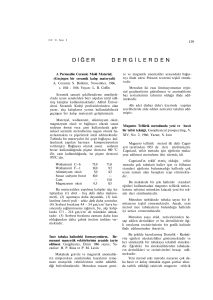
AquaJelly
Elektrikli kumanda
üniteli yapay denizanası
Bağımsız şekilde kontrol edilen bir denizanası
Rombik eklem mekanizmalı sekiz Fin Ray® tentakülü
Denizanaları, yaklaşık yüzde 99‘u sudan oluşan büyüleyici yaratıklardır. Milyonlarca yıl boyunca tuzlu ve tatlı suda en değişken
ortamlara verimli şekilde uyum sağlamışlardır. Yapay bir denizanası geliştirmeye çalışmak sadece bu büyüleyici deniz yaratıklarının
içyüzünü daha iyi anlama ve onlardan öğrenme girişimi olarak
görülebilir.
AquaJelly, elektrikli tahrik mekanizması olan yapay ve otonom bir
denizanası olmasının yanı sıra toplanma davranışını taklit eden bir
yapısı vardır. Yarı şeffaf bir yarım küre, su geçirmeyen bir merkezi
gövde ve itici güç için sekiz adet tentakülden oluşur. AquaJelly‘nin
yarı saydam yarımküre kubbesi; entegre basınç, ışık ve radyo sensörlerine sahip bir dairesel kontrol paneli barındırır. Tahrik sisteminin yönü bir işlemci tarafından sürekli olarak izlenir.
Kontrol paneli sensörlerle birlikte birkaç AquaJelly‘nin haberleşmesine izin veren 8 beyaz ve 8 mavi LED içerir. AquaJelly, dış tarafında
iletken metal boyayla kaplanmış iki adet eşmerkezli gümüş halkaya
sahiptir; bu halkalara, denizanasına enerji sağlayan bir şarj kontrol
ünitesi bağlanmıştır. AquaJelly su yüzeyi üzerinde bulunan bir şarj
istasyonuna yaklaştığında, istasyona doğru çekilir ve enerji verilir. Şarj istasyonu, şarj için enerji transferi amaçlı entegre temas
noktalarına sahip bir Festo ESS vakum jeneratöründen ibarettir.
AquaJelly‘ler, her bir denizanasına yeterli enerji sağlandığından
emin olmak için şarj istasyonuyla haberleşirler. AquaJelly‘nin ana
bileşeni; bir merkezi elektrik motoru, iki lityum-iyonlu polimer akümülatör bataryası, şarj kontrol ünitesi ve çalkantı sacı barındıran
2
bir lazerle-sinterlenmiş su geçirmez gövdeden oluşur. Bir tam şarj
işlemi yaklaşık 3 saat sürer.
Elektrik motoru, iki krank yoluyla su geçirmez gövdenin üst ve alt
taraflarına takılan tahrik plakalarına güç verir; kranklar 60 derece
açıyla yapılandırılmışlardır. Tahrik plakalarına, tentaküllere dalga
hareketi yaptıran sekiz adet rombik mafsal bağlanmıştır. Tentaküller, balık kanadının fonksiyonel anatomisinden türetilen bir yapı
olan FinRay Effect® temelli yapılar olarak tasarlanmıştır. Gerçek
yapı, kirişlerle bağlanan iki adet alternatif hareketli gerilim ve
basınç kanadından oluşur Eğer bir kanada gerilim uygulanırsa, geometrik yapı otomatik olarak uygulanan kuvvet yönünde bükülür.
Sekiz adet tentakül‘ün rombik mafsallar yoluyla geciktirilmiş aktivasyonu, itici güç üreten bir normal dalga hareketine neden olur.
Tentaküller birlikte, kendi biyolojik modellerininkine benzeyen ileri
yönlü bir peristaltik hareket üretir.
AquaJelly‘nin üç boyutlu uzaydaki hareket kontrolü, ağırlık deplasmanı yoluyla gerçekleştirilir. Bu amaç için, merkezi su geçirmez
gövdeye entegre edilen iki adet aktüatör, dört uzamsal yönde hareket ettirilebilen dört kollu bir sarkacı çalıştıran bir taşıyıcı plakayı
kontrol eder. Sarkaç belirli bir yönde hareket ettiğinde, AquaJelly‘nin kütle merkezi de buna uygun olarak yer değiştirir, denizanası daha sonra sarkacın yer değiştirme yönünde hareket eder.
