
dt
N 0 = −KυT + ΓυB
ve i³lemler yaplrsa,
B 0 = −KυN
elde edilir.
α : I ⊂ R → R3
e§risinin hz için iki durum vardr.
1 ) Hz her noktada sabittir,
2 ) Hz noktaya göre de§i³ir.
Her noktada hz sabit ise, kα0 (t)k = c, e§ri çok basitçe yay parametresi
→
→
− → −
cinsinden ifade edilebilir. kα0 (t)k = 1 olunca, {k, τ, t , −
n , b } nasl hesaplanabilece§ini önceki bölümde gördük.
E§er kα0 (t)k = ν(t) ise, ν(t) 6= sabit ise, iki ³ey yaplabilir.
Z
s = ν(t)dt
den s hesaplanr ve α(s) yazlr. Ancak bu her zaman pratik bir yol de§ildir
ve/veya gerekmez de. O zaman, e§riyi yay- parametresi cinsinden ifade etmeden
Frenet elemanlar için formül geli³tirmeliyiz.
α(t), α : I → R3
verilsin. Te§et birim vektör tanm gere§ince,
T =
α0
kα0 k
dür.
Normal, dolaysyla birim normal T ye dik olan ve Sp {α0 , α00 } düzleminde
α00
olan vektördür. Ancak, birim hzl e§ride oldu§u gibi, kα
00 k nün birim nor0
00
0
mal vektör olmasn bekleyemeyiz. α × α vektörü Sp {α , α00 } düzlemine dik
oldu§undan, birim binormal vektör olarak
B=
α0 × α00
kα0 × α00 k
32
II. DERS
R3 te ERLER ve VEKTÖR ALANLARI
vektörü alnabilir. N, α0 , α00 cinsinden açk hesab yaplarak,
N
elde edilir.
= B×T
α0 × α00
α0
× 0
=
0
00
kα × α k kα k
­ 0 0 ® 00 ­ 0 00 ® 0
1
=
(
α ,α α − α ,α α )
kα0 k kα0 × α00 k
° 0 °2 00 ­ 0 00 ® 0
1
°α ° α − α , α α )
=
(
kα0 k kα0 × α00 k
N ∈ Sp {α0 , α00 }
dür. Böylece bir ksmnn ispat yaplm³ olan a³a§daki teorem yazlabilir.
Teorem 1.3.18
α : I → R3
key hzl bir e§ri olmak üzere, e§rinin Frenet elemanlar ³öyledir:
T =
α0
kα0 k
N =B×T
B=
α0 × α00
kα0 × α00 k
K=
kα0 × α00 k
kα0 k3
Γ=
hα0 × α00 , α000 i
kα0 × α00 k2
Örnek 1.3.19
α(t) = (t,
t2 t3
, )
2 6
e§risi için Frenet elemanlarn bulunuz.
Çözüm 1.3.20 α(t) nin türevleri
α0 (t) = (1, t,
t2
)
2
α00 (t) = (0, 1, t)
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
33
α000 (t) = (0, 0, 1)
³eklindedir.
Buradan,
elde edilir.
­ 0
®
t4
α (t), α0 (t) = 1 + t2 +
4
° 1p
°
1
υ = °α0 (t)° =
4 + 4t2 + t4 = (t2 + 2)
2
2
t2
α0 (t) × α00 (t) = ( , −t, 1)
2
r
4
°
° 0
°α (t) × α00 (t)° = ( t + t2 + 1) = 1 (t2 + 2)
4
2
­ 0
®
α (t) × α00 (t), α000 (t) = 1
Bu hesaplamalar kullanarak T, N, B, K, Γ a³a§daki ³ekilde bulunur:
2
(1, t, t2 )
(2, 2t, t2 )
α0
=
=
T =
1 2
kα0 k
t2 + 2
2 (t + 2)
2
( t2 , −t, 1)
α0 × α00
(t2 , −2t, 2)
B=
=
=
1 2
kα0 × α00 k
t2 + 2
2 (t + 2)
K=
Γ=
N = B×T =
1 2
kα0 × α00 k
2 (t + 2)
=
= 4(t2 + 2)−2
1 2
3
0
( 2 (t + 2))3
kα k
1
hα0 × α00 , α000 i
= 4(t2 + 2)−2
2 = 1 2
0
00
( 2 (t + 2))2
kα × α k
(t2 , −2t, 2) (2, 2t, t2 )
1
× 2
= 4
(−2t3 −4t, 4−t4 , 2t3 +4t)
2
t +2
t +2
(t + 2t2 + 4)
34
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
1.3.9 GENEL ÖRNEKLER
Örnek 1.3.21 α(t) = (a cos t, a sin t, bt) e§risini yay parametresi ile parametrelendiriniz.
Çözüm 1.3.22
α0 (t) = (−a sin t, a cos t, b)
p
° 0 °
°α (t)° =
a2 + b2
Z tp
p
s=
a2 + b2 dt = a2 + b2 t
0
s
,
s = s(t)
t= √
a2 + b2
α∗ (s(t)) = α∗ ( √a2s+b2 ) ve ayn notasyonlar kullanlarak
s
s
s
α(s) = (a cos √
, a sin √
, b√
)
2
2
2
2
2
a +b
a +b
a + b2
birim hzl e§ri elde edilir.
Örnek 1.3.23 Bütün noktalar ayn düzlem içinde kalan e§riye düzlem e§ri
denir. Bir α : I → R3 e§risinin düzlemsel olmas için gerek ve yeter ³art
τ = 0 olmasdr. Gösteriniz.
→
→
− − −
Çözüm 1.3.24 α : I → R3 e§risine ait Frenet elemanlar t , →
n , b , k, τ
olsun.
→
−
−
→
−
τ = 0 ⇒ b0 = τ →
n den b0 = 0, ∀s
→
−
elde edilir. b0 = 0 ise e§rinin bütün noktalar b = sbt normalli düzlemdedir.
→
−
→
Bu düzlem t ve −
n nin gerdi§i düzlemdir.
→
→
Tersine, e§ri bir düzlem e§ri olsun. R3 ün −
p ve −
q gibi iki vektörünü
D−−→
E
→
→
α(s) − −
p ,−
q =0
−
olacak ³ekilde seçelim. →
q ilgili düzlemin normalidir.
D−−−→ E
→
0 (s), −
E
D−−→
α
q
=
0
→
−
E
α(s) − −
p ,→
q
= 0 ⇒ D−−−→ −
α00 (s), →
q =0
−
→
→
−
→
⇒ (−
q ⊥ t ve →
q ⊥−
n)
−
→
−
→
⇒ q k b
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
−
→
ve b =
−
→
q
−
→
q
k k
35
için
−
→0
→
−
−
b = 0 ⇒ b0 = τ →
n
den
τ =0
elde edilir.
Bu problemde ayrca ³u gösterilmi³ oldu. E§ri düzlemsel e§ri ise, e§rinin
içinde kald§ düzlem te§et ve normalin gerdi§i düzlemdir.
Örnek 1.3.25 (a, b) merkezli r yarçapl çemberin oskülatör (e§rilik) çem-
beri kendisidir, gösteriniz.
Çözüm 1.3.26
α(t) = (a + r cos t, b + r sin t)
α0 (t) = (−r sin t, r cos t)
° 0 °
°α (t)° = r
E§ri birim hzl de§ildir. Önce yay parametresi cinsinden yazalm.
Z t
s=
rdt = rt
0
oldu§undan
t=
s
r
yazlr.
s
s
α(s) = (a + r cos , b + r sin )
r
r
s
s
α0 (s) = (− sin , cos )
r
r
° 0 °
→
°α (t)° = 1 ⇒ −
t (s) = α0 (s)
−
→0
1
s 1
s
t (s) = α00 (s) = (− cos , − sin )
r
r r
r
° 00 ° 1
°α (s)° =
r
s
s
α00 (s)
→
−
= (− cos , − sin )
n =
00
kα (s)k
r
r
36
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
Oskülatör (e§rilik)
berinin merkezi M
−−→
OM =
=
=
=
°→
°
1
°− ° 1
= ° t0 (s)° = ⇒ R = r
R
r
1
1
k=
den k = (e§rilik)
R
r
çemberinin yarçap R = r dir. Oskülatör (e§rilik) çemolsun.