Bu peristaltik hareket aracılığıyla, AquaJelly herhangi bir uzamsal
boyutta hareket edebilir.
İki entegre temas noktası yoluyla enerji transferi
İnfrared LED‘lere sahip kontrol paneli
Denizanasının sensör sistemi, farklı araçlar kullanan üç bileşen içerir. Bir basınç sensörü, AquaJelly‘nin havuzdaki derinliğinin birkaç
milimetreye kadar belirlenmesini mümkün kılar. Böylece AquaJelly
kendi konumunu tam olarak bilebilir ve kendisini belirli bir basınç
bölgesine konumlandırabilir. Aynı zamanda, yeniden şarj olabilmek
için yüzeye çıkması gerektiğinden yüzeye doğru stratejik bir şekilde
yüzebilmek için basınç sensörünü kullanır. AquaJelly, su yüzeyinde
haberleşmek için, şarj istasyonuyla bilgi değiş-tokuşu yapmasını
ve istasyonun bulunduğu yüzeydeki diğer AquaJelly‘lere sinyal
gönderemesini olanaklı kılan enerji-verimli ve kısa menzilli bir
haberleşme sistemi olan ZigBee® radyo sistemini kullanır. Radyo
dalgaları fiziksel olarak belirlenen minimum derinliğe nüfuz eder ve
AquaJelly tanımlanan bir aralıkta hangi şarj istasyonuna yaklaşacağına karar verir.
AquaJelly, içerisinde sınırlı sayıda şarj istasyonu bulunan ve
mesafe olarak sınırlı bir senaryo dahilinde yer alır. Dolayısıyla,
çeşitli AquaJelly‘ler hayatta kalmak için sürü içerisinde yaşayan
denizanası sayısını maksimize etmek amacıyla bu istasyonların
ideal, eşit dağılımlı kullanımı için çaba göstermelidir. Bu nedenle,
su havuzundaki sürünün varlığını güvenceye almak için, mekanın
maksimum kullanımını sağlamak, yani diğer denizanalarıyla çarpışmaktan kaçınmak ve şarj istasyonlarını koordineli bir şekilde
kullanmak çok önemlidir. Aynı zamanda, AquaJelly tüm dış etkilere
karşı da tepki gösterebilir.
Bununla birlikte, su altında ana haberleşme aracı ışıktır.
AquaJelly, kubbe kısmının iç tarafındaki bir halka üzerinde yer alan
on bir adet infrared LED‘e sahiptir. AquaJelly bu diyotların 20° aralık açısı temelinde ve darbeli infrared sinyallerini kullanarak, yaklaşık 80 cm‘lik bir mesafeye kadar kendisini çevreleyen küresel uzay
dahilinde haberleşme yapabilir. Böylece AquaJelly, örneğin, yaklaşan başka bir denizanasından bir konum sinyali aldığında zamanında kaçma hareketi yapabilir. Kendi çevresini izleyen sensörlere
ilave olarak, AquaJelly aynı zamanda enerji durumunu izleyen bir iç
sensör sistemine ve tahrik sisteminin yönünü kaydetmesini mümkün kılan bir manyetik anahtara sahiptir.
Akıllı adaptif bir mekanizma ve akıllı otonom elektronik devrelerle
donatılmış bir merkezi elektrik tahrik birimi, otonom kontrol edilen
sistemlere yönelik yeni uygulamalar için olanaklı olabilir. Eğer
birkaç AquaJelly‘ye ortak bir haberleşme yeteneği kazandırılırsa,
daha üst gelişme seviyesine sahip bir sistem davranışı gösteren
bir sürü olarak hareket edebilirler. Eğer bu prensip genişletilerek
otomasyona uygulanırsa, büyük ölçekli sorunları çözmek amacıyla
çok sayıda bağımsız veya kısmen bağımsız akıllı sistem -küçük
sistemler arasında stratejik işbirliği yapmak suretiyle- birlikte çalışabilirler.