−→
→
Oα + R−
n
s
s
s
s
(a + r cos , b + r sin ) + R(− cos , − sin )
r
r
r
r
s
s
s
s
(a + r cos , b + r sin ) + r(− cos , − sin )
r
r
r
r
(a, b)
M = (a, b)
E§rilik çemberi, merkezi (a, b), yarçap R = r olan çemberdir. Yani, e§rilik
çemberi verilen e§rinin kendisidir.
Örnek 1.3.27 α : I → R3 , s → α(s) e§risinin üç ard³k türevi
a-) α0 (s), α00 (s), α000 (s) (α00 (s) 6= 0) olsun. E§rinin burulmas τ (s) ise,
τ (s) = −
(α0 (s), α00 (s), α000 (s))
hα00 (s), α00 (s)i
dir. Gösteriniz.
b-) Bir e§rinin burulmas yön seçiminden ba§mszdr. Gösteriniz.
Çözüm 1.3.28 a-)
D−
−
→0
→ →E
→
→
→
−
→
b = −τ −
n ⇒ b0 , −
n = − hτ −
n,−
n i = −τ h→
n,−
n i = −τ
−
→0
−
→ → →
→
−
→ →0
− −
b =( t ×−
n ) = ( t0 × −
n + t × n0 )
oldu§undan
D−
→ →E D −
→ − −
− →E
→
− → −
− →
− →
→ →
→
−
→ →
−
→ →
τ = − b0 , −
n = ( t0 × →
n + t × n0 ), −
n = ( t0 , −
n , t )+( t , n0 , −
n ) = −( t , n0 , −
n)
→
−
t = α0
α00
−
→
n =
k
00
−
→0
α
α000 k − k 0 α00
n = ( )0 =
k
k2
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
37
− →
α000 k − k 0 α00 α000
−
→ →
= −( t , n0 , −
n ) = (α0 ,
,
)
k2
k
k 0 α00 α00
α000 α00
= −(α0 ,
, ) + (α0 , 2 , )
k k
k
k
(α0 , α000 , α00 )
= −
k2
τ
τ (s) =
(α0 (s), α00 (s), α000 (s))
hα00 (s), α00 (s)i
b-) E§er α(s) yerine α(−s) alnsayd,
dα(−s)
dα(−s) d(−s)
dα(t)
=
=
(−1) = −α0 (t) = −α0 (−s),
ds
d(−s) ds
dt
−α0 (s) ile ayn.
Böylece,
α0 (−s) = −α0 (s), α00 (−s) = α00 (s), α000 (−s) = −α000 (s)
olup, a-) da elde edilen e³itlikte yerine yazlrsa,
τ (−s) =
(−α0 (s), α00 (s), −α000 (s))
= τ (s)
hα00 (s), α00 (s)i
elde edilir.
Örnek 1.3.29
α(u) = (a cos u, a sin u, bu),
(a, b ∈ R sabitler)
e§risinin herhangi bir noktasndaki te§et do§rusunun denklemini yaznz.
Çözüm 1.3.30 Do§rultman vektörü:
α0 (u) = (−a sin u, a cos u, b)
Nokta:
α(u) = (a cos u, a sin u, bu)
Temsilci nokta:
X = (x, y, z)
olmak üzere, te§et do§rusunun denklemi
d:
x − a cos u
y − a sin u
z − bu
=
=
−a sin u
a cos u
b
38
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
³eklindedir. sin u ve cos u nun sfr olabilece§i noktalar göz önüne alarak
do§runun standart yazl³ yerine,
x = −λa sin u + a cos u
y = λa cos u + a sin u
z = λb + bu
³ekli daha uygundur.
Örnek 1.3.31
α(0) = (1, 0, −3)
α0 (t) = (t, et , t2 )
¾
olmak üzere belli olan α e§risinin denklemini yaznz.
Çözüm 1.3.32 Problemin çözümü aslnda bir diferansiyel denklem çözümüdür.
Buna göre, ilgili denklem
dα1 (t)
dt
dα2 (t)
dt
dα3 (t)
dt
olarak yazlabilir. Böylece,
= t,
α1 (0) = 1,
= et ,
α2 (0) = 0,
= t2 ,
α3 (0) = −3,
t2
+ c1 ,
2
α2 (t) = et + c2 ,
t3
α3 (t) =
+ c3 ,
3
α1 (t) =
olup α(t) e§risi,
α(t) = (
α1 (0) = 1,
α2 (0) = 0,
α3 (0) = −3,
t2
t3
+ 1, et , − 3)
2
3
parametrik ifadesiyle belli olur.