Her bir denizanası, - örneğin, şarj koşuluna, tahrik sisteminin yönüne veya başka bir AquaJelly‘nin yaklaşmasına bağlı oluşabilecek
çevresel koşullara göre nasıl hareket edeceğine bağımsız ve otonom olarak karar verir. AquaJelly kümesinin toplam yüzme davranışı önceden belirlenmiş bir kontrol olmaksızın ortaya çıkmakla yani
beklenmedik olmakla birlikte, her bir AquaJelly‘lerin basit davranış
kurallarından bir tanesinin o an için uygun bir tanesinin seçilmesi
sonucu kolektif olarak ortaya çıkar ve canlı denizanası sayısını
maksimize edecek
3
Proje ortakları
Proje öncüsü:
Dr. Wilfried Stoll, Denetleme Kurulu Başkanı, Festo AG
Denizanasının mekanik tasarımı ve yapımı:
Rainer ve Günther Mugrauer,
Clemens Gebert,
Effekt-Technik GmbH, Schlaitdorf, Almanya
Otonomi ve toplanma davranışı
Paralel ve Dağıtılmış Sistemler Enstitüsü, Stuttgart Üniversitesi
Doğa Bilimleri Prof. Dr. Öğr. Üyesi Paul Levi,
Doğa Bilimleri Doktoru Serge Kernbach,
Bilgisayar Mühendisi Frank Schreiber,
Bilgisayar Mühendisi Kristof Jebens
Teknik veriler
1x mikroişlemci– ışıkla haberleşme – ATmega168,
8 MHz pals, RAM 1 kbyte, flash bellek 16 kbyte, 512 EEPROM
1x mikroişlemci – motor kontrolü – ATmega168, 8 MHz pals, RAM 1
kbyte, flash bellek 16 kbyte, 512 EEPROM
1x mikroişlemci – radyo haberleşmesi – Meshnetics‘ten ZigBit
modülü (ATmega 1281V RAM 8 kbyte, flash bellek 128 kbyte,
EEPROM 4 kbyte + alıcı-verici AT86RF230RF)
Elektronik sistem 3.6 V‘ta çalışır; mikroişlemciler
bir I2C veriyolu vasıtasıyla haberleşir.
1x basınç + sıcaklık sensörü.
Üretici: VTI, tip: SCP 1000, Hassasiyet: 1 mm su derinliği
11x infrared iletim LED‘leri, toplam iletim gücü
yakl. 2 mW
11x infrared alıcı üniteleri (PCM)
Şarj istasyonunun mekanik tasarımı ve yapımı,
akvaryum prose teknolojisi:
Uwe Neuhoff, Display Construction, Festo AG & Co. KG
Henry Köllmann, Henry Köllmann Elektrik, Pneumatic, Electronic,
Schwäbisch Gmünd, Almanya
Proje Müdürü:
Markus Fischer, Kurumsal Tasarım
Festo AG & Co. KG
Akvaryum yapımı:
Walz GmbH, Leinfelden-Echterdingen, Almanya
Grafik Tasarım:
Atelier Frank, Berlin, Almanya
Fotoğraflar:
Walter Fogel, Angelbachtal, Almanya
Markalar:
Fin Ray Effect®, Evologics GmbH şirketinin markasıdır
1x verimli, Hot Swap® denetleyicili, entegre otomatik
emniyet şalterli otomatik akümülatör bataryası izleme – LiPo koruyucu – üretici: MAXIM, tip: DS 2764; şarj düzenleme – üretici:
Texas Instruments, tip: BQ 24100; Hot Swap®
denetleyici – üretici: Linear Technology, tip: LTC4211
1x bireysel olarak tasarlanmış kontrol paneli (yuvarlak)
¼ Film
Ana motor için 1x H-köprü güç kademesi: Üretici:
STMicroelectronics, tip: L298, load 3 A‘e kadar yük kapasitesi
Yön kontrolü için, doğrudan mikroişlemciler tarafından kontrol
edilen 2x aktüatör
3D eğiklik kontrolü için dijital 3-eksenli hızlanma sensörü - üretici:
ST Microelectronics, tip: LIS302DL
Akümülatör bataryaları: Lityum polimer, 4.2 V; kapasite 4,000 mA
Motor: Çan-tipi endüvi motor, 3 V
Transmisyon: Yukarı yönlü episiklik dişli takımı, oran 1:180