Örnek 1.3.33
α(s) = (a cos s, a sin s, bs),
e§risinin,
a ) Oskülatör düzlemlerinin denklemini,
b ) Oskülatör (e§rilik) çemberlerini,
√
c ) a) ve b) ³klarn a = √12 , b = 23 , s =
a2 + b2 = 1
π
2
için örnekleyiniz.
1.3 HIZ VEKTÖRÜ VE YAY UZUNLUU
39
Çözüm 1.3.34 a ) Bir uzay e§risinin oskülatör düzlemlerinin denklemi
−−−−−−→ −
→
→
det[X − α(s), t (s), −
n (s)] = 0
olarak bellidir. X = (x, y, z) düzlemin temsilci noktas olmak üzere
α0 (s) = (−a sin s, a cos s, b)
° 0 °
−−−→
→
°α (s)° = 1 ⇒ −
t (s) = α0 (s)
α00 (s) = (−a cos s, −a sin s, 0)
° 00 °
°α (s)° = a
α00 (s)
−
→
n (s) =
= (− cos s, − sin s, 0)
kα00 (s)k
det[
x − a cos s y − a sin s z − bs
−a sin s
a cos s
b
]=0
− cos s
− sin s
0
den
b sin sx − b cos sy + (z − bs)a = 0
elde edilir.
b ) Oskülatör Çemberi = Oskülatör Küre ∩ Oskülatör Düzlem
−−→ −−−−→
→
OM = Oα(s) + R−
n (s)
°
°
1
1
k = °α00 (s)° = a, R = =
k
a
−−→
1
OM = (a cos s, a sin s, bs) + (− cos s, − sin s, 0)
a
−−→
1
1
OM = (a cos s − cos s, a sin s − sin s, bs)
a
a
1
1
1
BR (M ) = (x − (a cos s − cos s))2 + (y − (a sin s − sin s))2 + (z − bs)2 = 2 .
a
a
a
Böylece, oskülatör çember
BR (M ) = (x − (a cos s −
1
1
1
cos s))2 + (y − (a sin s − sin s))2 + (z − bs)2 = 2
a
a
a
küresi ve
b sin sx − b cos sy + (z − bs)a = 0
40
R3 te ERLER ve VEKTÖR ALANLARI
II. DERS
düzleminin arakesiti √olan çemberdir.
c ) a = √12 , b = 23 , s = π2 için oskülatör çember
√
1
3π
M = (0, − √ ,
),
2 4
√
R =
2
olmak üzere
1
B√2 (M ) = x + y + z + √ y −
2
2
küresi ve
2
2
√
3π
1 √
3π 2
z+( − 2+
)=0
2
2
16
√
√
3
1
3π
x+ √ z− √ =0
2
2
2 2
düzleminin arakesiti olarak bulunur.
Al³trma 1.3.35 1 ) α(t) = (3 cos 2t, 3 sin 2t) e§risini yay uzunlu§u para-
metresiyle ifade ediniz.
2 ) α(t) = (2 cos t, 2 sin t, 5) e§risini yay uzunlu§u parametresiyle ifade
ediniz.
3 ) α(t) = (t, t2 ) e§risinin t = 0, 1, −1 de§erleri için hzlarn kar³la³trnz.
4 ) α(t) = (cos t, sin t) e§risinin t = 0, π2 , π, 3π
2 de§erleri için hzlarn
kar³la³trnz.
5 ) α(t) = (cos t, sin t, bt), (b = adım) e§risinin t = 0, π, −π de§erleri
için hzlarn kar³la³trnz.
6 ) α(t) = (t, 2t, et ) e§risinin t = 0 noktasndaki hz vektörünü do§rultman vektör kabul eden do§runun denklemni yaznz.
7 ) α : I → R3 , α(t) = ( 45 cos t, 2 − sin t, 53 sin t) e§risinin t = 0 noktasndaki Frenet elemanlarn, te§et, normal ve rektifyen düzlem denklemlerini
yaznz.